Транспортные средства могут быть оборудованы для работы как в автономном режиме, так и в режиме пилотирования человеком. Такие транспортные средства включают в себя зеркала бокового вида, которые выдвигаются для работы в режиме пилотирования человеком. При автономной работе транспортные средства основываются на данных от датчиков, например, от камер, лидара и радиолокатора, и использование зеркал бокового вида не требуется. В этом случае зеркала бокового вида могут быть убраны для уменьшения аэродинамического сопротивления. Однако из-за неисправности зеркала бокового вида могут оставаться в выдвинутом положении. Водитель и/или пассажир могут не замечать этого во время автономной работы, и/или транспортное средство может перемещаться без пассажиров.
Согласно первому объекту настоящего изобретения создан способ контроля зеркал бокового вида в автономных транспортных средствах, при котором:
захватывают посредством компьютера, содержащего процессор и память, второго транспортного средства первое изображение развернутого в первое положение зеркала бокового вида первого транспортного средства, эксплуатируемого в автономном режиме, причем второе транспортное средство находится в пределах диапазона обнаружения зеркала бокового вида первого транспортного средства;
захватывают посредством компьютера второе изображение зеркала бокового вида, развернутого во второе положение;
анализируют посредством компьютера первое и второе изображения для определения рабочего состояния зеркала бокового вида;
проверяют посредством компьютера то, является ли рабочее состояние зеркала бокового вида одним из: (1) застряло в первом положении; (2) застряло во втором положении; (3) застряло между первым и вторым положениями; и (4) может быть развернуто в каждое из первого и второго положений; и
передают посредством компьютера рабочее состояние на дисплей и/или удаленное вычислительное устройство.
Предпочтительно, дополнительно принимают во втором транспортном средстве первый запрос от первого транспортного средства на захват первого изображения; и принимают во втором транспортном средстве второй запрос от первого транспортного средства на захват второго изображения.
Предпочтительно, дополнительно принимают посредством компьютера перед захватом первого изображения запрос на участие в проверке зеркала бокового вида; определяют посредством компьютера то, что второе транспортное средство находится в пределах диапазона обнаружения зеркала бокового вида; и передают ответ в первое транспортное средство с согласием на участие в проверке зеркала бокового вида по меньшей мере частично на основе определения того, что второе транспортное средство находится в диапазоне обнаружения зеркала бокового вида.
Предпочтительно, дополнительно определяют перед передачей ответа в первое транспортное средство то, что второе транспортное средство останется в диапазоне обнаружения зеркала бокового вида в течение заданного периода времени.
Предпочтительно, дополнительно запрашивают участие первого транспортного средства во второй проверке зеркала бокового вида на втором транспортном средстве.
Предпочтительно, дополнительно регулируют направление датчика на втором транспортном средстве для центрирования зеркала бокового вида на первом изображении перед захватом первого изображения.
Предпочтительно, дополнительно определяют по меньшей мере частично на основе определения того, что разница между интенсивностью света сигнального индикатора, связанного с зеркалом бокового вида, на первом изображении и интенсивностью света сигнального индикатора, связанного с зеркалом бокового вида, на втором изображении превышает пороговое значение, что зеркало бокового вида может быть развернуто в каждое из первого и второго положений.
Предпочтительно, первое положение представляет собой выдвинутое положение, а второе положение представляет собой убранное положение, при этом дополнительно определяют то, что второе транспортное средство находится перед первым транспортным средством; и определяют по меньшей мере частично на основе определения того, что интенсивность света сигнального индикатора, связанного с зеркалом бокового вида, на первом изображении превышает интенсивность света сигнального индикатора, связанного с зеркалом бокового вида, на втором изображении, что зеркало бокового вида может быть развернуто в каждое из первого и второго положений.
Согласно второму объекту изобретения создан компьютер, содержащий процессор и память, хранящую инструкции, выполняемые процессором таким образом, что компьютер второго транспортного средства запрограммирован с возможностью:
захвата первого изображения развернутого в первое положение зеркала бокового вида первого транспортного средства, эксплуатируемого в автономном режиме, причем второе транспортное средство находится в пределах диапазона обнаружения зеркала бокового вида первого транспортного средства;
