ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Область техники, к которой относится изобретение
Настоящее изобретение относится к чистящему автомату, робототехнической системе с его использованием и способу управления им, в частности к указанным автомату, системе и способу, обеспечивающим легкое управление движением чистящего автомата в заданную точку благодаря использованию информации об участке выполнения работы.
Уровень техники
Известные чистящие автоматы и робототехнические системы перемещаются по очищаемой поверхности на заданном участке выполнения уборки, удаляя с очищаемой поверхности посторонние субстанции, такие как частицы грязи или пыли, автоматически, без участия оператора.
В процессе уборки чистящие автоматы определяют расстояние до препятствий, таких как предметы мебели, стены и т.п., и на основе полученной информации управляют своим движением так, чтобы избежать столкновения с препятствием. Наиболее близкими к заявленным устройствам является чистящий автомат и робототехническая система для уборки известные из патента США № 5109566 А, 05.05.1992 и WO 90/14788 А, 13.12.1990.
Для того чтобы чистящий автомат прошел по всему отведенному ему участку выполнения работы, необходимо, чтобы он мог определять свое относительное положение на этом участке.
Хотя было проведено много исследований, посвященных тому, как сделать возможным определение чистящим автоматом своего относительного положения посредством запоминания им образов окружающей обстановки посредством установленной на нем камеры, из-за весьма сложных алгоритмов распознавания образов и высокой вероятности ошибок определения местоположения из-за изменений окружающей обстановки, повышения точности процессов распознавания образов достичь не удалось, и начало массового производства таких автоматов пришлось отложить.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение создано для преодоления вышеописанных недостатков уровня техники. Соответственно целью изобретения является создание чистящего автомата, робототехнической системы с его использованием и способа управления им, которые не только обеспечили бы точность определения местоположения автомата, но и позволили бы отказаться от использования сложных алгоритмов определения местоположения.
Для достижения вышеуказанной цели предложен чистящий автомат для выполнения уборки в режиме беспроводной связи с внешним устройством, содержащий устройство привода нескольких колес, установленных на корпусе чистящего автомата, устройство сбора удаляемых загрязнений, установленное на корпусе для удаления и сбора загрязнений с поверхности пола на участке выполнения работы, группу бесконтактных выключателей, расположенных на нижней поверхности корпуса, обращенной к поверхности пола, на заданном расстоянии друг от друга для обнаружения присутствия металлического элемента со стороны поверхности пола, и устройство управления, рассчитывающее расстояние и траекторию движения с использованием сигналов, получаемых от бесконтактных выключателей во время движения чистящего автомата, и управляющее устройством привода с обеспечением выполнения устройством привода заданной работы с использованием рассчитанной траектории.
Бесконтактный выключатель содержит генератор колебаний, вырабатывающий колебательный сигнал посредством детекторной катушки, детектор колебаний, обнаруживающий амплитуду колебаний из детекторной катушки, и интегратор, интегрирующий выходной сигнал, полученный посредством детекторного контура и выдающий интегрированный сигнал.
Бесконтактные выключатели расположены в ряд вдоль линии, соединяющей оси колес, расположенных напротив друг друга.
Число бесконтактных выключателей является нечетным, таким образом, что один бесконтактный выключатель расположен в середине линии, соединяющей оси колес, а остальные бесконтактные выключатели расположены симметрично по обе стороны среднего бесконтактного выключателя.
Для достижения вышеуказанной цели предложена также робототехническая система для уборки, содержащая чистящий автомат, выполняющий уборку в режиме беспроводной связи с внешним устройством, содержащий группу бесконтактных выключателей, расположенных в ряд на нижней поверхности корпуса, и направляющую плиту, расположенную в полу на участке выполнения работы и содержащую металлические полосы, расположенные по заданной схеме с возможностью их обнаружения бесконтактными выключателями.
Эти металлические полосы расположены в нижней части направляющей плиты.
Для достижения вышеуказанной цели предложен также способ управления чистящим автоматом, определяющим свое местоположение с использованием сигналов обнаружения металлических полос, расположенных по заданной схеме на поверхности пола участка выполнения работы, группой бесконтактных выключателей, расположенных на нижней поверхности корпуса чистящего автомата на заданном расстоянии друг от друга. Этот способ управления предусматривает стадии создания и запоминания карты-схемы расположения металлических полос во время перемещения чистящего автомата по участку выполнения работы, определения, при наличии сигнала на выполнение работы, местоположения чистящего автомата путем сравнения карты-схемы с сигналом обнаружения металлической полосы бесконтактными выключателями и расчета маршрута движения из точки определенного местоположения в заданную точку, и перемещения чистящего автомата по рассчитанному маршруту движения.
