Область техники, к которой относится изобретение
[0001] Данная заявка относится к системам активного шумоподавления транспортного средства.
Уровень техники
[0002] В кабине транспортного средства присутствует несколько источников шумов, таких как трансмиссия, шум от взаимодействия шин с дорогой, ветер и различные электрические компоненты. Шум от трансмиссии обычно является преобладающим, когда двигатель находится в режиме холостого хода или переключении передач. С другой стороны, преобладающим внутри транспортного средства шумом является переносимый конструкцией дорожный шум при езде со скоростью более 30-40 км/ч. Эти шумы являются первичным возмущающим воздействием, которое может раздражать пассажиров и влиять на воспринимаемое качество функционирования транспортного средства. В связи с этим некоторые производители автомобилей улучшают функционирование транспортного средства относительно шума, вибрации и неплавности движения (noise, vibration and harshness, NVH) для удовлетворения требованиям пользователей.
Раскрытие изобретения
[0003] В одном примере в качестве основы для системы активного шумоподавления (active noise control, ANC) с целью обработки дорожного шума с ударами предложен расширенный субполосный алгоритм наименьшей средней M-оценки с x-фильтрацией (filtered-x least mean M-estimator, FXLMM) с пороговыми величинами на трактах опорного сигнала и сигнала ошибки. Данный алгоритм может преодолевать такие присущие стандартному алгоритму наименьшего среднего квадрата с x-фильтрацией (filtered-x least mean square, FXLMS) ограничения для управления цветным шумом, как высокие вычислительные затраты и низкая скорость сходимости. Кроме того, становится возможным избегание проблем нестабильности алгоритма FXLMS для негауссового ударного дорожного шума из-за бугров или выбоин на дороге.
[0004] В другом примере транспортное средство включает в себя систему активного шумоподавления (ANC). Система ANC включает в себя процессор для реализации адаптивного субполосного алгоритма управления с фильтрацией опорного сигнала, который применяет пороговые величины к трактам сигнала обратной связи ошибки и опорного сигнала так, чтобы, в ответ на последовательность широкополосных негауссовых импульсных опорных сигналов, указывающих дорожный шум в транспортном средстве, весовые коэффициенты задавали адаптивный фильтр схождения алгоритма управления, и позволения системе ANC частично подавлять дорожный шум. Значения пороговых величин могут быть основаны на отклонении амплитуд импульсных опорных сигналов. Данные значения могут увеличиваться с увеличением отклонения. Значения пороговых величин могут быть основаны на процентильных характеристиках импульсных опорных сигналов. Адаптивный субполосный алгоритм управления с фильтрацией опорного сигнала может быть безынерционным. Адаптивный субполосный алгоритм управления с фильтрацией опорного сигнала может быть адаптивным субполосным алгоритмом управления с фильтрацией опорного сигнала по критерию наименьшего среднего квадрата с x-фильтрацией (filtered-x least mean square, FXLMS) или адаптивным субполосным алгоритмом управления с фильтрацией опорного сигнала по критерию наименьшей средней M-оценки с x-фильтрацией (filtered-x least mean M-estimator, FXLMM). Адаптивный субполосный алгоритм управления с фильтрацией опорного сигнала может включать в себя набор фильтров дискретного преобразования Фурье (discrete Fourier transform, DFT (ДПФ)). В данном документе также описаны и другие примеры.
Краткое описание чертежей
[0005] На Фигуре 1 изображена схема управления с прямой связью, сконфигурированная с модифицированным субполосным алгоритмом FXLMS с пороговыми величинами, в контексте системы активного шумоподавления для транспортного средства.
[0006] На Фигуре 2 изображен график функций количественного оценивания для различных M-оценок.
[0007] На Фигуре 3 изображена диаграмма размаха и функция распределения вероятностей (probability distribution function, PDF) гауссова набора данных.
[0008] На Фигуре 4 изображена блок-схема последовательности операций в системе активного шумоподавления (ANC) с пороговой величиной для ударного дорожного шума.
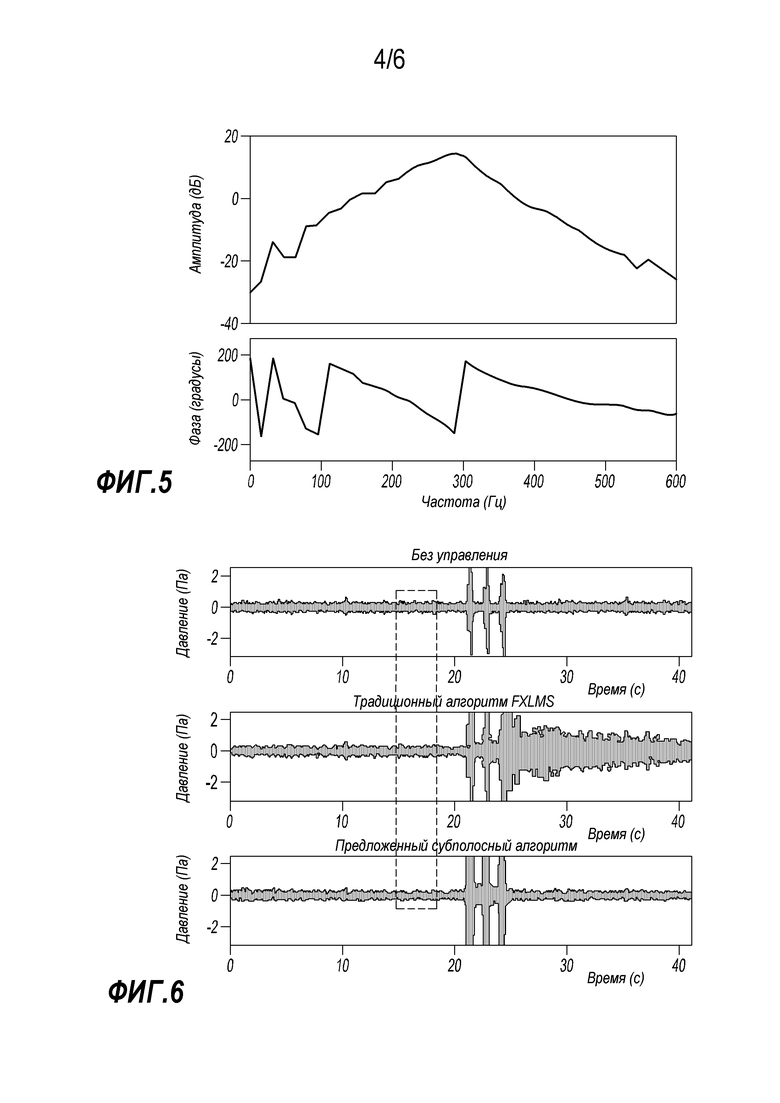
[0009] На Фигуре 5 изображен график амплитудно-фазовой характеристики вторичного тракта.
[0010] На Фигуре 6 изображен график динамики изменения управляемого результата для нормального дорожного шума с тремя событиями удара.
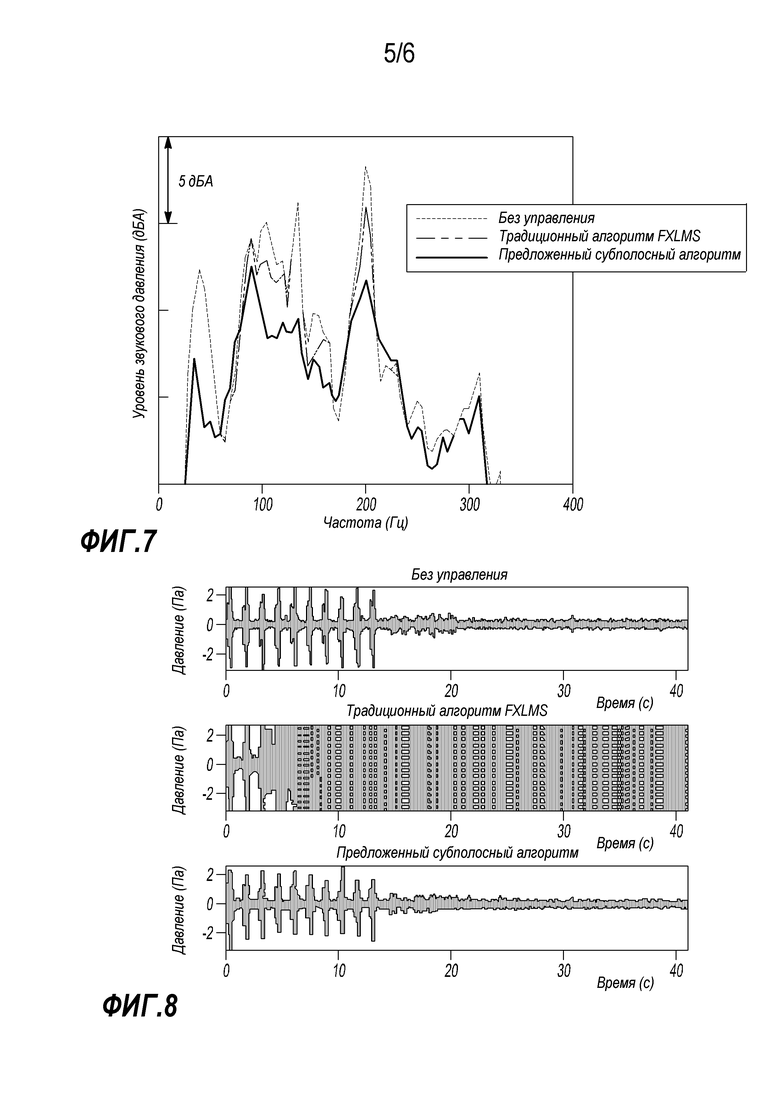
[0011] На Фигуре 7 изображен график частотного спектра нормального дорожного шума до и после управления в пунктирном блоке на Фигуре 5.
