Настоящее изобретение относится к гибридной системе транспортировки предметов.
В патенте ЕР 0633208 описан способ сортировки предметов, в котором множество предметов, имеющих разные адреса сортировки, сортируют с использованием множества высокоэффективных кареток, выполненных с возможностью перемещения вдоль направляющей. Каждая такая каретка имеет четыре конвейерные ленты, движущиеся в противоположных направлениях подачи и, кроме того, выполненные с возможностью синхронной работы. Предметы могут быть поданы на каретку или сняты с нее при помощи конвейерных лент, расположенных на противоположных сторонах каретки.
Вышеупомянутая каретка выполнена с возможностью перемещения предметов малых размеров, которые могут быть помещены на соответствующую конвейерную ленту или на пару соседних лент.
Цель настоящего изобретения состоит в создании системы транспортировки, являющейся особенно гибкой и обеспечивающей транспортировку потока предметов различных размеров с высокой производительностью.
Упомянутая выше цель достигается посредством настоящего изобретения, поскольку оно относится к системе транспортировки предметов, в которой состав, образованный множеством кареток, соединенных последовательно друг с другом посредством шарнирных соединений, выполнен с возможностью перемещения вдоль направляющей посредством приводных средств, причем указанный состав содержит первые каретки, чередующиеся со вторыми каретками, при этом указанная система отличается тем, что каждая первая каретка содержит опорную конструкцию, на которой установлена пара первых прямолинейных конвейерных лент с моторным приводом, расположенных так, что их более длинные кромки взаимно параллельны и перпендикулярны направлению подачи состава, причем каждая первая конвейерная лента образует обращенную вверх плоскую прямоугольную опорную поверхность, выполненную с возможностью помещения на нее по меньшей мере одного предмета, при этом соседние кромки упомянутых конвейерных лент отстоят друг от друга на расстоянии d, и каждая вторая каретка содержит опорную конструкцию, на которой установлена только одна вторая прямолинейная конвейерная лента с моторным приводом, расположенная так, что ее более длинные кромки перпендикулярны направлению подачи состава.
Настоящее изобретение описано далее со ссылками на сопроводительные чертежи, на которых проиллюстрирован предпочтительный неограничительный вариант выполнения изобретения и на которых
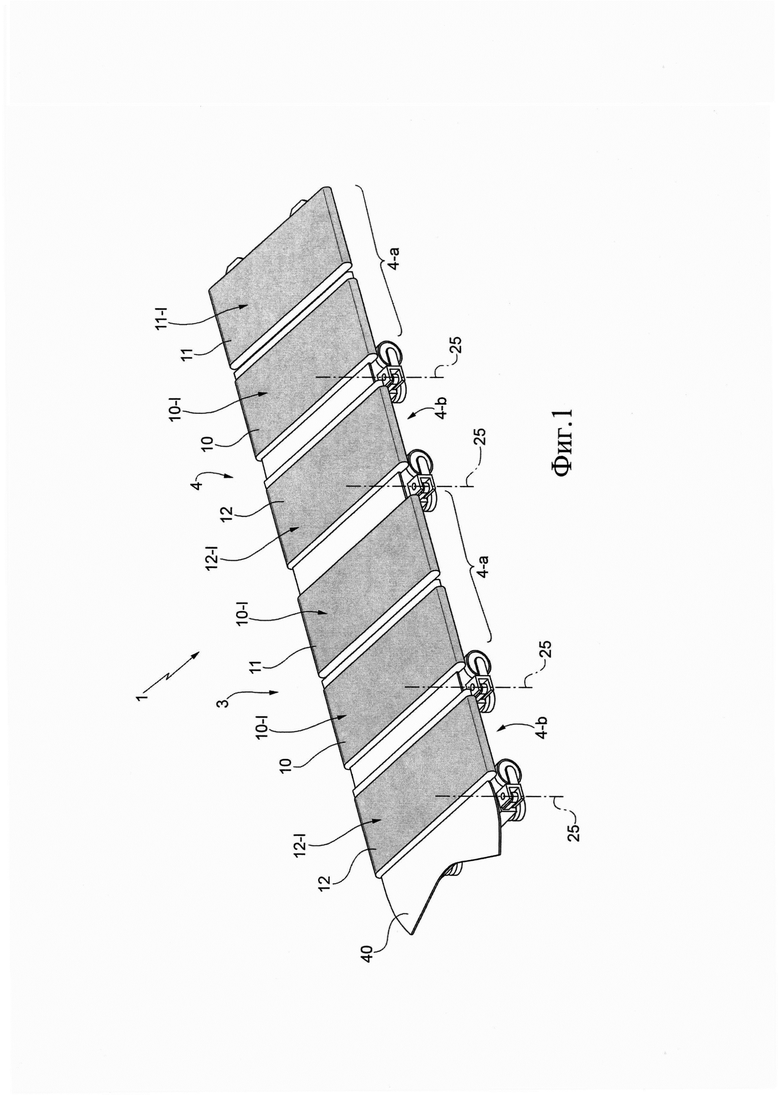
