Устройство относится к области морского приборостроения и предназначено для использования в качестве относительного и абсолютного лага, а также измерителя скорости течений для приповерхностных и глубоководных исследований преимущественно при малых глубинах под килем.
Известны лазерные доплеровские измерители скорости с использованием призменных делителей лазерного пучка (Б.С. Ринкявичюс. Лазерная диагностика потоков. МЭИ, 1990 [1]). Их недостатком является чувствительность к разъюстировке призменного делителя или лазера, значительное влияние загрязнения защитного оптического окна, возможность использования только одномодовых лазеров с системой температурной стабилизации. Известен также лазерный доплеровский измеритель скорости, содержащий передающий канал с дифракционно-оптическим делением лазерного пучка и приемный канал, включающий фокусирующий объектив, диафрагму, фотодиод и предварительный усилитель («Применение дифракционных решеток в лазерной доплеровской анемометрии. Technisches Messen, 61, 1994 7/8, стр. 311-316 [2]).
Недостатком рассмотренного лазерного доплеровского измерителя скорости является большая погрешность измерения скорости, обусловленная наличием пограничного слоя (слоя воды, непосредственно прилегающего к поверхности обтекаемого тела), что ограничивает возможность использования лазерного измерителя в качестве относительного лага и измерителя скорости течения. Реально толщина пограничного слоя может достигать 500-1000 мм в зависимости от размера судна, с которого осуществляется измерение, а стандартное рабочее расстояние дифракционных лазерных доплеровских измерителей скорости 100-200 мм.
Увеличение рабочего расстояния приводит к увеличению габаритов лазерного датчика и усложнению конструкции, а также к значительному увеличению потерь мощности лазерного излучения в воде, что практически ограничивает реализацию дифракционного лазерного доплеровского измерителя скорости с рабочим расстоянием более 200-300 мм. Известные также аналогичные устройства (авторское свидетельство SU №1249463 А1, 07.08.1986 [3], патент JP №1249463 А1, 07.08.1989 [4], заявка JP №60093956 А, 25.05.1985 [5], заявка US №2004036873 А1, 26.02.2004 [6], Лазерный доплеровский измеритель скорости для промышленности и транспорта/Ю.Д. Каминский и др. // Лазер-Информ. Информационный бюллетень лазерной ассоциации. №1-2 (592-593), январь 2017, с. 3-7 [7]). также имеют погрешность неприемлемую при измерении скорости судов. Задачей, на решение которой направлено также известное устройство (патент RU №2435166 С1, 27.11.2011 [8]), является создание лазерного доплеровского измерителя скорости, обеспечивающего минимизацию погрешности измерения скорости, обусловленную пограничным слоем, что решается за счет того, что лазерный измеритель скорости водных потоков, содержащий передающий канал с дифракционно-оптическим делением лазерного пучка и приемный канал, включающий фокусирующий объектив, диафрагму, фотодиод и предварительный усилитель, подключенный к преобразователю доплеровского сигнала, содержит вычислительное устройство, а в приемный канал дополнительно введены вторая диафрагма и второй фотодиод с предварительным усилителем, подключенным ко второму преобразователю доплеровского сигнала, при этом выходы преобразователей доплеровского сигнала подключены к вычислительному устройству.
При этом устройство состоит из полупроводникового лазерного модуля, дифракционной решетки, объектива, пространственного фильтра, объектива, образующих передающий канал с дифракционно-оптическим делением лазерного пучка. Приемный канал содержит фокусирующий объектив, две диафрагмы, два фотодиод, два предварительных усилителя, два преобразователя доплеровского сигнала. Выходы преобразователей подключены к вычислительному устройству. Конструктивно все элементы размещены в герметичном корпусе с защитным окном.
Известное устройство [8] работает следующим образом: световой пучок лазерного модуля падает на дифракционную решетку, на выходе которой в результате дифракции и интерференции в дальней зоне получается семейство порядков дифракции. После прохождения телецентрической системы (объективы, пространственный фильтр) остаются только ± первые порядки дифракции, которые, пересекаясь в воде, образуют протяженную пространственную интерференционную картину (решетку). Рассеянное оптическими неоднородностями при пересечении решетки лазерное излучение фокусируется объективом через диафрагмы на фотодиодах, преобразующих это излучение в доплеровские сигналы, которые усиливаются в предварительных усилителях и в преобразователях доплеровского сигнала преобразуются в значения скорости на расстоянии «l1» и «l2» - «u11» и u12». В вычислителе определяется значение скорости "u0" на основном участке потока вне пограничного слоя путем решения двух уравнений с двумя неизвестными «u0» и «δ»:
где u(l1) и u(l2) - измеренные значения скорости на расстоянии l1 и l2 от выходного окна измерителя,
δ - толщина пограничного слоя,
u0 - вычисленное значение скорости с учетом толщины пограничного слоя (на расстоянии «δ» от днища судна в основном участке потока).
