Устройство относится к области морского приборостроения и предназначено для использования в качестве относительного и абсолютного лага, а также измерителя скорости течений для приповерхностных и глубоководных исследований. Известны лазерные доплеровские измерители скорости с использованием призменных делителей лазерного пучка (Б.С. Ринкявичюс. Лазерная диагностика потоков. МЭИ, 1990 [1]). Их недостатком является чувствительность к разъюстировке призменного делителя или лазера, значительное влияние загрязнения защитного оптического окна, возможность использования только одномодовых лазеров с системой температурной стабилизации. Известен также лазерный доплеровский измеритель скорости («Применение дифракционных решеток в лазерной доплеровской анемометрии. Technisches Messen, 61.1994 7/8, стр. 311-316 [2]), содержащий передающий канал с дифракционно-оптическим делением лазерного пучка и приемный канал, включающий фокусирующий объектив, диафрагму, фотодиод и предварительный усилитель.
Недостатком рассмотренного лазерного доплеровского измерителя скорости является большая погрешность измерения скорости, обусловленная наличием пограничного слоя (слоя воды, непосредственно прилегающего к поверхности обтекаемого тела), что ограничивает возможность использования лазерного измерителя в качестве относительного лага и измерителя скорости течения. Реально толщина пограничного слоя может достигать 500-1000 мм в зависимости от размера судна, с которого осуществляется измерение, а стандартное рабочее расстояние дифракционных лазерных доплеровских измерителей скорости 100-200 мм.
Увеличение рабочего расстояния приводит к увеличению габаритов лазерного датчика и усложнению конструкции, а также к значительному увеличению потерь мощности лазерного излучения в воде, что практически ограничивает реализацию дифракционного лазерного доплеровского измерителя скорости с рабочим расстоянием более 200-300 мм. Известные также аналогичные устройства (авторское свидетельство SU №1249463 А1, 07.08.1986 [3], патент JP №1249463 А1, 07.08.1989 [4], заявка JP №60093956 А, 25.05.1985 [5], заявка US №2004036873 А1, 26.02.2004 [6], Лазерный доплеровский измеритель скорости для промышленности и транспорта / Ю.Д. Каминский и др. // Лазер-Информ. Информационный бюллетень лазерной ассоциации, №1-2 (592-593), январь 2017, с. 3-7 [7]), также имеют погрешность неприемлемую при измерении скорости судов. Задачей, на решение которой направлено также известное устройство (патент RU №2435166 С1, 27.11.2011 [8]), является создание лазерного доплеровского измерителя скорости, обеспечивающего минимизацию погрешности измерения скорости, обусловленную пограничным слоем, что решается за счет того, что лазерный измеритель скорости водных потоков, содержащий передающий канал с дифракционно-оптическим делением лазерного пучка и приемный канал, включающий фокусирующий объектив, диафрагму, фотодиод и предварительный усилитель, подключенный к преобразователю доплеровского сигнала, содержит вычислительное устройство, а в приемный канал дополнительно введены вторая диафрагма и второй фотодиод с предварительным усилителем, подключенным ко второму преобразователю доплеровского сигнала, при этом выходы преобразователей доплеровского сигнала подключены к вычислительному устройству.
При этом устройство состоит из полупроводникового лазерного модуля, дифракционной решетки, объектива, пространственного фильтра, объектива, образующих передающий канал с дифракционно-оптическим делением лазерного пучка. Приемный канал содержит фокусирующий объектив, две диафрагмы, два фотодиода, два предварительных усилителя, два преобразователя доплеровского сигнала. Выходы преобразователей подключены к вычислительному устройству. Конструктивно все элементы размещены в герметичном корпусе с защитным окном.
Известное устройство [8] работает следующим образом: световой пучок лазерного модуля падает на дифракционную решетку, на выходе которой в результате дифракции и интерференции в дальней зоне получается семейство порядков дифракции. После прохождения телецентрической системы (объективы, пространственный фильтр) остаются только ± первые порядки дифракции, которые, пересекаясь в воде, образуют протяженную пространственную интерференционную картину (решетку). Рассеянное оптическими неоднородностями при пересечении решетки лазерное излучение фокусируется объективом через диафрагмы на фотодиодах, преобразующих это излучение в доплеровские сигналы, которые усиливаются в предварительных усилителях и в преобразователях доплеровского сигнала преобразуются в значения скорости на расстоянии и «l1» и «l2» - «ul1» и ul2». В вычислителе определяется значение скорости "u0" на основном участке потока вне пограничного слоя путем решения двух уравнений с двумя неизвестными «u0» и «δ»:
где u(l1) и u(l2) - измеренные значения скорости на расстоянии l1 и l2 от выходного окна измерителя,
δ - толщина пограничного слоя,
u0 - вычисленное значение скорости с учетом толщины пограничного слоя (на расстоянии «δ» от днища судна в основном участке потока).