[0012] На Фигуре 8 изображен график динамики изменения управляемого результата для нормального дорожного шума и десяти событий удара.
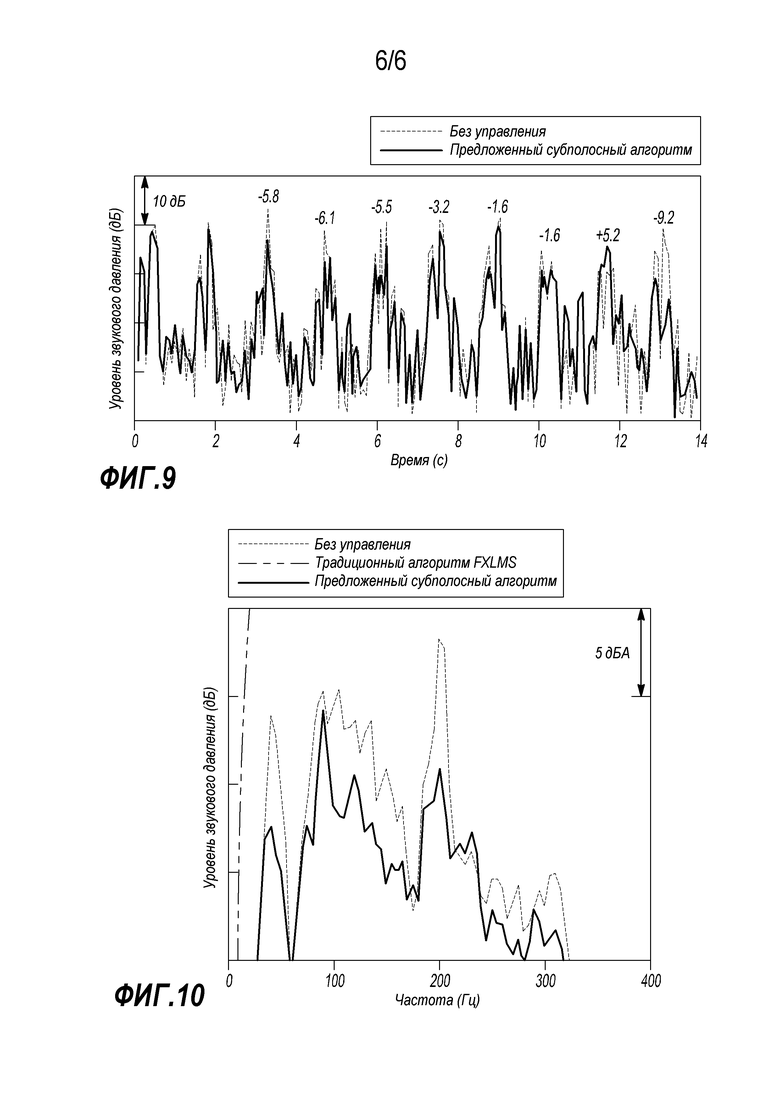
[0013] На Фигуре 9 изображен график уровня звукового давления этих десяти ударных дорожных шумов до и после управления.
[0014] На Фигуре 10 изображен график спектра нормального дорожного шума до и после управления за последние 2 секунды на Фигуре 8.
Подробное описание
[0015] В данном документе описаны варианты осуществления настоящего раскрытия. Однако, следует понимать, что раскрытые варианты осуществления представляют собой всего лишь примеры, и другие варианты осуществления могут принимать различные и альтернативные формы. Фигуры не обязательно выполнены с соблюдением масштаба; с целью изображения подробностей конкретных компонентов некоторые признаки могут быть преувеличены или минимизированы. Поэтому, конкретные структурные и функциональные подробности, раскрытые в данном документе, не следует интерпретировать как ограничивающие, а следует интерпретировать всего лишь в качестве демонстрационной базы, чтобы научить специалиста в данной области техники по-разному использовать настоящее изобретение. Как должно быть понятным средним специалистам в уровне техники, различные признаки, изображенные и описанные со ссылкой на любую из фигур, могут быть объединены с признаками, изображенными на одной или более других фигурах, с целью создания вариантов осуществления, которые явно не изображены или не описаны. Сочетания изображенных признаков предоставляют демонстрационные варианты осуществления для характерных применений. Тем не менее, различные сочетания и модификации признаков в соответствии с идеями данного раскрытия могут быть желательными для конкретных вариантов применений или реализации.
Введение
[0016] Для достижения лучшего функционирования относительно NVH внутри пассажирского отделения обычный подход улучшения, как правило, реализуется посредством добавления больше массы, регулировки жесткости и амортизационных свойств некоторых компонентов и разработки различных типов звукопоглощающих устройств. Однако данная методика ограничена низкочастотными пределами. Альтернативно, технология активного шумоподавления (ANC) продемонстрировала перспективный способ регулировки низкочастотных шумов от трансмиссии и дорожных шумов в кабине транспортного средства.
[0017] Многочисленные программы исследований привели к разработке осуществимой системы ANC для применения в автомобилях, причем эти программы главным образом имеют дело с такими стационарными шумами, как относящийся к трансмиссии шум и нормальный дорожный шум. Более точно, стационарный шум отличается от сильно переходного процесса, который склонен генерировать шумы негауссова типа, такие как ударный дорожный шум транспортного средства. Переносимый конструкцией дорожный шум является цветным широкополосным шумом, большая часть энергии которого находится в низкочастотном диапазоне от 60 до 400 Гц. Следовательно, может быть эффективным проектирование системы ANC с прямой связью для управления дорожным шумом посредством использования акселерометров с целью захвата опорных сигналов в преобладающих переносимых конструкцией трактах. Например, в одном случае предложена многоканальная система ANC, сконфигурированная с традиционным алгоритмом наименьшего среднего квадрата с x-фильтрацией (FXLMS) для низкочастотного шума от двигателя и от дороги. В другом случае разработана система активного акустического управления в конструкции (active structural acoustic control, ASAC) для переносимого конструкцией дорожного шума посредством использования инерционного вибратора в качестве привода управления, прикрепленного параллельно с системой подвески, для изменения вибрационного поведения панели пола транспортного средства так, чтобы излученный шум уменьшался. В последнее время система ANC для управления дорожным шумом была объединена со встроенной в транспортное средство аудиосистемой и системой обратной связи без необходимости в дополнительных опорных акселерометрах. Большинство этих типов систем использует адаптивный алгоритм FXLMS. Однако при непосредственном применении в управлении дорожным шумом традиционный алгоритм FXLMS проявляет неэффективность (например, большую вычислительную нагрузку и медленную скорость сходимости). Это происходит потом к тому, что широкополосному дорожному шуму обычно требуется адаптивный фильтр большего порядка, и заданный размер шага алгоритма FXLMS оказывается не оптимальным для всех частот вследствие большого разброса собственных значений цветного опорного сигнала.
