Изобретение относится к судовым средствам измерения скорости, основанным на излучении электромагнитных волн и приеме отраженных волн от подстилающей поверхности (вода, суша, лед), преимущественно для судов ледового плавания.
Освоение морских месторождений углеводородов на шельфе морей Северного Ледовитого океана и их транспортировка посредством судов ледового плавания обуславливает необходимость повышения навигационной безопасности плавания в ледовых условиях.
Создание гидроакустических и индукционных измерителей скорости с не выступающими за обводы корпуса судна приемными устройствами позволило в целом решить проблему снабжения судов ледокольного типа надежными лагами (Судовые измерители скорости / Хребтов А.А., Кошкарев В.Н., Осюхин Б.А. и др. Л. Судостроение, 1978, с.47-71, с.118-158 [1]).
В последние годы был разработан и находит применение радиодоплеровский измеритель скорости, у которого приемные устройства размещаются на верхней палубе судна или его надстройке (Судовые измерители скорости / Хребтов А.А., Кошкарев В.Н., Осюхин Б.А. и др. Л. Судостроение, 1878, с.72-99 [1]. Оценка работы лагов на ледоколе / А.Г.Гузеев, Н.Н.Пирогов, В.В.Чернявец и др. // Судостроение, №1, 1981, с.30-31 [2])
Для выработки возможных рекомендаций по выбору состава измерителей скорости, устанавливаемых па судах ледокольного типа, на ледоколе «Капитан Сорокин» были проведены наблюдения за работой трех измерителей скорости - доплеровского гидроакустического лага (ДГЛ), разработанного французской фирмой «Томпсон», индукционного отечественного лага ИЭЛ-2 и радиодоплеровского измерителя скорости (РДИС) [1]. Первые два лага являлись штатными измерителями скорости, РДИС был установлен на время плавания в северных широтах. Наблюдения за работой лагов проходили как при плавании ледокола в сплоченных льдах, так и на чистой воде.
Принцип действия ДГЛ основан на определении скорости судна по доплеровским сдвигам частот акустических сигналов, излученных с борта судна, отраженных морским дном и принятых антенной системой лага. При глубинах, превышающих заданные рабочие глубины под килем, ДГЛ переходит в режим измерения скорости судна относительно удаленных от днища слоев воды (для лага фирмы «Томпсон» эта глубина составляет более 150 м).
Зависимость доплеровского сдвига частоты от скорости судна V описывается выражением: 
где fд - доплеровский сдвиг частоты; fо - частота излучаемых колебаний; С - скорость звука в воде; α - угол излучения между горизонтом, и направлением акустического сигнала.
Как видно из выражения (1), источниками погрешности ДГЛ могут быть следующие факторы: погрешность измерения средней частоты доплеровского спектра; неравномерность скорости распространения звука в морской воде; изменение углов наклона лучей антенной системы; наличие вертикальной составляющей скорости судна; изменение несущей частоты акустического излучения.
Значение погрешности измерения скорости ДГЛ фирмы «Томпсон» составляет 0,5% при скорости до 20 уз и 1% при скорости более 20 уз.
В основу работы индукционного лага ИЭЛ-2 положен закон электромагнитной индукции.
Как известно, явление электромагнитной индукции возникает в морской воде при ее перемещении относительно магнитного поля. При этом, если индукционный первичный преобразователь скорости (ИППС), имеющий электромагнит и измерительные электроды, жестко связан с движущимся судном, то, измерив напряжение, возникающее на электродах за счет наводимой в воде ЭДС, можно определить скорость перемещения магнитного поля относительно воды, т.е. подсчитать относительную скорость судна. Ее вектор в общем случае определяется индукционным лагом как

где u1, u2 - напряжение на электродах ИППС.
