Изобретение относится к области радиолокации и может быть использовано в системах вторичной радиолокации при определении координат цели в системе «запрос-ответ».
Из уровня техники известны различные способы определения координат цели. Одним из способов является обзор окружающего пространства лучом радиолокатора, имеющим форму иглы, фиксация отраженных сигналов и определение координат цели по факту наличия отраженного сигнала, как текущего направления луча в пространстве и дальности до цели, пропорциональной задержке прихода отраженного от цели сигнала. Недостатком этого способа является сложность антенной системы, формирующей луч радиолокатора в форме иглы, и большая мощность передатчика радиолокатора, так как способ относится к системам первичной (пассивной) радиолокации.
Другим способом является определение координат самой целью с помощью оборудования цели и передача координат запрашивающему объекту. Недостатком этого способа является низкая помехоустойчивость си-системы «запросчик - ответчик».
Наиболее близким к предлагаемому техническому решению является изобретение «Способ и система для определения координат цели в системе запрос-ответ» (патент US №6,933,879, опубликовано 23.08.2005 г., МПК: G01S 13/78, G01S 13/75, G01S 13/06), которое выбрано в качестве прототипа. Для определения координат цели используют следующие параметры: высота цели, сообщаемая целью, высота носителя, на котором расположена система для определения координат цели в системе запрос-ответ, сообщаемая навигационной системой носителя и значение разницы между направлением на цель и направлением прицеливания антенны. Посредством математических соотношений определяют сферу с радиусом, равным измеренной дальности до объекта (сфера равной дальности); плоскость в нормальной системе координат (НСК) по ГОСТ 20058-80, параллельную плоскости XOZ НСК, и расположенную на высоте цели (плоскость высоты цели); вертикальную (перпендикулярную плоскости XOZ НСК) плоскость, содержащую круг С1 и линию направления на отвечающую цель (плоскость азимутального пеленга на цель).
С помощью решения системы уравнений, составленной с использованием вышеуказанных математических соотношений, определяются точки пересечения сферы и двух плоскостей, являющиеся возможными местоположениями цели. Далее из двух точек по критериям, определяемым углом направления антенны на цель и углом отклонения направления на цель от направления антенны на цель, отбирается точка, являющаяся местоположением цели.
Недостатком способа и системы определения координат цели в системе «запрос-ответ» является возможность безошибочного определения координат цели только в том случае, когда направление оси Y НСК (в которой задается математическое соотношение для плоскости высоты цели и математическое соотношение для сферы равной дальности) совпадает с направлением оси Y локальной системы координат (ЛСК) антенны (т.е. системы координат, в которой измеряется отклонение на цель от направления антенны, и задается плоскость азимутального пеленга на цель). ЛСК антенны может совпадать со связанной системой координат (ССК, по ГОСТ 20058-80) - при неподвижной относительно носителя антенне, либо быть собственной, отличной от связанной, системой координат - при подвижной относительно носителя антенне. При значениях углов тангажа и (или) крена носителя в НСК, отличных от нуля, оси Y НСК и ЛСК не совпадают, что неизбежно приведет к ошибкам в определении координат цели.
Одним из способов устранения указанного недостатка может быть получение информации о текущем угловом положении антенны на носителе и носителя в пространстве (т.е. о положении осей координат координатных систем ЛСК и НСК), затем пересчет положения плоскости азимутального пеленга из ЛСК в НСК с использованием информации о текущем положении осей координат координатных систем, и, наконец, вычисление координат точек пересечения плоскости азимутального пеленга, плоскости высоты цели и сферы равной дальности. В этом случае ошибки определения координат цели, связанные с тем, что используются значения координат из различных координатных систем, отсутствуют, так как все выражения, используемые при окончательном вычислении координат цели, (для плоскости азимутального пеленга, плоскости высоты цели и сферы равной дальности) используют значения координат в НСК. Информация о текущем положении осей координат может быть получена от датчиков, входящих в рассматриваемую систему или внешних (из состава носителя системы).
Технический результат изобретения заключается в повышении точности определения координат цели (ответчика) при любом положении антенны запросчика относительно носителя запросчика и при любом положении носителя запросчика в пространстве.
