Изобретение относится к области летательных аппаратов и может быть использовано для перемещения людей и грузов, в том числе и в пределах городов, как безопасный летательный аппарат (далее - ЛА) у которого нет открытого несущего воздушного винта.
Рабочий винт расположен внутри, по сути, неподвижного корпуса имеющего габариты ∅ 1,4 м и высота ~ 0,3 м, что обеспечивает его возможность объединения с легковым автомобилем и его дальнейшую безопасную эксплуатацию в условиях города, т.к. нет опасности зацепиться вращающимся винтом за посторонние предметы, не требуется оборудование специальных взлетно-посадочных зон. Объединение ЛА с автомобилем по существу позволяет получить новый продукт, который может найти широкое применение на рынке товаров и услуг. Использование разработанных в настоящее время двигателей в предлагаемом устройстве делает ЛА по цене соизмеримым с обычным автомобилем.
Такое выполнение ЛА позволяет уменьшить его габариты и упростить конструкцию и, как следствие, позволяет скомплексировать его с легковым автомобилем.
Известны летательные аппараты с вертикальным взлетом - посадкой (вертолеты) (см. Б.Н. Юрьев "Аэродинамический расчет вертолетов" Оборонгиз. М. 1956 г.). Несмотря на широкое использование этих устройств, они обладают тем недостатком, что они используют значительные размеры лопастей (несущие винты). Требование получить большую тягу заставляет конструкторов применять диаметры доходящие до 37 м (обычно 12÷25 м) (см. книгу Б.Н. Юрьева, стр. 51). Использование таких вертолетов в условиях города небезопасно, к тому же их изготовление требует значительных материальных затрат.
Известен ряд летательных аппаратов, типа летающая тарелка габариты которых значительно меньше вертолетов патент RU 2071441 В 64 с 27/20 1997 г., патент Япония №57-61640 В64С 27/20 1982 г., заявка ФРГ № OS 34491 В 34/с 1986 г., аэродинамический движитель RU 2153442 В64С 27/20 С2 1998 г., патент RU 2560172 С.
Наиболее близко по своей технической сущности к предлагаемому устройству (прототип) является устройство описанное в патенте RU 2652423 С1 2018 г. В этом летательном аппарате с вертикальном взлетом и посадкой содержащий двигатель с валом, корпус, рабочее колесо, редуктор, рабочее колесо конструктивно соединено с диском и выполнено оно с двумя лопаточными венцами, один из лопаточных венцов расположен в кольце сформированным обечайкой несущего винта и внешним краем диска, а другой расположен под внутренним краем лопастей несущего винта, редуктор соединен с рабочим колесом и валом двигателя и обеспечивает вращение рабочего колеса в противоположную сторону относительно несущего винта, установленного с возможностью вращения, внешние края лопастей несущего винта соединены с обечайкой, а внутренние - со стаканом, который соединен с валом двигателя, диск, расположенный под несущим винтом, наружный край которого выполнен в виде части тора и формирующий с обечайкой несущего винта кольцевую зону, лопасти несущего винта имеют аэродинамический профиль и установлены под углом 8-10 градусов к плоскости диска, лопасти несущего винта установлены со скважностью между собой, n - преобразователи (трансформеры) расположенные равномерно под сформированным кольцом равномерно заполняя его, а выходы каждого из них имеют квадратное сечение равное по площади их входам и установлены они неподвижно относительно вращающейся обечайки с несущим винтом, n-воздуховоды вход каждого из которых конструктивно соединен с выходом одного из n-преобразователей (трансформеров), а их выходы объединены в четыре группы, каждая из которых образует плотную матрицу укладки, заключенную в тубус, четыре блока управления, каждый из блоков управления выполнен в виде углового патрубка и механизма его перемещения, три из четырех выходов плотных матриц укладки пространственно разнесены между собой по основанию ЛА и расположены один в головной части ЛА, а два других в задней его части, четвертый блок управления расположен над тубусами установленными в задней части ЛА, выполнен он из двух взаимно-перпендикулярных угловых патрубков и управляющего руля, один из угловых патрубков ориентирован по строке плотной матрицы укладки воздуховодов, а другой - по столбцу, с возможность возвратно-поступательного перемещения в диапазоне одного ряда или столбца плотной матрицы укладки воздуховодов, а управляющий руль выполнен в виде жалюзи установленной вертикально с возможностью углового поворота в диапазоне ±45 градусов, два тубуса расположенные в задней части ЛА выполнены составными из двух частей, разделенных эластичной вставкой, обе эластичные вставки выполнены в виде пустотелого шарового шарнира имеющего подвижную и неподвижную части, с каждой из которых соединены соответственно по одной из двух частей тубуса, одна из частей каждого тубуса установлена неподвижно, а другая с возможностью углового отклонения в вертикальной и горизонтальной плоскостях и механизма углового отклонения каждой подвижной части тубуса.
Недостатком летательного аппарата, описанного в патенте RU 2652423 С1, является ненадежность и эффективность его работы, что требует внесения изменений и уточнений в составные части предложенной схемы построения ЛА.
Эффективность работы ЛА обусловлена количеством воздушной массы канализируемой через ЛА и ее скоростью, с которой эта масса канализируется.
Повышение надежности работы ЛА во многом определяется относительной независимостью воздушных потоков от лопастей несущего винта и воздушного потока формируемого внутренним лопаточным венцом на входе во внешний лопаточный венец, расположенный на периферии рабочего колеса.
Для разведения, по возможности, этих потоков рабочее колесо со вспомогательной входной системой само формирует и канализирует через себя воздушный поток, который в основном и участвует в получении кинетической энергии воздушной массы, участвующей в перемещении ЛА в пространстве. Для этого внутренний лопаточный венец рабочего колеса развернут по отношению к внешнему лопаточному венцу на 180° и может быть максимально приближен к нему.
Повышение эффективности использования ЛА обусловлено скоростью его перемещения в пространстве, которая достигается увеличением скорости канализируемых пучков воздушной массы на выходе тубусов ЛА, что позволяет существенно увеличить скорость перемещения ЛА в пространстве.
Эта задача решается в предлагаемом аппарате благодаря тому, что с целью повышения надежности и эффективности работы ЛА он снабжен вспомогательной системой соединенной с верхом рабочего колеса, пустотелой тонкостенной камерой неподвижно установленной в верхней части ЛА под рабочим колесом, двумя воздухозаборниками расположенными с противоположных сторон корпуса ЛА и соединенных с тонкостенной камерой, внутренний лопаточный венец расположен внутри рабочего колеса и ориентирован таким образом, что направление воздушного потока прошедшего через него развернуто по отношению к направлению потока от внешнего лопаточного венца на 180°, внутренний лопаточный венец максимально приближен к внешнему лопаточному венцу, вспомогательная система обеспечивает отклонение направления воздушных потоков от внутреннего лопаточного венца по радиусу рабочего колеса в сторону внешнего лопаточного венца, площади обеих частей тубуса, соединенных с пустотелым шаровым шарниром имеют разные сечения, площадь подвижной части тубуса А2 меньше площади неподвижной части тубуса А1, тонкостенная пустотелая камера выполнена со свободным кольцом в верхней своей части размеры которого равны диаметрам внутреннего лопаточного венца.
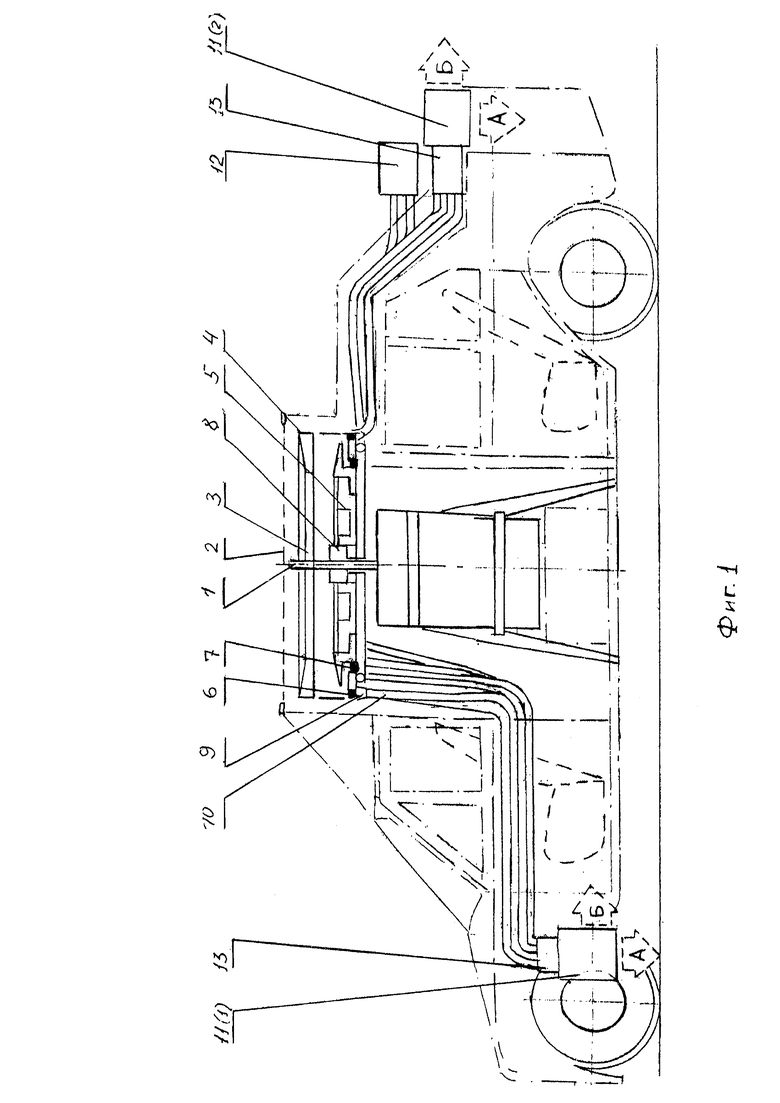
На фиг. 1 дан продольный разрез предлагаемого устройства и его возможная компоновка в легковом автомобиле.
