Изобретение относится к многофункциональным системам и может быть использовано для управления и диагностики моторвагонного подвижного состава (электропоезда) как в ручном, так и в автоматическом режимах.
Известна система управлением движения поезда (RU №2446071, опубл. 27.03.2012, B61L 3/12, B61L 25/00), выбранная в качестве аналога и содержащая в передней и задней кабинах управления поездом соответствующие комплекты устройств единой комплексной системы управления и безопасности движения поезда, каждый из которых содержит соединенные через CAN интерфейс своей кабины управления поездом подсистему автоведения, подсистему автоматического управления служебным торможением и подсистему контроля безопасности движения, состоящую из модуля контроля проследования границ рельсовых цепей, модуля электронной карты маршрута, модуля измерения пройденного пути и модуля памяти длины поезда. В подсистеме контроля безопасности движения модуль коррекции текущей координаты подключен к CAN интерфейсу своей кабины управления поездом, через который модуль коррекции текущей координаты соединен с модулем контроля проследования границ рельсовых цепей, модулем электронной карты маршрута, модулем измерения пройденного пути и модулем памяти длины поезда. Модуль коррекции текущей координаты соединен с портом управления модуля электронной карты маршрута, a CAN интерфейсы кабин управления поездом соединены между собой посредством канала защищенного цифрового обмена данными.
Недостатком указанного решения является отсутствие возможности работы системы в режиме выдачи информации об оптимальном режиме движения при ручном управлении машиниста (режим «подсказки»).
Также в качестве аналога принята система управления движением электроподвижного состава (RU №191737, опубл. 19.08.2019, B61L 27/00, B61L 3/00), которая может быть использована для автоматизации управления и обеспечения безопасности движения пассажирских электропоездов. Система содержит модули внешних устройств, датчики скорости и пути, датчики коррекции пути, катушки индуктивного канала, блок терминала машиниста, бортовые компьютеры, блок радиосвязи с антенной, модуль обработки, модуль команд и межмодульный CAN интерфейс. При этом модули внешних устройств, датчики скорости и пути, катушки индуктивного канала, модули обработки и модули команд образуют подсистему безопасности, а бортовые компьютеры, блок терминала машиниста, датчики коррекции пути и блок радиосвязи с антенной образуют подсистему автоведения.
Недостатком указанной полезной модели является отсутствие возможности интегрирования системы управления с существующей системой безопасности и возможности связи по линии Ethernet с другими системами поезда.
Наиболее близким по технической сущности аналогом, взятым в качестве прототипа заявленного изобретения, является микропроцессорная система управления и диагностики электропоезда (RU 2733594, опубл. 05.10.2020, B60L 15/32), содержащая монитор, предназначенный для отображения текущей информации об измеряемых параметрах электропоезда и аварийных сообщений, блок управления контакторами (БУК), предназначенный для включения-выключения восьми контакторов или реле с номинальным напряжением от 50 до 110 В и током 1,2 А, в соответствии с полученными командами, блок связи с пультом (БСП), предназначенный для ввода в систему 40 дискретных сигналов (напряжением 5 В) от органов управления локомотивом, установленных на пульте управления, блок входных сигналов (БВС), предназначенный для ввода в систему 16-ти дискретных сигналов от цепей управления локомотивов с номинальным напряжением 50 или 110 В; преобразователь напряжения в код (ПНКВ), предназначенный для преобразования входных напряжений в кодовый сигнал с целью передачи его по интерфейсу RS485 в систему, блок связи с датчиками давления (БС-ДД), предназначенный для преобразования напряжений с датчиков давления в последовательный код и передачи их в систему по двум парам линии связи RS485, а также для измерения сопротивления изоляции цепей управления относительно корпуса электропоезда, блок центрального управления (ЦБУ), монитор снабжен блоками автоведения и диагностики, блок контроля температуры букс БКТБ, предназначенный для измерения величины сопротивления температурного датчика, вычисления температуры датчика по его сопротивлению, выявления отказов датчиков температуры, передачи данных с вычисленной температурой по двум линиям связи RS485, блок-преобразователь линий (БПЛ RS485-CAN), предназначенный для пересылки данных из двух гальванически развязанных линий RS485 в две гальванически развязанные линии CAN и наоборот, блок-преобразователь линий (БПЛ RS485-Ethernet), предназначенный для преобразования двух гальванически развязанных линии RS485 в две гальванически развязанные линии Ethernet и наоборот, блок-преобразователь линий (БПЛ RS485-RS485), предназначенный для пересылки данных двух гальванически развязанных линии RS485 в две гальванически развязанные линии RS485 и наоборот, блок связи с радиостанцией (БС-РС), предназначенный для передачи голосовых пожарных сигналов в локомотивную радиостанцию по линии связи ТУ-ТС, модернизированный блок связи с датчиками давления (БС-ДД), предназначенный для контроля положения пневматических кранов и передачи контролируемых данных в систему по двум парам линии связи RS485, ЦБУ соединен с монитором и через линию связи 2х RS485-250 Кбит - с БПЛ RS485-CAN, БПЛ RS485-RS485, БПЛ RS485-Ethernet, БС-РС и БКТБ, а через линию связи 2х RS485-57 Кбит - с БС-СИ2, БС-ДД, БСП и БВС.
