Изобретение относится к области летательных аппаратов и может быть использовано для перемещения людей и грузов, в том числе и в пределах городов, как безопасный летательный аппарат, у которого нет открытого несущего воздушного винта.
Рабочий винт выполнен в виде несущего винта, образованного из m-лопастей, имеющих аэродинамический профиль и установленных под углом 8÷10 градусов к плоскости диска, над которым он вращается с зазором к нему, проекции лопастей на плоскость диска образуют кольцо без зазоров. Лопасти с одной стороны соединены с обечайкой, которая в свою очередь соединена с тонкостенным конусом, а с другой - со стаканом конструктивно соединенного с валом двигателя, вращающего рабочий винт.
Наружный край диска выполнен в виде части тора, образуя с тонкостенным конусом кольцевой зазор, обеспечивающий отклонение воздушного потока вниз. Набегающая воздушная масса воздуха перехватывается окнами, образованными входным ребром лопастей аэродинамического профиля и диском по вертикали и по горизонтали обечайкой и стаканом. За счет центробежной силы и силы Кориолиса воздушный поток отбрасывается на периферию вращающегося винта, заполняя кольцевой зазор. Вдоль всего кольцевого зазора неподвижно установлены n-преобразователей (трансформеров), с выходом каждого из которых соединен один из n-воздуховодов. Все выходы воздуховодов объединены в четыре группы, каждая из которых образует плотную матрицу укладки и с каждой из которых соединены один из четырех блоков управления, обеспечивая пространственные отклонения канализируемых с помощью воздуховодов воздушных пучков.
Выходные матрицы укладки пространственно разнесены по основанию летательного аппарата (ЛА), три из которых участвуют в перемещении ЛА в пространстве. При взлете-посадке ЛА, образуя при этом три точки опоры, обеспечивая пространственную устойчивость ЛА и отклоняя воздушные потоки с помощью соответствующих блоков управления в нужном направлении, а четвертая обеспечивает пространственную стабилизацию аппарата при вращении рабочего винта.
Такое выполнение ЛА позволяет уменьшить его габариты и упростить конструкцию и, как следствие, позволяет скомплексировать его с легковым автомобилем.
Известны летательные аппараты с вертикальным взлетом-посадкой (вертолеты) (см. Б.Н. Юрьев "Аэродинамический расчет вертолетов", Оборон-гиз. М., 1956 г.). Несмотря на широкое использование этих устройств, они обладают тем недостатком, что они используют значительные размеры лопастей (несущие винты). Требование получить большую тягу заставляет конструкторов применять диаметры, доходящие до 37 м (обычно 12÷25 м) (см. книгу Б.Н. Юрьева, стр. 51). Использование таких вертолетов в условиях города небезопасно, к тому же их изготовление требует значительных материальных затрат.
Известен ряд летательных аппаратов, типа летающая тарелка, габариты которых значительно меньше вертолетов (патент RU 2071441, В64C 27/20, 1997 г., патент Японии №57-61640, В64С 27/20, 1982 г., заявка ФРГ № OS 34491 В34/С, 1986 г.).
Известен аэродинамический движитель (RU 2153442, В64С 27/20 С2, 1998 г.). Это устройство наиболее близко по своей технической сущности к предлагаемому устройству (прототип).
В этом аппарате, содержащем корпус, выполненный из двух частей: верхней конической с двумя отверстиями в торцах, сверху меньшего диаметра, а снизу большего, и нижней дисковой, образующей с верхней частью зазор, верхняя и нижняя части корпуса жестко соединены между собой, в нижней части корпуса установлена с возможностью вращения втулка рабочего колеса, лопатки рабочего колеса размещены внутри конической части корпуса и выполнены с минимальным зазором относительно ее внутренней поверхности, а рабочие поверхности лопаток установлены перпендикулярно плоскости вращения рабочего колеса.
Недостатком данного устройства является то, что оно может быть использовано только как устройство для взлета-посадки ЛА и не позволяет его пространственное перемещение и, следовательно, не позволяет его скомплексировать с легковым автомобилем.
Эта задача решается в предлагаемом аппарате благодаря тому, что рабочий винт выполнен в виде несущего винта, аэродинамические лопасти которого в совокупности образуют кольцо и все лопасти которого с одной стороны соединены с обечайкой, а с другой - со стаканом.
Рабочий винт расположен внутри, по сути, неподвижного корпуса, имеющего габариты (⌀ 1,4 м и высота ~0,3 м), что обеспечивает его возможное объединение с легковым автомобилем и его дальнейшую безопасную эксплуатацию в условиях города, так как нет опасности зацепиться вращающимся винтом за посторонние предметы, не требуется оборудование специальных взлетно-посадочных зон.
Набегающий воздушный поток на рабочий винт после его прохождения через винт отклоняют на его периферию. Рабочим винтом и диском, расположенным под винтом, формируют кольцевой зазор. Заполняют этим воздушным потоком весь кольцевой зазор. Весь воздушный поток, прошедший кольцевой зазор, перехватывают с помощью n-трансформеров, расположенных за кольцевым зазором, и n гибких воздуховодов. Вход каждого из воздуховодов соединен с выходом одного из n-трансформеров. Объединяют все воздуховоды в четыре группы плотных матриц на их выходе.
Пространственно разносят три группы плотных матриц вдоль основания ЛА, располагая одну из групп впереди ЛА, а две другие в его задней части на равных расстояниях от оси вращения винта, формируя три точки опоры ЛА, что делает его устойчивым при взлете-посадке (фиг. 1, фиг. 2). При взлете-посадке ЛА работает как его несущий рабочий винт, так и кинетическая энергия воздушной массы, перехваченная рабочим винтом и канализированная с помощью воздуховодов.
Скорость подъема ЛА и пространственного его перемещения обеспечивается частотой вращения рабочего несущего винта.
Перемещение ЛА по курсу обеспечивается за счет кинетической энергии канализируемого воздушного потока с помощью трех блоков управления отклоняющих воздушные потоки вдоль строительной оси ЛА после из прохождения через соответствующие три плотные матрицы воздуховодов. Четвертый блок управления обеспечивает пространственную стабилизацию ЛА, т.е. в предложенном устройстве отсутствует хвостовая часть, присущая традиционным вертолетам, что делает его компактным.
