Предлагаемые способ и система относятся к информационно-измерительной системе и могут быть использованы в радиолокационной технике для высокоточной оценки ледовой обстановки в районах морской добычи и транспортировки нефтегазовых ресурсов.
Известны способы и устройства обнаружения и определения параметров морских ледовых полей (авт. свид. СССР №№1.778.487, 1.818.608; патенты РФ №№2.082.095, 2.158.008, 2.170.442, 2.319.205, 2.349.513, 2.360.848, 2.435.136, 2.467.347, 2.500.031, 2.660.752; патенты США №№3.665.466, 4.697.254, 6.188.348; Простаков А.Л. Электронный ключ к океану. Л.: Судостроение, 1986, с. 15, 16, 24 и другие).
Из известных способов и систем наиболее близкими к предлагаемым являются «Способ обнаружения и высокоточного определения параметров морских ледовых полей и радиолокационная система для его реализации» (патент РФ №2.660.752, G01S13/95, 2017), которые и выбраны в качестве прототипов.
Известные технические решения обеспечивают определение местоположения приближающихся опасных объектов, таких как айсберги, обширные ледовые поля, торосы, льдины, используя фазовый метод пеленгации.
Однако фазовому методу пеленгации свойственно противоречие между требованиями к точности измерений и однозначности отсчета углов.
Действительно, согласно формуле

где d1 - расстояние между антеннами 11 и 12 (измерительная база);
λ - длина волны;
β - угол места опасного объекта,
фазовая система тем чувствительнее к изменению угла β, чем больше относительный размер измерительной базы  Но с ростом
Но с ростом уменьшается значение угловой координаты β, при котором разность фаз Δϕ1 превосходит значение 2π, т.е. наступает неоднозначность отсчетов угловой координаты. Исключить неоднозначность фазового метода пеленгации можно использованием двух измерительных баз. При этом меньшая база образует грубую, но однозначную шкалу отсчета угла β, а большая измерительная - точную, но не однозначную шкалу отсчета угловой координаты β. В предлагаемых технических решениях две измерительные базы формируются косвенным методом.
уменьшается значение угловой координаты β, при котором разность фаз Δϕ1 превосходит значение 2π, т.е. наступает неоднозначность отсчетов угловой координаты. Исключить неоднозначность фазового метода пеленгации можно использованием двух измерительных баз. При этом меньшая база образует грубую, но однозначную шкалу отсчета угла β, а большая измерительная - точную, но не однозначную шкалу отсчета угловой координаты β. В предлагаемых технических решениях две измерительные базы формируются косвенным методом.
Технической задачей изобретения является разрешение противоречия между требованиями к точности измерения и однозначности отсчета угловой координаты β путем формирования двух измерительных баз косвенным методом.
Поставленная задача решается тем, что способ обнаружения и высоко точного определения параметров морских ледовых полей, включающий, в соответствии с ближайшим аналогом, действия на дистанции по обнаружению изменений параметров отраженных сигналов двумя интерферометрическими антеннами, создание мониторинга изменений, построение карт изменений, анализ изменений, при этом радиоизлучение производят с одной из двух разнесенных по высоте антенн, отраженные сигналы принимают двумя антеннами, временные отчеты отраженных сигналов разбивают на секции и для сжатия фазоманипулированных отраженных сигналов производят линейные свертки между отсчетами секций и отсчетами опорных функций, определяющих доплеровское смещение принимаемых сигналов посекционно для эхо-сигналов интерферометрических антенн, накопления результатов сжатия и по ним обнаружения кромки ледового поля, его фрагментов, оценки скорости дрейфа и разности фаз отраженных сигналов, приходящих на две интерферометрические антенны, при этом устанавливают в азимутальной плоскости вторую приемную антенну с возможностью ее вращения с угловой скоростью Ω по окружности ' вокруг приемопередающей антенны, формируют вторую измерительную базу d2 между приемопередающей и второй приемной антеннами в азимутальной плоскости и третью измерительную базу d3 между первой и второй приемными антеннами в гипотенузной плоскости, перемножают отраженные сигналы на промежуточной частоте fпр, принятые приемопередающей и первой приемной антеннами, выделяют низкочастотное напряжение, измеряют разность фаз между отраженными сигналами и определяют угол места β опасного объекта, перемножают отраженные сигналы, принятые передающей антенной и второй приемной антеннами, первой и второй приемными антеннами, выделяют низкочастотные напряжения с частотой Ω, сравнивают их по фазе с опорным напряжением с частотой Ω и определяют азимут и угол ориентации опасного объекта, по значению трех углов α, β и γ определяют местоположение опасных объектов, отличается от ближайшего аналога тем, что устанавливают в угломестной плоскости третью приемную антенну, формируют четвертую измерительную базу d4 в угломестной плоскости, перемножают отраженные сигналы на промежуточной частоте ƒпр, выделяют низкочастотные напряжения, измеряют разности фаз:


где d1, d4 - измерительные базы;
λ - длина волны;
β - угол места опасного объекта,
определяют сумму разности фаз
ΔϕΣ=Δϕ1+Δϕ2,
эквивалентную измерению фазового сдвига на измерительной базе, длину которой определяют суммой измерительных баз:
d5=d1+d1,
формируют точную, но не однозначную шкалу отсчета угла места β опасного объекта, определяют разность разностей фаз
эквивалентную измерению фазового сдвига на измерительной базе, длину которой определяют разностю измерительных баз:
d6=d1-d4,
формируют грубую, но однозначную шкалу отсчета угла места β опасного объекта, между сформированными косвенным методом измерительными базами устанавливают следующее неравенство:
