ОБЛАСТЬ ТЕХНИКИ
Эта заявка относится к подсистемам активного подавления шума транспортного средства.
УРОВЕНЬ ТЕХНИКИ
В последние годы, облегченная конструкция помогает добиваться транспортных средств с более низким энергопотреблением. Также было оценено, что экономия топлива может возрастать на 6-8%, если вес транспортного средства снижается на 10%. Облегченная конструкция, однако, может усиливать вибрацию конструкции и, следовательно, внутренний шум, особенно на низких частотах. Но, пассивное подавление шума может не быть идеальным, так как оно имеет тенденцию увеличивать вес и себестоимость транспортного средства. Поэтому была разработана технология активного подавления шума (ANC), которая использует аудиосистему в качестве вспомогательного громкоговорителя для подавления шума двигателя, шума силовой передачи и шума от движения по дороге.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Во многих применениях активного подавления шума (ANC), проблемой является вычислительная нагрузка и низкая скорость схождения, вызванные большим разбросом собственных значений опорного сигнала. Безынерционный алгоритм с делением на подполосы, который раскладывает сигналы с полной полосы на набор подполос, был представлен ранее для снижения вычислительной сложности и улучшения свойства сходимости системы подавления. Здесь представлен подробный вывод равномерного безынерционного алгоритма с делением на подполосы. Более того, обсуждено неотъемлемое ограничение равномерной гребенки фильтров дискретного преобразования Фурье (ДПФ, DFT). (Была обнаружена проблема наложения спектров между соседними подполосами). Этот неотъемлемый эффект наложения спектров (алиасинга) может ухудшать рабочие характеристики системы. Отсюда, безынерционный алгоритм с делением на подполосы и переменной шириной полосы пропускания, в одном из примеров, предложен в качестве основы системы активного подавления шума для различных типов шумов от движения по дороге. Этот алгоритм может быть способен преодолеть эффект наложения спектров стандартного безынерционного алгоритма с делением на подполосы. Этот алгоритм, в некоторых реализациях, эффективен и имеет низкие вычислительные затраты. Для подтверждения рабочих характеристик предложенного алгоритма, было проведено численное моделирование для подавления измеренных шумов от движения по дороге. Результаты моделирования указывают, что безынерционный алгоритм с делением на подполосы и переменной шириной полосы пропускания является возможным вариантом для реализации широкополосной системы ANC.
В одном из примеров, транспортное средство имеет систему активного подавления шума, включающую в себя процессор. В способе активного подавления шума согласно настоящему изобретению процессор реализует безынерционный алгоритм подавления по минимальной среднеквадратической ошибке с фильтрацией опорного сигнала и делением на подполосы, включающий в себя гребенку фильтров дискретного преобразования Фурье с переменной шириной полосы пропускания, имеющую такое количество подполос, чтобы система, в ответ на опорный сигнал широкополосного белого шума, указывающий шум от движения по дороге в транспортном средстве, демонстрировала равномерную спектральную характеристику на всем диапазоне частот, определенном подполосами, и частично гасила шум от движения по дороге. Безынерционный алгоритм подавления по минимальной среднеквадратической ошибке с фильтрацией опорного сигнала и делением на подполосы дополнительно может включать в себя равномерную гребенку фильтров. Центральные частоты гребенки фильтров дискретного преобразования Фурье с переменной шириной полосы пропускания могут быть смещены от центральных частот равномерной гребенки фильтров на половину ширины полосы пропускания равномерной гребенки фильтров. Ширина полосы пропускания гребенки фильтров дискретного преобразования Фурье с переменной шириной полосы пропускания может быть меньшей, чем ширина полосы пропускания равномерной гребенки фильтров. Ширина полосы пропускания гребенки фильтров дискретного преобразования Фурье с переменной шириной полосы пропускания может иметь значение по меньшей мере половины ширины полосы пропускания равномерной гребенки фильтров. Система активного подавления шума (ANC), кроме того, может включать в себя громкоговоритель. Система ANC может частично гасить шум от движения по дороге с помощью выходного сигнала громкоговорителя.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
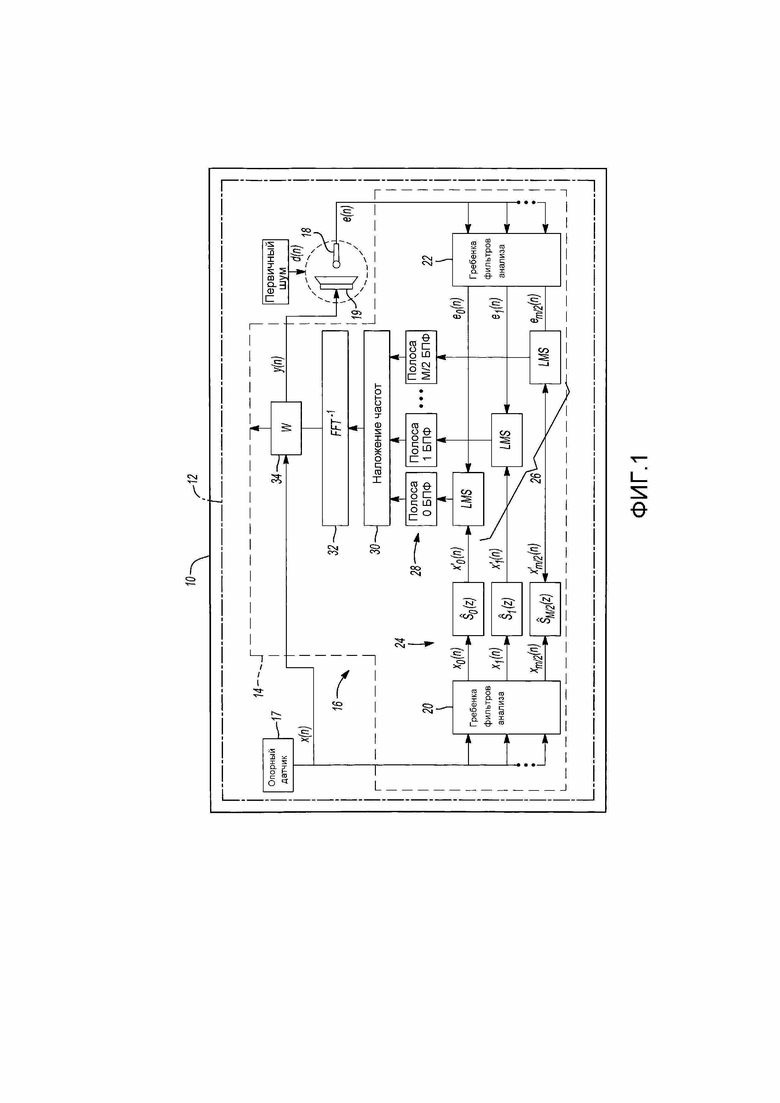
Фиг. 1 - схема безынерционного алгоритма с делением на подполосы с одним входом и одним выходом (SISO) в контексте системы активного подавления шума для транспортного средства.
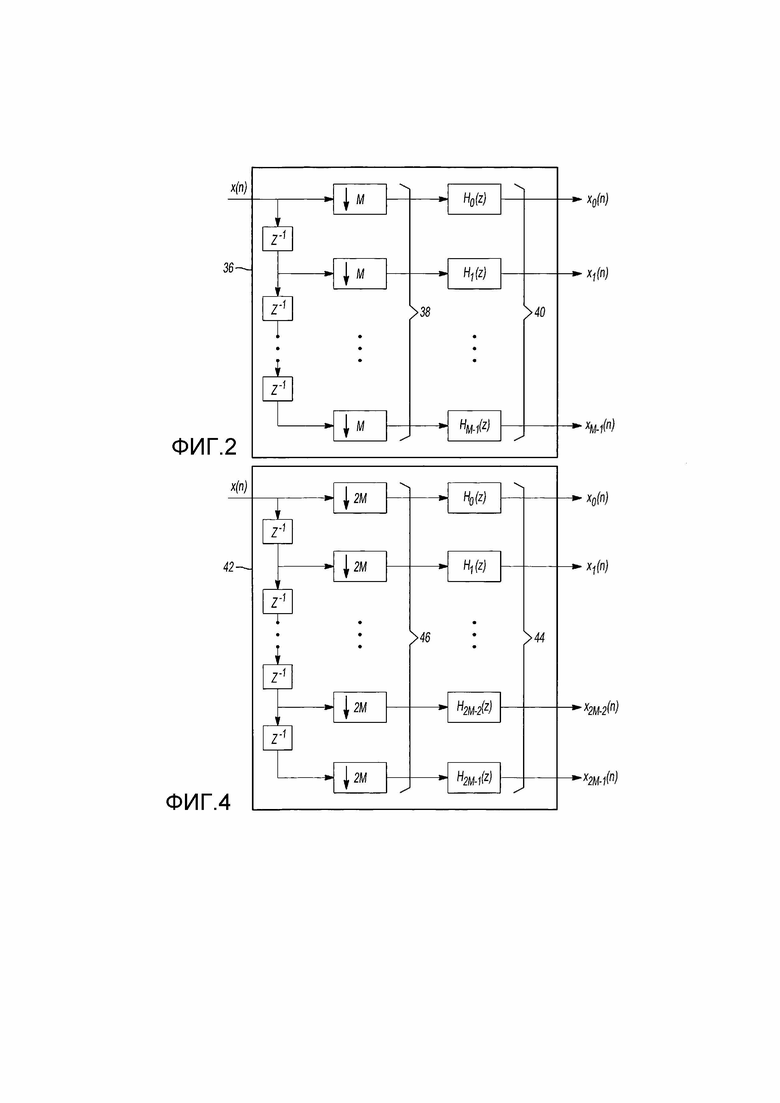
Фиг. 2 - схема равномерной гребенки фильтров анализа дискретного преобразования Фурье (ДПФ).