Недостатком указанного решения являются:
- ЦБУ соединен с монитором через линию связи RS485, имеющую низкую скорость;
- ограниченный набор интерфейсов ЦБУ, что делает необходимым применение дополнительных преобразователей для связи с вагонным оборудованием;
- информация, связанная с управлением поездом, и вспомогательная информация передаются по одному и тому же интерфейсу;
- отсутствуют связь с системой видеонаблюдения и возможность отображения информации от системы видеонаблюдения на мониторе.
Технический результат предлагаемого изобретения заключается в интеграции систем различного назначения в единый комплекс, оптимизации их конструктивного исполнения и сокращения номенклатуры комплектующих, повышении надежности и обеспечении контроля состояния систем и составных частей электропоезда.
Поставленная задача решается за счет применения комплексной системы управления и диагностики (КСУиД) моторвагонного подвижного состава, содержащей:
- по меньшей мере один дисплей, встроенный в унифицированный пульт управления (УПУ) в головном вагоне и предназначенный для отображения диагностической информации, информации о параметрах движения, а также информации от видеокамер системы видеонаблюдения,
- устройство мониторинга и контроля (УМК), установленное в УПУ и предназначенное для управления системами,
- контроллер машиниста (КМ), предназначенный для изменения направления движения и регулирования тягового и тормозного усилия,
- контроллер пневматического тормоза (КПТ), предназначенный для задания режимов пневматического торможения,
- панели с органами управления,
- блок резервного управления (БРУ), предназначенный для управления электропоездом в случае отказа основных органов управления,
- блок тормоза безопасности электропоезда (БТБЭ), предназначенный для формирования электрической цепи безопасности (ЭЦБ),
- устройство отключения модуля экстренного торможения (УОМЭТ), установленное в каждом вагоне,
- адаптер УПУ, предназначенный для ввода и формирования дискретных сигналов,
- адаптеры вагонные АВ-У, предназначенные для управления вагонным оборудованием и связи с КМ,
- счетчик электрической энергии (СЭЭ), установленный в моторном вагоне, для измерения тока, напряжения и расчета потребляемой электроэнергии и передачи данных по каналу RS485,
- контроллер головной, предназначенный для задания режимов работы пожарно-охранной сигнализации и опроса состояния контроллеров вагонных,
- контроллеры вагонные, установленные в каждом вагоне и предназначенные для контроля состояния охранных и пожарных шлейфов,
- сервер видеонаблюдения, предназначенный для хранения видеоинформации,
- по меньшей мере один видеорегистратор в каждом вагоне,
- управляемые коммутаторы, установленные в каждом вагоне и обеспечивающие работу поездной коммуникационной сети (ПКС), построение карты оборудования электропоезда, резервирование поездной шины Ethernet и диагностику работы ПКС.
Сущность заявляемого технического решения, реализуемость и возможность промышленного применения поясняется чертежом.