Согласно этому способу используют по меньшей мере три бесконтактных выключателя, расположенных симметрично в ряд вдоль линии, соединяющей оси расположенных напротив друг друга колес чистящего автомата, причем при получении сигнала обнаружения металлической полосы от крайних бесконтактных выключателей во время движения чистящего автомата движение временно прекращают и рассчитывают параметры коррекции траектории, включающие в себя изменение направления движения и прямолинейное перемещение чистящего автомата, требуемые для приведения чистящего автомата в точку, где металлическую полосу обнаружит средний бесконтактный выключатель, перемещают чистящий автомат в соответствии с параметрами коррекции траектории, и при обнаружении металлической полосы средним бесконтактным выключателем продолжают управление работой чистящего автомата.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Вышеуказанные задачи и отличительные особенности изобретения поясняются ниже в описании с прилагаемыми чертежами, представленными на следующих фигурах:
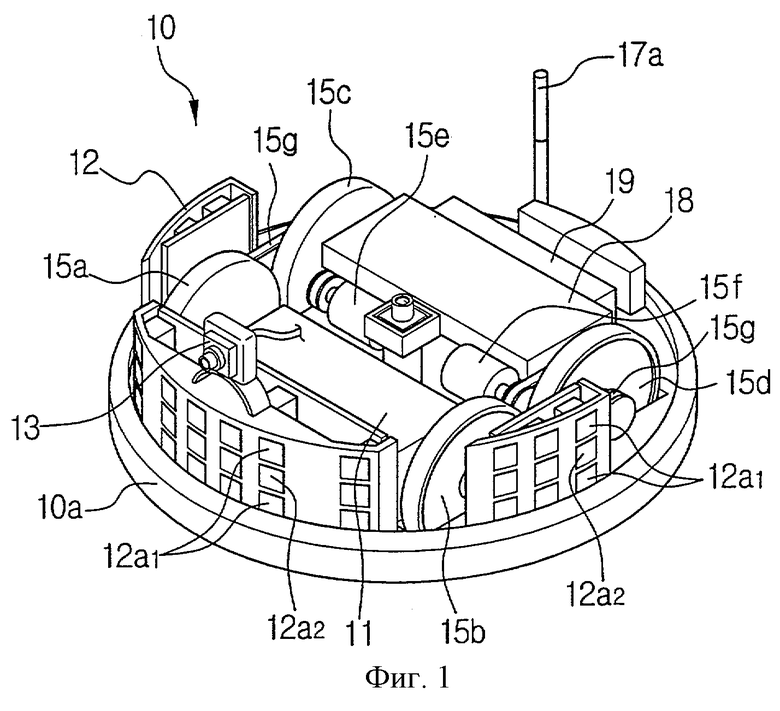
фиг.1 - объемное изображение предложенного чистящего автомата при снятом кожухе,
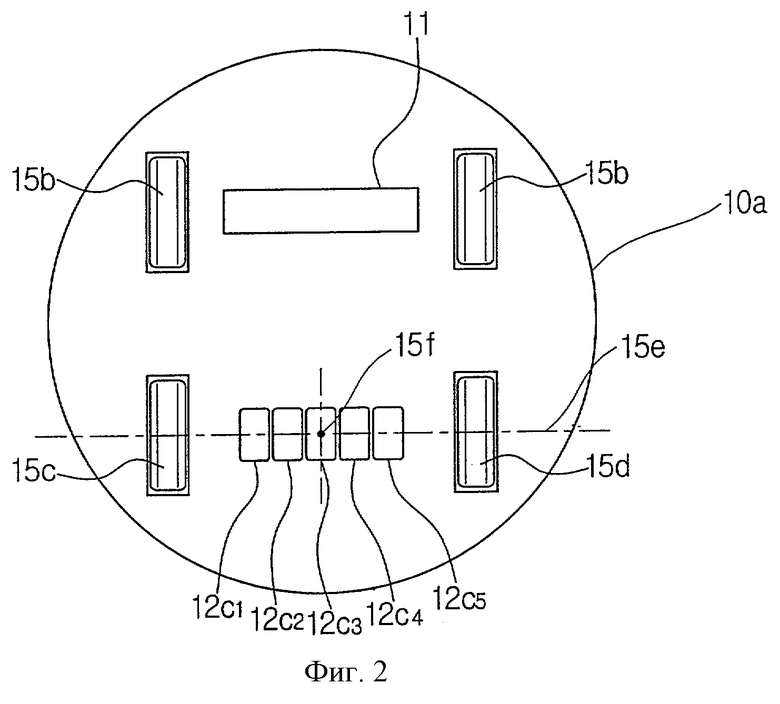
фиг.2 - схематическое изображение чистящего автомата согласно фиг.1 в виде снизу,
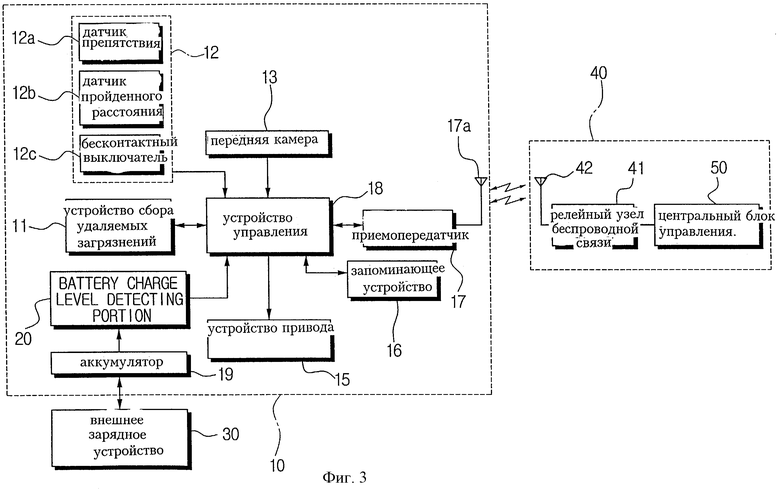
фиг.3 - блок-схема робототехнической системы, в которой используется чистящий автомат согласно фиг.1,
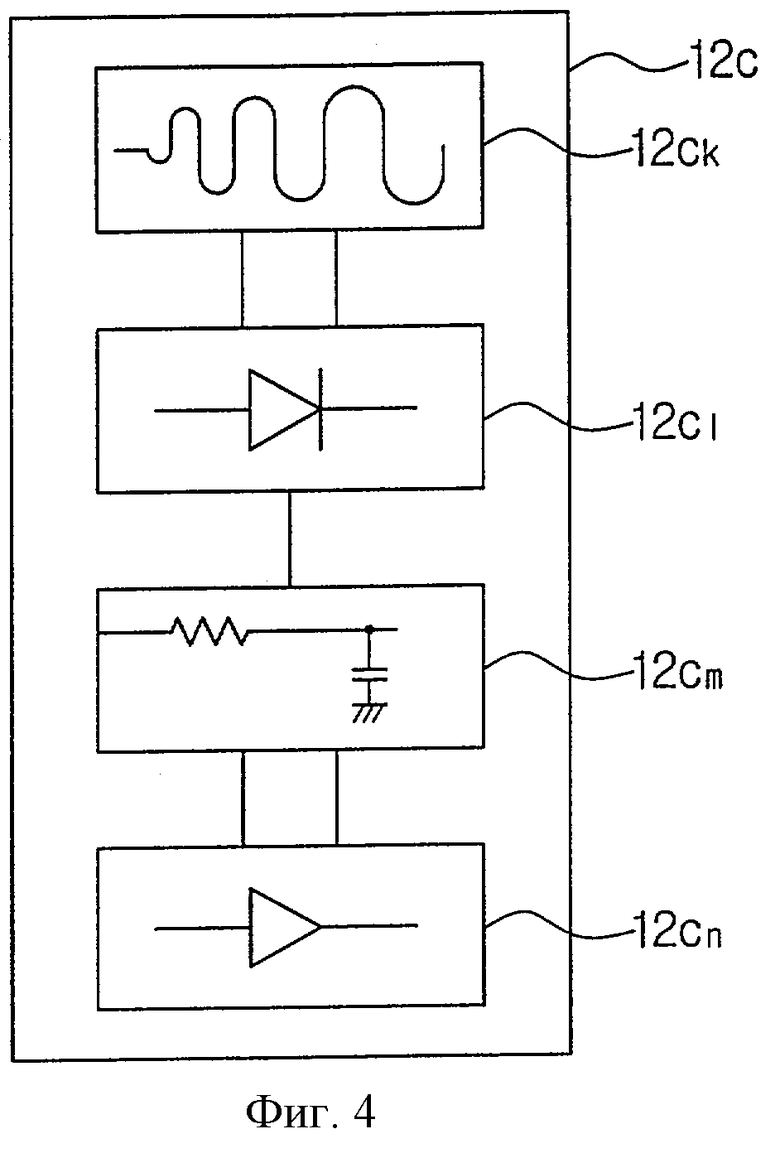
фиг.4 - блок-схема, иллюстрирующая один пример реализации бесконтактного детектора в системе согласно фиг.3,
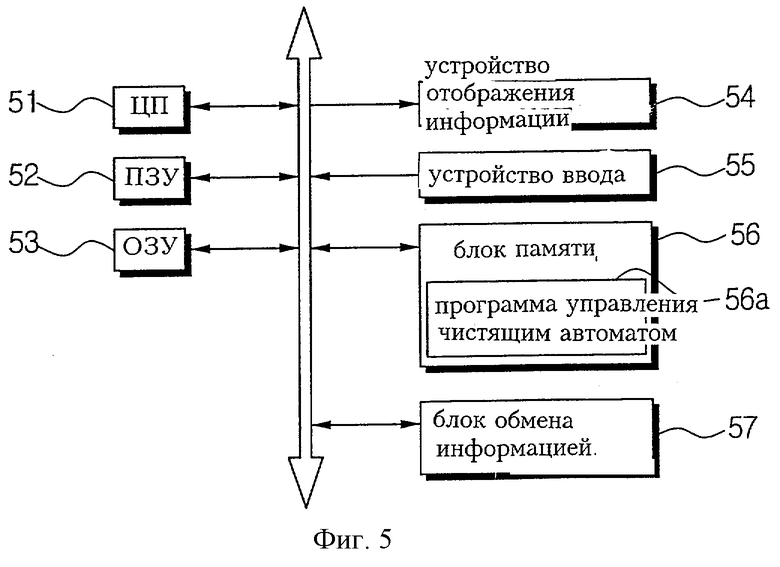
фиг.5 - блок-схема, иллюстрирующая центральный блок управления в системе согласно фиг.3,
фиг.6A-6D - показаны варианты расположения металлических полос, используемых с чистящим автоматом согласно фиг.1,
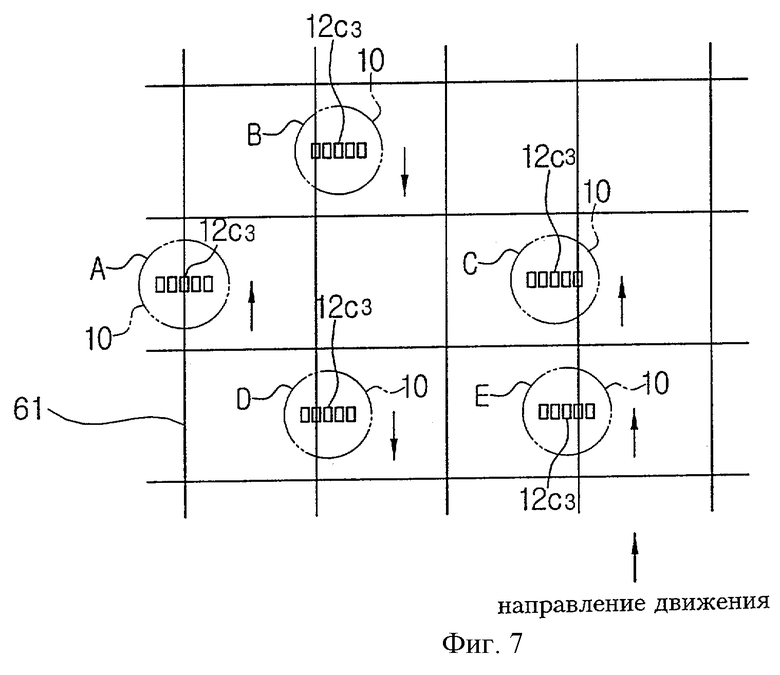
фиг.7 - схема, поясняющая процесс коррекции траектории движения чистящего автомата согласно фиг.1 вдоль металлических полос,
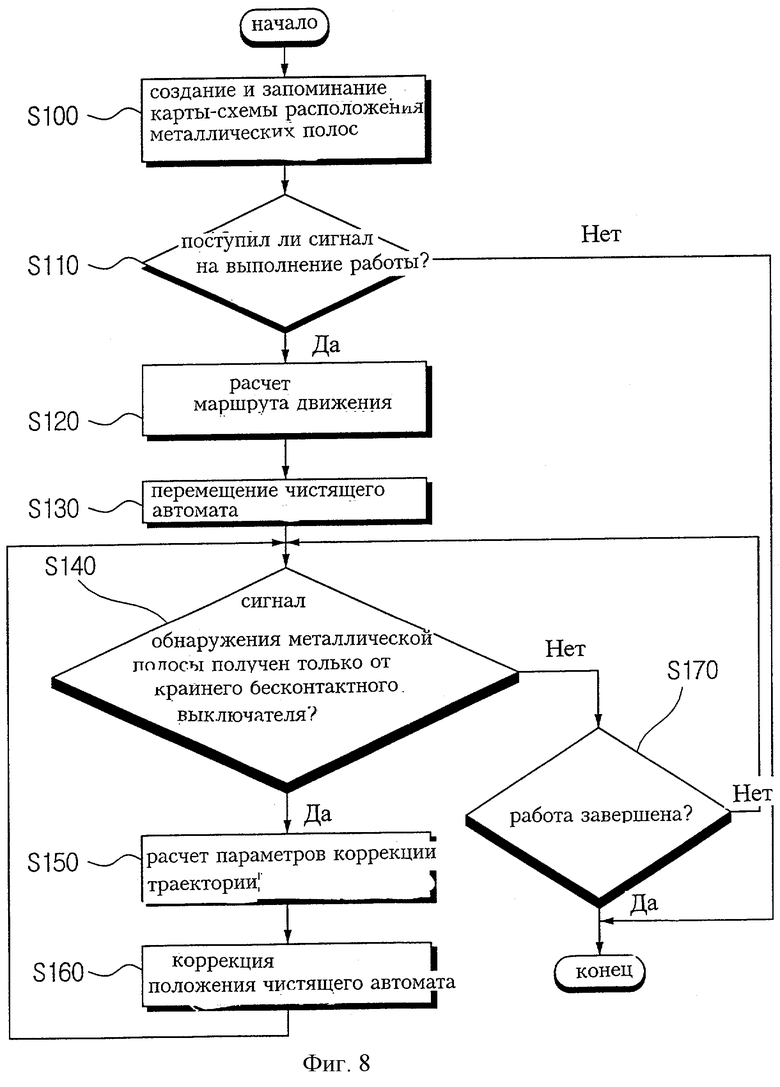
фиг.8 - блок-схема алгоритма коррекции положения чистящего автомата согласно фиг.1 для его выравнивания относительно направляющей полосы.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНОГО ВАРИАНТА ИЗОБРЕТЕНИЯ