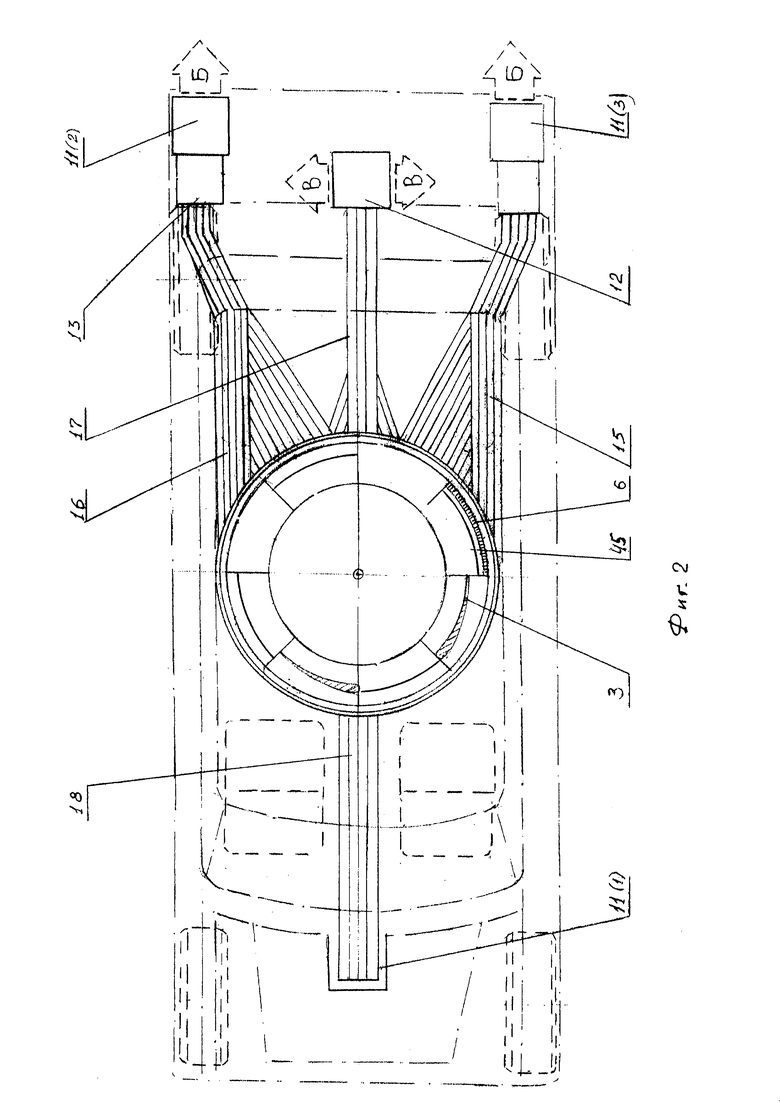
На фиг. 2 - приведен вид сверху.
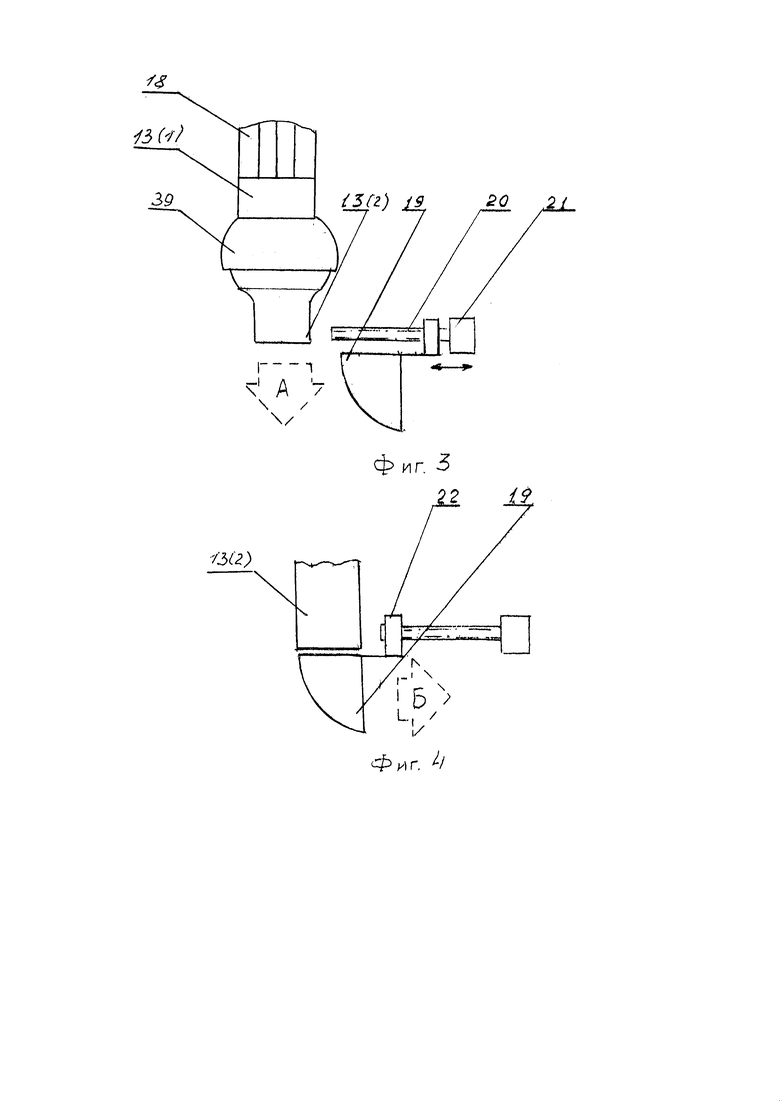
На фиг. 3 - приведен вид сбоку блока управления расположенного в головной части летательного аппарата (ЛА).
На фиг. 4 - показано положение углового патрубка по отношению к матрице воздуховодов при перемещении ЛА по курсу.
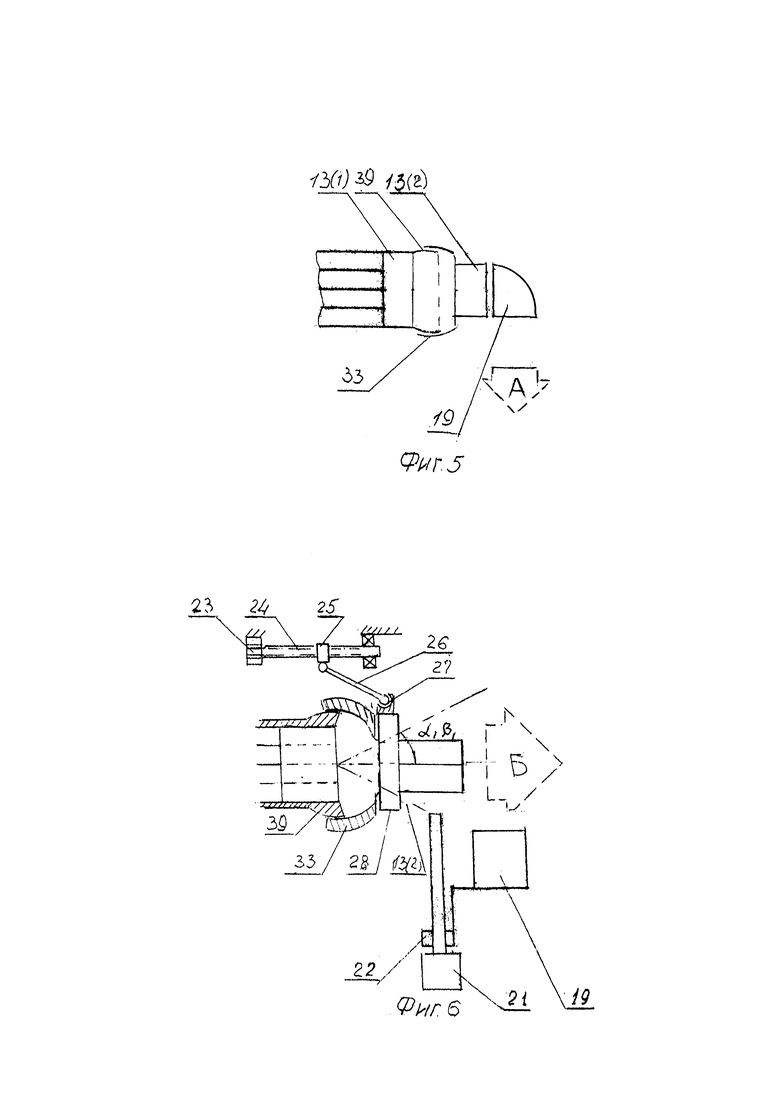
На фиг. 5 показан вид сбоку одного из 2-х блоков управления расположенных в задней части ЛА, где показано положение углового патрубка по отношению к тубусу соединенного с концом воздуховодов уложенных в плотную матрицу. Режим работы ЛА - взлет-посадка.