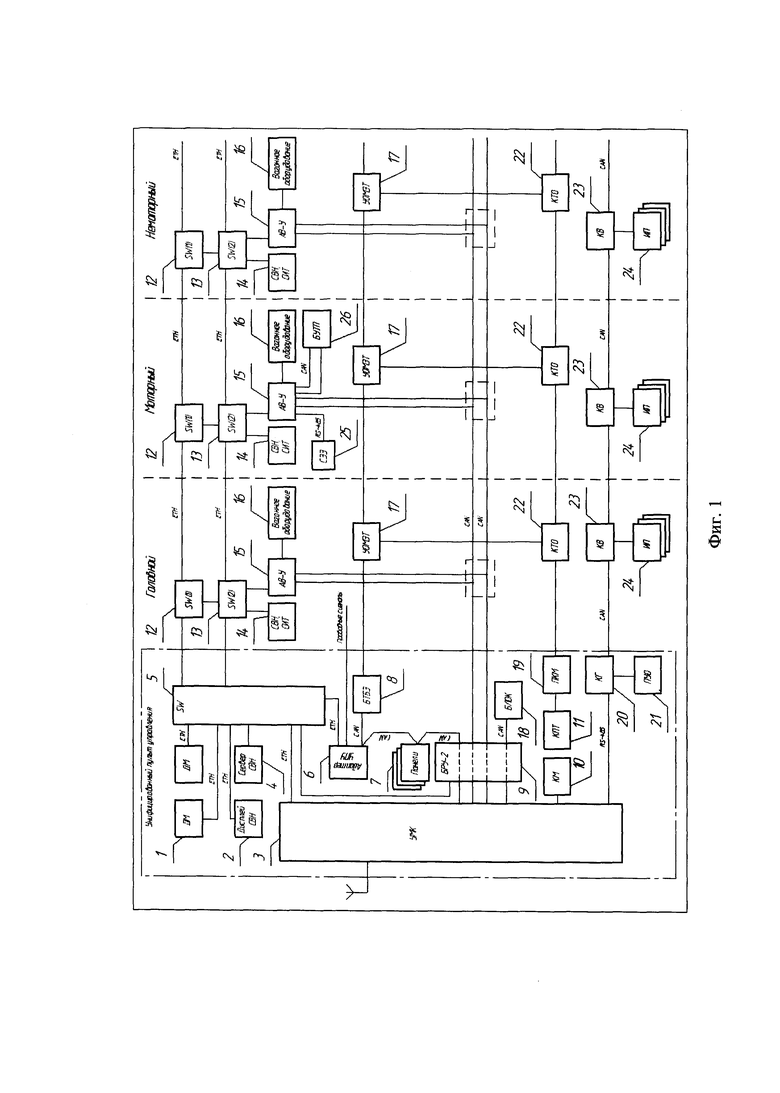
На фигуре 1 представлена структурная схема КСУиД моторвагонного подвижного состава, где
1 - дисплей машиниста;
2 - дисплей системы видеонаблюдения (дисплей СВН);
3 - устройство мониторинга и контроля (УМК);
4 - сервер системы видеонаблюдения (сервер СВН);
5 - коммутатор SW;
6 - адаптер УПУ;
7 - панели УПУ;
8 - блок тормоза безопасности электропоезда (БТБЭ);
9 - блок резервного управления (БРУ);
10 - контроллер машиниста (КМ);
11 - контроллер пневматического тормоза (КПТ);
12 - коммутаторы SW(1);
13 - коммутаторы SW(2);
14 - система видеонаблюдения (СВН);
15 - адаптер вагонный АВ-У;
16 - вагонное оборудование;
17 - устройство отключения модуля экстренного торможения (УОМЭТ);
18 - безопасный локомотивный объединенный комплекс БЛОК;
19 - приставка к крану машиниста (ПКМ);
20 - контроллер головной (КГ);
21 - пульт управления оператора (ПУО);
22 - контейнер тормозного оборудования (КТО);
23 - контроллер вагонный (КВ);
24 - извещатели пожарные (ИП);
25 - счетчик электрической энергии СЭЭ;
26 - блок управления тяговым преобразователем (БУТП).
КСУиД моторвагонного подвижного состава состоит из следующих систем, обеспечивающих основные функции по управлению и контролю движения поезда, перечисленные в порядке понижения иерархии:
- система автоматизированного энергооптимального ведения электропоезда по графику движения (система автоматизированного ведения, CAB);
- система управления пневматическим торможением (СИТЭП);
- блок резервного управления (БРУ);
- система управления работой вспомогательного оборудования;
- системы, осуществляющие контроль технического состояния электропоезда и информационного обеспечения машиниста и пассажиров электропоезда:
- система интеллектуальной диагностики (СИД);
- система информационная транспорта (СИТ);
- поездная коммуникационная сеть (ПКС);
- система записи информации о характеристиках поездки, особенностях работы оборудования в электронную память и передачи информации по радиоканалу причастным службам (система регистрации - CP);
- система видеонаблюдения (СВН);
- система пожарно-охранной сигнализации (ПОС);
- система учета электропотребления электропоездом (СУЭПП);
- унифицированный пульт управления (УПУ) с органами управления (ОУ) и средствами отображения информации (СОИ). Основными СОИ являются дисплеи и индикаторы, размещенные на панелях УПУ.