Поставленная задача решается тем, что радиолокационная система обнаружения и высокоточного определения параметров морских ледовых полей, содержащая, в соответствии с ближайшим аналогом, последовательно включенные блок управления РЛС, синтезатор частот, генератор М-кода, первый модулятор, второй вход которого соединен с вторым выходом синтезатора частот, первый усилитель мощности, СВЧ коммутатор, второй вход которого соединен с вторым выходом блока управления РЛС, блок управления антенной системой, второй вход которого связан с блоком управления РЛС, третий вход - связан с приемопередающей антенной, а четвертый вход соединен с первой приемной антенной, первый усилитель высокой частоты, первый смеситель, второй вход которого соединен с третьим выходом синтезатора частот, первый усилитель промежуточной частоты, второй вход которого через устройство временной автоматической регулировки усиления соединен с третьим выходом блока управления РЛС, коммутатор промежуточной частоты, усилитель промежуточной частоты, второй вход которого через блок автоматической и ручной регулировки усиления соединен с его выходом и с пятым выходом блока управления РЛС, первый блок фазовых детекторов, второй вход которого через фазовращатель соединен с шестым выходом синтезатора частот, первый блок аналого-цифровых преобразователей квадратурных сигналов в цифровую форму, второй вход которого соединен с шестым выходом синтезатора частот, двухпортовое буферное оперативное запоминающее устройство, второй вход которого соединен с седьмым выходом блока управления РЛС, и цифровой измеритель, второй вход которого соединен с шестым выходом синтезатора частот, третий вход соединен с выходом блока управления антенной системы, а выход является выходом блока первичной цифровой обработки, последовательно подключенные к второму выходу генератора М-кода второго модулятора, второй вход которого соединен с третьим выходом синтезатора частот, и второй усилитель мощности, выход которого соединен с третьим входом СВЧ коммутатора, последовательно подключенные к третьему выходу блока управления антенной системы второго усилителя высокой частоты, второго смесителя, второй вход которого соединен с пятым выходом синтезатора частот, и второй усилитель промежуточной частоты, второй вход которого соединен с вторым выходом устройства временной автоматической регулировки усиления, а выход подключен к третьему входу коммутатора промежуточной частоты, последовательно подключенные к выходу усилителя промежуточной частоты второй блок фазовых детекторов, второй вход которого соединен с шестым выходом синтезатора частот, и второй блок аналого-цифровых преобразователей квадратурных сигналов в цифровую форму, второй вход которого соединен с седьмым выходом синтезатора частот, а выход подключен к третьему входу двухпортового буферного оперативного запоминающего устройства, последовательно подключенные к четвертому выходу блока управления антенной системой третий усилитель высокой частоты, третий смеситель, второй вход которого соединен с восьмым выходом синтезатора частоты, и третий усилитель промежуточной частоты, второй вход которого соединен с третьим выходом устройства временной автоматической регулировки усиления, а выход подключен к четвертому входу коммутатора промежуточной частоты, к выходу первого усилителя промежуточной частоты последовательно подключены первый перемножитель, второй вход которого соединен с выходом второго усилителя промежуточной частоты, и первый узкополосный фильтр, к выходу первого усилителя промежуточной частоты последовательно подключены второй перемножитель, второй вход которого соединен с выходом третьего усилителя промежуточной частоты, второй узкополосный фильтр и первый дополнительный фазовый детектор, второй вход которого через опорный генератор соединен с пятым выходом блока управления РЛС, а выход подключен к шестому входу цифрового измерителя, к выходу второго усилителя промежуточной частоты последовательно подключены третий перемножитель, второй вход которого соединен с выходом третьего усилителя промежуточной частоты, третий узкополосный фильтр и второй дополнительный фазовый детектор, второй вход которого соединен с выходом опорного генератора, а выход подключен к седьмому входу цифрового измерителя, приемопередающей антенной, первой и второй приемными антеннами образованы три измерительные базы, расположенные в виде прямоугольного треугольника, в вершине которого расположена приемопередающая антенна с возможностью вращения с частотой Ω. вокруг вертикального катета, отличается от ближайшего аналога тем, что она снабжена третьей приемной антенной, четвертым усилителем высокой частоты, четвертым смесителем, четвертым усилителем промежуточной частоты, четвертым перемножителем, четвертым узкополосным фильтром, двумя фазометрами, сумматором и вычитателем, причем третья приемная антенна расположена на вертикальном катете и подключена к шестому входу блока управления антенной системой, к пятому выходу блока управления антенной системой последовательно подключены четвертый усилитель высокой частоты, четвертый смеситель, второй вход которого соединен с десятым выходом синтезатора частот, и четвертый усилитель промежуточной частоты, второй вход которого соединен с четвертым выходом устройства временной автоматической регулировки усиления, а выход подключен к пятому входу коммутатора промежуточной частоты, к выходу первого узкополосного фильтра подключен первый фазометр, к выходу первого усилителя промежуточной частоты последовательно подключены четвертый перемножитель, второй вход которого соединен с выходом четвертого усилителя промежуточной частоты, четвертый узкополосный фильтр и второй фазометр, выходы первого и второго фазометров через сумматор и вычитатель подключены к седьмому и восьмому входам цифрового измерителя соответственно, которые также связаны с процессором БПФ.