Технический результат для способа достигается тем, что способ определения координат цели в системе «запрос-ответ» с использованием антенны, имеющей заданное направление прицеливания, позволяет объединять как минимум три параметра, которые отражают положение цели, положение носителя антенны и направление прицеливания антенны, при этом в качестве параметров используют расстояние от носителя до цели, высоту цели, высоту носителя. Причем способ отличается от прототипа тем, что в качестве параметров дополнительно используют угловое положение носителя в пространстве, заданное угловое направление антенны на цель относительно носителя, при этом способ включает следующие последовательно осуществляемые этапы:
- устанавливают антенну в направлении цели так, чтобы ответ от цели оказался в основном лепестке диаграммы направленности антенны;
- получают с помощью системы «запрос-ответ» ответные сигналы от цели и определяют с помощью ЦВУ, используя математическое описание ДН антенны, отклонение направления ответных сигналов в плоскости X0Z ЛСК от некоторого заданного направления, однозначно определенного в ЛСК антенны;
- вычисляют азимутальное направление на цель в ЛСК антенны, используя заданное, однозначно определенное в ЛСК антенны направление и отклонение направления на цель;
- по вычисленному азимутальному направлению на цель определяют плоскость азимутального пеленга на цель в ЛСК антенны, перпендикулярную плоскости X0Z ЛСК;
- определяют плоскость азимутального пеленга на цель в системе координат НСК путем пересчета координат трех точек или двух векторов, заданных в плоскости азимутального пеленга, из ЛСК антенны в НСК;
- определяют плоскость высоты цели в НСК, используя полученную от цели с помощью системы запрос-ответ информацию о высоте цели, и сферу равной дальности до цели, используя дальность до цели, получаемую преобразованием интервала времени от выдачи запроса до получения ответа от цели;
- вычисляют возможные положения цели в НСК, как координаты точек пересечения плоскости азимутального пеленга, плоскости высоты цели и сферы равной дальности до цели;
- определяют углы между вектором целеуказания и каждым из направлений на возможные местоположения цели;
- производят отбор местоположения, для которого указанный угол имеет наименьшее значение;