Применение известного устройства [8] позволяет минимизировать погрешность измерения скорости, определяемую толщиной пограничного слоя, и в процессе эксплуатации в значительной степени сократить достаточно трудоемкие периодические испытания в стационарных условиях, когда известна толщина пограничного слоя. Однако измерение скорости судна в реальных условиях плавания с последующим использованием измеренных значений скорости при решении навигационных задач или задач по управлению судна в сложных навигационных условиях с обеспечением требований к навигационной безопасности судовождения практически не выполнимо, особенно для крупнотоннажных судов и подводных аппаратов при малых глубинах под килем. Задачей предлагаемого технического решения является расширение функциональных возможностей лазерного судового измерителя скорости за счет уменьшения негативных обстоятельств, влияющих на точность измерения скорости при его использовании на судах различного назначения.
Поставленная задача достигается за счет того, что в лазерном судовом измерителе скорости, содержащем передающий канал, включающий полупроводниковый модуль с дифракционно-оптическим делением лазерного пучка и содержащий полупроводниковый модуль, дифракционную решетку, первый объектив, пространственный фильтр, второй объектив, и приемный канал, включающий фокусирующий объектив, диафрагму, фотодиод и предварительный усилитель, подключенный к преобразователю доплеровского сигнала, вычислительное устройство, при этом приемный канал дополнительно содержит вторую диафрагму и второй фотодиод с предварительным усилителем, подключенным к второму преобразователю доплеровского сигнала, при этом выходы преобразователей доплеровского сигнала подключены к вычислительному устройству, передающий и приемный каналы размещены в герметичном корпусе, снабженным в нижнем основании корпуса защитным окном, приемный канал дополнительно содержит третью, четвертую и пятую диафрагму и третий, четвертый и пятый фотодиоды с предварительными усилителями, подключенными к третьему, четвертому и пятому преобразователям доплеровского сигнала, при этом выходы третьего, четвертого и пятого преобразователей доплеровского сигнала подключены к вычислительному устройству, дополнительно введены опорный фотоприемник, формирующий «старт»-импульс для отсчета времени задержки между зондирующими приемным импульсами, устройство отвода оптической энергии лазерного передатчика в опорный приемник и контрольный датчик направления излучения, размещенный в кардановом подвесе, связанным с бортовой инерциальной навигационной системой.
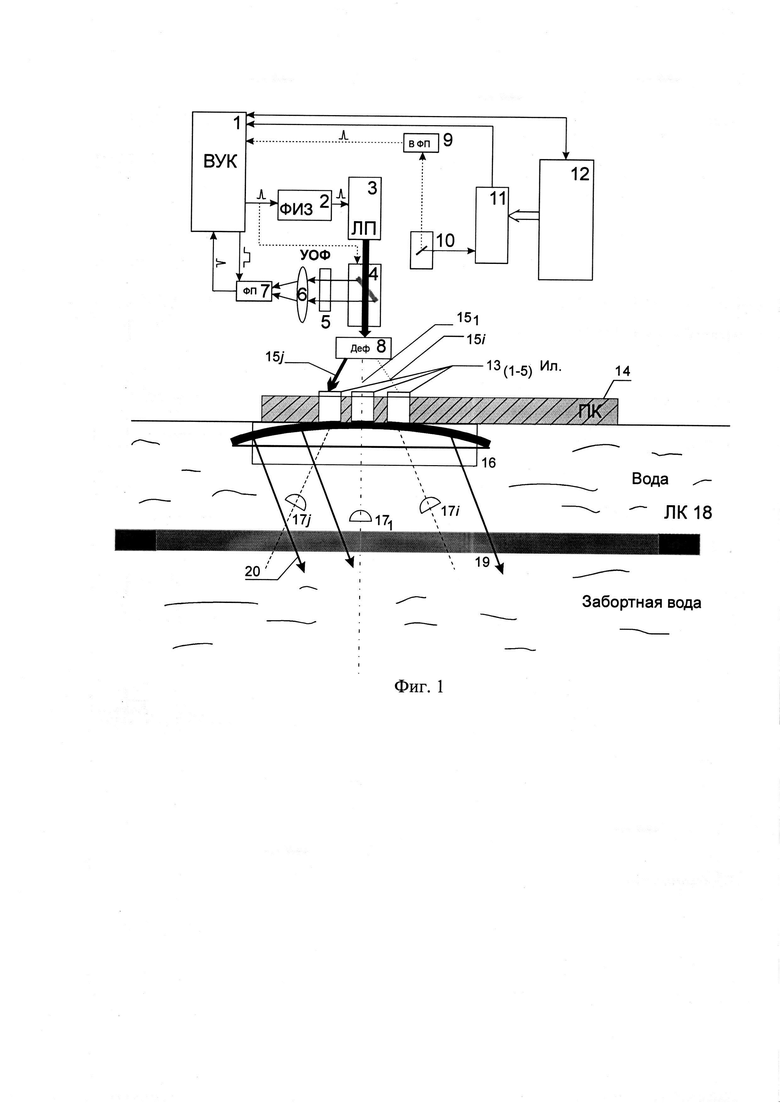
Сущность предлагаемого устройства поясняется чертежами (фиг. 1, 2).