Применение известного устройства [8] позволяет минимизировать погрешность измерения скорости, определяемую толщиной пограничного слоя, и в процессе эксплуатации в значительной степени сократить достаточно трудоемкие периодические испытания в стационарных условиях, когда известна толщина пограничного слоя. Однако измерение скорости судна в реальных условиях плавания с последующим использованием измеренных значений скорости при решении навигационных задач или задач по управлению судна в сложных навигационных условиях с обеспечением требований к навигационной безопасности судовождения практически не выполнимо, особенно для крупнотоннажных судов.
Задачей предлагаемого технического решения является расширение функциональных возможностей лазерного судового измерителя скорости за счет уменьшения негативных обстоятельств, влияющих на точность измерения скорости при его использовании на судах различного назначения.
Поставленная задача достигается за счет того, что в лазерном судовом измерителе скорости, содержащим передающий канат, включающий полупроводниковый модуль с дифракционно-оптическим делением лазерного пучка и содержащий полупроводниковый модуль, дифракционную решетку, первый объектив, пространственный фильтр, второй объектив, и приемный канал, включающим фокусирующий объектив, диафрагму, фотодиод и предварительный усилитель, подключенный к преобразователю доплеровского сигнала, вычислительное устройство, при этом приемный канал дополнительно содержит вторую диафрагму и второй фотодиод с предварительным усилителем, подключенным к второму преобразователю доплеровского сигнала, при этом выходы преобразователей доплеровского сигнала подключены к вычислительному устройству, передающий и приемный канаты размещены в герметичном корпусе, снабженным в нижнем основании корпуса защитным окном, в отличие от прототипа [8], лазерный судовой измеритель скорости содержит «n» передающих и приемных каналов, размещенных соответственно в «n» герметичных корпусах, установленных по обоим бортам судна соответственно в носовой, кормовой и центральной частях судна, при этом герметичные корпуса с передающими и приемными каналами также размещены попарно в вертикальной плоскости корпуса судна, при этом один герметичный корпус с передающим и приемным каналом размещен выше ватерлинии, а другой в днище судна в телескопическом устройстве, полупроводниковые модули, размещенные в герметичных корпусах, установленных выше ватерлинии выполнены для функционирования в видимом диапазоне волн, а полупроводниковые модули, размещенные в герметичных корпусах, установленных в днище судна выполнены для функционирования в сине - зеленом диапазоне волн, в вычислительное устройство введен блок корреляционной обработки сигналов от «n» передающих и приемных каналов, вычислительное устройство своими соответствующими входами соединено также с выходами судовых датчиков измерения углов килевой и бортовой качек, вертикальных составляющих вектора скорости, в состав лазерного судового измерителя скорости введены блок классификации спектра принятых сигналов, соединенный своим входом с выходами передающих и приемных каналов, блок выбора режимов функционирования устройства, соединенный своим входом с выходом блока классификации спектра принятых сигналов, а своим выходом с входом вычислительного устройства.