Источниками погрешности индукционных лагов являются;
погрешности ИППС, которые обусловлены собственной ЭДС электродов, влиянием циркуляционных токов, токов утечки и наводки. Наиболее ощутимо на ИППС, установленном на ледоколе «Капитан Сорокин», сказывалось влияние циркуляционных токов, так как при установке ИППС заподлицо с днищем судна измерения производятся в турбулентном слое, обладающем значительными градиентами скорости;
погрешности измерительной системы, суммарная величина которой зависит от изменения коэффициентов предварительного усилителя обратного преобразователя, от наличия порогов чувствительности, от действия паводок и дрейфа нуля;
погрешности, обусловленные влиянием внешней среды (качка, крен, дифферент, изменение электропроводности воды, обрастание корпуса судна, изменение его осадки). Влияние осадки, обрастания корпуса на величину погрешности скорости характерно для индукционных лагов с ИППС не выступающими за обводы корпуса судна.
(Величины погрешности измерения скорости лагом ИЭЛ-2 составляют ±0,1-0,2 уз).
Принцип действия РДИС основан на определении скорости судна по доплеровским сдвигам частот радиосигналов, излученных с борта судна, отраженных от поверхности моря и принятых антенной системой лага.
Скорость судна определяется РДИС в соответствии с зависимостью:

где с - скорость распространения света;
γ - угол между направлением движения судна и поверхностью моря (подстилающей поверхностью). Характерной особенностью использования РДИС является расположение антенн лага над поверхностью моря, что практически исключает применение импульсного режима излучения ввиду крайне малого времени распространения сигнала до поверхности моря и обратно, а также невозможность работы в режиме непрерывного излучения через раздельные приемные и передающие антенны. В связи с этим РДИС работают, как правило, в непрерывном режиме и имеют совмещенные приемопередающие устройства.
Точность показаний РДИС зависит от погрешностей: измерения доплеровской частоты (в общем случае ее значение лежит в пределах 0,1-0,3%); обусловленной свойствами поверхности моря (при большом волнении моря остаточные величины составляют 0,2-0,4% от измеряемой скорости); вызванной различием расчетного и фактического направлений лучей антенной системы; обусловленной движением поверхности моря под воздействием ветра и волнения, которая в общем случае составляет:
где ΔVx, ΔVy - продольная и поперечная составляющие скорости по лагу;
RΣ - коэффициент, характеризующий зависимость суммарной скорости движения поверхностной пленки моря от скорости ветра;
VB - скорость ветра;
θΣ - угол между диаметральной плоскостью судна и направлением движения поверхностной пленки.
Средняя квадратичная погрешность измерения скорости, например, РДИС «Саделек-Радио» (Франция) составляет 0,22 уз при V=22 уз, 1% при V>22 уз [1].
Анализ работы всех трех измерителей скорости показал [2], что в период плавания ледокола «Капитан Сорокин» на чистой воде все лаги работали безотказно. Переход же ледокола в условиях сплошного льда явился серьезной проверкой их технической пригодности к эксплуатации и особенно для индукционного и гидроакустического лагов, т, е. для тех измерителей, у которых приемные устройства размещены заподлицо с днищем судна. Так, приемное устройство ИЭЛ-2 под воздействием льда, попадавшего под днище ледокола, вдавливалось в клинкет. Это вызывало резкое изменение показаний скорости данного лага. Отмечены были сбои в показаниях скорости также и у ДГЛ. Радиодоплеровский лаг, приемное устройство которого было размещено на судовой надстройке, в сложной ледовой обстановке работал стабильно, как и в условиях плавания на чистой воде.
Проведенные наблюдения по оценке работы лагов позволяют сделать следующие выводы:
При плавании на чистой воде любой из трех лагов может обеспечить судоводителя информацией о скорости. Однако гидроакустический лаг при работе на глубинах, позволяющих производить измерение скорости относительно дна, наиболее перспективен. Использование же относительных лагов (ИЭЛ-2, РДИС), сопряжено с необходимостью учета гидрометеорологических факторов.