захвата второго изображения зеркала бокового вида, развернутого во второе положение;
анализа первого и второго изображений для определения рабочего состояния зеркала бокового вида;
проверки того, является ли рабочее состояние зеркала бокового вида одним из: (1) застряло в первом положении; (2) застряло во втором положении; (3) застряло между первым и вторым положениями; и (4) может быть развернуто в каждое из первого и второго положений; и
передачи рабочего состояния на дисплей и/или удаленное вычислительное устройство.
Предпочтительно, компьютер дополнительно запрограммирован с возможностью:
приема во втором транспортном средстве первого запроса от первого транспортного средства на захват первого изображения; и
приема во втором транспортном средстве второго запроса от первого транспортного средства на захват второго изображения.
Предпочтительно, компьютер дополнительно запрограммирован с возможностью:
приема перед захватом первого изображения запроса на участие в проверке зеркала бокового вида;
определения того, что второе транспортное средство находится в пределах диапазона обнаружения зеркала бокового вида; и
передачи ответа в первое транспортное средство с согласием на участие в проверке зеркала бокового вида по меньшей мере частично на основе определения того, что второе транспортное средство находится в диапазоне обнаружения зеркала бокового вида.
Предпочтительно, компьютер дополнительно запрограммирован с возможностью определения перед передачей ответа в первое транспортное средство того, что второе транспортное средство останется в диапазоне обнаружения зеркала бокового вида в течение заданного периода времени.
Предпочтительно, компьютер дополнительно запрограммирован с возможностью запроса участия первого транспортного средства во второй проверке зеркала бокового вида на втором транспортном средстве.
Предпочтительно, компьютер дополнительно запрограммирован с возможностью регулировки направления датчика на втором транспортном средстве для центрирования зеркала бокового вида на первом изображении перед захватом первого изображения.
Предпочтительно, компьютер дополнительно запрограммирован с возможностью определения по меньшей мере частично на основе определения того, что разница между интенсивностью света сигнального индикатора, связанного с зеркалом бокового вида, на первом изображении и интенсивностью света сигнального индикатора, связанного с зеркалом бокового вида, на втором изображении превышает пороговое значение, что зеркало бокового вида может быть развернуто в каждое из первого и второго положений.
Предпочтительно, первое положение представляет собой выдвинутое положение, а второе положение представляет собой убранное положение, при этом компьютер дополнительно запрограммирован с возможностью:
определения того, что второе транспортное средство находится перед первым транспортным средством; и
определения по меньшей мере частично на основе определения того, что интенсивность света сигнального индикатора, связанного с зеркалом бокового вида, на первом изображении превышает интенсивность света сигнального индикатора, связанного с зеркалом бокового вида, на втором изображении, что зеркало бокового вида может быть развернуто в каждое из первого и второго положений.
Далее изобретение будет описано более подробно со ссылкой на прилагаемые чертежи, на которых:
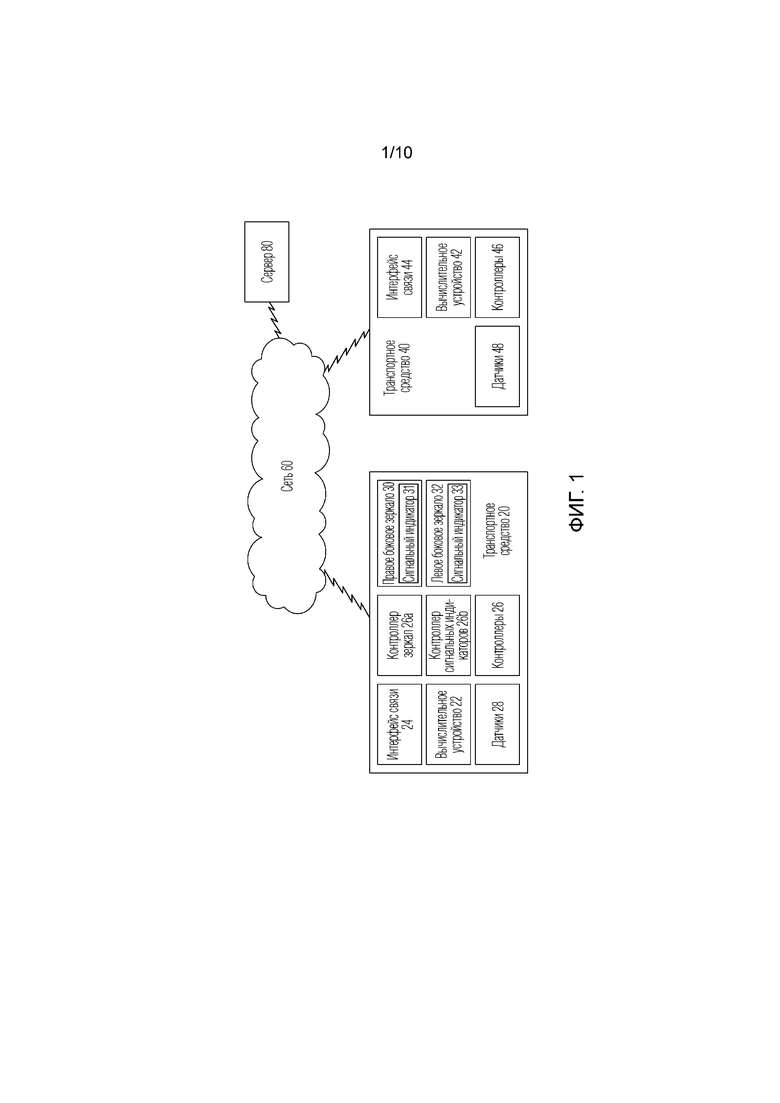
Фиг. 1 - структурная схема примерной системы контроля и управления зеркалами бокового вида транспортного средства;
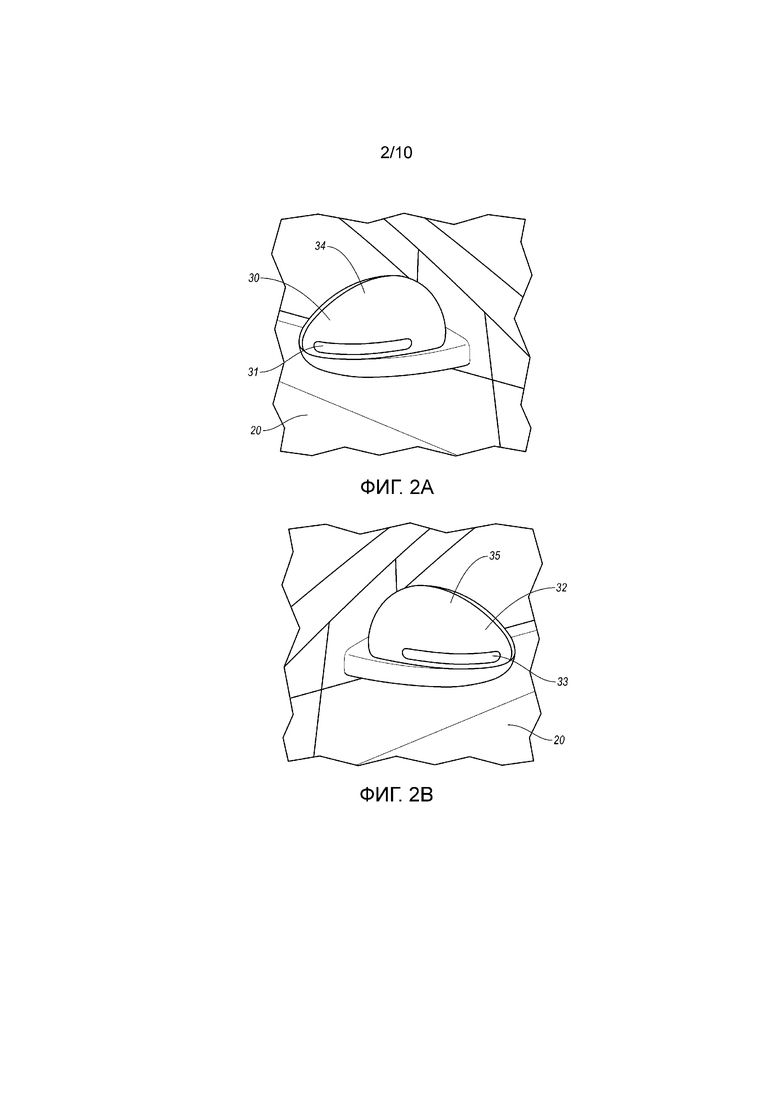
Фиг. 2А - вид в перспективе примерного правого бокового зеркала транспортного средства, включающего в себя сигнальный индикатор;
Фиг. 2B - вид в перспективе примерного левого бокового зеркала транспортного средства, включающего в себя сигнальный индикатор;
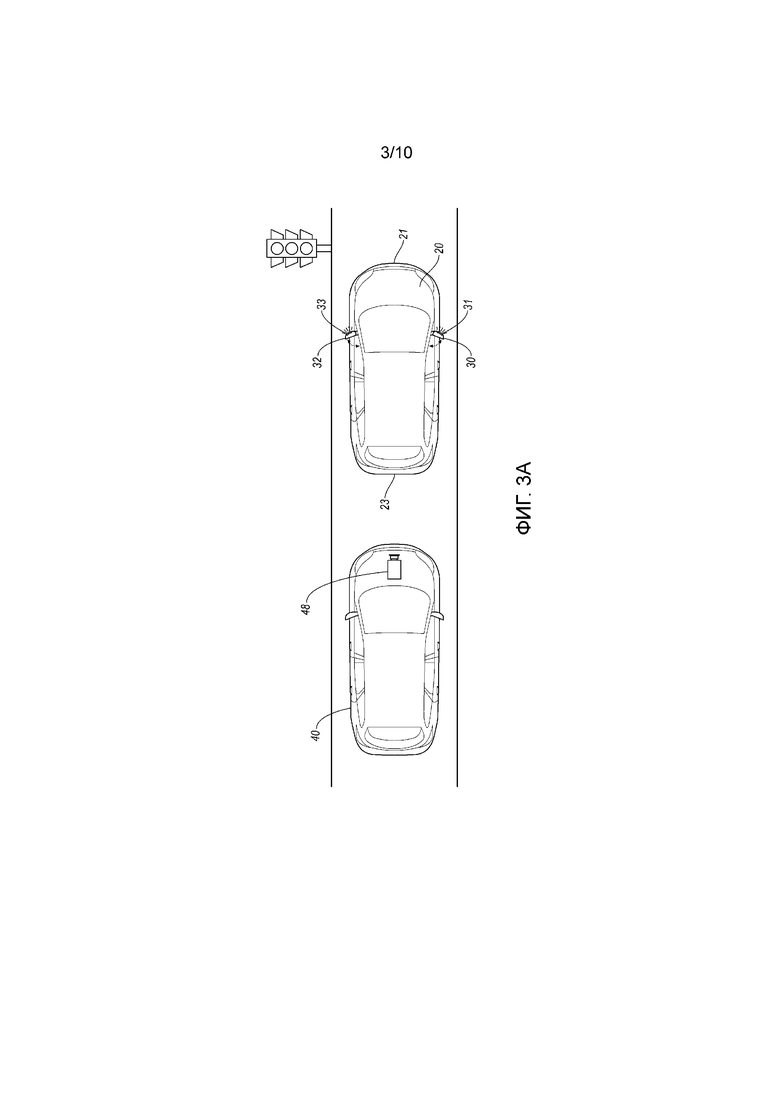
Фиг. 3А - вид сверху первого транспортного средства с выдвинутыми боковыми зеркалами, за которым следует второе транспортное средство;
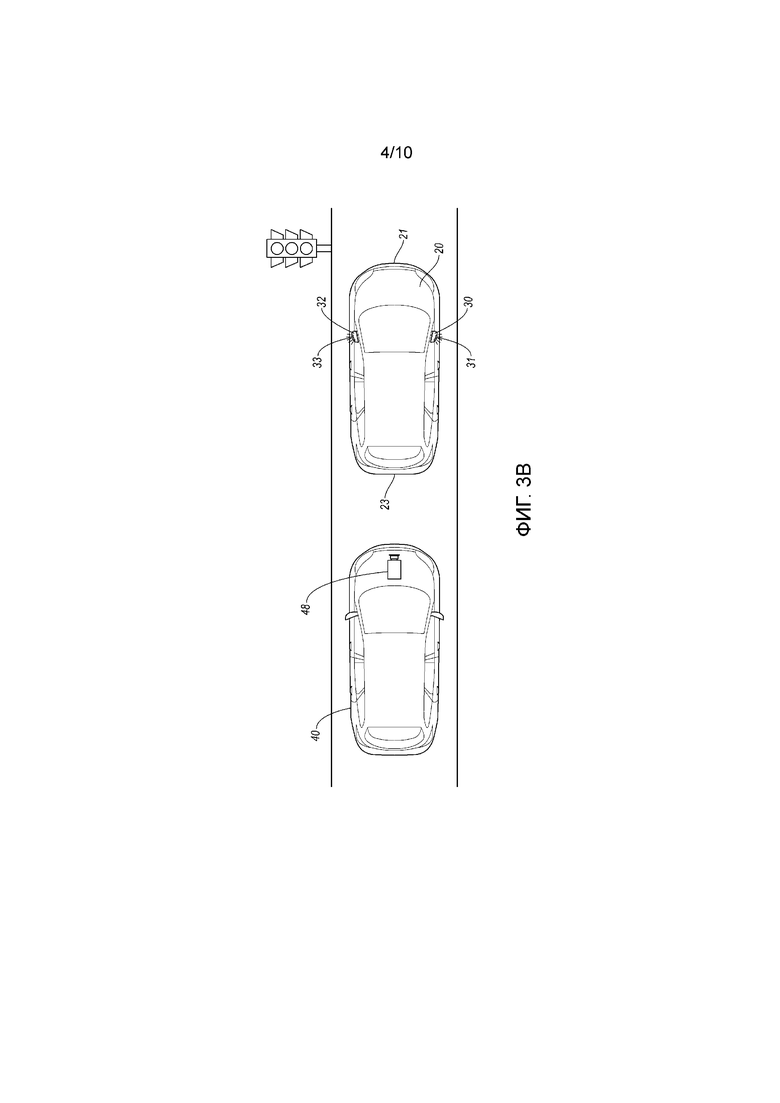
Фиг. 3B - вид сверху первого транспортного средства с убранными боковыми зеркалами, за которым следует второе транспортное средство;
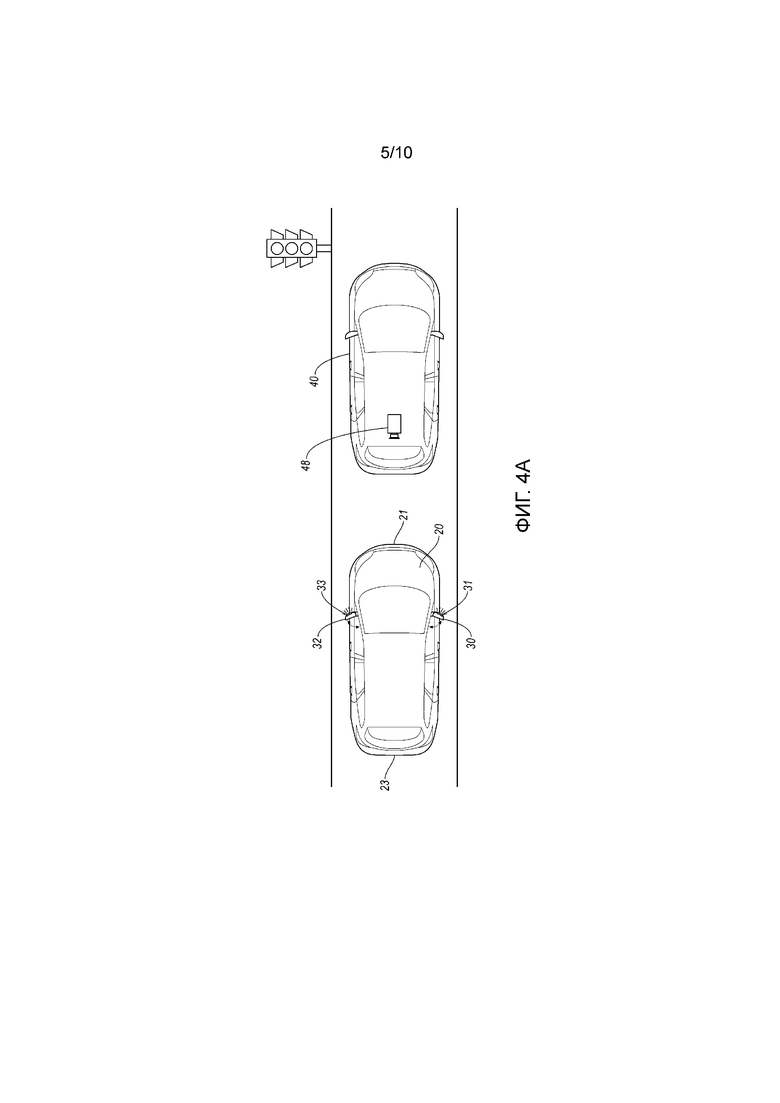
Фиг. 4А - вид сверху первого транспортного средства с выдвинутыми боковыми зеркалами за вторым транспортным средством;
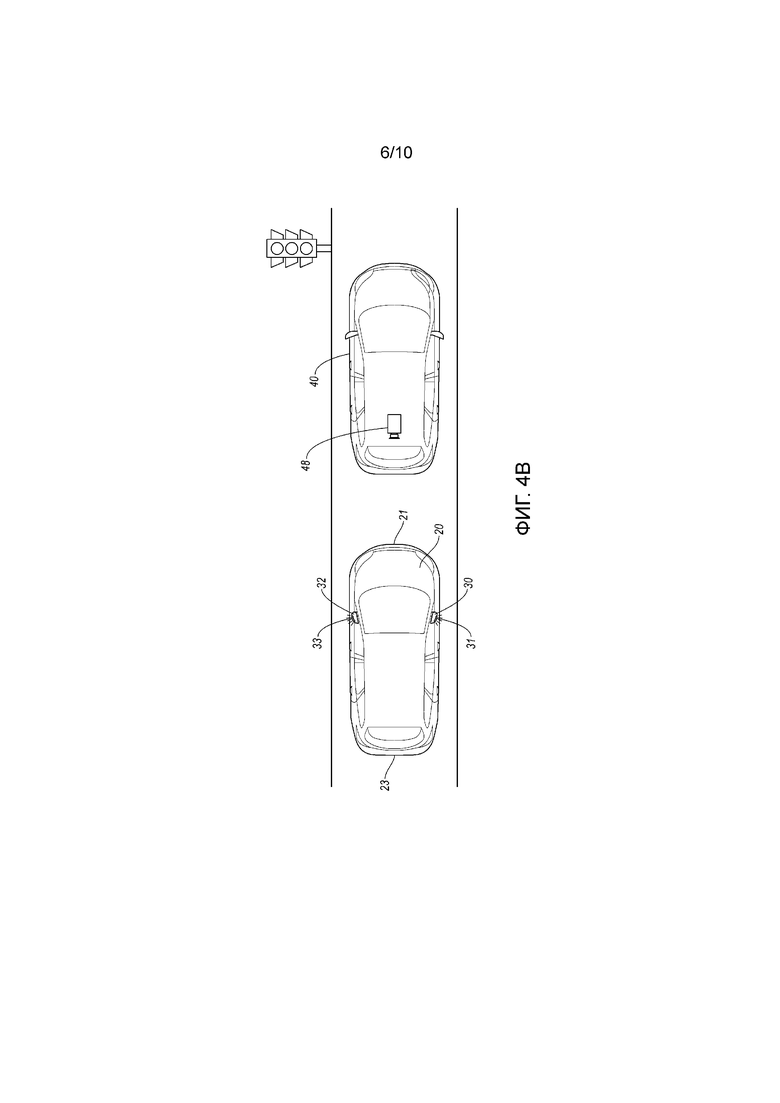
Фиг. 4B - вид сверху первого транспортного средства с убранными боковыми зеркалами за вторым транспортным средством;
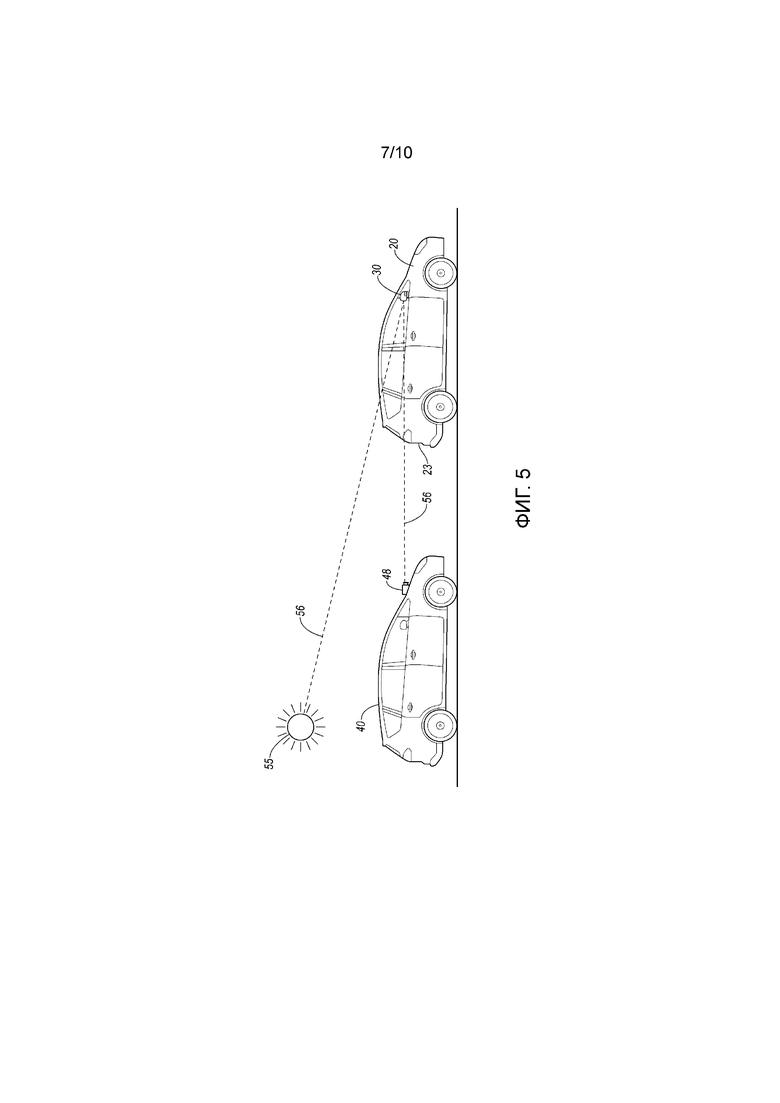
Фиг. 5 - вид сбоку первого транспортного средства с боковым зеркалом, отражающим солнечный свет, так что датчик на втором транспортном средстве может обнаруживать солнечный свет;