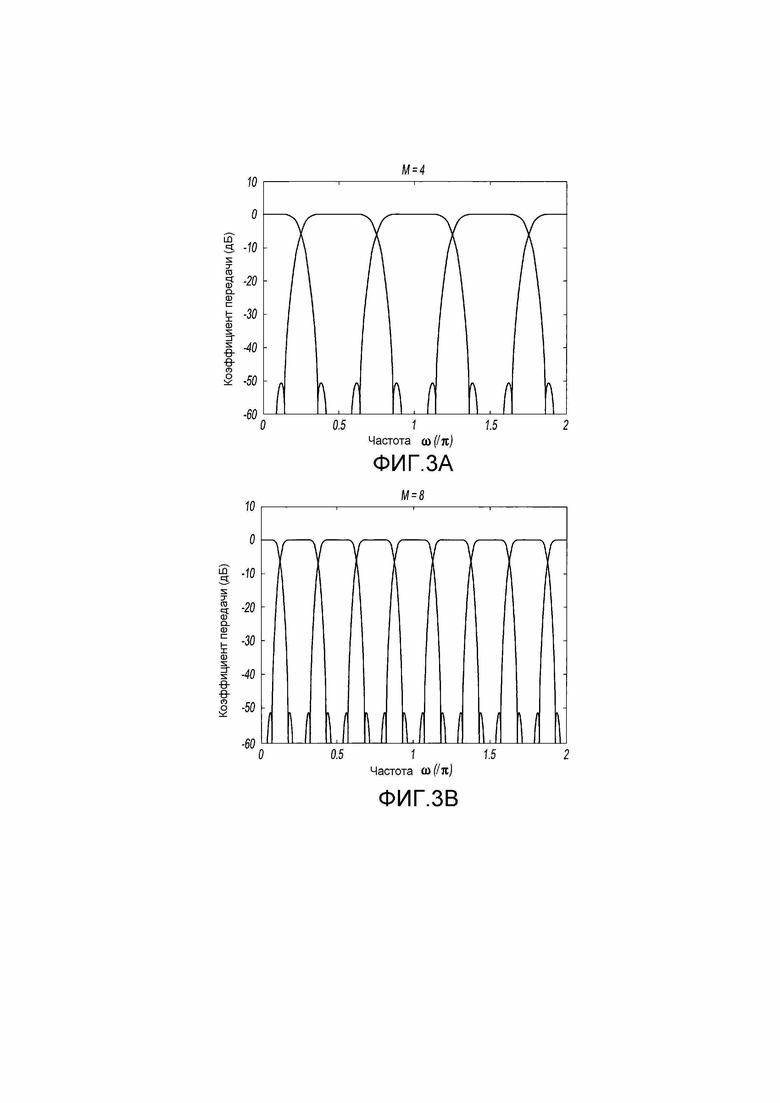
Фиг. 3A и 3B - графики амплитудных характеристик гребенок фильтров ДПФ для разных количеств подполос.
Фиг. 4 - схема гребенки фильтров анализа ДПФ с переменной шириной полосы пропускания.
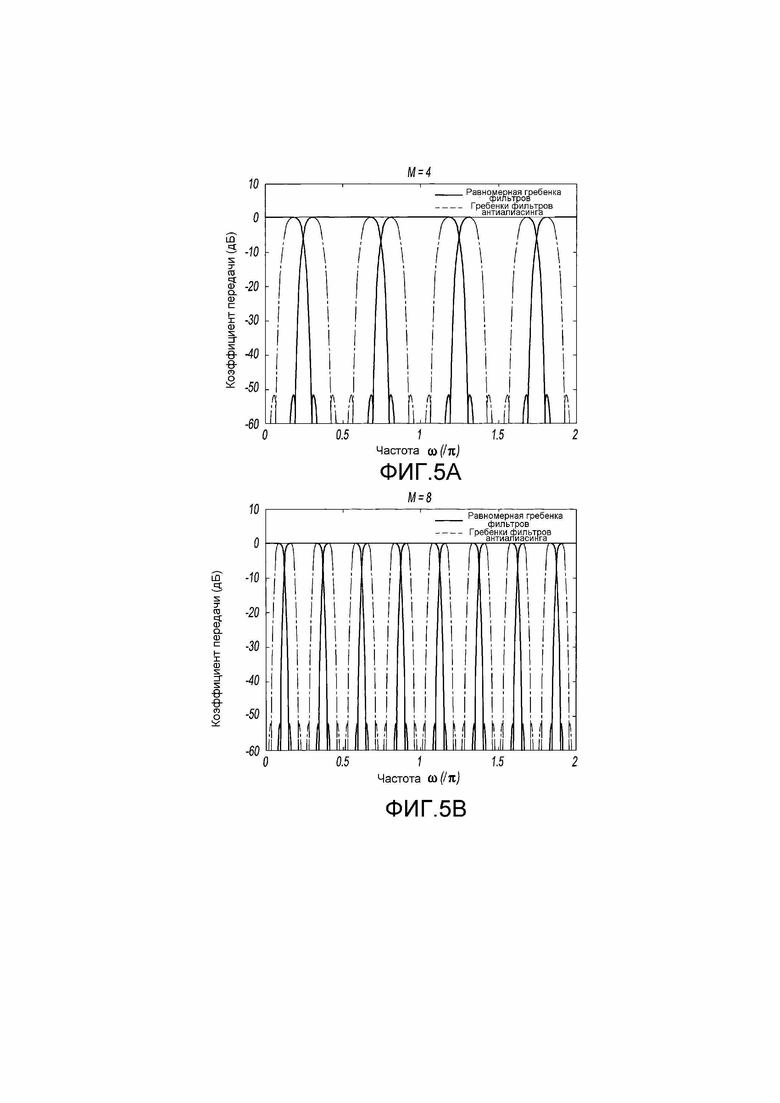
Фиг. 5A и 5B - графики амплитудных характеристик гребенок фильтров ДПФ переменной шириной полосы пропускания для разных количеств подполос.
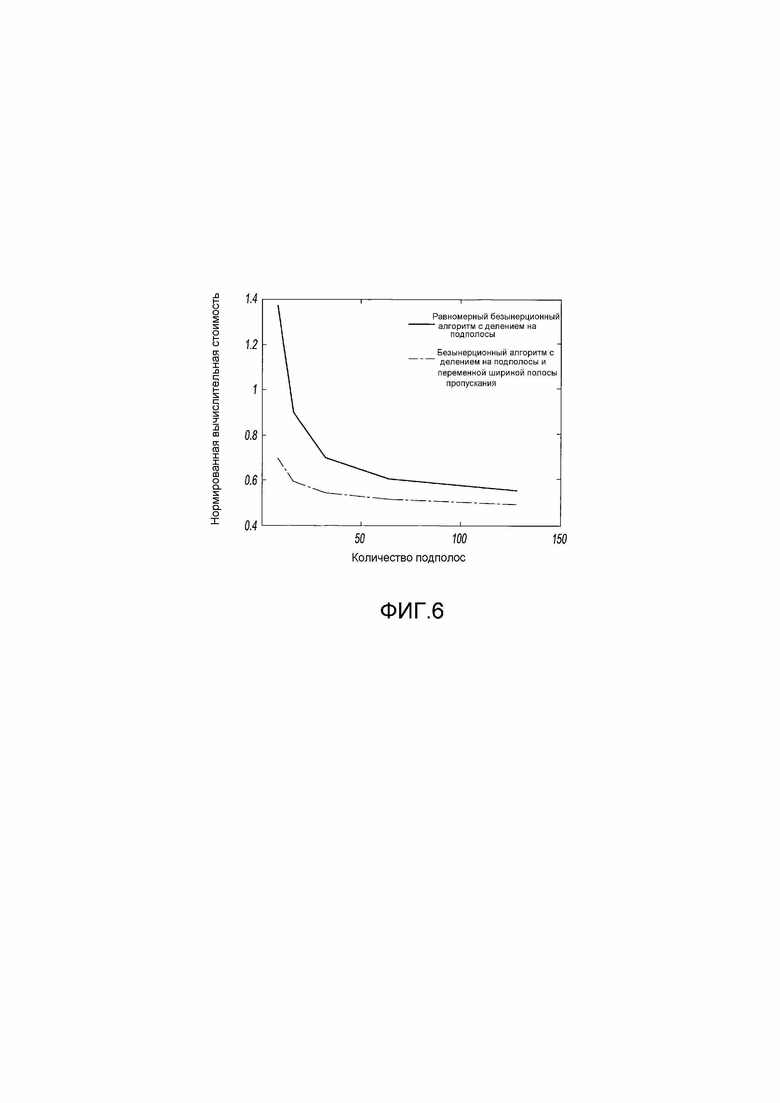
Фиг. 6 - график сравнения вычислительной сложности разных безынерционных алгоритмов с делением на подполосы.