Далее следует подробное описание предложенных чистящего автомата, робототехнической системы с его использованием и способа управления им в соответствии с предпочтительным вариантом осуществления настоящего изобретения, поясняемое прилагаемыми чертежами.
На фиг.1 представлен вид предложенного чистящего автомата в предпочтительном варианте осуществления изобретения, со снятым кожухом. На фиг.2 представлен вид снизу чистящего автомата согласно фиг.1, а на фиг.3 - блок-схема робототехнической системы, в которой используется чистящий автомат согласно фиг.1.
Чистящий автомат 10 содержит устройство 11 сбора удаляемых загрязнений, блок чувствительных элементов 12, переднюю камеру 13, устройство привода 15, запоминающее устройство 16, приемопередающее устройство 17, устройство управления и аккумулятор 19.
Устройство 11 сбора удаляемых загрязнений установлено на корпусе 10а для удаления и сбора загрязнений с очищаемой поверхности путем их всасывания с окружающим воздухом. Устройство 11 сбора удаляемых загрязнений может быть выполнено во множестве вариантов с применением общеизвестных методов. Например, оно может содержать двигатель со всасывающим насосом (на чертеже не показан) и отсек пылесборника, улавливающего пыль, всасываемую через всасывающее отверстие или всасывающий патрубок при работающем двигателе всасывающего насоса. Всасывающее отверстие или всасывающий патрубок расположен напротив очищаемой поверхности.
Блок чувствительных элементов 12 включает в себя датчики препятствия 12а, установленные на поверхности корпуса на заданном расстоянии друг от друга с возможностью излучения сигнала и приема отраженного сигнала, датчик пройденного расстояния 12b и бесконтактные выключатели 12с.
Датчики препятствия 12а содержат светоизлучающие элементы 12а1 и фотодетекторы 12а2, воспринимающие отраженное излучение. Светоизлучающие элементы и фотодетекторы расположены по внешней окружности датчика препятствия 12а на заданном расстоянии друг от друга и вертикальными рядами. В другом варианте датчики препятствия 12а могут быть представлены ультразвуковыми датчиками, генерирующими ультразвуковые колебания и воспринимающими отраженные колебания. Датчики препятствия 12а также используются для измерения расстояния до препятствия или стены.