При плавании в условиях сплошного и сплоченного льда надежное измерение скорости может обеспечить радиодоплеровский лаг, приемное устройство которого не может быть повреждено льдами. С целью удобства счисления пути и наработки пройденного расстояния при маневрировании ледокола во льдах, индикатор пройденного расстояния лага нуждается в усовершенствовании с возможностью учета всех перемещений судна.
Надежное измерение скорости ледокола, как на чистой воде, так и во льдах, может быть обеспечено при наличии двух штатных лагов в сочетании: гидроакустический и радиодоплеровский, либо индукционный и радиодоплеровский, считая последний в обеих комплектациях основным измерителем скорости судна при плавании во льдах.
Известен также измеритель скорости (РДИС) для судов ледового плавания (Совершенствование доплеровских радиолагов, устанавливаемых на судах ледового плавания / Чернявец В.В., Перепелицын О.В., Харитонов Ю.П. и др. // Судостроение, №1, 1987, с.26-27 [3]), в котором для исключения погрешностей обусловленных гидрометеорологическими факторами при плавании на чистой воде, реализована задача учета влияний гидрометеорологических факторов на его работу, путем комплексирования РДИС с судовым измерителем ветра. При этом практически исключается такой недостаток РДИС, как возможное пропадание сигнала при его работе над водной поверхностью во время полного штиля, обусловленное тем, что отражение излучаемой энергии РДИС происходит по законам геометрической оптики (угол падения равен углу отражения) и в направлении на приемник отраженное излучение может отсутствовать (подобное явление снижает эксплуатационные характеристики РДИС).
При использовании информации от судового измерителя ветра можно исключить и еще один недостаток, обусловленный принципом работы РДИС от водной поверхности.
Как известно [1] в скорость, измеряемую РДИС, входит и скорость поверхностного ветрового течения. Погрешность при этом может достигать 0,5-1,5 уз. Она зависит от скорости и направления ветра. Для устранения этого недостатка в известном РДИС [3] выполняют преобразование параметров истинного ветра в соответствии с алгоритмами (Исследование поверхностного ветрового течения в море / Перепелицын О.В., Чернявец В.В. // Известия Академии наук СССР, сер.: Физика атмосферы и океана, 1982, №2, с.217-220 [4]) посредством преобразователя входы которого соединены с судовым измерителе ветра и судовым курсоуказателем, а выходы соединены с входами вычислительного устройства.
Однако, при плавании во льдах, часть сигналов, при облучении электромагнитными волнами подстилающей поверхности, отражается от льда, что вносит дополнительную погрешность при измерении скорости.
Задачей предлагаемого технического решения является повышение точности измерения скорости посредством радиодоплеровской измерительной системы судов ледового плавания.
Поставленная задача решается за счет того, что в измеритель скорости для судов ледового плавания, выполненный в виде радиодоплеровского измерителя скорости, и включающий антенное устройство, состоящее из пары двухлучевых антенн, расположенных по бортам судна с образованием четырех лучевой антенной системы, приемопередатчик, устройство измерения доплеровской частоты, вычислительное устройство, индикатор, соединенные последовательно и преобразователь, который своими входами-выходами, соединен с входами-выходами вычислительного устройства и еще двумя входами соединен с выходами судового измерителя ветра и судовым курсоуказателем, соответственно, дополнительно введено корреляционное устройство, по каждому борту судна установлены, по крайней мере, еще по два антенных устройства, корреляционное устройство своим входом соединено с выходом приемопередатчика, а своим выходом соединено с входом вычислительного устройства.
Сущность изобретения поясняется чертежами (фиг.1, 2).
Фиг.1. Блок-схема измерителя скорости. Блок-схема включает антенное устройство 1, приемопередатчик 2, устройство измерения доплеровской частоты 3, вычислительное устройство 4, индикатор 5, преобразователь 6, корреляционное устройство 7.