[0018] Основанный на подполосах алгоритм FXLMS является одной альтернативой для преодоления присущих традиционному алгоритму FXLMS ограничений, особенно когда адаптивному фильтру требуются сотни отводов фильтра для широкополосного шума. Идея субполосной адаптивной фильтрации состоит в разложении полнополосного входного опорного сигнала и полнополосного входного сигнала ошибки на некоторое количество подполос и в понижении дискретизации данных субполосных сигналов с более высокой частоты дискретизации до более низкой частоты дискретизации, сокращая тем самым количество весовых коэффициентов адаптивного фильтра, необходимых для каждой полосы. Кроме того, процесс субполосной фильтрации будет выравнивать спектр опорного сигнала в каждой полосе, что обеспечивает меньший динамический диапазон спектра, тем самым значительно улучшая скорость сходимости. Однако, эти ранние субполосные структуры склонны вносить дополнительную задержку в тракт сигнала вследствие реализации двух анализирующих фильтров для разложения упомянутых сигналов на подполосы и один синтезирующий фильтр для объединения субполосных сигналов в полную полосу. В применениях ANC для широкополосного шума данная задержка может значительно ухудшать эффективность сходимости и даже вызывать нестабильность вследствие нарушения непричинной связи. Следовательно, в некоторых случаях предложен безынерционный субполосный адаптивный фильтр, в котором удален синтезирующий фильтр традиционного субполосного алгоритма, а весовые коэффициенты фильтра в каждой полосе объединены и преобразованы во временную область для обновления в каждой точке дискретизации. Также была предложена реализация безынерционного субполосного алгоритма ANC в частотной области. В других случаях, например, разработана объединенная система ANC с прямой связью и обратной связью с использованием методики субполосной обработки дорожного шума внутри транспортного средства. Субполосный алгоритм сбалансировал возможность сходимости по широкополосному частотному диапазону и приближает общее уменьшение к теоретическому значению.
[0019] Несмотря на некоторые многообещающие успехи, о которых сообщалось в открытой литературе, одной из больших проблем для ANC-управления (произвольным по природе) дорожным шумом является неустановившийся процесс для опорных акселерометров и воспринимаемого дорожного шума, на которые легко воздействует неровность дороги. Напротив, система ANC для шума от трансмиссии является более детерминированной, и мониторинг скорости двигателя сигнал тахометра обычно используется в качестве опорного сигнала. Условия, затрудняющие ANC-управление дорожным шумом, включают в себя акустические отклики на удары вследствие таких неровностей или неоднородностей на поверхности дороги, как бугры и выбоины. Эти типы импульсных шумов обычно подчиняются негауссовым статистическим распределениям. Следовательно, традиционный алгоритм FXLMS, предложенный на основе предположения детерминированных и/или гауссовых сигналов, склонен демонстрировать проблему устойчивости для систем ANC. Для решения проблемы, присущей алгоритму FXLMS медленной сходимости для цветного шума, и проблемы его нестабильности для негауссова ударного шума предложены более совершенные системы управления.
[0020] В данном документе раскрыты устойчивые системы ANC для широкополосного дорожного шума с ударами. Расширенный безынерционный субполосный алгоритм, например, внедряет преимущества набора основанных на M-оценке алгоритмов для борьбы с импульсными широкополосными возмущениями. M-оценки являются более устойчивыми для импульсных дискретных отсчетов по сравнению со стандартным L2-указателем, используемым алгоритмом FXLMS. Кроме того, в тракт опорного сигнала может быть включена пороговая величина для дополнительного улучшения устойчивости алгоритма. С целью проверки достоверности эффективности предложенной системы было проведено численное моделирование для управления фактическим ударным дорожным шумом.
[0021] Сначала вносится подробное ответвление общего основанного на подполосах модифицированного алгоритма FXLMM, в котором уравнение обновления весовых коэффициентов фильтра дается в общей форме для количественного определения устойчивости различных функций ошибок M-оценки для импульсных дискретных отсчетов. Кроме того, в тракт опорного сигнала вносится пороговое предельное значение для дополнительного повышения устойчивости процесса обновления весовых коэффициентов адаптивного фильтра так, чтобы избегать возмущающих воздействий пиковых данных. Для определения соответствующих параметров пороговой величины, включенных в каждую функцию устойчивой M-оценки, применяются как реализуемые через сеть в реальном времени, так и реализуемые без подключения к сети подходы. Следовательно, может быть получена быстрая сходимость и достигнуто оптимальное функционирование по более широкому частотному диапазону для управления цветным ударным шумом. С целью проверки достоверности эффективности предложенной системы было проведено численное моделирование для управления измеренными дорожными шумами с ударами.
Контроллер с усовершенствованным субполосным алгоритмом
Алгоритм устойчивой M-оценки
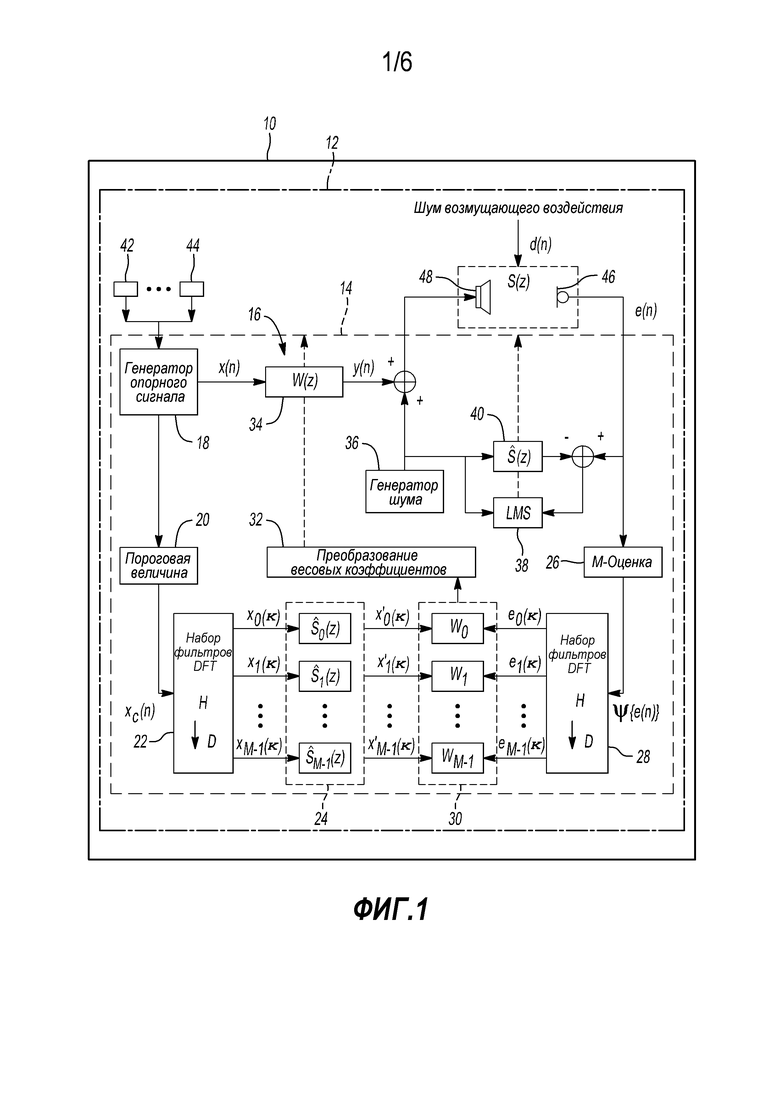
[0022] На Фигуре 1 изображена схема транспортного средства 10, включающего в себя систему 12 активного шумоподавления (ANC). Система 12 ANC, в данном примере, включает в себя по меньшей мере один процессор 14, реализующий блок 16 управления с прямой связью, сконфигурированный с модифицированным субполосным алгоритмом FXLMM с пороговыми величинами. Блок 16 управления с прямой связью, в данном примере, включает в себя блок 18 генератора опорного сигнала, блок 20 пороговой величины, наборы 22 фильтров дискретного преобразование Фурье (Discrete Fourier Transform, DFT) и блоки 24 субполосного вторичного тракта. Блок 16 управления с прямой связью дополнительно включает в себя блок 26 M-оценки, наборы 28 фильтров DFT и блоки 30 обновления весовых коэффициентов фильтров. Блок 16 управления с прямой связью дополнительно включает в себя блок 32 преобразования весовых коэффициентов, блок 34 адаптивного фильтра, блок 36 генератора шума, блок 38 алгоритма наименьшего среднего квадрата (least mean square, LMS) и блок 40 оцененного вторичного тракта. В данном случае, x(n) является опорным сигналом, который может быть захвачен набором акселерометров и/или микрофонов 42-44, d(n) является первичным шумом, захваченным микрофоном 46, а e(n) является сигналом ошибки после наложения первичного шума и вторичного подавляющего шума. Вторичный подавляющий шум выводится в кабину транспортного средства 10 через громкоговоритель 48. Должно быть понято, что данный вариант выполнения может быть расширен до многоканальной конфигурации.
