Настоящее изобретение относится к способу управления поездом, состоящим из рабочих вагонов, для железнодорожного обслуживания (также известных как «железнодорожные ремонтные вагоны»), и, конкретнее, к способу удаленного управления и множественного управления тягой множественных железнодорожных вагонов.
Моторвагонные железнодорожные транспортные средства классифицируются на основе используемого источника электроэнергии и могут быть двух типов: электрические моторвагонные поезда (EMU, Electric Multiple Unit) и дизельные моторвагонные поезда (DMU, Diesel Multiple Unit).
Последний тип может в свою очередь делиться на основе типа передачи: дизельно-электрические моторвагонные поезда (DEMU, Diesel-Electric Multiple Units), дизельно-механические моторвагонные поезда (DMMU, Diesel-Mechanical Multiple Units) и дизельно-гидравлические моторвагонные поезда (DHMU, Diesel-Hydraulic Multiple Units).
Моторвагонные железнодорожные транспортные средства широко используются в качестве пассажирских транспортных средств и характеризуются тем, что содержат однородный состав поезда, так как они используют вагоны одного и того же типа (DMU или EMU) и одной и той же модели вагона.
Управление и архитектура электронных сигналов регулируется посредством соответствующих железнодорожных стандартов, таких как IEC61375-1, UIC556 и UIC647.
Система связи железнодорожного вагона (DMU, EMU, высокоскоростных поездов, локомотивов, пассажирских поездов, трамваев и т.д.) предусматривает интеграцию параметров различных функций и организована в соответствии со специально разработанной архитектурой стандарта, коммуникационного протокола и уровней безопасности данных, обмениваемых для обеспечения взаимодействия вагонов.
Рабочие вагоны (т.е. не пассажирские вагоны), используемые для строительства новых железнодорожных линий или для обслуживания существующих линий, а также железнодорожные вагоны для строительства контактной сети, поезда для обслуживания контактной сети, вагоны для обслуживания рельсов и т.д., которые имеют специальные функции, специальные команды и часто не соответствуют стандартам, используемым для обычных железнодорожных вагонов.
В результате, с целью применения управления подобным типом параметров тяги, торможения и различных аварийных сигналов, возникает необходимость в разработке способа удаленного управления и множественного управления тягой, который может быть применен также к рабочим вагонам различных производителей и оборудованным трансмиссиями различных типов.
Согласно настоящему изобретению, вышеуказанные и дальнейшие цели достигаются посредством способа управления поездом, состоящим из железнодорожных рабочих вагонов, содержащим по меньшей мере два железнодорожных рабочих вагона, образующих железнодорожный поезд; каждый из упомянутых по меньшей мере двух железнодорожных рабочих вагонов содержит многофункциональную шину (MVB, Multifunctional Vehicle Bus) вагона и проводную поездную шину (WTB, Wire Train Bus), которая обеспечивает соединение упомянутых многофункциональных шин (MVB) вагона упомянутых по меньшей мере двух железнодорожных рабочих вагонов; упомянутая многофункциональная шина (MVB) вагона содержит: TCN порт, который соединяет упомянутую проводную поездную шину (WTB) с упомянутой многофункциональной шиной (MVB) вагона; регулятор тяги вагона; и транслятор, который соединяет упомянутый TCN порт с упомянутым регулятором тяги; причем упомянутый способ отличается тем, что: каждый вагон поезда записывает свою собственную максимальную скорость на свой собственный TCN порт; максимальную скорость поезда определяют как наименьшая из максимальных скоростей, определенных на TCN портах отдельными вагонами; ведущий вагон активирует рукоятку регулятора тяги; ведущий вагон отправляет на TCN порт заданную скорость, ниже или равную максимальной скорости поезда, которая должна быть достигнута согласно положению рукоятки тяги; и все вагоны поезда обнаруживают заданную скорость, которая должна быть достигнута, и способствуют тяге до тех пор, пока упомянутая скорость не будет достигнута, регулируя свои скорости крутящими моментами, которые при этом могут отличаться от одного вагона к другому.
Дополнительные характеристики изобретения описаны в зависимых пунктах формулы изобретения.
Существует множество преимуществ этого решения над решениями согласно известному уровню техники.
Применение изобретения позволит:
- бóльшую гибкость работы поезда;
- универсальность состава поезда (с возможностью соединения вагонов, имеющих различные типы тяги);
- легкое и быстрое перемещение вагонов по железной дороге (сокращение времени перемещения вагонов между рабочими местоположениями);
- увеличение производительности вагонов, соединенных вместе (повышение тягового усилия); и
- экономия в эксплуатации парка вагонов со стороны заказчика.