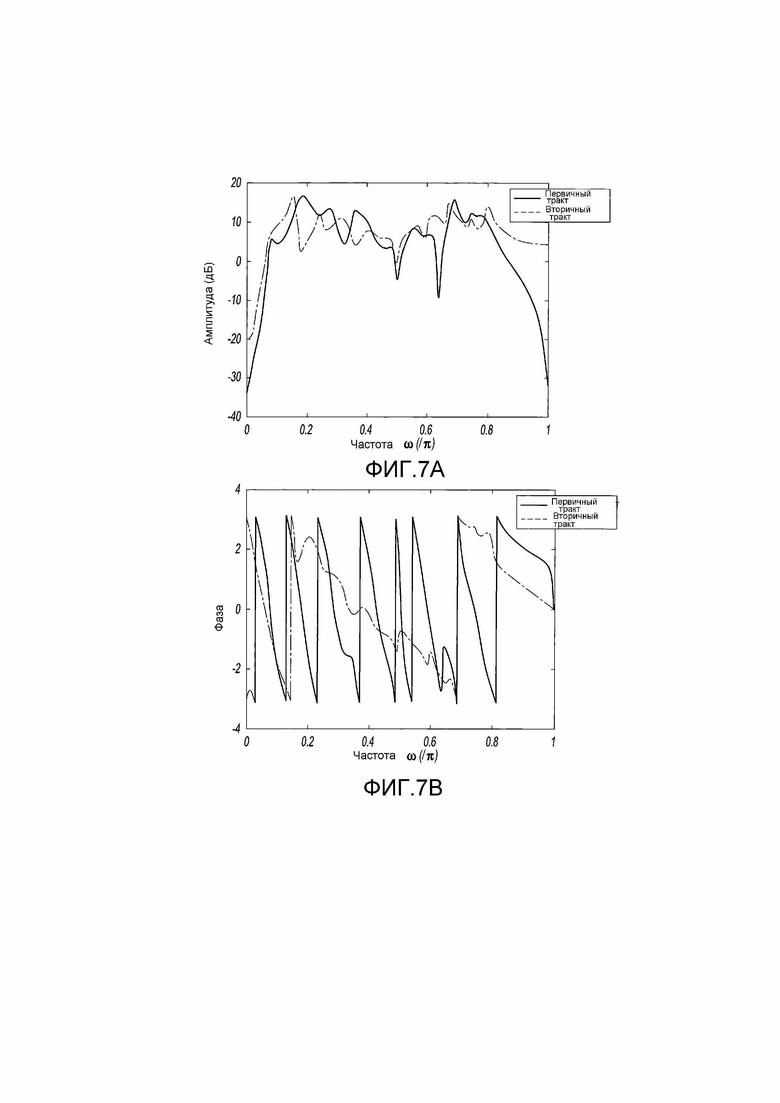
Фиг. 7A и 7B - графики амплитудной и фазовой характеристик, соответственно, первичного и вторичного трактов.
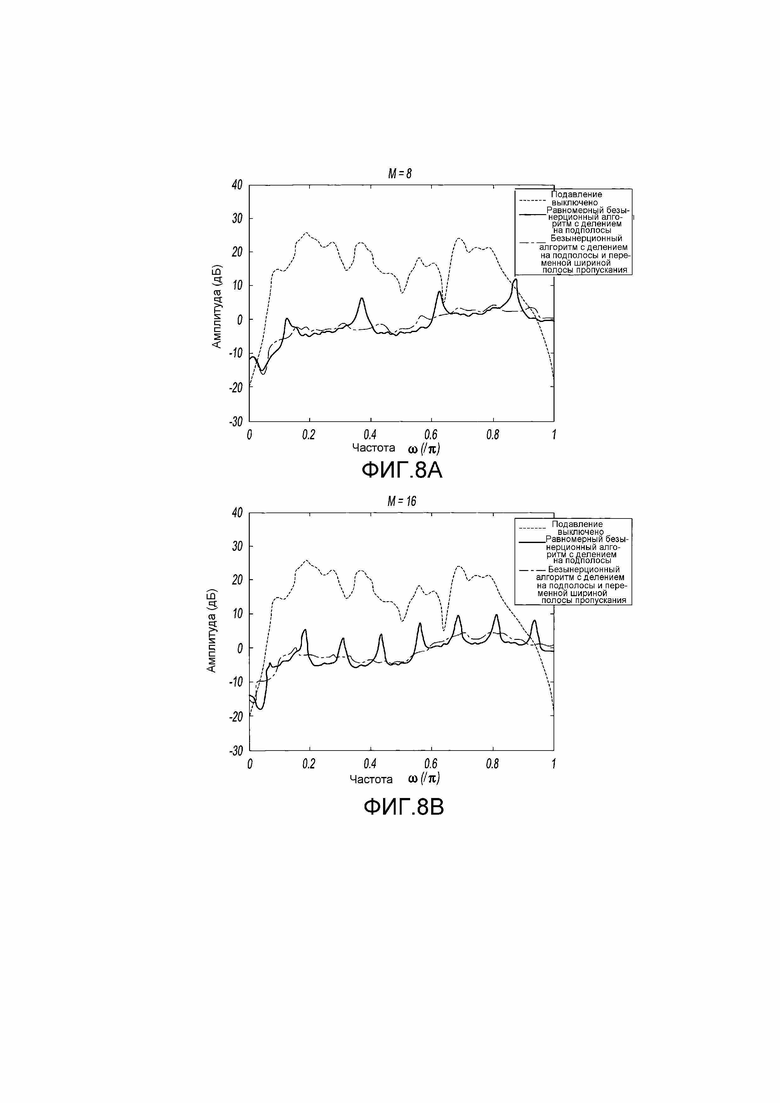
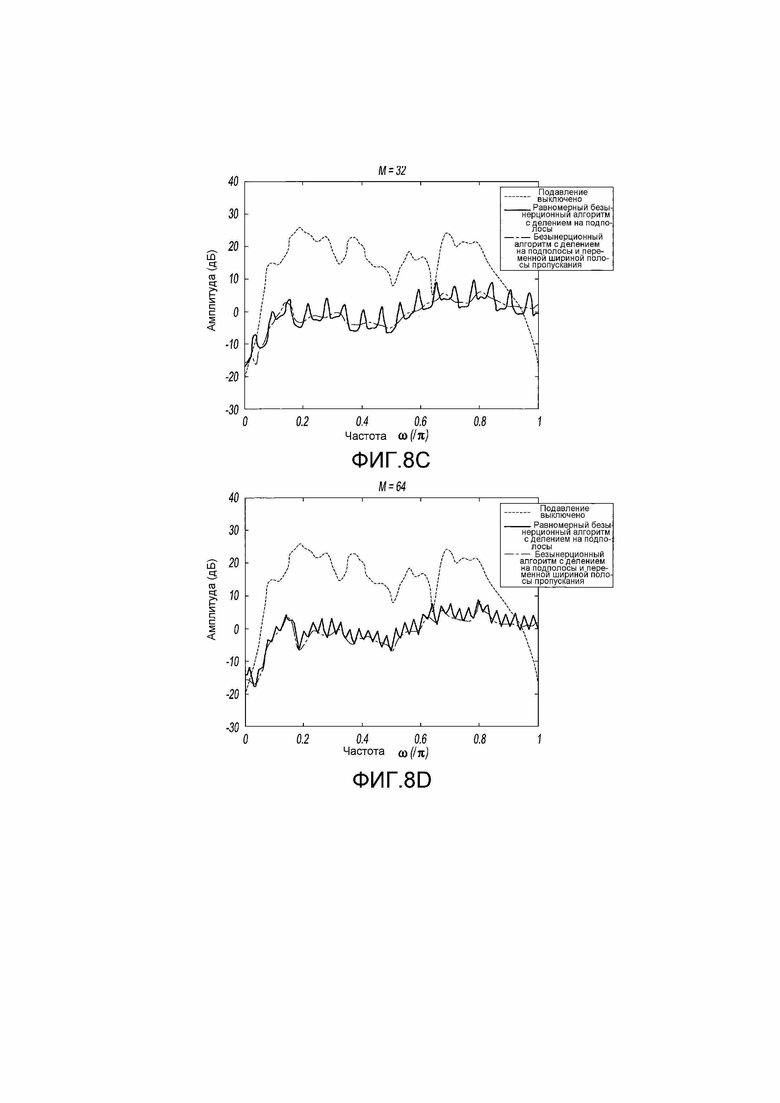
Фиг. 8A-8D - графики сравнений установившихся рабочих характеристик равномерного и с переменной шириной полосы пропускания безынерционного алгоритмов с делением на подполосы, использующих разные количества подполос, для синтезированных данных.