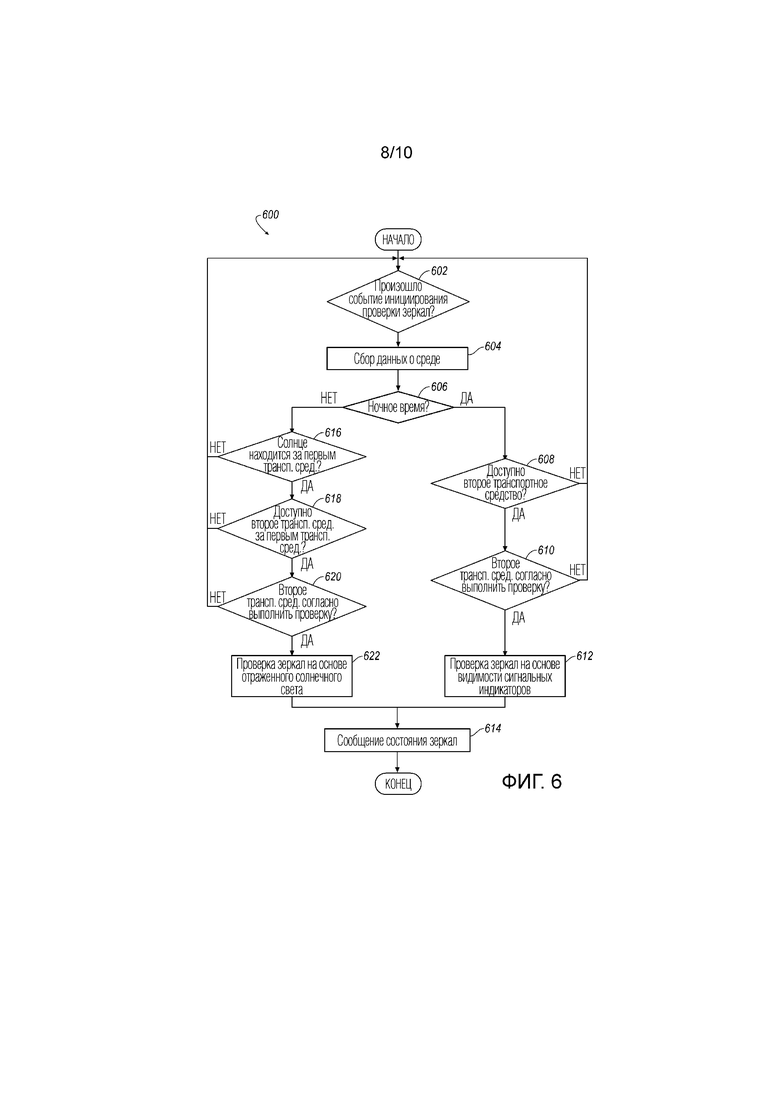
Фиг. 6 - блок-схема примерного процесса определения рабочего состояния зеркал бокового вида для первого транспортного средства;
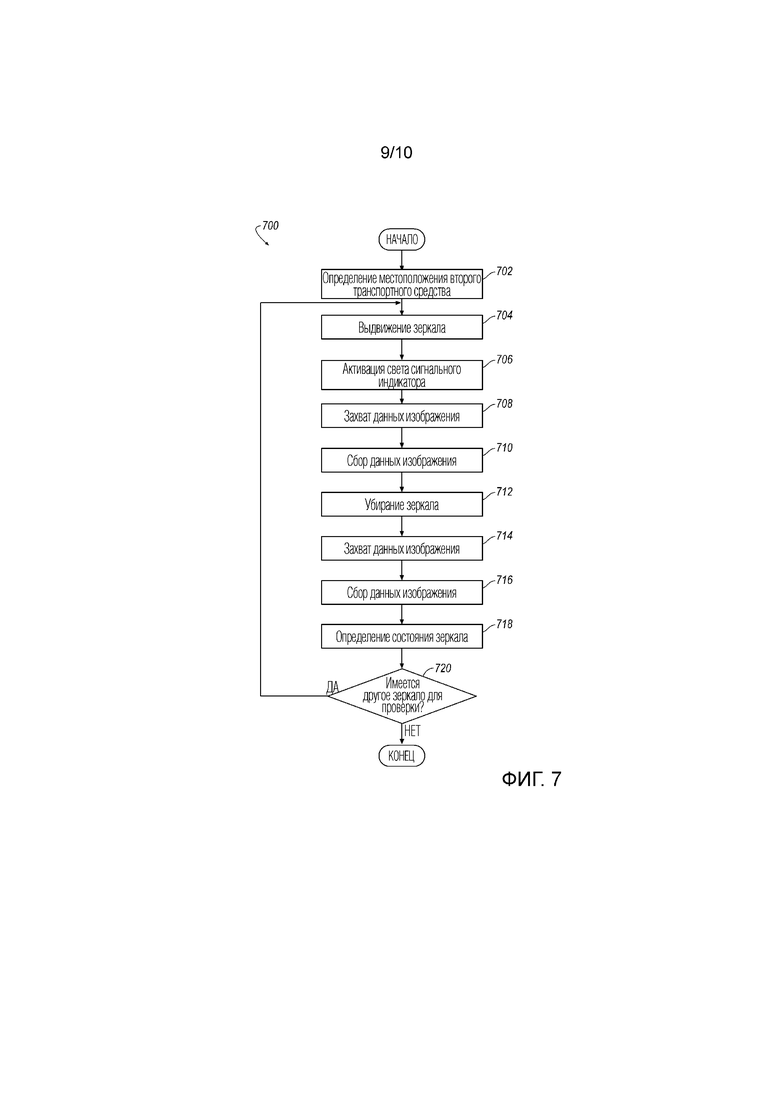
Фиг. 7 - блок-схема примерного подпроцесса определения рабочего состояния зеркала бокового вида первого транспортного средства при работе в ночное время; и
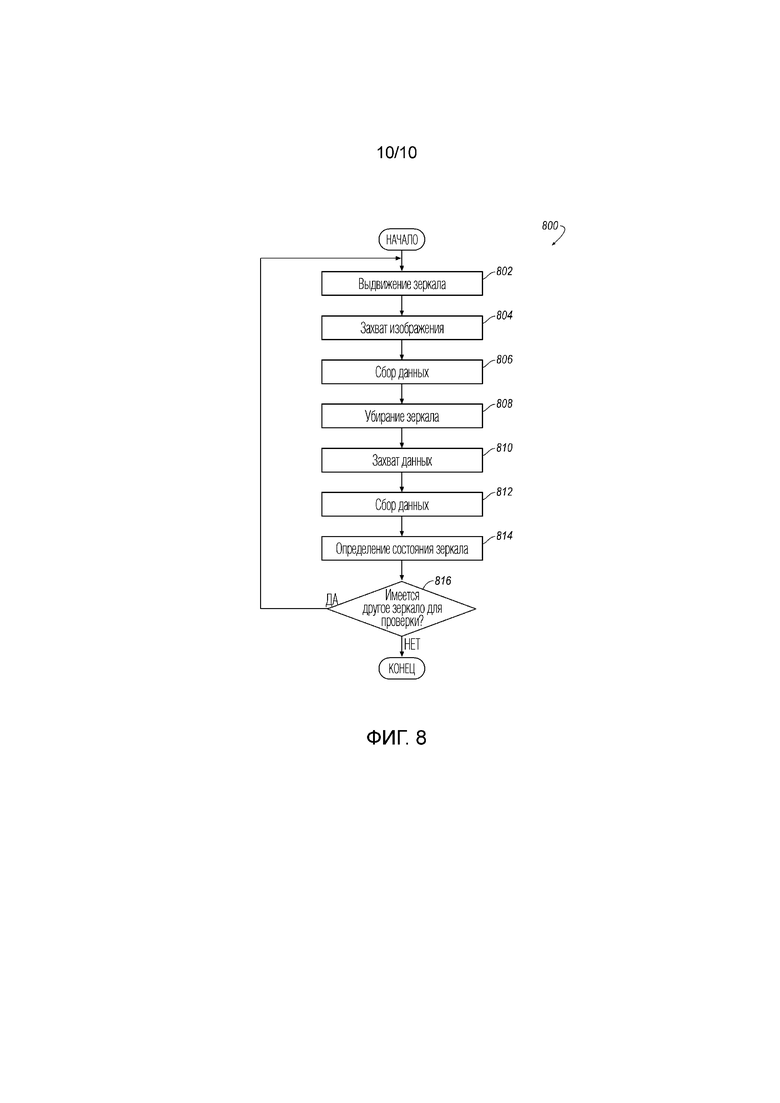
Фиг. 8 - блок-схема примерного подпроцесса определения рабочего состояния зеркала бокового вида первого транспортного средства при работе в дневное время.
Вычислительное устройство может определять рабочее состояние зеркала бокового вида первого транспортного средства на основе данных изображения, т.е. на основе изображений, от датчиков второго транспортного средства. Зеркала бокового вида могут быть определены как механические, т.е. включающие в себя физическую поверхность, которая отражает свет, и которая может тем самым обеспечивать зеркальное изображение, или виртуальные, например, видеоустройства, прикрепленные снаружи к кузову транспортного средства, которые обеспечивают цифровое изображение на экране дисплея для помощи водителю в пилотировании транспортного средства путем обеспечения обзора областей вокруг транспортного средства.
Рабочее состояние в контексте настоящего изобретения означает состояние зеркала в отношении того, может ли зеркало перемещаться между выдвинутым и убранным положениями. Например, зеркало бокового вида может быть выполнено с возможностью перемещения между первым выдвинутым положением для использования водителем транспортного средства, например, для просмотра областей сзади и/или сбоку транспортного средства, и вторым убранным положением для уменьшения аэродинамического сопротивления во время автономной работы транспортного средства. Состояние зеркала бокового вида определяется как «рабочее», если определено, что оно может быть развернуто в каждое из первого и второго положений. Состояние зеркала бокового вида является «нерабочим», если определено, что зеркало бокового вида не может быть развернуто в одно или оба из первого и второго положений. Нерабочие состояния включают в себя застревание в первом положении, застревание во втором положении и застревание между первым и вторым положениями.
Для определения рабочего состояния вычислительное устройство разворачивает зеркало бокового вида на первом транспортном средстве в первое выдвинутое положение для пилотирования человеком. Вычислительное устройство получает, например, посредством связи между транспортными средствами, первые данные изображения от датчиков, встроенных во второе транспортное средство, причем первые данные изображения указывают положение зеркала бокового вида после разворота в первое положение. Затем вычислительное устройство разворачивает зеркало бокового вида первого транспортного средства во второе убранное положение и получает вторые данные изображения от датчиков, встроенных во второе транспортное средство, указывающие положение зеркала бокового вида.
Как описано подробно ниже, на основе сравнения первых данных со вторыми данными вычислительное устройство определяет рабочее состояние зеркала бокового вида.
Разворот зеркала бокового вида определен в настоящем документе как изменение положения (т.е. перемещение относительно одной или более осей, которые могут быть определены для трехмерной системы координат) зеркала бокового вида относительно кузова транспортного средства, к которому оно прикреплено. Позиционирование или складывание зеркала бокового вида для уменьшения аэродинамического сопротивления означает нахождение зеркала в «убранном» положении. Разворот зеркала бокового вида в положение для пилотирования человеком означает нахождение зеркала в «выдвинутом» положении. Зеркало бокового вида в любом положении, отличном от «выдвинутого» или «убранного», определено как находящееся в «некорректно развернутом» положении.
Слова, используемые в настоящем документе для указания направлений, связанных с первым и вторым транспортными средствами, такие как передний, задний, обратный, вперед, назад, перед, за, следующий впереди, следующий позади, противоположный, обращенный, левый, правый и т.д. имеют свое обычное значение для транспортного средства с точки зрения водителя транспортного средства, сидящего на водительском сиденье с руками на рулевом колесе.
Способ содержит этапы, на которых захватывают посредством второго транспортного средства первое изображение зеркала первого транспортного средство, развернутого в первое положение; захватывают посредством второго транспортного средства второе изображение зеркала, развернутого во второе положение; и анализируют первое и второе изображения для определения рабочего состояния зеркала.