- координаты отобранного местоположения будут являться координатами цели.
Технический результат системы для определения координат цели в системе «запрос-ответ» достигается тем, что система для определения координат цели в системе «запрос-ответ», размещенная на носителе, включает антенну, направляемую на цель, систему «запрос-ответ», выполненную с возможностью сопоставления, как минимум, трех параметров, представляющих положение цели, положение носителя и направление прицеливания антенны для определения местоположения цели, цифровое вычислительное устройство (ЦВУ), выполненное с возможностью вычисления координат цели при любом положении носителя и антенны на носителе, а также датчик высоты. Причем первый вход-выход системы «запрос-ответ» связан с антенной, направленной на цель. Второй вход-выход системы «запрос-ответ» соединен с входом-выходом цифрового вычислительного устройства, Первый вход ЦВУ соединен с выходом датчика высоты. При этом система отличается от прототипа тем, что дополнительно включает датчики углового положения антенны, направляемой на цель, причем второй вход ЦВУ соединен с выходом датчиков углового положения.
Датчики углового положения антенны, направляемой на цель, отслеживают направление, однозначно определенное в ЛСК антенны (равносигнальное направление ДН антенны), т.е. измеряют угловые рассогласования указанного направления в азимутальной и угломестной плоскости от направления строительной оси носителя и передают измеренные значения в ЦВУ для использования в вычислениях.
Сущность изобретения поясняется рисунками Фиг. 1 - Фиг. 3, где
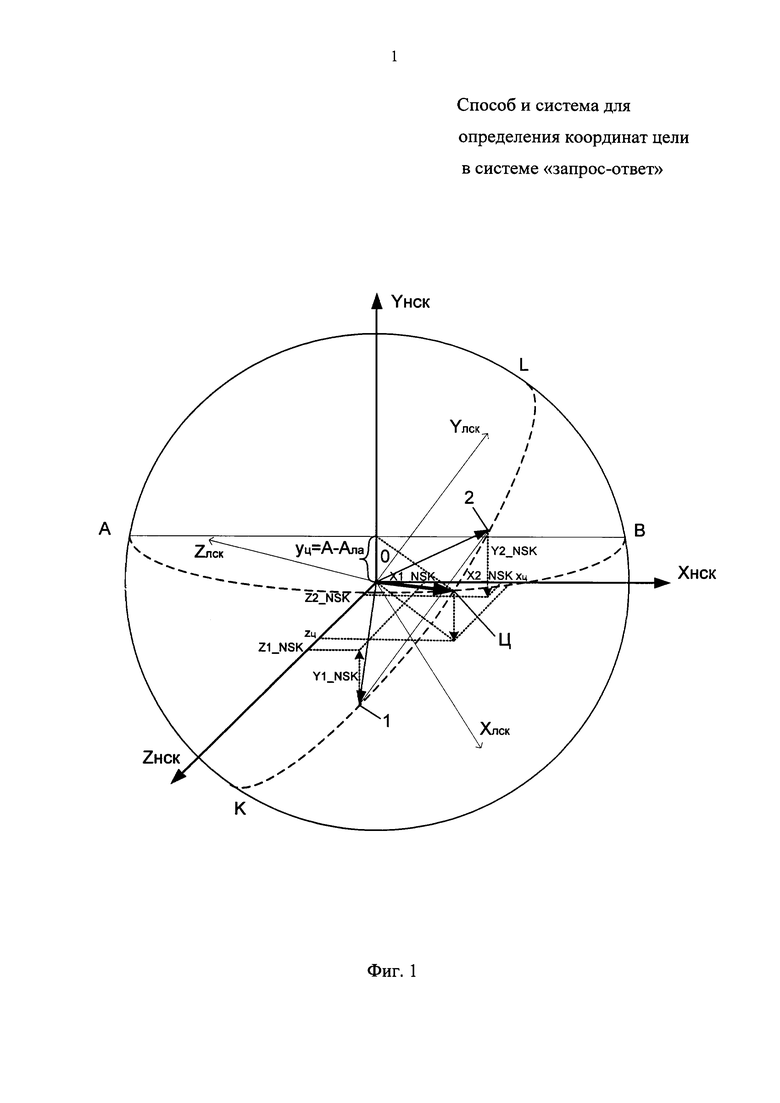
на Фиг. 1 изображена локальная система координат (ЛСК) антенны;
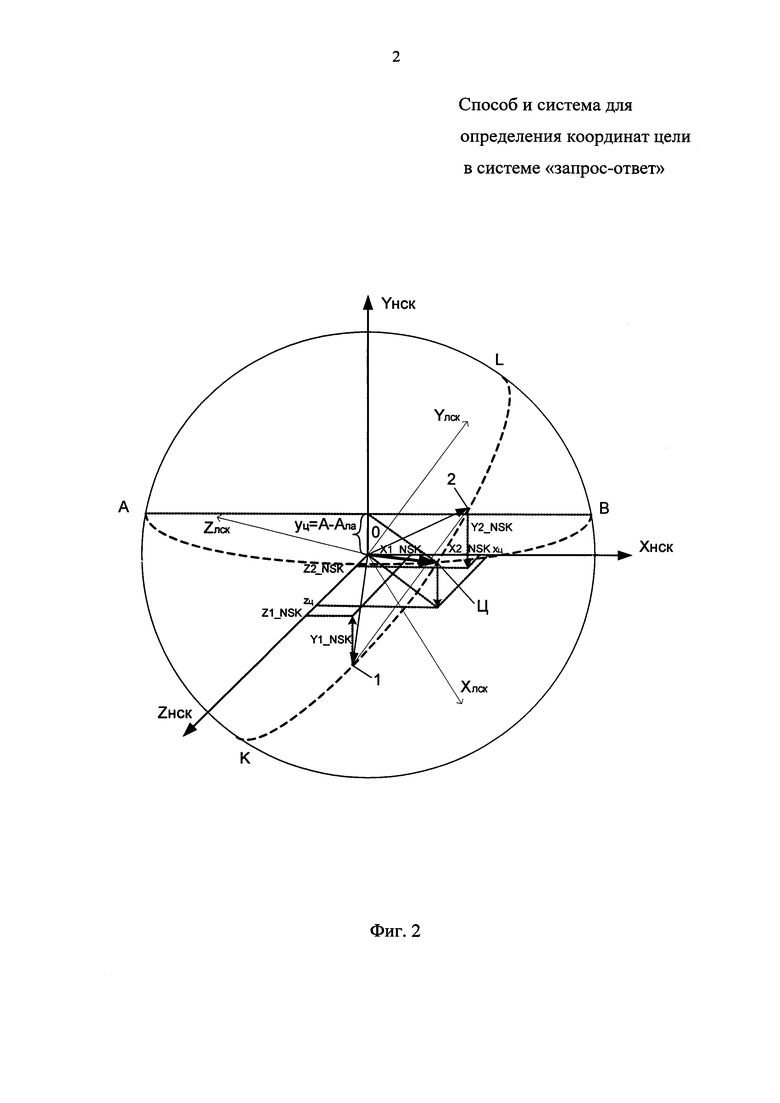
на Фиг. 2 изображена нормальная система координат (НСК) носителя;
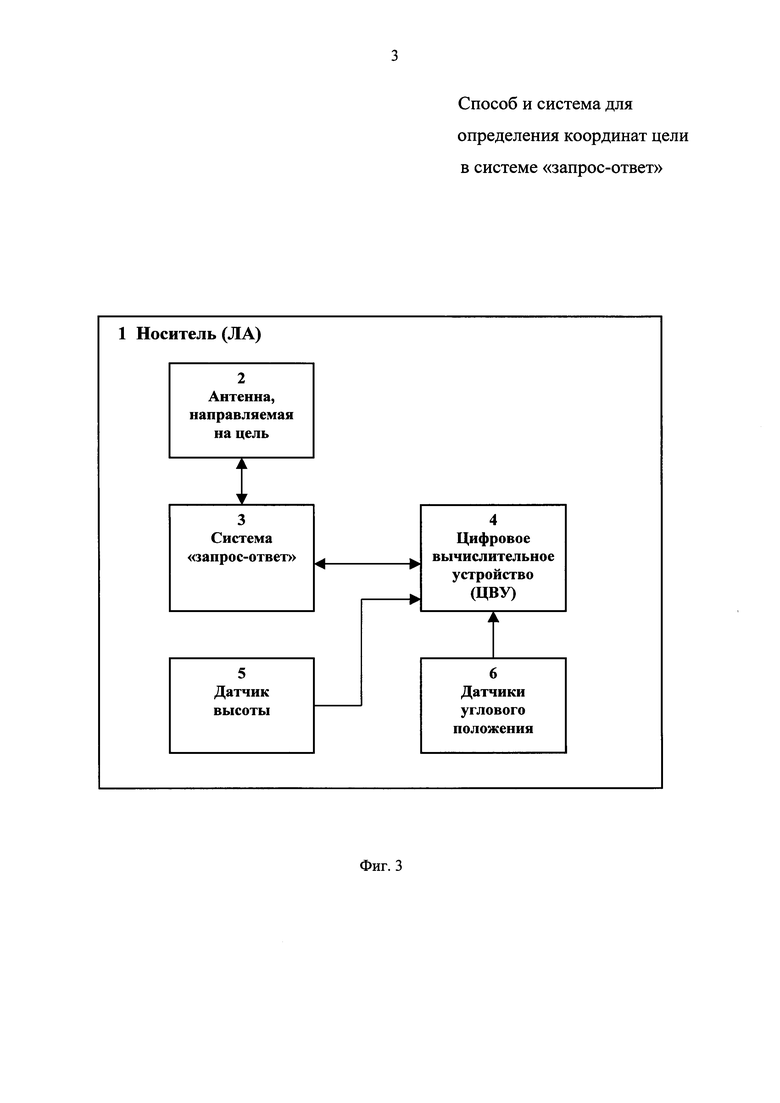
на Фиг. 3 изображена структурная схема системы для определения координат цели в системе «запрос-ответ».
На Фиг. 1 (в ЛСК антенны) представлены:
- оси XЛСК, YЛСК, ZЛСК системы координат ЛСК, начало которой совпадает с началом системы координат НСК, оси которой XНСК, YНСК, ZНСК также обозначены на рисунке. Ось XЛСК всегда направлена в направлении излучения (в направлении разворота) антенны перпендикулярно плоскости ее раскрыва, ось YЛСК направлена вверх в плоскости раскрыва антенны, ось ZЛСК также лежит в плоскости раскрыва антенны так, чтобы с осями XЛСК, YЛСК образовалась правая прямоугольная система координат. Система координат ЛСК жестко связана с антенной, поэтому оси этой системы координат «поворачиваются» вместе с антенной при повороте антенны на носителе. Определение направления на цель, благодаря свойствам диаграммы направленности антенны, производится всегда в ЛСК, при этом диаграмма направленности антенны такова, что позволяет определить направление α на цель с требуемой погрешностью только в плоскости ХЛСК0ZЛСК, и не позволяет определить направление на цель в плоскости, перпендикулярной плоскости XЛСК0ZЛСК.
- окружность К-1-Ц-2-L от пересечения сферы одинаковой дальности D от носителя до цели с плоскостью азимутального пеленга на цель в ЛСК. Плоскость, в которой лежит окружность, перпендикулярна плоскости XЛСК0ZЛСК в ЛСК, а ось YЛСК лежит в плоскости азимутального пеленга;
- местоположение цели Ц, расположенной на сфере одинаковой дальности D и, следовательно, на окружности К-1-Ц-2-L;
- два вектора 01 и 02, лежащие в плоскости азимутального пеленга на цель, координаты концов которых [X1_LSK, Y1_LSK, Z1_LSK; X2_LSK, Y2_LSK, Z2_LSK] вместе с координатами точки их пересечения [0, 0, 0] образуют три точки, полностью определяющие положение плоскости пеленга в пространстве, при этом X1_LSK=X2_LSK=X_LSK и Z1_LSK=Z2_LSK=Z_LSK;
На Фиг. 2 (в НСК носителя) представлены:
- локальная система координат (ЛСК) антенны и нормальная система координат (НСК) носителя, начала координат ЛСК и НСК совпадают, а сам носитель расположен в точке начала координат НСК;
- окружность K-1-Ц-2-L, лежащая в плоскости азимутального пеленга на цель (в ЛСК). Плоскость, в которой лежит указанная окружность, в общем случае не является перпендикулярной плоскости XOZ НСК;
- два вектора 01 и 02, лежащие в плоскости азимутального пеленга на цель, координаты концов которых [X1_NSK, Y1_NSK, Z1_NSK; X2_NSK, Y2_NSK, Z2_NSK] вместе к координатами точки их пересечения [0, 0, 0] образуют три точки, полностью определяющие положение плоскости пеленга в пространстве;
- окружность А-Ц-В от пересечения плоскости одинаковой высоты цели уц=А-Ала со сферой одинаковой дальности. Плоскость, в которой лежит окружность, параллельна плоскости X0Z НСК.