Объединение предложенного ЛА с легковым автомобилем позволяет получить новый продукт, который может найти широкое применение на рынке товаров и услуг.
Использование существующих двигателей делает предлагаемый ЛА по стоимости равным стоимости обычного автомобиля.
На фиг. 1 дан продольный разрез предлагаемого устройства и его возможная компоновка в легковом автомобиле.
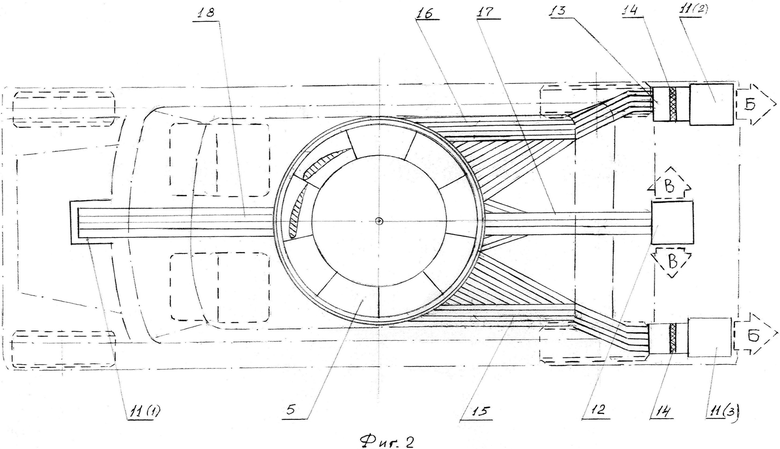
На фиг. 2 - вид сверху.
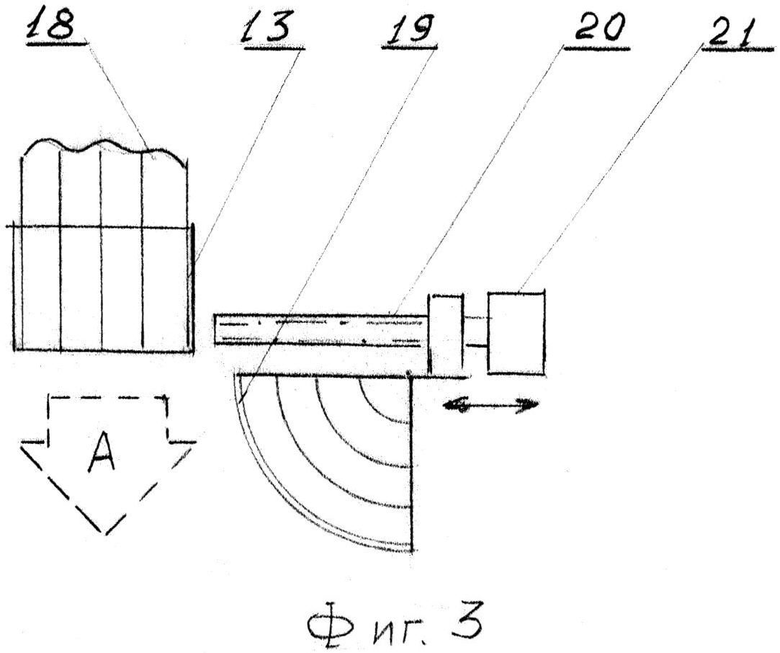
На фиг. 3 - вид сбоку блока управления, расположенного в головной части летательного аппарата (ЛА).
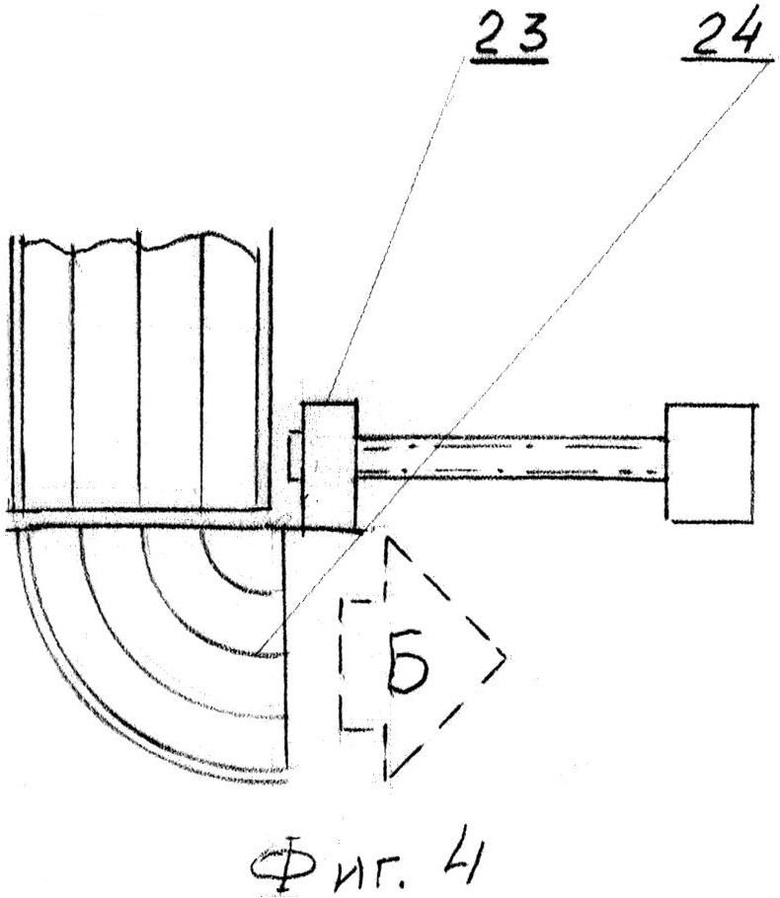
На фиг. 4 - положение углового патрубка по отношению к матрице воздуховодов при перемещении ЛА по курсу.