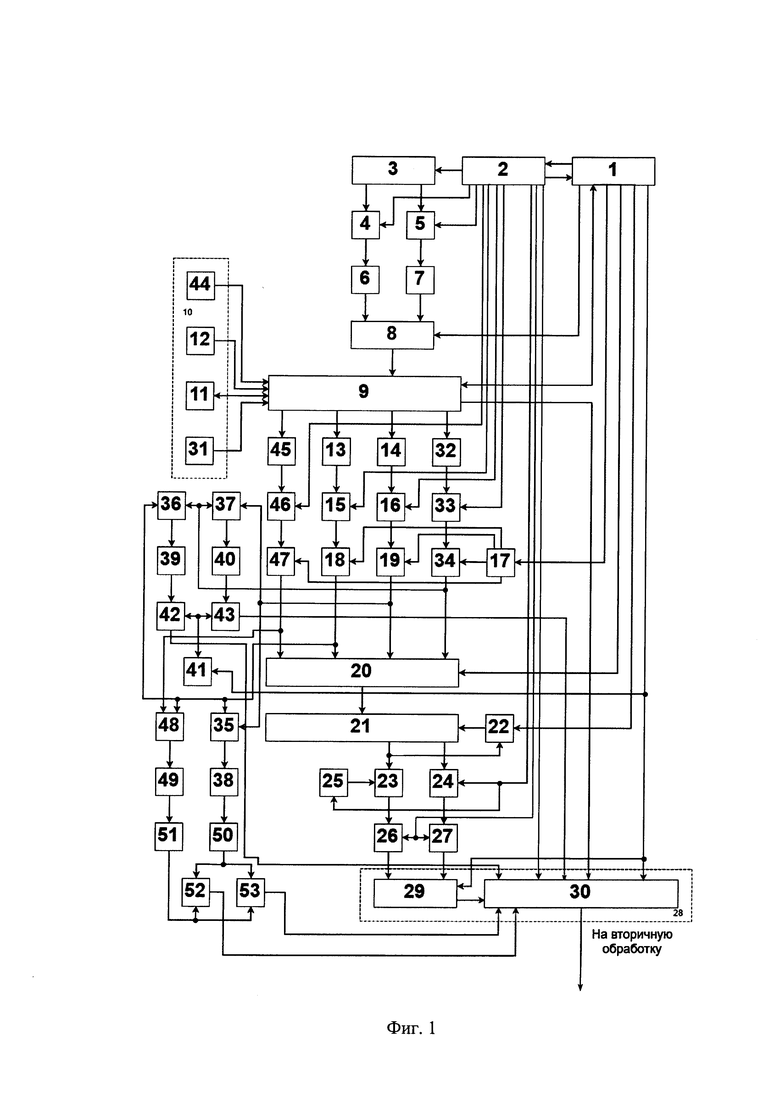
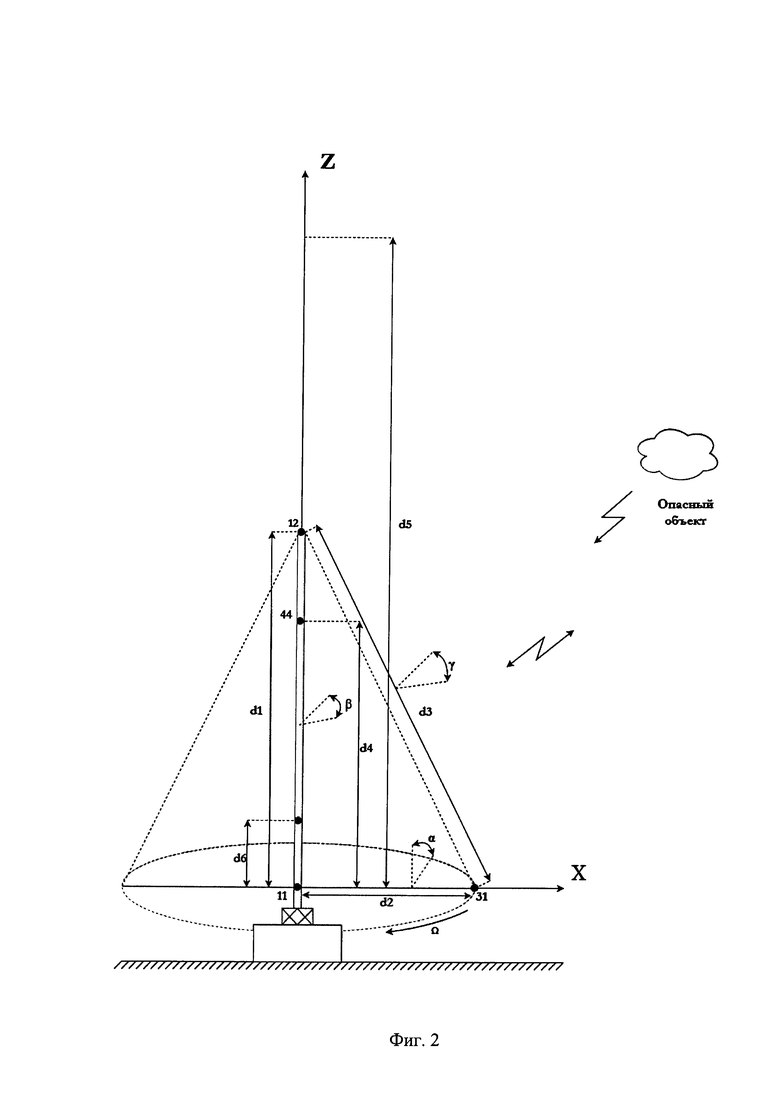
Структурная схема радиолокационной станции, реализующей предлагаемый способ, представлена на фиг. 1. Взаимное расположение приемных антенн показано на фиг. 2.