В способе рабочее состояние может представлять собой одно из следующего: зеркало застряло в первом положении; зеркало застряло во втором положении; зеркало застряло между первым и вторым положениями; и зеркало может быть развернуто в каждое из первого и второго положений.
Способ может дополнительно содержать этап, на котором выводят рабочее состояние для по меньшей мере одного из пользователя и вычислительного устройства. Способ может дополнительно содержать этапы, на которых принимают во втором транспортном средстве первый запрос от первого транспортного средства на захват первого изображения; и принимают во втором транспортном средстве второй запрос от первого транспортного средства на захват второго изображения.
Способ может дополнительно содержать этапы, на которых: принимают перед захватом первого изображения запрос на участие в проверке зеркала; определяют, что второе транспортное средство находится в пределах диапазона обнаружения зеркала; и передают ответ в первое транспортное средство с согласием на участие в проверке зеркала по меньшей мере частично на основе определения, что второе транспортное средство находится в диапазоне обнаружения зеркала.
Способ может дополнительно содержать этап, на котором определяют перед передачей ответа в первое транспортное средство, что второе транспортное средство останется в диапазоне обнаружения зеркала в течение заданного периода времени. Способ может дополнительно содержать этап, на котором запрашивают участие первого транспортного средства во второй проверке зеркала на втором транспортном средстве. Способ может дополнительно содержать этап, на котором регулируют направление датчика на втором транспортном средстве для центрирования зеркала на первом изображении перед захватом первого изображения.
Способ может дополнительно содержать этап, на котором определяют по меньшей мере частично на основе определения, что разница между интенсивностью света сигнального индикатора, связанного с зеркалом, на первом изображении и интенсивностью света сигнального индикатора, связанного с зеркалом, на втором изображении превышает пороговое значение, что зеркало может быть развернуто в каждое из первого и второго положений.
В способе первое положение может представлять собой выдвинутое положение, а второе положение представляет собой убранное положение, и способ может дополнительно содержать этапы, на которых определяют, что второе транспортное средство находится перед первым транспортным средством; и определяют по меньшей мере частично на основе определения, что интенсивность света сигнального индикатора, связанного с зеркалом, на первом изображении превышает интенсивность света сигнального индикатора, связанного с зеркалом, на втором изображении, что зеркало может быть развернуто в каждое из первого и второго положений.
Дополнительно раскрыт компьютер, запрограммированный с возможностью выполнения любого из описанных выше этапов способа. Дополнительно раскрыто транспортное средство, содержащее компьютер. Дополнительно раскрыт компьютерный программный продукт, содержащий машиночитаемый носитель, хранящий инструкции, исполняемые процессором компьютера для выполнения любого из описанных выше этапов способа.
Компьютер запрограммирован с возможностью захвата посредством второго транспортного средства первого изображения зеркала первого транспортного средство, развернутого в первое положение; захвата посредством второго транспортного средства второго изображения зеркала, развернутого во второе положение; и анализа первого и второго изображений для определения рабочего состояния зеркала. Рабочее состояние может представлять собой одно из: зеркало застряло в первом положении; зеркало застряло во втором положении; зеркало застряло между первым и вторым положениями; и зеркало может быть развернуто в каждое из первого и второго положений.
Компьютер может быть дополнительно запрограммирован с возможностью вывода рабочего состояния для по меньшей мере одного из пользователя и вычислительного устройства. Компьютер может быть дополнительно запрограммирован с возможностью приема во втором транспортном средстве первого запроса от первого транспортного средства на захват первого изображения; и приема во втором транспортном средстве второго запроса от первого транспортного средства на захват второго изображения. Компьютер может быть дополнительно запрограммирован с возможностью приема перед захватом первого изображения запроса на участие в проверке зеркала; определения, что второе транспортное средство находится в пределах диапазона обнаружения зеркала; и передачи ответа в первое транспортное средство с согласием на участие в проверке зеркала по меньшей мере частично на основе определения, что второе транспортное средство находится в диапазоне обнаружения зеркала.
Компьютер может быть дополнительно запрограммирован с возможностью определения перед передачей ответа в первое транспортное средство, что второе транспортное средство останется в диапазоне обнаружения зеркала в течение заданного периода времени. Компьютер может быть дополнительно запрограммирован с возможностью запроса участия первого транспортного средства во второй проверке зеркала на втором транспортном средстве. Компьютер может быть дополнительно запрограммирован с возможностью регулировки направления датчика на втором транспортном средстве для центрирования зеркала на первом изображении перед захватом первого изображения.
Компьютер может быть дополнительно запрограммирован с возможностью определения по меньшей мере частично на основе определения, что разница между интенсивностью света сигнального индикатора, связанного с зеркалом, на первом изображении и интенсивностью света сигнального индикатора, связанного с зеркалом, на втором изображении превышает пороговое значение, что зеркало может быть развернуто в каждое из первого и второго положений. Компьютер может быть дополнительно запрограммирован с возможностью определения, что второе транспортное средство находится перед первым транспортным средством; и определения по меньшей мере частично на основе определения, что интенсивность света сигнального индикатора, связанного с зеркалом, на первом изображении превышает интенсивность света сигнального индикатора, связанного с зеркалом, на втором изображении, что зеркало может быть развернуто в каждое из первого и второго положений, причем первое положение представляет собой выдвинутое положение, а второе положение представляет собой убранное положение.
Фиг. 1 представляет собой схематическое изображение системы 10 проверки рабочего состояния зеркал бокового вида на первом транспортном средстве 20 на основе данных изображения от второго транспортного средства 40. Первое транспортное средство 20 и второе транспортное средство 40 коммуникативно связаны по сети 60. Дополнительно, система 10 может включать в себя сервер 80, коммуникативно связанный с первым и вторым транспортными средствами по сети 60.
Как описано подробно ниже, вычислительное устройство 22 первого транспортного средства 20 выдает инструкции контроллерам 26 на выдвижение (разворот в первое выдвинутое положение) и убирание (разворот во второе убранное положение) правого и левого зеркал 30, 32 бокового вида. Вычислительное устройство 22 принимает соответствующие данные от датчиков, связанных со вторым транспортным средством 40, после обеспечения каждой из этих инструкций. На основе данных вычислительное устройство 22 определяет, находятся ли зеркала бокового вида в рабочем состоянии.
Как дополнительно описано ниже, в некоторых случаях вычислительное устройство 22 может на основе собранных данных определять, находятся ли правый и левый сигнальные индикаторы 31, 33, соответственно связанные с правым и левым зеркалами 30, 32 бокового вида, в рабочем состоянии. Рабочее состояние правого и левого сигнальных индикаторов 31, 33 в контексте настоящего изобретения означает, что они включаются и выключаются на основе соответствующих команд от вычислительного устройства 22. Как описано ниже, в некоторых случаях сигнальный индикатор 31, 33 может управляться для непрерывной передачи света. В других случаях сигнальный индикатор 31, 33 может управляться для мигания. В целях описания сигнальный индикатор 31, 33 «включен» тогда, когда он передает свет. То есть в случае если сигнальный индикатор 31, 33 управляется для мигания, сигнальный индикатор 31, 33 считается «включенным» в контексте настоящего изобретения в течение периода времени, когда он передает свет. Пример сигнального индикатора 31, 33 в нерабочем состоянии представляет собой сигнальный индикатор 31, 33 с перегоревшей лампочкой.
Описание, касающееся данных, собираемых и оцениваемых вычислительным устройством 22, встроенным в первое транспортное средство 20, не исключает такие операции в одном или более вторых транспортных средствах 40. Вычислительное устройство 42 второго транспортного средства 40 и сервер 80 коммуникативно связаны с вычислительным устройством 22 первого транспортного средства 20 и могут выполнять различные операции, относящиеся в настоящем документе к вычислительному устройству 22. Например, каждый из сервера 80 и вычислительного устройства 42 второго транспортного средства 40 может собирать данные, связанные с рабочим состоянием зеркал 30, 32 бокового вида или сигнальных индикаторов 31, 33, и на основе данных выполнять определения, связанные с состоянием зеркал 30, 32 бокового вида и/или сигнальных индикаторов 31, 33. В качестве другого примера каждый из сервера 80 и вычислительного устройства 42 второго транспортного средства может собирать данные и выполнять определения, связанные с относительными положениями первого и второго транспортных средств 20, 40.
Транспортное средство 20 в общем представляет собой наземное автономное транспортное средство, имеющее три или более колес, например, легковой автомобиль, грузовой автомобиль малой грузоподъемности и т.д. Первое транспортное средство 20 выполнено с возможностью работы в автономном режиме и режиме пилотирования человеком в соответствии с раскрытыми реализациями и включает в себя одно или более вычислительных устройств 22. Вычислительное устройство 22 коммуникативно связано с интерфейсом 24 связи, множеством контроллеров 26 и одним или более датчиками 28. Как описано более подробно ниже, множество контроллеров 26 включает в себя контроллер 26а боковых зеркал для управления разворотом боковых зеркал 30, 32 и контроллер 26b сигнальных индикаторов для включения и выключения сигнальных индикаторов 31, 33.
Вычислительное устройство 22 включает в себя процессор и память, например, известные в уровне техники. Кроме того, память включает в себя одну или более форм машиночитаемых носителей и хранит инструкции, исполняемые процессором, для выполнения различных операций, включая раскрытые в настоящем документе. Вычислительное устройство 22 выполняет вычисления для пилотирования транспортного средства 20 во время автономной работы. Например, вычислительное устройство 22 может быть запрограммировано с возможностью управления, например, посредством контроллеров 26, одним или более из тормозов транспортного средства, силовой установки (например, управление ускорением транспортного средства 20 путем управления одним или более из двигателя внутреннего сгорания, электродвигателя, гибридного двигателя и т.д.), системы рулевого управления, системы климат-контроля, внутренних и/или внешних световых приборов и т.д., а также для определения, следует ли и когда следует вычислительному устройству 22 принять управление такими операциями вместо человека-оператора.
Следует отметить, что, хотя раскрытые в настоящем документе система/способ определения рабочего состояния зеркал 30, 32 бокового вида и сигнальных индикаторов 31, 33 первого транспортного средства 20 хорошо подходят для автономных транспортных средств, система/способ не зависят от автономной, полуавтономной или ручной работы первого транспортного средства 20.
Вычислительное устройство 22 в общем выполнено с возможностью связи по сети связи транспортного средства, например, по локальной сети контроллеров (CAN) или т.п.; причем сеть транспортного средства 20 может включать в себя механизм проводной или беспроводной связи, известный в уровне техники, например, Ethernet или другие протоколы связи.
По сети транспортного средства вычислительное устройство 22 может передавать сообщения различным устройствам транспортного средства и/или принимать сообщения от различных устройств, например, от контроллеров 26, датчиков 28 и т.д. Альтернативно или дополнительно, в случаях, когда вычислительное устройство 22 фактически содержит множество устройств, сеть связи транспортного средства может быть использована для связи между устройствами, представленными в настоящем раскрытии как вычислительное устройство 22. Кроме того, как отмечено ниже, различные контроллеры 26 или датчики 28 могут передавать данные в вычислительное устройство 22 по сети связи транспортного средства.
Вычислительное устройство 22 запрограммировано с возможностью связи через интерфейс 24 связи со вторым транспортным средством 40 и в некоторых случаях с сервером 80 по сети 60. Интерфейс 24 связи может включать в себя один или более радиочастотных приемопередатчиков для использования различных проводных и беспроводных сетевых технологий, например, сотовой связи, BLUETOOTH®, специализированной связи на коротких расстояниях (DSRC) и проводных и/или беспроводных пакетных сетей.
Контроллеры 26 в данном контексте включают в себя вычислительные устройства, которые, как правило, запрограммированы с возможностью управления конкретной подсистемой транспортного средства. Примеры включают в себя контроллер силового агрегата, контроллер тормозов и контроллер рулевого управления. Контроллер 26 может представлять собой электронный блок управления (ECU), известный в уровне техники, возможно, включающий в себя дополнительное программирование, как описано в настоящем документе. Контроллеры 26 могут быть коммуникативно связаны с вычислительным устройством 22 и принимать инструкции от него для приведения в действие подсистемы в соответствии с инструкциями. Например, контроллер 26 тормозов может принимать инструкции от вычислительного устройства 22 для приведения в действие тормозов транспортного средства 20.
Множество контроллеров 26 транспортного средства 20 может включать в себя известные электронные блоки управления (ECU) или т.п., включая в качестве неограничивающих примеров один или более контроллеров силового агрегата, один или более контроллеров тормозов и один или более контроллеров рулевого управления. Каждый из контроллеров может включать в себя соответствующие процессоры и память и один или более исполнительных механизмов. Контроллеры могут быть запрограммированы и подключены к шине связи транспортного средства 20, например, к шине локальной сети контроллеров (CAN) или шине коммутируемой локальной сети (LIN), для приема инструкций от вычислительного устройства 22 и управления исполнительными механизмами на основе инструкций.