Датчики расстояния 12b могут быть датчиками оборотов, определяющими число оборотов колес 15a-15d в минуту. Например, такой датчик оборотов может быть выполнен в виде преобразователя, измеряющего число оборотов двигателей 15е и 15f в минуту.
Как показано на фиг.2, бесконтактные выключатели 12с расположены на нижней поверхности корпуса 10а обращенными к поверхности участка выполнения работы.
В предпочтительном случае бесконтактные выключатели 12с установлены на заданном расстоянии друг от друга, располагаясь симметрично на воображаемой линии 15е, проходящей через центры двух колес 15с и 15d, т.е. на осевой линии 15е колес 15с и 15d. Предпочтительно также, чтобы число бесконтактных выключателей 12с было нечетным, таким образом, чтобы один бесконтактный выключатель 12с располагался в средней точке 15f осевой линии 15е, а остальные бесконтактные выключатели 12с симметрично располагались по обе стороны среднего бесконтактного выключателя 12с. Предпочтительно применение пяти бесконтактных выключателей 12с.
Когда бесконтактные выключатели 12с расположены на осевой линии 15е колес 15с и 15d, как это описано выше, можно легко корректировать траекторию движения чистящего автомата 10 по сигналам от бесконтактных выключателей 12с, при этом цикл коррекции траектории включает в себя поворот на 90°, прямолинейное движение и еще один поворот на 90°.
В предпочтительном случае в качестве бесконтактных выключателей 12с используются широко известные устройства, которые обнаруживают присутствие металлического материала со стороны очищаемой поверхности на участке выполнения работы на расстоянии, находящемся в пределах заданного диапазона чувствительности.
Например, бесконтактные выключатели 12с могут быть выполнены в виде выключателей колебательного типа, определяющих присутствие металлического материала путем выработки колебательного сигнала заданной частоты, обнаружения изменения амплитуды сигнала, возникшего вследствие взаимодействия металлического материала с магнитным полем, порожденным колебаниями. В другом случае бесконтактные выключатели 12с могут быть выключателями емкостного типа, определяющими присутствие обнаруживаемого объекта по изменению емкостного сопротивления, соответствующему расстоянию между электродом детектора и обнаруживаемым объектом.