Радиолокационная станция содержит последовательно включенные блок 1 управления РЛС, синтезатор 2 частот, генератор 3 М-кода, первый модулятор 4, второй вход которого соединен с вторым выходом синтезатора 2 частот, первый усилитель 6 мощности, СВЧ коммутатор 8, второй вход которого соединен с вторым выходом блока 1 управления РЛС, блок 9 управления антенной системой, второй вход которого связан с блоком 1 управления РЛС, третий вход связан с приемопередающей антенной 11, четвертый вход соединен с выходом первой приемной антенны 12, пятый вход соединен с выходом второй приемной антенны 31, первый усилитель 13 высокой частоты, первый смеситель 15, второй вход которого соединен с четвертым выходом синтезатора 2 частот, первый усилитель 18 промежуточной частоты, второй вход которого через устройство 17 временной автоматической регулировки усилителя соединен с третьим выходом блока 1 управления РЛС, коммутатор 20 промежуточной частоты, усилитель 21 промежуточной частоты, второй вход которого через блок 22 автоматической и ручной регулировки усиления соединен с третьим выходом блока 1 управления РЛС, первый блок 23 фазовых детекторов, второй вход которого через фазовращатель 25 соединен с пятым выходом синтезатором 2 частот, первый блок 26 аналого-цифровых преобразователей квадратурных сигналов в цифровую форму, второй вход которого соединен с четвертым выходом блока 1 управления РЛС, двухпортовое буферное оперативное запоминающее устройство 29, второй вход которого соединен с седьмым выходом блока 1 управления РЛС, и цифровой измеритель 30, выход которого является выходом блока 28 первичной цифровой обработки. К второму выходу генератора 3 М-кода последовательно подключены второй модулятор 5, второй вход которого соединен с третьим выходом синтезатора 2 частот, и второй усилитель 7 мощности, выход которого соединен с третьим входом СВЧ коммутатора 8. К третьему выходу блока 9 управления антенной системой последовательно подключены второй усилитель 14 высокой частоты, второй смеситель 16, второй вход которого соединен с пятым выходом синтезатора 2 частот, второй усилитель 19 промежуточной частоты, второй вход которого соединен с вторым выходом устройства 17 временной автоматической регулировки усиления, а выход подключен третьему входу коммутатора 20 промежуточной частоты. К четвертому выходу блока 9 управления антенной системой последовательно подключены третий усилитель 32 высокой частоты, третий смеситель 33, второй вход которого соединен с шестым выходом синтезатора 2 частот, третий усилитель 34 промежуточной частоты, второй вход которого соединен с третьим выходом устройства 17 временной автоматической регулировки усиления, а выход подключен к четвертому входу коммутатора 20 промежуточной частоты. К выходу усилителя 21 промежуточной частоты последовательно подключены второй блок 24 фазовых детекторов, второй вход которого соединен с пятым выходом синтезатором 2 частоты и второй блок 27 аналого-цифровых преобразователей квадратурных сигналов в цифровую форму, второй вход которого соединен с шестым выходом синтезатора 2 частот, а выход подключен к второму входу двухпортовного буферного оперативного запоминающего устройства 29. К выходу первого усилителя 18 промежуточной частоты последовательно подключены первый перемножитель 35, второй вход которого соединен с выходом второго усилителя 19 промежуточной частоты, и первый узкополосный фильтр 38. К выходу первого усилителя 18 последовательно подключены второй перемножитель 36, второй вход которого соединен с выходом третьего усилителя 34 промежуточной частоты, второй узкополосный фильтр 39 и первый дополнительный фазовый детектор 42, второй вход которого соединен с выходом опорного генератора 41, а выход подключен к шестому входу цифрового измерителя 30. К выходу второго усилителя 19 промежуточной частоты последовательно подключены третий перемножитель 37, второй вход которого соединен с выходом третьего усилителя 34 промежуточной частоты, третий узкополосный фильтр 40 и второй дополнительный фазовый детектор 43, второй вход которого соединен с выходом опорного генератора 41, а выход подключен к седьмому входу цифрового измерителя 30.
К пятому выходу блока 9 управления антенной системой последовательно подключены четвертый усилитель 45 высокой частоты, четвертый смеситель 46, второй вход которого соединен с седьмым выходом синтезатора 2 частоты, и четвертый усилитель 47 промежуточной частоты, второй вход которого соединен с четвертым выходом устройства 17 временной автоматической регулировки усилителя, а выход подключен к пятому входу коммутатора 20 промежуточной частоты.
К выходу первого усилителя 18 промежуточной частоты последовательно подключены четвертый перемножитель 48, второй вход которого соединен с выходом четвертого усилителя 47 промежуточной частоты, четвертый узкополосный фильтр 49 и второй фазометр 51. Выходы первого 50 и второго 51 фазометров через сумматор 52 и вычитатель 53 подключены к седьмому и восьмому входам цифрового измерителя 30, которые также связаны с процессором БПФ.
Предлагаемый способ заключается в следующем.
В способе обнаружения и высокоточного определения параметров морских ледовых полей производят действия по обнаружению изменений радиоизлучений тремя интерферометрическими антеннами на дистанции. Радиоизлучения производят приемопередающей антенной, а отраженные сигналы принимают тремя антеннами. Отраженные сигналы разбиваются на секции. Производятся действия по обработке сигналов. Причем производятся вычисления каждой свертки посекционно. После чего спектр каждой секции перемножается почленно со спектром опорной функции. По окончании этого процесса над результатом перемножения проводится операция комплексного сопряжения. А над полученным выражением далее проводится операция преобразования функций посредством ОБПФ - обратного быстрого преобразования Фурье и затем повторно берется комплексное сопряжение от результата операции преобразования функций (ОБПФ). Для обнаружения кромки ледового поля, его фрагментов, оценки скорости дрейфа, направления дрейфа, торосистости ледовой поверхности осуществляется наполнение результатов сжатия, после чего производят сжатие эхо-сигналов интерферометрических антенн. При этом обеспечивается создание мониторинга измерений. По завершению процесса при необходимости производят построение карт изменений.
Существует множество способов ускорения вычисления БПФ. В нашем случае выбрана простая и весьма эффективная вычислительная структура «пинг/понг» с постоянными параметрами. Как правило, подобные устройства проектируются на основе ПЛИС - программируемых логических интегральных схем, что позволяет достигать высокой производительности, так как все операции решаются аппаратным путем, а не программным. Кроме того, им свойственна высокая степень адаптивности. Отсчеты сжатых ФМн сигналов квадратурно накапливаются и объединяются для решения задачи обнаружения кромки ледового поля. Одновременно когерентно накопленные отсчеты сжатых ФМн сигналов используются для анализа доплеровского спектра в каждом элементе дальности (после срабатывания обнаружителя), позволяющего оценить скорость дрейфа ледового поля.
Работа РЛС контроля ледовой обстановки может быть описана следующим образом.
Блок 1 управления РЛС формирует все служебные команды, выбор адресов в ОЗУ при записи и считывании, необходимые сигналы управления. Синтезатор 2 частот формирует гармонические сигналы двух диапазонов f1=9,372 ГГц (λ=3,2 см) и f2=34,88 ГГц (λ=8,6 мм), тактовые импульсы FT для регистра сдвига генератора М-кода, гетеродинные частоты fr1 и fr2 для преобразования по частот принимаемых сигналов, сигнал опорной частоты для первого 23 и второго 24 блоков фазовых детекторов. Генератор 3 М-кода предназначен для формирования М-псевдослучайной последовательности из 1023 дискретов, СВЧ коммутатор 8 переключает сигналы обоих диапазонов 8,6 мм и 3,2 см по команде.от блока 1 управления РЛС. При этом в качестве основного рабочего режима РЛС принят диапазон на длине волны 8,6 мм. Переключение режима работы РЛС на частотный диапазон 3,2 см используется в основном в случае плохих погодных условий, вызывающих сильные потери в мм диапазоне или распространении сигнала на трассе. Блок 9 управления антенной системой предназначен для коммутации режимов излучения иследующее неравенство: приема сигналов. Блок 10 антенной системы состоит из четырех антенн: 11, 12, 31 и 44. Причем антенна 11 используется как передающая и приемная для частот обоих диапазонов (отличие только в конструкции облучателя), а антенна 12, 31 и 44 используются только как приемные антенны при работе РЛС в радиоинтерферометрическом режиме. Антенны 11, 12, 31 и 44 вращаются на опоре основания 32.