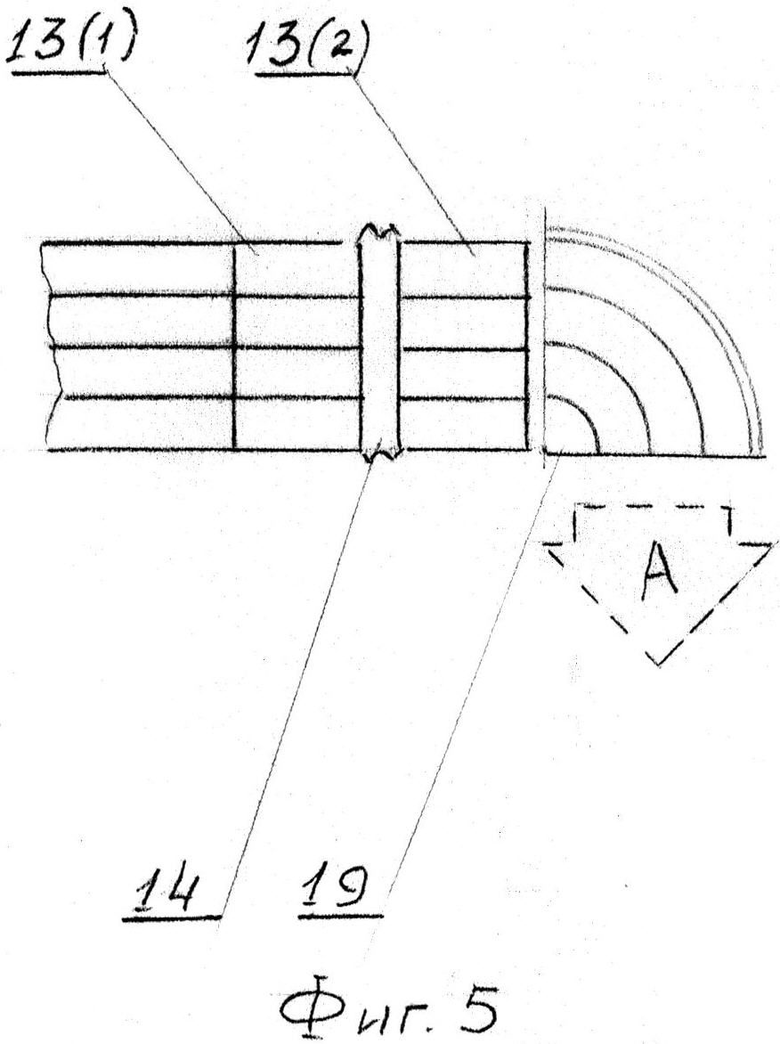
На фиг. 5 - вид сбоку одного из двух блоков управления, расположенных в задней части ЛА, где показано положение углового патрубка по отношению к тубусу, соединенного с концом воздуховодов, уложенных в плотную матрицу. Режим работы ЛА - взлет-посадка.
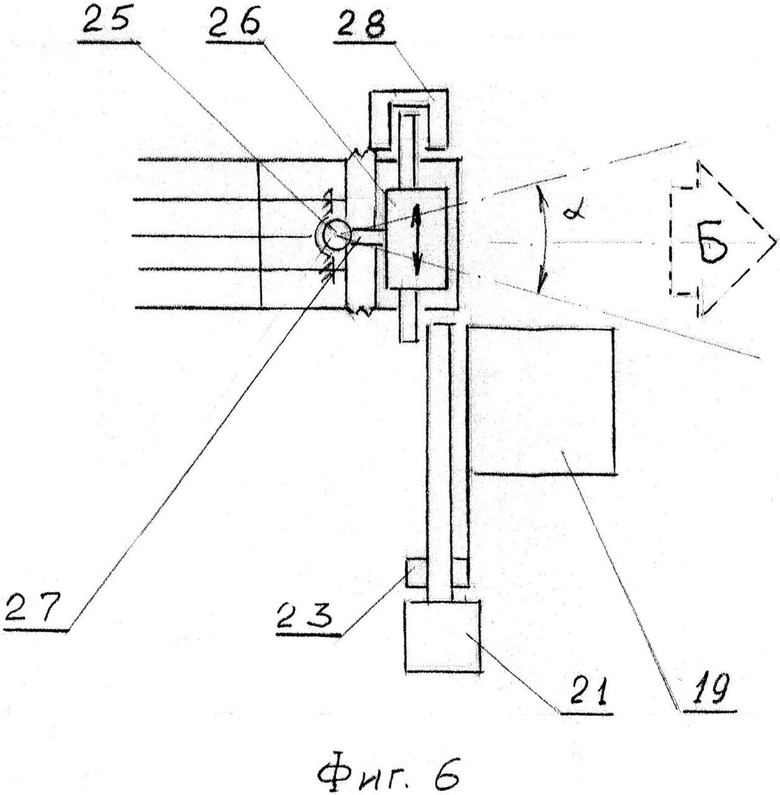
На фиг. 6 - положение углового патрубка в задней части ЛА при перемещении его по курсу. Вид в горизонтальной плоскости.
