Изобретение относится к области машиностроения и может быть использовано в быстровращающихся высоконагруженных роторных машинах.
В качестве прототипа данного технического решения выбран управляемый газомагнитный подшипниковый узел, содержащий корпус, в котором установлен вкладыш газостатического подшипника скольжения, вал, размещенный во вкладыше, электромагнитный подшипник, содержащий более одного электромагнита, полюса и ярма электромагнитов, установленные продольно в корпусе, обмотки электромагнитов, расположенные на ярмах, отверстия для пористых вставок, расположенные во вкладыше подшипника скольжения, камеру для подачи газовой смазки в пористые вставки, расположенную между вкладышем подшипника скольжения и корпусом, отверстие, выполненное в корпусе для подачи газовой смазки в камеру, а также датчики измерения зазора, установленные на полюсах электромагнитов. (Патент RU №2545146, МПК F16C 32/04, F16C 39/06, опубликовано 27.03.2015 г.).
Недостатком данного управляемого газомагнитного подшипника является использование газостатического подшипника с жесткой опорной поверхностью, который обладает меньшим демпфированием по сравнению с газовым подшипником с упругой опорной поверхностью, а также отсутствие возможности определять частоту вращения вала, что не позволяет управлять подшипниковым узлом при разной частоте вращения вала, так как с увеличением частоты вращения вала в газовом подшипнике возникает и увеличивается газодинамическая сила, что приводит к перераспределению реакций между газовым и электромагнитным подшипником, которое не учитывается при управлении электромагнитами.
Техническая задача, которую решает данное изобретение - улучшение динамических характеристик, повышение надежности и ресурса системы "ротор - опоры" за счет применения лепесткового газодинамического подшипника и датчика частоты вращения вала.