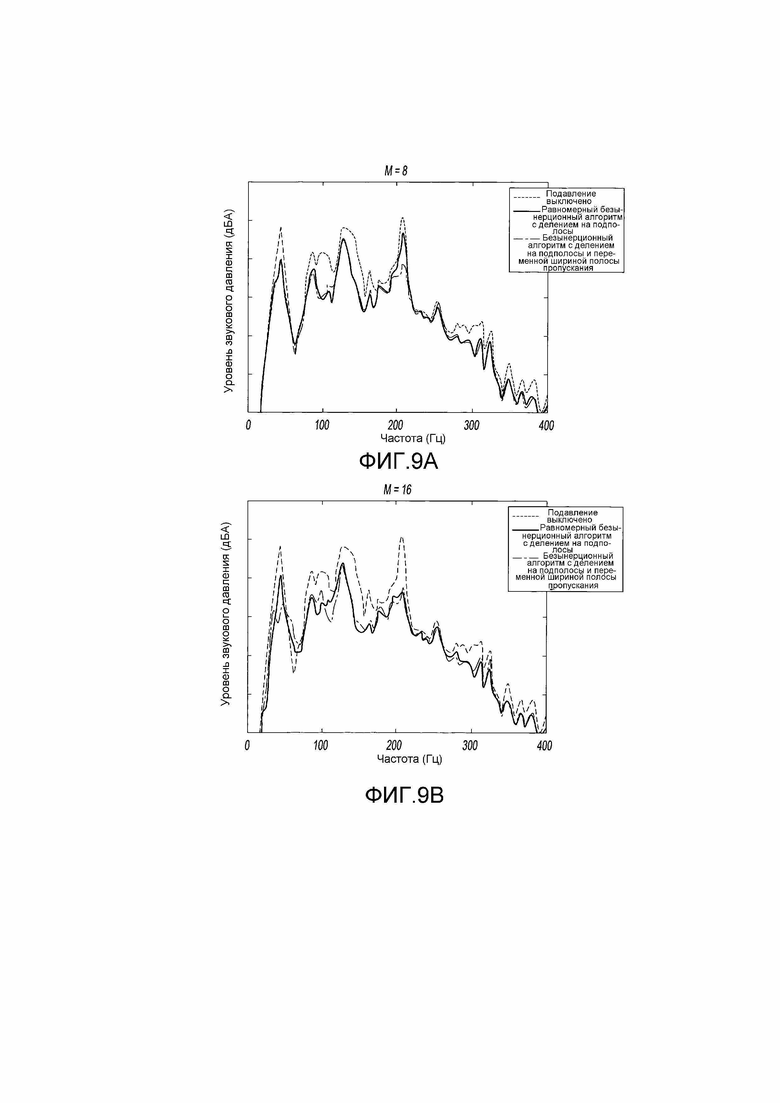
Фиг. 9A и 9B - графики сравнений установившихся рабочих характеристик равномерного и с переменной шириной полосы пропускания безынерционного алгоритмов с делением на подполосы, использующих разные количества подполос, для бетонной дороги.
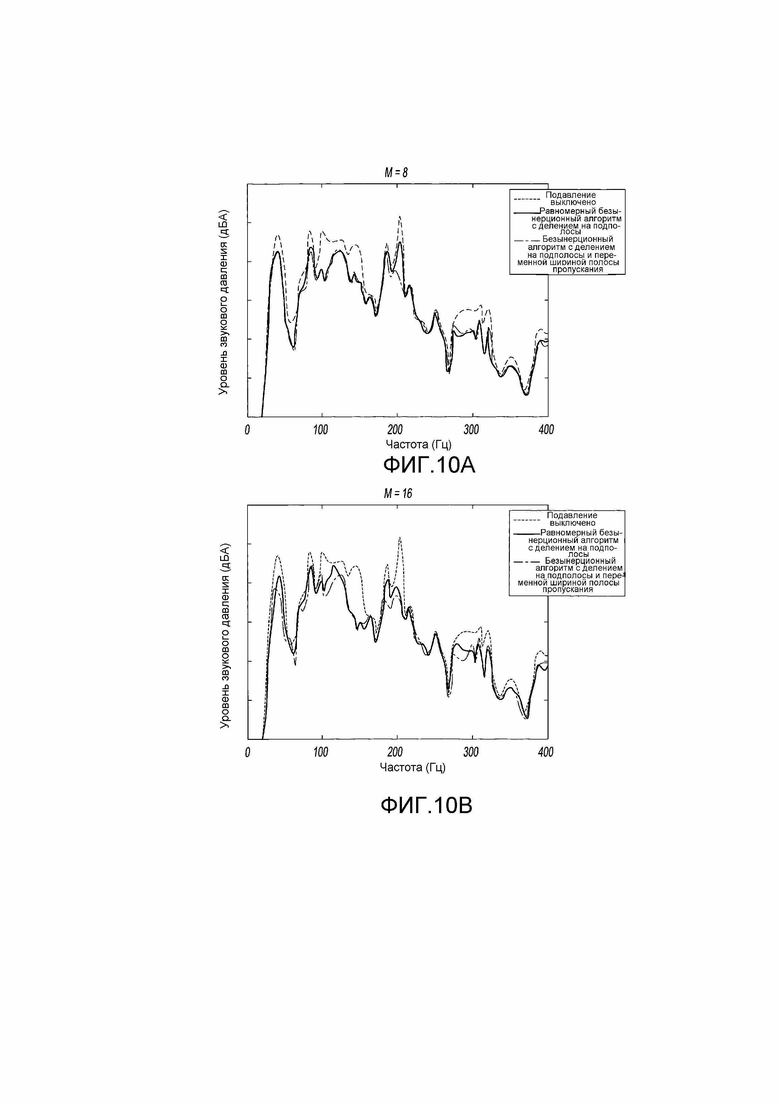
Фиг. 10A и 10B - графики сравнений установившихся рабочих характеристик равномерного и с переменной шириной полосы пропускания безынерционного алгоритмов с делением на подполосы, использующих разные количества подполос, для неровной дороги.
ПОДРОБНОЕ ОПИСАНИЕ
Варианты осуществления настоящего раскрытия описаны в материалах настоящей заявки. Должно быть понятно, однако, что раскрытые варианты осуществления являются всего лишь примерами, и другие варианты осуществления могут принимать различные и альтернативные формы. Фигуры не обязательно должны определять масштаб; некоторые признаки могли быть преувеличены или сведены к минимуму, чтобы показать подробности конкретных компонентов. Поэтому, специфичные конструктивные и функциональные детали, раскрытые в материалах настоящей заявки, не должны интерпретироваться в качестве ограничивающих, а только качестве представляющих основу для изучения специалистом в данной области техники для различного применения настоящего изобретения. Как будут понимать специалисты в данной области техники, различные признаки, проиллюстрированные и описанные со ссылкой на любую одну из фигур, могут комбинироваться с признаками, проиллюстрированными на одной или более других фигур, для создания вариантов осуществления, которые не проиллюстрированы и не описаны явно. Проиллюстрированные комбинации признаков дают характерные варианты осуществления для типичных применений. Различные комбинации и модификации признаков, совместимых с доктринами этого раскрытия, однако, могли бы требоваться для конкретных применений или реализаций.