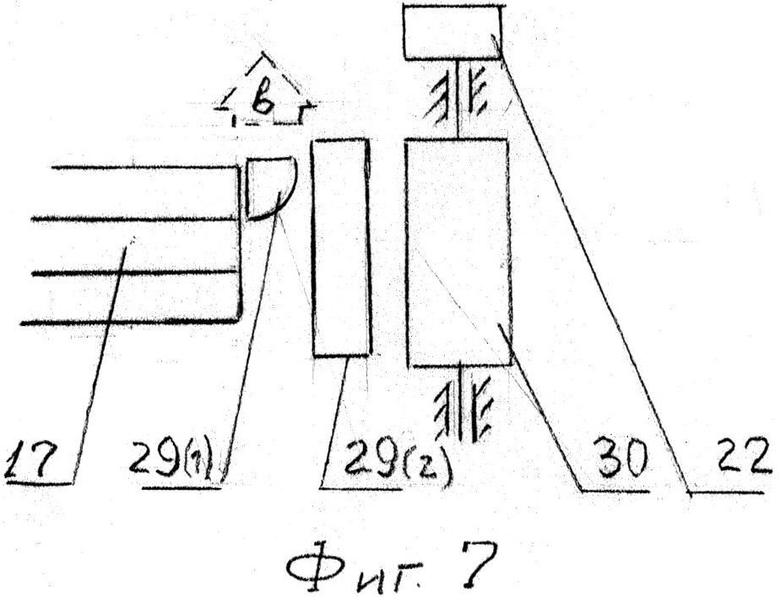
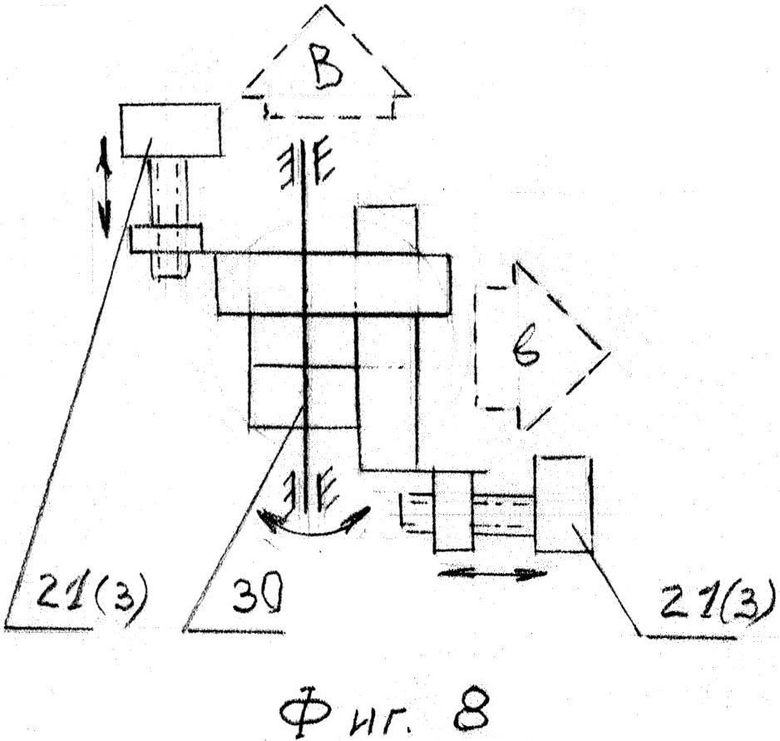
На фиг. 7, 8 показаны положение двух угловых патрубков для стабилизации пространственного положения ЛА и управляющий руль, обеспечивающий угловое перемещение ЛА по курсу, в двух взаимно перпендикулярных плоскостях.
Устройство состоит из двигателя 1 с валом 2. На входе устройства расположена защитная сетка 3 для предотвращения попадания на рабочий винт посторонних предметов.
Рабочий винт выполнен в виде несущего винта 5, образованного из m-лопастей, имеющих аэродинамический профиль и установленных под углом 8÷10 градусов к плоскости диска 7 с зазором к нему. Он соединен с одной стороны с обечайкой 4, которая в свою очередь скреплена с тонкостенным конусом 9, а с другой - со стаканом. Стакан 6 соединен с валом двигателя 2. Проекции лопастей несущего винта 5 на плоскость диска образуют кольцо без зазоров. Наружный край диска 7 выполнен в виде части тора. Этот край диска совместно с тонкостенным конусом 9 образуют кольцевой зазор, обеспечивая отклонение направления воздушного потока вниз. Вдоль всего кольцевого зазора неподвижно установлены n-преобразователи 8 (трансформеры), каждый из них позволяет преобразовать 1/n часть площади кольца в квадрат, площадь которого равна площади 1/n площади кольца. Каждый из выходов преобразователей 8 соединен с одним из воздуховодов 10. Все выходы воздуховодов объединены в четыре группы 15, 16, 17, 18 (фиг. 2).
Каждый из выходов воздуховодов образует плотную матрицу укладки и с каждой из них соединен тубус 13. С каждой плотной матрицей укладки соединен один из четырех блоков управления 11 (1), 11 (2), 11 (3), 12, которые пространственно разнесены по основанию ЛА (фиг. 2) и обеспечивают отклонение воздушных пучков, канализируемых с помощью воздуховодов 10.
На фиг. 3, 4, 5, 6 с помощью стрелок А и Б показаны направления воздушных пучков при двух возможных положениях угловых патрубков 19 при взлете-посадке ЛА и при курсовом перемещении ЛА соответственно.
На фиг. 3 и 4 схематично показан один из возможных механизмов перемещения углового патрубка. Он состоит из привода перемещения 21, винтового механизма 20 и гайки 23, соединенной с угловым патрубком 19.
На фиг. 5 тубус 13 (1), 13 2) состоит из двух частей - одна из которых неподвижна, а другая имеет возможность углового поворота и разделенных между собой эластичной (гибкой) вставкой 14.
Шаровые опоры 25 установлены на неподвижной части тубуса с противоположных его сторон.
Шаровые опоры 25 через рычаг 27 соединены с кареткой 26, перемещаемой по рамке. Двойная рамка 28 с двумя приводами, обеспечивающими отклонение геометрической оси выходной части тубуса в двух взаимно перпендикулярных плоскостях в углах ±15 градусов (на фиг. 6 угол α).
На фиг. 7 один из двух угловых патрубков 29 (2) установлен вдоль строки плотной матрицы укладки воздуховодов 17 с возможностью поступательного перемещения вверх-вниз, отклоняя воздушный поток вверх, а другой 29 (1) - вдоль столбца плотной матрицы воздуховодов с возможностью перемещения влево-вправо, отклоняя перехваченные пучки в стороны по горизонтали. Угловые патрубки 29 (1) и 29 (2) перемещаются соответствующим механизмом перемещения с помощью приводов 21 (3). Линейные перемещения угловых патрубков проводят в диапазоне от 0÷50 мм, перекрывая один ряд воздуховодов (строка или столбец).