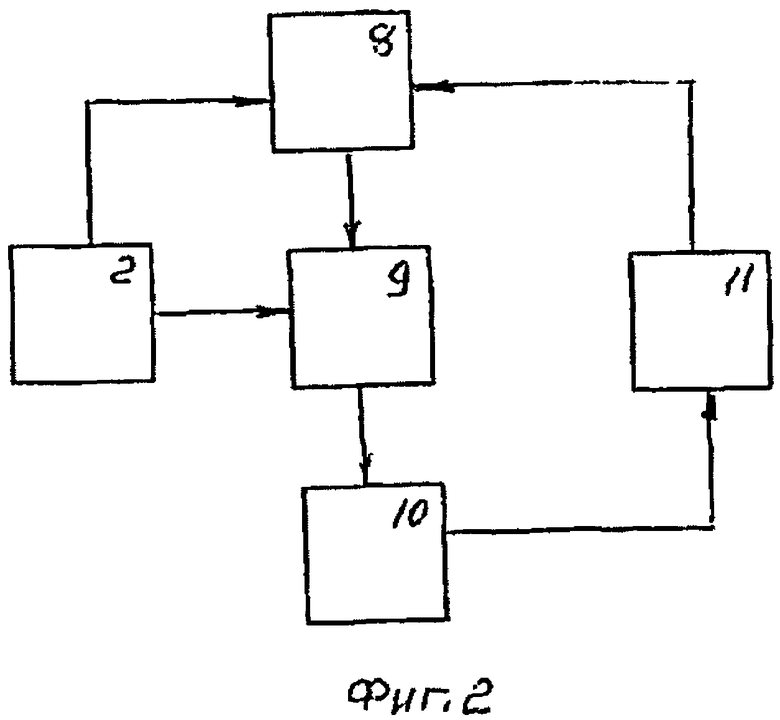
Фиг.2. Блок-схема корреляционного устройства. Корреляционное устройство 7 представляет собой коррелятор, который состоит из блока регулируемой задержки 8, множительного устройства 9, интегратора 10, системы слежения 11.
Пример промышленной реализации предлагаемого устройства.
На судне ледового плавания устанавливают измеритель скорости, выполненный в виде радиодоплеровского измерителя скорости, который включает антенное устройство, состоящее из пары двухлучевых антенн, расположенных по бортам судна с образованием четырех лучевой антенной системы, приемопередатчик, устройство измерения доплеровской частоты, вычислительное устройство, индикатор, соединенные последовательно и преобразователь, который своими входами-выходами, соединен с входами-выходами вычислительного устройства и еще двумя входами соединен с выходами судового измерителя ветра и судовым курсоуказателем, соответственно, корреляционное устройство. При этом по каждому борту судна установлены, по крайней мере, еще по два антенных устройства, а корреляционное устройство своим входом соединено с выходом приемопередатчика, а своим выходом соединено с входом вычислительного устройства.
Принцип действия РДИС основан на определении скорости судна по доплеровским сдвигам частот радиосигналов, излученных с бортов судна, отраженных от подстилающей поверхности и принятых антенным устройством 1 лага. Отраженный сигнал представляет собой шумоподобный сигнал со сравнительно узким спектром. Для определения скорости судна измеряют среднюю доплеровскую частоту в устройстве измерения доплеровской частоты 3.
Антенное устройство 1 состоит из пары двухлучевых антенн, устанавливаемых по разным бортам судна и образующих четырех лучевую систему. Каждая антенна выполнена в виде волноводно-щелевой антенны, представляющей собой комбинацию симметричных многощелевых волноводов, позволяющих формировать несколько лучей с одного раскрыва.
Приемопередатчик 2 состоит из полупроводникового источника СВЧ-колебаний, ферритовых циркуляторов для разделения каналов передачи и приема сигналов, супергетеродинного приемника с двойным преобразованием частоты принятых сигналов в доплеровскую частоту. Принимаемый сигнал вначале с помощью смесителя смещается в область промежуточных частот с помощью гетеродинирующего сигнала, частота которого отличается от частоты излучения на величину промежуточной частоты. Низкочастотные шумы отфильтровываются с помощью усилителя промежуточной частоты. После усиления преобразованный к промежуточной частоте сигнал подвергается вторичному преобразованию с помощью гетеродинирующего сигнала промежуточной частотой. При этом сигнал доплеровской частоты на выходе второго смесителя свободен от низкочастотных шумов. Для увеличения развязки применен режим с частотной модуляцией. При выделении доплеровского сдвига используется энергия одной боковой составляющей спектра отраженного модулированного сигнала (третья гармоника). Прибегая к режиму с частотной модуляцией, удается в значительной мере ослабить прямые сигналы, отраженные от близлежащих элементов корпуса судна и конструктивных элементов РДИС, для которых время распространения до отражающего элемента и обратно крайне мало.