В рассматриваемом варианте изобретения бесконтактные выключатели 12с являются выключателями колебательного типа.
Как показано на фиг.4, основными элементами выключателей 12с колебательного типа являются генератор колебаний 12ck, детектор колебаний 12сl и интегратор 12cm. В зависимости от уровня чувствительности может быть предусмотрен усилитель.
Генератор колебаний 12ck вырабатывает высокочастотный колебательный сигнал посредством детекторной катушки, расположенной рядом с контролируемой поверхностью.
Детектор колебаний 12сl обнаруживает амплитуду колебаний в детекторной катушке генератора колебаний 12ck и выдает соответствующий сигнал.
Интегратор 12cm интегрирует сигнал с выхода детектора колебаний 12сl и выдает результат в устройство управления 18 через усилитель 12сn.
Когда к магнитному полю тока высокой частоты, создаваемому в детекторной катушке за счет электромагнитной индукции, приближается обнаруживаемый объект, т.е. металлический материал, в обнаруживаемом объекте (металлическом материале) возникают вихревые токи. Такие вихревые токи сопровождаются изменением магнитного потока в детекторной катушке, и электромагнитные колебания во внутреннем колебательном контуре генератора 12ck ослабляются по амплитуде или затухают. Бесконтактные выключатели 12с колебательного типа выявляют присутствие обнаруживаемого объекта (металлического материала) на основе такого взаимодействия.
В предпочтительном случае металлические полосы, обнаруживаемые бесконтактными выключателями 12с, расположены в нижней части пола.
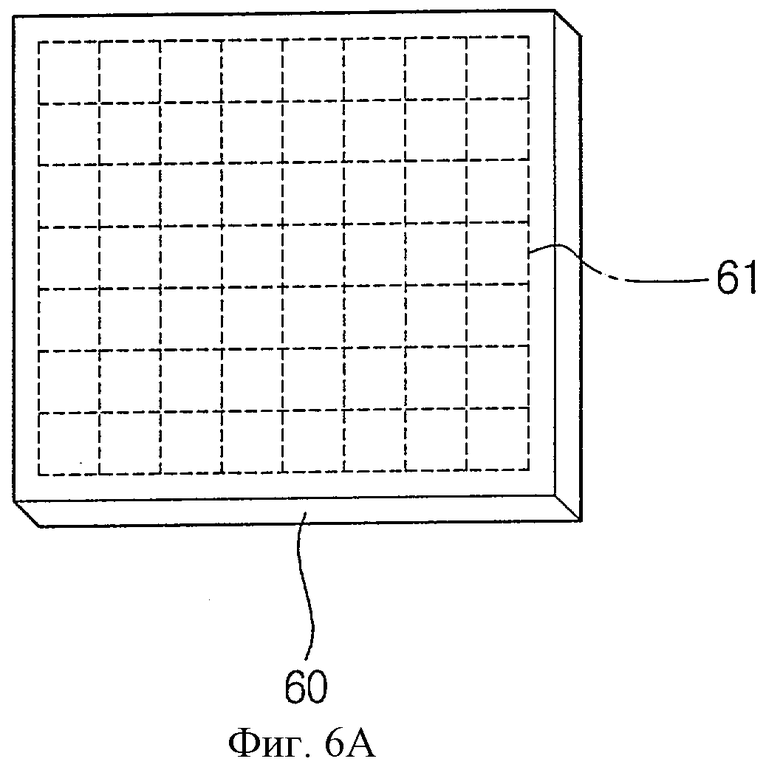
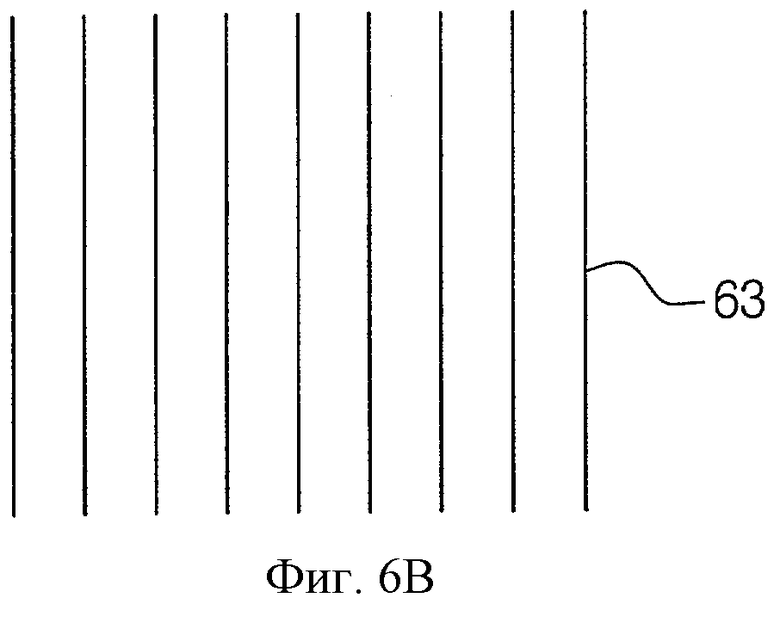
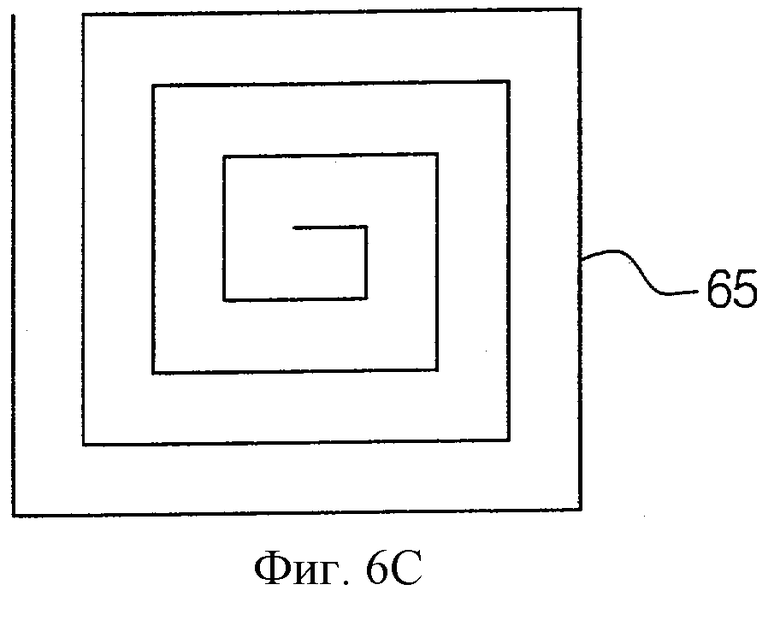
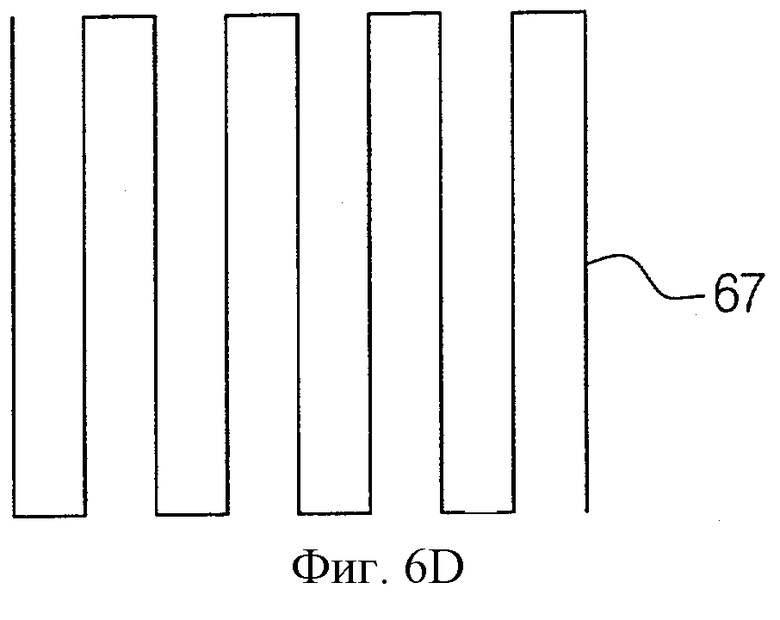
Например, как показано на фиг.6A-6D, металлические полосы 61, 63, 65, 67 проложены на направляющей плите 60 по заданной схеме. Металлические полосы 61, 63, 65, 67 выполнены таким образом, что ширина полосы соответствует площади, контролируемой бесконтактными выключателями 12с.
В более предпочтительном варианте металлические полосы 61, 63, 65, 67 проложены согласно типовым схемам, показанным на фиг: 6A-6D, под направляющей плитой 60, представляющей собой так называемую напольную плиту, и не видны снаружи. Также предпочтительно выполнение направляющей плиты 60 из гибкого изолирующего материала, за исключением металлических полос 61, 63, 65, 67.
Толщина направляющей плиты 60 выбирается соответственно диапазону чувствительности бесконтактных выключателей 12с чистящего автомата 10. Например, в предпочтительном случае толщина направляющей плиты 60 составляет менее 5 см.