Система автоматизированного ведения поезда (CAB) обеспечивает автоматизированное энергооптимальное ведение электропоезда по перегонам и станциям, осуществляет информационное обеспечение машиниста всей необходимой информацией для ведения электропоезда.
В состав CAB входят:
- устройство мониторинга и контроля (УМК) 3 - основной блок комплекса, установленный в унифицированном пульте управления (УПУ) в головном вагоне и обеспечивающий взаимодействие систем;
- контроллер машиниста (КМ) 10, установленный в УПУ в головном вагоне и соединенный с УМК 3 по отдельной линии CAN, обеспечивающей помехоустойчивость передачи данных, и формирующий следующие команды: изменение направления движения, плавное регулирование тягового и тормозного усилия;
- органы управления движением электропоезда на УПУ, функционально разбитые на группы и размещенные на отдельных панелях 7 УПУ. Панели 7 оснащены клавишами с нанесенными на них мнемознаками, имеющими подсветку, которая при активации клавиши меняет цвет. Все панели объединены с УМК 3 в единую сеть CAN;
- два дисплея машиниста (ДМ) 1, встроенные в УПУ в головном вагоне, которые через управляемый коммутатор SW 5 соединены с сетью Ethernet, благодаря чему на любом из дисплеев можно вывести как диагностическую информацию, информацию о параметрах движения поезда, а также информацию от видеокамер системы видеонаблюдения;
- адаптер 6 УПУ, установленный в УПУ в головном вагоне и обеспечивающий взаимодействие УПУ с оборудованием электропоезда по проводным каналам связи посредством формирования дискретных команд;
- адаптер вагонный АВ-У 15, установленный в каждом вагоне и подключенный к поездной линии CAN. В моторных вагонах обеспечивает управление блоком управления тягой и торможением (БУТП) 26.
Система управления пневматическим торможением (СИТЭП) обеспечивает электрическое управление пневматическими и электропневматическими тормозами.
В состав СИТЭП входят:
- контроллер пневматического тормоза (КПТ) 11, установленный в УПУ в головном вагоне и предназначенный для задания режимов пневматического торможения;
- приставка к крану машиниста (ПКМ) 19, установленная в УПУ в головном вагоне;
- клапан цепи безопасности (КЦБ), установленный в головном вагоне и производящий разрядку тормозной магистрали темпом экстренного торможения;
- блок тормоза безопасности электропоезда (БТБЭ) 8, установленный в УПУ в головном вагоне, формирующий электрическую цепь безопасности (ЭЦБ), осуществляющий диагностику ЭЦБ и соединенный по линии CAN с УМК 3;
- устройство отключения модуля экстренного торможения (УОМЭТ) 17, установленное в каждом вагоне, и служащее для отключения модуля экстренного торможения контейнера тормозного оборудования, если ЭЦБ деактивирована;
- ЭЦБ, проходящая через все вагоны;
- контейнер тормозного оборудования (КТО) 22, установленный в каждом вагоне.
Блок резервного управления (БРУ) 9 установлен в УПУ в головном вагоне и обеспечивает ручное управление электропоездом в случае выхода из строя основных ОУ.
Диагностирование системой интеллектуальной диагностики (СИД) реализуется в трех режимах: перед отправлением, в пути следования электропоезда и в условиях депо (в процессе и по окончании ремонта). Также предусмотрена функция самодиагностики в пути следования электропоезда с последующим выводом на ДМ 1 выявленной неисправности без запроса машиниста.
В состав СИД входят:
- УМК 3, установленный в УПУ в головном вагоне;
- адаптер вагонный АВ-У 15, установленный в каждом вагоне и предназначенный для ввода дискретных сигналов и формирования дискретных выходных сигналов;
- дисплей с видеокадром диагностики на УПУ.