ВВЕДЕНИЕ
Активное подавление шума (ANC) основано на принципе наложения, и нежелательный первичный шум гасится вторичным шумом равной амплитуды и противоположной фазы. Как правило, шум от движения по дороге является «цветным» широкополосным шумом с энергией, лежащей в диапазоне частот 60-400 Гц. Многие попытались разработать осуществимую систему ANC для применений в транспортных средствах за последние три десятилетия. Например, реальный путь для подавления шума от движения по дороге с использованием системы ANC был показан несколько лет тому назад. Позднее, была спроектирована многоканальная система ANC за счет использования традиционного алгоритма среднеквадратической ошибки с фильтрацией опорного сигнала (FXLMS) для подавления шума от движения по дороге наряду с эталонным акселерометром и вторичным громкоговорителем. Затем была представлена система ANC, комбинированная с аудиосистемой транспортного средства, и система ANC реального времени с общим алгоритмом FXLMS. Наибольшая часть этих примеров использует традиционный алгоритм FXLMS. Этот алгоритм, однако, имеет неотъемлемые недостатки для подавления шума от движения по дороге, так как широкополосный шум требует адаптивного фильтра высокого порядка, который повышает вычислительную нагрузку, а размер шага этого алгоритма не пригоден для всех частот вследствие большого разброса собственных значений «цветного» опорного сигнала, что дает в результате низкую скорость сходимости.
Для преодоления вышеприведенных проблем, ранее был разработан алгоритм с делением на подполосы на основании алгоритма FXLMS. Это понижало вычислительную нагрузку, так как адаптивная фильтрация выполняется с более низкой частотой прореживания. Но быстрая сходимость возможна, так как спектральный динамический диапазон уменьшен в каждой подполосе. Более того, алгоритмы с делением на подполосы использовались в акустическом эхоподавлении. К сожалению, такие технологии не могут применяться непосредственно к системе ANC вследствие нежелательных задержек, привнесенных в тракт сигнала. Эти задержки ограничивают рабочие характеристики и устойчивость. Отсюда, был предложен безынерционный алгоритм с делением на подполосы для применений ANC. Задержки тракта сигнала избегались наряду с сохранением преимущества алгоритма с делением на подполосы. В самое последнее время, была разработана система ANC с комбинированными прямой связью и обратной связью на основании безынерционного алгоритма с делением на подполосы для подавления внутреннего шума от движения по дороге. Традиционный безынерционный алгоритм с делением на подполосы, однако, имеет неотъемлемое ограничение, ассоциативно связанное с равномерной (то есть имеющей равномерную характеристику) гребенкой фильтра анализа дискретного преобразования Фурье (ДПФ), которое будет приводить к эффектам наложения спектров вследствие просачивания спектральных составляющих между смежными гребенками фильтров. В данном документе представлена конструкция гребенки фильтров анализа ДПФ с переменной шириной полосы пропускания для минимизации эффекта наложения спектров и снижения вычислительной нагрузки.
БЕЗЫНЕРЦИОННЫЙ АЛГОРИТМ С ДЕЛЕНИЕМ НА ПОДПОЛОСЫ И ПЕРЕМЕННОЙ ШИРИНОЙ ПОЛОСЫ ПРОПУСКАНИЯ
Равномерный безынерционный алгоритм с делением на подполосы
Фиг. 1 показывает схему транспортного средства 10, включающего в себя систему 12 активного подавления шума (ANC). Система 12 ANC, в этом примере, включает в себя по меньшей мере один процессор 14, реализующий безынерционный алгоритм 16 Моргана с делением на подполосы с одним входом и одним выходом, где  - опорный сигнал, который принимается акселерометрами и/или микрофонами 17,
- опорный сигнал, который принимается акселерометрами и/или микрофонами 17,  - первичный шум, принимаемый микрофоном 18, а
- первичный шум, принимаемый микрофоном 18, а  - сигнал ошибки после наложения первичного шума и вторичного гасящего шума. Вторичный гасящий шум выводится в кабину транспортного средства 10 через громкоговоритель 19. Алгоритм 16 включает в себя гребенки 20, 22 фильтров анализа, блоки 24 вторичного тракта с делением на подполосы, блоки 26 алгоритма адаптивной фильтрации по минимальной среднеквадратической ошибке (LMS), блоки 28 быстрого преобразования Фурье (БПФ), блок 30 наложения частот, блок 32 обратного БПФ и блок 34 адаптивного фильтра. Как показано, гребенка фильтров анализа состоит из M подполос (следует отметить, что M - четное число). Для реальных сигналов необходимо всего лишь M/2+1 подполос. Эти M/2+1 подполос соответствуют положительным частотным составляющим характеристики широкополосного фильтра; остальные сформированы комплексно-сопряженной симметрией. Опорный сигнал и сигнал ошибки раскладываются на наборы сигналов подполос. Эта компоновка, конечно, может быть расширена до многоканальной конфигурации.
- сигнал ошибки после наложения первичного шума и вторичного гасящего шума. Вторичный гасящий шум выводится в кабину транспортного средства 10 через громкоговоритель 19. Алгоритм 16 включает в себя гребенки 20, 22 фильтров анализа, блоки 24 вторичного тракта с делением на подполосы, блоки 26 алгоритма адаптивной фильтрации по минимальной среднеквадратической ошибке (LMS), блоки 28 быстрого преобразования Фурье (БПФ), блок 30 наложения частот, блок 32 обратного БПФ и блок 34 адаптивного фильтра. Как показано, гребенка фильтров анализа состоит из M подполос (следует отметить, что M - четное число). Для реальных сигналов необходимо всего лишь M/2+1 подполос. Эти M/2+1 подполос соответствуют положительным частотным составляющим характеристики широкополосного фильтра; остальные сформированы комплексно-сопряженной симметрией. Опорный сигнал и сигнал ошибки раскладываются на наборы сигналов подполос. Эта компоновка, конечно, может быть расширена до многоканальной конфигурации.
Вектор  опорного сигнала подполосы и сигнал
опорного сигнала подполосы и сигнал  ошибки выражены в качестве
ошибки выражены в качестве
 (1)
(1)
 (2),
(2),
где  , коэффициент
, коэффициент  прореживания, N - длина полнополосного адаптивного фильтра, а K - количество весов для каждого адаптивного фильтра
прореживания, N - длина полнополосного адаптивного фильтра, а K - количество весов для каждого адаптивного фильтра  подполосы.
подполосы.
В результате коэффициента прореживания,  , все веса адаптивного фильтра подполосы обновляются каждые отсчетов. И полная полоса
, все веса адаптивного фильтра подполосы обновляются каждые отсчетов. И полная полоса  раскладывается на набор функций
раскладывается на набор функций  подполос. Эти передаточные функции подполос могут оцениваться с использованием автономного или интерактивного подходов идентификации системы, в которых генератор широкополосного шума может быть разложен на соответствующие подполосы. Отсюда, фильтрованный опорный сигнал в каждой подполосе имеет значение
подполос. Эти передаточные функции подполос могут оцениваться с использованием автономного или интерактивного подходов идентификации системы, в которых генератор широкополосного шума может быть разложен на соответствующие подполосы. Отсюда, фильтрованный опорный сигнал в каждой подполосе имеет значение
 (3)
(3)
где  обозначает обработку сверткой.
обозначает обработку сверткой.
Адаптивный фильтр m-ой подполосы может обновляться с использованием алгоритма комплексной нормированной среднеквадратической ошибки в качестве
 (4),
(4),
где  - адаптивный вектор весов подполосы для
- адаптивный вектор весов подполосы для  -ой подполосы, а
-ой подполосы, а  - малое постоянное значение для избегания бесконечного размера шага. Затем, эти адаптивные веса подполосы преобразуются в полную полосу с помощью схемы преобразования весов. Есть несколько технологий преобразования весов, известных в данной области техники. Здесь, способ наложения БПФ перенят и получает полнополосный адаптивный вес.
- малое постоянное значение для избегания бесконечного размера шага. Затем, эти адаптивные веса подполосы преобразуются в полную полосу с помощью схемы преобразования весов. Есть несколько технологий преобразования весов, известных в данной области техники. Здесь, способ наложения БПФ перенят и получает полнополосный адаптивный вес.
В безынерционном алгоритме с делением на подполосы, полнополосный сигнал раскладывается на сигналы подполос, которые выводят набор адаптивных подфильтров. И эта обработка главным образом зависит от характеристик гребенки фильтров анализа. В настоящее время, гребенка фильтров анализа главным образом основана на многочастотных технологиях обработки сигналов, и другие подходы с гребенками фильтров были разработаны на протяжении последних двадцати лет. Среди этих гребенок фильтров, популярна гребенка фильтров с косинусной модуляцией, так как она легка для реализации и дает превосходную реконструкцию. И многофазная гребенка фильтров ДПФ является еще одной популярной гребенкой фильтров, которая дает высокую вычислительную эффективность и простую конструкцию. Для безынерционного алгоритма с делением на подполосы, гребенка фильтров ДПФ выбрана вследствие некоторых ключевых преимуществ в конструкции фильтра и вычислительной эффективности.