Отраженные от опасных приближающихся объектов (айсберга, торосы и т.п.) сложные Фмн сигналы принимаются антеннами 11, 12, 31 и 44 соответственно:
u1 (t)=U1⋅Cos [2π(f1±Δf)t+ϕk(t)+ϕ1],
u2(t)=U2⋅Cos [2π(f2±Δf)t+ϕk(t)+ϕ2],

u4(t)=U4⋅Cos [2π(f4±Δf)t+ϕk(t)+ϕ4], 0≤t≤Т1
где U1, U2, U3, U4; f1 f2, f3, f4, ϕ1 ϕ2, ϕ3, ϕ4, T1 - амплитуды, несущие частоты, начальные фазы и длительность сигналов;
±Δf - нестабильность несущей частоты сигналов, обусловленная различными дестабилизирующими факторами, в том числе и эффектом Доплера:
ϕk(t)={0,π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующимкодом M(t),
причем ϕk(t)=coust при kτЭ<t<(k+1) τЭ и может изменяться скачком при t=kτэ, т.е. на границах между элементарными посылками (k=l, 2, …, N-1);
τЭ, N - длительность и количество элементарных посылок, из которых составлен сигнал длительностью T1 (T1=N⋅τЭ);
d2 ~ радиус окружности, по которой вращается антенна 31 (измерительная база) (фиг 2.);
Ω - скорость вращения антенны 31 вокруг антенны 11;
α - пеленг (азимут) на опасный приближающий объект.
Указанные сигналы поступают на первые входы смесителей 15, 16, 33 и 46, на вторые входы которых из синтезатора 2 частот подаются напряжения генераторов (гетеродинов):
uг1(t)=Uг1⋅Cos (2πfг1t+ϕг1),
uг2(t)=Uг2⋅Cos (2πfг2t+ϕг2),
uг3(t)=Uг3⋅Cos (2πfг3t+ϕг3),
uг4(t)=Uг4⋅Cos (2πfг4t+ϕг4),
На выходах смесителей 15, 16, 33 и 46 образуются напряжения комбинационных частот. Усилителями 18, 19, 34 и 47 выделяются напряжения промежуточной частоты соответственно:
uпp1(t)=Uпр1⋅Cos [2π(fnp±Δf)t+ϕk(t)+ϕпр1],
uпp2(t)=Uпр2⋅Cos [2π(fnp±Δf)t+ϕk(t)+ϕпр2],

uпp5(t)=Uпр5⋅Cos [2π(fпp±Δf)t+ϕk(t)+ϕпр5] 0≤t≤T1
где 
fпр=f1 - fг1 = f3 - fr2 = f3 - fг3 = f4 - fг4 - промежуточная частота;
ϕпр1=ϕ1 - ϕг1; ϕпр2=ϕ2 - ϕг2; ϕпр3=ϕ3 - ϕг3; ϕпр4=ϕ4 - ϕг4;
Напряжения unp1(t) и unp2(t), unp3(t) и unp5(t) поступают на два входа первого 35 и четвертого 48 перемножителей соответственно, на выходе которых образуются гармонические напряжения:
u4(β)=U4⋅Cos Δϕ1,
u9(β)=U9⋅Cos Δϕ2,


β - угол места опасного объекта
λ - длина волны;
d1, d4 - измерительные базы,
которое выделяется узкополосными фильтрами 38 и 49 соответственно и поступают на входы первого 50 и второго 51 фазометров. Последними измеряются фазовые сдвиги Δϕ1 и Δϕ2 соответственно.
На выходе сумматора 52 образуется сумма разностей фазы:
ΔϕΣ=Δϕ1+Δϕ2,
эквивалентная измерению фазового сдвига на измерительной фазе, длина которой определяется
суммой измерительных баз:
d5=d1+d4,
которая поступает на пятый вход цифрового измерителя 30.
На выходе вычитателя 53 образуется разность разности фаз:
Δϕр=Δϕ1-Δϕ2,
эквивалентная измерению фазового сдвига на измерительной базе, длина которой определяется разностью измерительных баз:
d6=d1-d4,
которая поступает на восьмой вход цифрового измерителя 30.
Напряжение uпp1(t) и uпp3(t) поступают на два входа второго перемножителя 36, на выходе которого образуется гармоническое напряжение
u5(t)=U5⋅Cos (Ωt-α),
где 
которое выделяется узкополосным фильтром 39 и поступает на первый вход первого дополнительного фазового детектора 42, на второй вход которого подается опорное напряжение опорного генератора 41
u0(t)=U0⋅Cos Ωt
На выходе фазового детектора 42 образуется низкочастотное напряжение
u6(α)=U6⋅Cos α,
где 

d2 _ измерительная база,
которое поступает на шестой вход цифрового измерителя 30.
Напряжения uпp2(t) и

поступают на два входа третьего перемножителя 37, на выходе которого образуется гармоническое напряжение
U7(t)=U7⋅Cos(Ωt-γ),
Это напряжение выделяется узкополосным фильтром 40 и поступает на первый вход второго дополнительного фазового детектора 43, на второй вход которого подается опорное напряжение u0(t) с выхода опорного генератора 41.
На выходе фазового детектора 43 образуется низкочастотное напряжение
U8(γ)=U8⋅Cos γ,
где 
 угол стабилизации опасного объекта,
угол стабилизации опасного объекта,
которое поступает на седьмой вход цифрового измерителя 30.