На фиг. 6 - показано положение углового патрубка в задней части ЛА при перемещении его по курсу. Вид в горизонтальной плоскости.
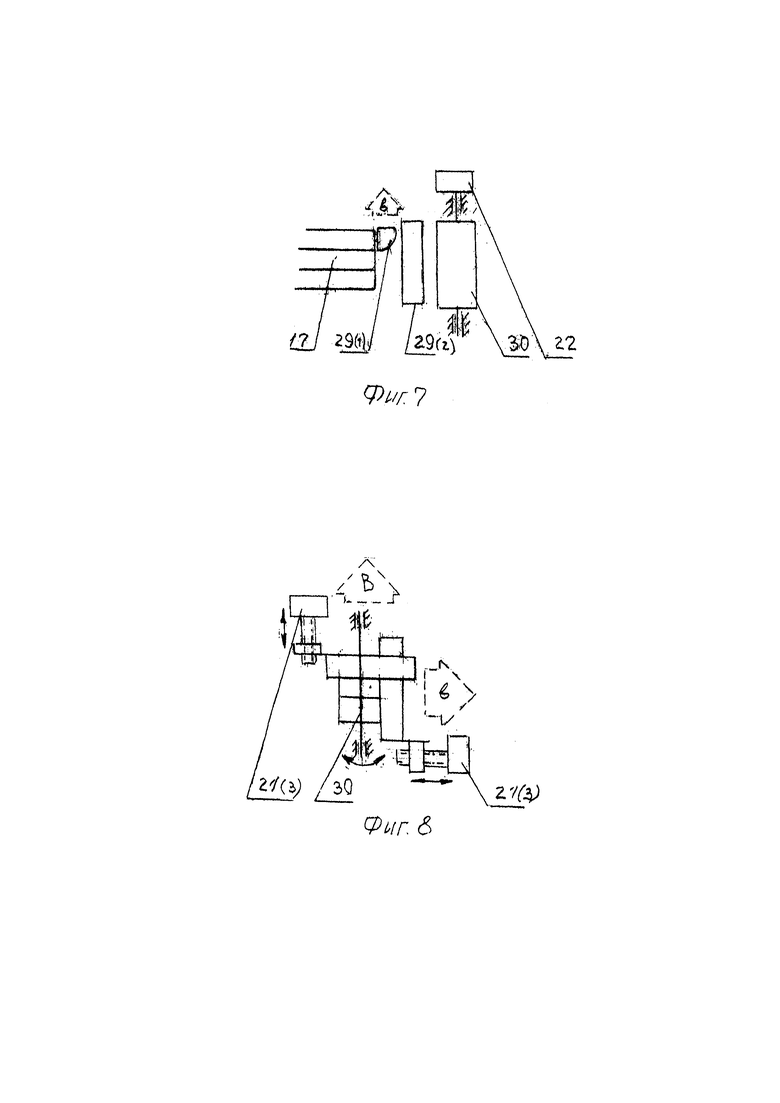
На фиг. 7, 8 показаны положение двух угловых патрубков для стабилизации пространственного положения ЛА и управляющий руль, обеспечивающий угловое перемещение ЛА по курсу. В двух взаимно перпендикулярных плоскостях.
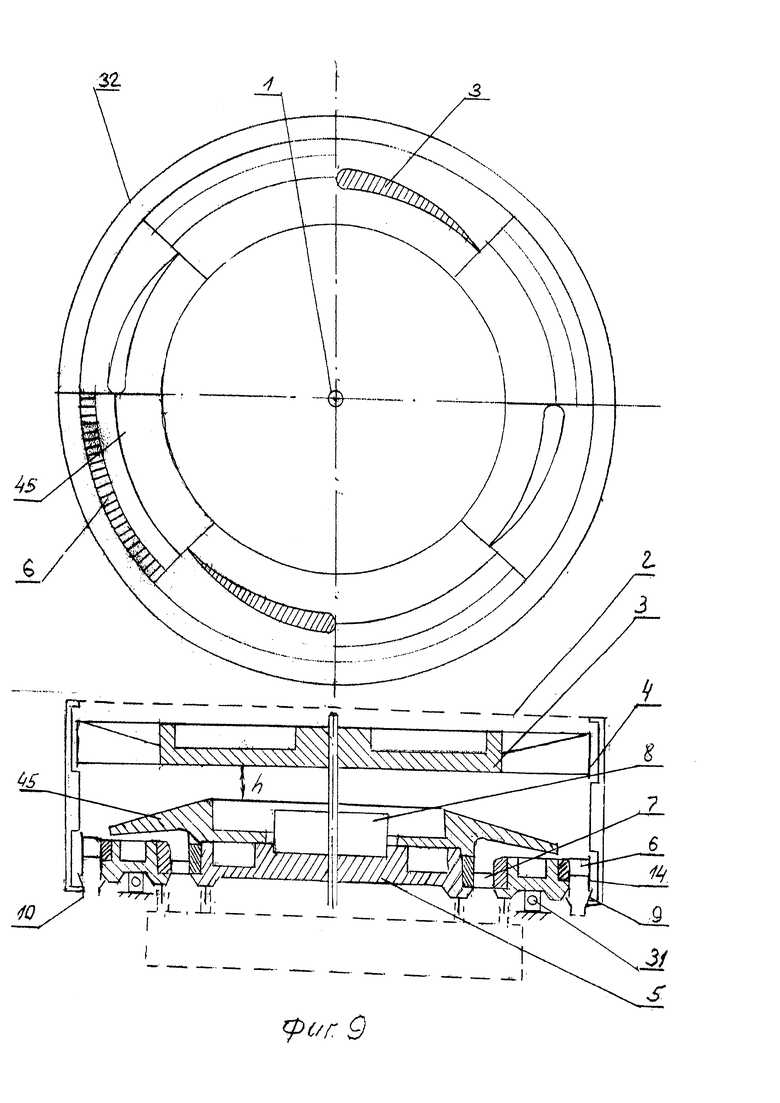
На фиг. 9 в увеличенном масштабе показано взаимное расположение несущего винта и рабочего колеса с редуктором и двухлопаточным венцом.
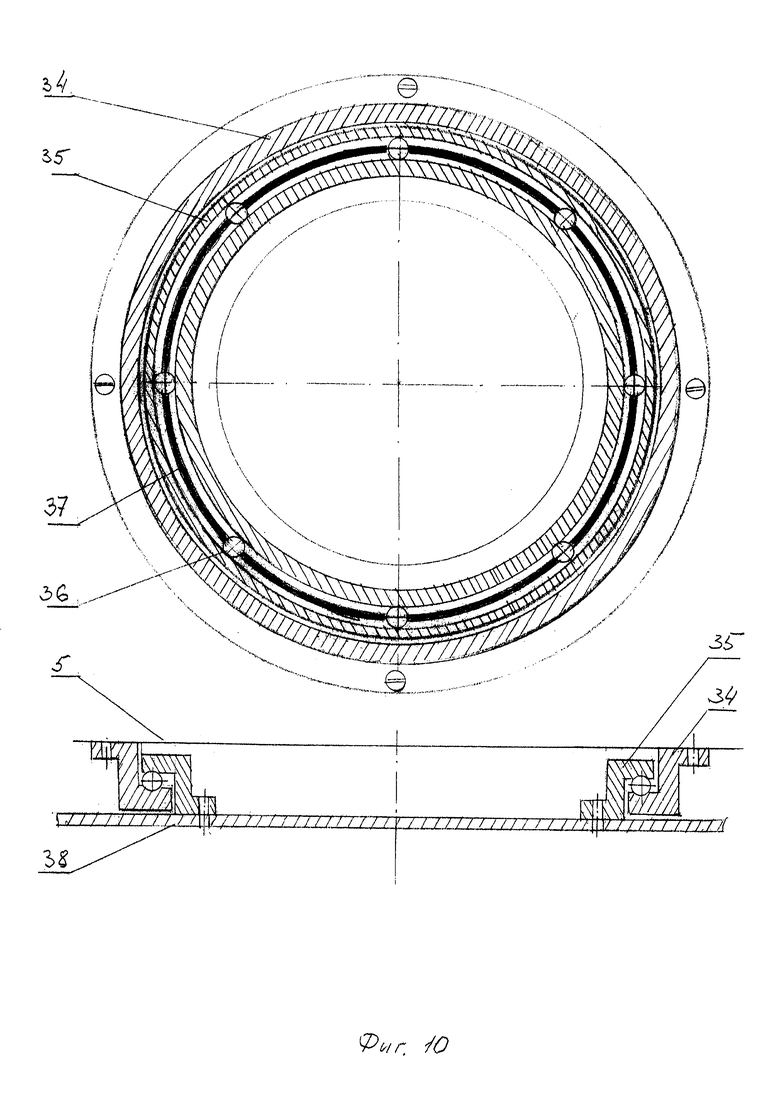
На фиг. 10 показан шариковый стабилизатор пространственного положения рабочего колеса с принудительным движением сепаратора.