[0023] Стандартный полнополосный алгоритм FXLMS использует опорный сигнал x(n) для адаптивного генерирования вторичного шума, за которым осуществляется наблюдение посредством сигнала ошибки e(n). Однако ему требуется точная модель вторичного передаточного тракта Ŝ от громкоговорителя управления до микрофона ошибки, который может быть оценен посредством использования подходов идентификации через функционирующие без сети или через сеть в реальном времени системы. Уравнения обновления весовых коэффициентов фильтра алгоритма FXLMS могут быть вкратце сформулированы следующим образом:
 (1a)
(1a)
 (1b)
(1b)
 (1c)
(1c)
где μ является размером шага сходимости, и данный размер шага должен быть настроен в блоках 30 обновления весовых коэффициентов фильтра, изображенных на Фиг. 1. Размер шага определяет сходимость и стабильность алгоритма FXLMS, а Ŝ является импульсной характеристикой вторичного тракта S(z). Из Уравнения (1c) можно видеть, что уравнение обновления весового коэффициента фильтра может испытать всплеск в виде большого значения и отклонение при возникновении пиковых импульсов в опорном сигнале и/или сигнале ошибки. Это приводит к нестабильности обычного алгоритма FXLMS при импульсном шуме. В целях улучшения устойчивости традиционного алгоритма FXLMS для импульсных дискретных отсчетов предыдущими исследователями был внедрены несколько подходов либо на основе формулировании более устойчивых критериев ошибки, либо на опирании на простую модификацию алгоритма FXLMS посредством добавления пороговых величин в тракте опорного сигнала и/или сигнала ошибки. В данном документе получает развитие общее семейство усовершенствованных, основанных на M-оценке алгоритмов, которое объединяет все существующие адаптивные алгоритмы для подавления импульсного шума.
[0024] M-оценка является популярным подходом в устойчивой статистике для удаления отрицательного воздействия выбросов в оценочном процессе. Обычный алгоритм наименьшего квадрата, который разработан для минимизации целевой функции  , может стать нестабильным, если данные искажены выбросами. Поэтому стала использоваться функция
, может стать нестабильным, если данные искажены выбросами. Поэтому стала использоваться функция  устойчивой M-оценки с целью замены способа наименьшего квадрата. В данном документе, функция p{e(n)} рассматривается в качестве общего устойчивого представления, которое на выходе дает стабильную оценку для выбросов в обработанных данных.
устойчивой M-оценки с целью замены способа наименьшего квадрата. В данном документе, функция p{e(n)} рассматривается в качестве общего устойчивого представления, которое на выходе дает стабильную оценку для выбросов в обработанных данных.
 (2)
(2)
где p{e(n)} является семейством функций M-оценки. Первая производная целевой функции имеет следующий вид:
 (3)
(3)
где  является функцией количественного оценивания, которая управляет влиянием сигнала ошибки посредством импульсных дискретных отсчетов. Затем применяя наискорейший подходящий алгоритм, уравнение обновления весового коэффициента фильтра семейства основанных на M-оценке алгоритмов выражается следующим образом:
является функцией количественного оценивания, которая управляет влиянием сигнала ошибки посредством импульсных дискретных отсчетов. Затем применяя наискорейший подходящий алгоритм, уравнение обновления весового коэффициента фильтра семейства основанных на M-оценке алгоритмов выражается следующим образом:
 (4)
(4)
Однако, данные импульсы в опорном сигнале по-прежнему могут иметь неблагоприятное влияние на процесс обновления весового коэффициента фильтра для основанных на M-оценке алгоритмов. Несмотря на то, что некоторые из функций  количественного оценивания могут ограничивать импульсные дискретные отсчеты в сигнале ошибки и гарантировать, что весь член
количественного оценивания могут ограничивать импульсные дискретные отсчеты в сигнале ошибки и гарантировать, что весь член  не отклоняется слишком сильно в конкретном временном индексе, он по-прежнему имеет проблемы со стабильностью, так как обычно присутствует некоторая задержка между опорным сигналом и сигналом ошибки. Импульсные дискретные отсчеты в опорном сигнале могут приводить в результате к всплеску члена . Поэтому, для дополнительного увеличения устойчивости при присутствии импульсов предложено семейство усовершенствованных основанных на M-оценке алгоритмов.
не отклоняется слишком сильно в конкретном временном индексе, он по-прежнему имеет проблемы со стабильностью, так как обычно присутствует некоторая задержка между опорным сигналом и сигналом ошибки. Импульсные дискретные отсчеты в опорном сигнале могут приводить в результате к всплеску члена . Поэтому, для дополнительного увеличения устойчивости при присутствии импульсов предложено семейство усовершенствованных основанных на M-оценке алгоритмов.
[0025] Обновление весового коэффициента фильтра модифицированного алгоритма имеет следующий вид:
 (5a)
(5a)
 (5b)
(5b)
Параметры c1 и c2 пороговой величины могут быть оценены посредством вычисляемой без подключения к сети статистики (например, выбирая 1-ый и 99-ый процентиль исходного сигнала).
[0026] В Таблице 1 описаны уравнения обновления весовых коэффициентов адаптивного фильтра предложенного семейства основанных на M-оценке алгоритмов. В данном случае, различные функции количественного оценивания включены в каждый алгоритм для улучшения устойчивости сигнала ошибки для импульсных дискретных отсчетов.

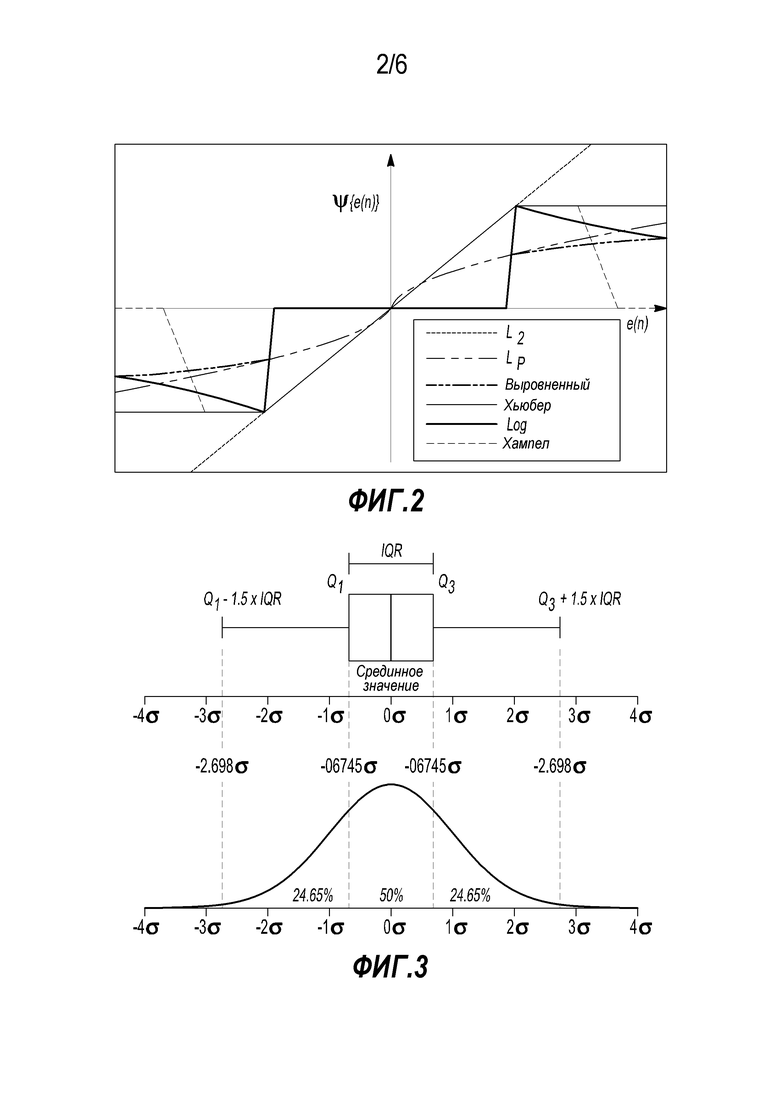
[0027] На Фигуре 2 описаны функции количественного оценивания для всех этих M-оценок. Можно заметить отсутствие каких-либо ограничений в отношении больших импульсных дискретных отсчетов, когда в качестве критерия взято пространство L2 второго порядка. Вот почему традиционный алгоритм FXLMS чувствителен к мгновенному увеличению мощности в сигнале ошибки. Напротив, функции M-оценки вносят ограничения на выбросы функции ошибок. Очевидно, что как основанный на логарифмическом преобразовании алгоритм (FXLogLMS), так и основанный на M-оценке Хампела алгоритм (FXLMM) накладывают «более жесткие» пределы, и функции количественного оценивания более резко убывают до нуля при возникновении импульсов с большими амплитудами. Эти два алгоритма могут быть эффективны для шумов с большими импульсами. Однако логарифмические и содержащие пороговые величины с тремя частями вычисления увеличивают сложность алгоритма. С другой стороны, как M-оценка пространства Lp, так и выровненная M-оценка не обеспечивают жестких границ при возникновении больших дискретных отсчетов. Кроме того, алгоритм FXLMP дает гладкое ограничение функции количественного оценивания. К тому же, функция количественного оценивания Выровненного алгоритма предоставляет лучшее ограничение по сравнению с алгоритмом FXLMP. Очевидно, что Выровненный алгоритм будет проявлять лучшую производительность для шумов с более интенсивными импульсами. Также подмечено, что М-оценка Хьюбера обеспечивает содержащие две части пороговые величины, в которых импульсные дискретные отсчеты заменены пороговыми значениями с верхним и нижним пределами. Функция количественного оценивания функции Хьюбера не убывает до нуля подобно функции логарифмического (Log) пространства и содержащей три части функции Хампела, однако она обеспечивает лучшее ограничение по сравнению с M-оценкой пространства Lp и выровненной M-оценкой.