Сущность предлагаемого устройства поясняется чертежами (фиг. 1, 2).
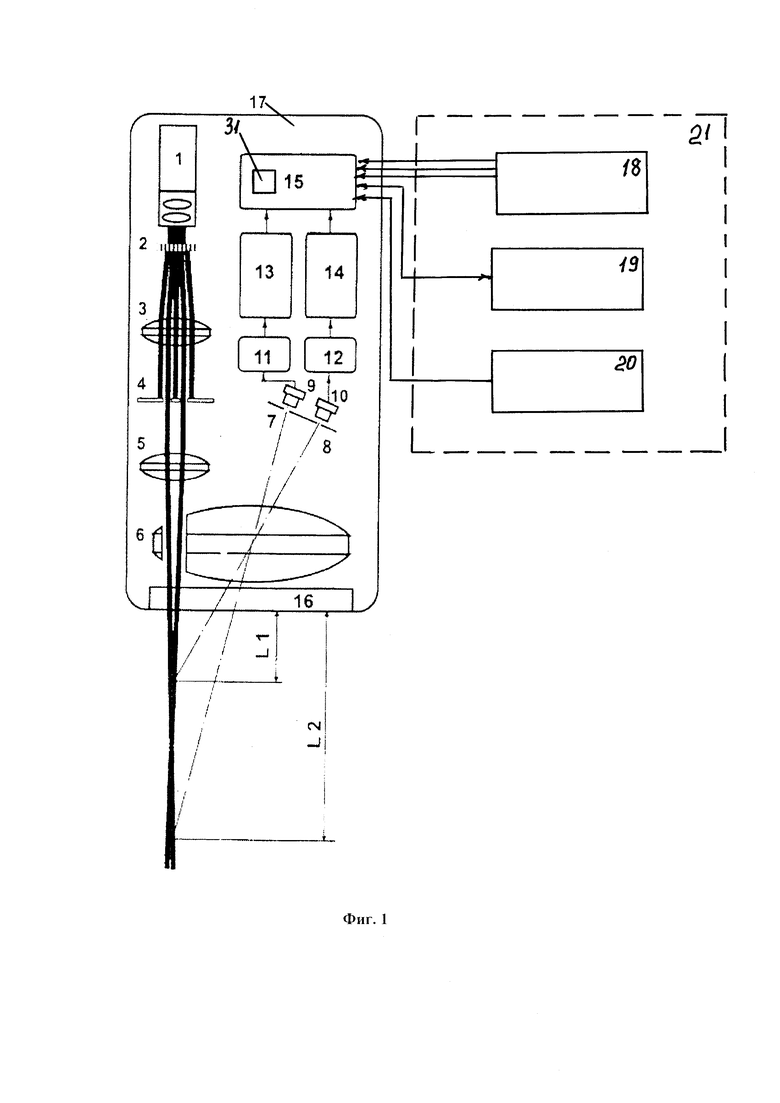
Фиг. 1. Блок-схема устройства. Устройство состоит из полупроводникового лазерного модуля 1, дифракционной решетки 2, объектива 3, пространственного фильтра 4, объектива 5, образующих передающий канат с дифракционно-оптическим делением лазерного пучка. Приемный канал содержит фокусирующий объектив 6, диафрагмы 7 и 8, фотодиоды 9, 10, предварительные усилители 11 и 12, преобразователи доплеровского сигнала 13 и 14. Выходы преобразователей 13 и 14 подключены к вычислительному устройству 15. Конструктивно элементы 1-15 размещены в герметичном корпусе 17 с защитным окном 16. Вычислительное устройство 15 своими соответствующими входами соединено также с выходами судовых датчиков 18 измерения углов килевой и бортовой качек, вертикальных составляющих вектора скорости. В состав лазерного судового измерителя скорости введены блок 19 классификации спектра принятых сигналов, соединенный своим входом-выходом с входом - выходом вычислительного устройства 15, блок 20 выбора режимов функционирования устройства, соединенный своим входом с выходом блока 19 классификации спектра принятых сигналов, а своим выходом с входом вычислительного устройства 15. Элементы 18, 19, 20 размещены в судовом навигационном модуле 21, включающим также технические средства навигации (приемоиндикаторы СНС и РНС, НРЛС, курсоуказатели, и т.п.). В вычислительное устройство 15 введен блок 31 корреляционной обработки сигналов от «n» передающих и приемных канатов.
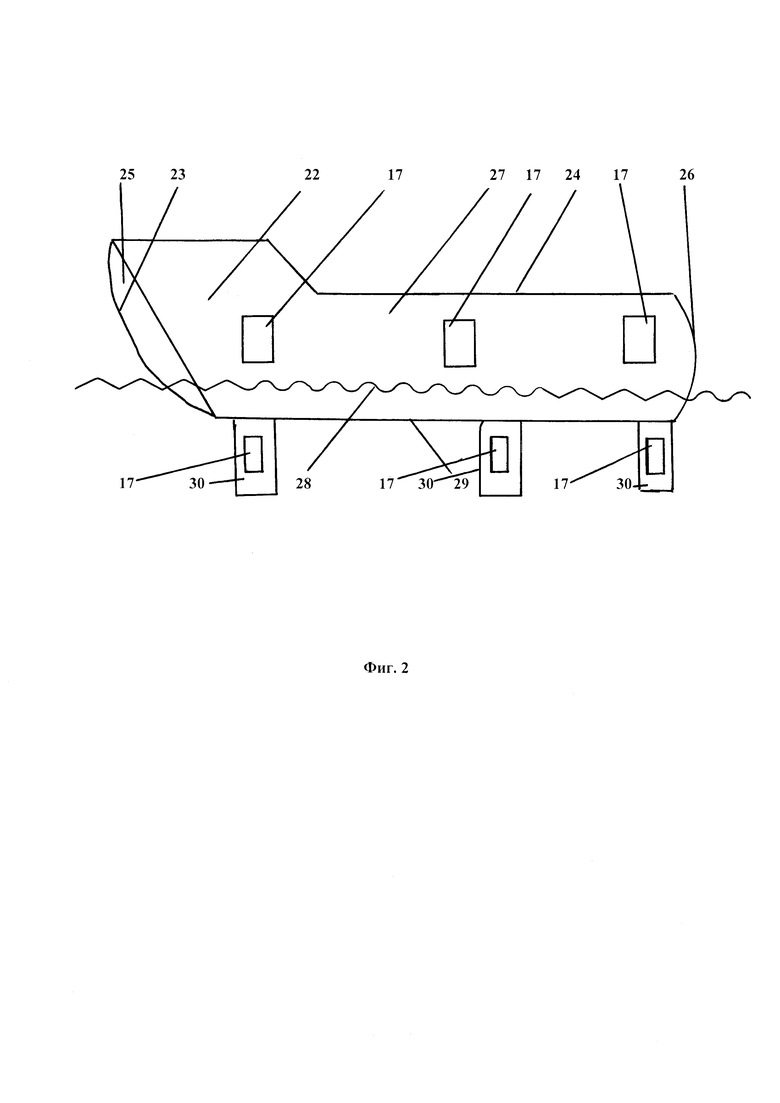
Фиг. 2. Схема размещения устройства на судне. На судне 22 «n» герметичных корпусов 17, установлены по обоим бортам 23 и 24 судна 22 соответственно в носовой 25, кормовой 26 и центральной 27 частях судна, при этом герметичные корпуса 17 с передающими и приемными канатами также размещены попарно в вертикальной плоскости корпуса судна. При этом один герметичный корпус с передающим и приемным каналом размещен выше ватерлинии 28, а другой в днище 29 судна в телескопическом устройстве 30. Полупроводниковые модули, размещенные в герметичных корпусах 17, установленных выше ватерлинии 28 и выполнены для функционирования в видимом диапазоне волн, а полупроводниковые модули, размещенные в герметичных корпусах 17, установленных в днище 28 судна 22 выполнены для функционирования в сине - зеленом диапазоне волн. Блок 19 классификации спектра принятых сигналов разработан на основе лазерного спектрометра анализатора типа ЛИС-01 (http://libs.nppsd.ru/) и предназначен для классификации спектра полученных сигналов, путем сравнения отраженных сигналов с эталонными значениями спектра сигнала, полученных при калибровки лага на испытательном полигоне при отражении сигналов как от ревербирационных слоев, так и от грунта в зависимости от скоростных режимов движения судна.