Устройство для измерения доплеровской частоты 3 построено по принципу слежения за спектром частот с частотной автоподстройкой частоты и представляет собой следящую систему состоящую из смесителя, узкополосного фильтра, частотного дискриминатора, схемы управления и управляемого гетеродина.
Вычислительное устройство 4 построено на базе микропроцессора DSP-процессора, работающего под управлением встраиваемой операционной системы «UCLinux» с блоком управления, выполненным на основе микропроцессора со специальным программным обеспечением, позволяющим осуществлять ввод/вывод информации и преобразование сигналов от нескольких навигационных датчиков (курсоуказателя, судового измерителя ветра, приемоиндикатора спутниковой навигационной системы типа GPS), например микропроцессоров семейства AVR фирмы АТМЕС.
Преобразователь 6 выполнен на основе микропроцессора DSP-процессора, работающего под управлением встраиваемой операционной системы «UCLinux» и предназначен для выработки корректирующих сигналов (поправок) на изменение свойство подстилающей поверхности при плавании на чистой от льда водной поверхности.
Аналогом корреляционного устройства 7 является дискретное корреляционное устройство, осуществляющие слежение за максимумом взаимно-корреляционной функции двух сигналов (Козубовский С.Ф. Корреляционно-экстремальные системы. Киев. Наукова думка, 1973).
Индикатор 5 предназначен для индикации показаний о путевой скорости и ее составляющих, угле дрейфа, пройденном расстоянии, путевом угле на жидкокристаллическом мониторе.
Антенное устройство 1, питание которого осуществляется генератором приемопередатчика 2, обеспечивает излучение и прием от подстилающей поверхности электромагнитных колебания по каждому лучу. Принятые колебания смешиваются в приемнике приемопередатчика 2 с колебаниями генератора. Выделенные биения разностной частоты после усиления и преобразования подаются на устройство измерения доплеровской частоты 3. С выхода устройства измерения доплеровской частоты 3 сигналы, пропорциональные средним доплеровским частотам, поступают в виде аналоговых величин или в виде импульсных последовательностей в вычислительное устройство 4, реализующие математические зависимости определения составляющих скорости (продольной и поперечной), модуля вектора скорости и угла дрейфа (Судовые измерители скорости / Хребтов А.А., Кошкарев В.Н., Осюхин Б.А. и др. Л. Судостроение, 1978, с.80-81 [1]). Выходные сигналы вычислительного устройства, пропорциональный составляющим вектора скорости в судовой системе координат или путевой скорости и углу дрейфа поступают на индикатор 5 и к внешним потребителям.
При плавании в ледовых условиях,
после обработки в приемопередатчике 2 сигналы поступают на входы корреляционного устройства 7, осуществляющего вычисление взаимно-корреляционной функции и слежение за ее максимумом. Система слежения 11, подключенная к выходу интегратора 10, регулирует введенную временную задержку, поддерживая максимальное значение корреляционной функции. При этом по значению введенной задержки τз=τт определяется скорость судна.
Аналогом корреляционного устройства является дискретное корреляционное устройство, осуществляющие слежение за максимумом взаимно-корреляционной функции двух сигналов (Козубовский С.Ф. Корреляционно-экстремальные системы. Киев. Наукова думка, 1973).