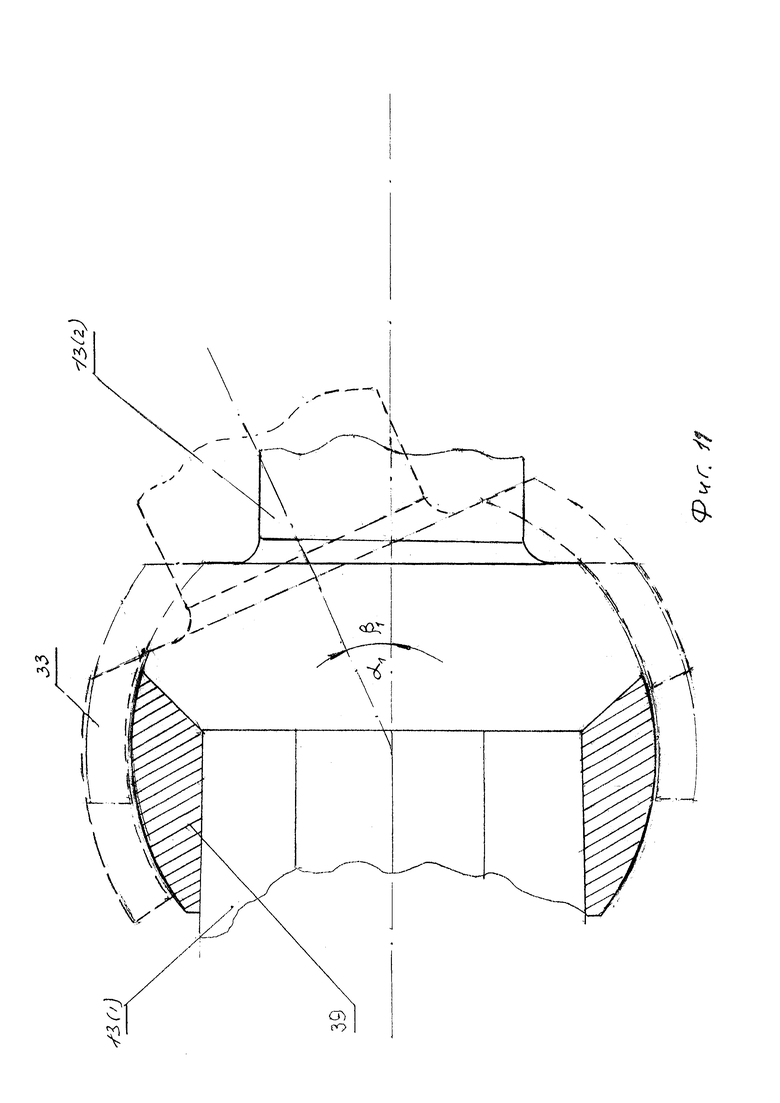
На фиг. 11 приведен вариант возможного построения шарового пустотелого шарнира, две части которого соединены с двумя частями одного из тубусов, расположенного в задней части ЛА.
На внешнюю поверхность неподвижной части шарового шарнира 39 и на внутреннюю поверхность подвижной его части могут быть нанесены антифрикционные пленки, обладающие низким коэффициентом трения скольжения.
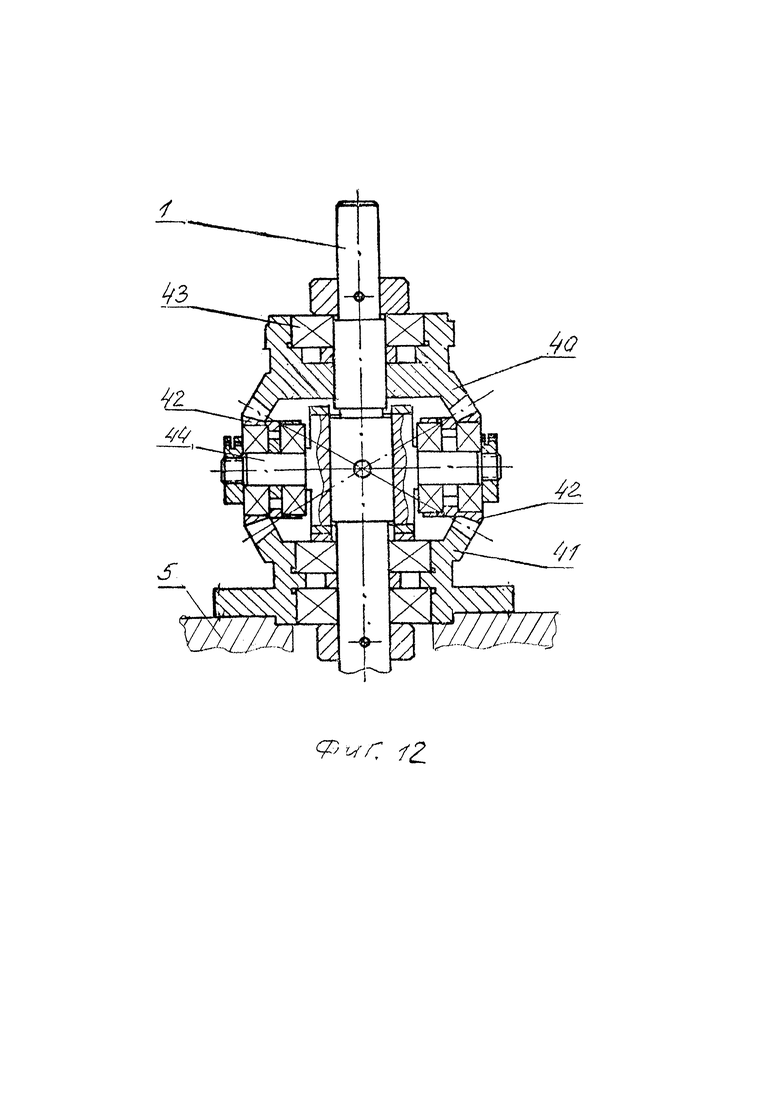
На фиг. 12 показан один из возможных вариантов редуктора, обеспечивающего вращение рабочего колеса в обратном направлении относительно несущего винта, соединенного с валом.
Устройство состоит из рабочего двигателя с валом 1, на входе которого расположена защитная сетка 2 для предотвращения попадания на несущий винт посторонних предметов.
Несущий винт 3, образованный из k-лопастей, имеющих аэродинамический профиль и установленных под углом 8÷10 градусов к плоскости диска, соединенного с рабочим колесом 5.
Лопасти несущего винта выполнены в виде кольцевых сегментов фиг. 9, заключенных между обечайкой 4 с внешней стороны и стаканом с внутренней. Стакан соединен с валом 1. Проекции лопастей несущего винта 3 на диск (рабочее колесо) имеют скважность между собой. В частности скважность, показанная на фиг. 9 равна длине лопасти несущего винта. Значение скважности может быть иной по отношению к ширине лопасти несущего винта, обеспечивая его подъемную силу. Рабочее колесо 5 выполнено с двумя лопаточными венцами 6 и 7 (фиг. 1 и фиг. 9). Один из двух лопаточных венцов (внешний) расположен в зазоре, образованном диском, соединенным с рабочим колесом и корпусом аппарата, являющимся продолжением обечайки несущего винта. Другой лопаточный венец 7 (внутренний) рабочего колеса расположен внутри частично пустотелого рабочего колеса (Фиг. 9), таким образом, что отклоняемый им воздушный поток направлен вертикально вверх. Т.е. воздушные потоки от обоих лопаточных венцов идут в противоположных направлениях. Конструкция рабочего колеса и вспомогательной системы 45 (фиг. 9) позволяет отклонить воздушный поток, прошедший через лопаточный венец 7 по горизонтали (по радиусу) в сторону внешнего лопаточного венца. Это способствует как повышению результирующей скорости воздушного потока на входе в трансформеры (преобразователи), так и стабильному заполнению всего кольцевого зазора воздушной массой.
Высота лопаток внутреннего лопаточного венца, равна 35÷40 мм, а их длина ~ 50 мм. Лопатка представляет собой аэродинамический профиль.
Густота решетки (количество лопаток) обоих лопаточных венцов, угол установки профиля лопатки и его конфигурация определяется аэродинамическим расчетом исходя из обеспечения производительности устройства (максимального количества канализируемого воздушного потока) и скорости его на входе в трансформеры. Для расчетов принято значение числа лопаток (густота) в каждом из венцов, равным 200. Во внешнем венце профиль лопатки выбирается из необходимости отклонения воздушного потока, при вращающемся колесе, вниз в сторону трансформеров 9, расположенных под ним. Внешний край этого венца может быть соединен с тонкостенным обручем 14 (фиг. 9). С внешним краем рабочего колеса соединена мембрана вдоль всего края рабочего колеса, который совместно с тонкостенным обручем 14 формирует входную зону в неподвижно установленные трансформеры (преобразователи). Возможно создание уплотнения между подвижными и неподвижными частями.
