Настоящее изобретение относится к агрегату манипулирования фруктовыми и овощными продуктами.
Компании, которые разрабатывают автоматизированные системы манипулирования и проверки больших количеств плодоовощной продукции, часто сталкиваются с проблемами, которые нелегко разрешить.
На самом деле, даже когда система предназначена для использования с единственным, конкретным типом продукции (например, плодовой), на входе в нее обычно подаются большие количества продукции, которая поступает на фабрику прямо с полей, с которых снимается урожай, и которая, вследствие этого, демонстрирует огромную изменчивость размера и массы.
Вследствие этого, существует потребность в предоставлении автоматизированных линий, которые допускают распределение продукции различных категорий размеров по множеству пунктов приема, в которых часто плоды (или другую плодоовощную продукцию) большего размера (или большей массы) нельзя подавать для последующей обработки, или конечным потребителям, вместе с меньшими плодами.
Кроме того, кажется очевидным, что в промышленном контексте и, вследствие этого, в системах и линиях, которые являются по меньшей мере частично автоматизированными, именно эта огромная изменчивость требует максимальной осторожности со стороны компаний, которые их создают, поскольку линии и элементы манипулирования должны быть достаточно универсальными, чтобы была возможность соответствия различным форматам в которых представлены груши, яблоки, клубника, вишня и т.д.
К такой разнородности также необходимо добавить большое множество дефектов, которые могут иметь плоды, и которые система должна быть способна перехватывать для того, чтобы подавать в находящиеся далее пункты только ту продукцию, которая попадает в рамки заданных параметров качества (которые кроме того становятся все более строгими), и отклонять для переработки или просто для выбраковки те плоды, которые являются гнилыми или битыми, демонстрируют начальные признаки раннего распада или обнаруживают другие дефекты.
В таком контексте одним из плодов, которые создают наибольшие трудности, является, безусловно, груша: чтобы иметь возможность идентифицировать дефекты и в то же время проверять ее цвет и вес (и, следовательно, категорию ее размера), известны системы, которые включают использование видеокамер для проверки, которые расположены вдоль линий манипулирования плодов и способны идентифицировать дефекты.
Такие системы обычно имеют бок-о-бок две линии манипулирования, в которых после того, как первая видеокамера проводит первую проверку груши, транспортируемой по первой линии, для того, чтобы выявить ее форму, размер, цвет, любые дефекты поверхности и мякоти и т.д., груша переворачивается и перемещается на вторую линию, где вторая видеокамера для завершения анализа проводит вторую проверку другой стороны груши.
Однако, своеобразная форма груши делает по существу невозможной проверку точного расположения, в котором груша находится и перемещается на первой линии и, в частности, в какой точке соответствующего блока локализации в результате находится груша, которая перемещается по второй линии.
Это усложняет вторую проверку в том, что для такой операции необходимо иметь возможность рассчитывать определенное положение (обычно соответствующее центру блока локализации) для того, чтобы получать точное измерение с помощью динамометрических элементов и/или других датчиков, которые обычно используются, и в частности это вызывает необходимость иметь третью линию или пункт для проведения взвешивания.
Цель настоящего изобретения состоит в том, чтобы решить упомянутые выше проблемы за счет предоставления агрегата манипулирования, который обеспечивает возможность перемещения плодоовощной продукции между двумя линиями манипулирования, имея в то же время возможность управлять их размещением, по меньшей мере на находящейся дальше линии.
В рамках этой цели задача изобретения состоит в предоставлении агрегата манипулирования плодоовощной продукции, который обеспечивает возможность проверки цвета, категории размера и/или наличия на ней дефектов, и в то же время обеспечивает возможность их взвешивания.
Еще одна задача изобретения состоит в предоставлении агрегата манипулирования, который обеспечивает высокую надежность работы.
Еще одна задача изобретения состоит в предоставлении агрегата манипулирования, который может быть легко выполнен с использованием элементов и материалов, которые легко доступны на рынке.
Еще одна задача изобретения состоит в предоставлении агрегата манипулирования, который имеет низкую стоимость и безопасное применение.
Эта цель и эти и другие задачи выполняются посредством агрегата манипулирования плодоовощной продукцией, который содержит первые блоки локализации плодоовощной продукции, которые могут двигаться по первой линии транспортировки и/или управления, и вторые блоки локализации плодоовощной продукции, которые могут двигаться по второй линии транспортировки и/или управления, которая расположена сбоку и рядом с указанной первой линией, отличающийся тем, что он содержит множество средств перемещения плодоовощной продукции, при этом указанные средства распределяются по меньшей мере вдоль части указанной первой линии и могут выборочно приводиться в действие электронным блоком регулирования и управления, для перемещения каждого продукта из указанного первого блока в соответствующий указанный второй блок на участке, выбранном из множества различных участков указанной первой линии, при наступлении заданного состояния взаимного выравнивания между плодоовощным продуктом, подлежащим перемещению, который перемещается указанным первым блоком, и указанным вторым блоком.