на фиг. 1 изображен вид сверху в аксонометрии системы транспортировки предметов, выполненной в соответствии с настоящим изобретением,
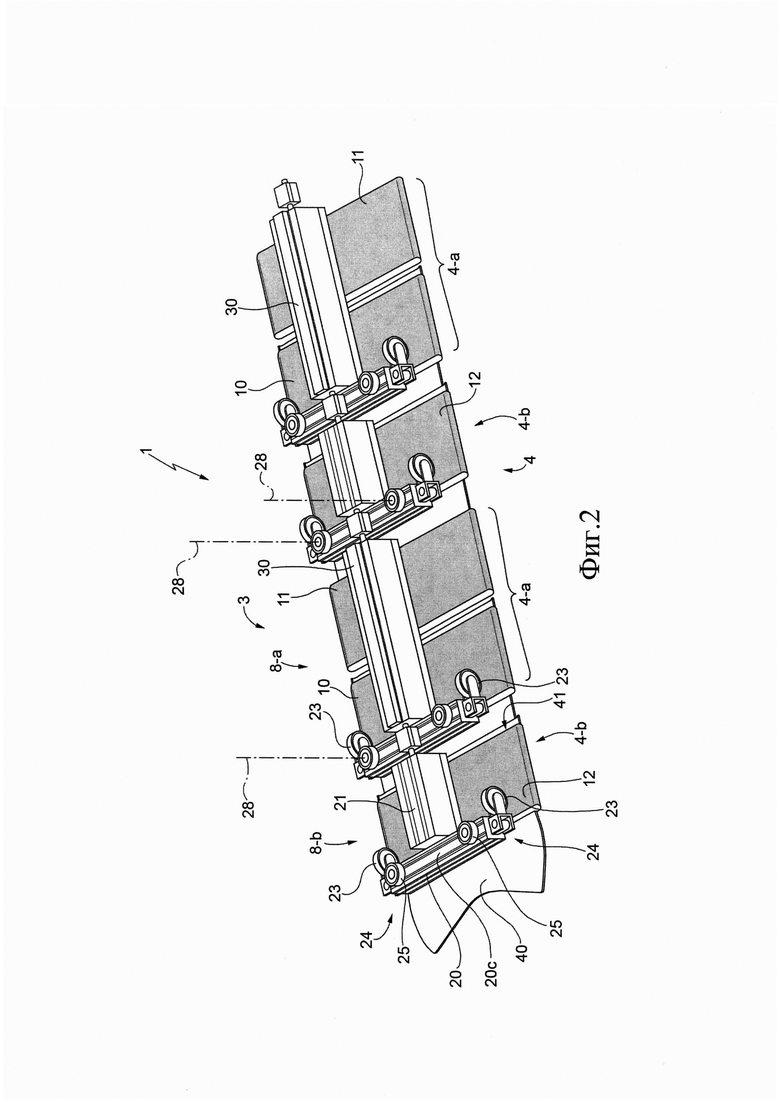
на фиг. 2 изображен вид снизу в аксонометрии системы транспортировки предметов, выполненной в соответствии с настоящим изобретением,
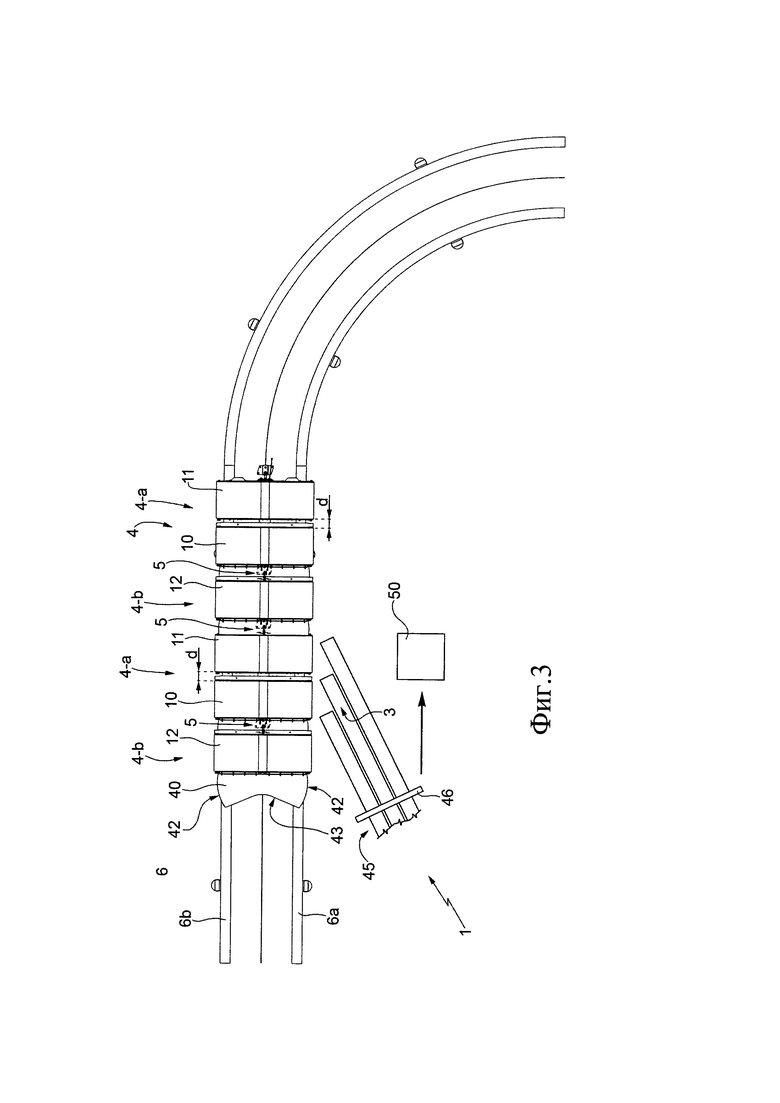
на фиг. 3 изображен вид сверху системы, показанной на фиг. 1 и 2, в первом рабочем положении (при движении вдоль прямолинейного участка направляющей),
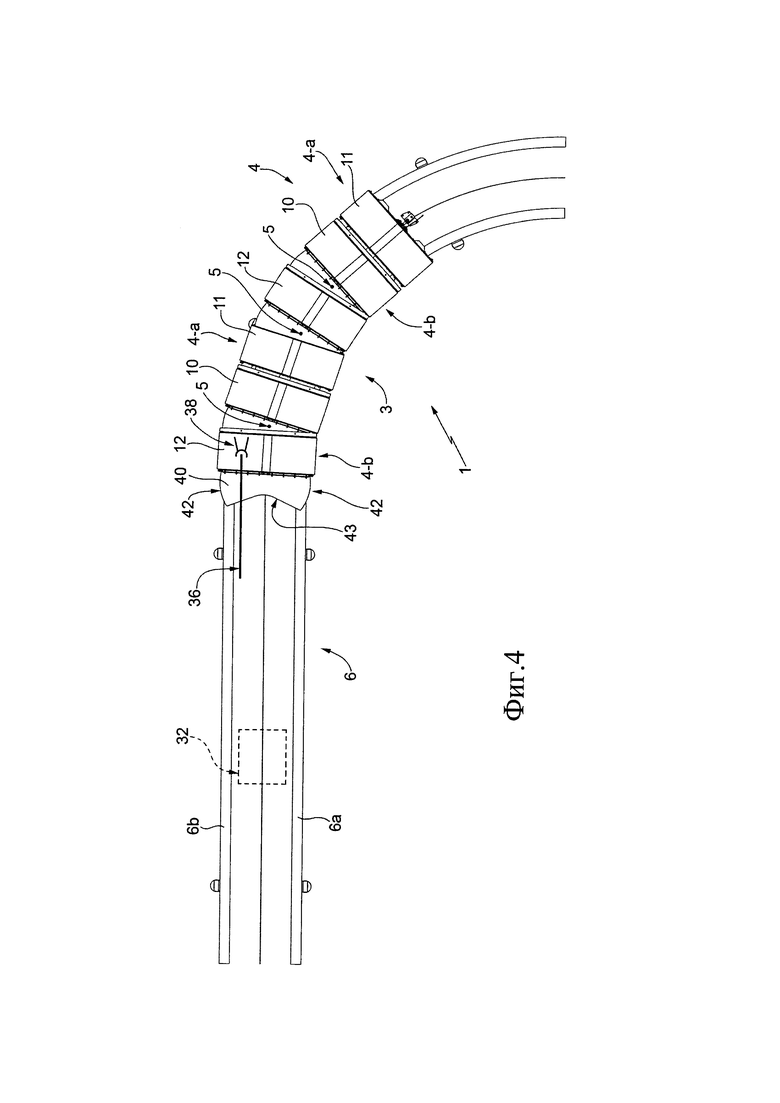
на фиг. 4 изображен вид сверху системы, показанной на фиг. 1 и 2, во втором рабочем положении (при движении вдоль криволинейного участка направляющей), и
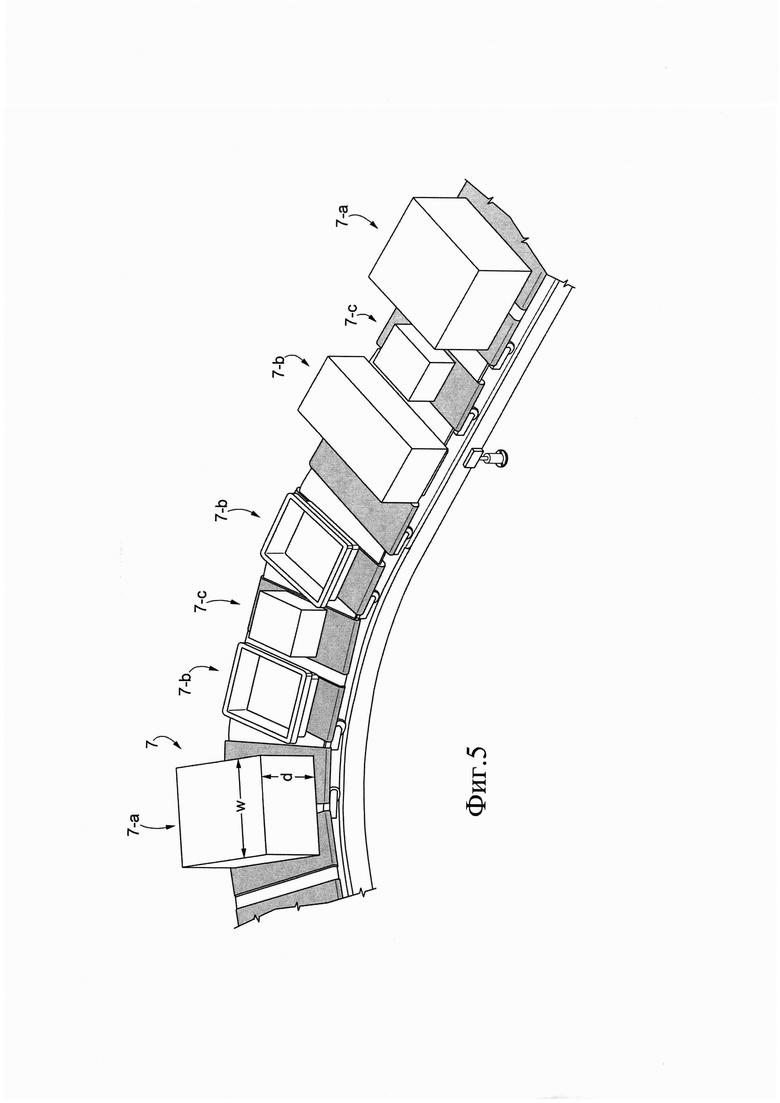
на фиг. 5 показано состояние движения во время использования системы транспортировки в соответствии с настоящим изобретением.
На сопроводительных чертежах цифрой 1 обозначена в целом система транспортировки предметов 7, в которой состав 3, образованный множеством кареток 4, соединенных последовательно друг с другом шарнирными соединениями 5, движется вдоль пути, образованного направляющей 6 с линейным приводом (проиллюстрированным далее). Обычно, но не исключительно, путь является замкнутым и проходит в одной плоскости.