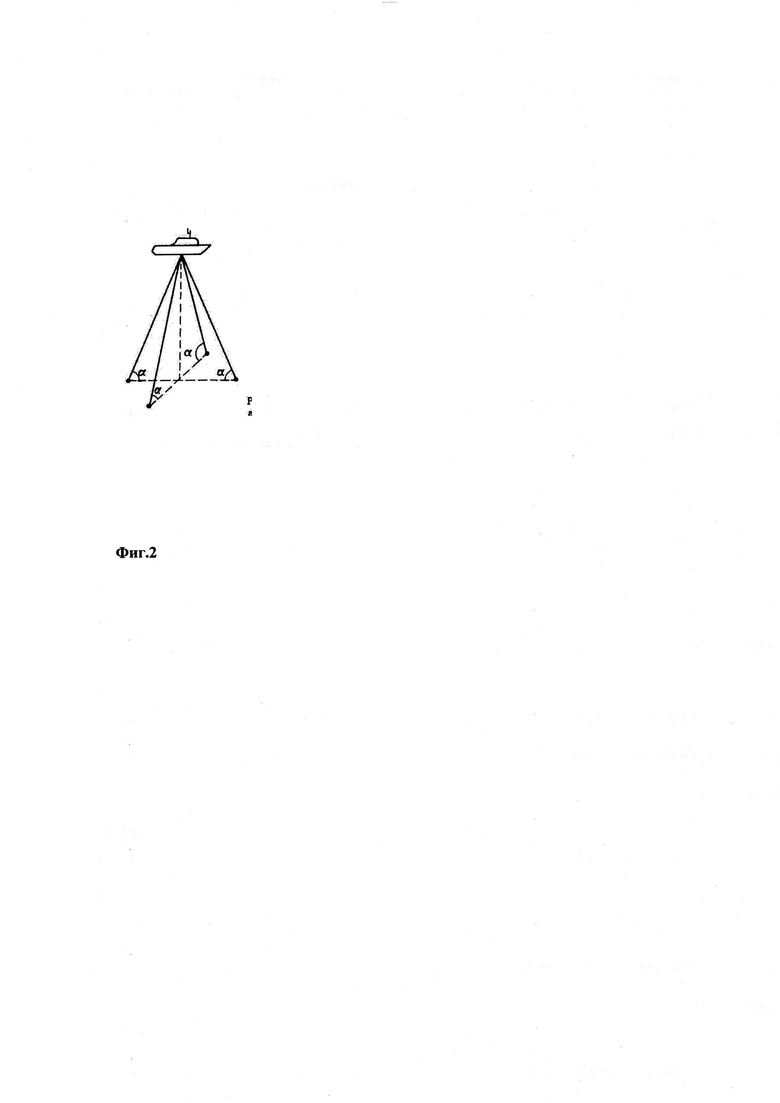
Фиг. 1. Блок-схема устройства.
Позициями на фиг. 1 обозначены:
1 - вычислительно-управляющий комплекс (ВУК), основные функции которого:
- формирование внутренне шкалы времени;
- формирование импульсов запуска лазерного передатчика;
- формирование строба для включения фотоприемного устройства ФП с задержкой относительно импульса запуска τз=2(Zmin/св) и длительностью
Δτс=2(Zmax-Zmin)/св,
где Zmax, Zmin - априори известные значения измеряемых глубин в данном сеансе;
св - скорость света в воде;
- формирование команды на включение соответствующего измерительного канала (направления лазерного луча для дефлектора Деф;
- измерение временных интервалов, вычисление глубины под килем, скорости, внесение поправок на основе данных об отклонениях лучей (см. ниже) и т.п.;
- выдача результатов сеанса внутри объектовым (судовым) потребителям;
2 - формирователь импульсов запуска (ФИЗ) лазерного передатчика 3;
3 - лазерный передатчик (ЛП);
4 - оптический переключатель «прием-передача» (в простейшем случае - неподвижное зеркало с небольшим отверстием для пропускания излучения передатчика малого поперечного сечения. В общем случае - быстродействующее зеркало (оптический затвор), которое по команде импульса запуска от ВУК 1 занимает положение для пропускания излучения передатчика, а затем - для отклонения на приемник отраженного от дна излучения);
5 - узкополосный оптический (интерференционный) фильтр (УОФ);
6 - согласующая оптическая система (согласует принимаемый пучок лазерных лучей с входным зрачком фотоприемника 7);
7 - импульсный фотоприемник (ФП);
8 - дискретный дефлектор оптического излучения (по командам ВУК синхронно с подачей импульсов запуска передатчика направляет излучение по одной из N осей (N - число лучей, в данном случае N=5) оптической системы;
9 - опорный фотоприемник, формирует «старт»-импульс для отсчета времени задержки между зондирующими приемным импульсами (эту задачу можно решать без опорного приемника, например, с помощью основного (измерительного) фотоприемника 7;
10 - устройство отвода оптической энергии лазерного передатчика в опорный фотоприемник 9 и - контрольный датчик направления излучения 11;
11 - контрольный датчик направления излучения представляет собой судовой пеленгатор (координатно-чувствительный приемник). Обеспечивает контроль отклонения мощного лазера передатчика 3 от расчетной оптической оси. Это отклонение может достигать от импульса к импульсу долей млрад (до одной трети ширины диаграммы излучения мощного лазера).
