Уровень техники
[0001] В контексте автомобильных транспортных средств слепая зона означает область относительно транспортного средства-носителя, наблюдение за которой является затруднительным для водителя. Обычно слепая зона находится рядом с транспортным средством-носителем и в направлении его задней стороны. Эта слепая зона иногда называется слепой зоной в задней четверти. Наблюдение транспортных средств в слепой зоне в задней четверти зачастую требует от водителя физически поворачивать голову, тело или и то, и другое. Наблюдение за слепой зоной является функцией транспортного средства, которая пытается информировать водителей, когда предполагается, что в слепой зоне в задней четверти транспортного средства-носителя находится целевое транспортное средство.
Краткое описание чертежей
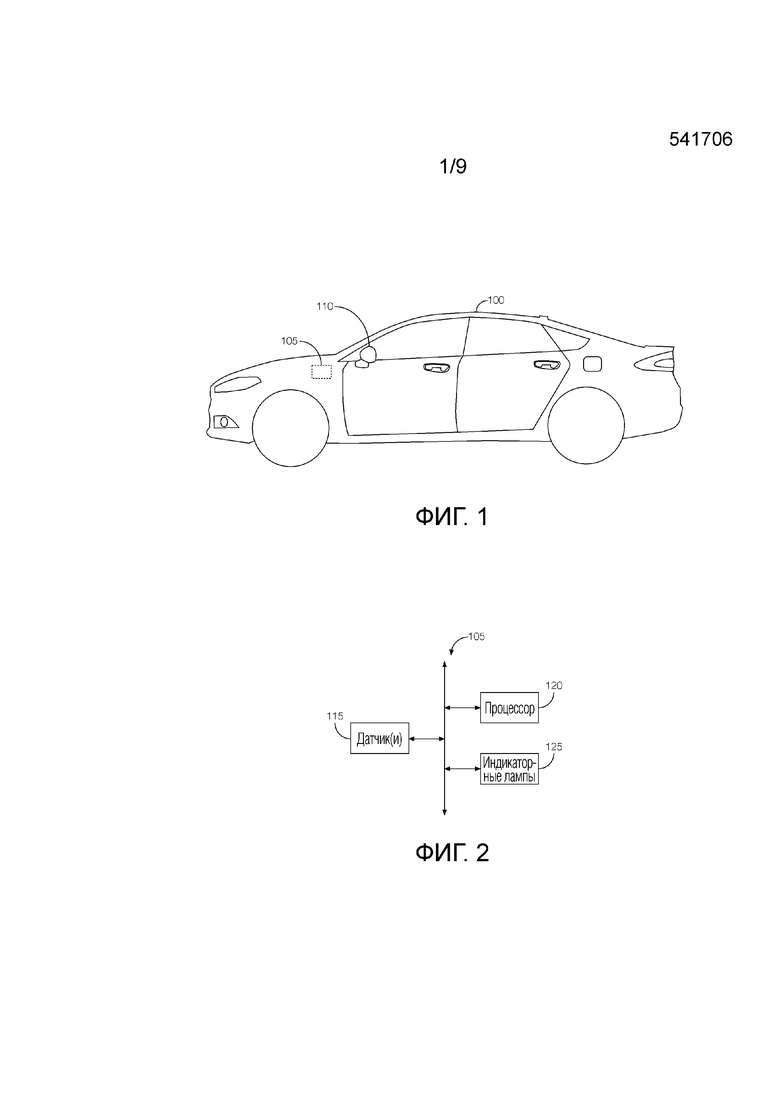
[0002] Фиг. 1 иллюстрирует примерное транспортное средство-носитель с системой обнаружения в слепой зоне в отдалённой полосе движения.
[0003] Фиг. 2 иллюстрирует примерные компоненты системы обнаружения в слепой зоне в отдалённой полосе движения.
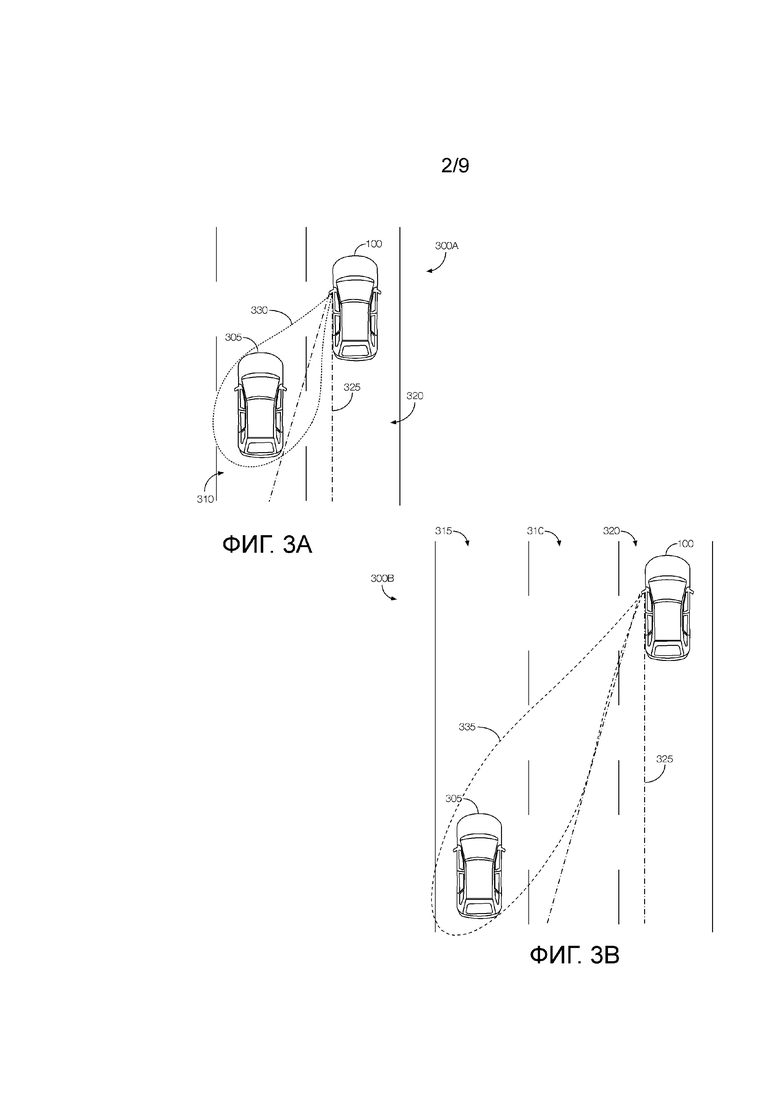
[0004] Фиг. 3A-3F иллюстрируют примерные сценарии, когда система обнаружения в слепой зоне в отдалённой полосе движения может предупреждать водителя о различных целевых транспортных средствах в слепой зоне транспортного средства-носителя.
[0005] Фиг. 4A-4В иллюстрируют примерные боковые зеркала заднего вида с множеством индикаторных ламп, освещаемых в соответствии с различными сценариями.
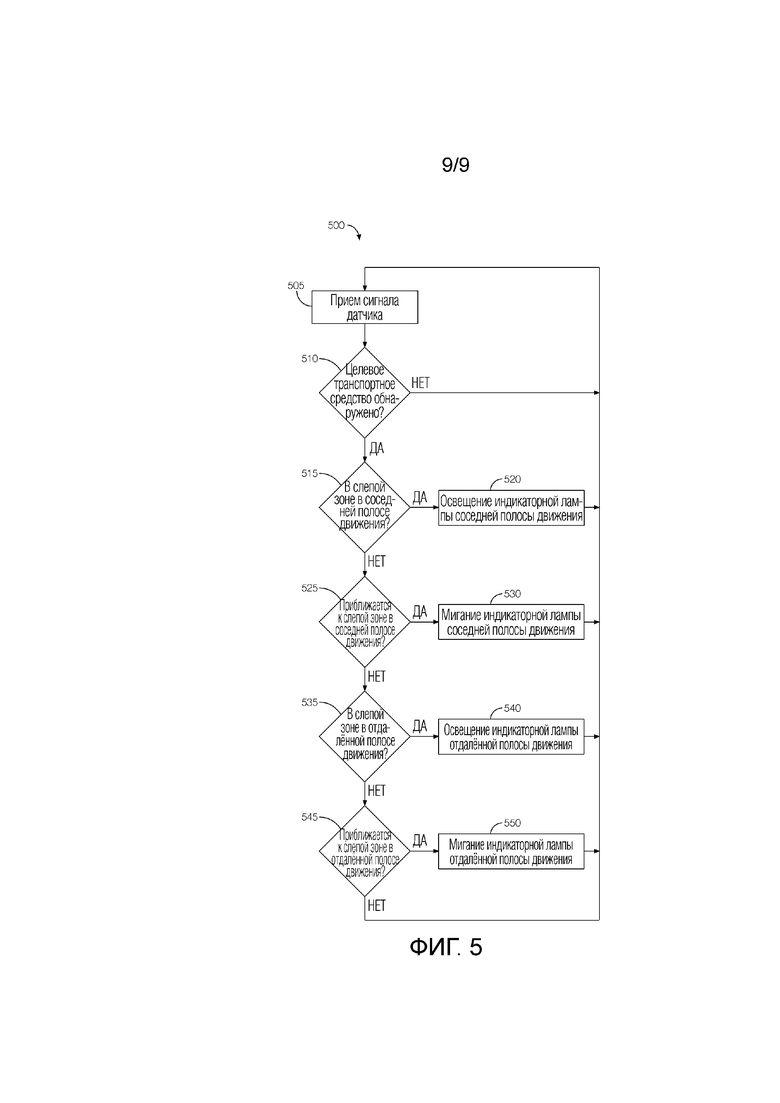
[0006] Фиг. 5 - это блок-схема примерного процесса, который может быть выполнен посредством системы обнаружения в слепой зоне в отдалённой полосе движения.