Способ определения координат цели в системе «запрос-ответ» осуществляется следующим образом.
1. При выполнении циклов «Запрос носителя» - «Ответ цели» система определяет направление на цель в азимутальной плоскости ЛСК (производит пеленгацию цели в азимутальной плоскости). Результатом определения направления на цель является значение угла α отклонения проекции (на плоскость XЛCК0ZЛCК) направления на цель от оси 0ХЛСК. При этом, вследствие свойств диаграммы направленности антенны, определение направления на цель в угломестной плоскости ЛСК затруднено или невозможно. Это означает, что цель может находиться на окружности K-1-Ц-2-L в любом месте, преимущественно между векторами 1 и 2. В процессе выполнения циклов «Запрос носителя» - «Ответ цели» используются запросы носителя определенного вида, ответы на которые содержат информацию об абсолютной высоте цели. Абсолютная высота носителя принимается от датчика высоты, установленного на носителе.
2. Для получения выражения плоскости азимутального пеленга на цель в НСК, необходимого для вычисления координат цели, формируются два вектора 1 и 2, принадлежащие плоскости азимутального пеленга и начинающиеся в начале системы координат ЛСК. Например, это могут быть вектора, ограничивающие полезный сектор диаграммы направленности антенны в угломестной плоскости ЛСК, и имеющие одинаковый по величине и противоположный по знаку наклон к плоскости ХЛСК0ZЛСК. Так как положение плоскости азимутального пеленга зависит только от направления векторов, и не зависит от их длины, можно использовать вектора 1 и 2 единичной длины. Для ширины полезного сектора диаграммы направленности (ДН) антенны 60° в угломестной плоскости ЛСК, расположенного симметрично относительно плоскости ХЛСК0ZЛСК, координаты концов этих векторов будут (начала векторов расположены в точке с координатами [0, 0, 0]Т):
Вектора 1 и 2 однозначно определяют плоскость азимутального пеленга в любой правой прямоугольной системе координат, в том числе в ЛСК и в НСК. Для определения плоскости азимутального пеленга в другой правой прямоугольной системе координат достаточно координаты концов указанных векторов преобразовать из ЛСК в требуемую систему координат. Такое преобразование из ЛСК в НСК может быть выполнено, например, в соответствии с ГОСТ 20058-80, путем использования матрицы преобразования составляющих вектора:

Матрица преобразования составляющих вектора, в свою очередь, образуется последовательным перемножением матриц «поворотов» системы координат ЛСК, отражающих «поворот» системы координат ЛСК на углы угломестного и азимутального смещения ЛСК относительно ССК, на углы крена, тангажа и рыскания ССК относительно НСК (информация о соответствующих углах принимается от датчиков углового положения антенны, установленных на носителе):

где ψ, ϑ, γ, β, ε - значения поворотов на углы рыскания, тангажа и крена системы координат ССК относительно НСК, на углы азимутального и угломестного смещения ЛСК относительно ССК соответственно.
3 Точки возможного местонахождения цели должны одновременно принадлежать:
- плоскости азимутального пеленга на отвечающий объект;
- сфере с радиусом D одинаковой дальности до цели;
- плоскости одинаковой высоты цели.
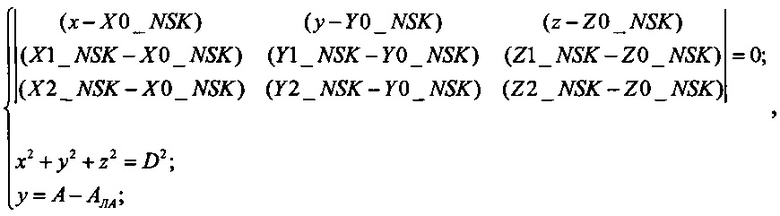
Математически это описывается системой уравнений:
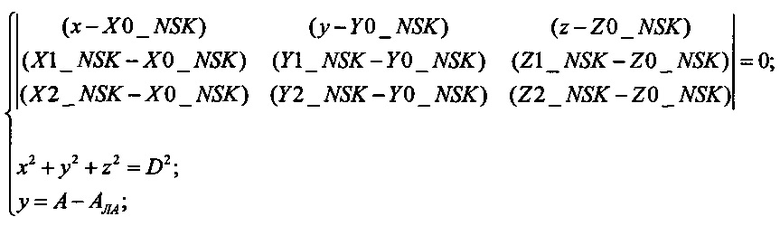
где:
- первое уравнение - уравнение плоскости азимутального пеленга в системе координат НСК, в матричной форме записи;
- второе уравнение - уравнение сферы одинаковой дальности до цели в системе координат НСК;
- третье уравнение - уравнение плоскости одинаковой высоты цели относительно носителя в системе координат НСК.