На выходе воздуховодов 17 установлен управляющий руль 30, выполненный в виде одиночной жалюзи, ребро которой расположено вдоль границы одного из столбцов плотной матрицы укладки воздуховодов. Поворот управляющего руля осуществляется с помощью привода 22, который поворачивает руль в диапазоне ±45 градусов, обеспечивая отклонение части воздушного потока, не перехваченной угловыми патрубками.
Угловой патрубок 29 (2), отклоняя часть воздушного потока вверх, компенсирует подъемную силу, создаваемую несущим рабочим винтом, а угловой патрубок 29(1), отклоняющий часть воздушного потока по горизонтали, компенсирует инерционное вращение ЛА вокруг оси двигателя (собственной оси), вызванное работающим несущим винтом, тем самым стабилизирует пространственное положение ЛА. На фиг. 7 с помощью стрелок B и в показаны направления воздушных потоков при их перехватывании с помощью угловых патрубков 29 (1) и 29 (2).
Угловые патрубки 19 установлены с возможностью шагового (дискретного) их перемещения, равного ширине одного столбца матрицы плотной укладки воздуховодов, тем самым используя воздушные потоки, прошедшие соответствующие блоки управления 11(1), 11 (2), 11 (3) одновременно как для подъема ЛА, так и для его перемещения по курсу.
Устройство работает следующим образом. При включении двигателя начинает одновременно вращаться рабочий винт и связанные с ним обечайка и стакан, соединенный с валом. Обечайка конструктивно соединена с тонкостенным конусом. Лопасти рабочего (несущего) винта установлены под углом 8÷10 градусов к плоскости диска с зазором по отношению к нему. Каждая из лопастей фактически образует входное отверстие, боковые стороны каждого из которых ограничены с одной стороны обечайкой, а с другой - стаканом. Верх ограничен ребром лопасти аэродинамического профиля, а низ - диском, расположенным в нижнем отверстии тонкостенного конуса. Набегающий воздушный поток, пройдя защитную сетку, установленную перед несущим винтом, перехватывается вращающимися лопастями несущего винта.
Под действием центробежной силы (Fц) перехваченный лопастями воздушный поток отбрасывается на периферию рабочего винта в зону кругового зазора
Fц=mω2r,
где m - масса воздуха, ω - угловая скорость рабочего винта, r - радиус окружности зазора.
При этом при движении воздушного потока по радиусу от центра вращения он приобретает тангенциальное ускорение, которое вызывается силой Кориолиса (Fк)
Fк=2mυω,
где m - воздушная масса, υ - постоянная по величине скорость тела, направленная по радиусу, ω - угловая скорость вращения рабочего винта.
Перемещение тела (воздуха) в радиальном направлении равно
r=υt.
За то же время (точка) воздушная масса, удаленная от центра вращения на расстояние r, пройдет по дуге окружности путь
S=rωt.
В результате одновременного действия центробежной силы и силы Кориолиса перехватываемый лопастями винта воздушный поток отбрасывается на периферию рабочего винта, заполняя кольцевой зазор.
Конструкция тонкостенного конуса и диска отклоняют воздушный поток, прошедший кольцевой зазор, вниз. Корпус, с которым соединен рабочий винт, выполнен в виде конуса, а наружный край диска выполнен в виде части тора.
Площадь кольцевого зазора равна суммарной площади входных окон, образуемых лопастями.
Необходимость комплексирования летательного аппарата (ЛА) с легковым автомобилем накладывает ограничение при выборе максимального диаметра несущего винта, поскольку он должен вписываться в габариты легкового автомобиля. В этом случае несущий винт будет расположен внутри корпуса автомобиля, что делает его безопасным при эксплуатации. В настоящее время известен ряд легковых автомобилей, габариты верхней части кузова которых составляют ~1500 мм (например, ЗИЛ-117, ЗИЛ-4104). Вписаться в указанные габариты корпуса может рабочий винт, имеющий максимальный диаметр ~1,4 м. Приняв количество лопастей m равным 9, внутренний диаметр рабочего винта определяется скоростью перемещения воздушной массы в радиальном направлении.
Радиальное ускорение (ар) определяется следующей зависимостью
ap=ω2r.
Приняв максимальную частоту вращения рабочего винта равной f=40 Гц, ω=251 рад/с, скорость перемещения воздушной массы по радиусу υ=at, при этом перемещение воздушной массы в радиальном направлении равно
r=υt.
При принятой максимальной частоте вращения рабочего винта и количестве лопастей время прохождения одной лопасти составит t~2,8·10-3 с.
Приняв внутренний диаметр винта равным 0,95 м, видим, что перемещение воздушной массы в радиальном направлении за время прохождения одной лопасти составит r=0,23 м. Т.е. для ширины лопасти l=0,225 м перехватываемая воздушная масса полностью перемещается в зону кольцевого зазора.
Суммарная площадь входных окон составит S9 щел=0,14175 м2, что эквивалентно наружному диаметру кольца, равному ~1,465 м. Т.е. ширина кольцевого зазора составляет l=32,3 мм.
Перехваченный лопастями рабочего винта воздушный поток канализируется через кольцевой зазор, не испытывая дополнительного сопротивления.
Вдоль кольцевого зазора расположены n-преобразователей (трансформеров), позволяющих преобразовать часть участка кольцевого зазора на его входе в квадрат на его выходе. Площадь входа каждого трансформера имеет форму части кольца и равна по площади 1/n части кольцевого зазора. Так, например, для принятого максимального диаметра несущего винта, равного 1,4 м, и при ширине зазора l=32,3 мм при n=57 площадь входа каждого трансформера составит S=24,9 см2, а его выход будет иметь сторону квадрата, равную ~50 мм.
С выходом каждого трансформера соединен один из n гибких воздуховодов.
Данные трансформеры позволяют в дальнейшем преобразовать, с помощью воздуховодов, кольцевую зону воздушного потока на выходе рабочего винта в четыре самостоятельные группы воздушных потоков на выходе летательного аппарата. Выходы воздуховодов объединены в четыре группы, каждая из которых образует плотную построчную (ряды) матрицу (столбцы) укладки. Три группы (фиг. 2) 15, 16, 18 имеют плотную укладку из 16 воздуховодов (4×4), а одна (фиг. 2) 17 из 9 (3×3), что обеспечивает компактную зону управления воздушным потоком.