На фиг.6А показаны металлические полосы 61 матричного типа, проложенные в направляющей плите 60. В этом случае, когда бесконтактные выключатели 12с подойдут к пересечению металлических полос 61, со всех бесконтактных выключателей от 12сl до 12с5 поступят сигналы обнаружения металлической полосы. Это позволяет легко обнаружить такое пересечение, что позволяет более точно определять местоположение чистящего автомата 10.
Передняя камера 13 установлена на корпусе 10а для фотографирования сцен по курсу движения чистящего автомата и передачи снятых образов в устройство управления 18.
Устройство привода 15 включает в себя пару передних колес 15а, 15b, установленных по обе стороны спереди чистящего автомата, пару задних колес 15с и 15d, установленных по обе стороны сзади чистящего автомата, два двигателя 15е, 15f для привода пары задних колес 15с и 15d, и приводные ремни 15g, предусмотренные для передачи вращения с задних колес 15с и 15d на передние колеса 15а, 15b. Устройство привода 15 управляет работой двигателей 15е, 15f независимо друг от друга по сигналам от устройства управления 18. У каждого из двигателей 15е, 15f вал вращается в обоих направлениях. Для изменения направления движения чистящего автомата 10 двигатели 15е, 15f работают на разных оборотах. Приемопередающее устройство 17 направляет передаваемые данные на антенну 17а и передает принятый сигнал с антенны 17а в устройство управления 18.
Аккумулятор 19 установлен на корпусе 10а и соединен с разъемом подключения источника энергии (на чертежах не показан). Разъем подключения источника энергии расположен на внешней поверхности корпуса 10а для разъемного соединения с внешним зарядным устройством 30.
Устройство 20 контроля степени зарядки аккумулятора определяет степень зарядки аккумулятора 19 и вырабатывает сигнал о необходимости подзарядки аккумулятора при достижении степенью зарядки заданного нижнего предела.
Устройство управления 18 обрабатывает принятые сигналы, поступающие в него через приемопередающее устройство 17, и управляет соответствующими устройствами. Если на корпусе 10а или на устройстве дистанционного управления 40 установлено клавишное устройство ввода (на чертежах не показано) для ручного выбора функций чистящего автомата 10, устройство управления 18 обрабатывает сигналы, поступившие от клавишного устройства ввода.
Устройство управления 18 предпочтительно управляет соответствующими устройствами таким образом, чтобы в неработающем состоянии чистящий автомат 10 был подключен к внешнему зарядному устройству 30. Сохранение соединения чистящего автомата с внешним зарядным устройством 30 в перерывах между работой позволяет поддерживать степень зарядки аккумулятора 19 на достаточном уровне.