Устройство работает следующим образом.
Световой пучок лазерного модуля 1 падает на дифракционную решетку 3, на выходе которой в результате дифракции и интерференции в дальней зоне получается семейство порядков дифракции. После прохождения телецентрической системы (объективы 3 и 5, пространственный фильтр 4) остаются только ± первые порядки дифракции, которые, пересекаясь в воде, образуют протяженную пространственную интерференционную картину (решетку).
Рассеянное оптическими неоднородностями при пересечении решетки лазерное излучение фокусируется объективом 6 через диафрагмы 7 и 8 на фотодиодах 9 и 10, преобразующих это излучение в доплеровские сигналы, которые усиливаются в предварительных усилителях 11 и 12 и в преобразователях доплеровского сигнала 13 и 14 преобразуются в значения скорости потока в соответствии с зависимостями (1).
В отличие от прототипа [8] сигналы с выходов всех передающих и приемных каналов поступают на блок 19 классификации спектра принятых сигналов, посредством которого выполняется классификация спектра полученных сигналов, путем сравнения отраженных сигналов с эталонными значениями спектра сигнала, полученных при калибровки лага на испытательном полигоне при отражении сигналов как от ревербирационных слоев, так и от грунта в зависимости от штатных скоростных режимов движения судна.
С блока 19 классификации спектра принятых сигналов, сигналы поступают на блок 20 выбора режимов функционирования устройства, на котором устанавливается режим работы устройства в целом.
При отражении сигналов от подстилающей водной поверхности, формируемых посредством передающих и приемных каналов лазерных модулей 1, размещенных выше ватерлинии 28, и размещенных в днище 29 судна в телескопическом устройстве 30 при отражении сигналов от ревербирационных слоев в вычислительном устройстве 15 вычисляются значения относительной скорости движения судна с учетом поправок, обусловленных перемещением судна в вертикальной плоскости, вырабатываемых по данным судовых датчиков 18 измерения углов килевой и бортовой качек, вертикальных составляющих вектора скорости.
При отражении сигналов от грунта в вычислительном устройстве 15 вычисляются значения абсолютной скорости.
Вычислительное устройство 15 построено на основе процессора типа ADSP-21990. Размещении передающих и приемных канатов лазерных модулей 1, установленных по обоим бортам судна соответственно в носовой, кормовой и центральной частях судна по обоим бортам позволяет реализовать решение задачи оценивания доплеровских смещений в шести пространственных каналах с использованием стандартного программного обеспечения. При этом в вычислительном устройстве 15 в блоке 31 выполняется также корреляционная обработка сигналов от «n» передающих и приемных каналов. Математический аппарат алгоритма оценивания спектрального момента с использованием одного значения комплексной корреляционной функции изложен в работе (Kenneth S. Miller, Marvin М. Rochwarger. A covariance approach to spectral moment estimation. // IEEE Trans. Inform. Theory. - Vol. IT-18. - 1972. - No 5. - p. 588-596).