На выходе каждой из четырех матриц воздуховодов расположены блоки управления, выполненные в виде углового патрубка 19 с механизмом его перемещения 20, 21, обеспечивая изменение пространственной ориентации выходных воздушных потоков.
Три из четырех блоков управления 11 (1), 11 (2), 11 (3) работают для перемещения ЛА в пространстве. Перемещение ЛА, его подъем происходит за счет действия как подъемной силы рабочего несущего винта, так и за счет кинетической энергии канализируемого воздушного потока.
При положении углового патрубка таким образом, что отклоняемый ими воздушный поток направлен вниз летательного аппарата (фиг. 1 вид, по стрелке А), происходит взлет-посадка ЛА.
С помощью гибких воздуховодов, образующих три матрицы, есть возможность пространственно разнести их вдоль основания летательного аппарата, тем самым при взлете-посадке ЛА у него имеются три точки опоры, обеспечивая его наибольшую устойчивость.
При вращении рабочего винта с необходимой угловой скоростью он обеспечивает зависание ЛА, при этом появляется возможность частичного или полного перехвата воздушных пучков с помощью углового патрубка 19, отклоняя воздушные потоки от каждого блока управления либо вдоль строительной оси ЛА, осуществляя тем самым поступательное перемещение ЛА, либо используя шаговое перемещение патрубка, осуществлять одновременно с поступательным перемещением ЛА его подъем.
Изменение скорости подъема-спуска осуществляется путем изменения скорости вращения рабочего винта.
Оценим скорость подъема ЛА за счет кинетической энергии канализируемого воздушного потока, перехватываемого щелями рабочего несущего винта. Приняв частоту вращения рабочего винта f=5 Гц, объем воздуха, канализируемого в секунду, составит V=2,657 м3, а его масса m=3,43 кг, при этом скорость на краю винта (вход в кольцевой зазор) составит υ~22 м/с.
Кинетическая энергия W канализируемой воздушной массы равна
Для указанных значений W=829 Дж.
Запасенная кинетическая энергия позволяет сообщать телу (ЛА) ускорение и заставит его двигаться с определенной скоростью. Для ЛА с массой m=2000 кг скорость 
Т.е. фактически уже при незначительной угловой скорости вращения рабочего винта (f=5 Гц) наблюдается эффект трогания ЛА.
Оценим подъемную силу и частоту вращения винта, при которой происходит подъем ЛА для выбранной массы - эффект зависания.
Подъемная сила крыла в свободном пространстве может быть оценена из зависимости
где R - подъемная сила, ρ - плотность воздуха (1,29 кг/м3), А - площадь крыла, c - аэродинамический коэффициент, υ - линейная скорость.
Сумма проекции площадей всех лопастей на плоскость диска образуют кольцо без разрывов. Для принятых размеров несущего винта общая площадь крыла равна А=0,83 м2.
Аэродинамический коэффициент с при угле наклона лопастей рабочего винта α=8÷10 градусов, имеющих аэродинамический профиль, равен с=1,2÷1,4.
В начальный период взлета-посадки ЛА скорость вращения рабочего винта минимальна. При скорости вращения винта, равной f=10 Гц, угловая скорость составит ω=62,8 рад/с, а линейная скорость для среднего радиуса винта υ=36,7 м/с.
Для принятых значений подъемная сила равна R≈865,3 Н.
Из основного уравнения динамики
R=ma.
Приняв массу ЛА m=2000 кг,
a=R/m=0,43 м/с2.
В начале движения ЛА из состояния покоя его перемещение может быть найдено из зависимости S=at2/2.
За время, равное t=1 сек, это перемещение ЛА составит S~0,22 м. Т.е. уже при частоте вращения винта с f=10 Гц наблюдается эффект зависания. Работа винта над экраном (диском) увеличивает подъемную силу ЛА. По мере нарастания скорости вращения рабочего винта постепенно при шаговом перемещении угловых патрубков трех блоков управления 11(1), 11 (2), 11(3), (фиг. 2) они начинают отклонять воздушные потоки вдоль основания ЛА, тем самым переводя его в режим движения.
На фиг. 3, 4, 5, 6 показаны положения угловых патрубков при подъеме и движении ЛА для двух блоков управления, расположенных в головной и задней частях ЛА.
На выходе двух матриц воздуховодов в задней части ЛА установлены квадратные тубусы, состоящие из двух половинок. Один из концов каждого тубуса конструктивно жестко соединен с одним из двух выходов воздуховодов без зазоров, между половинками тубусов установлены эластичные (гибкие) вставки, позволяющие через соответствующий механизм осуществлять угловой поворот другой половинки тубуса совместно с соответствующим блоком управления в двух взаимно перпендикулярных координатах относительно входной части тубуса.
При угловом повороте выходной части тубуса с блоком управления происходит также угловое отклонение канализируемых пучков в диапазоне ±15 градусов, в результате чего осуществляется угловой разворот ЛА.
Механизм поворота части тубуса конструктивно может быть выполнен из двух шаровых опор, расположенных на противоположных сторонах неподвижной части тубуса, каждая из которых соединена с одним из двух рычагов, другим концом рычаги соединены с подвижными рамками, внутри которых закреплен соответствующий выходной край тубуса. При перемещении рамки относительно корпуса ЛА вместе с ней перемещается выходной край тубуса, соответственно отклоняя выходной пучок.
Выходной блок управления, расположенный в носовой части ЛА, участвует в процессе взлет-посадка и в поступательном перемещении ЛА.
Четвертый блок управления 12, плотная матрица (3×3), отклоняет часть воздушного потока с помощью двух угловых патрубков, расположенных взаимно перпендикулярно вертикально вверх и в одну из сторон по горизонтали, тем самым стабилизируя пространственное положение ЛА.