В частности, транспортное средство 20 включает в себя контроллер 26а зеркал и контроллер 26b сигнальных индикаторов. Контроллер 26а зеркал включает в себя вычислительное устройство и один или более исполнительных механизмов, например, двигатель или соленоид, и запрограммирован с возможностью приема инструкций от вычислительного устройства 22 для управления разворотом правого и левого зеркал 30, 32 бокового вида на основе инструкций.
Контроллер 26b сигнальных индикаторов включает в себя вычислительное устройство и одно или более устройств переключения света, например, силовой транзистор или реле, и запрограммирован с возможностью приема инструкций от вычислительного устройства 22 для включения и выключения правого и левого сигнальных индикаторов 31, 33. Контроллер 26b сигнальных индикаторов для облегчения проверки одного или обоих из правого и левого зеркал 30, 32 бокового вида может включать непрерывный режим работы правого и левого сигнальных индикаторов 31, 33, т.е. так, чтобы они не мигали. Альтернативно, контроллер 26b сигнальных индикаторов может управлять сигнальными индикаторами 31, 33 так, чтобы они мигали с частотой мигания, например, один герц.
Дополнительно, в некоторых случаях контроллер 26b сигнальных индикаторов может включать в себя средство диагностики для определения работоспособности сигнального индикатора 31, 33. В таких случаях контроллер 26b сигнальных индикаторов может принимать инструкции от вычислительного устройства 22 для диагностики сигнального индикатора 31, 33. Контроллер 26b сигнальных индикаторов может диагностировать сигнальный индикатор 31, 33 и передавать результат, например, «лампочка сигнального индикатора работает» или «лампочка сигнального индикатора перегорела», в вычислительное устройство 22.
Датчики 28 могут включать в себя множество устройств, известных в уровне техники, для передачи данных по шине связи транспортного средства. Датчики 28 могут быть запрограммированы с возможностью сбора данных, связанных с транспортным средством 20 и средой, в которой работает транспортное средство 20. В качестве примера и без ограничения датчики 28 могут включать в себя, например, камеры, лидар, радиолокатор, ультразвуковые датчики, инфракрасные датчики, датчики давления, акселерометры, гироскопы, датчики температуры, датчики Холла, оптические датчики, датчики напряжения, датчики тока, механические датчики, например, переключатели, и т.д. Датчики 28 могут быть использованы для определения параметров среды, в которой работает транспортное средство 20, например, погодных условий, уклона дороги, местоположения дороги и т.д.
В частности, датчики 28 могут обеспечивать данные для определения местоположения одного или более вторых транспортных средств 40 вблизи первого транспортного средства 20. Близость к первому транспортному средству 20 в настоящем документе означает нахождение в пределах диапазона, в котором датчики 48 второго транспортного средства 40 могут собирать данные изображения зеркал 30, 32 бокового вида первого транспортного средства 20, так что могут быть выполнены определения в отношении работоспособности зеркал 30, 32 бокового вида и/или сигнальных индикаторов 31, 33, связанных с зеркалами 30, 32 бокового вида.
Транспортное средство 40 также представляет собой в общем наземное автономное транспортное средство, например, мотоцикл, легковой автомобиль, грузовой автомобиль малой грузоподъемности и т.д. Транспортное средство 40 включает в себя вычислительное устройство 42, аналогичное вычислительному устройству 22 транспортного средства 20. Вычислительное устройство 42 включает в себя процессор и память, например, известные в уровне техники. Кроме того, память включает в себя одну или более форм машиночитаемых носителей и хранит инструкции, исполняемые процессором, для выполнения различных операций, включая раскрытые в настоящем документе.
Вычислительное устройство 42 коммуникативно связано с интерфейсом 44 связи, множеством контроллеров 46 и одним или более датчиками 48. Интерфейс 44 связи, множество контроллеров 46 и датчики 48 могут быть аналогичны соответствующему интерфейсу 24 связи, множеству контроллеров 26 и датчикам 28, встроенным в транспортное средство 20.
Вычислительное устройство 42 запрограммировано с возможностью приема запросов от других вычислительных устройств, например, от вычислительного устройства 22, и на основе запросов сбора данных изображения, т.е. одного или более изображений, посредством датчиков 48, связанных со вторым транспортным средством 40. Вычислительное устройство 42 может быть дополнительно запрограммировано с возможностью передачи данных изображения в вычислительное устройство 22 или на сервер 80. Дополнительно, вычислительное устройство 42 может быть запрограммирован с возможностью оценки данных изображения в отношении рабочего состояния зеркал 30, 32 бокового вида и сигнальных индикаторов 31, 33, связанных с первым транспортным средством 20. Определение рабочего состояния сигнальных индикаторов 31, 33 включает в себя определение, включены или выключены сигнальные индикаторы 31, 33. Как отмечено выше, в некоторых случаях сигнальный индикатор 31, 33 может управляться для мигания. В таких случаях вычислительное устройство 42 должно отслеживать сигнальные индикаторы 31, 33 в течение заданного периода времени, например, в течение двух секунд, для определения, имеет ли сигнальный индикатор 31, 33 периоды, во время которых он включен, т.е. передает свет. Вычислительное устройство 42 может принимать сообщение, например, от вычислительного устройства 22, о том, что сигнальный индикатор 31, 33 управляется для мигания. В других случаях вычислительное устройство 42 может «не знать», управляется ли сигнальный индикатор 31, 33 для мигания или для непрерывной работы, и может отслеживать сигнальный индикатор 31, 33 в течение заданного периода времени для гарантии того, что в случае мигания сигнального индикатора 31, 33 вычислительное устройство 42 захватит период «включения».
Вычислительное устройство 42 может, например, захватывать изображения каждые 0,25 секунд в течение периода, составляющего две секунды, и определять, имеет ли сигнальный индикатор 31, 33 первую интенсивность света на одном или более изображениях, которая больше второй интенсивности света на одном или более других изображениях на величину, превышающую пороговое значение разности. В случае если вычислительное устройство 42 определяет, что сигнальный индикатор 31, 33 мигает, вычислительное устройство 42 захватывает изображение сигнального индикатора 31, 33 с первой (более высокой) интенсивностью света (указывающей, что сигнальный индикатор 31, 33 передает свет) и передает в вычислительное устройство 22 или на сервер 80 для использования при определении рабочего состояния зеркал 30, 32 бокового вида.
Один или более датчиков 48 включают в себя цифровую камеру или другое оптическое устройство формирования изображения, которое может принимать изображения и генерировать данные изображения, представляющие изображения. Собранные данные изображения обычно представлены в цифровом формате, включая одно или более изображений, каждое из которых содержит пиксели различных цветов и интенсивностей, как известно в уровне техники.
Сеть 60 представляет собой один или более механизмов, посредством которых первое транспортное средство 20, второе транспортное средство 40 и сервер 80 могут осуществлять связь друг с другом, и может представлять собой один или более различных механизмов проводной или беспроводной связи, включая любое необходимое сочетание механизмов проводной (например, кабель и волокно) и/или беспроводной (например, сотовая, беспроводная, спутниковая, микроволновая и радиочастотная) связи и любую необходимую топологию сети (или топологии при использовании множества механизмов связи). Связь может представлять собой двухточечную связь, например, связь между транспортными средствами (V2V) и связь между транспортным средством и инфраструктурой (V2I) (совместно V2X) или связь через промежуточные устройства, например, спутники связи, ретрансляционные станции связи и т.д. Примерные сети связи включают в себя сети беспроводной связи, локальные сети (LAN) и/или глобальные сети (WAN), включая интернет, обеспечивающие службы передачи данных.
Сервер 80 может представлять собой один или более компьютеров-серверов, каждый из которых в общем включает в себя по меньшей мере один процессор и по меньшей мере одну память, причем память хранит инструкции, исполняемые процессором, включая инструкции для выполнения различных этапов и процессов, описанных в настоящем документе. Сервер 80 может включать в себя или быть коммуникативно связан с хранилищем данных для хранения собранных данных. Сервер 80 иногда называется «удаленным», это означает, что он является внешним по отношению к транспортным средствам 20, 40 и требует беспроводную связь для осуществления связи с вычислительными устройствами 22, 42.
Сервер 80 может быть запрограммирован с возможностью сбора данных и выполнения определений, связанных с положением (абсолютным и относительным) первого и второго транспортных средств 20, 40, рабочим состоянием зеркал 30, 32 бокового вида и сигнальных индикаторов 31, 33.
Фиг. 2A и 2B показывают соответственно примерное правое зеркало 30 бокового вида и примерное левое зеркало 32 бокового вида.
Правое зеркало 30 бокового вида включает в себя примерный сигнальный индикатор 31. Фиг. 2А показывает правое зеркало 30 бокового вида в первом выдвинутом положении относительно первого транспортного средства 20. Сигнальный индикатор 31 расположен на первой стороне 34 правого зеркала 30 бокового вида, так что сигнальный индикатор 31 обращен вперед, т.е. в том же направлении, что и передняя часть 21 (Фиг. 3А) транспортного средства 20 с зеркалом 30 в первом положении.
Подобным образом левое зеркало 32 бокового вида включает в себя примерный сигнальный индикатор 33. Как показано на Фиг. 2B, сигнальный индикатор 33 расположен на первой стороне 35 левого зеркала 32 бокового вида, так что сигнальный индикатор 33 обращен вперед, т.е. в том же направлении, что и передний конец 21 транспортного средства 20 с зеркалом 32 в первом выдвинутом положении.
Как рассмотрено подробно ниже и проиллюстрировано на Фиг. 3А, 3B, 4A и 4B, вычислительное устройство 22 в некоторых случаях может проверять работу правого и левого зеркал 30, 32 бокового вида в ночное время путем определения видимости сигнальных индикаторов 31, 33 правого и левого зеркал 30, 32 бокового вида для каждого из первого и второго положений зеркал. Выражение «в ночное время» определено в контексте настоящего изобретения как условие достаточно темного внешнего освещения для того, чтобы вычислительное устройство 22 могло отличать включенный сигнальный индикатор 31, 33 от выключенного сигнального индикатора на основе изображения, захваченного датчиком 48. Отличие в данном контексте означает разницу интенсивности света между включенным состоянием и выключенным состоянием, превышающую заданное пороговое значение, причем заданное пороговое значение может зависеть от условия внешнего освещения. В практической системе условие «ночного времени» может быть определено как условие внешнего освещения ниже заданного порогового значения яркости. «Ночное время» также может называться «темным временем суток» в настоящем документе.
Определение видимости сигнальных индикаторов 31, 33 может быть выполнено, например, на основе данных изображения, захваченных датчиками 48 второго транспортного средства 40 за первым транспортным средством 20, как показано на Фиг. 3А и 3B. Альтернативно, оно может быть выполнено на основе данных изображения, захваченных датчиками 48 второго транспортного средства 40 перед первым транспортным средством 20, как показано на Фиг. 4А и 4B.
Фиг. 3А представляет собой вид сверху первого транспортного средства 20 перед вторым транспортным средством 40. Первое транспортное средство 20 включает в себя правое и левое зеркала 30, 32 бокового вида, развернутые в первое положение. Второе транспортное средство 40 включает в себя датчик 48, который может представлять собой, например, камеру или другое устройство захвата изображения.
Сигнальные индикаторы 31, 33 установлены на или в правом и левом зеркалах 30, 32 бокового вида, так что они могут быть обнаружены с передней части 21 транспортного средства 20, но не с задней части 23 транспортного средства 20. Соответственно, захваченное датчиком 48 изображение правого и левого зеркал 30, 32 бокового вида и первого выдвинутого положения, как показано на Фиг. 3А, не будет включать сигнальные индикаторы 31, 33.
Фиг. 3B представляет собой вид сверху первого транспортного средства 20 перед вторым транспортным средством 40 в тех же положениях, что и на Фиг. 3А. Однако на Фиг. 3B правое и левое зеркала 30, 32 бокового вида развернуты во второе убранное положение. В этом втором убранном положении по меньшей мере участок каждого из сигнальных индикаторов 31, 33 может быть обнаружен из положения за первым транспортным средством 20. Соответственно, захваченное датчиком 48 изображение правого и левого зеркал 30, 32 бокового вида во втором убранном положении будет включать по меньшей мере участок сигнальных индикаторов 31, 33.
Фиг. 4А представляет собой вид сверху первого транспортного средства 20 за вторым транспортным средством 40. На Фиг. 4А зеркала 30, 32 бокового вида снова находятся в первом выдвинутом положении. Второе транспортное средство 40 включает в себя датчик 48, например, камеру или другое устройство захвата изображения, обращенный в направлении задней части транспортного средства 40, так что он может захватывать изображения первого транспортного средства 20 за вторым транспортным средством 40.
В этой конфигурации изображение правого и левого зеркал 30, 32 бокового вида, захваченное датчиком 48, будет включать сигнальные индикаторы 31, 33.
Фиг. 4B представляет собой вид сверху первого транспортного средства 20 за вторым транспортным средством 40. На Фиг. 4B зеркала 30, 32 находятся во втором убранном положении. В этой ситуации сигнальные индикаторы 31, 33 не могут быть обнаружены с передней части первого транспортного средства 20. Соответственно, захваченное датчиком 48 изображение правого и левого зеркал 30, 32 не будет включать сигнальные индикаторы 31, 33.