С учетом того, что [X0_NSK; Y0_NSK; Z0_NSK]=[0; 0; 0], и после замены переменных



h=А-АЛА,
система уравнений принимает вид:
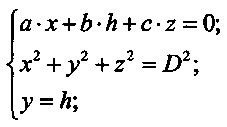
Можно показать, что решением указанной системы уравнений будут значения координат возможных местоположений T1, Т2 цели:
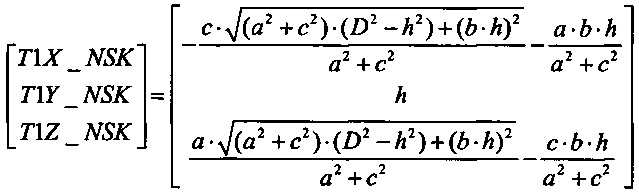
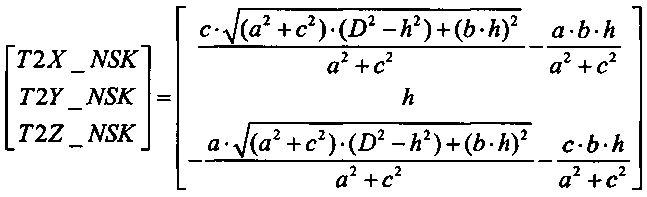
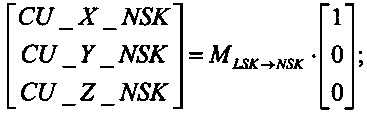
4. Отбор одного из двух возможных местоположений цели производится по заданному критерию, например - по наименьшему отклонению направления на цель от направления разворота антенны (от направления целеуказания). Направление целеуказания может быть задано изначально, или может определяться (как направление разворота антенны) исходя из предположения, что направление разворота антенны является направлением вектора оси ХЛСК, имеющем в ЛСК координаты [1, 0, 0]Т. Во втором случае пересчет координат вектора направления разворота антенны из ЛСК в НСК производится с использованием матрицы преобразования составляющих вектора, пересчитанные координаты вектора принимаются в качестве координат вектора направления целеуказания:
Углы между двумя векторами (направлением целеуказания и направлениями на возможное местоположение цели) определяются, например, вычислением косинусов этих углов по формуле (выводится из формулы для скалярного произведения векторов):

где  - угол между вектором целеуказания и направлением на i-e местоположение цели и координаты i-го местоположения цели соответственно.
- угол между вектором целеуказания и направлением на i-e местоположение цели и координаты i-го местоположения цели соответственно.
После определения углов между вектором целеуказания и каждым из направлений на возможные местоположения цели производится отбор того местоположения, для которого указанный угол имеет наименьшее значение. Координаты отобранного местоположения будут являться координатами цели.
Система для определения координат цели в системе «запрос-ответ» (Фиг. 3), размещенная на носителе 1, включает антенну 2, направляемую на цель, систему «запрос-ответ» 3, выполненную с возможностью сопоставления, как минимум, трех параметров, представляющих положение цели, положение носителя и направление прицеливания антенны для определения местоположения цели, а также цифровое вычислительное устройство 4 (ЦВУ) (в частном случае может быть составной частью системы «запрос-ответ»), выполненное с возможностью вычисления координаты цели при любом положении носителя и антенны на носителе, датчик высоты 5 и датчики углового положения антенны 6, направляемой на цель. При этом первый вход-выход системы «запрос-ответ» 3 связан с антенной 2, направляемой на цель. Второй вход-выход системы «запрос-ответ» 3 соединен с входом-выходом цифрового вычислительного устройства 4. Первый вход ЦВУ 4 соединен с выходом датчика высоты 5. Второй вход ЦВУ 4 соединен с выходом датчиков углового положения 6.
Система определения координат цели в системе «запрос-ответ» работает следующим образом.