Дополнительные характеристики и преимущества изобретения станут лучше понятны из описания предпочтительного, но не исключительного варианта осуществления агрегата манипулирования согласно изобретению, который проиллюстрирован в виде неограничивающего примера на сопровождающих чертежах, на которых:
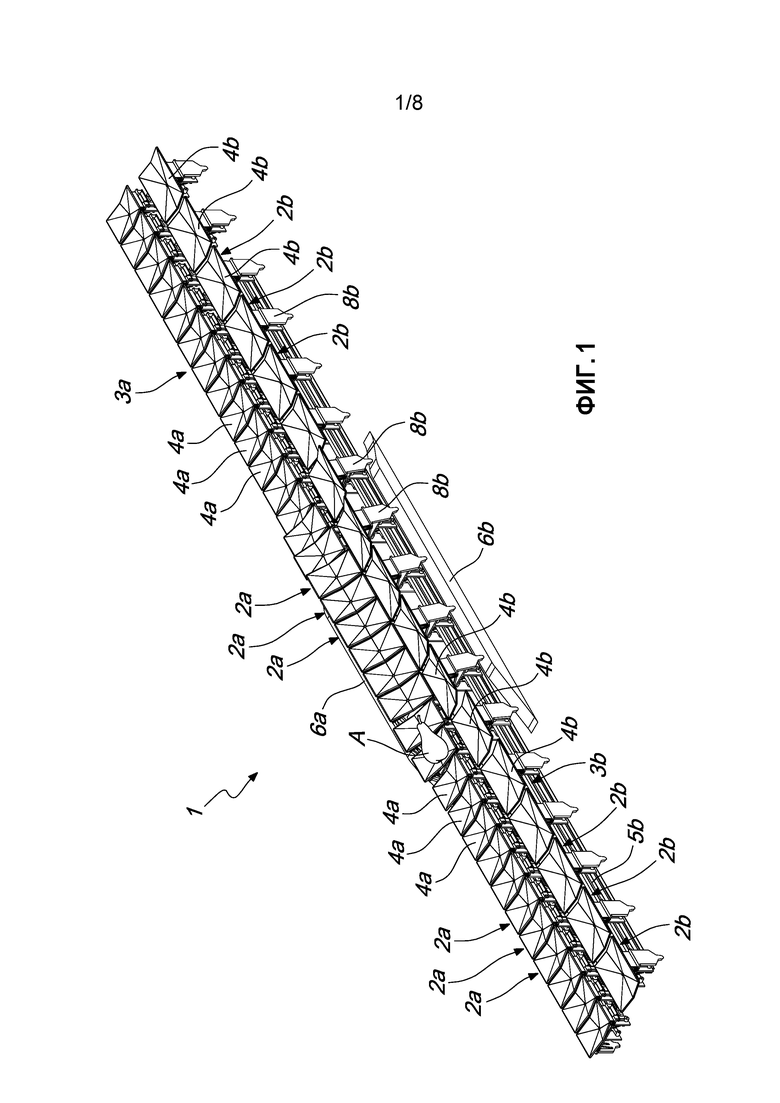
Фигура 1 представляет собой вид в перспективе с правой стороны агрегата манипулирования согласно изобретению;
Фигура 2 представляет собой вид в перспективе с левой стороны агрегата манипулирования на фигуре 1;
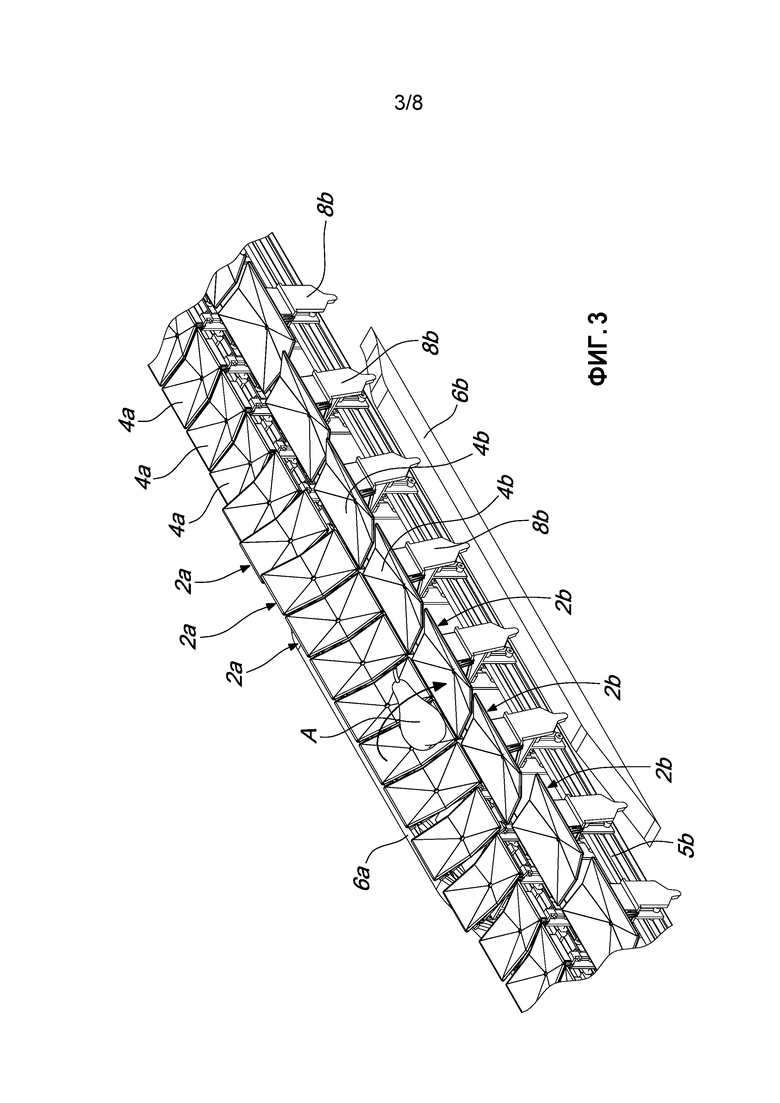
Фигура 3 представляет собой первую деталь фигуры 1;
Фигура 4 представляет собой сильно увеличенную вторую деталь фигуры 1;
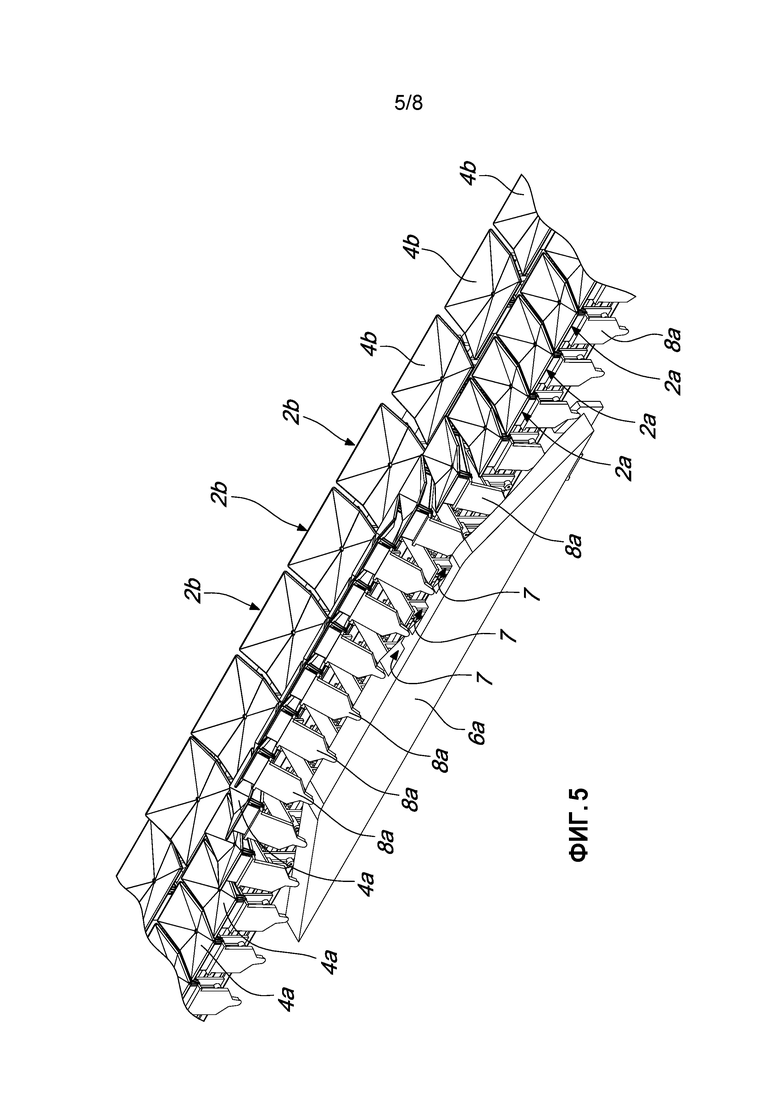
Фигура 5 представляет собой сильно увеличенную деталь фигуры 2;
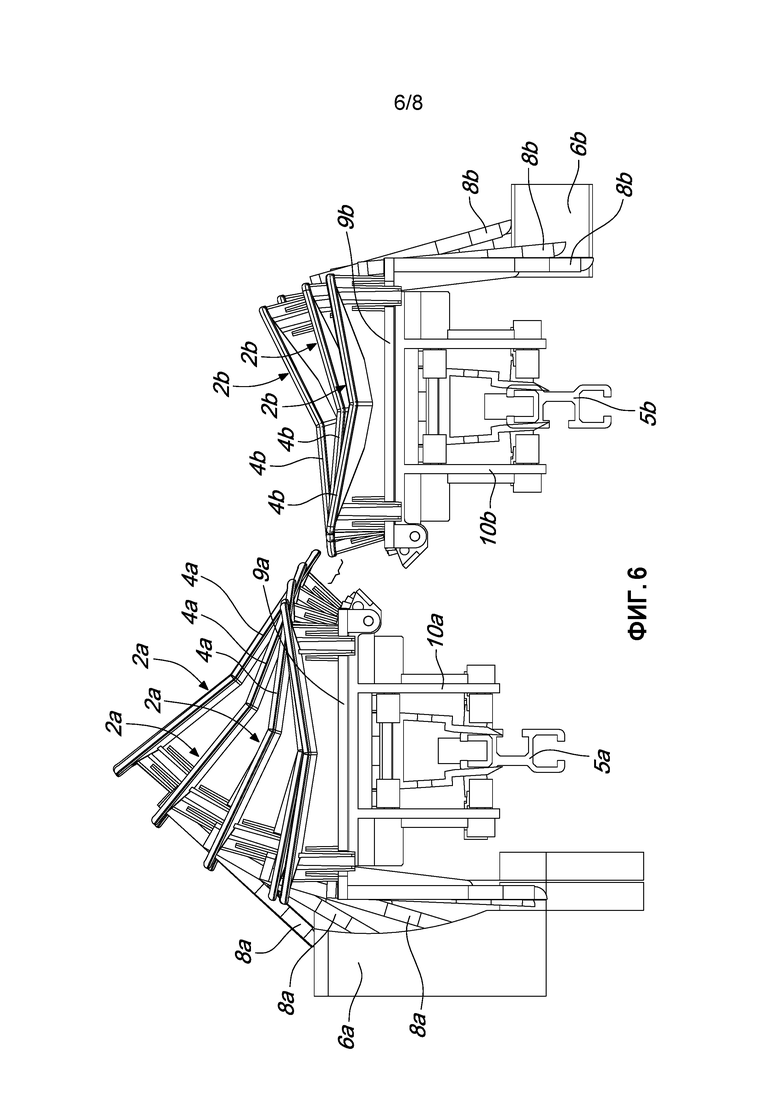
Фигура 6 представляет собой вид в вертикальном разрезе спереди некоторых составных элементов агрегата на фигуре 1;
Фигура 7 представляет собой вид в перспективе с правой стороны дополнительных составных элементов агрегата на фигуре 1;
Фигура 8 представляет собой вид в перспективе с левой стороны составных элементов на фигуре 6.
Со ссылкой на фигуры, ссылочный номер 1 в целом обозначает агрегат манипулирования садоводческой продукции, такой как плодоовощная продукция, который прежде всего содержит первые блоки 2a локализации плодоовощной продукции (фруктовых и овощных продуктов) A, которые могут двигаться по первой линии 3a транспортировки и/или управления.