Часть воздушного потока, отклоняемая верх, компенсирует действие подъемной силы, вызванной работающим несущим винтом, а часть воздушного потока, отклоняемая по горизонтали, компенсирует инерционное вращение ЛА вокруг своей оси, вызванное тем же работающим винтом.
Такая схема построения ЛА позволяет отказаться от хвостового оперения, необходимого для традиционных вертолетов и предназначенного обеспечить его пространственную стабилизацию, что делает предлагаемый ЛА компактным, и его габариты вписываются в габариты легкового автомобиля (фиг. 1 и 2).
Частично четвертый блок управления 12 может участвовать в развороте ЛА совместно с двумя блоками управления, расположенными в задней части ЛА 11(2) и 11(3), отклоняя ЛА с помощью управляющего руля 30 (фиг. 7, 8), отклоняемого соответствующим приводом 22.
По мере нарастания скорости вращения несущего винта увеличивается и объем канализируемого воздуха в секунду, что приводит к нарастанию кинетической энергии осуществляющей перемещение ЛА в пространстве. При максимальной частоте вращения несущего винта f=40 Гц (n=2400 об/мин) угловая скорость составит 251 рад/с. При этом линейная скорость на краю винта равна 175, 7 м/с. При этом воздушная масса испытывает центробежную силу. Перемещение воздушной массы в радиальном направлении равно r=υt, при радиусе (ширине) лопасти винта r=0,225 м и времени поворота одной лопасти (шаг) t=0,00277 с скорость составит υ=81 м/с.
Поскольку скорость является векторной величиной, а перемещение воздушной массы происходит по радиусу (υцб) и окружности (υокр), результирующая скорость воздушного потока (υp) на выходе рабочего винта равна
Для полученных значений скорость потока на входе в кольцевой зазор составит υp=193,47 м/с.
Объем воздушной массы, канализируемый рабочим винтом, в секунду составит V=21,3 м3, а его масса m=27,4 кг.
Кинетическая энергия, создаваемая этим воздушным потоком, позволяет перемещать ЛА массой m=2000 кг со скоростью υ=22,7 м/с, т.е. ~82 км/час.
Оценим необходимую мощность рабочего двигателя
Р=Р1+Р2,
где P1 - мощность, обеспечивающая прокачку необходимого воздуха через устройство, Р2 - мощность, необходимая для преодоления сопротивления при вращении винта.
Для прокачки объема воздуха V=21,3 м3 в секунду с массой m=27,4 кг мощность может быть оценена из зависимости
Р=W/t,
где W - работа, t - время.
Поскольку работа, затраченная на ускорение тела, равна
где υ - линейная скорость среднего радиуса несущего винта, равна ~147 м/с, то для канализации указанного объема воздуха требуется энергия Wк=296043 Дж, или отнесенная к 1 секунде, получим необходимую мощность P1=296063 Вт.
С учетом того что 1 л.с. ~736 Вт, получим, что для канализации такого объема воздуха в секунду необходима мощность двигателя P1~402 л.с.
Мощность, необходимая при движении тела против потока, равна произведению силы на скорость
Р2=Fυ,
где F - сила (гидравлическое сопротивление), υ - относительная скорость движения тела в среде.
Поскольку сила равна произведению давления на площадь F=Р·А, имеем
где с - безразмерное число (для тела обтекаемой формы - аэродинамическое крыло с=0,05), А - площадь наибольшего сечения тела в плоскости, перпендикулярной направлению потока.
Ребро аэродинамического профиля Н=1,5 см, а его длина L=22,5 см, количество лопастей m=9. Общая площадь А=0,03 м2, υ - скорость среднего радиуса несущего винта ~147 м/с. Тогда
с учетом пересчета единиц мощности Р2=3,2 л.с.
Общая необходимая мощность рабочего двигателя Р должна быть ~410÷450 л.с.
В настоящее время двигатели, обладающие такой мощностью, хорошо известны в автомобильной промышленности. Использование разработанных двигателей в предлагаемом устройстве делает ЛА по цене соизмеримым с обычным автомобилем.
За счет разной длины внутренней и наружной граней, каждой из m-лопастей при установке их под одним углом, например 8 градусов высота входного окна около стакана, равна 46,4 мм, а у обечайки 68,4 мм, т.е. наклон входной грани каждой из m-лопастей к плоскости диска, для выбранных параметров, составляет ~ 6 градусов. В конце каждой из m-лопастей эта разница равна нулю. Увеличение угла наклона входных граней m-лопастей может быть достигнуто путем установки внешней грани лопастей, соединенных с обечайкой под большим углом, например под углом 10 градусов.
По сути, обратная сторона каждой из m-лопастей рабочего винта 5 представляет собой лопатку, отражающую набегающий воздушный поток от нее в сторону кольцевого зазора при многостороннем всасывании входными отверстиями. Вследствие центробежной силы воздух приводится в движение (сжимается) и затем выбрасывается (образуется вакуум содействующий всасыванию воздуха через входные отверстия). Чтобы вектора направленности окружной скорости на входе в кольцевой зазор и отраженного воздушного потока от обратной стороны m-лопастей (лопаток) не имели разнонаправленности - диск снабжен дополнительным стаканом и радиальными или изогнутыми полосами, ориентированными своими плоскостями перпендикулярно плоскости диска 7, соединены с ним и формируют межлопаточные каналы от дополнительного стакана до начала тора диска 7.
Воздушный поток после его отражения от обратной стороны m-лопастей переотражают радиальными или изогнутыми полосами тем самым исключают разнонаправленное значение радиального вектора скорости по отношению с вектором окружной скорости, что способствует повышению результирующей скорости воздушного потока на входе в кольцевой зазор.
Высота и количество полос, соединенных с диском, определяется для каждой конкретной схемы построения летательного аппарата. Например, для принятых конструктивных параметров высота полос может быть принята равной 7 мм, а количество радиальных полос под каждой лопастью несущего винта, равна 10.
При выполнении диска 7 с радиальными или изогнутыми полосами, несущий винт 5 в этом случае должен быть установлен с зазором уже не к плоскости диска 7, а к верхним граням полос соединенных с диском и образующих межлопаточные каналы.