[0028] Предложенное семейство основанных на устойчивой M-оценке алгоритмов способно повысить устойчивость традиционного алгоритма FXLMS для импульсных дискретных отсчетов. Для борьбы с другими такими присущими алгоритму FXLMS ограничениями, как высокая вычислительная нагрузка и низкая скорость сходимости для цветного шума, внедряется подход субполосной адаптивной фильтрации. Поэтому, предложенный основанный на подполосах модифицированный алгоритм FXLMM с пороговой величиной проявляет себя в качестве более перспективного подхода для разработки устойчивой широкополосной системы ANC.
Субполосная обработка
[0029] Процедура для методики безынерционной субполосной адаптивной фильтрации с модифицированным алгоритмом FXLMM может включать в себя следующее:
1) Полнополосный адаптивный фильтр для обработки входного опорного сигнала
2) Разложение опорного сигнала и сигнала ошибки на подполосы
3) Прореживание в подполосах
4) Обновление весовых коэффициентов фильтра в каждой подполосе
5) Способ комплектования весовых коэффициентов для преобразования субполосных весовых коэффициентов в полную полосу
[0030] Первый этап в реализации субполосного алгоритма заключается в проектировании наборов анализирующих фильтров для разложения входного сигнала. Существуют различные подходы к проектированию этих наборов анализирующих фильтров для разложения опорного сигнала и сигнала ошибки в набор субполосных сигналов. В данном случае внедряются наборы фильтров DFT. Данный подход сначала реализуется посредством проектирования прототипного фильтра низких частот, а затем генерируются другие наборы анализирующих фильтров через комплексную модуляцию. Прототипный фильтр H0 может быть разработан с использованием встроенной в пакет MATLAB функции:
 (6)
(6)
где Lp является порядком прототипного фильтра, а M является количеством наборов субполосных фильтров (следует заметить, что M является четным числом). Затем посредством комплексной модуляции может быть получен другой M - 1 набор [H1, H2, HM-1] фильтров. Процесс модуляции во временной области реализуется следующим образом:
 (7)
(7)
где hm является импульсной характеристикой m-ого набора Hm фильтров, m = 0, 1, …, M - 1, и i является i-ым коэффициентом для hm, i = 0, 1, Lp. Следует отметить, что коэффициенты hm(i) и hM-m(i) являются комплексно-сопряженными с m = 1, 2, M/2 - 1. Следовательно, для вещественных сигналов необходимо обрабатывать только первые M/2 + 1 подполос. Кроме того, центральные частоты этих наборов фильтров равномерно распределены с постоянной шириной полосы. Как таковой субполосный используемый в данном документе алгоритм называется равномерной подполосой. Это прежде всего происходит вследствие процесса модуляционного проектирования. Через разложение полнополсного сигнала на подполосы каждый субполосный сигнал содержит только 1/M из исходной полосы частот. Таким образом, субполосный сигнал может быть максимально прорежен на коэффициент M без потери информации. Коэффициент прореживания обозначается в качестве D. Процесс разложения опорного сигнала и сигнала ошибки может быть изображен следующим образом:
 (8)
(8)
 (9)
(9)
где xm(k) и em(k) являются опорным сигналом и сигналом ошибки соответственно в m-ой подполосе, m = 0, 1, …, M - 1, сигнал ошибки после M-оценки обозначен в качестве ec = ψ{e(n)} и k является индексом блока, ik = (n - 1)/D. Для дополнительного уменьшения вычислительной сложности также в подполосах могут быть реализованы передаточные функции Ŝ(z) оцененного вторичного тракта. Как показано на Фигуре 1, полнополосная Ŝ(z) раскладывается в набор субполосных функций Ŝ0(z), Ŝ1(z), … , ŜM-1(z). Эти субполосные передаточные функции могут быть оценены посредством использования подходов идентификации через функционирующие без сети или через сеть в реальном времени системы, в которых генератор широкополосного шума может быть разложен на соответствующие подполосы. Каждая импульсная характеристика ŝm субполосного вторичного тракта Ŝm(z) содержит коэффициенты I/D, где I является порядком полнополосного FIR-фильтра (КИХ-фильтра) вторичного тракта. Следовательно, отфильтрованный опорный сигнал в каждой подполосе представляет собой:
 (10)
(10)
где * обозначает процесс свертки.
[0031] Затем, уравнение обновления весовых коэффициентов фильтра в m-ой подполосе представляет собой:
 (11)
(11)
что является содержащим комплексные значения процессом обновления. μm является размером шага сходимости в каждой подполосе, wm(k) = [wm,0(k), wm,1(k), … , wm,N/D(k)]T является вектором весовых коэффициентов субполосного фильтра длиною в N/D,  является вектором опорного сигнала m-ого субполосного фильтра, и
является вектором опорного сигнала m-ого субполосного фильтра, и  обозначает комплексно-сопряженное число. Размер μm шага может быть нормирован по отношению к мощности инверсного отфильтрованного опорного сигнала в соответствующей подполосе:
обозначает комплексно-сопряженное число. Размер μm шага может быть нормирован по отношению к мощности инверсного отфильтрованного опорного сигнала в соответствующей подполосе:
 (12)
(12)
где μ является нормированным размером шага, а ε является малой постоянной величиной для избегания бесконечного размера шага. Затем, вектор wm и вектор  отфильтрованного опорного сигнала могут укомплектовываться в длинный вектор в каждой подполосе.
отфильтрованного опорного сигнала могут укомплектовываться в длинный вектор в каждой подполосе.
[0032] Следующий этап состоит в преобразовании набора весовых коэффициентов субполосного фильтра в эквивалентный полнополосный набор. В общедоступной литературе предложено несколько методик преобразования весовых коэффициентов (например, комплектование FFT, комплектование FFT-2, преобразование DFT-FIR весовых коэффициентов и линейное преобразование весовых коэффициентов). В данном документе внедрен способ комплектования FFT (БПФ). Весовые коэффициенты wm субполосного фильтра преобразовываются в частотную область посредством N/D-точечного БПВ:
 (13)
(13)
Затем эти коэффициенты Wm в частотной области в каждом субполосном фильтре m = 0, 2, …, M - 1 должным образом комплектуются для образования массива из N элементов:
 (14)
(14)
где W является коэффициентом в частотной области полнополосного фильтра. Правило комплектования FFT заключается в следующем:
где с W(l) является l-ым коэффициентом в частотной области полнополосного фильтра,  обозначает округление lM/N до ближайшего целого числа, а (l)2N/M обозначает l по модулю 2N/M. После укомплектования полнополосных весовых коэффициентов из каждой подполосы согласно вышеупомянутому правилу комплектования коэффициент во временной области полнополосного адаптивного фильтра W(z) получается посредством взятия IFFT (обратного быстрого преобразования Фурье) над W:
обозначает округление lM/N до ближайшего целого числа, а (l)2N/M обозначает l по модулю 2N/M. После укомплектования полнополосных весовых коэффициентов из каждой подполосы согласно вышеупомянутому правилу комплектования коэффициент во временной области полнополосного адаптивного фильтра W(z) получается посредством взятия IFFT (обратного быстрого преобразования Фурье) над W:
 (15)
(15)
где w(n)= [w0, w1, … , wN-1]T. Затем выходной сигнал из полнополосного адаптивного фильтра может быть сгенерирован посредством Уравнения (1a).