Характеристики и преимущества настоящего изобретения будут очевидны из последующего подробного описания его практического варианта выполнения, который проиллюстрирован путем неограничивающего примера в приложенных чертежах, на которых:
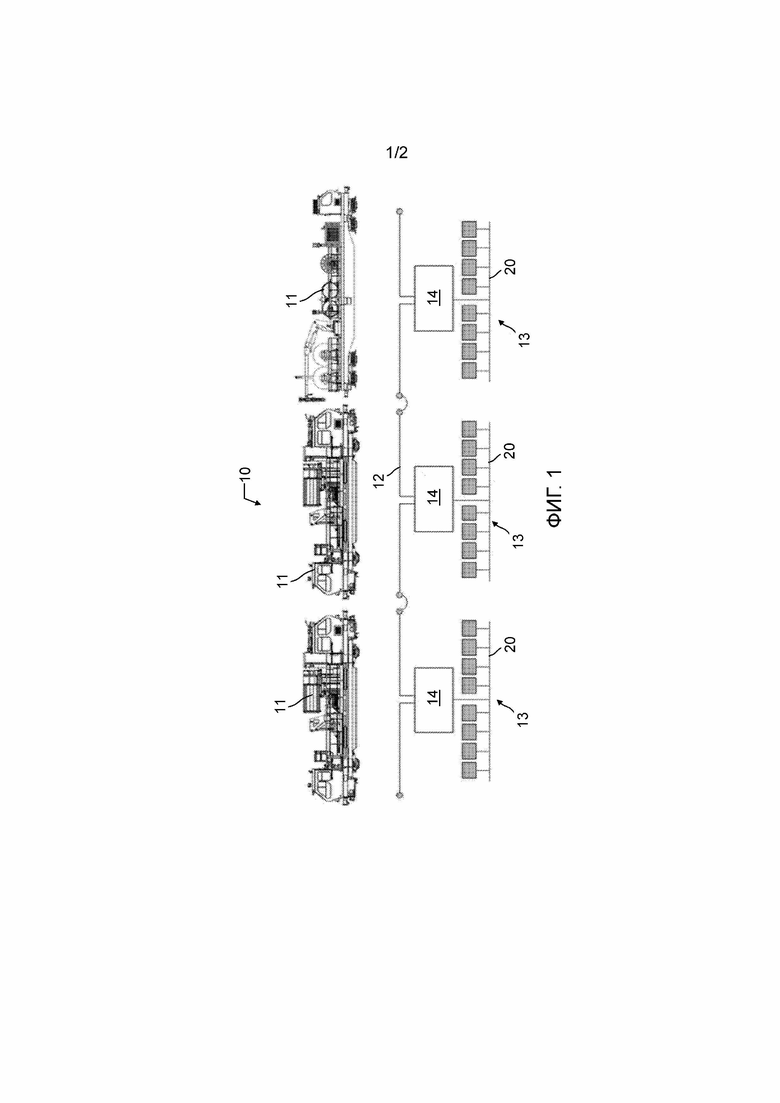
Фигура 1 представляет собой схематическую иллюстрацию WTB соединения между различными вагонами согласно настоящему изобретению; и
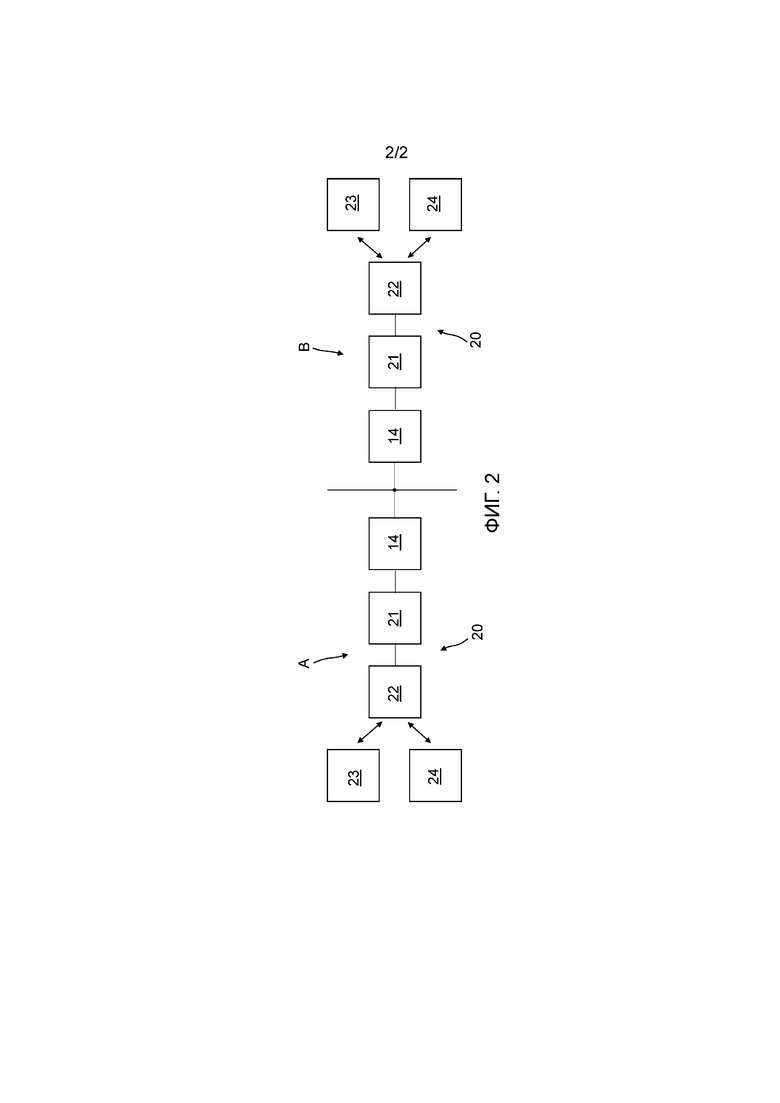
Фигура 2 показывает блок-схему MVB соединения между двумя различными вагонами согласно настоящему изобретению.
Поездная шина определена стандартом IEC 61375-1. Этот стандарт определяет сеть поездной связи (TCN, Train Communication Network), которая включает проводную поездную шину (WTB), которая связывается с многофункциональной шиной (MVB) вагона.
В данном случае представлен поезд 10, образованный множеством железнодорожных рабочих вагонов 11.
Для них создается проводная поездная шина (WTB) 12, которая соединяет различные устройства и средства управления 13, имеющиеся на вагоне, посредством TCN порта 14.
Система дистанционного управления и множественного управления тягой согласно настоящему изобретению предпочтительно обеспечена двумя TCN портами 14, работающими в режиме резервирования.
Когда вагон выполняет роль ведущего вагона в составе поезда, он обеспечивает тягу поезда, при этом когда он выполняет роль ведомого вагона в составе, он обеспечивает удаленное срабатывание создаваемых аварийных сигналов.
Система управления вагонами позволяет управлять тягой и удаленными аварийными сигналами и аварийными сигналами, поступающими от вагонов в составе и отправляемыми посредством проводной поездной шины (WTB) в вагон, когда он выполняет роль ведущего вагона в составе, посредством диагностического терминала мобильного стенда.