КОНСТРУКЦИЯ РАВНОМЕРНОЙ ГРЕБЕНКИ ФИЛЬТРОВ АНАЛИЗА ДПФ
Фиг. 2 показывает конструкцию равномерной гребенки 36 фильтров ДПФ с некоторым количеством M подполос 38. Гребенка 36 фильтров DFT может использоваться в контексте системы 12 ANC по фиг. 1, например, вместо гребенки 20 фильтров анализа, и выводиться из прототипного фильтра  с помощью модуляции. Более точно, гребенка 36 фильтров анализа M подполос 38 получается с помощью комплексной модуляции в следующем уравнении:
с помощью модуляции. Более точно, гребенка 36 фильтров анализа M подполос 38 получается с помощью комплексной модуляции в следующем уравнении:
 (5),
(5),
где - вещественнозначный прототипный фильтр нижних частот с частотой среза  . Затем, подвергнутые комплексной модуляции фильтры
. Затем, подвергнутые комплексной модуляции фильтры  40 получаются посредством сдвига фильтра нижних частот вправо на кратные значения
40 получаются посредством сдвига фильтра нижних частот вправо на кратные значения  . Поэтому, равномерная гребенка 36 фильтров ДПФ может делить нормированный диапазон частот от 0 до
. Поэтому, равномерная гребенка 36 фильтров ДПФ может делить нормированный диапазон частот от 0 до  на M подполос 38 с расстоянием между смежными фильтрами 40.
на M подполос 38 с расстоянием между смежными фильтрами 40.
Фиг. 3A и 3B показывают равномерную гребенку фильтров анализа ДПФ, построенный для разных количеств M подполос. Как показано для разных количеств M подполос, просачивание спектральных составляющих в смежные подполосы неизбежно и будет приводить к эффекту наложения спектров. При увеличении количества подполос, по-прежнему есть просачивание между подполосами. Значит, равномерная гребенка фильтров ДПФ страдает от того обстоятельства, что она не способна гасить составляющие наложения спектров, вызванные неотъемлемым недостатком равномерной гребенки фильтров ДПФ. Таким образом, цель конструкции гребенки фильтров ДПФ может состоять в том, чтобы минимизировать или ограничить просачивание спектральных составляющих, для того чтобы устранить эффект наложения спектров. Новая конструкция гребенки фильтров ДПФ, неравномерная гребенка фильтров ДПФ, представлена здесь для преодоления недостатка с помощью структуры с присущим ей гашением спектров наложения.
КОНСТРУКЦИЯ ГРЕБЕНКИ ФИЛЬТРОВ АНАЛИЗА ДПФ С ПЕРЕМЕННОЙ ШИРИНОЙ ПОЛОСЫ ПРОПУСКАНИЯ
Гребенка фильтров анализа ДПФ с переменной шириной полосы пропускания основана на предложенной ранее неравномерной гребенке фильтров анализа ДПФ. Другие способы с неравномерными подполосами, такие как неравномерные гребенки псевдоквадратурных зеркальных фильтров (QMF) и гребенки фильтров ДПФ с всеканальным преобразованием, имеют неотъемлемые ограничения. Например, неравномерное псевдо-QMF используется только в традиционном алгоритме с делением на полосы, которому нужны фильтры как анализа, так и синтеза, что считается неуместным для безынерционного алгоритма с делением на подполосы. К тому же, гребенка фильтров ДПФ с всеканальным преобразованием реализуется всего лишь посредством изменения ширин полос пропускания, что не устраняет эффект наложения спектров.
Фиг. 4 показывает примерную структуру гребенки 42 фильтров анализа ДПФ с переменной шириной полосы пропускания. Гребенка 42 фильтров анализа ДПФ с переменной шириной полосы пропускания может использоваться в контексте системы 12 ANC по фиг. 1, например, вместо гребенки 20 фильтров анализа, и т. д. Что касается этой гребенки фильтров, используются два разных прототипных фильтра  и
и  . Прототипные фильтры и реализуют классический способ конструкции оконного линейно-фазового цифрового фильтра с конечной импульсной характеристикой (КИХ, FIR). Они проектировались с использованием встроенной в MATLAB функции:
. Прототипные фильтры и реализуют классический способ конструкции оконного линейно-фазового цифрового фильтра с конечной импульсной характеристикой (КИХ, FIR). Они проектировались с использованием встроенной в MATLAB функции:
 (6),
(6),
 (7),
(7),
где  - порядок прототипного фильтра,
- порядок прототипного фильтра,  - количество равномерных гребенок фильтров с делением на подполосы,
- количество равномерных гребенок фильтров с делением на подполосы,  - постоянный коэффициент, который равен
- постоянный коэффициент, который равен  , а
, а  - коэффициент переменной ширины полосы пропускания, который находится между
- коэффициент переменной ширины полосы пропускания, который находится между  и . Здесь, установлено в качестве равного .
и . Здесь, установлено в качестве равного .
Первый прототипный фильтр является вещественнозначным фильтром нижних частот с частотой среза  для получения всех подполос с нечетными номерами наряду с тем, что второй прототипный фильтр является вещественнозначным фильтром нижних частот с частотой среза
для получения всех подполос с нечетными номерами наряду с тем, что второй прототипный фильтр является вещественнозначным фильтром нижних частот с частотой среза  для получения всех подполос с четными номерами. Более точно, гребенки
для получения всех подполос с четными номерами. Более точно, гребенки  фильтров анализа гребенок фильтров ДПФ с делением на -подполос и переменной шириной полосы пропускания получены с помощью комплексной модуляции в следующем уравнении:
фильтров анализа гребенок фильтров ДПФ с делением на -подполос и переменной шириной полосы пропускания получены с помощью комплексной модуляции в следующем уравнении:
 (8)
(8)
Затем, подвергнутые комплексной модуляции фильтры  44 получаются посредством сдвига двух фильтров
44 получаются посредством сдвига двух фильтров  и
и  нижних частот вправо на кратные значения . Поэтому, гребенка 42 фильтров ДПФ с переменной шириной полосы пропускания может делить нормированный диапазон частот от 0 до на 2M подполос 46.
нижних частот вправо на кратные значения . Поэтому, гребенка 42 фильтров ДПФ с переменной шириной полосы пропускания может делить нормированный диапазон частот от 0 до на 2M подполос 46.
Фиг. 5A и 5B показывают конструкцию гребенки фильтров анализа ДПФ с переменной шириной полосы пропускания для разных количеств подполос. Здесь, β равно 1/2M, и четный порядок  (
( ) суммируется между фильтрами (
) суммируется между фильтрами ( ). Она может покрывать просачивание спектральных составляющих между смежными фильтрами нечетного порядка. Поэтому, гребенки фильтров анализа ДПФ с переменной шириной полосы пропускания может избегать и ограничивать эффект наложения спектров в безынерционном алгоритме с делением на подполосы.
). Она может покрывать просачивание спектральных составляющих между смежными фильтрами нечетного порядка. Поэтому, гребенки фильтров анализа ДПФ с переменной шириной полосы пропускания может избегать и ограничивать эффект наложения спектров в безынерционном алгоритме с делением на подполосы.
ВЫЧИСЛИТЕЛЬНАЯ СЛОЖНОСТЬ
Этот раздел оценивает вычислительную сложность равномерного и неравномерного безынерционных алгоритмов с делением на подполосы. Вычислительные требования алгоритмов могут быть разделены на пять частей: 1) операцию гребенки фильтров, 2) адаптацию весов подполосы, 3) полнополосную фильтрацию, 4) преобразование весов и 5) фильтрацию опорного сигнала. Ради удобства, вычислительная сложность основана на количестве умножений на каждый входной отсчет. Вычислительная сложность обобщена в таблице 1.









В этой таблице,  - длина полнополосного адаптивного фильтра, - количество весов для каждого адаптивного фильтра подполосы, а L - длина фильтра
- длина полнополосного адаптивного фильтра, - количество весов для каждого адаптивного фильтра подполосы, а L - длина фильтра  оценки вторичного тракта. Поэтому, известно, что требуемое суммарное количество умножений равномерного безынерционного алгоритма Моргана с делением на подполосы должны иметь значение
оценки вторичного тракта. Поэтому, известно, что требуемое суммарное количество умножений равномерного безынерционного алгоритма Моргана с делением на подполосы должны иметь значение
 (9),
(9),
где J - переменная, которая определяет, как часто выполняется преобразование весов. Безынерционный алгоритм с делением на подполосы не демонстрирует серьезного ухудшения производительности для значений J в диапазоне от одного до девяти. Должно быть отмечено, что иные вычисления требуются для предложенного безынерционного алгоритма Моргана с делением на полосы и переменной шириной полосы пропускания.