Опуская выкладки, приведем конечные соотношения. Значение оценки комплексной корреляционной функции для малого значения τs ≠ 0 равно:
где Z, и Zl+1 - отсчеты комплексной огибающей эхосигнала.
Оценка спектрального момента может быть получена по формуле (Kenneth S. Miller, Marvin М. Rochwarger. A covariance approach to spectral moment estimation. // IEEE Trans. Inform. Theory. - Vol. IT-18. - 1972. - No 5. - p. 588-596):

Формирователи оптических сигналов (лазерные модули 1), установленные в днище судна и выполненные в сине - зеленом диапазоне волн позволяют также реализовать задачу определения глубины под килем судна, посредством определения расстояния от днища судна до грунта при излучении сигнала в направлении дна, приема отраженного сигнала, измерения промежутка времени между моментом излучения до момента приема сигнала и вычисления по полученным результатам глубины. Измерение промежутков времени выполняют в двух точках, расположенных на известном расстоянии по вертикали, фиксируя их по двум совпадающим отличиям в форме сигналов, например, по экстремальным значениям, а глубину вычисляют по известной формуле. Излучатель лазерного передающего устройства выполнен в виде твердотельного лазера на алюмоиттриевом гранате сине - зеленного светового спектра с диапазоном длин излучаемых волн 0,42÷0,53 мкм. Фотоприемное устройство выполнено в виде оптического приемника с диаметром приемной поверхности 30 см, что обеспечивает стабильный прием отраженных сигналов в диапазоне глубин до 800 м.
Излучатель лазерного передающего устройства работает в зеленом диапазоне (532 нм) и предназначен для определения пространственного положения точек отражения от дна водоема и позволяет одновременно получать как батиметрические, так и топографические данные на прибрежную территорию. Принцип действия основан на использовании двух лазеров в ближнем ИК диапазоне (1065 нм) для определения пространственного положения точек отражения от водной поверхности и в зеленом диапазоне (532 нм) для определения пространственного положения точек отражения от дна водоема, аналогом является лазерный батиметр типа «HawkEye ll» компании АНАВ.
Лазерные модули 1, установленные выше ватерлинии представляет собой сканер, который работает в ближнем ИК диапазоне (1064 нм) и предназначен для определения пространственного положения точек отражения от водной поверхности и обеспечивает возможность работы в любое время года днем и ночью в простых метеоусловиях, аналогом является лазерный сканер типа Leica ALS 70-НР.
Устройство работает следующим образом.
Устройство управления, входящее в состав вычислительного устройства 15 запускает и блок управления и запуска лазерного модуля 1. Лазерный импульс на частоте 0,532 мкм через защитное окно 16 направляется по фиксируемому направлению перпендикулярно дну моря. Для учета временного расширения луча и освещаемой на дне площади необходимо знание гидрооптических характеристик воды в районе эксплуатации лазерного судового измерителя скорости. Для их оценки используется информация об объемном рассеянии воды, которую содержит отраженный лазерный импульс. Оценка гидрооптических характеристик воды в районе эксплуатации лага выполняется посредством блока выработки поправок, который выполнен в виде блока определения прозрачности воды и который размещен в вычислительном устройстве 15.
Отраженные импульсы через защитное окно 16 поступают на фотоприемное устройство и далее на схемы первичной и вторичной обработки и записи информации, где они регистрируются для последующей их обработки и интерпретации возможных помех в принимаемых лазерных сигналах. После обработки лазерные сигналы поступают на вход процессора, где происходит их дальнейшая обработка и расчет измеренной глубины. Расстояние до дна вычисляется по измеренному времени между моментами прихода отраженных импульсов и известной скорости света в воде с учетом задержек сигналов, в электронных цепях, прозрачности воды и рассеяния света на взвешенных частицах вещества в водной толще.
При измерении скорости судов при плавании во льдах, когда нормальная работа днищевых лазерных модулей 1 может быть нарушена движением льдов под днищем судна, измерение скорости судна выполняется посредством бортовых лазерных модулей 1 с облучением подстилающей поверхности лазерными лучами. При этом принята 4-х лучевая Х-образная схема ориентации лучей в горизонтальной плоскости путем разнесения антенны по двум бортам судна. При обработке доплеровских частот, полученных по каждому из 4-х лучей и последующего вычисления горизонтальных (Vx) и вертикальных (Vy) составляющих скорости используют доплеровские частоты накрест лежащих лучей, формируемых соответственно носовыми и центральными лазерными модулями 1, а также центральными и кормовыми лазерными модулями 1.