Функционирование удаленного управления и любое возможное прерывание линий проводной поездной шины (WTB) должны быть диагностированы, при этом произведенная диагностика встраивается в диагностическую систему вагона.
Архитектура поездной шины предусматривает дублирование средств передачи посредством двух отдельных магистралей для сети поездной связи (проводной поездной шины).
Проводная поездная шина (WTB) 12 взаимодействует с многофункциональной шиной (MVB) 20 вагона, как указано в блок-схеме на Фигуре 2, которая представляет весь процесс управления между двумя вагонами A и B при множественном управлении.
Каждый вагон обеспечен двумя TCN портами 14, хотя на фигуре представлен только один из них.
В случае неисправности активного TCN порта 14 переключение режима резервирования с активного узла на резервный узел происходит автономным образом в течение максим одной секунды.
TCN порт 14 выполняет функцию обмена информацией между проводной поездной шиной и многофункциональной шиной вагона. Данные и параметры обмениваются посредством телеграмм стандарта, определенных соответствующими стандартами.
Среди основных функций TCN порта 14 имеется функция обновления сети (network inauguration), через которую идентифицируются все вагоны, присутствующие в поезде, и определяются основные параметры, с которыми выполняется и регулируется тяга при множественном управлении.
Каждый вагон предоставляет TCN порту 14 свои собственные характеристики и ряд параметров, используемых для тяги при множественном управлении.