Количество вычислений для фильтрации подполосы опорного сигнала и сигнала ошибки имеет значение
 (10)
(10)
Здесь, для реальных сигналов, необходимо, чтобы обрабатывалось только  комплексных подполос. Таким образом, обновление весов подполосы требует
комплексных подполос. Таким образом, обновление весов подполосы требует
 (11)
(11)
Для преобразования веса подполосы в полнополосные веса, обработка преобразования весов требует
 (12)
(12)
Здесь, выходные данные адаптивного фильтра будут иметь вычислительную стоимость  . При условии, что вторичный тракт моделируется КИХ-фильтром
. При условии, что вторичный тракт моделируется КИХ-фильтром  -ого порядка, формирование фильтрованного опорного сигнала требует
-ого порядка, формирование фильтрованного опорного сигнала требует
 (13)
(13)
Поэтому, требуемое суммарное количество умножений и сложений безынерционного алгоритма Моргана с делением на подполосы и переменной шириной полосы пропускания имеет значение
 (14)
(14)
Фиг. 6 показывает сравнение нормированной вычислительной сложности этих основанных на подполосах алгоритмов сверх традиционного алгоритма FXLMS. Здесь, длина полнополосного адаптивного фильтра имеет значение 512 отводов, длина оцененного вторичного тракта L имеет значение 256 отводов, а количество подполос M имеет значение, соответственно, 8, 16, 32, 64 и 128. Как показано на фиг. 6, вычислительная сложность этих двух алгоритмов уменьшается по мере того, как увеличивается количество подполос M. В дополнение, безынерционный алгоритм с делением на подполосы и переменной шириной полосы пропускания имеет более низкую вычислительную сложность, чем равномерный безынерционный алгоритм Моргана с делением на подполосы. Поэтому, безынерционный алгоритм с делением на подполосы и переменной шириной полосы пропускания дополнительно будет снижать вычислительную стоимость по мере того, как возрастает количество подполос.
ЧИСЛЕННОЕ МОДЕЛИРОВАНИЕ
Для того чтобы оценить рабочие характеристики предложенных алгоритмов, проводились всесторонние численные моделирования. В первом наборе моделирований, возмущения широкополосного белого шума синтезировались в MATLAB. И известные первичный тракт и вторичный тракт  используются, поскольку они получили широкое применение в основанных на моделировании исследованиях ANC. Частотные характеристики и вторичные ответы первичного тракта и вторичного тракта показаны на фиг. 7A и 7B. Первичный и вторичный тракты моделировались с использованием 256-отводного КИХ-фильтра. Во втором моделировании, экспериментальные данные шума от движения по дороге транспортного средства использовались для дополнительной проверки производительности безынерционного алгоритма с делением на подполосы и переменной шириной полосы пропускания. Для демонстрационных целей, использовались разные количества подполос M. Имитационные моделирования проводились с равномерным и с переменной шириной полосы пропускания безынерционными алгоритмами с делением на подполосы для разных количеств подполос.
используются, поскольку они получили широкое применение в основанных на моделировании исследованиях ANC. Частотные характеристики и вторичные ответы первичного тракта и вторичного тракта показаны на фиг. 7A и 7B. Первичный и вторичный тракты моделировались с использованием 256-отводного КИХ-фильтра. Во втором моделировании, экспериментальные данные шума от движения по дороге транспортного средства использовались для дополнительной проверки производительности безынерционного алгоритма с делением на подполосы и переменной шириной полосы пропускания. Для демонстрационных целей, использовались разные количества подполос M. Имитационные моделирования проводились с равномерным и с переменной шириной полосы пропускания безынерционными алгоритмами с делением на подполосы для разных количеств подполос.
Результаты моделирований представлены на фиг. 8A-8D. Использовались разные количества подполос ( ). Равномерный безынерционный алгоритм с делением на подполосы имеет серьезное наложение спектров в спектрах остаточного сигнала ошибки, которое вызвано конструкцией равномерной гребенки фильтров анализа ДПФ. И при увеличении количества подполос, эффект наложения спектров не может избегаться. Когда использовался безынерционный алгоритм с делением на подполосы с переменной шириной полосы пропускания, он ограничивал эффект наложения спектров и сохранял лучшие рабочие характеристики по просачиванию спектральных составляющих наряду с сохранением производительности равномерного безынерционного алгоритма с делением на подполосы. Эти результаты демонстрируют, что использование предложенной системы дает осуществимый алгоритм для ограничения и избегания эффекта наложения спектров.
). Равномерный безынерционный алгоритм с делением на подполосы имеет серьезное наложение спектров в спектрах остаточного сигнала ошибки, которое вызвано конструкцией равномерной гребенки фильтров анализа ДПФ. И при увеличении количества подполос, эффект наложения спектров не может избегаться. Когда использовался безынерционный алгоритм с делением на подполосы с переменной шириной полосы пропускания, он ограничивал эффект наложения спектров и сохранял лучшие рабочие характеристики по просачиванию спектральных составляющих наряду с сохранением производительности равномерного безынерционного алгоритма с делением на подполосы. Эти результаты демонстрируют, что использование предложенной системы дает осуществимый алгоритм для ограничения и избегания эффекта наложения спектров.
Фиг. 9A и 9B показывают спектры ошибок (бетонной дороги) до и после схождения для равномерного и с переменной шириной полосы пропускания безынерционных алгоритмов с делением на подполосы, использующих разные количества подполос. Подобным образом, фиг. 10A и 10B показывают спектры ошибок (неровной дороги) до и после схождения для равномерного и с переменной шириной полосы пропускания безынерционных алгоритмов с делением на подполосы, использующих разные количества подполос (бетонной дороги). Может быть видно, что равномерный и с переменной шириной полосы пропускания безынерционные алгоритмы с делением на подполосы имеют сходные рабочие характеристики на большинстве частот. Однако, вследствие недостатков равномерной гребенки фильтров ДПФ, гребенка фильтров анализа ДПФ с переменной шириной полосы пропускания достигала меньшего уменьшения промежутков между смежными подполосами, чем равномерный алгоритм с делением на подполосы. Более того, моделирования с разными данными показали, что алгоритм с делением на подполосы и переменной шириной полосы пропускания эффективен при сохранении рабочих характеристик производительности равномерного безынерционного алгоритма с делением на подполосы и ограничении эффекта наложения спектров в просачивании спектральных составляющих.
Последовательности операций, способы или алгоритмы, раскрытые в материалах настоящей заявки, могут быть подлежащими выполнению или реализованы устройством обработки, контроллером или компьютером, которые могут включать в себя существующий программируемый электронный блок управления или специальный электронный блок управления. Подобным образом, последовательности операций, способы или алгоритмы могут храниться в качестве данных и команд, исполняемых контроллером или компьютером, в многих формах, в том числе, но не в качестве ограничения, информации, постоянно хранимой на незаписываемом запоминающем носителе, таком как устройства ПЗУ (постоянного запоминающего устройства, ROM), и информации, с возможностью изменения хранимой на записываемом запоминающем носителе, таком как гибкие диски, магнитные ленты, CD (компакт-диски), устройства ОЗУ (оперативного запоминающего устройства, RAM) и другие магнитные и оптические носители. Последовательности операций, способы или алгоритмы также могут быть реализованы в программном исполняемом объекте. В качестве альтернативы, последовательности операций, способы или алгоритмы могут быть воплощены полностью или частично с использованием пригодных аппаратных компонентов, таких как специализированные интегральные схемы (ASIC), программируемые пользователем вентильные матрицы (FPGA), конечные автоматы, контроллеры или другие аппаратные компоненты или устройства, или комбинации аппаратных средств, программных средств и программно-аппаратных компонентов.
Словесные формулировки, используемые в описании изобретения, предпочтительнее являются словесными формулировками описания, нежели ограничением, и понятно, что различные изменения могут быть произведены, не выходя из сущности и объема раскрытия. Как описано ранее, признаки различных вариантов осуществления могут комбинироваться для формирования дополнительных вариантов осуществления изобретения, которые могут не быть описаны или проиллюстрированы в прямой форме. Несмотря на то, что различные варианты осуществления могли бы быть описаны в качестве обеспечивающих преимущества или являющихся предпочтительными над другими вариантами осуществления или реализациями предшествующего уровня техники, что касается одной или более требуемых характеристик, специалисты в данной области техники должны осознавать, что один или более признаков или характеристик могут быть скомпрометированы для достижения требуемых общих свойств системы, которые зависят от конкретных применения и реализации. Эти свойства могут включать в себя, но не в качестве ограничения: себестоимость, прочность, надежность, затраты в течение жизненного цикла, пригодность для продажи, внешний вид, упаковку, габариты, ремонтопригодность, вес, технологичность, легкость сборки, и т. д. По существу, варианты осуществления, описанные в качестве менее желательных, чем другие варианты осуществления, или реализации предшествующего уровня техники по отношению к одной или более характеристик, не выходят за пределы объема раскрытия и могут быть желательными для конкретных применений.