Трансформер (преобразователь) 9 выполнен из тонкостенной полированной стальной ленты толщиной 0,6 мм (например, по ГОСТ 21997-76). Входное отверстие которого равно 75 мм (по среднему радиусу), а ширина 33,4 мм. Т.е. площадь входного отверстия трансформера равна 2505 мм2 и, следовательно, выходной квадрат трансформера равен 50×50 мм, что при среднем диаметре зазора в котором располагаются трансформеры, равном 1,365 м, позволяет при их плотной укладке между собой (на общей окружности  =4,286 м) разместить 57 шт. Каждый из n-преобразователей (трансформеров) позволяет преобразовать 1/n часть площади кольца в квадрат, площадь которого равна 1/n площади кольца. Каждый из выходов преобразователей 9 соединен с одним из воздуховодов 10 (фиг. 1). Каждый из воздуховодов входит в одну из четырех плотных матриц укладки. По 16 штук при плотной их укладке (4×4) для трех групп плотных матриц 15, 16, 18 (фиг. 2) и одной из девяти штук при плотной укладке (3×3) 17 (фиг. 2).
=4,286 м) разместить 57 шт. Каждый из n-преобразователей (трансформеров) позволяет преобразовать 1/n часть площади кольца в квадрат, площадь которого равна 1/n площади кольца. Каждый из выходов преобразователей 9 соединен с одним из воздуховодов 10 (фиг. 1). Каждый из воздуховодов входит в одну из четырех плотных матриц укладки. По 16 штук при плотной их укладке (4×4) для трех групп плотных матриц 15, 16, 18 (фиг. 2) и одной из девяти штук при плотной укладке (3×3) 17 (фиг. 2).
Внутренние поверхности воздуховодов 10 должны иметь полированную (зеркальную) поверхность, что способствует снижению потерь скорости воздушной массы при ее прохождению по ним. (Например, шероховатость поверхности применительно к ГОСТ 2789-59 по классу чистоты 13 или 14).
С каждой плотной матрицы укладки соединен один из четырех блоков управления 11(1), 11(2), 11(13) и 12. Три из которых 11(1), 11(2), 11(13) пространственно разнесены по основанию ЛА (фиг. 2), а четвертый 12 расположен над блоками управления 11(2) и 11(13) в задней части ЛА.
Важной частью нормального функционирования ЛА является обеспечение стабильного пространственного положения рабочего колеса, т.к. вращающиеся его части, в частности край 14 лопаточного венца 6 вращается, по сути, внутри неподвижной части трансформеров 9 (преобразователей). Края каждого из трансформеров (вдоль внешнего и внутреннего диаметров) выполнены с ушками, за которые они крепятся к неподвижным кольцам. Зазор между подвижными и неподвижными частями может составлять малую величину (~ 1-2 мм).
В предложенном ЛА стабильность рабочего колеса достигается использованием шарикового стабилизатора пространственного положения рабочего колеса (фиг. 10). Одна из двух направляющих шарикового стабилизатора 34 соединена с низом рабочего колеса, а другая 35 - с базовым кольцом 38, соединенного с корпусом автомобиля. Базовое кольцо имеет отшлифованную плоскую поверхность, необходимой жесткости, обеспечивая пространственную стабилизацию вращающегося по ней шарикового стабилизатора (34, 35). Шариковый стабилизатор собран из условия обеспечения минимальных биений корпуса рабочего колеса (~ 50 мкм). На фиг. 12 показан один из возможных вариантов построения редуктора, обеспечивающего противоположное направление вращения рабочего колеса, относительно несущего винта, соединенного с валом рабочего двигателя. Редуктор содержит: коническую шестерню 40, соединенную с валом, две конические шестеренки 42 (сателлиты), выходную коническую шестерню, имеющую вращение в обратном направлении относительно вала (передаточное число i=-1) и скрепленное с ней рабочее колесо 5. На фиг. 12 также показаны: вспомогательная ось 44, на которой установлены сателлиты, и шарикоподшипники 43.
Функционирование ЛА связано с необходимостью его пространственного перемещения в воздушной среде. Это обеспечивается за счет возможности отклонения канализируемых воздушных потоков в задней части ЛА в двух взаимно перпендикулярных плоскостях (по горизонту α1 и по вертикали β1). Механизм углового перемещения обеспечивает отклонение подвижной части тубуса 13(2) фиг. 11, конструктивно соединенной с подвижной частью пустотелого шарового шарнира 33 фиг. 11 как в горизонтальной плоскости в диапазоне углов, равных α1=±25°, так и вертикальной плоскости в тех же углах β1=±25°.
Для реализации углового отклонения в вертикальной плоскости ЛА снабжен корытцем, охватывающем с нижней стороны шаровой шарнир (на чертеже не показан). В плоскости, содержащей центр вращения шарнира, ниже ее в цапфах установлен вал, конструктивно соединенный с корытцем, с возможностью его поворота, а на расстоянии ~ 100 мм от вала вертикально расположен винт. Один конец винта закреплен в шарикоподшипнике, соединенного с корпусом аппарата, а другой в роторе двигателя безредукторного моментного (ДБМ). Статор ДБМ закреплен неподвижно на корпусе ЛА. При вращении винта по нему перемещается гайка (каретка) с которой соединена цапфа. Внутри цапфы расположен вал, имеющий скользящую посадку. Толкатель одним из двух концов установлен в цапфе винта, а другим концом он соединен с шаровой опорой, установленной на корытце. При перемещении гайки (каретки) при вращении винта вместе с ней перемещается толкатель, обеспечивая поворот корытца, а вместе с ней подвижную часть тубуса, обеспечивая тем самым отклонение воздушного пучка прошедшего через него в вертикальной плоскости.
Аналогично работает и механизм углового перемещения подвижного тубуса в горизонтальной плоскости. На подвижной части тубуса установлена рамка, а параллельно тубусу расположен винт 24 (фиг. 6). С одной стороны он закреплен в шарикоподшипнике, а с другой в роторе двигателя (ДБМ). Статор двигателя 23 и шарикоподшипник закреплены на корытце. Вдоль винта при его вращении перемещается гайка (каретка) 25 с которой соединена цапфа, внутри которой расположен вал со скользящей посадкой. К валу присоединен толкатель 26, который другим концом соединен с шаровой опорой 27, установленной на рамке 28. При вращении винта 24 по нему перемещается гайка (каретка) 25, а вместе с ней перемещается толкатель 26, который через шаровую опору 27 отклоняет рамку 28 и связанную с ней подвижную часть тубуса 13(2), в результате чего происходит отклонение воздушного пучка прошедшего через него. В горизонтальной плоскости пучок отклоняется в диапазоне углов α1=±25°. Для обеспечения нормального функционирования ЛА в горизонтальной плоскости аппарат может быть укомплектован вторым механизмом угловых перемещений, аналогичным первому, установленным с противоположной стороны рамки и скрепленный с корытцем. Особенностью работы ЛА при одновременном использовании двух механизмов угловых перемещений (одного из двух блоков управления, например, 11(2)) является перемещение гаек (кареток) по соответствующим винта в противоположных направлениях. Для другого блока управления, установленного в задней части ЛА, например 11(3), используют аналогичный механизм, описанный выше для блока 11(2).
Воздушные потоки от блоков 11(2), 11(3) могут отклоняться независимо друг от друга в обоих плоскостях (в вертикальной и горизонтально), расширяя возможности перемещения транспортного средства в воздушной среде.
На фиг. 7 один из двух угловых патрубков 29(2) установлен вдоль строки плотной матрицы укладки воздуховодов 17 с возможностью поступательного перемещения вверх-вниз, отклоняя воздушный поток вверх, а другой 29(1) - вдоль столбца плотной матрицы воздуховодов с возможностью перемещения влево-вправо, отклоняя перехваченные пучки в стороны по горизонтали. Угловые патрубки 29(1) и 29(2) перемещаются соответствующим механизмом перемещения с помощью приводов 21(3). Линейные перемещения угловых патрубков проводят в диапазоне от 0÷50 мм, перекрывая один ряд воздуховодов (строка или столбец).
На выходе воздуховодов 17 установлен управляющий руль 30 выполненный в виде одиночной жалюзи, ребро которой расположено вдоль границы одного из столбцов плотной матрицы укладки воздуховодов. Поворот управляющего руля осуществляется с помощью привода 22, который поворачивает руль в диапазоне ±45 градусов, обеспечивая отклонение части воздушного потока не перехваченной угловыми патрубками.
Угловой патрубок 29(2) отклоняя часть воздушного потока вверх компенсирует подъемную силу создаваемую несущим рабочим винтом, а угловой патрубок 29(1), отклоняющий часть воздушного потока по горизонтали, компенсирует инерционное вращение ЛА вокруг оси двигателя (собственной оси) вызванную работающим несущим винтом, тем самым стабилизирует пространственное положение ЛА. На фиг. 7 с помощью стрелок В и в показаны направления воздушных потоков при их перехватывании с помощью угловых патрубков 29(1) и 29(2).