Осуществление изобретения
[0007] Динамичная природа транспортных средств делает обнаружение в слепой зоне затруднительным. Перед выполнением смены полосы движения водитель смотрит через плечо в поисках транспортного средства в слепой зоне в задней четверти. Если транспортное средство не присутствует, водитель может завершить смену полосы движения. Если транспортное средство там есть, водитель должен будет ожидать, чтобы завершить смену полосы движения, пока слепая зона в задней четверти не станет свободной. В качестве альтернативы, водитель может ускорять или замедлять транспортное средство, чтобы способствовать освобождению слепой зоны в задней четверти.
[0008] Может возникать ситуация, когда водитель проверяет слепую зону в задней четверти и начинает выполнять смену полосы движения без осознания того, что быстро приближается транспортное средство. Таким образом, приближающееся транспортное средство может войти в слепую зону в задней четверти между временем, которое занимает у водителя проверка слепой зоны в задней четверти, и временем, чтобы водитель завершил смену полосы движения. Кроме того, многие водители зачастую проверяют только слепую зону в задней четверти в соседней полосе движения. Они могут не осознавать, что транспортное средство находится в слепой зоне в задней четверти в отдалённой полосе движения (например, через две полосы движения). Это может быть проблемой, если оба транспортных средства пытаются переместиться на одну и ту же полосу движения в одно и то же время.
[0009] Примерная система обнаружения в слепой зоне в отдалённой полосе движения включает в себя по меньшей мере один датчик, который обнаруживает первое целевое транспортное средство в первой слепой зоне и второе целевое транспортное средство во второй слепой зоне. Первая слепая зона ассоциирована с соседней полосой относительно транспортного средства-носителя, а вторая слепая зона ассоциирована с отдалённой полосой относительно транспортного средства-носителя. Процессор формирует первый предупреждающий сигнал при обнаружении первого целевого транспортного средства и второй предупреждающий сигнал при обнаружении второго целевого транспортного средства.
[0010] Система обнаружения в слепой зоне в отдалённой полосе движения может обнаруживать транспортные средства на соседней полосе и в отдалённой полосе и информировать водителя транспортного средства-носителя, когда такие другие транспортные средства присутствуют. Уведомления посредством системы обнаружения в слепой зоне в отдалённой полосе движения могут служить в качестве резервного средства для ситуации, когда водитель ищет через плечо транспортные средства в слепой зоне в задней четверти на соседней полосе движения, отдалённой полосе движения или на обеих полосах движения, а также помогать водителю при приёме решения о том, когда следует начинать смену полосы движения, следует ли завершить смену полосы движения или прекратить смену полосы движения, например, переместившись обратно на предыдущую полосу движения.
[0011] Показанные элементы могут принимать многие различные формы и включать в себя множество компонентов и приспособлений и/или альтернативные компоненты и приспособления. Примерные иллюстрированные компоненты не предназначены для ограничения. Фактически, могут быть использованы дополнительные или альтернативные компоненты и/или реализации. Кроме того, показанные элементы не обязательно показаны в масштабе, если это не указано в явном виде.
[0012] Как показано на фиг. 1, транспортное средство-носитель 100 включает в себя систему 105 обнаружения в слепой зоне в отдалённой полосе движения, которая может обнаруживать целевые транспортные средства в слепой зоне в соседней полосе движения (иногда называемой «слепой зоной в задней четверти») и в слепой зоне в отдалённой полосе движения. Термины «текущий», «соседний» и «отдалённый» относятся к местоположению транспортного средства-носителя 100. «Текущая полоса движения» - это полоса движения, по которой движется транспортное средство-носитель 100. «Соседняя полоса движения» - это полоса движения непосредственно рядом с текущей полосой движения. Она может также означать полосу движения, которая в конечном итоге сливается с текущей полосой движения, например, когда текущая полоса движения является въездом на автомагистраль. «Отдалённая полоса движения» является второй или более по счёту полосой от текущей полосы движения. Таким образом, соседняя полоса движения может находиться между текущей полосой движения и отдалённой полосой движения.
[0013] Соседняя полоса движения, отдалённая полоса движения, или обе полосы движения, могут находить слева или справа от транспортного средства-носителя 100. На проезжей части с двумя полосами движения имеется одна текущая полоса движения и одна соседняя полоса движения. На проезжей части с тремя полосами движения существует одна текущая полоса движения и либо две соседние полосы движения (если текущая полоса движения находится посредине), либо одна соседняя и одна отдалённая полоса движения (если текущая полоса движения является крайней левой или крайней правой полосой движения). На проезжей части с более чем тремя полосами движения существует одна текущая полоса движения, одна или две соседние полосы движения (в зависимости от того, является ли текущая полоса движения самой левой, самой правой или одной из центральных полос) и одна или более смежных с соседней полосой полос движения.
[0014] Система 105 обнаружения в слепой зоне в отдалённой полосе движения обнаруживает целевые транспортные средства в слепых зонах соседней и отдалённой полос движения. Она также предупреждает водителя, когда такие целевые транспортные средства обнаруживаются. Предупреждение может быть представлено звуковым образом, визуально или обоими способами. Звуковое предупреждение включает в себя тонально-модулированный сигнал или другой шумовой звук, воспроизводимый внутри пассажирского салона транспортного средства-носителя 100. Визуальное предупреждение включает в себя освещение соответствующих индикаторных ламп, расположенных в боковом зеркале 110 заднего вида.
[0015] Система 105 обнаружения в слепой зоне в отдалённой полосе движения может дополнительно обнаруживать, когда целевое транспортное средство быстро приближается к слепой зоне на соседней или отдалённой полосе движения, и может формировать предупреждающие сигналы в таких сценариях. Предупреждения, формируемые, когда целевое транспортное средство быстро приближается к одной из слепых зон, могут включать в себя различный звук внутри пассажирского салона, мигание соответствующих индикаторных ламп или свечение соответствующих индикаторных ламп с помощью цвета, отличного от того, если целевое транспортное средство уже находится в одной из слепых зон.
[0016] Хотя оно показано в виде седана, транспортное средство-носитель 100 может включать в себя любое пассажирское или коммерческое транспортное средство, такое как легковой автомобиль, грузовик, внедорожник, кроссовер, фургон, минивэн, такси, автобус и т.д. В некоторых возможных подходах транспортное средство-носитель 100 является автономным транспортным средством, которое работает в автономном (например, без водителя) режиме, частично автономном режиме и/или неавтономном режиме.
[0017] Обращаясь теперь к фиг. 2, система 105 обнаружения в слепой зоне в отдалённой полосе движения включает в себя датчики 115, процессор 120 и индикаторные лампы 125A.
[0018] Датчики 115 включают в себя электронные компоненты, которые обнаруживают целевые транспортные средства на соседней полосе, отдалённой полосе или обеих. Примеры датчиков 115 могут включать в себя радарный датчик, лидарный датчик, визуальный датчик (например, камеру), ультразвуковой датчик и т.д. Система 105 обнаружения в слепой зоне в отдалённой полосе движения может включать в себя любое число датчиков 115, и датчики 115 могут быть одинакового или различных типов. Например, визуальный датчик или ультразвуковой датчик могут быть использованы для обнаружения целевых транспортных средств на соседней полосе, в то время как радарный или лидарный датчик может быть использован для обнаружения целевых транспортных средств на отдалённой полосе. Некоторые датчики 115 могут также или в качестве альтернативы быть использованы для обнаружения целевых транспортных средств, приближающихся к одной из слепых зон. Датчики 115 могут быть размещены в различных местоположениях относительно транспортного средства-носителя 100. Датчики 115 могут быть встроены, например, в одно из боковых зеркал 110 заднего вида или на заднем бампере. В некоторых возможных подходах боковое зеркало 110 заднего вида может быть устранено совсем и заменено полостью датчиком 115. Также, различные датчики 115 могут быть использованы для обнаружения целевых транспортных средств с различных сторон от транспортного средства-носителя 100. Т.е. один или более датчиков 115 могут быть использованы для обнаружения целевых транспортных средств с водительской стороны, и один или более датчиков 115 могут быть использованы для обнаружения целевых транспортных средств с пассажирской стороны.
[0019] Каждый датчик 115 запрограммирован для вывода сигнала обнаружения, указывающего, обнаружено ли целевое транспортное средство. Сигнал обнаружения может указывать, что целевое транспортное средство находится в области, охватываемой датчиком 115. Таким образом, датчик 115, охватывающий слепую зону в соседней полосе движения, выводит сигнал обнаружения, когда целевое транспортное средство обнаружено на соседней полосе. Аналогично, датчик 115, охватывающий слепую зону в отдалённой полосе движения, выводит сигнал обнаружения, когда целевое транспортное средство обнаружено на отдалённой полосе. Сигналы обнаружения выводятся процессору 120.
[0020] Кроме того, датчики 115 могут выводить сигналы обнаружения, указывающие, что целевое транспортное средство приближается к одной из слепых зон. Такие датчики 115 могут быть одинаковыми или различными датчиками 115, используемыми для обнаружения, когда целевые транспортные средства фактически находятся в слепой зоне. Кроме того, сигналы обнаружения, сформированные в ответ на целевое транспортное средство, приближающееся к одной из слепых зон, могут быть выведены процессору 120. Обнаружение целевого транспортного средства, движущегося по направлению к одной из слепых зон, может включать в себя ситуации, когда целевое транспортное средство пытается выполнять маневр смены полосы движения, который, когда завершен, переместит целевое транспортное средство в одну из слепых зон транспортного средства-носителя 100.