Оценка параметров пороговой величины
Реализуемый через сеть в реальном времени способ
[0033] Для функции Выровненной M-оценки параметр c пороговой величины может быть определен посредством реализуемых через сеть в реальном времени или реализуемых без подключения к сети подходов оценивания. Как уже обсуждалось в данной области техники, параметр c может быть вычислен в качестве 1, 1,5, 2 и 3 кратного среднего абсолютного значение сигнала ошибки. Было обнаружено, что контрольная производительность не чувствительна к значению c, и было предложено, чтобы подход идентификации через сеть в реальном времени использовал следующее:
 (16)
(16)
Для содержащей три части функции M-оценки Хампела три параметра пороговой величины ξ, Δ1 и Δ2 могут быть оценены посредством реализуемого через сеть в реальном времени способа, предлагаемого в доступной литературе, через оценку отклонения «безымпульсных» дискретных отсчетов. Формула устойчивой оценки отклонения  задана следующим образом:
задана следующим образом:
 (17a)
(17a)
 (17b)
(17b)
 (17c)
(17c)
где отрицательное воздействие импульса на оценку отклонения может быть гарантировано посредством вычисления срединного значения члена
 . λ является коэффициентом пренебрежения и удовлетворяет 0 < λ < 1, а Nw является длиной окна. Срединное значение может быть найдено с использованием алгоритма сортировки некоторой последовательности данных.
. λ является коэффициентом пренебрежения и удовлетворяет 0 < λ < 1, а Nw является длиной окна. Срединное значение может быть найдено с использованием алгоритма сортировки некоторой последовательности данных.
[0034] Для M-оценки Хьюбера, которая обеспечивает содержащие две части пороговые величины, параметры таких пороговых величин могут быть определены посредством реализуемой через сеть в реальном времени процентильной оценки. В данном документе применяется алгоритм диаграммы размаха (box-plot, BP), изображенный на Фигуре 3, который функционирует следующим образом для заданного вектора данных:
1) Нахождение первого и третьего квартилей (Q1 и Q3), в данном случае Q1 (25-ый процентиль) и Q3 (75-ый процентиль) представляют собой данные, которые больше 25% и 75% от всего вектора данных, соответственно
2) Задание интерквартильного диапазона как IQR = Q3 - Q1
3) Установление пороговых границ: c1 = Q1 - 1,5 × IQR, c2 = Q3 + 1,5 × IQR
4) Применение алгоритма BP к скользящему окну Nw данных, которые могут быть отсортированы посредством использования алгоритма сортировки «Пузырьком». Для каждых новых данных в момент n времени дискретного отсчета:
i) Если либо x(n) ≤ c1, либо x(n) ≥ c2, то скользящее окно данных не обновляется
ii) В противном случае, удаление самых старых данных из скользящего окна и вставка новых данных в правильное место, затем вычисление границ с использованием алгоритма BP
Реализуемый без подключения к сети способ
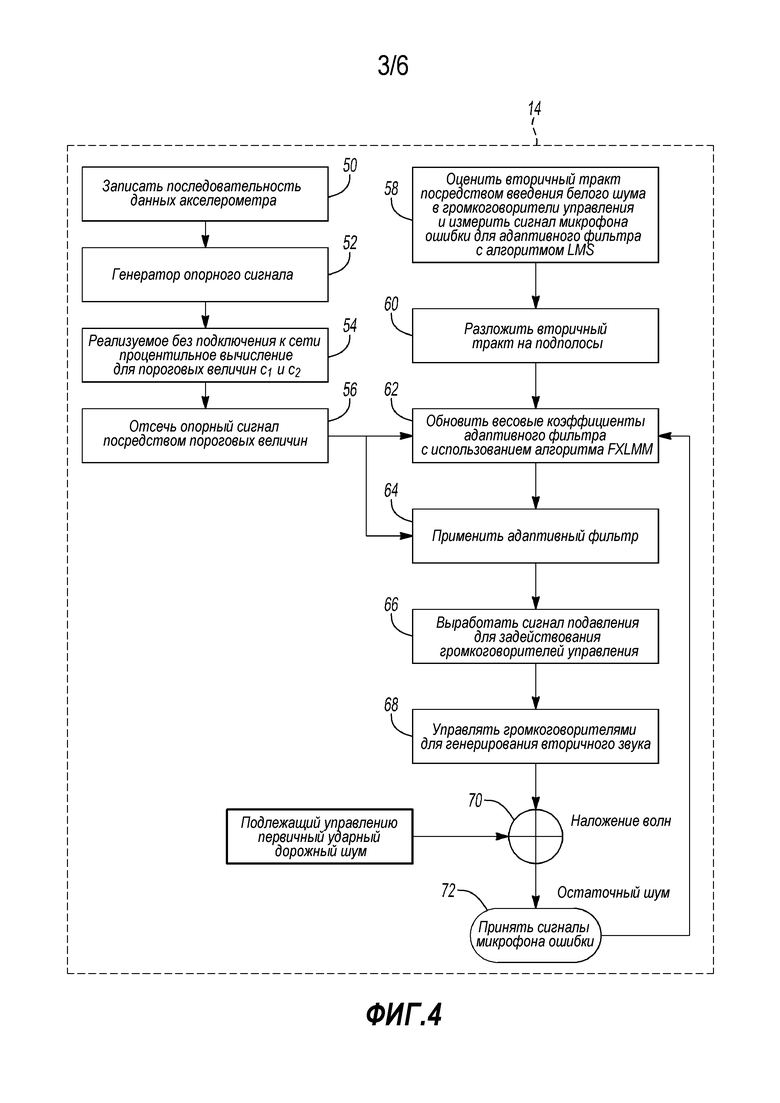
[0035] Параметры пороговой величины могут быть также определены через реализуемую без подключения к сети идентификацию посредством вычисления процентилей. Следовательно, необходимо произвести предварительное измерение опорного сигнала и сигнала ошибки. Например, в применениях для дорожного шума с целью статистического определения приблизительных пороговых величин при различных дорожных условиях необходимо систематическое измерение. На Фигуре 4 изображена блок-схема последовательности операций для системы ANC с пороговой величиной. На этапе 50 осуществляется запись последовательности данных акселерометра. На этапе 52 к данным акселерометра применяется генератор опорного сигнала. На этапе 54 для пороговых величин c1 и c2 выполняется реализуемое без подключения к сети процентильное вычисление. И на этапе 56 опорный сигнал отсекается пороговыми величинами. На этапе 58 вторичный тракт оценивается в блоке 40 c Фигуры 1 посредством введения белого шума через блок 36 генератора шума в громкоговоритель 48 и измерения отклика через микрофон 46. На этапе 60 оцененный вторичный тракт подвергается разложению на подполосы. На этапе 62 весовые коэффициенты адаптивного фильтра обновляются с использованием алгоритма FXLMM. На этапе 64 применяется адаптивный фильтр. Как видно на Фигуре 4, этапы 62, 64 используют отсеченный опорный сигнал в качестве входного сигнала. На этапе 66 вырабатывается сигнал подавления для задействования управления громкоговорителями. На этапе 68 осуществляется управление громкоговорителями для генерирования вторичного звука. На этапе 70 над подлежащим подавлению первичным ударным дорожным шумом и вторичным звуком выполняется наложение волн. На этапе 72, принимаются сигналы микрофона ошибки. Затем алгоритм возвращается на этап 62. Схожим образом может быть сформулирована реализуемая через сеть в реальном времени идентификация пороговой величины посредством замещения блока пороговой величины блок-схемы последовательности операций.