Другие относительные местоположения и/или перемещения первого транспортного средства 20 и второго транспортного средства 40 также могут поддерживать определение работоспособности зеркал 30, 32 бокового вида. Например, первое и второе транспортные средства 20, 40 могут двигаться в противоположных направлениях или стоять в противоположных направлениях на перекрестке. Датчик 48 на втором транспортном средстве 40 может быть выполнен с возможностью обращения к транспортному средству 20, так что могут быть захвачены изображения зеркал 30, 32 бокового вида в каждом из первого выдвинутого и второго убранного положений.
Кроме того, как рассмотрено подробно ниже и проиллюстрировано на Фиг. 5, система 10 в некоторых случаях может проверять работу правого и левого зеркал 30, 32 бокового вида в дневное время путем обнаружения солнечного света, отраженного в зеркалах 30, 32 в первом выдвинутом положении, и определения, что отраженный солнечный свет от правого и левого зеркал 30, 32 бокового вида во втором убранном положении не может быть обнаружен.
Как показано на Фиг. 5, если правое и левое зеркала 30, 32 бокового вида первого транспортного средства 20 находятся в первом выдвинутом положении, и солнце находится в положении за первым транспортным средством 20, прямой солнечный свет 56 может отражаться от одного или от обоих зеркал 30, 32 бокового вида. Прямой солнечный свет 56 может отражаться в таком направлении, что датчик 48 второго транспортного средства 40 может захватывать первое изображение, включающее отраженный солнечный свет. При размещения правого и левого зеркал бокового вида первого транспортного средства 20 во втором убранном положении второе изображение, захваченное датчиком 48 второго транспортного средства 40, больше не будет включать отраженный солнечный свет. На основе сравнения первого и второго изображений вычислительное устройство 22 может определять работоспособность правого и/или левого зеркал 30, 32 бокового вида.
Фиг. 6 представляет собой блок-схему примерного процесса 600 определения рабочего состояния зеркал 30, 32 бокового вида для первого транспортного средства 20. Процесс 600 начинается на этапе 602.
На этапе 602 вычислительное устройство 22 определяет, произошло ли событие инициирования проверки зеркал. Событие инициирования проверки зеркал определено в контексте настоящего изобретения как состояние первого транспортного средства 20, которое поддерживает определение рабочего состояния зеркала 30, 32 бокового вида, например, остановка на красный сигнал светофора, попадание в пробку или парковка на автомобильной стоянке.
Например, вычислительное устройство 22 может быть запрограммировано с возможностью определения рабочего состояния зеркал 30, 32 бокового вида после каждого включения зажигания первого транспортного средства 20. Вычислительное устройство 22 может определять, что произошло событие инициирования проверки зеркал при остановке первого транспортного средства 20 на красный сигнал светофора после включения зажигания первого транспортного средства 20. В случае если проверка зеркал не завершена при первой остановке транспортного средства 20, вычислительное устройство 22 может определять, что произошло другое событие инициирования проверки зеркал при остановке первого транспортного средства 20 на следующем красном сигнале светофора.
Событие инициирования может альтернативно или дополнительно включать в себя указание, что наступает проверка зеркал бокового вида, или что она просрочена. В качестве другого примера вычислительное устройство 22 может быть запрограммировано с возможностью проведения проверки зеркал один раз в месяц. По прошествии месяца с последней проверки зеркал вычислительное устройство 22 может продолжать попытку проверки зеркал каждый раз, когда первое транспортное средство 20 находится в состоянии, которое поддерживает проверку зеркал 30, 32 бокового вида до тех пор, пока вычислительное устройство 22 не завершит процесс 600 проверки зеркал.
После определения, что произошло событие инициирования проверки зеркал, процесс 600 продолжается на этапе 604. В случае если вычислительное устройство 22 определяет, что событие инициирования проверки зеркал не произошло, процесс 600 продолжается на этапе 602.
На этапе 604 вычислительное устройство 22 собирает данные о среде первого транспортного средства 20. Собранные данные могут включать в себя время суток, текущий уровень внешнего освещения, доступность второго транспортного средства 40 перед или за первым транспортным средством 20, наличие и направление солнечного света и указатели того, как долго первое транспортное средство 20 будет оставаться в состоянии, которое поддерживает проверку зеркал. После сбора данных о среде первого транспортного средства 20 процесс 600 продолжается на этапе 606.
На этапе 606 процесс 600 определяет, относится ли время суток к ночному времени. Ночное время относится к условию достаточно темного внешнего освещения, чтобы вычислительное устройство 22 могло отличать включенный сигнальный индикатор от выключенного сигнального индикатора на основе изображения, захваченного датчиком 48. Например, вычислительное устройство 22 может определять, что достаточно темно для выполнения проверки зеркал, когда внешнее освещение ниже заданного порогового значения яркости. Дополнительно или альтернативно, вычислительное устройство 22 может определять, что достаточно темно для проведения ночной проверки зеркал на основе времени суток, календарной даты и местоположения первого транспортного средства 20. Например, вычислительное устройство 22 может на основе таблиц, указывающих время захода солнца в зависимости от местоположения и календарной даты, определять, что 30 января в 17:30 в Детройте, штат Мичиган достаточно темно для обнаружения сигнальных индикаторов 31, 33.
В случае если вычислительное устройство 22 определяет ночное время, процесс 600 продолжается на этапе 608. В случае если вычислительное устройство 22 определяет, что время суток не относится к ночному времени, процесс 600 продолжается на этапе 614. «Не ночное время» также может называться в настоящем документе «дневным временем».
На этапе 608 процесс 600 определяет доступность второго транспортного средства 40 для выполнения проверки зеркал бокового вида. Вычислительное устройство 22 может определять, что второе транспортное средство 40 доступно для проведения проверки зеркал бокового вида в случае, если второе транспортное средство 40 остановилось вблизи первого транспортного средства 20, т.е. в диапазоне перед первым транспортным средством 20 или за первым транспортным средством 20 в положении, в котором датчики 48 на втором транспортном средстве 40 могут захватывать изображения зеркал 30, 32 бокового вида.
Например, вычислительное устройство 22 может определять, что второе транспортное средство 40 доступно, если транспортное средство 40 остановилось непосредственно перед или непосредственно за первым транспортным средством 20 на той же полосе движения и на меньшем расстоянии от первого транспортного средства 20, чем заданное расстояние. Заданное расстояние может быть фиксированным, например, 50 метров. В качестве другого примера вычислительное устройство 22 может определять, что второе транспортное средство 40 доступно в случае, если оно остановилось на противоположной полосе движения в положении, обращенном к первому транспортному средству 20, так что датчики 48 на втором транспортном средстве 40 могут обнаруживать зеркала бокового вида первого транспортного средства 20.
В случае если вычислительное устройство 22 определяет, что второе транспортное средство 40 доступно, процесс 600 продолжается на этапе 610. В случае если вычислительное устройство 22 определяет, что второе транспортное средство 40 недоступно, процесс 600 продолжается на этапе 602.
На этапе 610 процесс 600 определяет, согласно ли второе транспортное средство 40 выполнить проверку зеркал. Например, вычислительное устройство 22 может передавать сообщение в вычислительное устройство 42, связанное со вторым транспортным средством 40, с запросом на участие вычислительного устройства 42 в проверке зеркал.
Вычислительное устройство 42 может оценивать несколько критериев для определения, следует ли участвовать в проверке зеркал. Сначала второе транспортное средство 40 может оценить, останется ли второе транспортное средство 40 в пределах диапазона первого транспортного средства 20 для обнаружения зеркала в течение заданного периода времени. Заданный период времени может представлять собой достаточно долгий период для выполнения проверки зеркал.
Например, в случае если первое транспортное средство 20 и второе транспортное средство 40 движутся друг за другом в колонне, и транспортное средство 40 не намерено покидать колонну в течение заданного периода времени, вычислительное устройство 42 второго транспортного средства 40 может определять, что первое и второе транспортные средства 20, 40 будут находиться в диапазоне поддержки проверки зеркал дольше заданного периода времени, и что возможно выполнение проверки зеркал. Вычислительное устройство 42 может соглашаться на выполнение проверки зеркал.
В другом примере транспортное средство 40 может определять, что транспортное средство 40 покинет колонну раньше заданного периода времени, или что колонна движется по извилистым дорогам, что не позволяет проверку зеркал, и отклонять запрос на участие в проверке зеркал. В качестве другого примера вычислительное устройство 42 второго транспортного средства 40 может определять, что условия внешнего освещения не позволяют выполнение проверки зеркал. Например, внешнее освещение может быть слишком ярким из-за солнца или света от других транспортных средств и/или инфраструктуры (например, уличных фонарей) для выполнения проверки зеркал.
В качестве другого примера второе транспортное средство 40 может запрашивать участие первого транспортного средства 20 в проверке зеркал на втором транспортном средстве 40. В некоторых случаях вычислительное устройство 42 может соглашаться на проверку зеркал только в случае, если вычислительное устройство 22 первого транспортного средства 20 согласно на осуществление ответного действия.
Дополнительно, вычислительное устройство 42 может оценивать другие критерии, например, погодные условия, скорость движения, доступность датчиков 48 для выполнения проверки зеркал, местоположение зеркал 30, 32 на первом транспортном средстве 20 относительно местоположения датчиков 48 на втором транспортном средстве и т.д. для определения, будет ли вычислительное устройство 42 второго транспортного средства 40 участвовать в проверке зеркал.
В случае если вычислительное устройство 42 согласно, процесс продолжается на этапе 612. В случае если вычислительное устройство 42 не согласно, процесс возвращается на этап 602. «Согласие» вычислительного устройства 42 означает, что вычислительное устройство 42 отвечает на запрос сообщением, указывающим, что транспортное средство 40 будет участвовать в проверке зеркал.
На этапе 612 процесс 600 определяет рабочее состояние зеркал 30, 32 бокового вида на основе видимости соответствующих сигнальных индикаторов 31, 33 и положения второго транспортного средства 40 в соответствии с подпроцессом 700, как описано ниже. После завершения подпроцесса 700 процесс 600 продолжается на этапе 614.
На этапе 614, который может следовать после этапа 612 или этапа 622, процесс 600 сообщает и сохраняет рабочее состояние зеркал 30, 32 бокового вида. В случае если вычислительное устройство 22 определяет, что одно или оба зеркала 30, 32 бокового вида находятся в рабочем состоянии, вычислительное устройство 22 может сохранять этот результат вместе с меткой времени/даты в локальной памяти и может выводить данные на сервер 80 для хранения. В случае если вычислительное устройство 22 определяет, что одно или оба зеркала 30, 32 бокового вида находятся в нерабочем состоянии (застряли в одном из первого или второго положений или между первым и вторым положениями), вычислительное устройство 22 также может сохранять результат в локальной памяти или выводить результат на сервер 80. Дополнительно или альтернативно, вычислительное устройство 22 может выводить результат пользователю первого транспортного средства 20, например, посредством устройства отображения в первом транспортном средстве 20 текста на мобильном телефоне пользователя первого транспортного средства 20 и т.д., или сообщения, указывающего рабочее состояние зеркал 30, 32 бокового вида. После вывода и сохранения состояния зеркал 30, 32 бокового вида процесс 600 завершается.
На этапе 616, который может следовать после этапа 606, процесс 600 определяет, находится ли солнце в положении за первым транспортным средством 20. Положение за первым транспортным средством 20 может включать в себя положения непосредственно за первым транспортным средством 20 (т.е. с задней стороны 23 первого транспортного средства 20 в положении вдоль оси, проходящей непосредственно через середину первого транспортного средства 20) или в пределах заданного диапазона углов, например, +/- пять градусов, от оси, проходящей через первое транспортное средство 20.
После определения нахождения солнца за первым транспортным средством 20 процесс 600 продолжается на этапе 618. В случае если вычислительное устройство 22 определяет, что солнце не находится за первым транспортным средством 20, процесс продолжается на этапе 602.
На этапе 618 процесс 600 определяет доступность второго транспортного средства 40 за первым транспортным средством 20. Например, вычислительное устройство 22 может определять, остановилось ли второе транспортное средство 40 на той же полосе движения, что и первое транспортное средство 20, и за первым транспортным средством 20 в пределах диапазона 50 метров или другого заданного расстояния. После определения, что за первым транспортным средством 20 доступно второе транспортное средство 40, процесс 600 продолжается на этапе 620.
На этапе 620 процесс 600 определяет, согласно ли второе транспортное средство 40 выполнить проверку зеркал, как описано выше со ссылкой на этап 610. В случае если вычислительное устройство 42 согласно, процесс продолжается на этапе 622. В случае если вычислительное устройство 42 не согласно, процесс возвращается на этап 602.
На этапе 622 процесс 600 проверяет работу зеркал 30, 32 бокового вида на основе видимости отраженного солнечного света в соответствии с подпроцессом 800, как описано ниже. После завершения подпроцесса 800 процесс 600 продолжается на этапе 614. Как описано выше, на этапе 614 вычислительное устройство сохраняет и/или выводит состояние одного или обоих зеркал 30, 32 бокового вида. После завершения этапа 614 процесс 600 завершается.