[0021] Процессор 120 включает в себя электронные компоненты, включающие в себя любое множество схем, которые обрабатывают сигналы обнаружения, выводимые датчиками 115, и выводит предупреждающие сигналы в соответствии с принятыми сигналами обнаружения. Процессор 120 принимает сигнал обнаружения, выводимый датчиком 115, определяет, где целевое транспортное средство обнаружено, и формирует соответствующий предупреждающий сигнал. Процессор 120 определяет, где целевое транспортное средство обнаружено, на основе датчика 115, который выводит сигнал обнаружения. Например, если датчик 115, который выводит сигнал обнаружения, ищет целевые транспортные средства в слепой зоне в соседней полосе движения с водительской стороны транспортного средства-носителя 100, процессор 120 может определять, что целевое транспортное средство находится в слепой зоне в соседней полосе движения с водительской стороны транспортного средства-носителя 100. Если датчик 115, который выводит сигнал обнаружения, ищет целевые транспортные средства в слепой зоне в отдалённой полосе движения с водительской стороны транспортного средства-носителя 100, процессор 120 может определять, что целевое транспортное средство находится в слепой зоне в отдалённой полосе движения с водительской стороны транспортного средства-носителя 100. Если датчик 115, который выводит сигнал обнаружения, ищет целевые транспортные средства в слепой зоне в соседней полосе движения с пассажирской стороны транспортного средства-носителя 100, процессор 120 может определять, что целевое транспортное средство находится в слепой зоне в соседней полосе движения с пассажирской стороны транспортного средства-носителя 100. Если датчик 115, который выводит сигнал обнаружения, ищет целевые транспортные средства в слепой зоне в отдалённой полосе движения с пассажирской стороны транспортного средства-носителя 100, процессор 120 может определять, что целевое транспортное средство находится в слепой зоне в отдалённой полосе движения с пассажирской стороны транспортного средства-носителя 100. Процессор 120 может формировать и выводить предупреждающие сигналы, представляющие любой один из этих и других сценариев.
[0022] Помимо просто определения того, находится ли целевое транспортное средство в слепой зоне, процессор 120 может быть запрограммирован для обнаружения целевых транспортных средств, быстро приближающихся к одной из слепых зон. Т.е. процессор 120 может определять, выше ли скорость приближающегося целевого транспортного средства заданной скорости относительно транспортного средства-носителя 100. Если так, целевое транспортное средство вероятно должно догонять транспортное средство-носитель 100, что означает, что целевое транспортное средство будет в одной из слепых зон транспортного средства-носителя 100 в некоторый момент времени относительно скоро. Процессор 120 может формировать предупреждающие сигналы для предупреждения водителя транспортного средства-носителя 100 о таких случаях.
[0023] Обнаружение быстро приближающихся транспортных средств может быть обработано посредством тех же датчиков 115, что и описанные выше. В качестве альтернативы, процессор 120 может обнаруживать быстро приближающиеся транспортные средства другими способами, такими как, например, через протокол связи «транспортное средство - транспортное средство» или «транспортное средство – инфраструктура» типа протокола специализированной связи ближнего действия (DSRC). Целевое транспортное средство может сообщать свою скорость и направление движения, непосредственно или опосредованно, транспортному средству-носителю 100. В качестве альтернативы, транспортное средство-носитель 100 может принимать скорость и направление движения от других соседних транспортных средств или устройств инфраструктуры, которые обнаружили целевое транспортное средство и беспроводным образом передали сигналы обнаружения транспортному средству-носителю 100.
[0024] Процессор 120 может определять скорость транспортного средства-носителя 100 и сравнивать скорость с заданной скоростью относительно скорости транспортного средства-носителя 100. Заданная скорость относительно скорости транспортного средства-носителя 100 может включать в себя, например, на 5 миль/ч быстрее транспортного средства-носителя 100, на 10 миль/ч быстрее транспортного средства-носителя 100, на 20 миль/ч быстрее транспортного средства-носителя 100 и т.д. Если процессор 120 определяет, что целевое транспортное средство быстро приближается к слепой зоне в соседней полосе движения с водительской стороны транспортного средства-носителя 100, процессор 120 может определять, что целевое транспортное средство намеревается въехать в слепую зону в соседней полосе движения с водительской стороны транспортного средства-носителя 100. Если процессор 120 определяет, что целевое транспортное средство быстро приближается к слепой зоне в отдалённой полосе движения с водительской стороны транспортного средства-носителя 100, процессор 120 может определять, что целевое транспортное средство намеревается въехать в слепую зону в отдалённой полосе движения с водительской стороны транспортного средства-носителя 100. Если процессор 120 определяет, что целевое транспортное средство быстро приближается к слепой зоне в соседней полосе движения с пассажирской стороны транспортного средства-носителя 100, процессор 120 может определять, что целевое транспортное средство намеревается въехать в слепую зону в соседней полосе движения с пассажирской стороны транспортного средства-носителя 100. Если процессор 120 определяет, что целевое транспортное средство быстро приближается к слепой зоне в отдалённой полосе движения с пассажирской стороны транспортного средства-носителя 100, процессор 120 может определять, что целевое транспортное средство намеревается въехать в слепую зону в отдалённой полосе движения с пассажирской стороны транспортного средства-носителя 100. Процессор 120 может формировать и выводить предупреждающие сигналы, представляющие любой из этих или других сценариев.
[0025] Предупреждающие сигналы, формируемые процессором 120, могут быть выведены конкретным индикаторным лампам 125A, также как и другим системам транспортного средства. Предупреждающие сигналы, выводимые процессором 120, могут побуждать одну или более индикаторных ламп 125A мигать или светиться. Кроме того, предупреждающие сигналы могут побуждать информационно-развлекательную систему внутри пассажирского салона транспортного средства-носителя 100 представлять звуковое предупреждение, указывающее присутствие и местоположение целевого транспортного средства в одной из слепых зон.
[0026] Индикаторные лампы 125A могут включать в себя любое число электронных компонентов, которые могут освещаться в ответ на прием предупреждающего сигнала от процессора 120. Осветительные лампы могут быть встроены в боковые зеркала 110 заднего вида водительской и пассажирской стороны как с водительской, так и с пассажирской стороны. Например, как показано на фиг. 4A-4D, каждое боковое зеркало 110 заднего вида включает в себя две индикаторных лампы 125A, одна для указания целевых транспортных средств на или быстро приближающихся к соседней полосе и одна для указания целевых транспортных средств на или быстро приближающихся к отдалённой полосе. Индикаторные лампы 125A могут, каждая, работать в различных режимах в зависимости от типа принятого предупреждающего сигнала. Например, индикаторная лампа 125 может оставаться освещенной (установившееся состояние), когда целевое транспортное средство обнаружено в соответствующей слепой зоне. Индикаторная лампа 125 может мигать, когда обнаружено целевое транспортное средство, быстро приближающееся к соответствующей слепой зоне. В качестве альтернативы или дополнения, индикаторная лампа 125 может светить одним цветом, когда целевое транспортное средство обнаружено в соответствующей слепой зоне, и другим цветом, когда целевое транспортное средство быстро приближается к соответствующей слепой зоне. Предупреждающий сигнал, выводимый процессором 120, может означать либо то, что индикаторная лампа 125 должна включаться, мигать, либо светиться конкретным цветом. Таким образом, посредством света, с которым индикаторные лампы 125A светятся, и того, мигают ли индикаторные лампы 125A или светятся конкретным цветом, водитель транспортного средства-носителя 100 будет знать, было ли целевое транспортное средство обнаружено в одной из слепых зон, и если так, слепую зону, в которой целевое транспортное средство было обнаружено. Водитель будет также знать, было ли обнаружено целевое транспортное средство, быстро приближающееся к одной из слепых зон.
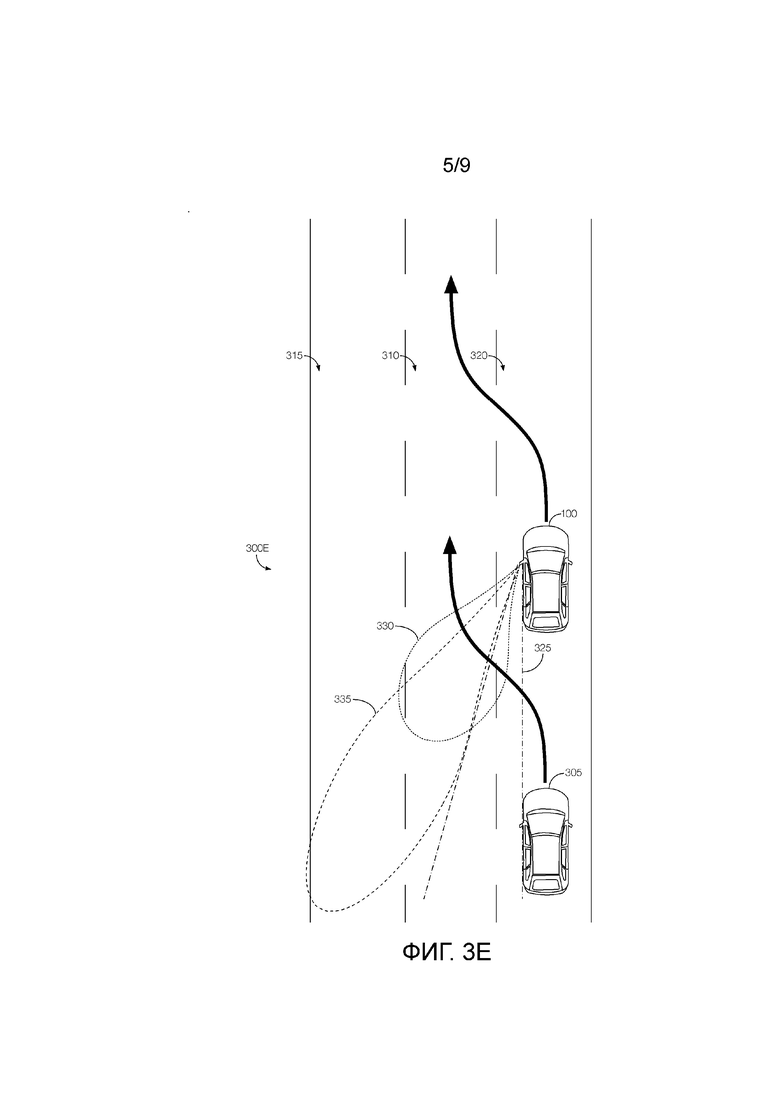
[0027] Фиг. 3A-3F иллюстрируют примерные сценарии 300, когда система 105 обнаружения в слепой зоне в отдалённой полосе движения может предупреждать водителя о различных целевых транспортных средствах в слепой зоне транспортного средства-носителя 100. Сценарии 300 иллюстрируют различные размещения целевого транспортного средства 305 относительно транспортного средства-носителя 100 и примерные размещения примерной соседней полосы движения 310, примерной отдалённой полосы движения 315 или обеих относительно транспортного средства-носителя 100 на текущей полосе 320. Кроме того, в целях иллюстрации, также показаны поле обзора 325 через боковое зеркало 110 заднего вида, слепая зона 330 в соседней полосе движения, которая наблюдается посредством одного датчика 115, слепая зона 335 в отдалённой полосе движения, которая наблюдается посредством того же или другого датчика 115.