Для осуществления замеров толщины ледовой кромки, шероховатости льда, т.е. его торосов, подключается к работе миллиметровый диапазон антенны 11 и замеры этих показателей осуществляются при помощи двух антенн 11 и 12, т.е. в сантиметровом режиме обнаруживает кромку льда, а в миллиметровом не только обнаруживает, но и замеряет шероховатость льда, толщину ледовой кромки. При поступлении сигнала он усиливается усилителями 13 и 14 высокой частоты, преобразуется по частоте смесителями 15 и 16, усиливается усилителями 18 и 19 промежуточной частоты и поступает на коммутатор 20, который переключает каналы 8,6 мм и 3,2 см. Первый блок 26 и второй блок 27 аналого-цифровых преобразователей преобразовывают квадратурные сигналы в цифровую форму, которые поступают в двухпортовое буферное оперативное запоминающее устройство 29. В радиоинтерферометрическом режиме работы РЛС на частоте f2=34,88 ГГц (λ=8,6 мм) от антенн 11 и 12 по СВЧ и ПЧ трактам, по фазовому детектированию и оцифровке в АЦП используют идентичные параллельные приемные каналы. Запись и считывание отсчетов в двухпортовом буферном оперативном запоминающем устройстве (БОЗУ) 29 происходит одновременно, но с разными темпами и по разным адресам.
Блок 28 первичной цифровой обработки состоит из двухпортового БОЗУ 29 и цифрового измерителя 30. Двухпортовое буферное оперативное запоминающее устройство 29 включает в себя процессор сжатия ФМн сигналов и обнаружитель. Цифровой измеритель 30 состоит из счетчика дальности, процессора БПФ, цифрового коррелятора интерферометра и соответственно цифрового измерителя.
Все используемые блоки являются известными, либо могут быть получены из известных устройств путем их объединения известными методами.
Предлагаемые технические решения позволяют обеспечить бесконтактное измерение толщины опасных ледовых образований с толщиной льда более 50 см с высокой точностью, определить в заданном радиусе кромки льда. Кроме того, может быть определена скорость движения дрейфующих полей и крупногабаритного льда по направлению к морским добывающим платформам.
Предлагаемые технические решения обеспечивают определение местоположения приближающихся опасных объектов, таких как айсберг, обширные ледовые поля, торосы, крупные льдины и оценку их опасности для морских добывающих платформ. Это достигается за счет использования второй и третьей измерительных баз, расположенных в азимутальной и гипотенузной плоскостях, антенны которых размещены в виде прямоугольного треугольника, в вершине которого помещена приемопередающая антенна.
Предлагаемые технические решения инвариантны к виду модуляции (манипуляции) и нестабильности несущей частоты принимаемых сложных ФМн, что также обеспечивает повышение точности определения местоположения приближающихся опасных объектов.
Таким образом, предлагаемые технические решения по сравнению прототипами и другими техническими решениями аналогичного назначения обеспечивают разрешение противоречия между требованиями к точности измерения и однозначности отсчета угловой координаты β опасного объекта. Это достигается формированием двух измерительных баз косвенным методом.
При этом большая измерительная база формируется из суммы измерительных баз
d5=d1+d4
и обеспечивает точную, но не однозначную шкалу отсчета угла места β опасного объекта, а меньшая измерительная база формируется из разности измерительных баз
d6=d1-d4
и обеспечивает грубую, но однозначную шкалу отсчета угла места β опасного объекта. Причем между сформированными измерительными базами устанавливается следующие неравенства
Следует отметить, что вертикальный катет можно на практике реализовывать вертикальной мачтой, которую брать слишком высокой иногда невозможно из-за конструктивных особенностях.
В предлагаемых технических решениях указанная сложность разрешается косвенным методом, используя сумму разности фаз.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обнаружения и высокоточного определения параметров морских ледовых полей и радиолокационная система для его реализации | 2017 |
|
RU2660752C1 |
| Способ обнаружения и высокоточного определения параметров морских ледовых полей и радиолокационная система для его реализации | 2019 |
|
RU2723437C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА УТЕЧКИ ЖИДКОСТИ ИЛИ ГАЗА ИЗ ТРУБОПРОВОДА, НАХОДЯЩЕГОСЯ В ГРУНТЕ, И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2411476C1 |
| ВЕРТОЛЕТНЫЙ РАДИОЭЛЕКТРОННЫЙ КОМПЛЕКС | 2009 |
|
RU2419814C1 |
| МНОГОКАНАЛЬНЫЙ ЦИФРОВОЙ ПРИЕМНЫЙ МОДУЛЬ С ОПТИЧЕСКИМИ КАНАЛАМИ ОБМЕНА ИНФОРМАЦИЕЙ, УПРАВЛЕНИЯ И ХРОНИЗАЦИИ | 2016 |
|
RU2626623C1 |
| МОНОИМПУЛЬСНАЯ РЛС МИЛЛИМЕТРОВОГО ДИАПАЗОНА | 2015 |
|
RU2600109C1 |
| Вертолетный радиоэлектронный комплекс для мониторинга сельскохозяйственных угодий | 2018 |
|
RU2692117C1 |
| СПОСОБ ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2537092C2 |
| АЭРОЛОГИЧЕСКИЙ РАДИОЗОНД С ГОМОДИННЫМ ПРИЕМОПЕРЕДАТЧИКОМ СИСТЕМЫ РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2024 |
|
RU2829602C1 |
| Система мониторинга состояния льда и окружающей среды | 2019 |
|
RU2715845C1 |