Угловые патрубки 19 установлены с возможностью шагового (дискретного) их перемещения, равного ширине одного столбца матрицы плотной укладки воздуховодов, тем самым используя воздушные потоки прошедшие соответствующие блоки управления 11(1), 11(2), 11(3) одновременно как для подъема ЛА, так и для его перемещения по курсу.
Устройство работает следующим образом. Набегающий воздушный поток на винт после его прохождения через несущий винт отклоняют на его периферию. Несущим винтом и краем рабочего колеса расположенным под винтом формируют кольцевой зазор. Заполняют этим воздушным потоком весь кольцевой зазор. Весь воздушный поток прошедший кольцевой зазор перехватывают с помощью n-трансформеров расположенных за кольцевым зазором и n гибких воздуховодов. Вход каждого из воздуховодов соединен с выходом одного из n-трансформеров. Объединяют все воздуховоды в четыре группы плотных матриц на их выходе (Фиг. 2, позиции 15, 16, 17, 18).
Пространственно разносят три группы плотных матриц вдоль основания ЛА, располагая одну из групп впереди ЛА, а две другие в его задней части на равных расстояниях от оси вращения винта, формируя три точки опоры ЛА, что делает его устойчивым при взлете - посадке (фиг. 1, фиг. 2). При взлете - посадке ЛА работает как его несущий винт, так и кинетическая энергия воздушной массы, перехваченная рабочим колесом и канализированная с помощью воздуховодов.
Скорость подъема ЛА и пространственного его перемещения обеспечивается частотой вращения двигателя.
Перемещение ЛА по курсу обеспечивается за счет кинетической энергии канализируемого воздушного потока с помощью трех блоков управления отклоняющих воздушные потоки вдоль строительной оси ЛА после из прохождения через соответствующие три плотные матрицы воздуховодов. Четвертый блок управления обеспечивает пространственную стабилизация ЛА, т.е. в предложенном устройстве отсутствует хвостовая часть присущая традиционным вертолетам, что делает его компактным.
Воздушная масса перехваченная внешним лопаточным венцом 6 рабочего колеса 5 полностью заполняет все пятьдесят семь входов воздуховодов. В начальный период работы ЛА воздушные потоки, канализируемые тремя блоками воздуховодов 15, 16, 18 фиг. 2, с помощью механизмов перемещения 20, 21 обеспечивают отклонение воздушных пучков вниз фиг. 3, фиг. 5 (стрелка А). По мере нарастания скорости вращения несущего винта 4 и рабочего колеса 5 нарастает как подъемная сила винта, так и кинетическая энергия канализируемой воздушной массы, что позволяет поднять ЛА над поверхностью земли. После отрыва ЛА от земли, при определенной скорости несущего винта и рабочего колеса, появляется возможность перевести ЛА в режим перемещения его по курсу, что обеспечивается частичным или полным перемещением угловых патрубков 19 с помощью соответствующих механизмов перемещения 20, 21. Так в носовой части ЛА угловой патрубок совмещается с выходным тубусом фиг. 4, а в задней части ЛА они наоборот выводятся из выходной зоны обоих тубусов 13 соответствующими механизмами фиг. 6. Направление воздушных потоков при этом на указанных фигурах обозначены стрелкой с буквой Б. Пространственное перемещение ЛА достигается с помощью двух воздушных потоков канализируемых в задней части ЛА, имеющих возможность независимых отклонений воздушных пучков, как в горизонтальной, так и вертикальной плоскостях. Изменение скорости подъема-спуска осуществляется путем изменения скорости вращения несущего винта и рабочего колеса.
Необходимость комплексирования летательного аппарата (ЛА) с легковым автомобилем накладывают ограничение при выборе максимального диаметра несущего винта, поскольку он должен вписываться в габариты легкового автомобиля. В этом случае несущий винт будет расположен внутри корпуса автомобиля, что делает его безопасным при эксплуатации. В настоящее время известен ряд легковых автомобилей габариты верхней части кузова которых составляют ~ 1500 мм (например, ЗИЛ-117, ЗИЛ-4104). Вписаться в указанные габариты корпуса может несущий винт имеющий максимальный диаметр ~ 1,4 м. Приняв количество лопастей к равной 4, внутренний диаметр рабочего винта определяется скоростью перемещения воздушной массы в радиальном направлении и составляет 0,95 м.
Повышение надежности работы ЛА во многом определяется относительной независимостью воздушных потоков от лопастей несущего винта и воздушного потока формируемого внутренним лопаточным венцом на входе во внешний лопаточный венец, расположенный на периферии рабочего колеса.
Для разведения, по возможности, этих потоков рабочее колесо со вспомогательной входной системой 45 (фиг. 9) само формирует и канализирует через себя воздушный поток, который в основном и участвует в получении кинетической энергии воздушной массы, участвующей в перемещении ЛА в пространстве. Для этого внутренний лопаточный венец рабочего колеса развернут по отношению к внешнему лопаточному венцу на 180° и может быть максимально приближен к нему. Для выбранных параметров рабочего колеса радиус установки лопаток внутреннего лопаточного венца может быть принят, равным например 525 мм, и, как отмечалось выше, длина лопаток, равна 50 мм, а их высота 35÷40 мм и они ориентированы вдоль радиусов рабочего колеса равномерно по окружности (количество лопаток 100÷200 штук).
Как отмечалось ранее, лопатки имеют аэродинамический профиль и обеспечивают отклонение воздушного потока, прошедшего через них с помощью вспомогательной системы, вдоль радиуса рабочего колеса.
Вспомогательная входная система состоит из двух воздухозаборников расположенных с обеих сторон корпуса ЛА в верхней его части и имеющих размеры 500×150 мм. При частоте вращения рабочего колеса f=25 Гц (n=1500 об/мин) линейная скорость на выходе внутреннего лопаточного венца, равна υ=82,4 м/с. При такой скорости прокачки воздушной массы ее общее количество через два указанных воздухозаборника будет составлять объем V=13,6 м3/с.
Т.е. общий объем канализируемой воздушной массы от внутреннего лопаточного венца, равной V=13,6 м3/с, и отбрасываемой воздушной массы лопастями несущего винта, равной V=6,7 м3/с, составит V ~ 20,3 м3/с, что достаточно для нормального функционирования ЛА.
Соединение обоих лопаточных венцов, выполненных в виде отдельных элементов, с двумя частями рабочего колеса может быть реализовано с помощью сварки их и соответствующей частью рабочего колеса и укреплено при помощи шпилек (винтов) через лопасти (или соединенные с лопастями).
Оценим потенциальные возможности данного ЛА. Как отмечалось выше, эффективность его работы определяется запасенной кинетической энергией воздушной массы, канализируемой с помощью аппарата. Известно, что кинетическая энергия определяется зависимостью
где υc - суммарная линейная скорость,
m - масса воздуха, канализируемая в единицу времени.
Определим обе эти величины. Поскольку скорость является векторной величиной, а перемещение воздушной массы происходит по радиусу υрад и окружности υокр, результирующая скорость воздушного потока υc на входе в воздуховоды определиться из зависимости

где α2 - угол, образованный векторами скоростей υрад и υокр.
Поскольку движение этих скоростей происходит под прямым углом друг к другу, то указанная зависимость упрощается, т.к. cos 90°=0

Радиальная скорость складывается из центробежной скорости υц и радиальной скорости воздушной массы, создаваемой при вращении внутреннего лопаточного венца υ2Л - Направление этих скоростей происходит по радиусу, т.е. угол α2 между ними равен нулю и, следовательно, cos α2 = cos 0° = 1
Центробежная скорость определиться из зависимости
где r - начальный радиус в свободном пространстве между несущим винтом и рабочим колесом (принят равным 0,5 м),
t - время прохождения одного оборота винта при частоте вращения f=25 Гц (t=0,04 с).
Радиальная скорость, создаваемая при вращении внутреннего лопаточного венца определиться из зависимости
υ2Л=wrЛ
где w - угловая скорость на краю лопаточного венца rЛ, при максимальной частоте вращения f=25 Гц (равна 157 рад/с) rЛ=0,475 м.
Подставив указанные значения в формулу радиальной скорости получим, что она составляет υрад=91 м/с
Окружная скорость на среднем диаметре внешнего лопаточного венца rср=0,682 м составляет υокр=107 м/с, а суммарная скорость при этом, равна υc=140 м/с.
Канализируемая воздушная масса определиться из ее объема прошедшего в единицу времени и нормальной плотности воздуха ρ=1,29 кг/м3.
Объем воздушной массы определяется входной площадью всех 57 элементарных воздушных каналов и скоростью их заполнения в единицу времени. При входной площади каждого из 57 каналов 50×50 мм2 их общая площадь составит S=0,1425 м2.
При суммарной скорости υc=140 м/с за один оборот рабочего колеса (t=0,04 с) третья координата для определения объема воздушной массы составит St=υct=5,62 м
Объем канализируемой массы V за один оборот рабочего колеса составит V=0,8 м3, а общий объем канализируемой массы в единицу времени (f=25 Гц), равен V∑=20 м3, а его масса составит m=25,8 кг.