Если в составе вагон находится в ведущей конфигурации, он должен обеспечивать тягу поезда, при этом, когда он выполняет роль ведомого вагона, он должен обеспечивать удаленное срабатывание создаваемых аварийных сигналов.
Роль «передачи» информации, которую каждый вагон должен передавать или принимать через удаленное управление, осуществляется посредством транслятора 21.
Транслятор 21 предоставляет TCN порту 14 параметры вагона и запросы на тягу, передаваемые в стандарт удаленного управления.
Подобным образом, транслятор 21 предоставляет системе управления тягой информацию, полученную от TCN порта 14 и передаваемую в стандарт многофункциональной шины 20 вагона.
Транслятор 21 функционирует в качестве интерфейса между системой удаленного управления и регулятором 22 тяги вагона, который содержит устройство 23 обработки тяги и диспетчер 24 устройств.
Система управления тягой вагона имеет аппаратное обеспечение и систему связи, которые полностью независимы и практически уникальны для каждого вагона, присутствующего в поезде, и, следовательно, транслятор 21 выполнен с возможностью функционировать в качестве интерфейса с системой удаленного управления.
Транслятор имеет интерфейс локальной сети контроллеров (CAN), с помощью которого он отправляет и обменивается идентификаторами стандарта с TCN портом 14.
Управление тягой при множественном управлении выполняется посредством выполнения определенных команд на ведущем вагоне, передаваемых на ведомые вагоны поезда. Ведомые вагоны сообщают, что команды выполнены, и передают на проводную поездную шину ряд информации, используемой для тяги. Команды, переданные при множественном управлении, регулируются функциями, определенными в стандарте UIC647.
Каждый вагон, присутствующий в поезде, способен управлять сообщениями, передаваемыми и принимаемыми своими собственными TCN портами 14 для функций тяги, перечисленных ниже:
включение/выключение дизельного двигателя,
управление зарядом аккумуляторной батареи,
стояночный режим,
управление стояночным тормозом,
направления движения.
Каждая команда направляется на ведущий вагон поезда. TCN порт 14 делает их доступными для всего поезда посредством телеграмм, определенных в стандарте UIC556.
Каждый вагон поезда управляет своей собственной тягой, принимая для справки определенные параметры, доступные на TCN порте 14 после обновления сети.
Ниже упрощенным образом описаны этапы, которые определяют управление скоростью тяги вагонов, образующих поезд.
1) Все вагоны поезда записывают значение их максимальной скорости на свой TCN порт 14. Эти значение принимается регулятором 22 тяги и передаются транслятором 21.
2) Максимальная скорость поезда (максимальная скорость, которая может быть достигнута) определяется (через TCN порт 14 во время обновления) как наименьшая из максимальных скоростей, определенных на TCN портах 14 отдельными вагонами. Максимальная скорость появляется автоматически на дисплее всех вагонов, которые составляют поезд.
3) Вагон, который после обновления выполняет ведущую роль, имеет активную рукоятку регулятора тяги. Ведущий вагон отправляет (посредством транслятора 21) на TCN порт 14 заданную скорость, которая должна быть достигнута в зависимости от положения рукоятки тяги. Заданная скорость появляется автоматически на дисплее TCN порта 14 всех вагонов, которые составляют поезд.
4) Все вагоны поезда обнаруживают заданную скорость (считываемую на TCN порте 14, передаваемую транслятором 21 и отправляемую на регулятор 22 тяги), которая должна быть достигнута, и способствуют тяге до тех пор, пока упомянутая скорость не будет достигнута, регулируя свои скорости крутящими моментами, которые при этом могут отличаться от одного вагона к другому (согласно характеристикам отдельных вагонов). Все вагоны поезда обнаруживают мгновенную скорость на TCN порте 14 (передаваемую транслятором 21 и отправляемую на регулятор 22 тяги). Мгновенная скорость на TCN порте 14 каждого вагона формирует ведущим вагоном (отправляется регулятором тяги и передается транслятором 21).
5) Заданная скорость может быть ниже и не более чем равной максимальной скорости.
6) После того, как каждый вагон обнаруживает заданную скорость перед стартовой тягой, он должен установить, что телеграмма «Тяга готова» всех ведомых вагонов поезда включена. Для ведущего вагона телеграмма «Тяга готова» не предусмотрена, так как, если ведущий вагон не способен формировать тягу, он отправляет на TCN порт 14 заданное значение скорости, равное 0.