Численное моделирование
[0036] Было промоделировано функционирование системы управления и внутренние акустические отклики вследствие взаимодействия шин с дорогой с различными профилями дорожных неровностей. В этих моделированиях были рассмотрены различные внутренние акустические отклики вследствие дорожного профиля с многочисленными ударными толчками, которые были измерены из экспериментальных дорожных испытаний. Система ANC разработана для ослабления нормального и ударного дорожного шума вокруг положений головы водителя и пассажира. В потолок кабины транспортного средства над головами помещены микрофоны ошибки. Экспериментально с использованием подхода идентификации через функционирующую без подключения к сети систему была измерена оцененная передаточная функция вторичного тракта от громкоговорителя до звукового давления в микрофоне ошибки. На Фигуре 5 изображена используемая в данном моделировании функция частотной характеристики модели вторичного тракта. Модель вторичного тракта была сформулирована в качестве фильтра с конечной импульсной характеристикой (КИХ (finite impulse response, FIR)), и одна и та же модель вторичного тракта использовалась как в тракте опорного сигнала, так и после выхода контроллера. В первом случае измеренный дорожный шум (от нормальной дорожной поверхности без каких-либо переходов с буграми или выбоинами до ухабистых дорог с тремя ударами и затем к нормальной дорожной поверхности) используется для моделирования. Во втором случае для моделирования с целью оценки функционирования системы ANC с использованием различных алгоритмов управления берется объединенная дорожная поверхность, состоящая из десяти повторяющихся событий удара, за которыми следует нормальный дорожный шум.
[0037] На Фигуре 6 изображен результат моделирования во временной области для первого случая с нормальным дорожным шумом, засоренный тремя событиями удара. В данном случае параметры пороговой величины для предложенного субполосного алгоритма FXLMM были определены посредством реализуемого без подключения к сети процентильного вычисления. Верхний и нижний пределы в блоке пороговой величины выбраны в качестве 99,9 и 0,1 процентиля от всех данных. Размер шага сходимости для традиционного алгоритма FXLMS составляет μ = 5e - 4, а для субполосного алгоритма: μ = 1e - 3. На Фигуре 6 видно, что алгоритм FXLMS становится нестабильным после возникновения событий удара, и требуется много времени для схождения системы обратно к нормальному дорожному шуму после ударов. В то время как предложенный субполосный алгоритм повысил устойчивость при событиях удара. Это прежде всего происходит вследствие введения пороговой величины в процесс обновления весовых коэффициентов адаптивного фильтра. Традиционный алгоритм FXLMS не обладает такой устойчивостью, пока не будет уменьшен размер шага сходимости, при котором едва ли будут присутствовать какие-либо уменьшения в нормальном дорожном шуме (меньшей мощности требуется больший размер шага).
[0038] Более четкое сравнение изображено в спектральном результате на Фигуре 7. В данном случае это является результатом в частотной области управляемого отклика в пунктирном блоке на Фигуре 6. Предложенный субполосный алгоритм предоставляет большие уменьшения в более широком частотном диапазоне. Это является уникальным преимуществом субполосной обработки цветного шума, так как разброс собственных значений отфильтрованного опорного сигнала может быть выровнен. Выравнивание собственных значений может обеспечить лучший размер шага для каждой отдельной частоты. Однако традиционный алгоритм FXLMS склонен нацеливаться на спектр шума с наивысшей мощностью, так как размер шага оптимален только на той частоте.
[0039] На Фигурах 8-10 изображены дополнительные результаты моделирования для второго случая, в котором рассмотрен объединенный дорожный шум с десятью событиями удара, за которыми следует нормальный дорожный шум. Значения параметров для каждого алгоритма являются теми же самыми, которые используются в первом случае. На фигуре 8 видно, что традиционный алгоритм FXLMS демонстрирует значительную нестабильность после первых двух событий удара. С другой стороны, предложенный субполосный алгоритм начинает сходиться после нескольких последовательных событий удара. Кроме того, он проявляет большую стабильность после ударов и быстрее сходится для нормального дорожного шума. На Фигуре 9 изображен уровень звукового давления для субполосного алгоритма при событиях ударного дорожного шума до и после управления. После первых двух ударов присутствует уменьшение на несколько дБ до наблюдения некоторого усиления для события удара около 12 секунд. Результат управления в частотной области для нормального дорожного шума за последние 2 секунды изображен на Фигуре 10. Схожим образом субполосный алгоритм может генерировать общее уменьшение шума на 5 дБА в частотном диапазоне от 50 до 320 Гц.
Заключение
[0040] Выше были обсуждены системы ANC, сконфигурированные с усовершенствованными субполосными алгоритмами FXLMM (наименьшей средней M-оценки с x-фильтрацией) с пороговыми величинами на трактах опорного сигнала и сигнала ошибки для дорожного шума с ударами в кабине транспортного средства. Эти системы могут обеспечивать более устойчивое и сбалансированное функционирование для цветного дорожного шума по более широкому частотному диапазону. Субполосная обработка выравнивает разброс собственных значений отфильтрованного опорного сигнала, что преодолевает присущие традиционному алгоритму FXLMS ограничения. Следовательно, может быть получена быстрая сходимость, и оптимальное функционирование достигается по более широкому частотному диапазону. Кроме того, модифицированный алгоритм FXLMM с пороговыми величинами для импульсных дискретных отсчетов в опорном сигнале и сигнале ошибки проявляет тенденцию к совершенствованию устойчивости процесса обновления весовых коэффициентов адаптивного фильтра, который мог бы быть легко нарушен пиковыми данными.
[0041] Процессы, способы или алгоритмы, раскрытые в данном документе, могут быть доставляемыми в или реализованы устройством обработки, контроллером или компьютером, которые могут включать в себя любой существующий программируемый электронный блок управления или выделенный электронный блок управления. Схожим образом процессы, способы или алгоритмы могут быть сохранены в качестве данных и команд, исполняемых контроллером или компьютером во многих формах, включающих в себя, но не ограничивающихся этим, информацию, постоянно хранимую на неперезаписываемых носителях хранения информации, таких как ROM-устройства, и информацию, хранимую с возможностью изменения на перезаписываемых носителях хранения информации, таких как гибкие диски, магнитные ленты, CD, RAM-устройства и другие магнитные и оптические носители. Процессы, способы или алгоритмы могут также быть реализованы в исполняемом объекте программного обеспечения. Альтернативно, процессы, способы или алгоритмы могут быть воплощены полностью или частично с использованием подходящих компонентов аппаратного обеспечения, таких как специализированные интегральные схемы (Application Specific Integrated Circuits, ASIC), программируемые вентильные матрицы (Field Programmable Gate Array, FPGA), конечные автоматы, контроллеры или другие компоненты или устройства аппаратного обеспечения, либо сочетания компонентов аппаратного обеспечения, программного обеспечения и встроенного микропрограммного обеспечения.
[0042] Термины, используемые в данном описании, являются терминами используемыми для описания, а не для ограничения, и понятно, что без отступления от сущности и объема раскрытия могут быть произведены различные изменения. Как описано ранее, признаки различных вариантов осуществления могут быть объединены для образования дополнительных вариантов осуществления изобретения, которые могут не быть явно описаны или изображены. В то время как различные варианты осуществления могли быть описаны в качестве обеспечивающих преимущества или являющимися предпочтительными над другими вариантами осуществления или вариантами реализации предшествующего уровня техники в отношении одной или более желаемых характеристик, специалистам в уровне техники понятно, что от одного или более признаков или характеристик можно отказаться для достижения желаемых свойств всей системы, которые зависят от конкретного применения и реализации. Эти свойства могут включать в себя, но не ограничиваться этим, стоимость, прочность, длительность, затраты на срок эксплуатации, конкурентоспособность, внешний вид, упаковка, размер, ремонтопригодность, вес, технологичность, легкость сборки, и т.д. По существу, варианты осуществления, описанные в качестве менее желательных по сравнению с другими вариантами осуществления или вариантами реализации предшествующего уровня техники в отношении одной или более характеристик, не выходят за объем раскрытия и могут быть желательными для конкретных применений.