Изобретение относится к информационно-измерительной системе и может быть использовано в радиолокационной технике для высокоточной оценки ледовой обстановки в районах морской добычи и транспортировки нефтегазовых ресурсов. Достигаемый технический результат - обеспечение однозначности отсчета угловой координаты β при сохранении требуемой точности измерения. Радиолокационная система, реализующая способ, содержит блок управления РЛС, синтезатор частот, генератор М-кода, два модулятора, два усилителя мощности, СВЧ коммутатор, блок управления антенной системой, блок антенной системы, приемопередающую антенну, три приемные антенны, четыре усилителя высокой частоты, четыре смесителя, устройство временной автоматической регулировки усиления, четыре усилителя промежуточной частоты, коммутатор промежуточной частоты, усилитель промежуточной частоты, блок автоматической и ручной регулировки усиления, два блока фазовых детекторов, фазовращатель, два блока аналого-цифровых преобразователей квадратурных сигналов в цифровую форму, блок первичной цифровой обработки, двухпортовое буферное оперативное запоминающее устройство, цифровой измеритель, четыре перемножителя, четыре узкополосных фильтра, опорный генератор, два разовых детектора, два фазометра, сумматор и вычитатель. 2 н.п. ф-лы, 2 ил.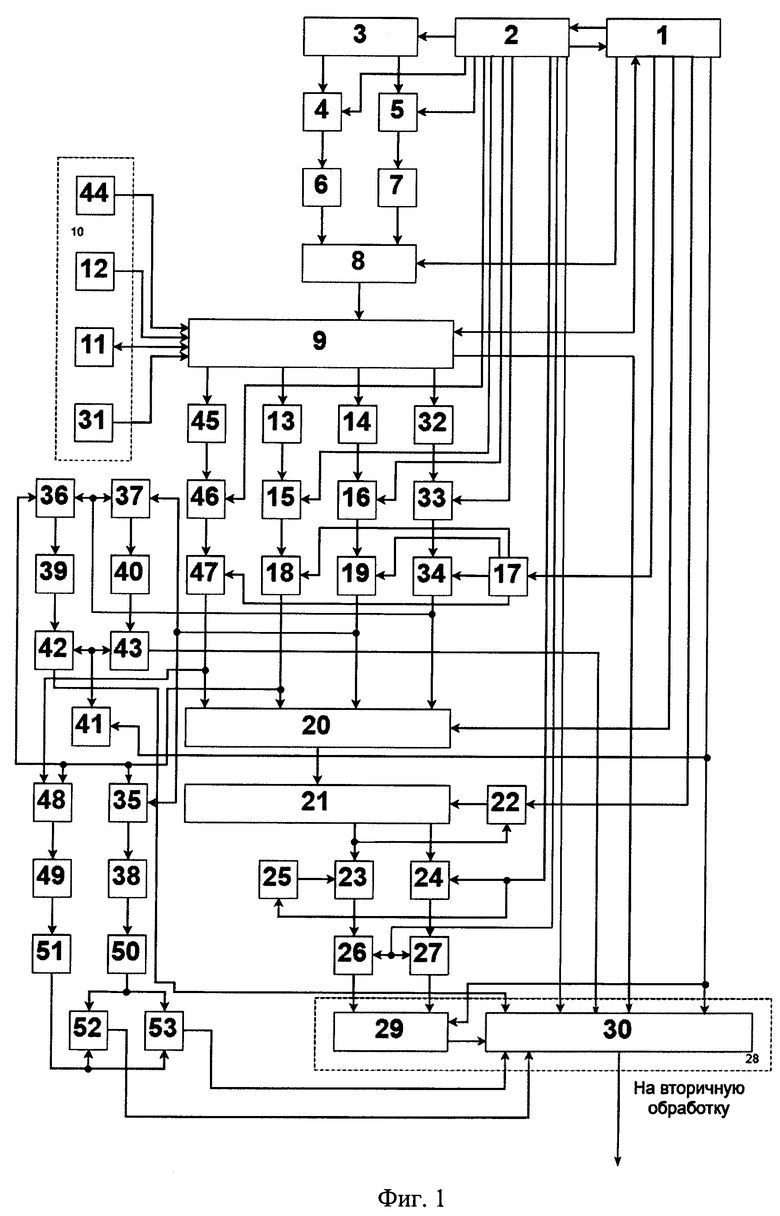
1. Способ обнаружения и высокоточного определения параметров морских ледовых полей, включающий действия на дистанции по обнаружению изменений параметров отраженных сигналов приемопередающей антенной и первой приемной антенной, созданию мониторинга изменений, анализу изменений, при этом радиоизлучение производят приемопередающей антенной, отраженные сигналы принимают приемопередающей антенной и первой приемной антенной, временные отсчеты отраженных сигналов разбивают на секции и для сжатия фазоманипулированных отраженных сигналов производят линейные свертки между отсчетами секций и отсчетами опорных функций, определяющих доплеровское смещение принимаемых сигналов посекционно для эхо-сигналов приемопередающей антенны и первой приемной антенны, накопление результатов сжатия и по ним обнаружение кромки ледового поля, его фрагментов, оценки скорости дрейфа и разности фаз отраженных сигналов, приходящих на приемопередающую антенну и первую приемную антенну, при этом между приемопередающей антенной и первой приемной антенной формируют первую измерительную базу d1 в угломестной плоскости, устанавливают в азимутальной плоскости вторую приемную антенну с возможностью ее вращения с угловой скоростью Ω по окружности вокруг приемопередающей антенны, формируют вторую измерительную базу d2 между приемопередающей и второй приемной антеннами в азимутальной плоскости и третью измерительную базу d3 между первой и второй приемными антеннами в гипотенузной плоскости, сформированные три измерительные базы d1, d2 и d3 размещают в виде прямоугольного треугольника, в вершине которого помещают приемопередающую антенну, перемножают отраженные сигналы на промежуточной частоте ƒпр, выделяют низкочастотные напряжения, сравнивают их по фазе с опорным напряжением с частотой Ω и определяют азимут α, угол места β и угол ориентации γ опасного объекта, по значению трех углов: азимут α, угла места β и угла ориентации γ определяют местоположение опасного объекта, отличающийся тем, что устанавливают в угломестной плоскости третью приемную антенну, формируют четвертую измерительную базу d4 в угломестной плоскости, перемножают отраженные сигналы на промежуточной частоте ƒпр, выделяют низкочастотные напряжения, измеряют разности фаз:


где d1, d4 - измерительные базы;
λ - длина волны;
β - угол места опасного объекта,
определяют сумму разностей фаз
ΔϕΣ=Δϕ1+Δϕ2,
эквивалентную измерению фазового сдвига на измерительной базе, длину которой определяют суммой измерительных баз:
d5=d1+d4,
формируют точную, но неоднозначную шкалу отсчета угла места β опасного объекта, определяют разность разностей фаз

эквивалентную измерению фазового сдвига на измерительной базе, длину которой определяют разностью измерительных баз:
d6=d1-d4,
формируют грубую, но однозначную шкалу отсчета угла места β опасного объекта, между сформированными косвенным методом измерительными базами устанавливают следующее неравенство:
2. Радиолокационная система обнаружения и высокоточного определения параметров морских ледовых полей, содержащая последовательно включенные блок управления РЛС, синтезатор частот, генератор М-кода, первый модулятор, второй вход которого соединен с вторым выходом синтезатора частот, первый усилитель мощности, СВЧ коммутатор, второй вход которого соединен с вторым выходом блока управления РЛС, блок управления антенной системой, второй вход которого связан с блоком управления РЛС, третий вход связан с приемопередающей антенной, а четвертый вход соединен с первой приемной антенной, первый усилитель высокой частоты, первый смеситель, второй вход которого соединен с третьим выходом синтезатора частот, первый усилитель промежуточной частоты, второй вход которого через устройство временной автоматической регулировки усиления соединен с третьим выходом блока управления РЛС, коммутатор промежуточной частоты, второй вход которого через блок автоматической и ручной регулировки усиления соединен с его выходом и с пятым выходом блока управления РЛС, первый блок фазовых детекторов, второй вход которого через