Непрерывные входные сигналы в этом устройстве заменяются знакопеременными сигналами постоянной амплитуды, знаки которых соответствуют знакам входных сигналов. Эта операция называется клиппированием и выполняется с помощью усилителей-ограничителей Далее осуществляется построение знаковой взаимно-корреляционной функции, линейно связанной с вероятностью совпадения знаков входных сигналов.
Знаковая взаимно-корреляционная функция связана с обычной нормированной взаимно-корреляционной функцией двух величин, имеющих нормальное совместное распределение.
Установленные на судне разнесенные вдоль диаметральной плоскости по обоим бортам судна антенные устройства 1 движутся одна за другой по одной и той же траектории. При этом измерение скорости сводится к нахождению временного сдвига сигналов принятых разнесенными антенными устройствами 1 вдоль бортов. Нахождение этого сдвига производится путем корреляционной обработки принятых сигналов. Для этой цели в тракт сигнала носовой антенны антенного устройства 1 вводится переменная временная задержка и производится вычисление взаимно-корреляционной функции огибающих сигналов разнесенных вдоль бортов антенн и отслеживается ее максимальное значение на двух базах.
Слежение за максимумом взаимно-корреляционной функции осуществляется с помощью дифференциальной системы слежения 11 сигналом рассогласования которой является разность двух значений взаимно-корреляционной функции, соответствующих задержкам:
τз1=τз-Δτ и
τз2=τз+Δτ.
Клиппированные сигналы подаются на входы блока регулируемой задержки 8, куда и подается сигнал с носовой приемопередающей антенны антенного устройства 1, где он квантуется с частотой продвигающих импульсов fn=1/Tn и задерживается во времени.
По значениям измеренных задержек и известным расстояниям между антеннами (Хо) в вычислительном устройстве 4 определяют путевую скорость судна V=Хо/τз.
Технический результат, заключающийся в повышение точности измерения скорости посредством радиодоплеровской измерительной системы судов ледового плавания обеспечивается тем, что дополнительно введено корреляционное устройство, по каждому борту судна установлены, по крайней мере, еще по два антенных устройства, корреляционное устройство своим входом соединено с выходом приемопередатчика, а своим выходом соединено с входом вычислительного устройства.
Источники информации.
1. Судовые измерители скорости / Хребтов А.А., Кошкарев В.Н., Осюхин Б.А. и др. Л. Судостроение, 1978, с.47-71, с.118-158.
2. Оценка работы лагов на ледоколе / А.Г.Гузеев, Н.И.Пирогов, В.В.Чернявец и др. // Судостроение, №1, 1981, с.30-31.
3. Совершенствование доплеровских радиолагов, устанавливаемых на судах ледового плавания / Чернявец В.В., Перепелицын О.В., Харитонов Ю.П. и др. // Судостроение, №1, 1987, с.26-27.
4. Исследование поверхностного ветрового течения в море / Перепелицын О.В., Чернявец В.В. // Известия Академии наук СССР, сер.: Физика атмосферы и океана, 1982, №2, с.217-220.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ДЛЯ СУДОВ ЛЕДОВОГО ПЛАВАНИЯ | 2011 |
|
RU2487365C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОЙ СКОРОСТИ СУДНА ПО ИЗМЕРЕНИЯМ ДЛИНЫ ПРОБЕГА СУДНА НА ГАЛСЕ ПО ФИКСИРОВАННОМУ СОЗВЕЗДИЮ КОСМИЧЕСКИХ АППАРАТОВ СРЕДНЕОРБИТНОЙ СПУТНИКОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 2013 |
|