Подставив полученные значения в формулу кинетической энергии, найдем

Данная запасенная энергия позволяет перемещать ЛА с определенной скоростью. Скорость его перемещения определиться из значения
где m - масса ЛА.
Приняв массу, равной m1=2000 кг и m2=1500 кг, определим скорость перемещения ЛА для двух значений его массы.
В первом случае при m1 скорость перемещения равна υЛА=15,9 м/с, что составляет υЛА=57,2 км/ч.
Во втором случае при m2 скорость перемещения равна υЛА=18,36 м/с, что составляет υЛА=66,1 км/ч.
Увеличение скорости перемещения ЛА в пространстве может быть легко достигнута за счет повышения скорости канализируемых воздушных потоков через подвижные части тубуса (13.2).
Из гидро - и аэродинамики известно, что законы движения жидкостей справедливы и для газов, если скорость потока оказывается меньше скорости звука, поскольку в этом случае газы можно считать практически несжимаемыми. (Скорость звука в воздухе при температуре 0°С составляет 331,8 м/с).
При канализации воздушной массы через воздуховоды, пустотелый шаровой шарнир и тубусы фактически имеет место прохождение воздушной массы через различные сечения трубы. При течении по трубам, через любое сечение трубы за равные промежутки времени t должны протекать одинаковые объемы V, поскольку воздух в нашем случае практически несжимаем. Поэтому через сечение с меньшей площадью воздух (как и жидкость) проходит быстрее.
Если  - площадь сечения 1 (неподвижный тубус),
- площадь сечения 1 (неподвижный тубус),
 - площадь сечения 2 (подвижный тубус),
- площадь сечения 2 (подвижный тубус),
ν1 - скорость потока в сечении 1,
ν2 - скорость потока в сечении 2,
то уравнение потока (уравнение непрерывности) имеет вид
 .
.
Или, говоря другими словами, чем меньше сечение выходного тубуса, тем выше скорость прохождения по нему воздушной массы.
Так, например, уменьшим размеры подвижного тубуса, конструктивно связанного с пустотелым шаровым шарниром с 200×200 мм до 150×150 мм мы увеличиваем скорость выходного потока в 1,78 раза, в результате линейная скорость на выходе ЛА составляет ~ 249 м/с. При такой скорости воздушные массы ЛА с массой m1=2000 кг и m2=1500 кг будет перемещаться в пространстве в первом случае со скоростью ν1=28,3 м/с (ν1=101,8 км/ч), а во втором случае ν2=32,6 м/с (ν2=117,5 км/ч).
Представляет интерес оценить предельные скорости перемещения ЛА за счет изменения площади выходного тубуса, помня, что ее изменения ограничены скоростью звука в воздухе (νзв=331,8 м/с).
Как показывает оценка, при данной скорости размеры тубуса могут быть уменьшены до размера 130×130 мм, при этом скорость воздушного потока на выходе ЛА увеличивается в 2,37 раза и, соответственно, скорости перемещения ЛА для указанным масс m1 и m2 составят ν1=133 км/ч и ν2=154 км/ч соответственно. Дальнейшее увеличение скорости ЛА в пространстве может быть получено только путем увеличения канализируемой воздушной массы, а это требует увеличения мощности двигателя (Значение плотности воздуха ρ кг/м3 при расчетах приняты при температуре t=0 Си давлении р=101,3 кПа).
Для канализации полученной массы воздуха m=25,8 кг с указанной скоростью 140 м/с запасенная энергия составила 252840 Дж. При этом она была запасена в течение одной секунды, что эквивалентно указанной мощности в ваттах. Выразив данную мощность в лошадиных силах (1 л.с. = 736 Вт) получим необходимую мощность Р для покачивания указанной массы воздуха с полученной скоростью Р1=343,5 л.с.
Оценим необходимую мощность для выхода ЛА на его максимальную скорость.
Момент сил, действующий на несущий винт и рабочее колесо и сообщающий ему угловое ускорение ε, равен
М=J⋅ε,
где J - момент инерции.
Несущий винт и рабочее колесо могут быть представлены в качестве дисков (реальное значение может быть получено только после конструктивной проработки). Величина J может быть найдена из зависимости
где m - масса диска,
r - радиус диска.
Оба вращаемых элемента (несущий винт  и рабочее колесо
и рабочее колесо  выполнены пустотелыми) максимально облегчены. Приняв массу несущего винта, равным
выполнены пустотелыми) максимально облегчены. Приняв массу несущего винта, равным  , а рабочего колеса
, а рабочего колеса  кг при радиусе r=0,682 м получим значения J1=1,7 кг⋅м2, и J2=5,11 кг⋅м2.
кг при радиусе r=0,682 м получим значения J1=1,7 кг⋅м2, и J2=5,11 кг⋅м2.
Приняв угловое ускорение ε=31,4 рад/с2 (5 оборотов за 1 секунду) момент силы равен
М=6,81⋅31,4=213,8 Нм
При этом необходимая мощность в случае вращательного движения равна
Р=М⋅ω,
Р=213,8⋅31,4=6713,3 Вт или Р=9,12 л.с.
Оценим подъемную силу, создаваемую несущим винтом и скоростью подъема ЛА для выбранной массы m1=2000 кг и m2=1500 кг. Расстояние h между несущим винтом и рабочим колесом выбирается из условия работы подъемной силы крыла в свободном пространстве.
Подъемная сила крыла в свободном пространстве может быть оценена из зависимости
где R - подъемная сила, ρ - плотность воздуха (1,29 кг/м3), А - площадь крыла, с - аэродинамический коэффициент, υ - линейная скорость.
Сумма площадей всех четырех лопастей равна A=0,415 м2.
Аэродинамический коэффициент с при угле наклона лопастей рабочего винта α=8÷10 градусов имеющих аэродинамический профиль, равен с=1,2÷1,4.
При максимальной скорости вращения несущего винта 25 Гц угловая скорость составляет 157 рад/с, а линейная скорость для среднего радиуса винта r ~ 0,54 м, равна 84,4 м/с. Для принятых значений подъемная сила R=1906,5 Н.
Из основного уравнения динамики сила, равна
R=m⋅a.
Для принятых значений m1 и m2 скорость подъема ЛА составит υ1=0,95 м/с, υ2=1,3 м/с.
Поскольку несущий винт выполняет второстепенную функцию в перемещении ЛА в пространстве, целесообразно определить ту минимальную скорость вращения несущего винта при которой за счет подъемной силы винта, для выбранной массы, происходит эффект зависания (эффект трогания), а вся канализируемая воздушная масса через ЛА может быть использована для его перемещения в пространстве.
В начальный период взлета-посадки ЛА скорость вращения несущего винта минимальна. При скорости вращения винта, равной f=10 Гц угловая скорость составит ω=62,8 рад/с, а линейная скорость для среднего радиуса винта υ=33,7 м/с.
Для принятых значений подъемная сила равна R ≈ 304,5 Н.
Из основного уравнения динамики R=mа.
Приняв массу ЛА m=1500 кг
а=R/m=0,2 м/с2.
В начале движения ЛА из состояния покоя его перемещение может быть найдено из зависимости S=at2/2 и величина перемещения ЛА составит S=0,1 м (эффект трогания).
Для массы ЛА m=2000 кг минимальная частота вращения несущего винта, при которой происходит эффект зависания, увеличивается. Так при частоте f=15 Гц ω=94,2 рад/с, линейная скорость на среднем радиусе r ~ 0,54 м составит 50,6 м/с, а подъемная сила составит R=685,3 Н.
При этом ускорение а=0,34 рад/с2. Величина линейного перемещения ЛА в секунду составит S=0,17 м, т.е. при указанной частоте вращения несущего винта и массе ЛА наблюдается эффект зависания и угловые патрубки имеют возможность постепенного пошагового перемещения для трех блоков управления 11(1), 11(2), 11(3) фиг. 2. Они начинают отклонять воздушные потоки вдоль основания ЛА, тем самым переводя его в режим движения. Изменение скорости подъема-спуска осуществляется путем изменения скорости вращения двигателя.
Оценим необходимую мощность рабочего двигателя
P=P1+P2,
где P1 - мощность, обеспечивающая прокачку необходимого воздуха через устройство, Р2 - мощность, необходимая для преодоления сопротивления при вращении винта и лопаточных венцов рабочего колеса.
Р1=343,5 л.с.
P2=Рнв+Р1лв+Р2лв,
где Рнв - мощность, необходимая для преодоления сопротивления несущего винта,
P1лв - мощность, необходимая для преодоления сопротивления внешнего венца рабочего колеса,
Р2лв - мощность, необходимая для преодоления сопротивления внутреннего венца рабочего колеса.
Мощность необходимая при движении тела против потока равна произведению силы на скорость
Р2=Fυ,
где F - сила (гидравлическое сопротивление), υ - относительная скорость движения тела в среде.
Поскольку сила равна произведению давления на площадь F=Р⋅А, имеем
где с - безразмерное число (для тела обтекаемой формы - аэродинамическое крыло с=0,05), А - площадь наибольшего сечения тела в плоскости, перпендикулярной направлению потока.