После обработки в преобразователях доплеровского сигнала 13 и 14 сигналы поступают на входы блока 31 корреляционной обработки сигналов, осуществляющего вычисление взаимно-корреляционной функции и слежение за ее максимумом. Система слежения блока 31 корреляционной обработки сигналов, подключенная к выходу интегратора, регулирует введенную временную задержку, поддерживая максимальное значение корреляционной функции. При этом по значению введенной задержки определяется скорость судна.
Аналогом блока 31 корреляционной обработки сигналов является дискретное корреляционное устройство, осуществляющие слежение за максимумом взаимно-корреляционной функции двух сигналов (Козубовский С.Ф. Корреляционно-экстремальные системы. Киев. Наукова думка, 1973).
Непрерывные входные сигналы в этом устройстве заменяются знакопеременными сигналами постоянной амплитуды, знаки которых соответствуют знакам входных сигналов. Эта операция называется клиппированием и выполняется с помощью усилителей-ограничителей. Далее осуществляется построение знаковой взаимно-корреляционной функции, линейно связанной с вероятностью совпадения знаков входных сигналов.
Знаковая взаимно-корреляционная функция связана с обычной нормированной взаимно-корреляционной функцией двух величин, имеющих нормальное совместное распределение.
Установленные на судне разнесенные вдоль диаметральной плоскости по обоим бортам судна лазерные модули 1 движутся одна за другой по одной и той же траектории. При этом измерение скорости сводится к нахождению временного сдвига сигналов принятых разнесенными лазерными модулями 1 вдоль бортов. Нахождение этого сдвига производится путем корреляционной обработки принятых сигналов. Для этой цели в тракт сигнала носовой лазерного модуля 1 вводится переменная временная задержка и производится вычисление взаимно-корреляционной функции огибающих сигналов разнесенных вдоль бортов лазерных модулей 1 и отслеживается ее максимальное значение на двух базах.
Слежение за максимумом взаимно-корреляционной функции осуществляется с помощью дифференциальной системы слежения, сигналом рассогласования которой является разность двух значений взаимно-корреляционной функции, соответствующих задержкам. Клиппированные сигналы подаются на входы блока регулируемой задержки, куда и подается сигнал с носового лазерного модуля 1. где он квантуется с частотой продвигающих импульсов fn=1/Tn и задерживается во времени.
По значениям измеренных задержек и известным расстояниям между лазерными модулями 1 в вычислительном устройстве 15 определяют путевую скорость судна. При этом разделение четырех лучей может осуществляется программно. В этом случае принятые сигналы носового и кормового направлений определяются выражениями:

где n=0, 1, 2, …; Δt-Mm4=0; m1, т2, т3 зависят от значений частоты сигнала и частоты дискретизации f0.
Подобные (4) и (5) выражения имеют место для разделения сигналов Un0(nΔt) правого и U10(nΔt) левого бортов. Программная реализация выражений (4) и (5) осуществляется с использованием восьми кольцевых буферов, в которые поступают выходные коды АЦП.
Сигналы (4) и (5) могу т прореживаться, т.к. последующая обработка может производиться на существенно более низкой частоте дискретизации.
Связь с другими навигационными системами может быть осуществлена по интерфейсу RS-232 (последовательный порт процессора). Решение задачи оценивания доплеровских смещений в четырех пространственных каналах может производиться программно на процессоре ADSP-21990. Математический аппарат алгоритма оценивания спектрального момента с использованием одного значения комплексной корреляционной функции изложен в работе (Kenneth S. Miller, Marvin М. Rochwarger. A covariance approach to spectral moment estimation. // IEEE Trans. Inform. Theory. - Vol. IT-18. - 1972. - No 5. - p. 588-596).
Значение оценки комплексной корреляционной функции для малого значения τ5 ≠ 0 равно:
где Z, и Zl+1 - отсчеты комплексной огибающей эхосигнала.
Оценка спектрального момента может быть получена по формуле (Kenneth S. Miller, Marvin М. Rochwarger. A covariance approach to spectral moment estimation. // IEEE Trans. Inform. Theory. - Vol. IT-18. - 1972. - No 5. - p. 588-596):

При отражении сигналов от грунта из обработки исключаются фрагменты обратного донного рассеяния с «переменной» частотой заполнения импульса.