При размещении устройства 11 в кардановом подвесе, связанным с бортовой инерциальной навигационной системой (гировертикалью), с датчиков карданового подвеса можно снимать отклонение главной оптической оси (151) от вертикали места. Отклонения остальных осей и соответствующие поправки к измерениям наклонных глубин определяются из простых тригонометрических соотношений.
12 - инерциальная навигационная система (гировертикаль);
131-135 - иллюминаторы соответствующих измерительных каналов в прочном корпусе ПА (для наглядности три иллюминатора нарисованы в плоскости рисунка);
14 - прочный корпус (ПК). Для простоты рисунка кривизна прочного и легкого корпусов не учитывается;
151 - главная (вертикальная) ось оптической системы;
152-154 - оптические оси разнесенных лучей;
16 - главное зеркало оптической системы Кассегрена (эффективный диаметр от 300 до 500 мм);
171-175 - вторичные зеркала оптической системы;
18 - легкий корпус (ЛК);
19 - прозрачный обтекатель (иллюминатор) легкого корпуса. В случае неплоского иллюминатора, искажения, вносимые в оптические тракты за счет его кривизны, могут быть устранены, например, с помощью внесения изменений в конструкцию вторичных зеркал системы Кассегрена;
20j - направление излучения (приема) j-го канала (луча).
Фиг. 2. - Диаметрально - траверзная схема расположения антенных лучей.
Предлагаемое техническое решение основано на следующих выполненных исследований. Расчет чувствительности лазерной системы, как правило, связан с проведением сложного исследования, включающего решение задачи проверки гипотез в интересах расчета основных характеристик обнаружения (вероятности правильного обнаружения и ложной тревоги), расчета и измерения энергии фоновых засветок при заданных значениях поля зрения приемника и длительности строба, анализ и экспериментальные измерения собственных шумов аппаратуры и т.п.
В предлагаемом техническом решении применен упрощенный метод расчета энергетических характеристик лазерного лага для установки на ПА. В известных бортовых и наземных системах лазерной локации с энергопотреблением не более 1-2 кВт и массой не более 20-150 кГ, которые могут быть использованы в качестве лазерного лага для ПА, соотношение излучаемой и принимаемой энергии не превышает 1018, т.е.
(Еизл/Епр=(τизл⋅Ризл)/(τизл⋅Ризл)=(1014-1018).
При упрощенном методе расчета принимаются следующие предположения:
- расходимость зондирующего сигнала не превышает десятков угловых минут (в этом случае при Z≤1000 м можно считать, что снижение энергии сигнала из-за рассеяния учитывается в бугеровском показателе ослабления ε);
- вертикальное распределение показателя ослабления принимается однородным;
- дно моря (водоросли (при h<150 м), песок, валуны, ил, глина и т.п.) считается диффузноотражающим, без блестящих точек (от валунов, бетона, металлического мусора) и без придонного замутнения, например, от воздействия на ил движения лодки, подводных взрывов и т.п.).
При этих предположениях оценка совокупной энергии элементарных излучателей (отражателей) на площади S1 составит:
ES1=ηп⋅Еизл⋅ρ⋅е-εz,
где: ρ - средний спектральный коэффициент отражения дна;
Еизл - энергия излученного импульса;
ε - показатель ослабления в воде;
ηп⋅ - коэффициент пропускания оптического устройства передатчика.
Можно считать, что излучение источника S1 равномерно в пределах полусферы. В предположении, что вся излучающая площадь Si находится в поле зрения приемного объектива на ПЛ, энергия отраженного излучения составит:
Евх=(ES1⋅Soб/2π⋅Z2)⋅e-εz.
где: Soб - эффективная площадь приемного объектива (зеркала),
ES1 - совокупная энергия элементарных излучателей на площади S1.
Предельная энергия, которую можно использовать для обнаружения сигнала, составит:

где: Zm - максимальная дальность: Zm=Z(ε; ρ).