7) Каждый вагон проверяет телеграммы, содержащие информацию «Аварийное отключение», поступающую от ведущего вагона и от всех ведомых вагонов.
8) Каждый ведомый вагон использует телеграмму «Блокировка тяги» для подавления тяги поезда в случае, отличном от обозначенных ранее.
Например, если максимальная скорость различных вагонов поезда составляет 70 км/ч, 90 км/ч и 100 км/ч, максимальная скорость поезда будет составлять 70 км/ч.
Посредством рукоятки тяги ведущего вагона требуемая скорость устанавливается в режиме круиз-контроля, упомянутая скорость отображается на дисплее в реальном времени и составляет, например, 35 км/ч. Следовательно, заданная скорость поезда составляет 35 км/ч.
Другие примеры команд, которые транслятор 21 отправляет на TCN порт 14, описаны ниже.
Команды включения и выключения двигателя.
После того, как ведущий вагон получает команду включения дизеля, он включает собственный дизельный двигатель и отправляет команду включения дизельного двигателя (импульсный сигнал). Когда ведомый вагон считывает упомянутый сигнал, он должен включить свой собственный дизельный двигатель.
После того, как ведущий вагон получил команду остановки дизельного двигателя, он выключает свой собственный дизельный двигатель и отправляет команду выключения дизельного двигателя (импульсный сигнал). Когда ведомый вагон считывает упомянутый сигнал, он должен выключить свой собственный дизельный двигатель. Все ведомые вагоны отправляют информацию о состоянии своих собственных дизельных двигателей: включение/выключение (циклический сигнал). Все ведомые вагоны выдают информацию об оборотах в минуту своих собственных дизельных двигателей, подавая значение, которое находится в диапазоне от 0 до 100% от максимального значения (циклический сигнал).
Стояночный тормоз. Если вагон играет ведущую роль, он отправляет команду активации/деактивации стояночного тормоза (циклическая команда). Если вагон играет ведущую или ведомую роль, он отправляет информацию о состоянии стояночного тормоза: активировано/деактивировано (циклическая команда).
Направление движения. Если вагон играет ведущую роль и рукоятка смещается вперед, отправляется соответствующий циклический сигнал. Если вагон играет ведущую роль и рукоятка смещается в обратном направлении, выдается соответствующий циклический сигнал.
Ведомый или ведущий вагон видит команду и устанавливает направление движения вперед; если движение вперед успешно активировано, выдается соответствующий циклический сигнал.
Ведомый или ведущий вагон видит команду и устанавливает движение в обратном направлении; если обратное направление успешно активировано, выдается соответствующий циклический сигнал.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ И ДИАГНОСТИКИ МОТОРВАГОННОГО ПОДВИЖНОГО СОСТАВА | 2022 |
|
RU2790985C1 |
| СПОСОБ ФОРМИРОВАНИЯ ПОЕЗДОВ ИЗ ОТДЕЛЬНЫХ ВАГОНОВ | 2005 |
|
RU2460653C2 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ | 2012 |
|
RU2519601C1 |
| БЛОК СВЯЗИ АППАРАТУРЫ СИСТЕМЫ БЕЗОПАСНОСТИ С МНОГОФУНКЦИОНАЛЬНОЙ ПОЕЗДНОЙ ШИНОЙ MVB (БЛОК ШЛЮЗ-CAN-MVB) | 2011 |
|
RU2467904C1 |
| Единая цифровая бортовая платформа безопасности (БСБ-Е) | 2021 |
|
RU2768688C1 |
| ХВОСТОВОЕ УСТРОЙСТВО КОНТРОЛЯ ЦЕЛОСТНОСТИ ПОЕЗДА | 2021 |
|
RU2764478C1 |
| ПОЕЗДНАЯ СИСТЕМА С САМОХОДНЫМ ОДИНОЧНЫМ ВАГОНОМ | 2020 |
|
RU2758921C1 |
| КОМПЛЕКСНОЕ ЛОКОМОТИВНОЕ УСТРОЙСТВО БЕЗОПАСНОСТИ | 2007 |
|
RU2420418C2 |
| СПОСОБ ОБМЕНА ДАННЫМИ ДЫМОВОЙ И ПОЖАРНОЙ СИГНАЛИЗАЦИИ ПОЕЗДА, ОСНОВАННЫЙ НА КОМБИНАЦИИ НЕЗАВИСИМЫХ МОДУЛЕЙ И КОНСТРУКЦИИ ШАССИ 3U | 2016 |
|
RU2674493C1 |
| ПРЕОБРАЗОВАТЕЛЬ ПРОТОКОЛОВ МЕЖДУ ШИНОЙ CPCI И ШИНОЙ ISA И СООТВЕТСТВУЮЩИЙ ЕМУ СПОСОБ ПРЕОБРАЗОВАНИЯ | 2015 |
|
RU2619540C1 |