[0028] Фиг. 3A иллюстрирует сценарий 300A, когда целевое транспортное средство 305 находится в слепой зоне в соседней полосе движения (т.е. слепой зоне в задней четверти) относительно транспортного средства-носителя 100. Транспортное средство-носитель 100 находится на текущей полосе 320, и в этом примерном сценарии 300A соседняя полоса движения 310 находится с водительской стороны транспортного средства-носителя 100. Для этого сценария 300A система 105 обнаружения в слепой зоне в отдалённой полосе движения может освещать одну из индикаторных ламп 125A, указывающую, что целевое транспортное средство 305 находится в слепой зоне 330 в соседней полосе движения.
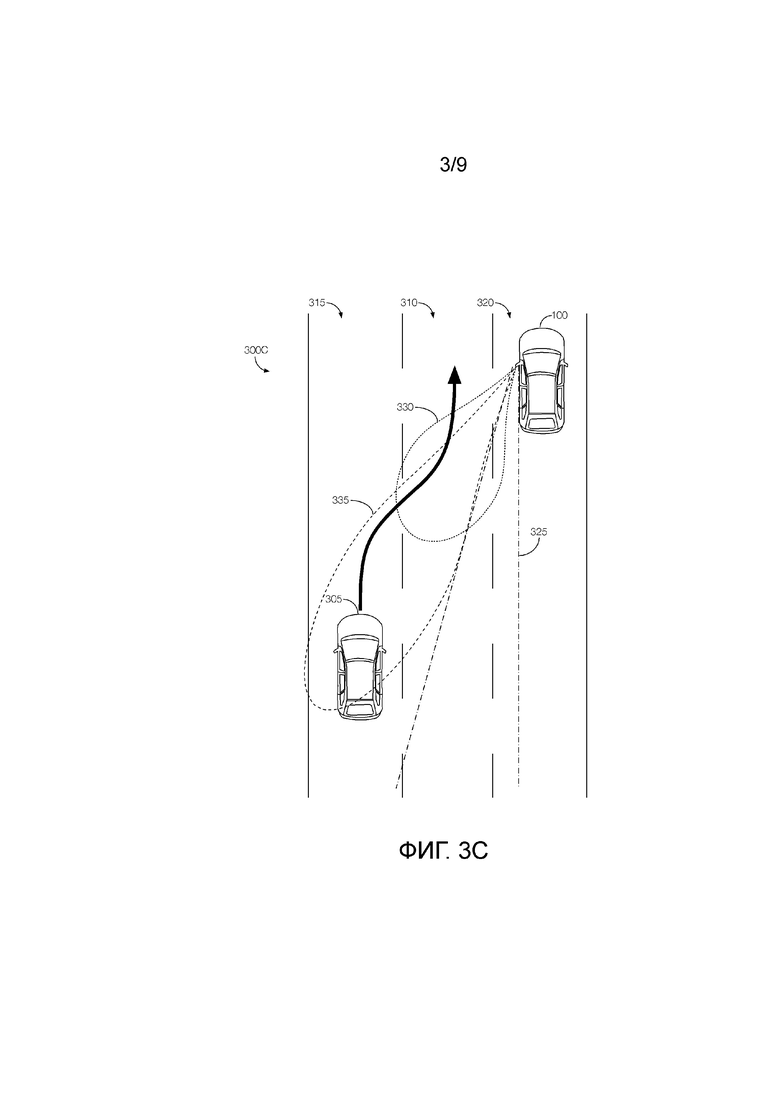
[0029] Фиг. 3B и 3C иллюстрируют сценарии 300B-C, когда целевое транспортное средство 305 находится на отдалённой полосе 315 относительно транспортного средства-носителя 100. Отдалённая полоса движения 315 в сценариях 300B-C находится через две полосы движения от текущей полосы движения 320 с водительской стороны, с соседней полосой 310 между текущей полосой 320 и отдалённой полосой 315. Для сценария 300B система 105 обнаружения в слепой зоне в отдалённой полосе движения может освещать одну из индикаторных ламп 125A, указывающую, что целевое транспортное средство 305 находится в слепой зоне 335 в отдалённой полосе движения. То же самое справедливо по меньшей мере изначально для сценария 300C. Т.е. изначально одна из индикаторных ламп 125A освещается, указывая, что целевое транспортное средство 305 находится в слепой зоне 335 в отдалённой полосе движения. Система 105 обнаружения в слепой зоне в отдалённой полосе движения может, как описано выше, определять, что целевое транспортное средство 305 быстро движется по направлению к слепой зоне 330 в соседней полосе движения, в то же время выполняя маневр смены полосы движения. Таким образом, система 105 обнаружения в слепой зоне в отдалённой полосе движения может мигать соответствующей индикаторной лампой 125 для предупреждения водителя транспортного средства-носителя 100 о том, что целевое транспортное средство 305 движется по направлению к слепой зоне 330 в соседней полосе движения. Эта индикаторная лампа 125 может мигать, в то время как индикаторная лампа 125, ассоциированная со слепой зоной 335 в отдалённой полосе движения, остается освещенной по меньшей мере до тех пор, пока целевое транспортное средство 305 больше не будет в слепой зоне 335 в отдалённой полосе движения (например, маневр смены полос движения завершен).
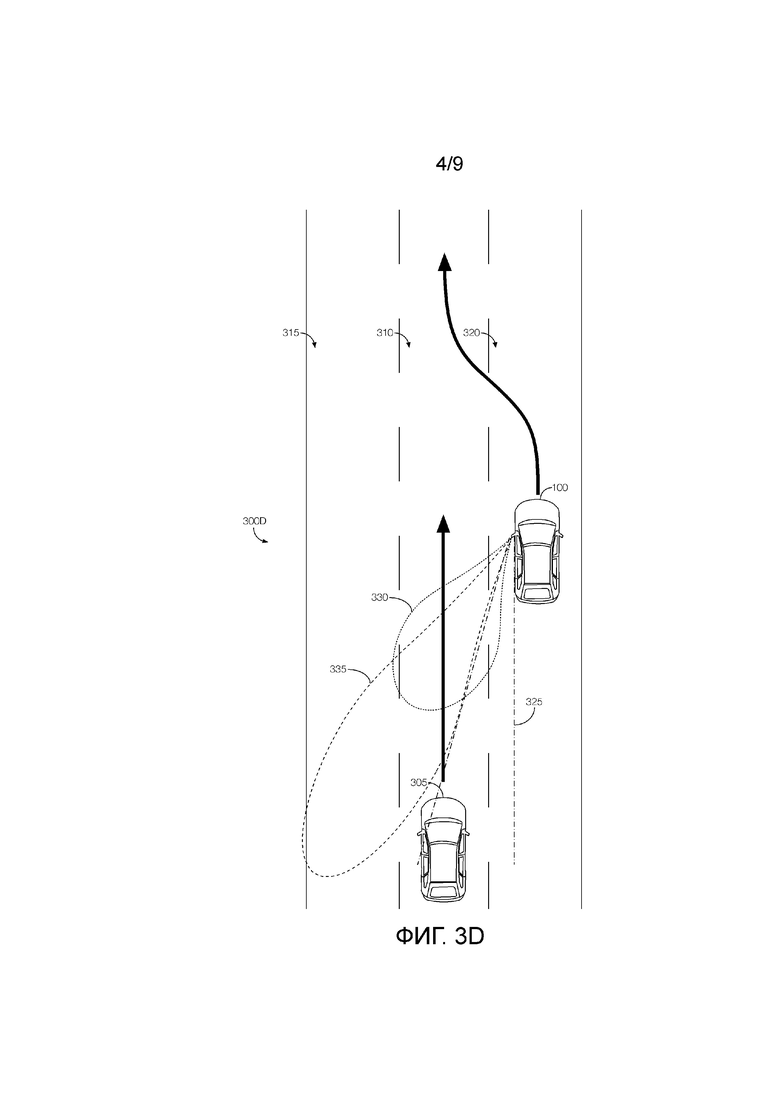
[0030] Фиг. 3D иллюстрирует сценарий 300D, когда целевое транспортное средство 305 находится на соседней полосе 310 и быстро приближается, но еще не находится внутри, к слепой зоне 330 в соседней полосе движения. Иногда это не является проблемой, особенно если целевое транспортное средство 305 движется, быстро проезжая транспортное средство-носитель 100. Как показано в сценарии 300D, однако, водитель рассматриваемого транспортного средства 100 хочет выполнить смену полосы движения. Водитель может не быть способен сказать, как быстро целевое транспортное средство 305 движется. Таким образом, водитель рассматриваемого транспортного средства 100 может не осознавать, что целевое транспортное средство 305 может быть в слепой зоне 330 в соседней полосе движения, когда рассматриваемое транспортное средство 100 начинает двигаться на соседнюю полосу 310. В этом сценарии 300D система 105 обнаружения в слепой зоне в отдалённой полосе движения может мигать индикаторной лампой 125, ассоциированной со слепой зоной 330 в соседней полосе движения, для предупреждения водителя транспортного средства-носителя 100 о том, что целевое транспортное средство намеревается войти в слепую зону 330 в соседней полосе движения.