С этой точки впереди следует отметить, что в предпочтительном варианте применения изобретения, на который в настоящем обсуждении часто будет делаться ссылка, плодоовощной продукцией A являются груши, своеобразная форма которых создает много проблем для компаний, которые делают обычные транспортирующие и проверочные системы (проблемы, которые, как будет видно, будут решены посредством агрегата 1 согласно изобретению).
В любом случае следует подчеркнуть, что не исключается вероятность использования агрегата 1 согласно изобретению манипулирования, транспортировки и/или проверки других плодов или плодоовощной продукции A в целом, оставаясь в то же время в пределах объема защиты, заявленного в данном документе.
Кроме того, агрегат 1 содержит вторые блоки 2b локализации плодоовощной продукции A, которые могут двигаться по второй линии 3b транспортировки и/или управления, которая обычно расположена сбоку рядом и близко к первой линии 3a.
Как на сопровождающих фигурах, линии 3a, 3b могут образовывать для соответствующего блока 2a, 2b прямые пути, которые расположены полностью бок-о-бок, но также могут быть предоставлены агрегаты 1, в которых линии 3a, 3b, хотя находятся бок-о-бок и взаимно близко по меньшей мере в одном своем сегменте, являются изогнутыми или смешанными, согласно конкретным логистическим требованиям, которые могут, например, применяться внутри здания, для которого предназначен агрегат 1.
Согласно изобретению, агрегат 1 содержит множество средств перемещения плодоовощной продукции A, которые распределены и действуют по меньшей мере вдоль одной части первой линии 3a.