Ребро аэродинамического профиля Н=1,5 см, а его длина L=22,5 см, количество лопастей k=4. Общая площадь А=0,0135 м2, υ - скорость среднего радиуса несущего винта ~ 107 м/с.
Тогда
с учетом пересчета единиц мощности Р2 ≈ 0,72 л.с.
Оказывают гидравлическое сопротивление и входные ребра обоих лопаточных венцов рабочего колеса. При количестве лопаток в каждом венце, равном 200 штук, имеющих аэродинамический профиль с длиной входной грани ~ 35 мм и шириной каждой входной грани Н=3 мм мощность необходимая для преодоления сопротивления при движении двух лопаточных венцов против потока определиться из приведенной выше зависимости для несущего винта. Для аэродинамического профиля лопаток с=0,05, получим, что Р1лв=1,1 л.с., а Р2лв=0,72 л.с. Необходимая результирующая мощность двигателя для выбранных параметров с учетом мощности прокачки воздушной массы, равна
Р=346 л.с.
Т.е. необходим двигатель с мощностью Р ≈ 350 л.с.
В настоящее время двигатели, обладающие такой мощностью хорошо известны в автомобильной промышленности. Использование разработанных двигателей в предлагаемом устройстве делает ЛА по цене соизмеримым с обычном автомобилем.
Отсутствие в ряде районов страны шоссейных дорог делает решение о создании фактически нового транспортного средства - актуальным.
Представляет интерес уменьшение габаритов ЛА и, в частности, габаритов несущего винта и рабочего колеса с целью возможности вписания их в основные габариты транспортного средства (автомобиля).
Расчеты показывают, что без изменения схемы построения ЛА данная задача возможна. Так, например, при максимальном диаметре рабочего колеса и несущего винта, равного 1192,7 мм (~ 1200 мм), при ширине граней лопаток наружного венца 40 мм и максимальном радиусе внутреннего лопаточного венца r=500 мм при ширине его граней равной 80 мм, увеличение частоты вращения двигателя с 25 Гц до 30 Гц позволяет сохранить скорость воздушного потока на входе в трансформеры ~ 140,7 м/с, обеспечивая массу канализируемого воздушного потока m=25,7 кг. При этом каждый из трансформеров имеет боковые (радиальные) стороны 40 мм и средний радиус 62,5 мм. Толщина всех сторон трансформеров равна 0,5 мм. Решетки обоих воздухозаборников равны 0,6×0,2=0,12 м2. Суммарная площадь обоих воздухозаборников обеспечивает заполнение кольцевого зазора внутреннего лопаточного венца (0,23 м воздушной массой).
Для увеличения радиальной скорости воздушного потока формируемой от внутреннего лопаточного венца вспомогательной системой 45 она выполнена с меньшей выходной площадью по отношению к ее входу, равной площади внутреннего лопаточного венца.
Тем самым обеспечивается полная независимость воздушных потоков от несущего винта и рабочего колеса, делая работу ЛА более надежной.
Изобретение относится к области комбинированных транспортных средств, в частности к конструкциям летательных аппаратов (далее - ЛА) на базе автомобилей. Летательный аппарат с вертикальным взлетом и посадкой содержит двигатель с валом, корпус, рабочее колесо, редуктор. Рабочее колесо конструктивно соединено с диском и выполнено с двумя лопаточными венцами. Один из лопаточных венцов расположен в кольце, сформированном обечайкой несущего винта и внешним краем диска, а другой расположен под внутренним краем лопастей несущего винта. Редуктор соединен с рабочим колесом и валом двигателя и обеспечивает вращение рабочего колеса в противоположную сторону относительно несущего винта. Внешние края лопастей несущего винта соединены с обечайкой, а внутренние - со стаканом, который соединен с валом двигателя. Преобразователи расположены равномерно под сформированным кольцом, выходы каждого из них имеют квадратное сечение, равное по площади их входам, и установлены они неподвижно относительно вращающейся обечайки с несущим винтом. Вход каждого воздуховода конструктивно соединен с выходом одного из преобразователей, а их выходы объединены в четыре группы, каждая из которых образует плотную матрицу, заключенную в тубус. Обеспечивается увеличение скорости перемещения ЛА в пространстве. 12 ил.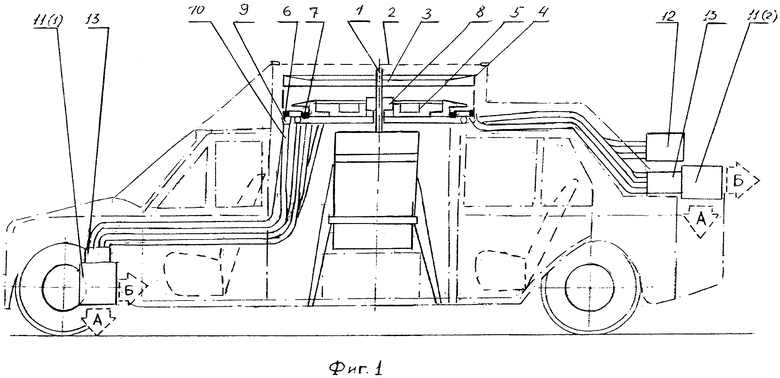
Летательный аппарат с вертикальным взлетом и посадкой, содержащий двигатель с валом, корпус, рабочее колесо, редуктор, рабочее колесо конструктивно соединено с диском и выполнено оно с двумя лопаточными венцами, один из лопаточных венцов расположен в кольце, сформированном обечайкой несущего винта и внешним краем диска, а другой расположен под внутренним краем лопастей несущего винта, редуктор соединен с рабочим колесом и валом двигателя и обеспечивает вращение рабочего колеса в противоположную сторону относительно несущего винта, установленного с возможностью вращения, внешние края лопастей несущего винта соединены с обечайкой, а внутренние - со стаканом, который соединен с валом двигателя, диск, расположенный под несущим винтом, наружный край которого выполнен в виде части тора и формирующий с обечайкой несущего винта кольцевую зону, лопасти несущего винта имеют аэродинамический профиль и установлены под углом 8-10 градусов к плоскости диска, лопасти несущего винта установлены со скважностью между собой, n-преобразователи-трансформеры, расположенные равномерно под сформированным кольцом, равномерно заполняя его, а выходы каждого из них имеют квадратное сечение, равное по площади их входам, и установлены они неподвижно относительно вращающейся обечайки с несущим винтом, n-воздуховоды, вход каждого из которых конструктивно соединен с выходом одного из n-преобразователей-трансформеров, а их выходы объединены в четыре группы, каждая из которых образует плотную матрицу укладки, заключенную в тубус, четыре блока управления, каждый из блоков управления выполнен в виде углового патрубка и механизма его перемещения, три из четырех выходов плотных матриц укладки пространственно разнесены между собой по основанию ЛА и расположены один в головной части ЛА, а два других - в задней его части, четвертый блок управления расположен над тубусами, установленными в задней части ЛА, выполнен он из двух взаимно перпендикулярных угловых патрубков и управляющего руля, один из угловых патрубков ориентирован по строке плотной матрицы укладки воздуховодов, а другой - по столбцу, с возможность возвратно-поступательного перемещения в диапазоне одного ряда или столбца плотной матрицы укладки воздуховодов, а управляющий руль выполнен в виде жалюзи, установленного вертикально с возможностью углового поворота в диапазоне ± 45 градусов, два тубуса, расположенные в задней части ЛА, выполнены составными из двух частей, разделенных эластичной вставкой, обе эластичные вставки выполнены в виде пустотелого шарового шарнира, имеющего подвижную и неподвижную части, с каждой из которых соединены соответственно по одной из двух частей тубуса, одна из частей каждого тубуса установлена неподвижно, а другая - с возможностью углового отклонения в вертикальной и горизонтальной плоскостях и механизма углового отклонения каждой подвижной части тубуса, отличающийся тем, что с целью повышения надежности работы ЛА он снабжен вспомогательной системой, соединенной с верхом рабочего колеса, двумя воздухозаборниками, расположенными на корпусе ЛА, внутренний лопаточный венец расположен внутри рабочего колеса и ориентирован таким образом, что направление воздушного потока, прошедшего через него, параллельно по отношению к направлению потока от внешнего лопаточного венца, внутренний лопаточный венец максимально приближен к внешнему лопаточному венцу, вспомогательная система обеспечивает отклонение направления воздушных потоков от внутреннего лопаточного венца по радиусу рабочего колеса в сторону внешнего лопаточного венца, площади обеих частей тубуса, соединенных с пустотелым шаровым шарниром, имеют разные сечения, площадь подвижной части тубуса А2 меньше площади неподвижной части тубуса A1.
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ (АППАРАТ - СОЛОУХИНОЙ Е.Н.) | 2017 |
|
RU2652423C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО "АВТОЛЕТ" | 2007 |
|
RU2360802C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ (АППАРАТ СОЛОУХИНОЙ Е.Н.) | 2014 |
|
RU2560172C9 |
| CN 1948084 A, 18.04.2007 | |||
| CN 204936728 U, 06.01.2016. | |||