- разворачивает антенну (или носитель с антенной, если антенна неподвижна относительно носителя) в направлении цели так, чтобы ответ от цели оказался в основном лепестке диаграммы направленности антенны;
- в процессе исполнения циклов «Запрос от носителя - Ответ от цели» система получает ответные сигналы от цели и с помощью ЦВУ, используя математическое описание ДН антенны, определяет отклонение направления ответных сигналов в плоскости X0Z ЛСК (в плоскости угла рыскания в ЛСК) от некоторого заданного направления (например, от равносигнального направления диаграммы направленности антенны), однозначно определенного в ЛСК антенны;
- система с помощью ЦВУ определяет плоскость высоты цели в НСК, используя полученную от цели информацию о высоте цели, и сферу равной дальности до цели, используя дальность до цели, получаемую преобразованием интервала времени от выдачи запроса до получения ответа от цели;
- по вычисленному азимутальному направлению (углу рыскания) на цель с помощью ЦВУ система определяет плоскость азимутального пеленга на цель в ЛСК антенны, перпендикулярную плоскости X0Z ЛСК (т.е. плоскость, которой принадлежит одновременно и ось Y ЛСК, и вектор направления на цель в ЛСК). Плоскость азимутального пеленга на цель в ЛСК антенны определяется заданием двух векторов, пересекающихся в точке начала координат и направленных так, что их азимутальные координаты в ЛСК антенны одинаковы, а значения координат Y в ЛСК противоположны. Длина векторов может быть принята либо равной дальности до цели, измеренной в процессе исполнения циклов «Запрос от носителя - Ответ от цели», либо принята равной единице;
- система с помощью ЦВУ определяет плоскость азимутального пеленга на цель в системе координат НСК путем пересчета координат заданных ранее векторов из ЛСК антенны в НСК, используя, например, матрицу MLSK→NSK преобразования составляющих вектора (по ГОСТ 20058-80). При вычислении матрицы преобразования составляющих вектора используются значения рыскания, тангажа и крена носителя от датчиков, определяющих положение носителя, и значения рыскания, тангажа и крена заданного направления антенны (например, равносигнального направления) на носителе:

система находит решения совокупности математических уравнений
представляющие координаты  и
и  в НСК возможных положений Т1 и Т2 цели в пространстве;
в НСК возможных положений Т1 и Т2 цели в пространстве;
- из найденных решений (максимально - два решения) система отбирает одно, удовлетворяющее условию минимального отклонения положения цели в пространстве от заданного направления (например - от направления целеуказания, или от направления, в которое установлена антенна), путем определения углов между направлениями на положение цели в пространстве и заданным направлением, с последующим отбором направления, для которого угол отклонения минимален:

Таким образом, повышение точности определения координат цели (ответчика) при любом положении антенны запросчика относительно носителя запросчика и при любом положении носителя запросчика в пространстве осуществляют путем получения информации от датчиков углового положения о текущем угловом положении антенны на носителе и носителя в пространстве (о положении осей координат координатных систем ЛСК и НСК), пересчета положения плоскости азимутального пеленга из ЛСК в НСК с использованием информации о текущем положении осей координат координатных систем, и вычисления координат точек пересечения плоскости азимутального пеленга, плоскости высоты цели и сферы равной дальности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и система определения координат цели в системе запрос-ответ | 2016 |
|
RU2631117C1 |
| Система для определения координат цели в системе запрос-ответ | 2021 |
|
RU2778018C1 |
| Способ определения координат цели в системе "запрос-ответ" | 2020 |
|
RU2742945C1 |
| Способ определения координат цели в системе запрос-ответ | 2021 |
|
RU2778019C1 |
| Способ определения координат целей с помощью аппроксимированной пеленгационной характеристики | 2021 |
|
RU2777849C1 |
| Система для определения координат цели | 2020 |
|
RU2742944C1 |
| СИСТЕМА МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИИ С УМЕНЬШЕННОЙ ОШИБКОЙ ПЕЛЕНГАЦИИ | 2023 |
|
RU2803141C1 |
| Система моноимпульсной радиолокации с уменьшенной ошибкой пеленгации | 2023 |
|
RU2828197C1 |
| Способ определения местоположения воздушных объектов по сигналам их бортовых ответчиков систем контроля воздушного движения | 2016 |
|
RU2626765C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ СТАБИЛИЗАЦИИ И САМОНАВЕДЕНИЯ ПОДВИЖНОГО НОСИТЕЛЯ И БОРТОВАЯ СИСТЕМА САМОНАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2303229C1 |
Изобретение относится к области радиолокации и может быть использовано в системах вторичной радиолокации при определении координат цели в системе «запрос-ответ». Достигаемый технический результат изобретения - повышение точности определения координат цели (ответчика) при любом положении антенны запросчика относительно носителя запросчика и при любом положении носителя запросчика в пространстве. Указанный результат достигается тем, что способ определения координат цели в системе «запрос-ответ» с использованием антенны, имеющей заданное направление прицеливания, позволяет объединять как минимум три параметра, которые отражают положение цели, положение носителя антенны и направление прицеливания антенны, при этом в качестве параметров используют расстояние от носителя до цели, высоту цели, высоту носителя, угловое положение носителя в пространстве, заданное угловое направление антенны на цель относительно носителя. При этом система, реализующая способ, размещена на носителе и содержит антенну, направляемую на цель, систему «запрос-ответ», выполненную с возможностью сопоставления, как минимум, трех параметров, представляющих положение цели, положение носителя и направление прицеливания антенны для определения местоположения цели, цифровое вычислительное устройство (ЦВУ), выполненное с возможностью вычисления координат цели при любом положении носителя и антенны на носителе, а также датчик высоты и датчики углового положения антенны, направляемой на цель. 2 н.п. ф-лы, 3 ил.