Для сохранения максимальной окружной скорости на входе в кольцевой зазор, образовавшийся при поднятии несущего винта 5 над межлопаточными каналами, образовавшееся окно должно быть перекрыто за счет соответствующего удлинения каждой из m-лопастей над кольцевым зазором, либо иным известным устройством.
Для снижения воздушного (гидравлического) сопротивления геометрическая ось каждого из n-преобразователей (трансформеров) ориентирована навстречу вектору окружной скорости воздушного потока.
Объединение ЛА с автомобилем по существу позволяет получить новый продукт, который может найти широкое применение на рынке товаров и услуг.
Увеличение транспортной нагрузки на дороги города требует поиска новых путей решения данной проблемы, а отсутствие в ряде районов страны шоссейных дорог делает решение о создании фактически нового транспортного средства актуальным.
Изобретение относится к области комбинированных транспортных средств, в частности к конструкциям летательных аппаратов (ЛА) на базе автомобилей. Особенностью построения ЛА является отсутствие открытого несущего винта и его небольшие габариты, что позволяет вписать его в габариты автомобиля. Несущим винтом и диском, расположенным под винтом формируют кольцевой зазор, перехватывают воздушный поток, прошедший через зазор с помощью n-трансформеров, расположенных за кольцевым зазором, и n-гибкими воздуховодами объединяют все воздуховоды в четыре группы плотных матриц. Пространственно разносят три из них вдоль основания (ЛА), создавая три точки опоры (ЛА) при взлете-посадке, обеспечивая его пространственную устойчивость. Лопасти несущего винта установлены под углом 8-10° к плоскости диска с зазорами и соединены с одной стороны с обечайкой, а с другой - со стаканом. Проекции лопастей на плоскость диска образуют кольцо без разрывов. Наружный край диска выполнен в виде части тора. Вход каждого из n-преобразователей равен 1/n части кругового кольцевого зазора. Достигается возможность пространственного перемещения транспортного средства в воздушной среде. 8 ил.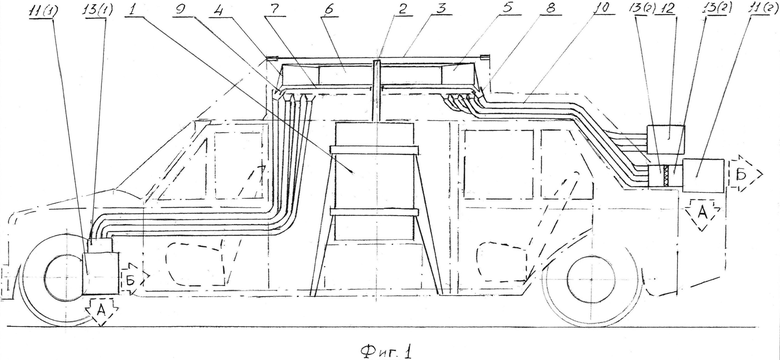
Летательный аппарат с вертикальным взлетом и посадкой, содержащий корпус, выполненный из наружного тонкостенного конуса с двумя отверстиями в торцах, и диск, симметрично расположенный в нижнем отверстии конуса, образующий с ним круговой зазор, рабочий винт, установленный внутри тонкостенного конуса, и втулку, соединенную с рабочим винтом, установленную с возможностью вращения, отличающийся тем, что с целью возможности комплексирования его с легковым автомобилем устройство снабжено обечайкой, соединенной с тонкостенным конусом, n-преобразователями-трансформерами, n-воздуховодами, четырьмя блоками управления и двумя составными тубусами, каждый из которых имеет эластичную вставку между двумя своими частями, рабочий винт выполнен в виде несущего винта, лопасти которого имеют аэродинамический профиль и установлены под углом 8÷10° к плоскости диска с зазорами, края всех m-лопастей с одной стороны соединены с обечайкой, а с другой - с втулкой, выполненной в виде стакана, проекции лопастей на плоскость диска образуют кольцо без разрывов, наружный край диска выполнен в виде части тора, образуя с тонкостенным конусом кольцевой зазор, а обечайка и связанный с ней рабочий винт имеют возможность одновременного вращения, вход каждого из n-преобразователей-трансформеров равен 1/n части кругового кольцевого зазора и все их входы расположены вдоль этого зазора плотно между собой, а выходы каждого из них имеют квадратное сечение, равное по площади их входам, и установлены они неподвижно относительно вращающейся обечайки с рабочим винтом с зазором по отношению к ней, входы каждого их n-воздуховодов конструктивно соединены с выходом одного из преобразователей, а их выходы объединены в четыре группы, каждая из которых образует плотную матрицу укладки, каждый из блоков управления выполнен в виде углового патрубка и механизма его перемещения, три из четырех выходов плотных матриц укладки пространственно разнесены между собой по основанию ЛА и расположены один в головной части ЛА, а два других в задней его части, входы каждого из двух тубусов конструктивно соединены с выходом одной из двух матриц плотной укладки воздуховодов, расположенных в задней его части, выходы каждого из двух тубусов установлены с возможностью углового отклонения их геометрических осей в двух взаимно перпендикулярных плоскостях в диапазоне ±15°, четвертый блок управления расположен над тубусами, выполнен он из двух взаимно перпендикулярных угловых патрубков и управляющего руля, угловые патрубки ориентированы один по строке плотной матрицы укладки воздуховодов, а другой - по столбцу, и установлены угловые патрубки с возможностью их возвратно-поступательного перемещения в диапазоне одного ряда или столбца плотной матрицы укладки воздуховодов, а управляющий руль выполнен в виде жалюзи, установленной вертикально с возможностью углового поворота в диапазоне ±45°.
| ТРАНСПОРТНОЕ СРЕДСТВО "АВТОЛЕТ" | 2007 |
|
RU2360802C2 |
| CN 102616095 A, 01.08.2012 | |||
| БОГДАНОВА УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ПЕРЕМЕЩЕНИЯ АВТОМОБИЛЯ ИЛИ ДРУГОГО ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2485016C1 |
| АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2003 |
|
RU2240958C1 |
| ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2108939C1 |