Транспортируемые предметы 7 обычно содержат пакеты в форме параллелепипеда, определяемой тремя характеристическими размерами: длиной L, шириной W и высотой Н. В качестве неограничительного примера, указанные характеристические параметры пакетов 7 могут быть следующими:
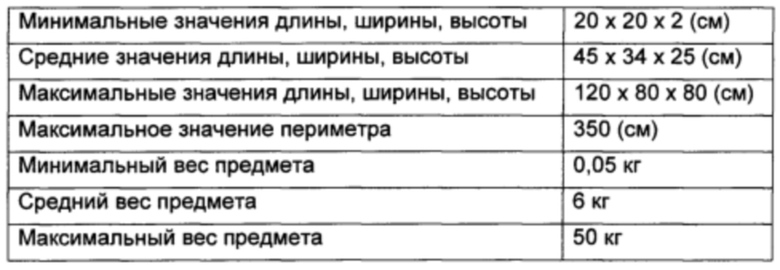
Другими типами обычно транспортируемых предметов являются поддоны, образованные чашеобразным телом, имеющим в плане прямоугольный периметр.
Состав содержит первые каретки 4-а, чередующиеся со вторыми каретками 4-b. В примере проиллюстрированы две первые каретки 4-а и две вторые каретки 4-b, но очевидно, что количество кареток может быть различным.
В соответствии с настоящим изобретением, каждая первая каретка 4-а содержит опорную конструкцию 8-а, на которой установлена пара первых прямолинейных конвейерных лент 10, 11 с моторным приводом, расположенных так, что их более длинные кромки взаимно параллельны и перпендикулярны направлению D подачи состава 3. Каждая первая конвейерная лента 10, 11 образует обращенную вверх плоскую прямоугольную опорную поверхность 10-1, 11-1, на которую может быть помещен по меньшей мере один предмет (см. фиг. 5). Соседние прямолинейные кромки конвейерных лент 10, 11 отстоят друг от друга на расстояние d, которое в неограничительном примере может составлять 100 мм.