Вследствие этого, такие средства могут выборочно приводиться в действие электронным блоком регулирования и управления с тем, чтобы вызывать перемещение каждого продукта A из первого блока 2a в соответствующий второй блок 2b на участке, выбранном из множества различных участков первой линии 3a. Более точно и благодаря наличию множества средств, которые действуют вдоль первой линии 3a, перемещение может эффективно запускаться при наступлении заданного состояния взаимного выравнивания между плодоовощной продукцией A, подлежащей перемещению, которая перемещается до этого момента первым блоком 2a, и вторым блоком 2b.
На самом деле следует отметить, что невозможность установления заранее положения, принимаемого каждой грушей в соответствующем первом блоке 2a локализации, делает невозможной идентификацию (на этапе проектирования) места первой линии 3a, в котором для всех груш возникает заданное состояние взаимного выравнивания, а еще менее возможно обеспечить в связи с этим, чтобы обе линии 3a, 3b двигались с одинаковой скоростью.
Наоборот, такое состояние взаимного выравнивания на самом деле становится необходимым в связи с необходимостью управления размещением плодоовощной продукции по меньшей мере во вторых блоках 2b для того, чтобы обеспечивать, чтобы каждая груша располагалась в одном и том же месте каждого второго блока 2b.
Вследствие этого, благодаря средствам для перемещения электронный блок может выбирать в каждом случае, для каждой груши наилучший участок первой линии 3a, в котором выполнить перемещение, получая таким образом способность управлять ее размещением по второй линии 3b, и уже достигая установленной цели.
На самом деле, за счет целесообразного выбора состояния для взаимного выравнивания, можно, например, обеспечить, чтобы каждая груша перемещалась в соответствующий второй блок 2b локализации в конкретном месте (конкретной части) последнего, достигая таким образом требуемого управления размещением.
Следует отметить, что электронный блок можно выбирать свободно, оставаясь в то же время в пределах заявленного в данном документе объема защиты: на самом деле это может быть электронный контроллер, (микро)процессор, ЦПУ, ПК, компьютер и т.д.
Точно со ссылкой на предпочтительный (но не исключительный) вариант осуществления, каждый второй блок 2b локализации связан с соответствующим устройством для взвешивания перемещаемой плодоовощной продукции A.
Можно использовать любой тип устройства для взвешивания, а, например, каждый второй блок 2b может быть снабжен соответствующим динамометрическим элементом.
Следует отметить, что взвешивающие устройства указанного выше типа вызывают необходимость точного размещения продукта А относительно второго блока 2b, который его вмещает, для того, чтобы была возможность правильной работы: вследствие этого, в таком контексте очевидно, что агрегат 1 обеспечивает оптимальное взвешивание благодаря возможности выбора момента, в который выполнять перемещение во второй блок 2b локализации.
Дополнительно со ссылкой на предпочтительный вариант осуществления изобретения, агрегат 1 содержит электронное устройство управления, которое, в свою очередь, снабжено первой видеокамерой, которая обращена на первую линию 3a и способна проверять цвет, размер и/или наличие дефектов поверхности и мякоти различных типов на плодоовощной продукции A, когда она поддерживается и перемещается первыми блоками 2a в первом расположении. Следует отметить, что такое первое расположение (в котором груша показана, например, на фигуре 1) обычно соответствует положению, в котором каждый продукт A был помещен на соответствующем первом блоке 2a локализации в начальном сегменте первой линии 3a. Вследствие этого, каждый продукт A перемещается в таком первом расположении по первой линии 3a, а часть его поверхности, направленная вверх, таким образом может проверяться первой видеокамерой над первой линией 3a.
Кроме того, устройство 2b управления снабжено второй видеокамерой, которая обращена на вторую линию 3b таким образом, чтобы она также могла проверять цвет, размер и/или наличие дефектов поверхности и мякоти различных типов на плодоовощной продукции A, когда она поддерживается и перемещается вторыми блоками 2b во втором расположении (в котором груша показана, например, на фигуре 3), получающемся автоматически в результате перемещения продукции A с первой линии 3a на вторую линию 3b.
Более точно, перемещение вызывает частичный переворот каждой груши, которая таким образом принимает второе расположение и направляет вверх другой участок поверхности, который, вследствие этого, может, в свою очередь, проверяться второй видеокамерой (над второй линией 3b), завершая таким образом проверку цвета, категории размера и/или наличия каких-либо дефектов (и формы и размера) для каждого плодоовощного продукта A.
Вследствие этого, следует отметить, что в предпочтительном варианте осуществления агрегат 1 способен эффективно взвешивать каждую грушу (или другой плодоовощной продукт A) и/или проверять на наличие в нем дефектов поверхности (по всей поверхности) и дефектов мякоти и/или более просто измерять ее размер.
Следует еще раз отметить, что также не исключается возможность применения инновационных концепций, проиллюстрированных в данном документе, для разных обрабатывающих агрегатов 1, оставаясь в то же время в пределах объема защиты заявленного в данном документе.
В варианте осуществления, проиллюстрированном на сопровождающих фигурах с целью неограничивающего примера, каждый первый блок 2a состоит по существу из первого лотка 4a, который может двигаться по первому направляющему устройству 5a, которое по существу образует первую линию 3a. Кроме того, каждый первый лоток 4a может поворачиваться вокруг первой главной оси, по существу параллельной первому направляющему устройству 5a: вследствие этого, ранее упомянутые средства содержат элементы для запуска поворота соответствующих первых лотков 4a вокруг первой главной оси. Как можно видеть, например, на фигуре 3, такой поворот создает частичное опрокидывание соответствующего первого лотка 4a, и это вызывает последующее перемещение соответствующего плодоовощного продукта A (который, в свою очередь переворачивается) на соответствующий второй блок 2b.
Дополнительно следует отметить, что в результате опрокидывания плодоовощной продукт A автоматически проходит из первого расположения во второе расположение (для того, чтобы обеспечить завершение проверки на любые имеющиеся дефекты, как уже было видно).
Обычно для того, чтобы иметь возможность выполнения перемещения при заданном состоянии взаимного выравнивания, устройство управления содержит электронное средство просмотра (необязательно совпадающее или интегрированное с первой видеокамерой), связанное с электронным блоком и расположенное вдоль первой линии 3a. Средство просмотра на самом деле способно запрашивать обычными способами информацию о положении, принимаемом каждым плодоовощным продуктом A в соответствующем первом блоке 2a. В свою очередь, электронный блок будет снабжен алгоритмом расчета участка (места) первой линии 3a, соответствующего возникновению заданного состояния взаимного выравнивания, в качестве функции формы и скорости первого блока 2a и второго блока 2b и положения, выявленного средством просмотра.