фазовращатель соединен с шестым выходом синтезатора частот, первый блок аналого-цифровых преобразователей квадратурных сигналов в цифровую форму, второй вход которого соединен с шестым выходом синтезатора частот, двухпортовое буферное оперативное запоминающее устройство, второй вход которого соединен с седьмым выходом блока управления РЛС, и цифровой измеритель, второй вход которого соединен с шестым выходом синтезатора частот, третий вход соединен с выходом блока управления антенной системы, а выход является выходом блока первичной цифровой обработки, последовательно подключенные к второму выходу генератора М-кода второго модулятора, второй вход которого соединен с третьим выходом синтезатора частот, и второй усилитель мощности, выход которого соединен с третьим входом СВЧ коммутатора, последовательно подключенные к третьему выходу блока управления антенной системы второго усилителя высокой частоты, второго смесителя, второй вход которого соединен с пятым выходом синтезатора частот, и второй усилитель промежуточной частоты, второй вход которого соединен с вторым выходом устройства временной автоматической регулировки усиления, а выход подключен к третьему входу коммутатора промежуточной частоты, последовательно подключенные к выходу усилителя промежуточной частоты второй блок фазовых детекторов, второй вход, которого соединен с шестым выходом синтезатора частот, и второй блок аналого-цифровых преобразователей квадратурных сигналов в цифровую форму, второй вход которого соединен с седьмым выходом синтезатора частот, а выход подключен к третьему входу двухпортового буферного запоминающего устройства, к выходу второй приемной антенны последовательно подключены блок управления антенной системы, третий усилитель высокой частоты, третий смеситель, второй вход которого соединен с девятым выходом синтезатора частот, и третий усилитель промежуточной частоты, второй вход которого соединен с третьим выходом устройства временной автоматической регулировки усиления, а выход подключен к четвертому входу коммутатора промежуточной частоты, к выходу первого усилителя промежуточной частоты последовательно подключены первый перемножитель, второй вход которого соединен с выходом второго усилителя промежуточной частоты, и первый узкополосный фильтр, к выходу первого усилителя промежуточной частоты последовательно подключены второй перемножитель, второй вход которого соединен с выходом третьего усилителя промежуточной частоты, второй узкополосный фильтр и первый дополнительный фазовый детектор, второй вход которого через опорный генератор соединен с пятым выходом блока управления РЛС, а выход подключен к шестому входу цифрового измерителя, к выходу второго усилителя промежуточной частоты последовательно подключены третий перемножитель, второй вход которого соединен с выходом третьего усилителя промежуточной частоты, третий узкополосный фильтр и второй дополнительный фазовый детектор, второй вход которого соединен с выходом опорного генератора, а выход подключен к седьмому входу цифрового измерителя, при этом пятый, шестой и седьмой выходы цифрового измерителя связаны с процессором БПФ, который обеспечивает определение местоположения опасного объекта, приемопередающей антенной, первой и второй приемными антеннами образованы три измерительные базы, расположенные в виде прямоугольного треугольника, в вершине которого расположена приемопередающая антенна с возможностью вращения с частотой Ω вокруг вертикального катета, отличающаяся тем, что она снабжена третьей приемной антенной, четвертым усилителем высокой частоты, четвертым смесителем, четвертым усилителем промежуточной частоты, четвертым перемножителем, четвертым узкополосным фильтром, двумя фазометрами, сумматором и вычитателем, причем третья приемная антенна расположена на вертикальном катете и подключена к шестому входу блока управления антенной системой, к пятому выходу блока управления антенной системой последовательно подключены четвертый усилитель высокой частоты, четвертый смеситель, второй вход которого соединен с десятым выходом синтезатора частот, и четвертый усилитель промежуточной частоты, второй вход которого соединен с четвертым выходом устройства временной автоматической регулировки усиления, а выход подключен к пятому входу коммутатора промежуточной частоты, к выходу первого узкополосного фильтра подключен первый фазометр, к выходу первого усилителя промежуточной частоты последовательно подключены четвертый перемножитель, второй вход которого соединен с выходом четвертого усилителя промежуточной частоты, четвертый узкополосный фильтр и второй фазометр, выходы первого и второго фазометров через сумматор и вычитатель подключены к седьмому и восьмому входам цифрового измерителя соответственно, которые также связаны с процессором БПФ.
| Способ обнаружения и высокоточного определения параметров морских ледовых полей и радиолокационная система для его реализации | 2017 |
|
RU2660752C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ВЫСОКОТОЧНОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ МОРСКИХ ЛЕДОВЫХ ПОЛЕЙ И РАДИОЛОКАЦИОННАЯ СИСТЕМА, ЕГО РЕАЛИЗУЮЩАЯ | 2011 |
|
RU2467347C1 |
| US 5585799 A1, 17.12.1996 | |||
| US 4697254 A, 29.09.1987. | |||