Поставленная задача достигается тем, что управляемый газомагнитный подшипниковый узел содержит корпус, в котором установлен вкладыш подшипника скольжения, вал, размещенный во вкладыше, электромагнитный подшипник, содержащий более одного электромагнита, полюса и ярма электромагнитов, установленные в корпусе, обмотки электромагнитов, расположенные на ярмах, датчики измерения зазора. Согласно изобретению, полюса и ярма электромагнитов установлены поперечно во вкладыше газодинамического подшипника скольжения и в корпусе, в котором установлены датчик измерения частоты вращения вала и датчики измерения зазора, а на внутренней поверхности вкладыша смонтированы лепестки.
Технический результат применения данного устройства заключается в улучшении динамических характеристик, повышении надежности и ресурса системы "ротор - опоры".
Сущность изобретения поясняется чертежами.
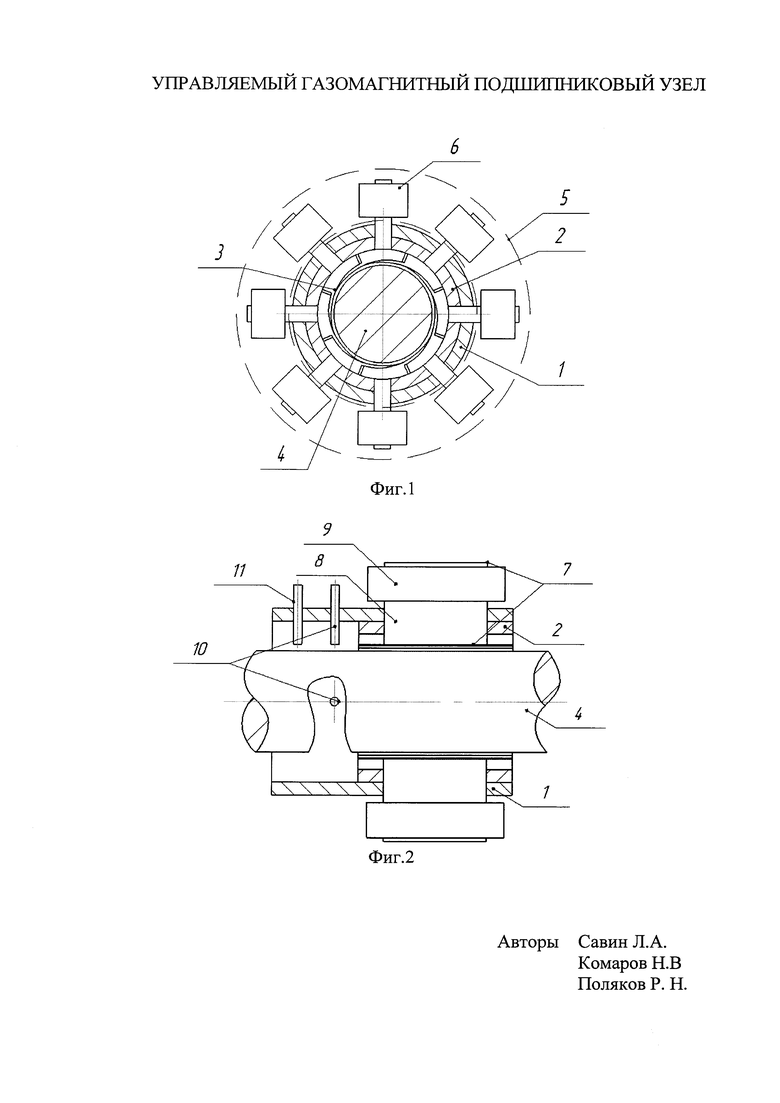
На фиг. 1 изображен управляемый газомагнитный подшипниковый узел с отжатыми от вала упругими лепестками (поперечный разрез); на фиг. 2 изображен управляемый газомагнитный подшипниковый узел с отжатыми от вала упругими лепестками (продольный разрез).
Подшипниковый узел (фиг. 1) содержит корпус 1, в котором установлен вкладыш 2 газодинамического подшипника скольжения, на внутренней поверхности которого смонтированы упругие лепестки 3, вал 4, размещенный во вкладыше 2, электромагнитный подшипник 5, содержащий более одного электромагнита 6.
Подшипниковый узел (фиг. 2) дополнительно содержит полюса 7 и ярма 8 электромагнитов 6, установленные поперечно в корпусе 1 и во вкладыше 2, обмотки 9 электромагнитов 6, расположенные на ярмах 8, датчики 10 измерения зазора и датчик 11 измерения частоты вращения вала 4, смонтированные в корпусе 1.
Устройство работает следующим образом.
В начальный промежуток времени вал 4 остановлен, а передача нагрузки с вала 4 на корпус 1 осуществляется через упругие лепестки 3. На основе данных, получаемых с датчиков 10 измерения зазора и датчика 11 измерения частоты вращения вала 4, происходит управление магнитной силой, которая регулируется за счет изменения силы тока, протекающего по обмоткам 9 электромагнитов 6. Регулирование выполняется для каждого электромагнита 6 в отдельности. Создаваемая магнитная сила передает нагрузку с вала 4 на корпус 1. При этом упругие лепестки 3 под действием магнитной силы отжимаются от вала 4, в результате чего между валом 4 и лепестками 3 образуется зазор, заполняемый смазочным материалом.