Вследствие этого, какое бы положение ни принимала груша в соответствующем первом лотке 4a, электронный блок способен рассчитывать и идентифицировать момент, в котором возникает заданное состояние взаимного выравнивания, для того, чтобы прямо в этот момент подать команду перемещения груши на вторую линию 3b, получая таким образом точное и повторяемое размещение на вторых блоках 2b.
Следует отметить, что электронный блок регулирования и управления может быть запрограммирован свободно выбирать любое заданное состояние взаимного выравнивания. В предпочтительном варианте осуществления в любом случае такое заданное состояние соответствует выравниванию плодоовощного продукта A, подлежащего перемещению, который перемещается соответствующим первым блоком 2a с центральным участком соответствующего второго блока 2b таким образом, чтобы плодоовощной продукт A располагался точно в таком центральном положении. Как уже на самом деле было видно, таким образом можно получать правильное взвешивание каждой груши за счет того, что устройство, разработанное для этой цели, лучше всего работает, когда груша расположена точно в центре второго блока 2b.
В варианте осуществления, проиллюстрированном на сопровождающих фигурах, и способом, аналогичным тому, который был рассмотрен для первых блоков 2a, каждый второй блок 2b локализации состоит по существу из второго лотка 4b, который может двигаться по второму направляющему устройству 5b, которое по существу образует вторую линию 3b и имеет форму и размеры, которые необязательно отличаются от формы и размеров первого лотка 4a. На самом деле следует отметить, что в показанном решении каждый второй лоток 4b, хотя в плане является прямоугольным, как и первый лоток 4a, значительно больше относительно последнего (и ориентирован длинными сторонами параллельно второму направляющему устройству 5b). Это на самом деле обеспечивает возможность достижения лучшего размещения груш во вторых блоках 2b и, вследствие этого, более точного взвешивания.
Кроме того и с дополнительной аналогией с первыми блоками 2a, каждый второй лоток 4b также может поворачиваться вокруг второй главной оси, которая по существу параллельна первой главной оси и второму направляющему устройству 5b. Вследствие этого, это обеспечивает возможность получения частичного опрокидывания вторых лотков 4b в направлении, противоположном направлению частичного опрокидывания первых лотков 4a, по меньшей мере во время перемещения соответствующего плодоовощного продукта A.
Таким образом, на самом деле, когда груша перемещается во второй блок 2b, ее частичное опрокидывание уменьшает опасность (защищает от нее), что перемещение произойдет без требующейся плавности и/или что чрезмерная тяга сможет вызвать падение груши со второй линии 3b, перелетая второй лоток 4b.
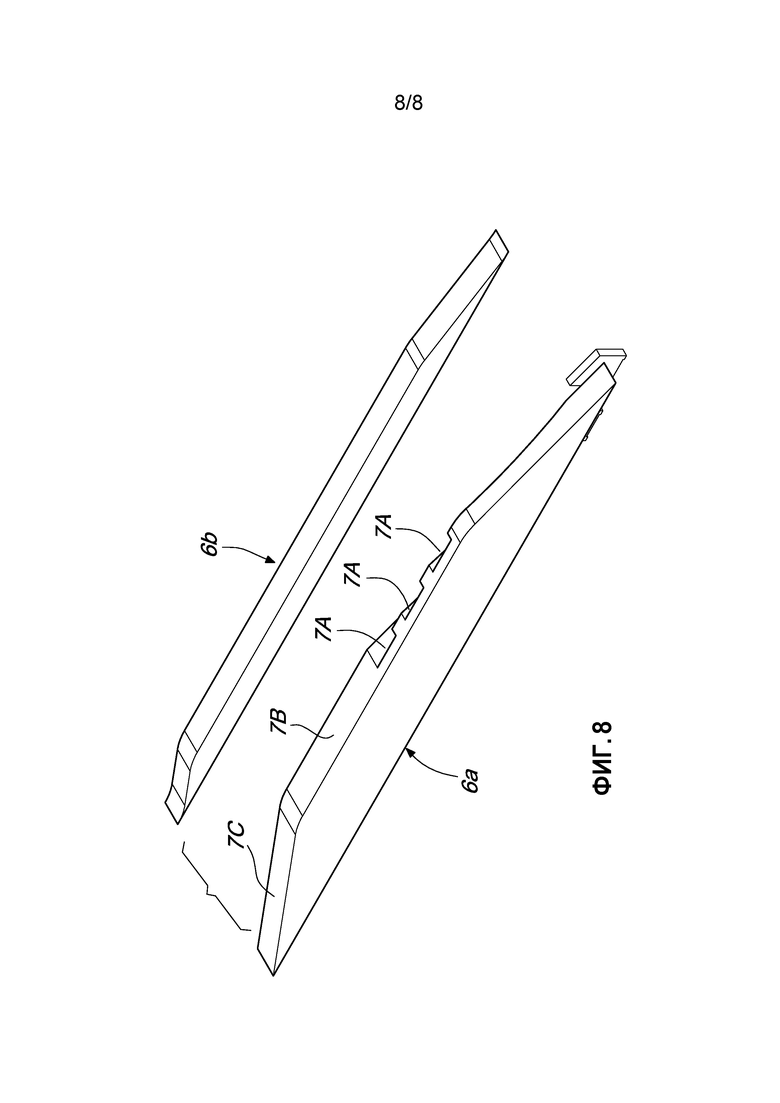
В частности для того, чтобы выполнять опрокидывание первых лотков 4a (и перемещение груш) на выбранном участке первой линии 3a, средства перемещения содержат по меньшей мере одну первую направляющую пластину 6a, которая находится в параллельном расположении и находится рядом с первой линией 3a на противоположной стороне относительно второй линии 3b.
Как можно ясно видеть, например, на фигуре 7, по меньшей мере вдоль боковой стенки первой пластины 6a, которая прямо обращена к первой линии 3a, имеется множество наклонных полос 7: после приведения в действие соответствующего исполнительного элемента, первый хвостовик 8a, которым снабжен каждый первый лоток 4a, может выборочно входить в зацепление с каждой полосой 7 с тем, чтобы вызывать поворот соответствующего первого лотка 4a в результате скольжения первого хвостовика 8a по полосе 7.