После отключения чистящего автомата от внешнего зарядного устройства 30 для выполнения заданной работы устройство управления 18 направляет чистящий автомат 10 обратно к внешнему зарядному устройству 30, используя информацию о траектории, получаемую бесконтактными выключателями 12с во время движения чистящего автомата. Устройство управления 18 может использовать также визуальную информацию, запоминаемую в камерах 13, в качестве дополнительной информации при выполнении возврата или заданной операции.
Под "заданной операцией" здесь может пониматься уборка на определенной площади или наблюдение посредством камеры 13.
После завершения заданной операции или во время ее выполнения при поступлении сигнала о необходимости подзарядки аккумулятора из устройства 20 контроля степени зарядки аккумулятора устройство управления 18 чистящего автомата 10 рассчитывает траекторию возврата к внешнему зарядному устройству 30, используя информацию о траектории, заложенную в его память в момент отключения от внешнего зарядного устройства 30, и управляет устройством привода 15 так, чтобы чистящий автомат двигался по рассчитанной траектории возврата, одновременно предотвращая отклонение чистящего автомата от этой траектории с использованием сигналов, поступающих от бесконтактных выключателей 12с.
В предпочтительном варианте робототехническая система для уборки имеет архитектуру, обеспечивающую управление работой чистящего автомата 10 извне, а также обработку и анализ изображения, снимаемого камерой 13.
Соответственно чистящий автомат 10 выполнен с возможностью беспроводной передачи изображения, снятого камерой 13, на внешнее устройство и функционирования в соответствии с управляющими сигналами, получаемыми извне. Устройство дистанционного управления 40 управляет чистящим автоматом 10 по беспроводной линии связи, что касается выполнения последовательности операций, таких как уборка, возврат и т.п.
Устройство дистанционного управления 40 включает в себя релейный узел беспроводной связи 41 и центральный блок управления 50.
Релейный узел беспроводной связи 41 обрабатывает сигналы, получаемые от чистящего автомата 10 по беспроводной линии связи, и передает обработанные сигналы в центральный блок управления 50 по проводу, а также передает через антенну 42 на чистящий автомат 10 сигналы, получаемые от центрального блока управления 50.
Центральный блок управления 50 выполнен на базе обычного компьютера, архитектура которого представлена на фиг.5. Как показано на фиг.5, центральный блок управления 50 содержит центральный процессор (51, ЦП), постоянное запоминающее устройство (52, ПЗУ), оперативное запоминающее устройство (53, ОЗУ), устройство отображения информации 54, устройство ввода 55, блок памяти 56 и блок обмена информацией 57.
Блок памяти 56 содержит программу управления 56а (драйвер) чистящим автоматом, установленную в него для управления чистящим автоматом 10 и обработки сигналов, передаваемых с чистящего автомата 10.
При выполнении драйвера 56а на устройство отображения информации 54 выводится меню для установки параметров работы чистящего автомата 10, который затем отрабатывает последовательность заданий в соответствии с настройками меню, введенными пользователем. Меню позволяет выбирать режим уборки или наблюдения и имеет подпункты, соответствующие возможностям, предоставляемым настоящим изобретением, например выбор участка выполнения работы из списка, метода выполнения задания и т.п.
В предпочтительном случае меню драйвера 56а позволяет задать режим определения местоположения чистящего автомата по информации об участке выполнения работы, и в случае выбора этого режима чистящий автомат 10 отключается от внешнего зарядного устройства 30 и движется по заданному участку выполнения работы, при этом информация об участке выполнения работы создается и запоминается с использованием сигналов, обнаруженных и переданных бесконтактными выключателями 12с. Создание и запоминание информации об участке выполнения работы может также выполняться в чистящем автомате 10.
Драйвер 56а может активизировать чистящий автомат для выполнения заданной работы автоматически при наступлении заданного времени работы или по команде, введенной пользователем через устройство ввода 55.
Устройство управления 18 чистящего автомата 10 управляет устройством привода 15 и/или устройством 11 сбора удаляемых загрязнений в соответствии с информацией, переданной драйвером 56а через релейный узел беспроводной связи 41. Устройство управления 18 также передает снимаемое камерой 13 изображение на центральный блок управления 50 через релейный узел беспроводной связи 41.
Если в процессе управления от чистящего автомата 10 через релейный узел беспроводной связи 41 поступит сигнал о необходимости подзарядки аккумулятора, драйвер 56а рассчитает траекторию возврата к внешнему зарядному устройству 30, используя хранимую в блоке памяти 56 информацию о расположении металлических полос на участке выполнения работы, и даст команду чистящему автомату 10 на возврат к внешнему зарядному устройству 30 по рассчитанной траектории.
Более подробно процедура управления чистящим автоматом 10 описывается ниже с пояснениями на фиг.7 и 8.
Сначала создается и запоминается карта-схема расположения металлических полос (этап S100).
Создание этой карты-схемы происходит во время настройки пользователем функций чистящего автомата 10 для работы или когда пользователь выбирает режим определения местоположения по информации об участке выполнения работы в процессе обновления этой информации. Кроме того, карта-схема может автоматически вызываться каждый раз при отключении чистящего автомата 10 от внешнего зарядного устройства 30.
Затем определяется факт наличия или отсутствия сигнала на выполнение работы (этап S110).
Если установлено, что сигнал на выполнение работы поступил, выполняется расчет маршрута движения чистящего автомата для выполнения заданной работы с использованием запомненной информации о расположении металлических полос на участке выполнения работы (этап S120).
Затем чистящий автомат 10 движется по рассчитанной траектории (этап S130).
Определение пути движения чистящего автомата выполняется из расчета, что бесконтактный выключатель 12с3, находящийся посредине, должен находиться напротив металлической полосы 65. Чистящий автомат 10, движущийся без отклонения от заданного пути, условно обозначен на фиг.7 кружком "А".
Далее выясняется, получен ли сигнал обнаружения металлической полосы только от одного из крайних бесконтактных выключателей 12с1 и 12с5 (этап S140).
Если да, т.е. если чистящий автомат 10 отклонился от нормального пути и находится в положении, условно обозначенном на фиг.7 кружками "В" и "С", устанавливается, что чистящий автомат 10 достиг допустимого отклонения от траектории движения. В этом случае чистящий автомат 10 временно останавливается, и выполняется расчет параметров коррекции траектории для возврата чистящего автомата 10 на нормальную траекторию.