Изобретение относится к железнодорожной автоматике для управления распределенной тягой и торможением поезда. Способ содержит этапы, где вагоны образуют железнодорожный поезд, каждый из вагонов содержит многофункциональную шину MVB и проводную поездную шину WTB, обеспечивающую соединение шины MVB вагона, шина MVB содержит TCN порт сети поездной связи, который соединяет проводную поездную шину WTB с шиной MVB вагона, регулятор тяги вагона и транслятор, который соединяет TCN порт с регулятором тяги. Причем каждый вагон записывает свою собственную максимальную скорость на свой собственный TCN порт; максимальную скорость поезда определяют как наименьшую из максимальных скоростей, определенных на TCN портах отдельными вагонами; ведущий вагон активирует рукоятку регулятора тяги; ведущий вагон отправляет на TCN порт заданную скорость, ниже или равную максимальной скорости поезда, и все вагоны поезда обнаруживают заданную скорость и способствуют тяге до тех пор, пока упомянутая скорость не будет достигнута, регулируя свои скорости крутящими моментами. Достигается возможность удаленного управления тягой при использовании в составе поездов вагонов различных производителей и оборудованных трансмиссиями различных типов. 4 з.п. ф-лы, 2 ил.
1. Способ управления поездом (10), состоящим из железнодорожных рабочих вагонов (11) для железнодорожного обслуживания, содержащий этапы, на которых: по меньшей мере два железнодорожных рабочих вагона (11) образуют железнодорожный поезд (10); каждый из упомянутых по меньшей мере двух железнодорожных рабочих вагонов (11) содержит многофункциональную шину MVB (20) вагона и проводную поездную шину WTB (12), которая обеспечивает соединение упомянутых многофункциональных шин MVB (20) вагона упомянутых по меньшей мере двух железнодорожных рабочих вагонов (11); упомянутая многофункциональная шина MVB (20) вагона содержит: TCN порт (14), который соединяет упомянутую проводную поездную шину WTB (12) с упомянутой многофункциональной шиной MVB (20) вагона; регулятор (22) тяги вагона и транслятор (21), который соединяет упомянутый TCN порт (14) с упомянутым регулятором (22) тяги; причем упомянутый способ отличается тем, что каждый вагон поезда записывает свою собственную максимальную скорость на свой собственный TCN порт (14); максимальную скорость поезда определяют как наименьшую из максимальных скоростей, определенных на TCN портах (14) отдельными вагонами; ведущий вагон активирует рукоятку регулятора тяги; ведущий вагон отправляет на TCN порт (14) заданную скорость, ниже или равную максимальной скорости поезда, которая должна быть достигнута согласно положению рукоятки тяги; и все вагоны поезда обнаруживают заданную скорость, которая должна быть достигнута, и способствуют тяге до тех пор, пока упомянутая скорость не будет достигнута, регулируя свои скорости крутящими моментами, которые при этом могут отличаться от одного вагона к другому.
2. Способ по п. 1, отличающийся тем, что после того, как каждый вагон обнаруживает заданную скорость, прежде чем прикладывать тягу к колесам, он должен установить, что телеграмма «Тяга готова» всех ведомых вагонов поезда включена.
3. Способ по п. 1, отличающийся тем, что каждый вагон проверяет телеграммы, содержащие информацию «Аварийное отключение», поступающие от ведущего вагона и от всех ведомых вагонов.
4. Способ по предыдущему пункту, отличающийся тем, что, в случае телеграммы «Аварийное включение», все вагоны поезда выполняют отключение тяги.
5. Способ по п. 1, отличающийся тем, что каждый ведомый вагон использует телеграмму «Блокировка тяги» для подавления тяги поезда в случае проблем.
| CN 101654112 A, 24.02.2010 | |||
| KR 20110009381 A, 28.01.2011 | |||
| WO 2005061298 A1, 07.07.2005 | |||
| СПОСОБ УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ТЯГОВОГО ПОДВИЖНОГО СОСТАВА И ЕДИНАЯ КОМПЛЕКСНАЯ СИСТЕМА (ЕКС) ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2355596C1 |