Система информационная транспорта (СИТ) включает в себя:
- комплект оборудования оповещения и связи, обеспечивающий голосовое оповещение машинистом пассажиров, передачу голосовых сообщений пассажиром машинисту посредством пульта связи «пассажир-машинист» вагона, служебную голосовую связь между кабинами;
- комплект оборудования визуального оповещения.
Поездная коммуникационная сеть (ПКС) объединяет отдельные компоненты электропоезда, обеспечивает передачу информационных и управляющих сигналов для реализации процессов регулирования, управления и диагностики по линиям CAN, Ethernet и RS-485. Включает в себя управляемые коммутаторы SW 5, 12, 13 и кабельную сеть.
В состав системы видеонаблюдения (СВН) 14 входят:
- дисплей 2 СВН с видеокадром видеонаблюдения, встроенный в УПУ в головном вагоне;
- видеорегистраторы, установленные в каждом вагоне и обеспечивающие подключение видеокамер, запись и хранение видеоинформации от каждой камеры до 30 суток;
- сервер 4 СВН, установленный в головных вагонах, обеспечивающий резервное копирование и хранение видеоинформации от видеорегистраторов до 7 суток, диагностику системы видеонаблюдения;
- видеокамеры антивандального исполнения для размещения внутри электропоезда;
- внешние видеокамеры.
Система пожарно-охранной сигнализации (ПОС) обеспечивает обнаружение и извещение об угрозе пожара в вагонах электропоезда, контроль доступа на электропоезд.
В состав ПОС входят:
- контроллер головной (КГ) 20, установленный в головных вагонах и производящий опрос состояния контроллеров вагонных (КВ) 23 по отдельной линии CAN;
- пульт управления оператора (ПУО) 21, установленный на УПУ и содержащий дисплей для вывода информации о состоянии ПОС и клавиатуру;
- контроллер вагонный (КВ) 23, установленный в каждом вагоне, обеспечивающий контроль состояния пожарных и охранных шлейфов;
- извещатели пожарные (ИП) 24, установленные в каждом вагоне и формирующие сигнал тревоги для КВ в случае возникновения пожара или задымления.
Система учета электропотребления поездом (СУЭПП) обеспечивает раздельное измерение расхода электроэнергии электропоезда на тягу, отопление и собственные нужды, измеряет потребляемый ток каждого моторного вагона и напряжение контактной сети и состоит из счетчика электрической энергии СЭЭ (25), соединенного с адаптером вагонным АВ-У по линии RS-485 и подключенных к нему токовых шунтов.
На панелях 7 управления УПУ размещены СОИ и ОУ основным и вспомогательными оборудованием.
КСУиД моторвогонного работает следующим образом: в режиме ручного ведения электропоезда КМ 10 по линии CAN передает в УМК 3 данные о положении реверсивной и главной рукояток. УМК 3, анализируя эти данные, а также данные от безопасного локомотивного объединенного комплекса БЛОК 18, формирует команду управления тягой или торможением и по поездной линии CAN передает ее в адаптеры вагонные АВ-У 15, установленные в каждом вагоне. В случае отказа основных органов управления, формирование команд управления тягой или торможением переходит к БРУ 9. В случае необходимости применения пневматического торможения может быть задействован КПТ 11, который посредством ПКМ 19 воздействует непосредственно на кран машиниста. Адаптер вагонный АВ-У моторного вагона в свою очередь передает полученные данные в БУТП 26. Адаптер вагонный АВ-У 15 по дискретным входам получает диагностическую информацию о состоянии вагонного оборудования 16, а по линии RS-485 от СЭЭ 25 информацию о напряжении сети, потребленной электроэнергии и передает полученную информацию по сети Ethernet в УМК 3 через коммутаторы SW 5, 12, 13. К сети Ethernet также подключены сервер 4 СВН, СВН 14, ДМ 1, дисплей 2 СВН, осуществляющие запись, демонстрацию на дисплеях и резервное архивирование видеоинформации. Для формирования дискретных команд управления электропоездом служит адаптер УПУ 6, которым управляет УМК 3 по отдельной линии CAN. К этой же линии CAN подсоединены панели 7 УПУ с органами управления и БТБЭ 8. БТБЭ 8 формирует напряжение ЭЦБ и контролирует ее состояние. В случае обрыва ЭЦБ БТБЭ 8 вызывает срабатывание клапана цепи безопасности. В каждом вагоне к обратному проводу ЭЦБ подключено УОМЭТ 17, которое формирует сигнал экстренного торможения для КТО 22 в случае разрыва ЭЦБ. УОМЕТ 17 также позволяет отключить модуль экстренного торможения КТО 22 в случае невозможности устранения неисправности ЭЦБ или в случае перегона вагона не в составе поезда. Состояние пожарных и охранных шлейфов, в том числе состояние ИП 24, контролируется КВ 23, которые располагаются в каждом вагоне. Общая информация поступает в КГ 20 и отображается на ПУО 21. К отдельному входу RS-485 УМК 3 от КГ 20 поступает информация для возможности отображения состояния системы пожарно-охранной сигнализации на экране ДМ 1.