Изобретение относится к акустике, в частности к устройствам активного шумоподавления. Устройство содержит опорные датчики, громкоговоритель, микрофон, процессор, гребенку фильтров, средство вычисления минимальной среднеквадратичной ошибки, блока быстрого преобразования Фурье, блока наложения спектров, блока обратного преобразования Фурье, адаптивного фильтра. Процессор выполнен с возможностью исполнять безынерционный алгоритм подавления по минимальной среднеквадратической ошибке с фильтрацией опорного сигнала и делением на подполосы для обработки опорных сигналов широкополосного белого шума и генерации выходного сигнала, обладающего равномерной спектральной характеристикой на всем диапазоне частот, определенном упомянутыми подполосами, чтобы частично гасить шум от движения по дороге посредством громкоговорителя. При этом опорные датчики выполнены с возможностью детектирования опорных сигналов широкополосного белого шума, указывающих шум от движения по дороге. Технический результат – повышение быстродействия с одновременным уменьшением вычислительной сложности и предотвращением перекрытия спектров сигналов. 3 н. и 9 з.п. ф-лы, 18 ил., 1 табл.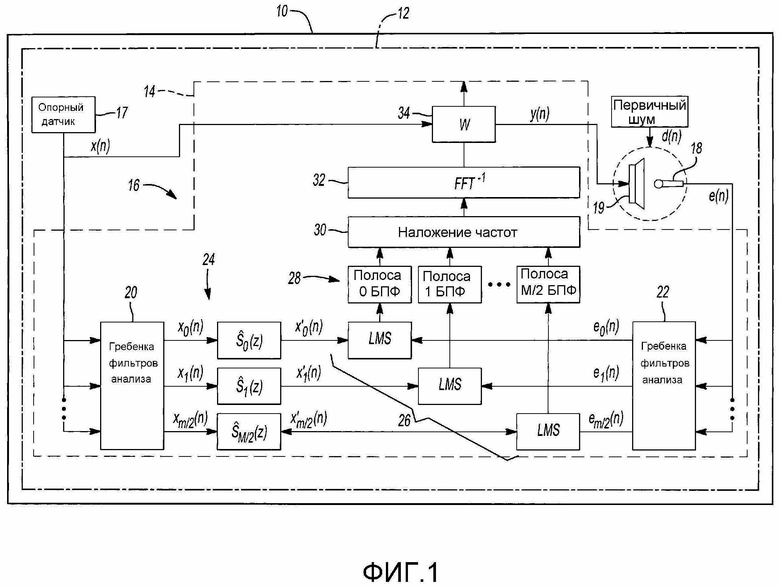
1. Система активного подавления шума для транспортного средства, содержащая:
громкоговоритель;
датчики, выполненные с возможностью детектирования опорных сигналов широкополосного белого шума, указывающих шум от движения по дороге; и
процессор, включающий в себя безынерционный алгоритм подавления по минимальной среднеквадратической ошибке с фильтрацией опорного сигнала и делением на подполосы, который содержит гребенку фильтров дискретного преобразования Фурье с переменной шириной полосы пропускания, имеющую некоторое количество подполос, при этом процессор выполнен с возможностью исполнять безынерционный алгоритм подавления по минимальной среднеквадратической ошибке с фильтрацией опорного сигнала и делением на подполосы для обработки опорных сигналов широкополосного белого шума и генерации выходного сигнала, обладающего равномерной спектральной характеристикой на всем диапазоне частот, определенном упомянутыми подполосами, чтобы частично гасить шум от движения по дороге посредством громкоговорителя.
2. Система по п. 1, в которой безынерционный алгоритм подавления по минимальной среднеквадратической ошибке с фильтрацией опорного сигнала и делением на подполосы содержит равномерную гребенку фильтров и при этом центральные частоты гребенки фильтров дискретного преобразования Фурье с переменной шириной полосы смещены от центральных частот равномерной гребенки фильтров на половину ширины полосы пропускания равномерной гребенки фильтров.
3. Система по п. 2, в которой ширина полосы пропускания гребенки фильтров дискретного преобразования Фурье с переменной шириной полосы пропускания является меньшей, чем ширина полосы пропускания равномерной гребенки фильтров.
4. Система по п. 2, в которой ширина полосы пропускания гребенки фильтров дискретного преобразования Фурье с переменной шириной полосы пропускания имеет значение по меньшей мере половины ширины полосы пропускания равномерной гребенки фильтров.
5. Способ активного подавления шума в системе активного подавления шума (ANC), содержащей громкоговоритель, датчики и один или более процессоров, включающих в себя безынерционный алгоритм подавления по минимальной среднеквадратической ошибке с фильтрацией опорного сигнала и делением на подполосы, который содержит гребенку фильтров дискретного преобразования Фурье с переменной шириной полосы пропускания, имеющую некоторое количество подполос, при этом упомянутый способ содержит этапы, на которых:
детектируют датчиками опорные сигналы широкополосного белого шума, указывающие шум от движения по дороге и имеющие слышимый диапазон частот от 20 Гц до 20 кГц; и
исполняют одним или более процессорами безынерционный алгоритм подавления по минимальной среднеквадратической ошибке с фильтрацией опорного сигнала и делением на подполосы для обработки опорных сигналов широкополосного белого шума и генерации выходного сигнала, обладающего равномерной спектральной характеристикой на всем диапазоне частот, определенном подполосами, чтобы частично гасить шум от движения по дороге посредством громкоговорителя.
6. Способ по п. 5, в котором безынерционный алгоритм подавления по минимальной среднеквадратической ошибке с фильтрацией опорного сигнала и делением на подполосы содержит равномерную гребенку фильтров и при этом центральные частоты гребенки фильтров дискретного преобразования Фурье с переменной шириной полосы пропускания смещены от центральных частот равномерной гребенки фильтров на половину ширины полосы пропускания равномерной гребенки фильтров.
7. Способ по п. 6, в котором ширина полосы пропускания гребенки фильтров дискретного преобразования Фурье с переменной шириной полосы пропускания является меньшей, чем ширина полосы пропускания равномерной гребенки фильтров.
8. Способ по п. 7, в котором ширина полосы пропускания гребенки фильтров дискретного преобразования Фурье с переменной шириной полосы пропускания имеет значение по меньшей мере половины ширины полосы пропускания равномерной гребенки фильтров.
9. Система активного подавления шума (ANC), содержащая:
громкоговоритель;
датчики, выполненные с возможностью детектирования опорных сигналов широкополосного белого шума, указывающих шум от движения по дороге; и
один или более процессоров, включающих в себя безынерционный алгоритм подавления по минимальной среднеквадратической ошибке с фильтрацией опорного сигнала и делением на подполосы, который содержит гребенку фильтров дискретного преобразования Фурье с переменной шириной полосы пропускания, имеющую некоторое количество подполос, причем один или более процессоров выполнены с возможностью исполнять безынерционный алгоритм подавления по минимальной среднеквадратической ошибке с фильтрацией опорного сигнала и делением на подполосы для обработки опорных сигналов широкополосного белого шума и генерации выходного сигнала, обладающего равномерной спектральной характеристикой на всем диапазоне частот, определенном подполосами, чтобы частично гасить шум от движения по дороге посредством громкоговорителя.
10. Система по п. 9, в которой безынерционный алгоритм подавления по минимальной среднеквадратической ошибке с фильтрацией опорного сигнала и делением на подполосы содержит равномерную гребенку фильтров, и при этом центральные частоты гребенки фильтров дискретного преобразования Фурье с переменной шириной полосы пропускания смещены от центральных частот равномерной гребенки фильтров на половину ширины полосы пропускания равномерной гребенки фильтров.
11. Система по п. 10, в которой ширина полосы пропускания гребенки фильтров дискретного преобразования Фурье с переменной шириной полосы пропускания является меньшей, чем ширина полосы пропускания равномерной гребенки фильтров.
12. Система по п. 10, в которой ширина полосы пропускания гребенки фильтров дискретного преобразования Фурье с переменной шириной полосы пропускания имеет значение по меньшей мере половины ширины полосы пропускания равномерной гребенки фильтров.
| Jie Duan | |||
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Регулятор для ветряного двигателя в ветроэлектрических установках | 1921 |
|
SU136A1 |
| Dennis R | |||
| Morgan A Delayless Subband Adaptive Filter Architecture // IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL | |||
| Зубчатое колесо со сменным зубчатым ободом | 1922 |
|
SU43A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Enisa Galijaievic | |||
| DESIGN OF ALLPASS-BASED NON-UNIFORM OVERSAMPLED DFT FILTER BANKS // IEEE International Conference on Acoustics, Speech, and Signal Processing, 2002 | |||
| US 6970558 B1, 29.11.2005 | |||
| US 8600069 B2, 03.12.2013 | |||
| DE 102012200142 A1, 05.07.2012 | |||
| US 5329587 A, 12.07.1994. | |||