Фиг. 7 представляет собой блок-схему примерного подпроцесса 700 определения рабочего состояния одного или более зеркал 30, 32 бокового вида первого транспортного средства 20 при работе в ночное время. Подпроцесс 700 инициируется на этапе 612 процесса 600 и начинается на этапе 702.
На этапе 702 подпроцесс 700 определяет местоположение второго транспортного средства 40 относительно первого транспортного средства 20, т.е. находится ли второе транспортное средство 40 перед или за первым транспортным средством 20. После определения вычислительным устройством 22, находится ли второе транспортное средство 40 перед или за первым транспортным средством 20, подпроцесс 700 продолжается на этапе 704.
На этапе 704 вычислительное устройство 22 первого транспортного средства 20 разворачивает, например, правое зеркало 30 бокового вида в первое выдвинутое положение. После разворота правого зеркала 30 бокового вида в первое выдвинутое положение процесс 700 продолжается на этапе 706.
На этапе 706 вычислительное устройство 22 активирует сигнальный индикатор 31, связанный с правым зеркалом 30 бокового вида. Дополнительно, в транспортном средстве 20 с возможностью диагностики сигнального индикатора вычислительное устройство 22 может определять, например, посредством контроллера 26b сигнальных индикаторов, работает ли сигнальный индикатор 31. После активации сигнального индикатора 31 процесс 700 продолжается на этапе 708.
На этапе 708 вычислительное устройство 42, связанное со вторым транспортным средством 40, захватывает первое изображение правого зеркала 30 бокового вида. Это может быть инициировано запросом от вычислительного устройства 22 на захват первого изображения вычислительным устройством 42.
После приема запроса вычислительное устройство 42 второго транспортного средства 40 может регулировать направление датчика 48 для центрирования зеркала 30, 32 на первом изображении. Например, в случае если второе транспортное средство 40 находится за первым транспортным средством 20, второе транспортное средство 40 может регулировать горизонтальное направление датчика 48 в правую сторону первого транспортного средства 20 и дополнительно регулировать угол наклона датчика так, чтобы зеркало 30 находилось по существу в средине первого изображения. Кроме того, вычислительное устройство 42 может регулировать фокусное расстояние датчика 48 так, чтобы зеркало 30 занимало определенный процент первого изображения в пределах заданного диапазона, например, в диапазоне от 20% до 80%. В некоторых случаях горизонтальный угол датчика относительно второго транспортного средства 40, т.е. угол датчика 48 относительно оси, проходящей через первое транспортное средство от задней части к передней части, может быть зафиксирован. В этих случаях транспортное средство 40 может регулировать угол второго транспортного средства 40 относительно первого транспортного средства 20.
После регулировки угла, фокусного расстояния и т.д. датчика 48 вычислительное устройство 42 получает посредством датчика 48, связанного со вторым транспортным средством 40, одно или более первых изображений правого зеркала 30 бокового вида на первом транспортном средстве 20. В случае если второе транспортное средство 40 находится за первым транспортным средством 20, как показано, например, на Фиг. 3А, и в случае если правое зеркало 30 надлежащим образом развернуто в первое положение, первое изображение не будет включать сигнальный индикатор 31. С другой стороны, в случае если второе транспортное средство 40 находится перед первым транспортным средством 20, как показано на Фиг. 4А, первое изображение будет включать сигнальный индикатор 31. Как описано выше, сначала вычислительное устройство 42 может определять, мигает ли сигнальный индикатор 31 на зеркале 30. В случае если сигнальный индикатор 31 мигает, вычислительное устройство 42 захватывает первое изображение во время периода «включения» сигнального индикатора 31. После захвата первого изображения подпроцесс 700 продолжается на этапе 710.
На этапе 710 вычислительное устройство 42, связанное со вторым транспортным средством 40, может передавать первые данные изображения, представляющие первое изображение, в вычислительное устройство 22, связанное с первым транспортным средством 20. Дополнительно или альтернативно, вычислительное устройство 42 может передавать первые данные изображения на сервер 80 или сохранять данные в памяти, связанной с вычислительным устройством 42. После передачи и/или сохранения первых данных изображения процесс 700 продолжается на этапе 712.
На этапе 712 вычислительное устройство 22 подает команду контроллеру 26а зеркал, выдавая инструкцию контроллеру 26а зеркал на разворот правого зеркала 30 во второе убранное положение. Далее процесс 700 продолжается на этапе 714.
На этапе 714 вычислительное устройство 42, связанное со вторым транспортным средством 40, захватывает второе изображение правого зеркала 30 бокового вида. Это может быть инициировано запросом от вычислительного устройства 22 на захват второго изображения вычислительным устройством 42.
После приема запроса вычислительное устройство 42 второго транспортного средства 40 может центрировать зеркало 30 на втором изображении путем регулировки угла, фокусного расстояния и т.д. датчика 48, как описано в отношении этапа 708. Затем вычислительное устройство 42 получает посредством датчика 48, связанного со вторым транспортным средством 40, одно или более вторых изображений правого зеркала 30 бокового вида на первом транспортном средстве 20. В случае если второе транспортное средство 40 находится за первым транспортным средством 20, как показано, например, на Фиг. 3B, и в случае если правое зеркало 30 надлежащим образом развернуто во второе положение, второе изображение будет включать сигнальный индикатор 31. Вычислительное устройство 42 может определять, мигает ли сигнальный индикатор 31 на зеркале 30. В случае если сигнальный индикатор 31 мигает, вычислительное устройство 42 захватывает второе изображение во время периода «включения» сигнального индикатора 31. С другой стороны, в случае если второе транспортное средство 40 находится перед первым транспортным средством 20, как показано на Фиг. 4B, первое изображение не будет включать сигнальный индикатор 31. После захвата второго изображения процесс 700 продолжается на этапе 716.
На этапе 716 вычислительное устройство 42 передает вторые данные изображения, представляющие второе изображение, в вычислительное устройство 22, связанное с первым транспортным средством 20. Дополнительно или альтернативно, вычислительное устройство 42 может передавать вторые данные изображения на сервер 80 или сохранять данные в памяти, связанной с вычислительным устройством 42. После передачи и/или сохранения вторых данных изображения подпроцесс 700 продолжается на этапе 718.
На этапе 718 вычислительное устройство 22 определяет состояние правого зеркала 30 на основе первых и вторых данных изображения. Состояние правого зеркала может быть определено, например, на основе таблицы соответствия, такой как проиллюстрированная ниже Таблица 1.
Таблица 1
Выражение «сигнальный индикатор виден» в данном контексте определено как интенсивность света, превышающая заданное пороговое значение.
Для определения того, что зеркало бокового вида находится в рабочем состоянии, могут быть использованы другие алгоритмы. Например, вычислительное устройство может определять, что разница интенсивности света сигнального индикатора между первыми данными изображения и вторыми данными изображениями превышает заданное пороговое значение. Достаточная разница интенсивности света между первыми и вторыми данными изображения является указанием того, что зеркало 30 бокового вида переместилось из первого положения во второе положение ожидаемым образом.
В качестве другого примера на основе положения второго транспортного средства относительно первого транспортного средства вычислительное устройство 22 может быть запрограммировано с возможностью идентификации одних из первых или вторых данных изображения как включающих в себя прямой свет от сигнального индикатора 31, 33. Например, в случае если второе транспортное средство 40 находится за первым транспортным средством 20, вычислительное устройство 22 может быть запрограммировано с возможностью определения, что свет от сигнального индикатора 31, 33 ожидается во вторых данных изображения, а не в первых данных изображения. Далее на основе определения, что интенсивность света от сигнального индикатора 31, 33 во вторых данных изображения больше, чем в первых данных изображения, вычислительное устройство 22 может определять, что соответствующее зеркало 30, 32 находится в рабочем состоянии.
После определения рабочего состояния правого зеркала 30 бокового вида подпроцесс 700 продолжается на этапе 720.
На этапе 720 вычислительное устройство 22 определяет, имеется ли другое зеркало для проверки. В случае если работа левого зеркала 32 бокового вида еще не проверена, подпроцесс 700 продолжается на этапе 704. Затем подпроцесс 700 повторяет этапы 704-718 для левого зеркала 32 бокового вида и связанного сигнального индикатора 33. В случае если работа обоих из правого и левого зеркал 30, 32 бокового вида проверена, подпроцесс 700 завершается.
Подпроцесс 700 описывает вычислительное устройство 22, определяющее рабочее состояние зеркала 30 бокового вида. Однако эти операции также могут быть выполнены вычислительным устройством 42 во втором транспортном средстве 40 или на сервере 80.
После завершения подпроцесса 700 примерный процесс 600, который инициировал примерный подпроцесс 700, продолжается на этапе 614.
Фиг. 8 является блок-схемой примерного подпроцесса 800 определения рабочего состояния зеркала бокового вида первого транспортного средства 20 при работе в дневное время. Подпроцесс 800 инициируется на этапе 622 процесса 600 и начинается на этапе 802.
На этапе 802 вычислительное устройство 22 первого транспортного средства 20 разворачивает, например, правое зеркало 30 бокового вида в первое выдвинутое положение. После разворота правого зеркала 30 бокового вида в первое выдвинутое положение подпроцесс 800 продолжается на этапе 804.
На этапе 804 вычислительное устройство 42, связанное со вторым транспортным средством 40, захватывает первое изображение правого зеркала 30 бокового вида. Сначала вычислительное устройство 22 может передавать сообщение в вычислительное устройство 42 по сети 60 с запросом на захват вычислительным устройством 42 первого изображения правого зеркала 30 бокового вида.
После приема запроса вычислительное устройство 42 второго транспортного средства 40 может центрировать зеркало 30 на первом изображении путем регулировки угла, фокусного расстояния и т.д. датчика 48, как описано в отношении этапа 708. Вычислительное устройство 42 получает посредством датчика 48, связанного со вторым транспортным средством 40, одно или более первых изображений правого зеркала 30 бокового вида на первом транспортном средстве 20. В случае если второе транспортное средство 40 находится за первым транспортным средством 20, как показано, например, на Фиг. 5, и в случае если правое зеркало 30 надлежащим образом развернуто в первое положение, первое изображение может включать отражение прямого солнечного света. После захвата первого изображения подпроцесс 800 продолжается на этапе 806.
На этапе 806 вычислительное устройство 42, связанное со вторым транспортным средством 40, передает первые данные изображения, представляющие первое изображение, в вычислительное устройство 22, связанное с первым транспортным средством 20. Дополнительно или альтернативно, вычислительное устройство 42 может передавать первые данные изображения на сервер 80 или сохранять данные в памяти, связанной с вычислительным устройством 42. После передачи или сохранения первых данных изображения подпроцесс 800 продолжается на этапе 808.
На этапе 808 вычислительное устройство 22 подает одну или более команд в контроллер 26а зеркал, выдавая инструкцию контроллеру 26а зеркал на разворот правого зеркала 30 во второе убранное положение. Далее подпроцесс 800 продолжается на этапе 810.
На этапе 810 вычислительное устройство 42, связанное со вторым транспортным средством 40, захватывает второе изображение правого зеркала 30 бокового вида. Сначала вычислительное устройство 22 может передавать сообщение в вычислительное устройство 42 по сети 60 с запросом на захват вычислительным устройством 42 второго изображения правого зеркала 30 бокового вида.
После приема запроса вычислительное устройство 42 второго транспортного средства 40 может центрировать зеркало 30 на втором изображении путем регулировки угла, фокусного расстояния и т.д. датчика 48, как описано в отношении этапа 708. Вычислительное устройство 42 получает посредством датчика 48, связанного со вторым транспортным средством 40, одно или более вторых изображений правого зеркала 30 бокового вида на первом транспортном средстве 20. В случае если правое зеркало 30 бокового вида развернуто во второе положение, второе изображение не будет включать отраженный солнечный свет. После захвата второго изображения подпроцесс 800 продолжается на этапе 812.
На этапе 812 вычислительное устройство 42 передает вторые данные изображения, представляющие второе изображение, в вычислительное устройство 22, связанное с первым транспортным средством 20. Дополнительно или альтернативно, вычислительное устройство 42 может передавать вторые данные изображения на сервер 80 или сохранять данные в памяти, связанной с вычислительным устройством 42. Далее подпроцесс 800 продолжается на этапе 814.
На этапе 814 подпроцесс 800 определяет состояние правого зеркала 30 на основе первых и вторых данных изображения. Состояние правого зеркала 30 может быть, определено например, на основе приведенной ниже Таблицы 2.
Таблица 2
Выражение «виден» при использовании в приведенной выше таблице может означать уровень яркости, превышающий заданное пороговое значение. Альтернативно выражение «виден» может означать, что контрастность изображения между яркими пятнами (где солнечный свет, вероятно, отражается прямо) и менее яркими пятнами (где солнечный свет, вероятно, не отражается прямо) превышает заданное пороговое значение.
После определения состояния правого зеркала 30 бокового вида подпроцесс 800 продолжается на этапе 816.