Комплексная система управления и диагностики может быть изготовлена приборостроительным предприятием с применением электронных компонентов и блоков, выпускаемых промышленностью.
Разработан эскизный проект комплекса, изготовлен макетный образец унифицированного пульта управления и проведено моделирование комплексной системы управления и диагностики, реализующее описанное выше техническое решение.
Повышение надежности и обеспечение контроля состояния систем и составных частей электропоезда заключается в интеграции систем различного назначения в единый комплекс, оптимизации их конструктивного исполнения и сокращения номенклатуры комплектующих.
В отличие от прототипа в предложенном техническом решении реализован оптимальный набор интерфейсов основного вычислителя для связи с блоками систем комплекса без промежуточных преобразователей, разделение интерфейсов цепей управления и интерфейсов вспомогательной (диагностической) информации с целью повышения надежности, наличие связи с системой пожарно-охранной сигнализации и системой видеонаблюдения с возможностью обработки и отображения оперативной информации на дисплее машиниста.
Заявленное техническое решение имеет отличия от наиболее близких аналогов, соответственно, оно удовлетворяет условию патентоспособности изобретения «новизна».
Техническое решение явным образом не следует из уровня техники. Кроме того, в процессе патентного поиска не выявлены технические решения, имеющие признаки, совпадающие с отличительными признаками заявленного технического решения.
Заявленное техническое решение технически осуществимо, промышленно реализуемо на приборостроительном предприятии, проведенные испытания подтверждают достижения заявленного технического результата. В связи с этим заявленное техническое решение соответствует условию патентоспособности «промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| МИКРОПРОЦЕССОРНАЯ СИСТЕМА УПРАВЛЕНИЯ И ДИАГНОСТИКИ ЭЛЕКТРОПОЕЗДА | 2018 |
|
RU2733594C2 |
| СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ И ОПОВЕЩЕНИЯ ПАССАЖИРОВ НА ЭЛЕКТРОПОЕЗДЕ | 2018 |
|
RU2741152C2 |
| КОМПЛЕКТ АППАРАТУРЫ ДЛЯ ИНФОРМИРОВАНИЯ ПАССАЖИРОВ (КАИП) | 2022 |
|
RU2785443C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИОННЫХ СООБЩЕНИЙ В МИКРОПРОЦЕССОРНЫХ СИСТЕМАХ УПРАВЛЕНИЯ И ДИАГНОСТИКИ | 2015 |
|
RU2577196C1 |
| Бортовое навигационное коммуникационное устройство | 2017 |
|
RU2657152C1 |
| НАВИГАЦИОННОЕ КОММУНИКАЦИОННОЕ МОБИЛЬНОЕ УСТРОЙСТВО МАНЕВРОВОГО ЛОКОМОТИВА | 2012 |
|
RU2503566C1 |
| СИСТЕМА МОНИТОРИНГА ЭЛЕКТРОПОЕЗДОВ | 2008 |
|
RU2386563C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2006 |
|
RU2326016C2 |
| БЛОК АВТОВЕДЕНИЯ АВ-САУТ | 2024 |
|
RU2834103C1 |
| ЛОКОМОТИВНАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ | 2013 |
|
RU2554912C2 |