[0031] Фиг. 3E иллюстрирует сценарий 300E, когда целевое транспортное средство 305 и транспортное средство-носитель 100 изначально находятся на одной полосе движения (т.е. текущей полосе 320), но целевое транспортное средство 305 перемещается на соседнюю полосу 310. В некоторый момент, в то время как целевое транспортное средство 305 перемещается на соседнюю полосу 310, система 105 обнаружения в слепой зоне в отдалённой полосе движения может обнаруживать целевое транспортное средство 305 на соседней полосе, что сделает этот сценарий 300E аналогичным сценарию 300D, описанному выше относительно фиг. 3D.
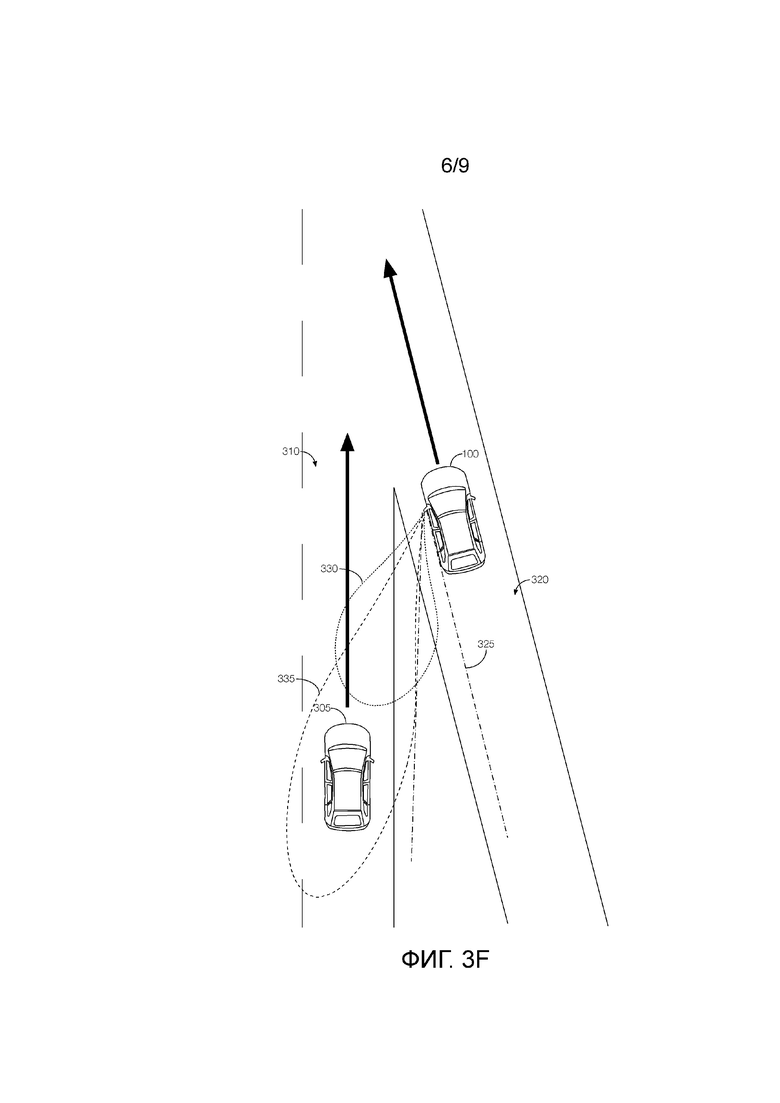
[0032] Фиг. 3F иллюстрирует сценарий 300F, когда текущая полоса движения 320 является наклонным въездом на автомагистраль или иначе отделена от, но в конечном счете станет частью, соседней полосы движения 310. Как показано, целевое транспортное средство 305 находится в слепой зоне 335 в отдалённой полосе движения транспортного средства-носителя 100. Таким образом, индикаторная лампа 125, ассоциированная со слепой зоной 335 в отдалённой полосе движения, может освещаться для предупреждения водителя транспортного средства-носителя 100 о том, что целевое транспортное средство 305 находится рядом. Кроме того, если целевое транспортное средство 305 быстро приближается к слепой зоне 330 в соседней полосе движения, система 105 обнаружения в слепой зоне в отдалённой полосе движения может дополнительно мигать индикаторной лампой 125, ассоциированной со слепой зоной 330 в соседней полосе движения, для предупреждения водителя транспортного средства-носителя 100 о том, что целевое транспортное средство быстро движется по направлению к слепой зоне 330 в соседней полосе движения, чтобы помочь водителю избежать потенциального столкновения, когда полосы движения в конечном счете сливаются.
[0033] Для каждого из сценариев 300A-F, в дополнение к освещению индикаторных ламп 125A, система 105 обнаружения в слепой зоне в отдалённой полосе движения может дополнительно формировать звуковые предупреждения внутри пассажирского салона транспортного средства-носителя 100. Звуковые предупреждения могут указывать конкретный сценарий 300 (например, находится ли целевое транспортное средство 305 в или приближается к одной из слепых зон, и если так, звуковое предупреждение может идентифицировать, какая слепая зона, и с какой стороны транспортного средства-носителя 100 является предметом тревоги).
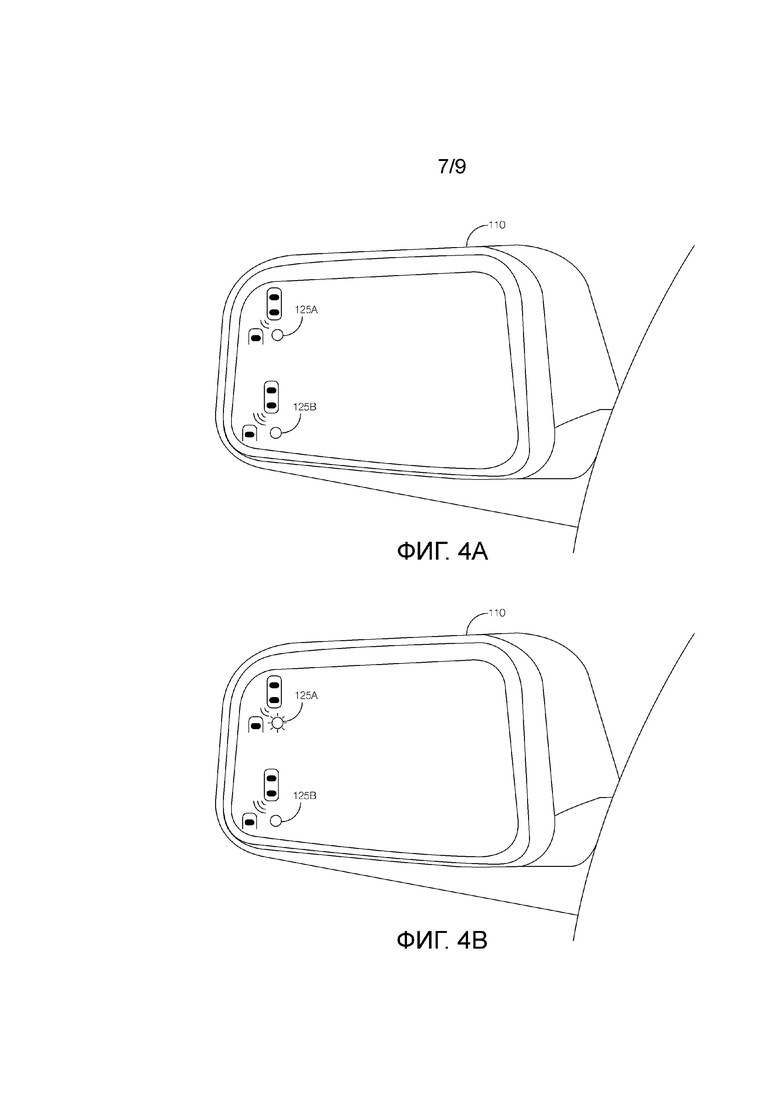
[0034] Фиг. 4A-4D иллюстрируют примерные боковые зеркала 110 заднего вида с множеством индикаторных ламп 125A, освещаемых в соответствии с различными сценариями 300. Каждое показанное боковое зеркало 110 заднего вида оборудовано двумя индикаторными лампами 125A. Первая индикаторная лампа 125A может быть использована для предупреждения водителя транспортного средства-носителя 100 о проблемах, ассоциированных со слепой зоной соседней полосы движения, а вторые индикаторные лампы 125B могут быть использованы для предупреждения водителя транспортного средства-носителя 100 о проблемах, ассоциированных со слепой зоной отдалённой полосы движения. Кроме того, хотя это показано в виде бокового зеркала 110 заднего вида с водительской стороны, аналогичные индикаторные лампы 125A могут быть встроены в боковое зеркало заднего вида с пассажирской стороны.
[0035] На фиг. 4A ни первая индикаторная лампа 125A, ни вторая индикаторная лампа 125B не освещаются, означая, что целевые транспортные средства не обнаружены либо в слепой зоне в соседней полосе движения, либо слепой зоне в отдалённой полосе движения. Кроме того, ни первая индикаторная лампа 125A, ни вторая индикаторная лампа 125B не мигают, означая, что целевые транспортные средства не были обнаружены быстро приближающимися к слепой зоне в соседней полосе движения или слепой зоне в отдалённой полосе движения.