На этапе 816 вычислительное устройство 22 определяет, имеется ли другое зеркало для проверки. В случае если работа левого зеркала 32 бокового вида еще не проверена, подпроцесс 800 продолжается на этапе 802. Затем подпроцесс 800 повторяет этапы 802-814 для левого зеркала 32 бокового вида. В случае если работа обоих из правого и левого зеркал 30, 32 бокового вида проверена, подпроцесс 800 завершается.
Подпроцесс 800 описывает вычислительное устройство 22, определяющее рабочее состояние зеркала 30 бокового вида. Однако эти операции также могут быть выполнены вычислительным устройством 42 во втором транспортном средстве 40 или на сервере 80.
В случае если рабочее состояние зеркала 30, 32 бокового вида было определено как в дневное время на основе отраженного солнечного света, так и в ночное время на основе видимости сигнального индикатора 31, 33, может быть получена дополнительная информация о состоянии сигнального индикатора 31, 33. В приведенной ниже Таблице 3 указано состояние зеркала 30, 32 и связанного сигнального индикатора 31, 33 на основе результатов испытаний как в дневное время, так и в ночное время.
Таблица 3
Вычислительные устройства, например, рассмотренные в настоящем документе, в общем включают в себя инструкции, исполняемые одним или более вычислительными устройствами, например, указанными выше, для выполнения описанных выше блоков или этапов процессов. Например, рассмотренные выше этапы процессов могут быть воплощены в виде исполняемых компьютером инструкций.
Исполняемые компьютером инструкции могут быть скомпилированы или интерпретированы из компьютерных программ, созданных с использованием множества языков и/или технологий программирования, включая без ограничения и либо отдельно, либо в сочетании Java™, C, C++, Visual Basic, Java Script, Perl, HTML и т.д. В общем процессор (например, микропроцессор) принимает инструкции, например, из памяти, с машиночитаемого носителя и т.д., и исполняет эти инструкции, тем самым выполняя один или более процессов, включая один или более описанных в настоящем документе процессов. Такие инструкции и другие данные могут храниться в файлах и передаваться с использованием множества машиночитаемых носителей. Файл в вычислительном устройстве в общем представляет собой совокупность данных, хранящихся на машиночитаемом носителе, например, носителе данных, оперативном запоминающем устройстве и т.д.
Машиночитаемый носитель включает в себя любой носитель, который участвует в обеспечении данных (например, инструкций), которые могут быть считаны компьютером. Такой носитель может принимать множество форм, включая, но не ограничиваясь, энергонезависимый носитель, энергозависимый носитель и т.д. Энергонезависимый носитель включает в себя, например, оптические или магнитные диски и другую постоянную память. Энергозависимый носитель включает в себя динамическую память с произвольным доступом (DRAM), которая обычно представляет собой оперативную память. Общие формы машиночитаемых носителей включают в себя, например, флоппи-диск, гибкий диск, жесткий диск, магнитную ленту, любой другой магнитный носитель, CD-ROM, DVD, любой другой оптический носитель, перфорационные карты, бумажную ленту, любой другой физический носитель со схемами расположения отверстий, RAM, PROM, EPROM, FLASH EEPROM, любой другой чип или картридж памяти или любой другой носитель, который может считываться компьютером.
Все выражения, используемые в формуле изобретения, предназначены для приведениях их общепринятых и обычных значений, которые понятны специалисту в области техники, кроме тех случаев, когда здесь явно указано обратное. В частности, использование выражения «указанный» следует читать как перечисление одного или более указанных элементов, кроме тех случаев, когда пункт формулы изобретения отмечает явно обратный случай.
Выражение «примерный» используется в смысле обозначения примера, например, ссылку на «примерное приспособление» следует читать, как просто ссылку на пример приспособления.
Наречие «приблизительно», определяющее значение или результат, означает, что форма, структура, измерение, значение, определение, вычисление и т.д. может отклоняться от точно описанной геометрии, расстояния, измерения, значения, определения, вычисления и т.д., вследствие недостатков материалов, обработки, изготовления, измерений датчиков, вычислений, времени обработки, времени связи и т.д.
На чертежах одинаковые ссылочные позиции обозначают одинаковые элементы. Кроме того, некоторые или все из этих элементов могут быть изменены. В отношении описанных в настоящем документе носителей, процессов, систем, способов и т.д. следует понимать, что, хотя этапы таких процессов и т.д. описаны как происходящие согласно определенной упорядоченной последовательности, такие процессы могут быть осуществлены с описанными этапами, выполняемыми в порядке, отличном от описанного в настоящем документе порядка. Дополнительно следует понимать, что определенные этапы могут быть выполнены одновременно, что могут быть добавлены другие этапы, или что определенные описанные в настоящем документе этапы могут быть опущены. Другими словами, описания процессов в настоящем документе обеспечены в целях иллюстрации конкретных вариантов выполнения и не должны никоим образом толковаться так, чтобы ограничивать заявленное изобретение.
Изобретение относится к способам контроля в автономных транспортных средствах. Способ контроля зеркал бокового вида в автономных транспортных средствах, при котором захватывают посредством компьютера, содержащего процессор и память, второго транспортного средства первое изображение развернутого в первое положение зеркала бокового вида первого транспортного средства, причем второе транспортное средство находится в пределах диапазона обнаружения зеркала бокового вида первого транспортного средства, захватывают второе изображение зеркала бокового вида, развернутого во второе положение. Анализируют первое и второе изображения для определения рабочего состояния зеркала бокового вида, проверяют посредством компьютера, является ли рабочее состояние зеркала бокового вида одним из: застряло в первом положении, застряло во втором положении, застряло между первым и вторым положениями и может быть развернуто в каждое из первого и второго положений и передают посредством компьютера рабочее состояние на дисплей и/или удаленное вычислительное устройство. Достигается повышенный контроль для зеркала бокового вида. 2 н. и 14 з.п. ф-лы, 3 табл., 11 ил.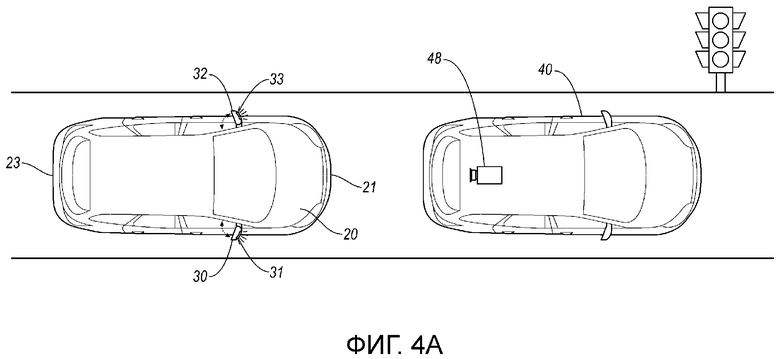
1. Способ контроля зеркал бокового вида в автономных транспортных средствах, при котором:
захватывают посредством компьютера, содержащего процессор и память, второго транспортного средства первое изображение развернутого в первое положение зеркала бокового вида первого транспортного средства, эксплуатируемого в автономном режиме, причем второе транспортное средство находится в пределах диапазона обнаружения зеркала бокового вида первого транспортного средства;
захватывают посредством компьютера второе изображение зеркала бокового вида, развернутого во второе положение;
анализируют посредством компьютера первое и второе изображения для определения рабочего состояния зеркала бокового вида;
проверяют посредством компьютера, является ли рабочее состояние зеркала бокового вида одним из: (1) застряло в первом положении; (2) застряло во втором положении; (3) застряло между первым и вторым положениями и (4) может быть развернуто в каждое из первого и второго положений; и
передают посредством компьютера рабочее состояние на дисплей и/или удаленное вычислительное устройство.
2. Способ по п. 1, при котором дополнительно:
принимают во втором транспортном средстве первый запрос от первого транспортного средства на захват первого изображения и
принимают во втором транспортном средстве второй запрос от первого транспортного средства на захват второго изображения.
3. Способ по п. 1, при котором дополнительно:
принимают посредством компьютера перед захватом первого изображения запрос на участие в проверке зеркала бокового вида;
определяют посредством компьютера то, что второе транспортное средство находится в пределах диапазона обнаружения зеркала бокового вида; и
передают ответ в первое транспортное средство с согласием на участие в проверке зеркала бокового вида по меньшей мере частично на основе определения того, что второе транспортное средство находится в диапазоне обнаружения зеркала бокового вида.
4. Способ по п. 3, при котором дополнительно определяют перед передачей ответа в первое транспортное средство то, что второе транспортное средство останется в диапазоне обнаружения зеркала бокового вида в течение заданного периода времени.
5. Способ по п. 3, при котором дополнительно запрашивают участие первого транспортного средства во второй проверке зеркала бокового вида на втором транспортном средстве.
6. Способ по п. 1, при котором дополнительно регулируют направление датчика на втором транспортном средстве для центрирования зеркала бокового вида на первом изображении перед захватом первого изображения.
7. Способ по п. 1, при котором дополнительно определяют по меньшей мере частично на основе определения того, что разница между интенсивностью света сигнального индикатора, связанного с зеркалом бокового вида, на первом изображении и интенсивностью света сигнального индикатора, связанного с зеркалом бокового вида, на втором изображении превышает пороговое значение, что зеркало бокового вида может быть развернуто в каждое из первого и второго положений.
8. Способ по п. 1, при котором первое положение представляет собой выдвинутое положение, а второе положение представляет собой убранное положение, при этом дополнительно:
определяют то, что второе транспортное средство находится перед первым транспортным средством; и
определяют по меньшей мере частично на основе определения того, что интенсивность света сигнального индикатора, связанного с зеркалом бокового вида, на первом изображении превышает интенсивность света сигнального индикатора, связанного с зеркалом бокового вида, на втором изображении, что зеркало бокового вида может быть развернуто в каждое из первого и второго положений.
9. Компьютер, содержащий процессор и память, хранящую инструкции, выполняемые процессором таким образом, что компьютер второго транспортного средства запрограммирован с возможностью:
захвата первого изображения развернутого в первое положение зеркала бокового вида первого транспортного средства, эксплуатируемого в автономном режиме, причем второе транспортное средство находится в пределах диапазона обнаружения зеркала бокового вида первого транспортного средства;
захвата второго изображения зеркала бокового вида, развернутого во второе положение;
анализа первого и второго изображений для определения рабочего состояния зеркала бокового вида;
проверки того, является ли рабочее состояние зеркала бокового вида одним из: (1) застряло в первом положении; (2) застряло во втором положении; (3) застряло между первым и вторым положениями и (4) может быть развернуто в каждое из первого и второго положений; и
передачи рабочего состояния на дисплей и/или удаленное вычислительное устройство.
10. Компьютер по п. 9, дополнительно запрограммированный с возможностью:
приема во втором транспортном средстве первого запроса от первого транспортного средства на захват первого изображения; и
приема во втором транспортном средстве второго запроса от первого транспортного средства на захват второго изображения.
11. Компьютер по п. 9, дополнительно запрограммированный с возможностью:
приема перед захватом первого изображения запроса на участие в проверке зеркала бокового вида;
определения того, что второе транспортное средство находится в пределах диапазона обнаружения зеркала бокового вида; и
передачи ответа в первое транспортное средство с согласием на участие в проверке зеркала бокового вида по меньшей мере частично на основе определения того, что второе транспортное средство находится в диапазоне обнаружения зеркала бокового вида.
12. Компьютер по п. 11, дополнительно запрограммированный с возможностью определения перед передачей ответа в первое транспортное средство того, что второе транспортное средство останется в диапазоне обнаружения зеркала бокового вида в течение заданного периода времени.
13. Компьютер по п. 11, дополнительно запрограммированный с возможностью запроса участия первого транспортного средства во второй проверке зеркала бокового вида на втором транспортном средстве.
14. Компьютер по п. 9, дополнительно запрограммированный с возможностью регулировки направления датчика на втором транспортном средстве для центрирования зеркала бокового вида на первом изображении перед захватом первого изображения.
15. Компьютер по п. 9, дополнительно запрограммированный с возможностью определения по меньшей мере частично на основе определения того, что разница между интенсивностью света сигнального индикатора, связанного с зеркалом бокового вида, на первом изображении и интенсивностью света сигнального индикатора, связанного с зеркалом бокового вида, на втором изображении превышает пороговое значение, что зеркало бокового вида может быть развернуто в каждое из первого и второго положений.
16. Компьютер по п. 9, в котором первое положение представляет собой выдвинутое положение, а второе положение представляет собой убранное положение, при этом компьютер дополнительно запрограммирован с возможностью:
определения того, что второе транспортное средство находится перед первым транспортным средством; и
определения по меньшей мере частично на основе определения того, что интенсивность света сигнального индикатора, связанного с зеркалом бокового вида, на первом изображении превышает интенсивность света сигнального индикатора, связанного с зеркалом бокового вида, на втором изображении, что зеркало бокового вида может быть развернуто в каждое из первого и второго положений.
| US 9449390 B1, 20.09.2016 | |||
| US 2004196368 A1, 07.10.2004 | |||
| JP 2012214083 A, 08.11.2012. |