Поэтому, эффективно, каждая полоса 7 ведет себя, как кулачок, который придает конкретное движение первому хвостовику 8a, с которым она сцеплена, и, вследствие этого, вызывает поворот соответствующего первого лотка 4a, который составляет единое целое с первым хвостовиком 8a.
Более конкретно, каждый исполнительный элемент (на сопровождающих фигурах не показан из соображения простоты) содержит по меньшей мере один исполнительный механизм (который может быть стандартным), который составляет единое целое с соответствующим первым блоком 2a и который обычно обращен к первому хвостовику 8a. Каждый исполнительный механизм может выборочно приводиться в действие электронным блоком (при наступлении заданного состояния взаимного выравнивания или в моменты непосредственно ему предшествующие) для того, чтобы вызывать сцепление первого хвостовика 8a с соответствующей полосой 7, получая таким образом требуемый поворот первого лотка 4a, который переносит подлежащую перемещению грушу на вторую линию 3b.
В варианте осуществления, предложенном на сопровождающих фигурах в качестве неограничивающего примера, и с конкретной ссылкой на Фигуру 7, после зацепления первый хвостовик 8a следует в первый наклонный коридор 7A, затем проходит вдоль прямой задней стороны 7B первой пластины 6a, и в конце спускается по рампе 7C. Такое продвижение очевидно вызывает соответствующий поворот соответствующего первого лотка 4a, на котором закреплен первый хвостовик 8a.
Преимущественно, агрегат манипулирования 1 согласно изобретению содержит вторую направляющую пластину 6b, которая, в свою очередь, находится в параллельном расположении и рядом со второй линией 3b на противоположной стороне относительно первой линии 3a. В отличие от того, чтобы было видно для первой пластины 6a (которая может задерживать первые хвостовики 8a только после приведения в действие исполнительного элемента), вторая пластина 6b расположена по пути вторых хвостовиков 8b каждого второго лотка 4b.
Как можно видеть на сопровождающих фигурах, такой выбор вызывает поворот каждого второго лотка 4b (когда они достигают второй пластины 6b) по той причине, что соответствующий второй хвостовик 8b вынужден скользить по контурному проходу, образованному верхней частью второй пластины 6b.
Вследствие этого, вторая пластина 6b также ведет себя, как кулачок, но она придает такое же движение и такое же частичное опрокидывание (на том же участке второй линии 3b) всем вторым лоткам 4b.
Как можно видеть на сопровождающих фигурах, за счет целесообразного выбора длины направляющего устройства (равной полному протяжению первой пластины 6a, на которое влияют различные полосы 7), вторые лотки 4b удерживаются частично наклонными по всему сегменту второй линии 3b, в котором они потенциально могут принимать грушу.
Не исключая предоставления агрегатов 1, в которых вторая пластина 6b имеет полосы 7, аналогичные полосам, описанным для первой пластины 6a, для выборочного сцепления со вторыми хвостовиками 8b, выбор для придания такого же опрокидывания всем вторым лоткам 4b упрощает конструкцию (и стоимость) агрегата 1, в любом случае сохраняя при этом функциональность, описанную до сих пор.
Кроме того, следует заметить, что не исключена вероятность предложения на рынке агрегатов 1, которые также остаются в пределах объема защиты, заявленного в данном документе, и в которых вторые блоки 2b не подвергаются никакому повороту (и в которых, например, риск падения груш более просто предотвращать за счет боковых стенок, расположенных подходящим образом вдоль внешней стороны каждого второго лотка 4b).
Преимущественно, как можно видеть в частности на Фигурах 4 и 7, каждый лоток 4a, 4b (вследствие этого для каждой линии 3a, 3b) жестко поддерживается опорой 9a, 9b, которая поворачивается вокруг соответствующей главной оси к ползуну 10a, 10b, который может скользить вдоль соответствующего направляющего устройства 5a, 5b.
Вследствие этого, каждый хвостовик 8a, 8b продолжается от соответствующей опоры 9a, 9b на противоположной стороне относительно соответствующего лотка 4a, 4b.
Вследствие этого, для второй линии 3b, когда второй блок 2b поступает на вторую пластину 6b, соответствующий второй хвостовик 8b поднимается по верхней части последнего, и это вызывает поворот опоры 9b и второго лотка 4b.
И наоборот, в первой линии 3a первый хвостовик 8a (или по меньшей мере один из его концов) следует по одной из полос 7, только когда исполнительный механизм толкает его в эту полосу: за счет предоставления подходящего количества полос 7 таким образом можно образовывать множество участков (мест первой линии 3a), в которых происходит частичное опрокидывание каждого первого лотка 4a.
Работа агрегата манипулирования согласно изобретению происходит следующим образом.
Каждая груша (или другой плодоовощной продукт A) загружается на первый блок 2a первой линии 3a в первом расположении, которое в результате неправильной формы таких плодов является случайным и заранее не предсказуемым.
Таким образом, груши сначала перемещаются по первой линии 3a, где первая видеокамера может выявлять их цвет, форму и размер и/или проверять наличие дефектов поверхности на открытом участке или дефектов мякоти.
Кроме того, на этом этапе электронное средство просмотра, связанное с электронным блоком, запрашивает информацию о положении, принимаемом каждым плодоовощным продуктом A в соответствующем первом блоке 2a: предпочтительно, такая информация относится как к ориентации, в которой продукт A помещен на первом лотке 4a (первое расположение, упомянутое выше), так и к месту первого лотка 4a, в котором находится продукт A (относительно неподвижных ориентиров, таких как, например, его периметр или его центр). Вследствие этого, это позволяет электронному блоку рассчитывать участок первой линии 3a, где происходит перемещение (он выбирается в соответствии с возникновением заданного состояния взаимного выравнивания).
Для того, чтобы выполнять перемещение, электронный блок приводит в действие исполнительный механизм, связанный с первым блоком 2a, который переносит подлежащий перемещению продукт A; исполнительный механизм на самом деле толкает первый хвостовик 8a соответствующего первого лотка 4a в сторону первой пластины 6a, зацепляя первый хвостовик 8a с полосой, выбранной из нескольких полос 7. Таким образом, конкретное движение вдоль полосы 7 налагается на первый хвостовик 8a и в результате первый лоток 4a поворачивается, частично опрокидывая и перемещая грушу в сторону, где ее принимает второй блок 2b локализации.
Благодаря расчету, проводимому электронным блоком, можно помещать каждую грушу в центре соответствующего второго лотка 4b с тем, чтобы обеспечивать легкую процедуру взвешивания.
Кроме того, при опрокидывании, продукты А изменяют свою конфигурацию (ориентацию, в которой они находятся на втором блоке 2b), и, вследствие этого, они перемещаются по второй линии 3b во втором расположении, в котором они демонстрируют другой участок поверхности (по существу противоположный и дополняющий предыдущий) второй видеокамере, обеспечивая таким образом завершение проверки дефектов, цвета и категории размера.
Однако, следует отметить, что если первая видеокамера выявляет на груше серьезные дефекты, электронный блок может пропустить подачу команды перемещения, позволяя таким образом плодоовощному продукту A продолжать свой путь до конца первой линии 3a, где ему может быть позволено падение в контейнер для отбракованного материала. Или за счет использования дополнительных элементов типа направляющих пластин 6a, 6b, расположенных до и/или после линий 3a, 3b, агрегат 1 может иметь возможность выгрузки продуктов А по бокам линий 3a, 3b для того, чтобы отбраковывать их при выявлении серьезных дефектов и/или направлять их в обычно предоставляемые пункты переработки.
В отличие от того, что происходит с обычными системами, вследствие этого было полностью показано, что агрегат 1 согласно изобретению обеспечивает возможность точного определения места второго блока 2b локализации, в котором перемещается каждая груша, благодаря электронному блоку, способному выбирать точный момент, в котором приводить в действие исполнительный элемент для того, чтобы опрокидывать по меньшей мере первый лоток 4a: как было видно, выбранным моментом обычно является момент, соответствующий возникновению требуемого (заданного) состояния взаимного выравнивания.
Вследствие этого, такой результат получается даже при неправильности и своеобразности формы груш (как и любого другого плодоовощного продукта A), благодаря тому, что электронный блок и принятые средства перемещения в каждом случае обеспечивают возможность изменения участка, в котором выполнять перемещение, в качестве функции изменяемой неравномерности каждого продукта A и его конфигурации.
Во время транспортировки, в дополнение к проверке на дефекты и более общей проверке цвета и категории размера, агрегат 1 обеспечивает эффективное взвешивание каждой груши, благодаря способности управлять размещением по меньшей мере на второй линии 3b.
На практике было обнаружено, что агрегат манипулирования согласно изобретению полностью достигает установленной цели, благодаря тому, что средства перемещения, распределенные по меньшей мере вдоль одной части первой линии транспортировки и/или управления, приводятся в действие электронным блоком регулирования и управления только при наступлении заданного состояния взаимного выравнивания между плодоовощными продуктами, подлежащими перемещению, которые перемещаются первым блоком локализации, и второго блока локализации, и это обеспечивает возможность перемещения плодоовощной продукции между двумя линиями манипулирования, имея в то же время возможность управлять их размещением, по меньшей мере на выходе.
Изобретение, задуманное таким образом, может быть подвержено многочисленным модификациям и изменениям, которые все находятся в пределах объема правовых притязаний приложенной формулы изобретения. Кроме того, все детали могут быть заменены другими, технически эквивалентными элементами.
В проиллюстрированных вариантах осуществления, отдельные характеристики, показанные в связи с конкретными примерами, в реальности могут быть заменены другими, отличающимися характеристиками, существующими в других вариантах осуществления.
На практике, используемые материалы, а также размеры, могут быть любыми согласно требованиям и состоянию области техники.
Раскрытие патентной заявки Италии № BO2015A000148 (102015902341042), приоритет которой испрашивает эта заявка включено в данный документ посредством ссылки.
Когда технические признаки, упомянутые в каком-нибудь пункте, сопровождаются ссылочными обозначениями, эти ссылочные обозначения были включены с единственной целью повышения понятности пунктов и, соответственно, такие ссылочные обозначения не оказывают какого-либо ограничительного действия на интерпретацию каждого элемента, обозначенного в качестве примера такими ссылочными обозначениями.



Агрегат содержит первые блоки (2a) локализации плодоовощной продукции (A), которые могут двигаться по первой линии (3a) транспортировки и/или управления, и вторые блоки (2b) локализации фруктовых и овощных продуктов (A), которые могут двигаться по второй линии (3b) транспортировки и/или управления, которая параллельна первой линии (3a), причем линии (3а, 3b) двигаются с различными скоростями. Множество средств перемещения плодоовощных продуктов (A) действуют по меньшей мере вдоль части первой линии (3a) и являются выборочно приводимыми в действие электронным блоком регулирования и управления для перемещения каждого продукта (A) из первого блока (2a) в соответствующий второй блок (2b) на участке, выбранном из множества различных участков указанной первой линии (3a), при наступлении заданного состояния взаимного выравнивания между плодоовощным продуктом (A), подлежащим перемещению, который перемещается первым блоком (2a), и вторым блоком (2b). Обеспечивается возможность перемещения плодоовощной продукции между двумя линиями манипулирования с возможностью в то же время управлять их размещением. 9 з.п. ф-лы, 8 ил.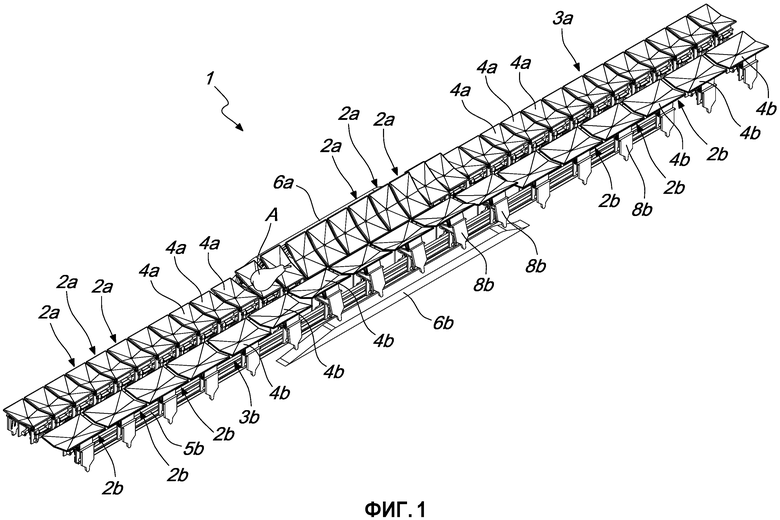
1. Агрегат для перемещения и управления фруктовыми и овощными продуктами, который содержит первые блоки (2a) локализации плодоовощной продукции (A), которые могут двигаться по первой линии (3a) транспортировки и/или управления, и вторые блоки (2b) локализации фруктовых и овощных продуктов (A), которые могут двигаться по второй линии (3b) транспортировки и/или управления, которая параллельна первой линии (3a), причем линии (3а, 3b) двигаются с различными скоростями, отличающийся тем, что он содержит множество средств перемещения плодоовощных продуктов (A), при этом указанные средства действуют по меньшей мере вдоль части первой линии (3a) и являются выборочно приводимыми в действие электронным блоком регулирования и управления для перемещения каждого продукта (A) из первого блока (2a) в соответствующий второй блок (2b) на участке, выбранном из множества различных участков указанной первой линии (3a), при наступлении заданного состояния взаимного выравнивания между плодоовощным продуктом (A), подлежащим перемещению, который перемещается первым блоком (2a), и вторым блоком (2b).
2. Агрегат для перемещения и управления по п. 1, отличающийся тем, что каждый из указанных вторых блоков (2b) локализации связан с соответствующим устройством для взвешивания перемещаемой плодоовощной продукции (A).
3. Агрегат для перемещения и управления по п. 1 или 2, отличающийся тем, что он содержит электронное устройство управления, снабженное первой видеокамерой, которая обращена на указанную первую линию (3a), для проверки цвета, размера и/или наличия дефектов поверхности и мякоти на указанных плодоовощных продуктах (A), которые поддерживаются и перемещаются указанными первыми блоками (2a) в первом расположении, и второй видеокамерой, которая обращена на указанную вторую линию (3b) для проверки цвета, размера и/или наличия дефектов поверхности и мякоти на указанных плодоовощных продуктах (A), которые поддерживаются и перемещаются указанными вторыми блоками (2b) во втором расположении, которое получается автоматически в результате перемещения продуктов (A) с указанной первой линии (3a) на указанную вторую линию (3b).
4. Агрегат для перемещения и управления по п. 3, отличающийся тем, что каждый из указанных первых блоков (2a) состоит по существу из первого лотка (4a), который может двигаться по первому направляющему устройству (5a), которое по существу образует указанную первую линию (3a), и может поворачиваться вокруг первой главной оси, которая по существу параллельна указанному первому направляющему устройству (5a), причем указанные средства перемещения содержат элементы для запуска поворота соответствующих указанных первых лотков (4a) вокруг указанной первой главной оси для их частичного опрокидывания и последующего перемещения соответствующего плодоовощного продукта (A) в сторону соответствующего указанного второго блока (2b), после чего такой опрокинутый плодоовощной продукт (A) автоматически переходит из указанного первого расположения в указанное второе расположение.
5. Агрегат для перемещения и управления по п. 4 или 5, отличающийся тем, что каждый из указанных вторых блоков (2b) локализации состоит по существу из второго лотка (4b), который может двигаться вдоль второго направляющего устройства (5b), которое по существу образует указанную вторую линию (3b), и имеет форму и размеры, которые необязательно отличаются от формы и размеров указанного первого лотка (4a), причем каждый из указанных вторых лотков (4b) может поворачиваться вокруг второй главной оси, которая по существу параллельна указанной первой главной оси и указанному второму направляющему устройству (5b), для их частичного опрокидывания в противоположном направлении относительно частичного опрокидывания указанных первых лотков (4a) по меньшей мере во время перемещения соответствующего плодоовощного продукта (A).
6. Агрегат для перемещения и управления по одному или более предшествующим пунктам, отличающийся тем, что указанные средства перемещения содержат по меньшей мере одну первую направляющую пластину (6a), которая находится в параллельном расположении и находится рядом с указанной первой линией (3a) на противоположной стороне относительно указанной второй линии (3b), при этом по меньшей мере вдоль боковой стенки указанной первой пластины (6a), которая обращена к указанной первой линии (3a), имеется множество наклонных полос (7), причем первый хвостовик (8a) каждого из указанных первых лотков (4a) может выборочно входить в зацепление после приведения в действие соответствующего указанного исполнительного элемента с каждой из указанных полос (7) для поворота соответствующего указанного первого лотка (4a) в результате скольжения указанного первого хвостовика (8a) вдоль указанной полосы (7).
7. Агрегат для перемещения и управления по одному или более предшествующим пунктам, отличающийся тем, что каждый из указанных исполнительных элементов содержит по меньшей мере один исполнительный механизм, который составляет единое целое с соответствующим указанным первым блоком (2a) и обычно обращен к указанному первому хвостовику (8a), причем каждый из указанных исполнительных механизмов является выборочно приводимым в действие указанным электронным блоком для того, чтобы вызывать зацепление указанного первого хвостовика (8a) с соответствующей указанной полосой (7).
8. Агрегат для перемещения и управления по одному или более предшествующим пунктам, отличающийся тем, что он содержит вторую направляющую пластину (6b), которая находится в параллельном расположении и рядом с указанной второй линией (3b) с противоположной стороны относительно указанной первой линии (3a) и расположена вдоль пути вторых хвостовиков (8b) каждого из указанных вторых лотков (4b) для их поворота в результате скольжения указанных вторых хвостовиков (8b) по контурному проходу, образованному верхней частью указанной второй пластины (6b).
10. Агрегат для перемещения и управления по одному или более предшествующим пунктам, отличающийся тем, что каждый из указанных лотков (4a, 4b) жестко поддерживается опорой (9a, 9b), которая поворачивается вокруг соответствующей указанной главной оси к ползуну (10a, 10b), который может скользить по соответствующему указанному направляющему устройству (5a, 5b), причем каждый из указанных хвостовиков (8a, 8b) продолжается от соответствующей указанной опоры (9a, 9b) с противоположной стороны относительно соответствующего указанного лотка (4a, 4b).
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Установка для испытания образцов материалов на изгиб | 1987 |
|
SU1469301A1 |
| GB 2174353 A, 05.11.1986 | |||
| US 5174429 A, 29.12.1992. | |||