RU2550299C2 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2012 |
|
RU2489731C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ | 2011 |
|
RU2492505C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С БОРТА ДВИЖУЩЕГОСЯ СУДНА | 2014 |
|
RU2563314C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2008 |
|
RU2384861C1 |
| СПОСОБ ИЗМЕРЕНИЯ СВЕРХМАЛОЙ ВЫСОТЫ ПОЛЕТА САМОЛЕТА ПРЕИМУЩЕСТВЕННО ГИДРОСАМОЛЕТА, НАД ВОДНОЙ ПОВЕРХНОСТЬЮ И ПАРАМЕТРОВ МОРСКОГО ВОЛНЕНИЯ | 2014 |
|
RU2557999C1 |
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2467914C1 |
| ПОДВИЖНЫЙ МОРСКОЙ АППАРАТ ДЛЯ ПОДВОДНЫХ ИССЛЕДОВАНИЙ | 2011 |
|
RU2478059C1 |
Использование: изобретение относится к судовым средствам измерения скорости, основанным на излучении электромагнитных волн и приеме отраженных волн от подстилающей поверхности (вода, суша, лед), преимущественно для судов ледового плавания. Сущность: измеритель скорости для судов ледового плавания выполнен в виде радиодоплеровского измерителя скорости и включает антенное устройство, состоящее из пары двухлучевых антенн, расположенных по бортам судна с образованием четырехлучевой антенной системы, приемопередатчик, устройство измерения доплеровской частоты, вычислительное устройство, индикатор, соединенные последовательно, и преобразователь, который своими входами-выходами соединен с входами-выходами вычислительного устройства и еще двумя входами соединен с выходами судового измерителя ветра и судовым курсоуказателем, соответственно. При этом в измеритель скорости дополнительно введено корреляционное устройство, по каждому борту судна установлены, по крайней мере, еще по два антенных устройства, корреляционное устройство своим входом соединено с выходом приемопередатчика, а своим выходом соединено с входом вычислительного устройства. Технический результат: повышение точности измерения скорости посредством радиодоплеровской измерительной системы судов ледового плавания. 2 ил.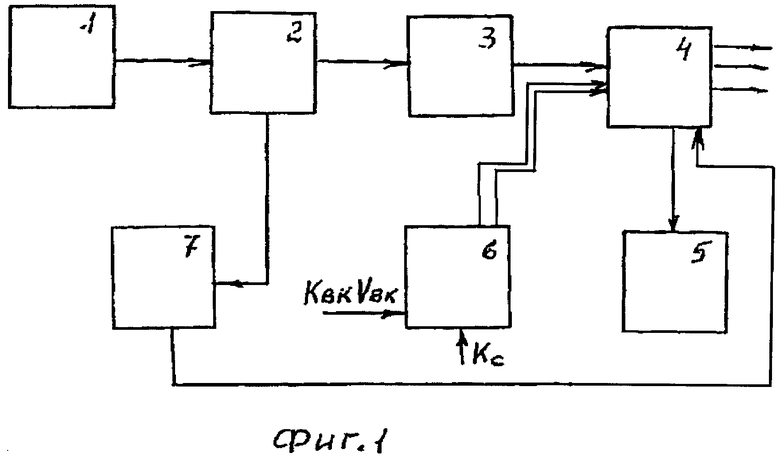
Измеритель скорости для судов ледового плавания, выполненный в виде радиодоплеровского измерителя скорости и включающий антенное устройство, состоящее из пары двухлучевых антенн, расположенных по бортам судна с образованием четырехлучевой антенной системы, приемопередатчик, устройство измерения доплеровской частоты, вычислительное устройство, индикатор, соединенные последовательно, и преобразователь, который своими входами-выходами соединен с входами-выходами вычислительного устройства и еще двумя входами соединен с выходами судового измерителя ветра и судовым курсоуказателем соответственно, отличающийся тем, что дополнительно введено корреляционное устройство, по каждому борту судна установлены, по крайней мере, еще по два антенных устройства, корреляционное устройство своим входом соединено с выходом приемопередатчика, а своим выходом соединено с входом вычислительного устройства.
| Устройство для срезания веток с деревьев | 1957 |
|
SU111633A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОЙ СКОРОСТИ СУДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2263329C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ КОРАБЛЯ ОТНОСИТЕЛЬНО ДНА МОРЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1977 |
|
SU1840287A1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ | 1994 |
|
RU2080620C1 |
| GB 1487701 A, 05.10.1977. | |||