Каждая вторая каретка 4-b содержит опорную конструкцию 8-b, на которой установлена только одна вторая прямолинейная конвейерная лента 12 с моторным приводом, расположенная так, что ее более длинные кромки перпендикулярны направлению D подачи состава 3. Вторая конвейерная лента 12 образует обращенную вверх плоскую прямоугольную опорную поверхность 12-1, на которую может быть помещен по меньшей мере один предмет 7. Расстояние D между одной кромкой конвейерной ленты 11 первой каретки 4-а и обращенной к ней кромкой второй конвейерной ленты 12 второй каретки 4-b больше, чем расстояние d, например D=185 мм > d=100 мм.
Обычно, но не исключительно, первые конвейерные ленты 10, 11 и вторые конвейерные ленты 12 имеют одинаковую ширину (например, 460 мм), и прямоугольные опорные поверхности 10-1, 11-1, 12-1, образуемые первыми конвейерными лентами 10, 11 и вторыми конвейерными лентами 12, имеют одинаковую длину (в данном примере 700 мм). Опорные поверхности 10-1, 11-1, 12-1, образуемые первыми конвейерными лентами 10, 11 и вторыми конвейерными лентами 12, находятся в одной плоскости друг с другом на пленарных участках пути кареток.
Первые конвейерные ленты 10, 11 выполнены с моторным приводом с возможностью приведения в движение независимо друг от друга посредством соответствующих двигателей (не показаны для упрощения чертежа). В частности, каждая конвейерная лента 10, 11 проходит между первым неприводным роликом, установленным на первой концевой части опорной конструкции 8-а, и вторым роликом, снабженным моторным приводом и установленным на второй концевой части опорной конструкции 8-а. Аналогично, конвейерная лента 12 проходит между первым неприводным роликом, установленным на первой концевой части опорной конструкции 8-b, и вторым роликом, снабженным моторным приводом и установленным на второй концевой части опорной конструкции 8-b.
Как показано на фиг. 2, каждая опорная конструкция 8-а, 8-b является Т-образной и содержит прямолинейный поперечный элемент 20 и прямолинейный вертикальный элемент 21, проходящий от центральной части 20-с поперечного элемента 20. Вертикальные элементы 21 первых кареток 4-а имеют длину, по существу равную удвоенной длине вертикальных элементов 21 кареток 4-b, в то время как длина поперечных элементов 20 для кареток 4-а и 4-b одинакова.
Как правило, вертикальные элементы 21 и поперечные элементы 20 выполнены из легкого металла, такого как алюминий или алюминиевые сплавы.
Каждая каретка 4-а, 4-b содержит пару неприводных колес 23, установленных на соответствующих С-образных опорах 24, которые, в свою очередь, установлены на противоположных концевых частях прямолинейного поперечного элемента 20. Неприводные колеса 23 предназначены для размещения их на плоских верхних частях соответствующих направляющих 6-а, 6-b. Между концевой частью поперечного элемента 20 и опорой находятся подшипники (не показаны для упрощения чертежа), так что каждая опора 24 может поворачиваться вокруг соответствующей вертикальной оси 25, перпендикулярной поперечному элементу 20. Таким образом, неприводные колеса 23 могут быть ориентированы по отношению к опорной конструкции, чтобы следовать профилю направляющей.
Каждая каретка 4-а, 4-b содержит пару дополнительных неприводных колес 25, установленных на поперечном элементе с противоположных сторон относительно центральной области 20 с. При этом колеса 25 выполнены с возможностью вращения вокруг соответствующих осей 28, перпендикулярных поперечному элементу 20, и взаимодействия с внутренними частями направляющих 6-а, 6-b для центрирования кареток 4-а, 4-b относительно самих направляющих 6-а, 6-b. Дополнительные колеса 25 покрыты резиной, предназначенной для создания заметного трения на внутренних частях направляющих 6-а, 6-b.
Вышеупомянутый вертикальный элемент 21 имеет в концевой части первое соединительное устройство (не показано), выполненное с возможностью соединения со вторым соединительным устройством (не показано), расположенным в центральной части поперечного элемента 20 соседней каретки, для образования шарнирного соединения 5. Таким образом, первая каретка 4-а и вторая каретка 4-b, соединенные вместе, образуют группу кареток, которая размещена четырьмя колесами 23 на направляющих 6-а, 6-b.
На вертикальным элементе 21 установлен плоский прямоугольный прямолинейный магнит 30, обращенный к направляющим 6. Очевидно, что длина магнита 30, установленного на каретках 4-а, больше (в частности, в два раза) длины магнита, установленного на каретке 4-b.
Прямолинейный магнит 30 образует подвижный элемент линейного привода, имеющего статор 32, содержащий электромагнит, расположенный между направляющими 6-а, 6-b. В любом случае, технология изготовления линейных приводов известна и не будет описываться далее.
Кроме того, имеется система 34 передачи энергии типа электромагнитного преобразователя между изолированной шиной 36 питания, проходящей вдоль направляющей 6 и представляющей первичную часть преобразователя, и Сообразным коллектором 38, проходящим от корпуса 8-а, 8-b к шине 36 питания и представляющим вторичную часть преобразователя.