ηоб - коэффициент пропускания света приемной оптической системой (для системы с узкополосным оптическим фильтром η≤0,7);
ηФП - квантовая эффективность фотоприемника (для японского ФЭУ Н 7422 40 ηФП≈40%; для Si ФЭУ ФГУП НПП «Пульсар» ηФП=38-39% в диапазоне длин волн Δλ=0,5-0,55 мкм);
Soб - эффективная площадь приемного объектива (или зеркала).
Эксперименты по батиметрии показали, что η (λ=0,53 мкм) примерно одинаков для темно-зеленых водорослей и белого песка (см., например, - Прикладная оптика океана / Труды Института океанологии им. П.П. Ширшова АН СССР//М. «Наука» 1983. 235), поэтому для оценки энергетических характеристик лазерного импульсного локатора можно считать ρ=(0,3-0,45).
Для расчета предельной дальности Zm можно принять следующие предельные значения, реализуемые при современном уровне техники:
Еизл/Епр=1018; Soб≈0,2 м2; ρ⋅ηп⋅ηоб⋅ηФП=0,38⋅0,9⋅0,7⋅0,35≈8⋅10-2 (или ≈84⋅10-3)
Подставляя эти значения в соотношение (2.3.1) и выполняя очевидные преобразования, получим:

В экспериментах по лазерной батиметрии для  части океанских вод ε (λ=0,53 мкм)=0,06-0,09 м-1. С ростом глубины эта величина уменьшалась до 0,025 м-1 (см. книгу «Прикладная оптика…»).
части океанских вод ε (λ=0,53 мкм)=0,06-0,09 м-1. С ростом глубины эта величина уменьшалась до 0,025 м-1 (см. книгу «Прикладная оптика…»).
Для поверхностных вод большинства морей и океанов значения прозрачности воды определяются погружением на предельную глубину (Zg) до пропадания видимости диска, называемого в западной литературе именем патера Секки (на самом деле, этот способ визуального наблюдения прозрачности морской воды изначально был придуман русским мореплавателем Отто Евстафьевичем Коцебу еще в первой половине XIX века). В настоящее время практически для всех морей и океанов выполнены измерения с помощью стандартного белого диска диаметром 30 см. Эти измерения можно использовать для определения ε в водных поверхностях при многих океанографических и гидрографических исследований.
В зеленом диапазоне волн используют расчетное соотношение, соответствующее доверительному интервалу 95%:
ε(Zg)=3,35/Zg-0,002. (См. «Разработка лазерной космической навигационной системы/НТО по НИЭР «Полюс-3», часть III: Военно-технический эксперимент // ФГУП «НИИПП» М. 2002 г.).
Для оценки диапазона рабочих глубин обнаружения лазерного импульса можно принять ε=(0,06-0,11)м-1.
В этом случае из формулы (2) следует, что Zm=(150-200) м.
При этом предельная глубина океана при ε≤0,025 м-1 и h≥(Zm+100) м может достигать величины: sup Zm≈500 м.
Расчет чувствительности лазерной системы, как правило, связан с проведением сложного исследования, включающего решение задачи проверки гипотез в интересах расчета основных характеристик обнаружения (вероятности правильного обнаружения и ложной тревоги), расчета и измерения энергии фоновых засветок при заданных значениях поля зрения приемника и длительности строба, анализ и экспериментальные измерения собственных шумов аппаратуры и т.п.
Но при упрощенной методике расчета целесообразно исходить из практического опыта. Как правило, в известных импульсных лазерных системах зеленого диапазона, работающих по распределенным целям (т.е. в высотомерах, батимерах) уровень принимаемого сигнала соответствует мощности Pmin=(1-10) нВт, при длительности импульса, лежащей в пределах τимп=(2-15) не (с учетом уширения импульса при отражении от распределенной цели и при распространении в рассеивающих неоднородных средах). В нашем случае целесообразно принять Emin≥2,5⋅10-18 Дж (это менее шести сигнальных фотонов на входном зрачке, т.е. зеркале или объективе приемника). Этого достаточно, чтобы выделить сигнал в стробе на фоне собственных шумов приемника, т.е. в темное время суток и/или при глубинах погружения более 100 м. В этом случае для обеспечения расчетных дальностей требуется лазерный передатчик с энергией излучения в импульсе (или сигнальной пачке импульсов): Епер/ηп=Emin⋅1018, Епер≈3 Дж. Такая энергия может быть реализована в твердотельных лазерах, в частности, на алюмоиттриевом гранате (с примесью неодима, иттербия и др.).
В случае моноимпульсного режима измерений возможна реализация лазера по схеме с модуляцией добротности и диодной накачкой. При этом достижимы следующие характеристики:
- энергия в импульсе не менее 3 Дж;
- длительность импульса (5-10) нс;
- частота следования импульсов (1-5) Гц.
В случае использования перспективных лазеров на тонких дисках можно реализовать измерительный сигнал в виде пачки из нескольких (десятков) импульсов, в этом случае:
- энергия излучения в импульсе (0,1-1,3) Дж;
- длительность импульса (5-30) нс;
- частота следования импульсов (30-500) Гц.