В частности, находясь в положении "В", временно остановленный чистящий автомат 10 поворачивается на 90° влево, продвигается вперед на расстояние, соответствующее расстоянию между средним бесконтактным выключателем 12с3 и крайним бесконтактным выключателем 12с1, и затем поворачивается на 90° вправо, устанавливаясь по курсу заданного движения (как показано стрелкой). Таким образом, средний бесконтактный выключатель 12с3 устанавливается поверх металлической полосы. Расчет параметров коррекции траектории для изменения направления и расстояния прямолинейного движения чистящего автомата 10 производится на этапе S150.
Находясь в положении, соответствующем кружку "С" на фиг.7, временно остановленный чистящий автомат 10 поворачивается на 90° вправо, продвигается вперед на расстояние, соответствующее расстоянию между средним бесконтактным выключателем 12с3 и крайним бесконтактным выключателем 12с5, а затем поворачивается на 90° влево. Таким образом, средний бесконтактный выключатель 12с3 устанавливается поверх металлической полосы 61, а расчет параметров коррекции траектории для изменения направления и расстояния прямолинейного движения производится на этапе S150.
Затем в соответствии с рассчитанными параметрами коррекции траектории устройство привода 15 чистящего автомата 10 возвращает чистящий автомат 10 на нормальную траекторию движения и далее направляет его к следующему заданному участку выполнения работы.
Между тем, если чистящий автомат 10 оказался в положении, соответствующем кружкам "D" и "Е" на фиг.7, т.е. если сигнал обнаружения металлической полосы получен только от бесконтактных выключателей 12с2, 12с4, расположенных между крайними бесконтактными выключателями 12с1 и 12с5 и средним бесконтактным выключателем 12с3, то коррекция траектории выполняется путем изменения скорости вращения левого или правого колес соответственно.
По окончании вышеописанного процесса устанавливается факт завершения работы (этап S170), и работа системы соответственно заканчивается.
Как указано выше, применение предложенных чистящего автомата 10, робототехнической системы с его использованием и способа управления им облегчает определение местоположения чистящего автомата 10 и определение маршрута его движения по участку выполнения работы. В результате повышается производительность чистящего автомата 10 и одновременно отпадает необходимость отработки им сложных алгоритмов управления.
Хотя выше был описан именно предпочтительный вариант изобретения, специалисту должно быть понятно, что возможности осуществления изобретения этим вариантом не ограничены. В рамках патентных притязаний, изложенных в прилагаемой формуле изобретения, возможны различные изменения и частные варианты изобретения.
Чистящий автомат, способ управления им и робототехническая система могут быть использованы для автоматического удаления с очищаемой поверхности на заданном участке частиц грязи и пыли без участия оператора с обеспечением точности определения местоположения автомата без использования сложных алгоритмов определения местоположения. Чистящий автомат для выполнения уборки в режиме беспроводной связи с внешним устройством содержит устройство привода нескольких колес, установленных на корпусе чистящего автомата, устройство сбора удаляемых загрязнений, установленное на корпусе для удаления и сбора загрязнений с поверхности пола на участке выполнения работы, группу бесконтактных выключателей, расположенных на обращенной к поверхности пола нижней поверхности корпуса на заданном расстоянии друг от друга для обнаружения присутствия металлического элемента со стороны поверхности пола, и устройство управления. Устройство управления рассчитывает расстояние и траекторию движения с использованием рассчитанных сигналов, получаемых от бесконтактных выключателей во время движения чистящего автомата, и управляет устройством привода с обеспечением выполнения устройством привода заданной работы с использованием рассчитанной траектории. Число бесконтактных выключателей является нечетным, и они расположены в ряд вдоль линии, соединяющей оси колес, расположенных напротив друг друга. Робототехническая система для уборки содержит чистящий автомат, выполняющий уборку в режиме беспроводной связи с внешним устройством и имеющий группу бесконтактных выключателей, расположенных в ряд на нижней поверхности корпуса, и направляющую плиту, расположенную на полу на участке выполнения работы и содержащую металлические полосы, расположенные по заданной схеме с возможностью их обнаружения бесконтактными выключателями. Способ управления чистящим автоматом, определяющим свое местоположение с использованием сигналов обнаружения металлический полос, расположенных по заданной схеме на поверхности пола участка выполнения работы, группой бесконтактных выключателей, расположенных на нижней поверхности корпуса чистящего автомата на заданном расстоянии друг от друга, включает стадии создания и запоминания карты-схемы расположения металлических полос во время перемещения чистящего автомата по участку выполнения работы, при наличии сигнала на выполнение работы стадию определения местоположения чистящего автомата путем сравнения карты-схемы с сигналом обнаружения металлической полосы бесконтактными выключателями и расчета маршрута движения из точки определенного местоположения в заданную точку и стадию перемещения чистящего автомата по рассчитанному маршруту его движения. При получении сигнала обнаружения металлической полосы от крайних бесконтактных выключателей во время движения чистящего автомата движение временно прекращают, рассчитывают параметры коррекции траектории, включающие в себя изменение направления движения и прямолинейное перемещение чистящего автомата, требуемые для обнаружения металлической полосы средними бесконечными выключателями, чистящий автомат перемещают в соответствии с параметрами коррекции траектории, и при обнаружении металлической полосы средним бесконтактным выключателем продолжают управление работой чистящего автомата. 3 с. и 5 з.п. ф-лы, 8 ил.
| US 5109566 А, 05.05.1992 | |||
| US 5189612 А, 23.02.1993 | |||
| DE 2059659 А, 15.06.1972 | |||
| Пожарный двухцилиндровый насос | 0 |
|
SU90A1 |
| US 5341540 А, 30.08.1994 | |||
| US 3010129 А, 28.11.1961 | |||
| ШУМОПОНИЖАЮЩИЙ ДЕМПФЕР КОЛЕСА ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2690626C2 |
| Устройство для прокладки маршрута адаптивного промышленного робота | 1980 |
|
SU882734A1 |
| DE 4340771 A1, 15.12.1994. | |||