[0036] На фиг. 4B первые индикаторные лампы 125A освещаются или мигают. Они будут освещаться, если система 105 обнаружения в слепой зоне в отдалённой полосе движения обнаруживает целевое транспортное средство в слепой зоне в соседней полосе движения. Они будут мигать, если система 105 обнаружения в слепой зоне в отдалённой полосе движения обнаруживает целевое транспортное средство, движущееся быстро по направлению к слепой зоне в соседней полосе движения.
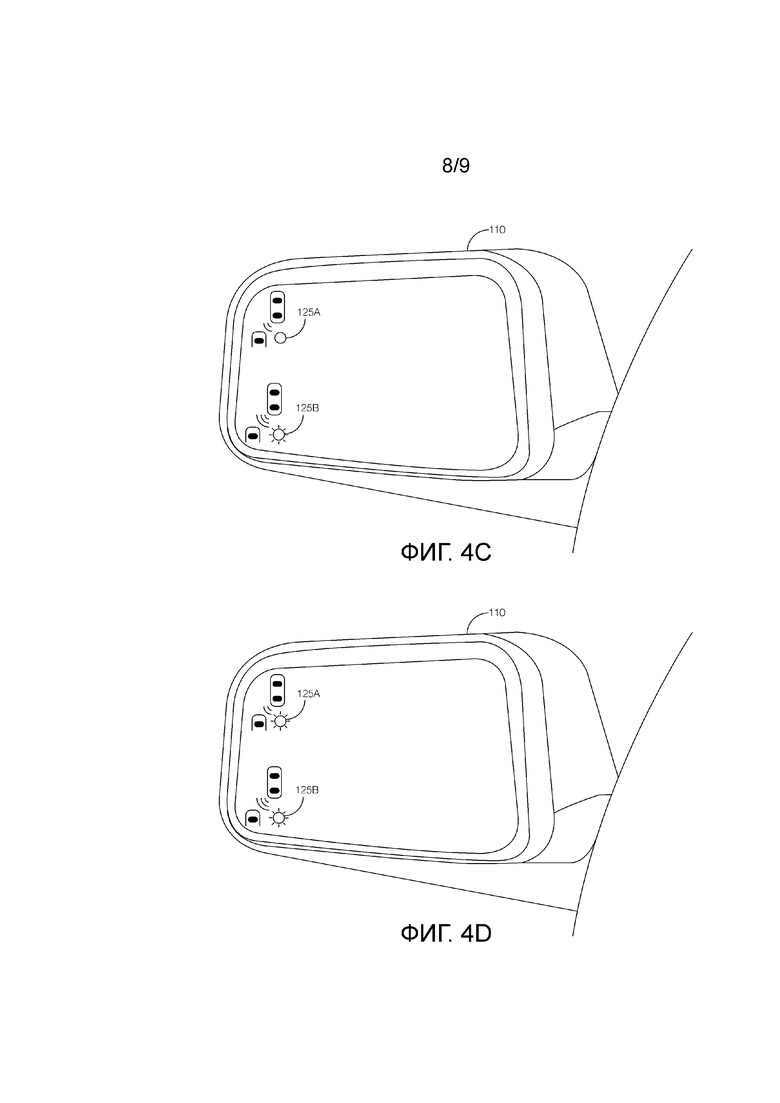
[0037] На фиг. 4C вторые индикаторные лампы 125B освещаются или мигают. Они будут освещаться, если система 105 обнаружения в слепой зоне в отдалённой полосе движения обнаруживает целевое транспортное средство в слепой зоне в отдалённой полосе движения. Они будут мигать, если система 105 обнаружения в слепой зоне в отдалённой полосе движения обнаруживает целевое транспортное средство, движущееся быстро по направлению к слепой зоне в отдалённой полосе движения.
[0038] На фиг. 4D и первые индикаторные лампы 125A, и вторые индикаторные лампы 125B освещаются или мигают. Первые индикаторные лампы 125A будут освещаться, если система 105 обнаружения в слепой зоне в отдалённой полосе движения обнаруживает целевое транспортное средство в слепой зоне в соседней полосе движения. Они будут мигать, если система 105 обнаружения в слепой зоне в отдалённой полосе движения обнаруживает целевое транспортное средство, движущееся быстро по направлению к слепой зоне в соседней полосе движения. Вторые индикаторные лампы 125B будут освещаться, если система 105 обнаружения в слепой зоне в отдалённой полосе движения обнаруживает целевое транспортное средство в слепой зоне в отдалённой полосе движения. Они будут мигать, если система 105 обнаружения в слепой зоне в отдалённой полосе движения обнаруживает целевое транспортное средство, движущееся быстро по направлению к слепой зоне в отдалённой полосе движения. Иногда, как описано выше со ссылкой на фиг. 3C и 3F, одно и то же целевое транспортное средство может вынуждать одну индикаторную лампу 125 мигать, а другую светиться. Например, целевое транспортное средство 305 на фиг. 3C может вынуждать вторые индикаторные лампы 125B освещаться, поскольку оно находится в слепой зоне в отдалённой полосе движения, а первые индикаторные лампы 125A мигать, поскольку оно быстро движется по направлению к слепой зоне в соседней полосе движения. Целевое транспортное средство 305 на фиг. 3F находится на соседней полосе, но в слепой зоне в отдалённой полосе движения, поскольку текущая полоса движения транспортного средства-носителя 100 находится на наклонном въезде на автомагистраль или иначе отделена от соседней полосы движения, пока две полосы движения не сольются. Это другой случай, когда первые индикаторные лампы 125A могут мигать, в зависимости от того, как быстро целевое транспортное средство движется по направлению к слепой зоне в соседней полосе движения, а вторые индикаторные лампы 125B могут освещаться, поскольку оно обнаружено в слепой зоне второй полосы движения.
[0039] Фиг. 5 - это блок-схема примерного процесса 500, который может быть выполнен посредством системы 105 обнаружения в слепой зоне в отдалённой полосе движения. Процесс 500 может быть инициирован в любое время, пока транспортное средство-носитель 100 работает, и он может продолжать выполняться до тех пор, пока транспортное средство-носитель 100 не будет выключено, или система 105 обнаружения в слепой зоне в отдалённой полосе движения не будет иначе выключена. Кроме того, процесс 500 может быть одним примером из множества аналогичных выполняемых процессов. Например, система 105 обнаружения в слепой зоне в отдалённой полосе движения может выполнять процесс 500 для каждого датчика 115, каждого бокового зеркала 110 заднего вида или обоих. Таким образом, вероятно то, что процесс 500 будет выполняться множество раз одновременно.
[0040] На этапе 505 система 105 обнаружения в слепой зоне в отдалённой полосе движения может принимать сигнал обнаружения. Сигнал обнаружения может быть сформирован датчиком 115, таким как радарный датчик, лидарный датчик, визуальный датчик (например, камера), ультразвуковой датчик и т.д., и выведен процессору 120.
[0041] На этапе 510 решения система 105 обнаружения в слепой зоне в отдалённой полосе движения может определять, обнаружено ли целевое транспортное средство. Процессор 120 может обрабатывать сигнал обнаружения для определения того, находится ли целевое транспортное средство в одной из слепых зон, таких как слепая зона в соседней полосе движения, слепая зона в отдалённой полосе движения, или обе слепых зоны, или быстро приближается к ним. Если целевое транспортное средство обнаружено, процесс 500 может переходить к этапу 515. Если целевые транспортные средства не обнаружены, процесс 500 может переходить к этапу 505.
[0042] На этапе 515 решения система 105 обнаружения в слепой зоне в отдалённой полосе движения может определять, находится ли обнаруженное целевое транспортное средство в слепой зоне в соседней полосе движения. Процессор 120 может выполнять такое определение на основе данных, включенных в сигнал обнаружения. Если целевое транспортное средство находится в слепой зоне в соседней полосе движения, процесс 500 может переходить к этапу 520. Иначе, процесс 500 может переходить к этапу 525.
[0043] На этапе 520 система 105 обнаружения в слепой зоне в отдалённой полосе движения может освещать индикаторную лампу 125, ассоциированную с соседней полосой (например, первые индикаторные лампы 125A). Т.е. процессор 120 может выводить предупреждающий сигнал первым индикаторным лампам 125A, побуждающий первые индикаторные лампы 125A оставаться освещенными, пока целевое транспортное средство остается в слепой зоне в соседней полосе движения. Процесс 500 может переходить к этапу 505, так что дополнительные сигналы обнаружения могут быть приняты и обработаны.
[0044] На этапе 525 решения система 105 обнаружения в слепой зоне в отдалённой полосе движения может определять, движется ли быстро транспортное средство по направлению к слепой зоне в соседней полосе движения. Процессор 120 может выполнять такое определение на основе данных, включенных в сигнал обнаружения. Если целевое транспортное средство быстро приближается к слепой зоне в соседней полосе движения, процесс 500 может переходить к этапу 530. Иначе, процесс 500 может переходить к этапу 535.
[0045] На этапе 530 система 105 обнаружения в слепой зоне в отдалённой полосе движения может мигать индикаторной лампой 125, ассоциированной с соседней полосой (например, первые индикаторные лампы 125A). Т.е. процессор 120 может выводить предупреждающий сигнал первым индикаторным лампам 125A, побуждающий первые индикаторные лампы 125A оставаться мигающими, пока целевое транспортное средство выглядит быстро приближающимся к слепой зоне в соседней полосе движения. Процесс 500 может переходить к этапу 505, так что дополнительные сигналы обнаружения могут быть приняты и обработаны.
[0046] На этапе 535 решения система 105 обнаружения в слепой зоне в отдалённой полосе движения может определять, находится ли целевое транспортное средство в слепой зоне в отдалённой полосе движения. Процессор 120 может выполнять такое определение на основе данных, включенных в сигнал обнаружения. Если целевое транспортное средство находится в слепой зоне в отдалённой полосе движения, процесс 500 может переходить к этапу 540. Иначе, процесс 500 может переходить к этапу 545.
[0047] На этапе 540 система 105 обнаружения в слепой зоне в отдалённой полосе движения может освещать индикаторную лампу 125, ассоциированную с отдалённой полосой (например, вторые индикаторные лампы 125B). Т.е. процессор 120 может выводить предупреждающий сигнал вторым индикаторным лампам 125B, побуждающий вторые индикаторные лампы 125B оставаться освещенными, пока целевое транспортное средство остается в слепой зоне в отдалённой полосе движения. Процесс 500 может переходить к этапу 505, так что дополнительные сигналы обнаружения могут быть приняты и обработаны.
[0048] На этапе 545 решения система 105 обнаружения в слепой зоне в отдалённой полосе движения может определять, движется ли быстро транспортное средство по направлению к слепой зоне в отдалённой полосе движения. Процессор 120 может выполнять такое определение на основе данных, включенных в сигнал обнаружения. Если целевое транспортное средство быстро приближается к слепой зоне в отдалённой полосе движения, процесс 500 может переходить к этапу 550. Иначе, процесс 500 может переходить к этапу 505.
[0049] На этапе 550 система 105 обнаружения в слепой зоне в отдалённой полосе движения может мигать индикаторной лампой 125, ассоциированной с отдалённой полосой (например, вторые индикаторные лампы 125B). Т.е. процессор 120 может выводить предупреждающий сигнал вторым индикаторным лампам 125B, побуждающий вторые индикаторные лампы 125B оставаться мигающими, пока целевое транспортное средство выглядит быстро приближающимся к слепой зоне в отдалённой полосе движения. Процесс 500 может переходить к этапу 505, так что дополнительные сигналы обнаружения могут быть приняты и обработаны.
[0050] Соответствующие индикаторные лампы 125, включенные во время процесса 500, могут оставаться включенными, пока по меньшей мере один датчик 115 продолжает обнаруживать целевое транспортное средство в обстоятельствах, соответствующих освещаемой индикаторной лампе 125. Соответствующие индикаторные лампы 125 могут быть выключены, если и когда датчики 115 не обнаруживают целевое транспортное средство в обстоятельствах, соответствующих освещаемой индикаторной лампе 125.
[0051] С помощью этого процесса 500, отдельного или исполняемого одновременно для каждого датчика 115, бокового зеркала 110 заднего вида, или обоих, система 105 обнаружения в слепой зоне в отдалённой полосе движения может обнаруживать целевые транспортные средства на соседней полосе и на отдалённой полосе и уведомлять водителя транспортного средства-носителя 100, когда такие другие транспортные средства присутствуют. Уведомления посредством системы 105 обнаружения в слепой зоне в отдалённой полосе движения могут служить в качестве резервного средства для ситуации, когда водитель ищет через своё плечо транспортные средства в слепой зоне в задней четверти на соседней полосе движения, отдалённой полосе движения или обеих из них, а также помогать водителю при приёме решения о том, когда следует начинать смену полосы движения, следует ли завершить смену полосы движения или прекратить смену полосы движения, например, переместившись обратно на предыдущую полосу движения.
[0052] В общем, описанные вычислительные системы и/или устройства могут применять любую из множества компьютерных операционных систем, включающих в себя, но не считающихся ограниченными, версии и/или разновидности операционной системы Ford Sync®, микропрограммного обеспечения AppLink/Smart Device Link, операционной системы Microsoft Automotive®, операционной системы Microsoft Windows®, операционной системы Unix (например, операционной системы Solaris®, распространяемой корпорацией Oracle Corporation из Редвуд Шорс, Калифорния), операционной системы AIX UNIX, распространяемой компанией International Business Machines из Армонка, Нью-Йорк, операционной системы Linux, операционных систем Mac OS X и iOS, распространяемых компанией Apple Inc. из Купертино, Калифорния, BlackBerry OS, распространяемой компанией Blackberry Ltd из Ватерлоо, Канада, и операционной системы Android, разрабатываемой компанией Google Inc. открытым альянсом мобильных телефонов, или платформы QNX® CAR Platform for Infotainment, предлагаемой компанией QNX Software Systems. Примеры вычислительных устройств включают в себя, не ограничиваясь, бортовой компьютер транспортного средства, компьютерную рабочую станцию, сервер, настольный компьютер, ноутбук, портативный или карманный компьютер или некоторую другую вычислительную систему и/или устройство.
[0053] Вычислительные устройства, как правило, включают в себя машиноисполняемые инструкции, при этом инструкции могут исполняться одним или более вычислительными устройствами, такими как перечисленные выше. Машиноисполняемые инструкции могут быть скомпилированы или интерпретированы из компьютерных программ, созданных с помощью множества языков и/или технологий программирования, включающих в себя, не ограничиваясь, и отдельно или в сочетании, Java™, C, C++, Visual Basic, Java Script, Perl и т.д. Некоторые из этих приложений могут быть скомпилированы и выполнены на виртуальной машине, такой как Java Virtual Machine, виртуальная машина the Dalvik или т.п. В общем случае, процессор (например, микропроцессор) принимает инструкции, например, из памяти, с машиночитаемого носителя и т.д. и выполняет эти инструкции, таким образом, выполняя один или более процессов, включающих в себя один или более процессов, описанных в данном документе. Такие инструкции и другие данные могут быть сохранены и передаваться посредством множества машиночитаемых носителей.
[0054] Машиночитаемый носитель (также называемый считываемым процессором носителем) включает в себя любой постоянный (например, материальный) носитель, который участвует в обеспечении данных (например, инструкций), которые могут быть считаны компьютером (например, процессором компьютера). Такой носитель может принимать многие формы, включающие в себя, но не только, энергонезависимые носители и энергозависимые носители. Энергонезависимые носители могут включать в себя, например, оптические или магнитные диски и другое постоянное запоминающее устройство. Энергозависимые носители могут включать в себя, например, динамическое оперативное запоминающее устройство (DRAM), которое обычно составляет основную память. Такие инструкции могут быть переданы посредством одной или более сред передачи данных, включающих в себя коаксиальные кабели, медный провод и оптические волокна, включающие в себя провода, которые содержат системную шину, соединенную с процессором компьютера. Обычные формы машиночитаемых носителей включают в себя, например, гибкий диск, дискету, жесткий диск, магнитную ленту, любой другой магнитный носитель, CD-ROM, DVD, любой другой оптический носитель, перфорационную карту, бумажную ленту, любой другой физический носитель с рисунками отверстий, RAM, PROM, EPROM, FLASH-EEPROM, любую другую микросхему памяти или картридж, или любой другой носитель, с которого компьютер может выполнять считывание.
[0055] Базы данных, банки данных или другие хранилища данных, описанные в данном документе, могут включать в себя различные виды механизмов для хранения, осуществления доступа и извлечения различных видов данных, включающие в себя иерархическую базу данных, набор файлов в файловой системе, прикладную базу данных в закрытом формате, систему управления реляционной базой данных (RDBMS) и т.д. Каждое такое хранилище данных, как правило, включено в вычислительное устройство, применяющее компьютерную операционную систему, такую как одна из упомянутых выше, и к нему осуществляется доступ через сеть любым одним или более из множества способов. Файловая система может быть доступна из операционной системы компьютера и может включать в себя файлы, сохраненные в различных форматах. RDBMS, как правило, применяет язык структурированных запросов (SQL) в дополнение к языку для создания, хранения, редактирования и выполнения сохраненных процедур, такой как язык PL/SQL, упомянутый выше.
[0056] В некоторых примерах элементы системы могут быть реализованы как машиночитаемые инструкции (например, программное обеспечение) на одном или более вычислительных устройствах (например, серверах, персональных компьютерах и т.д.), сохраненные на машиночитаемых носителях, ассоциированных с ним (например, дисках, запоминающих устройствах и т.д.). Компьютерный программный продукт может содержать такие инструкции, сохраненные на считываемых компьютером носителях, для выполнения функций, описанных в данном документе.
[0057] Что касается процессов, систем, способов, эвристических правил и т.д., описанных в данном документе, должно быть понятно, что, хотя этапы таких процессов и т.д. были описаны как происходящие согласно некой упорядоченной последовательности, такие процессы могут быть применены на практике с помощью описанных этапов, выполняемых в порядке, отличном от порядка, описанного в данном документе. Кроме того, следует понимать, что некоторые этапы могут выполняться одновременно, что могут быть добавлены другие этапы, или что некоторые этапы, описанные в данном документе, могут быть пропущены. Другими словами, описания процессов в данном документе приведены с целью иллюстрации некоторых вариантов осуществления и не должны никоим образом истолковываться как ограничивающие формулу изобретения.
[0058] Соответственно, должно быть понятно, что вышеприведенное описание предназначено быть иллюстративным, а не ограничивающим. Многие варианты осуществления и применения, отличные от приведённых примеров, будут очевидны по прочтении вышеприведенного описания. Объём должен быть определен не путём обращения к вышеприведенному описанию, а должен быть определен путём обращения к приложенной формуле изобретения вместе с полным объёмом эквивалентов, на которые распространяется такая формула изобретения. Ожидается и предполагается, что в технологиях, описанных в данном документе, в будущем будут выполнены усовершенствования, и что раскрытые системы и способы будут включены в такие будущие варианты осуществления. В конечном итоге, должно быть понятно, что предмет заявки обеспечивает возможность модификации и изменения.
[0059] Все термины, используемые в формуле изобретения, предполагают получение их обычных значений, которые понятны специалистам в области техники, описанной в данном документе, если в данном документе явным образом не указано иное. В частности, использование форм единственного числа, слова «упомянутый» и т.д. следует понимать как указание на один или более указанных элементов, если в формуле изобретения не указано явное ограничение иным.
[0060] Реферат изобретения приведён, чтобы позволить читателю быстро определить технический характер изобретения. Он приведён с пониманием того, что он не будет использоваться для интерпретации или ограничения сущности или объёма формулы изобретения. Кроме того, в вышеприведённом подробном описании может быть видно, что различные признаки сгруппированы вместе в различных вариантах осуществления для упорядочивания описания. Данный способ описания не должен быть интерпретирован как подразумевающий, что заявленные варианты осуществления требуют больше признаков, чем точно приведено в каждом пункте формулы. Скорее, как отражает последующая формула, объект изобретения состоит менее чем во всех признаках одного раскрытого варианта осуществления. Таким образом, последующая формула настоящим включена в подробное описание, причём каждый пункт формулы является самостоятельным как отдельно заявленный вариант осуществления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ УМЕНЬШЕНИЯ СЛЕПОЙ ЗОНЫ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2707496C1 |
| СИСТЕМА И СПОСОБ ДЛЯ УЛУЧШЕННОГО ПРЕОДОЛЕНИЯ ИЗГИБОВ | 2015 |
|
RU2711403C2 |
| СИСТЕМА И СПОСОБ ДЛЯ УЛУЧШЕННОГО ОБНАРУЖЕНИЯ ПОВЕДЕНИЯ В ПРЕДЕЛАХ ПОЛОСЫ ДВИЖЕНИЯ | 2015 |
|
RU2710125C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СЛЕПОЙ ЗОНЫ ТРАНСПОРТНОГО СРЕДСТВА С БУКСИРУЕМЫМ ПРИЦЕПОМ И ТРАНСПОРТНОЕ СРЕДСТВО | 2015 |
|
RU2702291C2 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ О СТОЛКНОВЕНИИ | 2019 |
|
RU2724044C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ И СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2639960C2 |
| УЛУЧШЕННОЕ ПРЕДОТВРАЩЕНИЕ СТОЛКНОВЕНИЙ | 2015 |
|
RU2708534C2 |
| СПОСОБ ОПОВЕЩЕНИЯ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА И ТРАНСПОРТНОЕ СРЕДСТВО | 2017 |
|
RU2668350C9 |
| СПОСОБ ДЛЯ УПРАВЛЕНИЯ УКАЗАТЕЛЕМ ПОВОРОТА И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ УКАЗАТЕЛЕМ ПОВОРОТА | 2017 |
|
RU2746553C1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ | 2013 |
|
RU2595133C2 |
Заявлена группа изобретений, которая относится к системе и способу обнаружения транспортного средства в слепой зоне. Система, реализующая способ обнаружения транспортного средства в слепой зоне, включает в себя по меньшей мере один датчик, который может обнаруживать первое целевое транспортное средство в первой слепой зоне и второе целевое транспортное средство во второй слепой зоне. Первая слепая зона ассоциирована с соседней полосой относительно транспортного средства-носителя, а вторая слепая зона ассоциирована с отдалённой полосой относительно транспортного средства-носителя. Процессор может формировать первый предупреждающий сигнал, когда обнаружено первое целевое транспортное средство, и второй предупреждающий сигнал, когда обнаружено второе целевое транспортное средство. Предупреждающий сигнал инициирует освещение индикаторных ламп, установленных в боковом зеркале транспортного средства. Обеспечивается более точное обнаружение транспортных средств в слепой зоне. 2 н. и 14 з.п. ф-лы, 13 ил.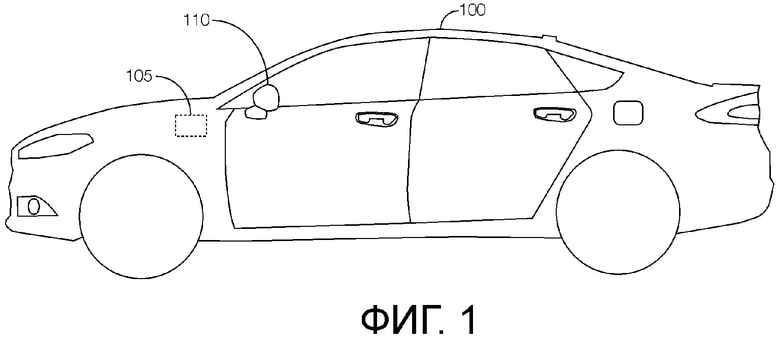
1. Система обнаружения транспортного средства в слепой зоне, содержащая:
по меньшей мере один датчик, запрограммированный для обнаружения первого целевого транспортного средства в первой слепой зоне и второе целевое транспортное средство во второй слепой зоне, при этом первая слепая зона ассоциирована с соседней полосой относительно транспортного средства-носителя, и при этом вторая слепая зона ассоциирована с отдалённой полосой относительно транспортного средства-носителя;
первую индикаторную лампу, расположенную в боковом зеркале заднего вида транспортного средства;
вторую индикаторную лампу, расположенную в боковом зеркале заднего вида транспортного средства; и
процессор, запрограммированный для формирования первого предупреждающего сигнала, когда обнаружено первое целевое транспортное средство, и второго предупреждающего сигнала, когда обнаружено второе целевое транспортное средство, причём процессор запрограммирован для вывода первого предупреждающего сигнала для освещения первой индикаторной лампы и вывода второго предупреждающего сигнала для освещения второй индикаторной лампы.
2. Система по п. 1, в которой по меньшей мере один датчик встроен в боковое зеркало заднего вида транспортного средства.
3. Система по п. 1, в которой процессор запрограммирован для обнаружения третьего целевого транспортного средства на соседней полосе, движущегося по направлению к первой слепой зоне.
4. Система по п. 3, в которой процессор запрограммирован для формирования первого предупреждающего сигнала, когда третье целевое транспортное средство обнаружено на соседней полосе и движется по направлению к первой слепой зоне.
5. Система по п. 4, в которой процессор запрограммирован для формирования первого предупреждающего сигнала, когда третье целевое транспортное средство обнаружено на соседней полосе и движется по направлению к первой слепой зоне по меньшей мере с заданной скоростью относительно транспортного средства-носителя.
6. Система по п. 3, в которой процессор запрограммирован для обнаружения четвертого целевого транспортного средства на отдалённой полосе, движущегося по направлению ко второй слепой зоне.
7. Система по п. 6, в которой процессор запрограммирован для формирования второго предупреждающего сигнала, когда четвертое целевое транспортное средство обнаружено на отдалённой полосе и движется по направлению ко второй слепой зоне.
8. Система по п. 7, в которой процессор запрограммирован для формирования второго предупреждающего сигнала, когда четвертое целевое транспортное средство обнаружено на отдалённой полосе и движется по направлению ко второй слепой зоне по меньшей мере с заданной скоростью относительно транспортного средства-носителя.
9. Система по п. 1, в которой соседняя полоса движения находится рядом с текущей полосой транспортного средства-носителя.
10. Система по п. 9, в которой соседняя полоса движения находится между текущей полосой транспортного средства-носителя и отдалённой полосой.
11. Система по п. 9, в которой текущая полоса движения является наклонным въездом и при этом соседняя полоса движения сливается с текущей полосой.
12. Способ обнаружения транспортного средства в слепой зоне, содержащий этапы, на которых:
обнаруживают первое целевое транспортное средство в первой слепой зоне, ассоциированной с соседней полосой относительно транспортного средства-носителя;
обнаруживают второе целевое транспортное средство во второй слепой зоне, ассоциированной с отдалённой полосой относительно транспортного средства-носителя;
формируют первый предупреждающий сигнал, когда обнаружено первое целевое транспортное средство;
выводят первый предупреждающий сигнал на первую индикаторную лампу, расположенную в боковом зеркале заднего вида транспортного средства-носителя;
формируют второй предупреждающий сигнал, когда обнаружено второе целевое транспортное средство; и
выводят второй предупреждающий сигнал на вторую индикаторную лампу, расположенную в боковом зеркале заднего вида транспортного средства-носителя.
13. Способ по п. 12, дополнительно содержащий этапы, на которых:
обнаруживают третье целевое транспортное средство на соседней полосе, движущееся по направлению к первой слепой зоне; и
формируют первый предупреждающий сигнал, когда третье целевое транспортное средство обнаружено на соседней полосе и движется по направлению к первой слепой зоне.
14. Способ по п. 13, в котором первый предупреждающий сигнал формируют, когда третье целевое транспортное средство обнаружено на соседней полосе и движется по направлению к первой слепой зоне по меньшей мере с заданной скоростью относительно транспортного средства-носителя.
15. Способ по п. 12, дополнительно содержащий этапы, на которых:
обнаруживают четвертое целевое транспортное средство на отдалённой полосе, движущееся по направлению ко второй слепой зоне; и
формируют второй предупреждающий сигнал, когда четвертое целевое транспортное средство обнаружено на отдалённой полосе и движется по направлению ко второй слепой зоне.
16. Способ по п. 15, в котором второй предупреждающий сигнал формируют, когда четвертое целевое транспортное средство обнаружено на отдалённой полосе и движется по направлению ко второй слепой зоне по меньшей мере с заданной скоростью относительно транспортного средства-носителя.
| US 7477137 B2, 13.01.2009, реферат | |||
| CN 105150927 A, 16.12.2015, реферат | |||
| СПОСОБ КОНТРОЛЯ "СЛЕПОЙ ЗОНЫ" БОКОВЫХ ЗЕРКАЛ ДВИЖУЩЕГОСЯ ВПЕРЕДИ АВТОМОБИЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2542835C1 |