С увеличением скорости вращения вала 4 в смазочном материале возникает газодинамическая реакция, из-за чего происходит перераспределение реакций между газодинамическим подшипником и электромагнитным подшипником 5. В результате нагрузка с вала 4 на корпус 1 дополнительно осуществляется через смазочный слой газодинамического подшипника и упругие лепестки 3.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАБОТЫ УПРАВЛЯЕМОГО ГАЗОМАГНИТНОГО ПОДШИПНИКОВОГО УЗЛА И ПОДШИПНИКОВЫЙ УЗЕЛ | 2013 |
|
RU2545146C1 |
| Активный упорный гидро/аэростатодинамический подшипниковый узел и способ управления его характеристиками | 2019 |
|
RU2714278C1 |
| РОТОРНАЯ СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ | 2018 |
|
RU2757704C1 |
| УПОРНЫЙ ЛЕПЕСТКОВЫЙ ГАЗОДИНАМИЧЕСКИЙ ПОДШИПНИК | 2018 |
|
RU2710091C1 |
| УСТАНОВКА ДЛЯ ИССЛЕДОВАНИЯ РОТОРНЫХ СИСТЕМ С МНОГОЗОННОЙ ПОДАЧЕЙ СМАЗОЧНОГО МАТЕРИАЛА | 2019 |
|
RU2733996C1 |
| УСТАНОВКА ДЛЯ ИССЛЕДОВАНИЯ РОТОРНЫХ СИСТЕМ С АКТИВНЫМ УПРАВЛЕНИЕМ | 2020 |
|
RU2749362C1 |
| УСТАНОВКА ДЛЯ ИССЛЕДОВАНИЯ РОТОРНЫХ СИСТЕМ С АКТИВНЫМ УПРАВЛЕНИЕМ | 2019 |
|
RU2734066C1 |
| ИСПЫТАТЕЛЬНЫЙ СТЕНД ДЛЯ ИССЛЕДОВАНИЯ РОТОРНЫХ СИСТЕМ | 2016 |
|
RU2651643C1 |
| МНОГОЛЕПЕСТКОВЫЙ МЕХАТРОННЫЙ ГАЗОДИНАМИЧЕСКИЙ ПОДШИПНИК | 2019 |
|
RU2708413C1 |
| ЭКСПЕРИМЕНТАЛЬНАЯ УСТАНОВКА ДЛЯ ИССЛЕДОВАНИЯ РОТОРНО-ОПОРНЫХ УЗЛОВ | 2020 |
|
RU2749412C1 |
Изобретение относится к области машиностроения и может быть использовано в быстровращающихся высоконагруженных роторных машинах. Управляемый газомагнитный подшипниковый узел содержит корпус, в котором установлен вкладыш подшипника скольжения, вал, размещенный во вкладыше, электромагнитный подшипник, содержащий более одного электромагнита, полюса и ярма электромагнитов, установленные в корпусе, обмотки электромагнитов, расположенные на ярмах, датчики измерения зазора. Полюса и ярма электромагнитов установлены поперечно во вкладыше газодинамического подшипника скольжения и в корпусе, в котором установлены датчик измерения частоты вращения вала и датчики измерения зазора. На внутренней поверхности вкладыша смонтированы лепестки. Технический результат: улучшение динамических характеристик, повышение надежности и ресурса системы "ротор - опоры". 2 ил.
Управляемый газомагнитный подшипниковый узел, содержащий корпус, в котором установлен вкладыш подшипника скольжения, вал, размещенный во вкладыше, электромагнитный подшипник, содержащий более одного электромагнита, полюса и ярма электромагнитов, установленные в корпусе, обмотки электромагнитов, расположенные на ярмах, датчики измерения зазора, отличающийся тем, что полюса и ярма электромагнитов установлены поперечно во вкладыше газодинамического подшипника скольжения и в корпусе, в котором установлены датчик измерения частоты вращения вала и датчики измерения зазора, а на внутренней поверхности вкладыша смонтированы лепестки.
| СПОСОБ РАБОТЫ УПРАВЛЯЕМОГО ГАЗОМАГНИТНОГО ПОДШИПНИКОВОГО УЗЛА И ПОДШИПНИКОВЫЙ УЗЕЛ | 2013 |
|
RU2545146C1 |
| СПОСОБ РАБОТЫ ПОДШИПНИКОВОГО УЗЛА И ПОДШИПНИКОВЫЙ УЗЕЛ | 2007 |
|
RU2347960C1 |
| Комбинированная опора | 1975 |
|
SU583339A2 |
| Комбинированная опора | 1975 |
|
SU543786A1 |
| US 2008231128 A1, 25.09.2008. | |||