1. Способ определения координат цели в системе «запрос-ответ» с использованием антенны, имеющей заданное направление прицеливания, и объединяющий, как минимум три параметра, которые отражают положение цели, положение носителя антенны и направление прицеливания антенны, причем в качестве параметров используют расстояние от носителя до цели, высоту цели, высоту носителя, отличающийся тем, что в качестве параметров дополнительно используют угловое положение носителя в пространстве и заданное угловое направление антенны на цель относительно носителя, при этом способ включает следующие последовательно осуществляемые этапы: устанавливают антенну в направлении цели так, чтобы ответ от цели оказался в основном лепестке диаграммы направленности антенны; получают с помощью системы «запрос-ответ» ответные сигналы от цели и определяют с помощью цифрового вычислительного устройства (ЦВУ), используя математическое описание диаграммы направленности (ДН) антенны, отклонение направления ответных сигналов в плоскости X0Z локальной системы координат (ЛСК) от некоторого заданного направления, однозначно определенного в ЛСК антенны; вычисляют азимутальное направление на цель в ЛСК антенны, используя заданное, однозначно определенное в ЛСК антенны направление и отклонение направления на цель; по вычисленному азимутальному направлению на цель определяют плоскость азимутального пеленга на цель в ЛСК антенны, перпендикулярную плоскости X0Z ЛСК; определяют плоскость азимутального пеленга на цель в нормальной системе координат (НСК) путем пересчета координат трех точек или двух векторов, заданных в плоскости азимутального пеленга, из ЛСК антенны в НСК; определяют плоскость высоты цели в НСК, используя полученную от цели с помощью системы «запрос-ответ» информацию о высоте цели, и сферу равной дальности до цели, используя дальность до цели, получаемую преобразованием интервала времени от выдачи запроса до получения ответа от цели; вычисляют возможные положения цели в НСК, как координаты точек пересечения плоскости азимутального пеленга, плоскости высоты цели и сферы, равной дальности до цели; определяют углы между вектором целеуказания и каждым из направлений на возможные местоположения цели; производят отбор местоположения, для которого указанный угол имеет наименьшее значение; координаты отобранного местоположения будут являться координатами цели.
2. Система для определения координат цели в системе «запрос-ответ», размещенная на носителе, включающая антенну, направляемую на цель, систему «запрос-ответ», выполненную с возможностью сопоставления, как минимум, трех параметров, представляющих положение цели, положение носителя и направление прицеливания антенны для определения местоположения цели, а также цифровое вычислительное устройство (ЦВУ), выполненное с возможностью вычисления координат цели при любом положении носителя и антенны на носителе, датчик высоты, причем первый вход-выход системы «запрос-ответ» связан с антенной, направленной на цель, второй вход-выход системы «запрос-ответ» соединен с входом-выходом цифрового вычислительного устройства, первый вход ЦВУ соединен с выходом датчика высоты, отличающаяся тем, что дополнительно включает датчики углового положения антенны, направляемой на цель, при этом второй вход ЦВУ соединен с выходом датчиков углового положения.
| US 6933879 B2, 23.08.2005 | |||
| 0 |
|
SU158344A1 | |
| РАДИОЛОКАЦИОННЫЙ ЗАПРОСЧИК СИСТЕМЫ АКТИВНОГО ЗАПРОСА-ОТВЕТА | 2008 |
|
RU2375723C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОПОЗНАВАНИЯ С ОБЕСПЕЧЕНИЕМ ВОЗМОЖНОСТИ УСТАНОВЛЕНИЯ ПОДЛИННОСТИ ЗАПРОСНОГО СИГНАЛА | 2002 |
|
RU2242020C2 |
| WO 2010012842 A1, 04.02.2010 | |||
| US 8269664 B2, 18.09.2012 | |||
| JP 6281731 A,18.09.2012. | |||