Каждая каретка 4-а, 4-b имеет гибкую плоскую стенку 40, которая проходит горизонтально, т.е. проходит от передней части каретки 4-а, 4-b, взаимодействуя с канавкой 41 задней части соседней каретки 4-b, 4-а. Таким образом, указанная стенки расположена так, что она закрывает промежуток, имеющийся между двумя соседними каретками 4-а, 4-b.
Гибкая плоская стенка 40 предотвращает возможное попадание мелкого предмета 7 в промежуток между двумя соседними каретками 4-а, 4-b.
Гибкая плоская стенка 40 выполнена из пластического материала, лежит в плоскости, параллельной плоскости опорных поверхностей 10-1, 11-1, 12-1, и ограничена с боковых сторон двумя криволинейными боковыми кромками 42 и U-образной передней кромкой 43.
Во время движения кареток 4-а и 4-b вдоль прямолинейного участка, расстояние между каждой кареткой и соседней кареткой остается постоянным (фиг. 3). Когда состав изгибается (фиг. 4b), каретки поворачиваются по отношению друг к другу вокруг шарнирных соединений 5, повторяя изгиб направляющих 6. Соседние кромки кареток 4-а, 4-b, обращенные к внутренней стороне изгиба, сближаются друг с другом без соприкосновения, в то время как соседние кромки кареток 4-а, 4-b, обращенные к наружной стороне изгиба, отдаляются друг от друга. Расстояние D, по существу, выбрано таким, чтобы предотвратить контакт между соседними кромками кареток, обращенными к внутренней стороне изгиба.
В системе 1 предусмотрена по меньшей мере одна линия 45 подачи для подачи предметов на каретки 4-а, 4-b. Например, линия подачи содержит множество взаимно параллельных конвейерных лент, параллельных направлению подачи и установленных под углом к прямолинейному участку направляющей 6.
Линия 45 подачи имеет портал 46, оборудованный оптическими устройствами известного типа для измерения размеров предметов 7, продвигающихся вдоль линии подачи.
Упомянутые оптические устройства работают совместно с электронным блоком управления линии подачи, который предназначен для обнаружения:
a) громоздких почтовых предметов, которые имеют по меньшей мере один размер L, W или Н, превышающий пороговое значение, при этом указанные предметы почтовых отправлений могут быть погружены только в пределах периметра, ограниченного парой конвейерных лент 10, 11;
b) почтовых предметов с размерами больше средних, ширина L которых превышает ширину конвейерной ленты 10, 11; и
c) стандартных почтовых предметов, которые имеют размеры L, W, Н, содержащиеся в пределах пороговых значений.
Электронный блок 50 управления выполнен с возможностью выбора первой каретки 4-а для передачи громоздкого предмета с линии 45 подачи на первые конвейерные ленты 10, 11. Таким образом, основание громоздкого предмета 7 помещают на конвейерные ленты 10, 11. Таким образом, обеспечивается позиционирование громоздкого предмета 7 на каретке 4-а, имеющей такие размеры, которые обеспечивают предотвращение контакта между стенками громоздкого предмета и стенками предметов почтовых отправлений, переносимых соседними каретками. Электронный блок 50 управления запрещает размещение следующего громоздкого предмета или предмета с размерами выше среднего на каретке 4-b, расположенной по соседству с ранее выбранной кареткой, чтобы предотвратить возможные столкновения предметов и оптимизировать обнаружение кодов, в частности штрихкодов, нанесенных на предметы. Эта конфигурация обеспечивает размещение даже больших пакетов на парах конвейерных лент одной каретки, в результате чего улучшается управление, когда система делает изгиб (благодаря отсутствию скольжения основания по конвейерным лентам, которое имело бы место, если бы большой пакет был погружен на две каретки).
В случае, когда идентифицирован предмет с размерами выше средних, он предпочтительно, но не исключительно, грузится на каретку 4-а.
Устройство 1 позволяет эффективно транспортировать разные категории предметов 7. В частности, чередование кареток с различным числом конвейерных лент (две - одна) дает возможность гибкости при использовании, что значительно увеличивает общую эффективность работы системы транспортировки. Большие предметы фактически могут быть погружены на каретки 4-а, в то время как предметы средних размеров могут быть погружены либо на каретки 4-а, либо на каретки 4-b.
Особое преимущество устройства описанной конструкции состоит в том, что повышается производительность транспортировки, когда количество предметов с размерами выше средних велико по сравнению с количеством малогабаритных предметов, при том что обеспечивается возможность погрузки малогабаритных предметов на каждое оставшееся свободное место. Такая конфигурация позволяет помещать предметы средних размеров на каждую отдельную доступную каретку и/или на каждую доступную конвейерной ленту из двух имеющихся на каретке, даже если одна из двух конвейерных лент уже занята малогабаритным предметом.