Изобретение относится к области систем управления и диагностики моторвагонного подвижного состава. Комплексная система управления и диагностики моторвагонного подвижного состава содержит по меньшей мере один дисплей, встроенный в унифицированный пульт управления (УПУ), связанное с сетью Ethernet устройство мониторинга и контроля (УМК), контроллер машиниста, контроллер пневматического тормоза, адаптер УПУ, установленный в УПУ, панели с органами управления, установленные на УПУ и связанные с УМК единой сетью CAN, адаптеры вагонные АВ-У, соединенные с УМК поездной линией CAN и Ethernet, счетчик электрической энергии. При этом дополнительно введены блок тормоза безопасности электропоезда, блок резервного управления, контроллеры вагонные, связанные между собой через отдельную линию CAN, контроллер головной, сервер видеонаблюдения, по меньшей мере один видеорегистратор в каждом вагоне электропоезда, устройство отключения модуля экстренного торможения, управляемые коммутаторы. Технический результат изобретения заключается в повышении надежности и обеспечении контроля состояния систем и составных частей электропоезда. 2 з.п. ф-лы, 1 ил.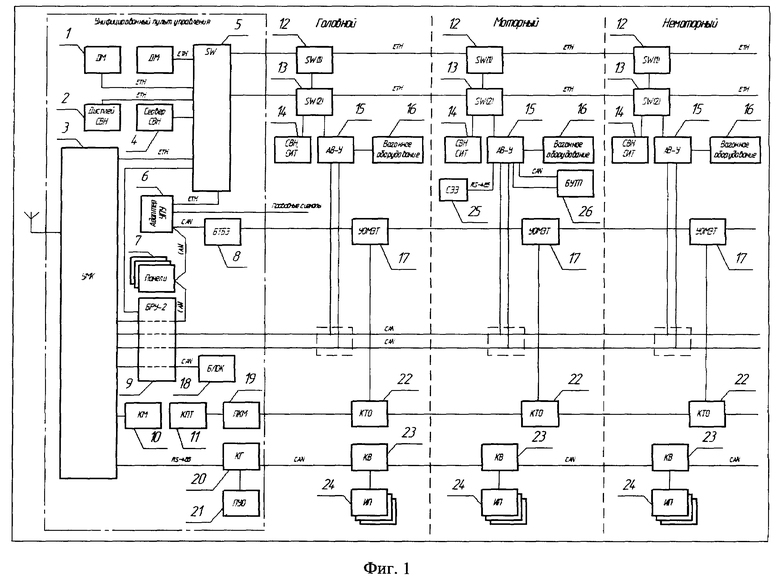
1. Комплексная система управления и диагностики моторвагонного подвижного состава, содержащая по меньшей мере один дисплей, встроенный в унифицированный пульт управления (УПУ), связанное с сетью Ethernet устройство мониторинга и контроля (УМК), контроллер машиниста, контроллер пневматического тормоза, адаптер УПУ, установленный в УПУ, панели с органами управления, установленные на УПУ и связанные с УМК единой сетью CAN, адаптеры вагонные АВ-У, соединенные с УМК поездной линией CAN и Ethernet, счетчик электрической энергии, отличающаяся тем, что дополнительно введены блок тормоза безопасности электропоезда, блок резервного управления, контроллеры вагонные, связанные между собой через отдельную линию CAN, контроллер головной, сервер видеонаблюдения, по меньшей мере один видеорегистратор в каждом вагоне электропоезда, устройство отключения модуля экстренного торможения, управляемые коммутаторы.
2. Комплексная система управления и диагностики моторвагонного подвижного состава по п. 1, отличающаяся тем, что блок тормоза безопасности электропоезда, блок резервного управления, контроллер головной, сервер видеонаблюдения установлены в головном вагоне.
3. Комплексная система управления и диагностики моторвагонного подвижного состава по п. 1, отличающаяся тем, что контроллеры вагонные, устройство отключения модуля экстренного торможения, управляемые коммутаторы установлены в каждом вагоне.
| МИКРОПРОЦЕССОРНАЯ СИСТЕМА УПРАВЛЕНИЯ И ДИАГНОСТИКИ ЭЛЕКТРОПОЕЗДА | 2018 |
|
RU2733594C2 |
| СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ И ОПОВЕЩЕНИЯ ПАССАЖИРОВ НА ЭЛЕКТРОПОЕЗДЕ | 2018 |
|
RU2741152C2 |
| ИНСТРУМЕНТАЛЬНАЯ СТАЛЬ | 0 |
|
SU185070A1 |
| US 10046778 B2, 14.08.2018. | |||