Изобретение относится к активному шумоподавлению. Система активного шумоподавления (ANC) в транспортном средстве включает в себя процессор, запрограммированный для реализации адаптивного субполосного алгоритма управления с фильтрацией опорного сигнала, который применяет пороговые величины к трактам сигнала обратной связи ошибки и опорного сигнала так, чтобы в ответ на широкополосные негауссовы импульсные опорные сигналы, указывающие дорожный шум и детектируемые датчиками, весовые коэффициенты задавали адаптивный фильтр схождения алгоритма управления и обеспечивали возможность системе ANC частично подавлять дорожный шум посредством громкоговорителя. Снижается уровень посторонних шумов. 3 н. и 17 з.п. ф-лы, 10 ил., 1 табл.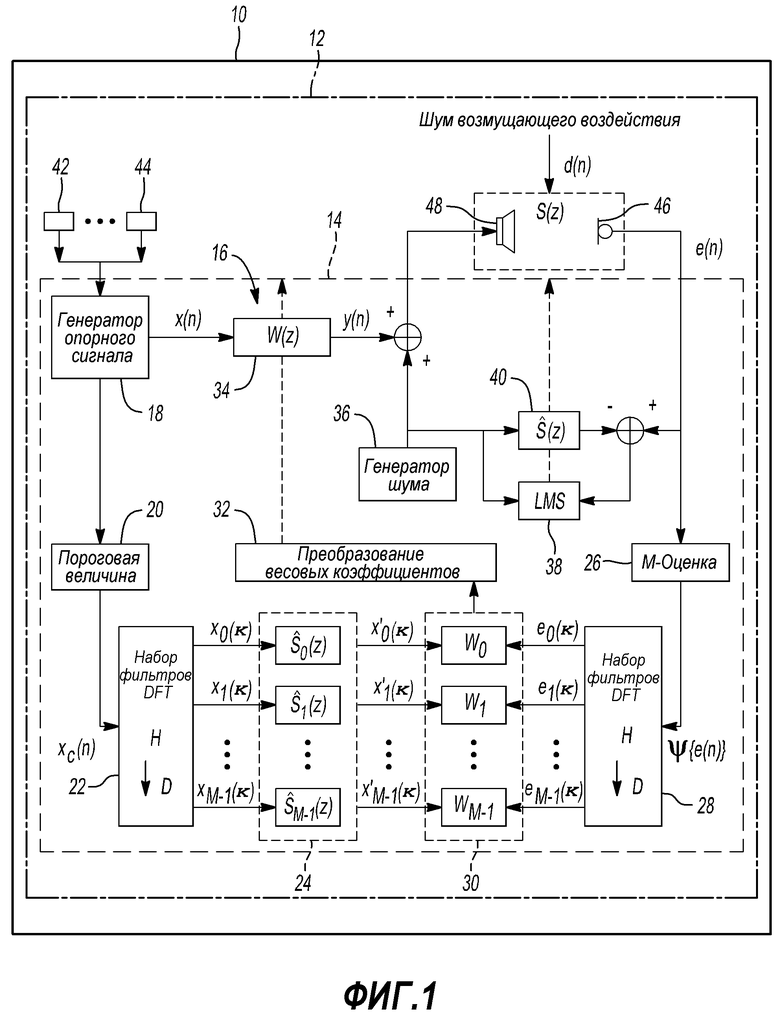
1. Система активного шумоподавления (ANC) в транспортном средстве, содержащая:
систему активного шумоподавления (ANC), включающую в себя процессор, запрограммированный для реализации адаптивного субполосного алгоритма управления с фильтрацией опорного сигнала, который применяет пороговые величины к трактам сигнала обратной связи ошибки и опорного сигнала так, чтобы в ответ на широкополосные негауссовы импульсные опорные сигналы, указывающие дорожный шум и детектируемые датчиками, весовые коэффициенты задавали адаптивный фильтр схождения алгоритма управления и обеспечивали возможность системе ANC частично подавлять дорожный шум посредством громкоговорителя.
2. Система по п.1, в которой значения пороговых величин основаны на отклонении амплитуд импульсных опорных сигналов.
3. Система по п.2, в которой упомянутые значения увеличиваются с увеличением отклонения.
4. Система по п.1, в которой значения пороговых величин основаны на процентильных характеристиках импульсных опорных сигналов.
5. Система по п.1, в которой адаптивный субполосный алгоритм управления с фильтрацией опорного сигнала является безынерционным.
6. Система по п.1, в которой адаптивный субполосный алгоритм управления с фильтрацией опорного сигнала является адаптивным субполосным алгоритмом управления с фильтрацией опорного сигнала по критерию наименьшего среднего квадрата с x-фильтрацией (FXLMS) или адаптивным субполосным алгоритмом управления с фильтрацией опорного сигнала по критерию наименьшей средней M-оценки с x-фильтрацией (FXLMM).
7. Система по п.1, в которой адаптивный субполосный алгоритм управления с фильтрацией опорного сигнала включает в себя набор фильтров дискретного преобразования Фурье (DFT).
8. Система по п.7, в которой набор фильтров DFT является набором фильтров DFT с равномерной шириной полосы или набором фильтров DFT с переменной шириной полосы.
9. Способ активного шумоподавления в транспортном средстве, содержащий этапы, на которых:
применяют посредством реализуемого процессорами адаптивного субполосного алгоритма управления с фильтрацией опорного сигнала первую пороговую величину к тракту опорного сигнала и вторую пороговую величину к тракту сигнала обратной связи ошибки так, чтобы в ответ на последовательность широкополосных негауссовых импульсных опорных сигналов, указывающих дорожный шум и детектируемых датчиками, весовые коэффициенты задавали адаптивный фильтр схождения алгоритма управления для обеспечения частичного подавления дорожного шума посредством вывода из громкоговорителя.
10. Способ по п.9, в котором значения пороговых величин основаны на отклонении амплитуд импульсных опорных сигналов.
11. Способ по п.10, в котором упомянутые значения увеличиваются с увеличением отклонения.
12. Способ по п.9, в котором значения пороговых величин основаны на процентильных характеристиках импульсных опорных сигналов.
13. Способ по п.9, в котором адаптивный субполосный алгоритм управления с фильтрацией опорного сигнала является безынерционным.
14. Способ по п.9, в котором адаптивный субполосный алгоритм управления с фильтрацией опорного сигнала является адаптивным субполосным алгоритмом управления с фильтрацией опорного сигнала по критерию наименьшего среднего квадрата с x-фильтрацией (FXLMS) или адаптивным субполосным алгоритмом управления с фильтрацией опорного сигнала по критерию наименьшей средней M-оценки с x-фильтрацией (FXLMM).
15. Способ по п.9, в котором адаптивный субполосный алгоритм управления с фильтрацией опорного сигнала включает в себя набор фильтров дискретного преобразования Фурье (DFT).
16. Способ по п.15, в котором набор фильтров DFT является набором фильтров DFT с равномерной шириной полосы или набором фильтров DFT с переменной шириной полосы.
17. Система активного шумоподавления (ANC) в транспортном средстве, содержащая:
акселерометры,
микрофон, и
громкоговоритель; и
один или более процессоров, запрограммированных с возможностью реализации адаптивного субполосного алгоритма управления с фильтрацией опорного сигнала, который применяет пороговые величины к трактам сигнала обратной связи ошибки и опорного сигнала так, чтобы в ответ на последовательность имеющих слышимый частотный диапазон от 20 Гц до 20 кГц широкополосных негауссовых импульсных опорных сигналов, детектируемых акселерометрами и микрофоном и указывающих дорожный шум в транспортном средстве, весовые коэффициенты задавали адаптивный фильтр схождения алгоритма управления и обеспечивали возможность системе ANC частично подавлять дорожный шум через вывод из громкоговорителя.
18. Система по п.17, в которой адаптивный субполосный алгоритм управления с фильтрацией опорного сигнала является безынерционным.
19. Система по п.17, в которой адаптивный субполосный алгоритм управления с фильтрацией опорного сигнала является адаптивным субполосным алгоритмом управления с фильтрацией опорного сигнала по критерию наименьшего среднего квадрата с x-фильтрацией (FXLMS) или адаптивным субполосным алгоритмом управления с фильтрацией опорного сигнала по критерию наименьшей средней M-оценки с x-фильтрацией (FXLMM).
20. Система по п.17, в которой адаптивный субполосный алгоритм управления с фильтрацией опорного сигнала включает в себя набор фильтров дискретного преобразования Фурье (DFT).
| US 5561598 A, 01.10.1996 | |||
| US 6744886 В1, 01.06.2004 | |||
| СИСТЕМА АКТИВНОГО ШУМОПОДАВЛЕНИЯ И ЕЕ ПРИМЕНЕНИЕ | 2006 |
|
RU2411592C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОДАВЛЕНИЯ УЗКОПОЛОСНЫХ ШУМОВ В ПАССАЖИРСКОМ САЛОНЕ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2504025C2 |