Cостав (3), образованный множеством кареток (4), выполнен с возможностью движения вдоль направляющей (6) и перемещения предметов, например пакетов (7). Состав содержит первые каретки (4-а), каждая из которых имеет пару первых прямолинейных конвейерных лент (10, 11) с моторным приводом, расположенных так, что их более длинные кромки взаимно параллельны и перпендикулярны направлению (D) подачи состава. Первые каретки чередуются со вторыми каретками (4-b), каждая из которых имеет только одну вторую прямолинейную конвейерную ленту (12), расположенную так, что ее более длинные кромки перпендикулярны направлению (D) подачи состава (3). Расстояние D между кромкой первой конвейерной ленты (11) первой каретки (4-а) и обращенной к ней кромкой второй конвейерной ленты (12) второй каретки (4-b) больше, чем расстояние d между обращенными друг к другу кромками конвейерных лент (10, 11) первой каретки. Обеспечивается гибкая и высокопроизводительная система транспортировки объектов. 14 з.п. ф-лы, 5 ил.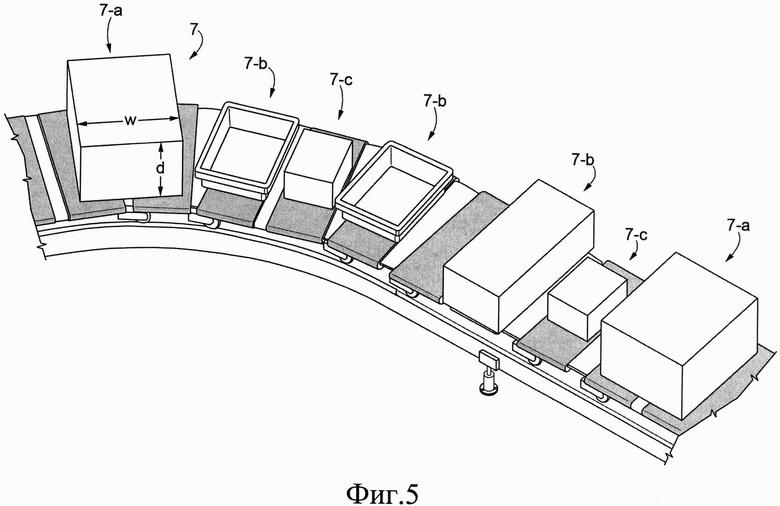
1. Система транспортировки предметов, в которой состав (3), образованный множеством кареток (4), соединенных последовательно друг с другом посредством шарнирных соединений (5), выполнен с возможностью перемещения вдоль пути (6) посредством приводных средств, причем указанный состав содержит первые каретки (4-а), чередующиеся со вторыми каретками (4-b),
отличающаяся тем, что:
каждая первая каретка (4-а) содержит опорную конструкцию (8-а), на которой установлена пара первых прямолинейных конвейерных лент (10, 11) с моторным приводом, расположенных так, что их более длинные кромки взаимно параллельны и перпендикулярны направлению (D) подачи состава, причем каждая первая конвейерная лента (10, 11) образует обращенную вверх плоскую прямоугольную опорную поверхность (10-1, 11-1), выполненную с возможностью помещения на нее по меньшей мере одного предмета (7), при этом соседние кромки упомянутых конвейерных лент (10, 11) отстоят друг от друга на первое расстояние d, и
каждая вторая каретка (4-b) содержит опорную конструкцию (8-b), на которой установлена только одна вторая прямолинейная конвейерная лента (12) с моторным приводом, расположенная так, что ее более длинные кромки перпендикулярны направлению (D) подачи состава (3), причем упомянутая вторая конвейерная лента (12) образует обращенную вверх плоскую прямоугольную опорную поверхность (12-1), выполненную с возможностью помещения на нее по меньшей мере одного предмета.
2. Система по п. 1, в которой расстояние D между кромкой одной первой конвейерной ленты (11) первой каретки (4-а) и обращенной к ней кромкой второй конвейерной ленты (12) второй каретки (4-b) больше, чем расстояние d.
3. Система по п. 1, в которой упомянутые первые конвейерные ленты (10, 11) и упомянутые вторые конвейерные ленты (12) имеют одинаковую ширину, и опорные поверхности (10-1, 11-1, 12-1), образованные первыми конвейерными лентами (10, 11) и вторыми конвейерными лентами (12), имеют одинаковую длину.
4. Система по п. 1, в которой опорные поверхности (10-1, 11-1, 12-1), образованные первыми конвейерными лентами (10, 11) и вторыми конвейерными лентами (12), находятся в одной плоскости друг с другом на планарных участках указанного пути.
5. Система по п. 1, в которой упомянутые первые конвейерные ленты (10, 11) выполнены с моторным приводом с возможностью приведения в движение независимо друг от друга посредством соответствующих двигателей.
6. Система по п. 1, в которой каждая первая/вторая конвейерная лента (10, 11, 12) проходит между парой роликов с моторным приводом, один из которых является приводным роликом и которые установлены на противоположных концевых частях упомянутой опорной конструкции (8-а, 8-b).