В зависимости от частоты излучения сигналов существует предельная глубина под килем, когда еще возможна работа по сигналам обратного донного рассеяния. При превышении предельной глубины, работа лага возможна по сигналам объемной реверберации, принимаемым с расстояний 10-50 м. В реальных условиях указанные значения глубин варьируют в зависимости от потерь на трассе распространения, интенсивностей обратного донного рассеяния и объемной реверберации. Переключение цифровой модели лага в необходимый режим работы может осуществляться процессором автоматически, т.е. в данном случае будет происходить адаптация к конкретным гидрологическим условиям. При поступлении от судовых средств навигации данных о текущих углах качек и вертикальной составляющей вектора скорости, выполняется компенсация этих дестабилизирующих факторов. Компенсация сводится к несложным для процессора расчетам по соотношениям:


где Vx, Vv - искомые горизонтальные составляющие вектора скорости;
Vx:i, Vv:i - измеренные лагом составляющие вектора скорости;
Ψ, θ - углы качек;
Vz - вертикальная составляющая вектора скорости.
Предлагаемый лазерный судовой измеритель скорости разработан на промышленно освоенной элементной базе средствах вычислительной техники, что исключает технические риски при его промышленной применимости.
Источники информации.
1. Б.С. Ринкявичюс. Лазерная диагностика потоков. МЭИ, 1990.
2. Применение дифракционных решеток в лазерной доплеровской анемометрии. Technisches Messen, 61, 1994 7/8, стр. 311-316.
3. Авторское свидетельство SU №1249463 А1, 07.08.1986.
4. Патент JP №1249463 А1, 07.08.1989.
5. Заявка JP №60093956 А, 25.05.1985.
6. Заявка US №2004036873 А1, 26.02.2004.
7. Лазерный доплеровский измеритель скорости для промышленности и транспорта/Ю.Д. Каминский и др. // Лазер-Информ. Информационный бюллетень лазерной ассоциации, №1-2 (592-593), январь 2017, с. 3-7.
8. Патент RU №2435166 С1, 27.11.2011.
Устройство относится к области морского приборостроения и предназначено для использования в качестве относительного и абсолютного лага, а также измерителя скорости течений для приповерхностных и глубоководных исследований преимущественно при малых глубинах под килем. Лазерный судовой измеритель скорости содержит передающий канал, включающий полупроводниковый модуль с дифракционно-оптическим делением лазерного пучка и содержащий полупроводниковый модуль, дифракционную решетку, первый объектив, пространственный фильтр, второй объектив, и приемный канал, включающий фокусирующий объектив, диафрагму, фотодиод и предварительный усилитель, подключенный к преобразователю доплеровского сигнала, вычислительное устройство, при этом приемный канал дополнительно содержит вторую диафрагму и второй фотодиод с предварительным усилителем, подключенным к второму преобразователю доплеровского сигнала, при этом выходы преобразователей доплеровского сигнала подключены к вычислительному устройству, передающий и приемный каналы размещены в герметичном корпусе, снабженном в нижнем основании корпуса защитным окном. Дополнительно лазерный судовой измеритель скорости содержит «n» передающих и приемных каналов, размещенных соответственно в «n» герметичных корпусах, установленных по обоим бортам судна соответственно в носовой, кормовой и центральной частях судна, при этом герметичные корпуса с передающими и приемными каналами также размещены попарно в вертикальной плоскости корпуса судна, при этом один герметичный корпус с передающим и приемным каналом размещен выше ватерлинии, а другой в днище судна в телескопическом устройстве, полупроводниковые модули, размещенные в герметичных корпусах, установленных выше ватерлинии, выполнены для функционирования в