Этими вариантами, конечно, не исчерпываются возможные реализации.
Одним из важнейших вопросов при обосновании конструктивного облика лазерного лага для ПА является выбор числа его лучей и их ориентация. Число лучей антенны лазерного лага зависит от задач, решаемых лагом.
Для измерения только продольной составляющей скорости ПА достаточно иметь антенну с двумя лучами, построенную по так называемой «схеме Янус» (Абсолютные и относительные лаги. К.А. Виноградов, В.Н. Кошкарев, Б.А. Осюхин, А.А. Хребтов: Справочник: Судостроение, 1990. - 264 с.)
Помимо устранения нелинейности доплеровской зависимости схема Янус обеспечивает:
- существенное уменьшение погрешности измерения скорости, обусловленной изменением пространственной ориентацией лучей при качке и статистических наклонах ПА (до 3-4°) без привлечения внешней информации;
- компенсацию погрешности, вызванной изменением угла прихода лазерного луча при смещении ПА за время распространения сигнала;
- уменьшение влияния рефракционных искажений лазерного сигнала;
- увеличение в 2 раза скоростной чувствительности лага (по сравнению с односторонней схемой);
- снижение влияния вертикальной составляющей скорости ПА на точность измерения горизонтальных составляющих и др.
Однако двухлучевая схема позволяет оценить только продольную составляющую вектора скорости. Очевидно, что при использовании схемы Янус для измерения двух составляющих необходимо ввести вторую пару лазерных лучей - например симметричную относительно вертикали в плоскости шпангоута (фиг. 2.), получившую название диаметрально-траверзной.
Четырехлучевая система позволяет измерить вектор путевой скорости ПА относительно грунта и рассчитать угол его сноса. Кроме того, данная схема позволяет аналитическим путем рассчитать и глубину под килем ПА.
Из фиг. 2 видно, что глубина под килем ПА может быть рассчитана по формуле

где  - расстояние, проходимое лазерным лучом от излучателя до дна и обратно;
- расстояние, проходимое лазерным лучом от излучателя до дна и обратно;
св скорость лазерного луча в воде;
t - время от момента посылки лазерного луча до его прихода на приемник отраженного лазерного сигнала.
Формирование четырехлучевой диаграммы направленности антенны ПА может быть обеспечено размещением четырех отдельных направленных излучателей, которые одновременно являются и приемниками отраженных от дна лазерных сигналов, смонтированных в одном корпусе.
В предлагаемом техническом решении приемо-передающее устройство лазерного лага формирует пять лучей, один из которых является вертикальным лучом, позволяющий напрямую измерять глубину под килем ПА поскольку аналитически рассчитанная глубина Z может содержать большие погрешности, обусловленные наклонным расстоянием от точки излучения до дна. Эта величина также зависит от глубины места ПА.
В вычислительное устройство 15 может быть введен также блок корреляционной обработки сигналов от «n» передающих и приемных каналов.
Устройство работает следующим образом.
Устройство управления, входящее в состав вычислительного устройства 15 запускает и блок управления и запуска лазерного модуля 1. Лазерный импульс на частоте 0,532 мкм через защитное окно 16 направляется по фиксируемому направлению перпендикулярно дну моря. Для учета временного расширения луча и освещаемой на дне площади необходимо знание гидрооптических характеристик воды в районе эксплуатации лазерного судового измерителя скорости. Для их оценки используется информация об объемном рассеянии воды, которую содержит отраженный лазерный импульс. Оценка гидрооптических характеристик воды в районе эксплуатации лага выполняется посредством блока выработки поправок, который выполнен в виде блока определения прозрачности воды и который размещен в вычислительном устройстве 15. Отраженные импульсы через защитное окно 16 поступают на фотоприемное устройство и далее на схемы первичной и вторичной обработки и записи информации, где они регистрируются для последующей их обработки и интерпретации возможных помех в принимаемых лазерных сигналах. После обработки лазерные сигналы поступают на вход процессора, где происходит их дальнейшая обработка и расчет измеренной глубины. Расстояние до дна вычисляется по измеренному времени между моментами прихода отраженных импульсов и известной скорости света в воде с учетом задержек сигналов, в электронных цепях, прозрачности воды и рассеяния света на взвешенных частицах вещества в водной толще.
По значениям измеренных задержек и известным расстояниям между лазерными лучами в вычислительном устройстве определяют путевую скорость судна.
При этом разделение четырех лучей может осуществляется программно. В этом случае принятые сигналы носового и кормового направлений определяются выражениями:


где n=0, 1, 2, …; Δt-Mm4=0; m1, т2, т3 зависят от значений частоты сигнала и частоты дискретизации f0.
Подобные (4) и (5) выражения имеют место для разделения сигналов Uп0 (nΔt) правого и U10(nΔt) левого бортов. Программная реализация выражений (4) и (5) осуществляется с использованием восьми кольцевых буферов, в которые поступают выходные коды АЦП. Сигналы (4) и (5) могут прореживаться, т.к. последующая обработка может производиться на существенно более низкой частоте дискретизации.
Связь с другими навигационными системами может быть осуществлена по интерфейсу RS-232 (последовательный порт процессора). Решение задачи оценивания доплеровских смещений в четырех пространственных каналах может производиться программно на процессоре ADSP-21990. Математический аппарат алгоритма оценивания спектрального момента с использованием одного значения комплексной корреляционной функции изложен в работе (Kenneth S. Miller, Marvin М. Rochwarger. А со variance approach to spectral moment estimation. // IEEE Trans. Inform. Theory. - Vol. IT - 18. - 1972. - No 5. - p. 588-596).
Опуская выкладки, приведем конечные соотношения. Значение оценки комплексной корреляционной функции для малого значения τs≠0 равно:
где Z, и ZI+I - отсчеты комплексной огибающей эхосигнала.
Оценка спектрального момента может быть получена по формуле (Kenneth S. Miller, Marvin М. Rochwarger. A covariance approach to spectral moment estimation. // IEEE Trans. Inform. Theory. - Vol. IT-18. - 1972. - No 5. - p. 588-596):

При отражении сигналов от грунта из обработки исключаются фрагменты обратного донного рассеяния с «переменной» частотой заполнения импульса.
В зависимости от частоты излучения сигналов существует предельная глубина под килем, когда еще возможна работа по сигналам обратного донного рассеяния. При превышении предельной глубины, работа лага возможна по сигналам объемной реверберации, принимаемым с расстояний 10-50 м. В реальных условиях указанные значения глубин варьируют в зависимости от потерь на трассе распространения, интенсивностей обратного донного рассеяния и объемной реверберации. Переключение цифровой модели лага в необходимый режим работы может осуществляться процессором автоматически, т.е. в данном случае будет происходить адаптация к конкретным гидрологическим условиям. При поступлении от судовых средств навигации данных о текущих углах качек и вертикальной составляющей вектора скорости, выполняется компенсация этих дестабилизирующих факторов. Компенсация сводится к несложным для процессора расчетам по соотношениям:
где Vx, Vv - искомые горизонтальные составляющие вектора скорости;
Vx:i, Vv:i - измеренные лагом составляющие вектора скорости;
Ψ, θ - углы качек;
Vz - вертикальная составляющая вектора скорости.
Предлагаемый лазерный судовой измеритель скорости разработан на промышленно освоенной элементной базе средствах вычислительной техники, что исключает технические риски при его промышленной применимости.
Источники информации
1. Б.С. Ринкявичюс. Лазерная диагностика потоков. МЭИ, 1990.
2. Применение дифракционных решеток в лазерной доплеровской анемометрии. Technisches Messen, 61.1994 7/8, стр. 311-316.
3. Авторское свидетельство SU №1249463 А1, 07.08.1986.
4. Патент JP №1249463 А1, 07.08.1989.
5. Заявка JP №60093956 А, 25.05.1985.
6. Заявка US №2004036873 А1, 26.02.2004.
7. Лазерный доплеровский измеритель скорости для промышленности и транспорта / Ю.Д. Каминский и др. // Лазер-Информ. Информационный бюллетень лазерной ассоциации, №1-2 (592-593), январь 2017, с. 3-7.
8. Патент RU №2435166 С1, 27.11.2011.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения поправок к глубинам, измеренным эхолотом при съемке рельефа дна акватории | 2018 |
|
RU2694084C1 |
| ЛАЗЕРНЫЙ СУДОВОЙ ИЗМЕРИТЕЛЬ СКОРОСТИ | 2019 |
|
RU2708526C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОПРАВОК К ГЛУБИНАМ, ИЗМЕРЕННЫМ ЭХОЛОТОМ ПРИ СЪЕМКЕ РЕЛЬЕФА ДНА АКВАТОРИИ | 2013 |
|
RU2529626C2 |
| ЛАЗЕРНЫЙ ИЗМЕРИТЕЛЬ СКОРОСТИ ВОДНЫХ ПОТОКОВ | 2010 |
|
RU2435166C1 |
| Лазерный судовой измеритель относительной скорости | 2022 |
|
RU2804868C1 |
| Локомотивная система определения скорости движения и пройденного пути | 2023 |
|
RU2808862C1 |
| ПОДВИЖНЫЙ МОРСКОЙ АППАРАТ ДЛЯ ПОДВОДНЫХ ИССЛЕДОВАНИЙ | 2011 |
|
RU2478059C1 |
| СИСТЕМА НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2460043C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ДЛЯ СУДОВ ЛЕДОВОГО ПЛАВАНИЯ | 2011 |
|
RU2489721C1 |
| СПОСОБ КООРДИНАТНО-ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ПОДВОДНЫХ МОБИЛЬНЫХ ОБЪЕКТОВ | 2007 |
|
RU2390098C2 |
Устройство относится к области морского приборостроения и предназначено для использования в качестве относительного и абсолютного лага, а также измерителя скорости течений. Лазерный судовой измеритель скорости содержит передающий и приемный каналы, вычислительное устройство, опорный фотоприемник, устройство отвода оптической энергии лазерного передатчика в опорный приемник и контрольный датчик направления излучения. Передающий и приемный каналы размещены в герметичном корпусе с защитным окном в нижнем основании. Передающий канал содержит: полупроводниковый модуль с дифракционно-оптическим делением лазерного пучка, полупроводниковый модуль, дифракционную решетку, первый объектив, пространственный фильтр и второй объектив. Приемный канал содержит фокусирующий объектив и 5 наборов устройств: диафрагма, фотодиод, предварительный усилитель и преобразователь доплеровского сигнала. Преобразователи подключены к вычислительному устройству. Технический результат заключается в увеличении точности измерений. 2 ил.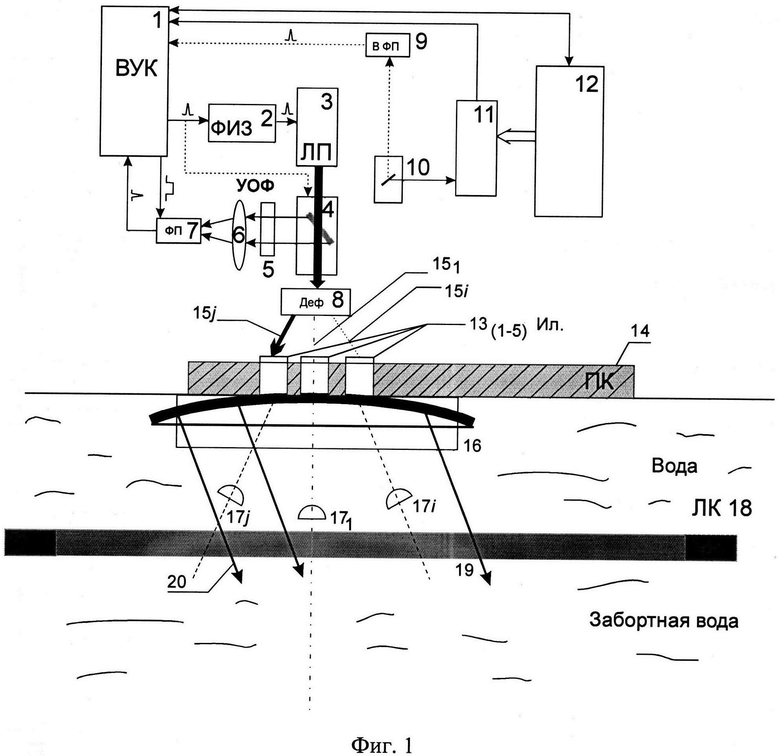
Лазерный судовой измеритель скорости, содержащий передающий канал, включающий полупроводниковый модуль с дифракционно-оптическим делением лазерного пучка и содержащий полупроводниковый модуль, дифракционную решетку, первый объектив, пространственный фильтр, второй объектив и приемный канал, включающий фокусирующий объектив, диафрагму, фотодиод и предварительный усилитель, подключенный к преобразователю доплеровского сигнала, вычислительное устройство, при этом приемный канал дополнительно содержит вторую диафрагму и второй фотодиод с предварительным усилителем, подключенным к второму преобразователю доплеровского сигнала, при этом выходы преобразователей доплеровского сигнала подключены к вычислительному устройству, передающий и приемный каналы размещены в герметичном корпусе, снабженном в нижнем основании корпуса защитным окном, отличающийся тем, что приемный канал дополнительно содержит третью, четвертую и пятую диафрагму и третий, четвертый и пятый фотодиоды с предварительными усилителями, подключенными к третьему, четвертому и пятому преобразователям доплеровского сигнала, при этом выходы третьего, четвертого и пятого преобразователей доплеровского сигнала подключены к вычислительному устройству, дополнительно введены опорный фотоприемник, формирующий «старт»-импульс для отсчета времени задержки между зондирующими приемными импульсами, устройство отвода оптической энергии лазерного передатчика в опорный приемник и контрольный датчик направления излучения, размещенный в кардановом подвесе, связанном с бортовой инерциальной навигационной системой.
| ЛАЗЕРНЫЙ ИЗМЕРИТЕЛЬ СКОРОСТИ ВОДНЫХ ПОТОКОВ | 2010 |
|
RU2435166C1 |
| US 2015185246 A1, 02.07.2015 | |||
| Индикатор масс для масс-спектрометра | 1958 |
|
SU115497A1 |
| US 4210399 A, 01.07.1980 | |||
| WO 2004005940 A1, 15.01.2004. | |||