7. Система по п. 1, в которой каждая опорная конструкция (8-а, 8-b) имеет Т-образную форму и содержит прямолинейный поперечный элемент (20) и прямолинейный вертикальный элемент (21), проходящий от центральной части (20-с) поперечного элемента (20), причем каждая каретка (4-а, 4-b) содержит пару неприводных колес (23), установленных на соответствующих опорах (24), которые, в свою очередь, установлены на концевых частях прямолинейного поперечного элемента (20) и предназначены для размещения их на верхних частях соответствующих направляющих (6-а, 6-b), образующих упомянутый путь, при этом каждая опора (24) выполнена с возможностью поворота вокруг соответствующей оси, перпендикулярной указанному поперечному элементу,
причем каждая каретка (4-а, 4-b) содержит пару дополнительных неприводных колес (25), установленных на поперечном элементе с противоположных сторон относительно центральной области (20-с), при этом указанные колеса (25) выполнены с возможностью вращения вокруг соответствующих осей (28), перпендикулярных поперечному элементу (20), и вхождения в контакт с внутренними частями направляющих (6-а, 6-b) для центрирования каретки относительно самих направляющих, причем в концевой части упомянутого вертикального элемента (21) имеется первое соединительное средство, выполненное с возможностью соединения со вторым соединительным средством, расположенным в центральной области поперечного элемента (20) соседней каретки, для образования упомянутого шарнирного соединения.
8. Система по п. 7, в которой на упомянутом вертикальном элементе (21) установлен удлиненный прямолинейный плоский магнит (30), обращенный к направляющим (6-а, 6-b) и образующий подвижный элемент линейного привода, имеющего статор (32), содержащий электромагнит, расположенный между указанными направляющими.
9. Система по п. 1, содержащая систему передачи энергии типа электромагнитного преобразователя между изолированной шиной (36) питания, проходящей вдоль упомянутого пути (6) и представляющей первичную часть указанного преобразователя, и коллектором (38), проходящим от упомянутого корпуса (8-а, 8-b) к упомянутой шине (36) питания и представляющим вторичную часть указанного преобразователя.
10. Система по п. 2, в которой упомянутые первые конвейерные ленты (10, 11) и упомянутые вторые конвейерные ленты (12) имеют ширину около 460 мм, а прямоугольные опорные поверхности, образуемые первыми конвейерными лентами (10, 11) и вторыми конвейерными лентами (12), имеют длину около 700 мм, причем упомянутое расстояние d составляет около 100 мм, а упомянутое расстояние D составляет около 185 мм.
11. Система по п. 1, в которой каждая каретка (4-а, 4-b) имеет гибкую плоскую стенку (40), проходящую горизонтально от передней части каретки (4-а, 4-b), взаимодействующую с канавкой (41) задней части соседней каретки (4-а, 4-b) и расположенную так, что она закрывает промежуток между двумя соседними каретками (4-а, 4-b), при этом упомянутая гибкая плоская стенка (40) предотвращает возможное попадание предмета в промежуток между двумя соседними каретками.
12. Система по п. 11, в которой упомянутая плоская стенка ограничена с боковых сторон двумя криволинейными боковыми кромками (42) и U-образной передней кромкой (43).
13. Система по п. 1, содержащая по меньшей мере одну линию (45) подачи для подачи предметов к указанным кареткам (4-а, 4-b), причем указанная линия (45) подачи имеет устройство (46) для измерения характеристических размеров (L, W, Н) предметов (7), выполненное с возможностью распознавания по меньшей мере одного из следующих предметов:
а) громоздких предметов, по меньшей мере один размер L, W, Н которых превышает пороговое значение, при этом указанные предметы могут быть погружены только в пределах периметра, ограниченного парой первых конвейерных лент (10, 11),
b) почтовых предметов с размерами больше средних, ширина L которых превышает ширину первых конвейерных лент (10, 11),
c) стандартных почтовых предметов, размеры L, W, Н которых находятся в пределах пороговых значений,
причем указанная система содержит средство (50) управления, выполненное с возможностью выбора первой каретки (4-а) для транспортировки громоздкого предмета (а) от линии (45) подачи к первым конвейерным лентам (10, 11), на которые помещается основание указанного громоздкого предмета, и запрета установки следующего громоздкого предмета на каретку, являющуюся соседней по отношению к ранее выбранной каретке, для предотвращения возможных столкновений между предметами и оптимизации обнаружения кодов, в частности штрихкодов, нанесенных на предметы.
14. Система по п. 13, в которой упомянутое средство (50) управления выполнено с обеспечением загрузки предмета с размерами больше средних предпочтительно, но не исключительно, на первую каретку (4-а).
15. Система по п. 1, в которой указанный путь образован направляющей.
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| JP 2001225945 A, 21.08.2001 | |||
| US 4712965 A1, 15.12.1987 | |||
| EP 0633208 A1, 11.01.1995. | |||