видимом диапазоне волн, а полупроводниковые модули, размещенные в герметичных корпусах, установленных в днище судна, выполнены в сине-зеленом диапазоне волн, в вычислительное устройство введен блок корреляционной обработки сигналов от «n» передающих и приемных каналов, вычислительное устройство своими соответствующими входами соединено также с выходами судовых датчиков измерения углов килевой и бортовой качек, вертикальных составляющих вектора скорости, в состав лазерного судового измерителя скорости введены блок классификации спектра принятых сигналов, соединенный своим входом с выходами передающих и приемных каналов, блок выбора режимов функционирования устройства, соединенный своим входом с выходом блока классификации спектра принятых сигналов, а своим выходом - с входом вычислительного устройства. 2 ил.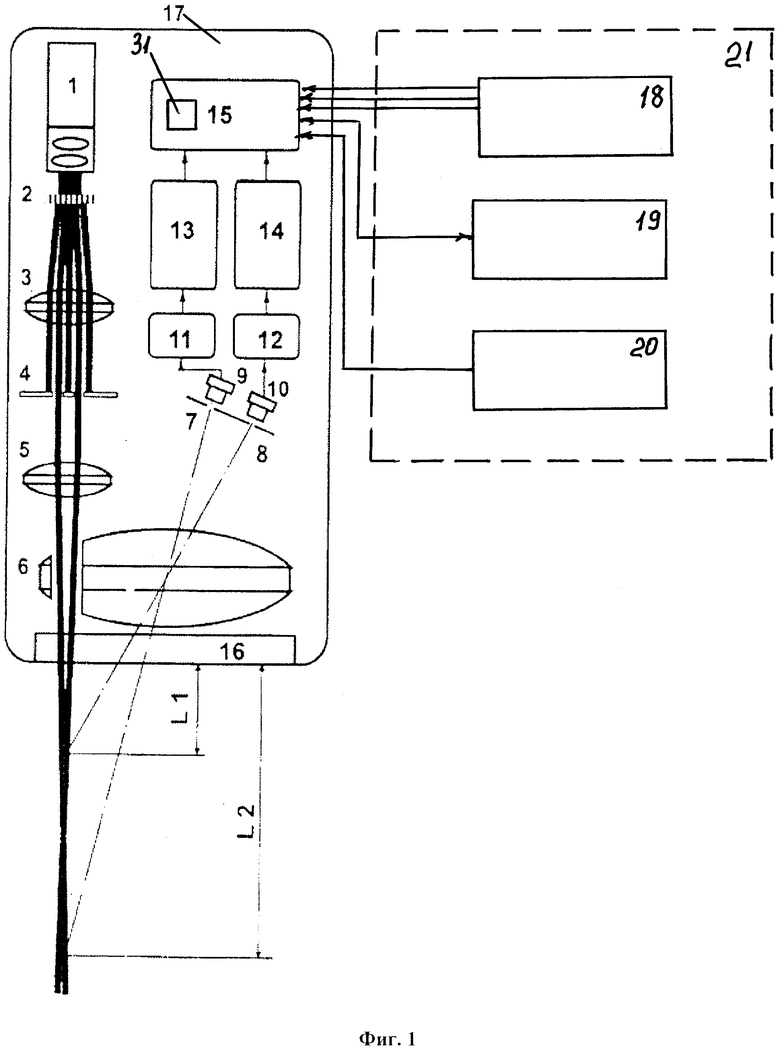
Лазерный судовой измеритель скорости, содержащий передающий канал, включающий полупроводниковый модуль с дифракционно-оптическим делением лазерного пучка и содержащий полупроводниковый модуль, дифракционную решетку, первый объектив, пространственный фильтр, второй объектив, и приемный канал, включающий фокусирующий объектив, диафрагму, фотодиод и предварительный усилитель, подключенный к преобразователю доплеровского сигнала, вычислительное устройство, при этом приемный канал дополнительно содержит вторую диафрагму и второй фотодиод с предварительным усилителем, подключенным к второму преобразователю доплеровского сигнала, при этом выходы преобразователей доплеровского сигнала подключены к вычислительному устройству, передающий и приемный каналы размещены в герметичном корпусе, снабженном в нижнем основании корпуса защитным окном, отличающийся тем, что лазерный судовой измеритель скорости содержит «n» передающих и приемных каналов, размещенных соответственно в «n» герметичных корпусах, установленных по обоим бортам судна соответственно в носовой, кормовой и центральной частях судна, при этом герметичные корпуса с передающими и приемными каналами также размещены попарно в вертикальной плоскости корпуса судна, при этом один герметичный корпус с передающим и приемным каналом размещен выше ватерлинии, а другой - в днище судна в телескопическом устройстве, полупроводниковые модули, размещенные в герметичных корпусах, установленных выше ватерлинии, выполнены для функционирования в видимом диапазоне волн, а полупроводниковые модули, размещенные в герметичных корпусах, установленных в днище судна, выполнены в сине-зеленом диапазоне волн, в вычислительное устройство введен блок корреляционной обработки сигналов от «n» передающих и приемных каналов, вычислительное устройство своими соответствующими входами соединено также с выходами судовых датчиков измерения углов килевой и бортовой качек, вертикальных составляющих вектора скорости, в состав лазерного судового измерителя скорости введены блок классификации спектра принятых сигналов, соединенный своим входом с выходами передающих и приемных каналов, блок выбора режимов функционирования устройства, соединенный своим входом с выходом блока классификации спектра принятых сигналов, а своим выходом - с входом вычислительного устройства.
| ЛАЗЕРНЫЙ ИЗМЕРИТЕЛЬ СКОРОСТИ ВОДНЫХ ПОТОКОВ | 2010 |
|
RU2435166C1 |
| А.В | |||
| Михеенко | |||
| Оптический пробой в толще воды под действием непрерывного лазерного излучения | |||
| Электронное научное издание "Ученые заметки ТОГУ", 2016, том 7, номер 4, стр | |||
| Катодное генераторное реле | 1921 |
|
SU797A1 |
| Raymond C.Smith and Karen S.Baker | |||
| Мяльно-трепальный станок для обработки тресты лубовых растений | 1922 |
|
SU200A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |

