Изобретение относится к области авиационной техники и может быть использовано в конструкции аэромобилей вертикального взлета с двумя фюзеляжами, тремя тандемными крыльями, двухвинтовыми несущей и движительно-рулевой системами, имеющими с противоположным вращением соосные винты, обеспечивающие вертикальный и короткий взлет/посадку (ВВП и КВП), и винты в задних кольцевых каналах для горизонтального полета при зафиксированных лопастях-крыльях соосных однолопастных винтов, размещенных на пилоне в изломе поперечного V межфюзеляжного среднего крыла, но и после посадки и соответствующего поворота лопастей-крыльев и их опускания в межфюзеляжное пространство - передвижения по земле.
Известен (см. https://www.advancedtacticsinc.com/) вертикально взлетающий внедорожник AT Black Knight Transformer компании Advanced TacticsInc (США) с расположением на концах четырех тандемных крыльев мотогондол, имеющих двигатели с несущими винтами, выполненными поворотными, при отклонении вперед задних из них обеспечивается горизонтальный полет, содержит фюзеляж, Т-образное хвостовое оперение и четырехопорное неубирающееся колесное шасси, имеющее передние поворотные и задние приводные колеса для передвижения по земле.
Признаки совпадающие - наличие тандемного расположения четырех высокорасположенных крыльев, имеющих в мотогондолах на их законцовках двигатели мощностью по Nдв=200 л.с. с двухлопастными винтами. Автоматическая система управляет левой и правой группой поворотных мотогондол с несущими винтами диаметром 2,1 м, обеспечивающими при весе топлива 760 кг взлетный его вес 3595 кг. Трансформер Advanced Tactics имеет высоту 2,5 м; длину 9,5/7,6 м и ширину 5,8/2,6 м соответственно в полетной/походной конфигурации, может использоваться для транспортировки 8 человек или груза до 840 кг. Скорость его передвижения по земле в качестве грузовика до 112 км/ч, а по воздуху - до 370 км/ч при его горизонтальном полете. Винтокрылая конфигурация позволяет при крейсерском полете подниматься на высоту до 3050 м и достичь при этом дальности до 500 миль за 2,5 часа полета.
Причины, препятствующие поставленной задаче: первая - это то, что восьмивинтовая конфигурация трансформера Advanced Tactics предопределяет ряд недостатков, как-то: первый - это то, что на концах консолей тандемных крыльев с размахом 3,08 м имеются поворотные мотогондолы с винтами диаметром 2,1 м, которые осложняют схему управления двигателями при независимом их повороте и вращении равновеликих несущих винтов на переходных и вертолетных режимах полета. Второй - это то, что при висении поток от всех тянущих винтов, обдувая соответствующие консоли тандемных крыльев от их законцовок, создает из-за отсутствия внешних закрылок крыльев значительную потерю каждого винта (≈12%) в вертикальной их тяге, затормаживается и большие скорости потока, отбрасываемого от них, предопределяют образование вихревых колец, которые на низких скоростях снижения могут резко уменьшать силу тяги задних поворотных винтов и создавать этими несущими винтами ситуацию неуправляемого пикирования, что снижает стабильность управления и безопасность. Третий - это то, что равновеликие винты с восемью двигателями одинаковой мощности предопределяют равноудаленное размещение группы левых и группы правых несущих винтов от центра масс, что, уменьшая длину фюзеляжа до 7,6 м, приводит из-за наличия неразвитого киля к ухудшению путевой управляемости на переходных и, особенно, крейсерских режимах горизонтального полета.
Известен (см. https://www.terrafugia.com/) вертикально взлетающий электромобиль-трансформер проекта TF-X фирмы "Terrafugia" (США), имеющий складное высокорасположенное крыло, на концах которого размещены поворотные гондолы с электромоторами и винтами, содержит гибридную силовую электроустановку с поршневым двигателем (ПД), приводящим во вращение толкающий импеллер или генератор для подзарядки батарей, систему управления и аккумуляторы, четырехопорное колесное шасси, неубирающееся, имеющее задние приводные мотор-колеса.
Признаки совпадающие - наличие для выполнения ВВП поворотных гондол с электромоторами и винтами, смонтированными на концах складного высокорасположенного крыла типа чайка и горизонтального полета в конфигурации самолета со сложенными вдоль гондол лопастями тянущих винтов, обеспечиваемого толкающим импеллером, приводимым ПД мощностью 300 л.с., но и четырехопорным неубирающимся колесным шасси, имеющим задние приводные мотор-колеса, когда на земле крылья и лопастные гондолы сложатся и TF-X превратится в электромобиль. Системой ВВП управляют 32 электромотора с общей мощностью 447×2 кВт, сгруппированных в двух гондолах с тянущими винтами. Вертикально взлетающий аэромобиль-трансформер может подниматься на высоту в диапазоне 500…3500 м, наличие крыла позволяет при крейсерском полете в самолетной конфигурации находится без подзарядки батарей в воздухе до 2,5 часов и достичь скорости 320 км/ч и дальности 800 км.
Причины, препятствующие поставленной задаче: первая - это то, что расположение поворотных гондол на концах складного крыла типа чайка и винтами предопределяет конструктивно сложное прямое крыло, оснащенное двумя сложными системами поворота и складывания лопастей поворотных винтов, что усложняет конструкцию и уменьшает надежность. Вторая - это то, что при висении поток от двух поворотных тянущих винтов, обдувая консоли складного крыла с удлинением λ=3,0, создает из-за отсутствия внешних его закрылок значительную потерю каждого винта (≈20%) в вертикальной их тяге, затормаживается и большие скорости потока, отбрасываемого от них, предопределяют образование вихревых колец, которые на низких скоростях снижения могут резко уменьшать силу тяги передних винтов и создавать задними двумя винтами ситуацию неуправляемого падения, что снижает стабильность управления и безопасность. Третья - это то, что для старта вокруг TF-X понадобится взлетная зона площадью 67,72 м2 при D=9,288 м, так как раскладывающиеся крылья и винты с создаваемыми ими потоками воздуха исключают обычный взлет с шоссе из-за невозможности соблюдения норм безопасности. Кроме того, отсутствие вертикального киля ухудшает также путевую устойчивость на переходных и, особенно, на крейсерских горизонтальных режимах полета в самолетной его конфигурации.
Наиболее близким (см. http://www. avxcorporation.com) к предлагаемому изобретению является гибридный аэромобиль "AVX Aircar" компании «AVX Aircraft Company» (США), имеющий двухвинтовую соосную схему с несущими винтами и силовую установку (СУ) с двигателями, передающими крутящий момент через систему трансмиссии на несущие трехлопастные и тяговые винты в кольцевых каналах, и четырехопорное неубирающееся колесное шасси с электрическими мотор-колесами для передвижения по земле со сложенными винтами.
Летающий внедорожник, получивший название "AVX Aircar", представляет собой четырехместный внедорожник, который дополнительно оборудован двумя складными соосными винтами и двумя хвостовыми винтами в кольцевых каналах. По дороге Aircar может ехать со скоростью до 130 км/ч, а лететь - 225 км/ч. Как заявляет производитель, переход между режимами занимает не более минуты. При этом Aircar может садиться и на бездорожье. Грузоподъемность нового транспортного средства для американских военных составляет 470 кг. Винтокрылая конфигурация "AVX Aircar" позволяет при крейсерском полете подниматься ему на высоту до 3045 м и на одном баке летающий внедорожник может преодолеть до 460 км за 2,1 часа полета.
Причины, препятствующие поставленной задаче: первая - это то, что гибридный аэромобиль с двухвинтовой соосной схемой и тяговыми винтами в задних кольцевых каналах, используемыми только на крейсерских режимах полета, увеличивает паразитную массу при выполнении ВВП и уменьшает весовую отдачу и радиус действия. Вторая - это то, что отсутствие вертикального оперения создает недостаточный запас путевой устойчивости, особенно, на скоростях горизонтального полета свыше 180 км/ч, что приводит к увеличению рысканья, известного как «голландский шаг», который имеет тенденцию к его увеличению с ростом взлетного его веса и отсутствию несущего крыла. Третья - это то, что при висении соосное расположение несущих винтов изменяемого шага и с управлением циклического шага каждого из них значительно осложняет их конструкцию, а постоянные вибрации, возникающие при работе автоматов их перекосов, создают неблагоприятные условия для работы других механизмов и оборудования. Четвертая - это то, что соосное расположение двух винтов с автоматами перекосов их лопастей значительно увеличивает массу узлов управления, главного редуктора и его высоту (обеспечивая разнос между лопастями нижнего и верхнего винтов 9,7% от их диаметра). Пятая - это то, что в двухвинтовой соосной схеме с полужестким креплением лопастей имеют место неблагоприятное взаимное влияние (индуктивные потери) соосных несущих винтов с автоматами перекоса, которые в отдельных случаях могут приводить к их перехлесту. Все это обеспечивает более высокий удельный расход топлива и ограничивает дальнейшее повышение скорости и дальности полета без возможности использования самолетной конфигурации.
Предлагаемым изобретением решается задача в указанном выше известном гибридном аэромобиле "AVX Aircar" исключения узлов складывания лопастей несущих винтов и уменьшения потерь в вертикальной тяги несущих винтов из-за наличия межфюзеляжного пространства и походной высоты при его передвижении по земле, увеличения весовой отдачи, повышения скорости и дальности полета, упрощения курсовой и поперечно-продольной управляемости на режимах ВВП и зависания.
Отличительными признаками предлагаемого изобретения от указанного выше известного гибридного аэромобиля "AVX Aircar", наиболее близкого к нему, являются наличие того, что он выполнен по схеме двойного фюзеляжа и с тремя тандемными крыльями, каждое из которых малого удлинения низко- и среднерасположенные межфюзеляжные переднее и заднее крылья соответственно (МПК и МЗК) и высокорасположенное между двумя последними - межфюзеляжное среднее крыло (МСК), и концепции крупномерных несущих фюзеляжей прямоугольного сечения с закругленными углами, имеющих аэродинамический профиль крыла с относительной их толщиной, обеспечивающей возможность в каждом фюзеляже размещения кабины, пассажирского салона и двигательного отсека соответственно в передней, центральной и задней его частях, но и расположения в упомянутых двухвинтовых соосно-симметричной несущей системе (ССНС) и движительно-рулевой системе (ДРС) соответственно по оси симметрии и по обе стороны от нее в центральной и кормовой частях на пилоне в изломе поперечного V МСК и на концах несущих фюзеляжей, включающих над центром масс два с противоположным вращением однолопастных несущих винта (НВ), обеспечивающих только вертикальный и короткий взлет/посадку (ВВП и КВП), и толкающие винты в задних кольцевых каналах (ЗКК), интегрированных с задними кромками несущих фюзеляжей и МЗК как для продольно-поперечного управления и создания управляющих моментов при выполнении ВВП и зависания, так и маршевой тяги при скоростном горизонтальном полете и зафиксированных лопастях-крыльях однолопастных HB, размещенных на профилированном пилоне, и снабжен возможностью преобразования полетной его конфигурации после выполнения технологии КВП или ВВП с винтокрыла или вертолета с ССНС-Х2 и ДРС-Х2 в соответствующий скоростной винтокрыл или самолет с маршевой ДРС-Х2 соответственно с однолопастными НВ, работающими на режимах близких к их авторотации или при зафиксированных лопастях-крыльях верхнего и нижнего однолопастных НВ, левые и правые лопасти которых остановлены и зафиксированы перпендикулярно к плоскости симметрии и вынесены от последней наружу так, что их передние кромки размещены перпендикулярно к потоку, увеличивая площадь тандемных крыльев и несущую их способность совместно с несущими фюзеляжами, но и образуя с ними схему свободно несущего продольного триплана-тандема, используемого только для скоростного горизонтального полета, или после вертикальной посадки на землю и при остановке лопастей-крыльев его НВ и соответствующем их фиксировании вдоль оси симметрии - передвижения по земле, так и обратно, при этом нижний и верхний однолопастные НВ, закрепленные на соответствующих выходных валах главного редуктора, верхний полый из которых снабжен полой неподвижной опорой, установленной соосно внутри последнего, которая жестко закреплена своим нижним концом к корпусу главного редуктора, а верхним сцентрирована относительно его верхнего вала при помощи подшипникового узла так, что выступающая из вала верхняя часть опоры закреплена совместно с верхним каплевидным обтекателем, имеющим в верхней автоматически раскрываемой части контейнер с вытяжным и основным парашютами, стропы последнего закреплены на верхней части полой опоры, что обеспечивает, защищая от ударной нагрузки совместно с энергопоглощающими стойками колесного шасси, допустимое уменьшение скорости снижения до 7 м/с, что смягчает приземление при аварийной посадке на парашютной спасательной системе, причем однолопастные НВ выполнены без управления циклического изменения их шага и с жестким креплением их лопастей и профилированных противовесов, но и создания от однолопастных НВ полной компенсации реактивных крутящих моментов при противоположном направлении вращения между винтами в разнесенной паре по высоте НВ, например при виде сверху верхний и нижний однолопастные НВ вращаются соответственно по часовой и против часовой стрелки так, что соответствующие наступающие их лопасти проходили над левым и правым бортами фюзеляжей от кормовой к носовой их частям и, как следствие, обеспечивают устранение гироскопического эффекта, гармоничное сочетание продольно-поперечного управления при выполнении ВВП и зависания и создание более плавного обтекания воздушным потоком несущих фюзеляжей, при этом МПК, стреловидное МЗК и трапециевидное МСК имеют разновеликие площади, которые составляют соответственно 27%, 29% и 44% от общей площади трех тандемных межфюзеляжных крыльев, причем передняя серповидная в плане кромка ПМК, вынесенная вперед за соответствующие части несущих фюзеляжей, образует передний бампер, при этом полностью синхронно-сбалансированная ССНС-Х2, работающая совместно с тремя тандемными крыльями и толкающими винтами ДРС-Х2 в левом и правом ЗКК, смонтированных по продольным осям соответствующих фюзеляжей, обдувают воздушным потоком верхние и нижние поверхности несущих фюзеляжей и создают возможность повышения несущей их способности и, особенно, когда продольная ось каждого ЗКК при виде сбоку размещена либо выше, либо по продольной линии, проходящей соответственно над вертикальным центром масс, либо по его центру и, следовательно, уменьшает возможность возникновения кабрирующего момента, причем толкающие флюгерно-реверсивные винты в ЗКК имеют как жесткое крепление лопастей, так и возможность изменения общего их шага и установки их лопастей во флюгерное положение после их остановки и фиксации для осуществления аварийного режима посадки с авторотирующими НВ в случае отказа двигателей СУ, но и возможность создания ими маршевой тяги при горизонтальном скоростном полете, а также прямой и обратной горизонтальной тяги ДРС-Х2 при выполнении ВВП и зависания для поступательного соответствующего перемещения вдоль продольной его оси и выполнения интенсивной обдувки после предварительного синфазного и дифференциального отклонения двух верхних с двумя нижними и двух левых с двумя правыми развитыми элевонами ЗКК, изменяющими соответственно продольную и поперечную балансировку при выполнении ВВП и зависания или горизонтального полета и установленными на выходе каждого ЗКК снизу и сверху на величину половины радиуса толкающего винта от центра ЗКК, внешние концы которых отогнуты к его центру и имеют развитые отгибы со стреловидностью по передней кромке, обеспечивающей отклонение элевонов вверх-вниз на углы атаки ±15°, при этом система трансмиссии обеспечивает передачу мощности от двух, например, роторно-поршневых двигателей (РПД), имеющих передний вывод вала для отбора взлетной их мощности, смонтированы в задней части соответствующих фюзеляжей и связаны посредством муфт сцепления с Г-образными в плане угловыми редукторами, образующими левую и правую синхронизирующие системы, передающие крутящий момент от РПД к главному многоуровневому кормовому крестообразному в плане редуктору, выходные продольные валы которого связаны посредством трех муфт сцепления как нижней из них с входным валом ведущего моста задних колес шасси, размещенного с осью последних в профилированных обтекателях, так и верхней или средней из них соответственно с передним наклонно-продольным входным валом соосного редуктора однолопастных НВ, смонтированного в изломах поперечного V в центроплане МСК, или с задним входным валом Т-образного в плане промежуточного редуктора толкающих винтов ДРС-Х2, причем при выполнении ВВП и зависания главным редуктором обеспечивается плавное перераспределение располагаемой взлетной мощности СУ к ССНС-Х2 и ДРС-Х2 соответственно 90% и 10% и реализуются вертолетные режимы полета при удельной нагрузке на мощность СУ, равной ρN=3,0 кг/л.с, а на самолетных режимах полета при зафиксированных соответствующим образом лопастях-крыльях верхнего и нижнего однолопастных НВ главным редуктором перераспределяется 80% от взлетной мощности СУ системой трансмиссии только на толкающие винты в ЗКК, но и обратно, причем на земле в походной его конфигурации однолопастные винты в ССНС-Х2 после их остановки и фиксации с углом установки каждой лопасти ϕ=0° так, что верхняя с нижней лопастями-крыльями и их противовесы направлены в противоположные стороны соответственно назад и вперед от центра масс, размещены при виде сверху по оси симметрии так, что сами лопасти-крылья зафиксированы между ЗКК, а их противовесы - перед задней кромкой МПК, при этом после выполнения посадки на землю для обеспечения необходимых режимов поездки системой трансмиссии передается соответствующая от 0% до 50% мощность СУ на задние приводные колеса упомянутого четырехопорного колесного шасси, имеющего переднюю пару управляемых поворотных колес для наземного его передвижения после соответствующего складывания концевых частей стабилизатора при зафиксированных лопастях-крыльях соответствующим образом в конфигурацию автомобиля, который содержит в левом и правом фюзеляжах соответствующие кабины, имеющие как раздельные органы управления для передвижения по земле и выполнения взлета, полета и посадки, так и тандемное расположение энергопоглощающих кресел, предназначенных соответственно для водителя с двумя пассажирами и для пилота с двумя пассажирами, но и имеет с обеих сторон и по внешним бортам фюзеляжей по две соответствующие двери, пассажирские из которых сдвижные.
Кроме того, упомянутые соосные однолопастные НВ с профилированными противовесами имеют радиус (rпп), определяемый из соотношения: rпп=0,3⋅RHB, м (где RHB - радиус НВ), при этом каждый профилированный противовес, выполненный с обратным в плане сужением, имеет корневую и концевую хорды соответственно равновеликую и в 1,2 раза больше корневой хорды несущего винта, имеющего в свою очередь концевую хорду лопасти-крыла в 1,2 раза меньше его корневой хорды, снабжен законцовкой, имеющей внешнюю дугообразную и зеркально расположенную внутреннюю линии, образующие эллипсовидную в плане форму с большей ее осью, сопрягаемой с соответствующими кромками профилированного противовеса, образуя удобообтекаемую его форму, причем МСК, выполненное с возможностью вертикального совместного его перемещения с пилоном и однолопастными НВ вверх/вниз соответственно для полетной/походной конфигурации, снабжен в корневых частях двумя парами вертикальных направляющих, левым и правым синхронизированными винтовыми домкратами с электромеханическим приводом, при этом упомянутый наклонно-продольный соединительный вал, связывающий выходной вал главного редуктора с входным валом редуктора соосных однолопастных НВ выполнен в виде карданного телескопического вала с двумя карданными шарнирами.
Кроме того, упомянутые соосные нижний и верхний однолопастные НВ, выполненные с системой обтекателей, включающей как обтекатели втулок, каждый из которых имеет верхний и нижний выпуклые профили, имеющие эллиптическую конфигурацию, так и обтекатель колонки соосных валов, размещенный между соответствующими обтекателями втулок и уменьшающий общее сопротивление и разнос между лопастью нижнего и верхнего однолопастных винтов не менее 14% от их радиуса, при этом обтекатель колонки валов, имеющий при виде сверху каплевидную форму и систему предотвращения неуправляемого вращения обтекателя вала вокруг оси вращения, смонтирован так, что имеет верхний и нижний щелевые зазоры, выполненные зеркально эллиптическим поверхностям соответствующих обтекателей втулок соосных НВ, причем обтекатель колонки соосных НВ, облегчающий обтекание, уменьшающий разделение потока и сопротивление, снабжен при виде сбоку горизонтальными аэродинамическими равновеликими гребнями, параллельно смонтированными по три с каждой задней боковой его вертикальной поверхности так, что каждый центральный, установленный по ее середине и ближе к задней его кромке, имеющей обратную стреловидность, а верхний и нижний аэродинамические гребни в свою очередь установлены дальше от нее и при этом равноудалены от центрального.
Кроме того, он выполнен с упомянутыми левым и правым местами экипажа соответственно для пилота и для водителя, при этом на упомянутом каждом несущем фюзеляже спереди на верхней части его носка перед стеклом кабины имеется по меньшей мере три равновеликих аэродинамических гребня, параллельно смонтированных, улучшая его обтекание, так чтобы центральный размещался по продольной оси ближе к лобовому стеклу, а левый и правый аэродинамические гребни в свою очередь установлены дальше от нее и при этом равноудалены от центрального.
Кроме того, упомянутые РПД имеют в системе трансмиссии возможность как передачи мощности через коробку передач на привод упомянутых управляемых поворотных передних колес четырехопорного колесного шасси, используемого для наземного его передвижения после соответствующей трансформации в конфигурации гибридного автомобиля, так и сочетаться с семидиапазонной трансмиссией: пять передач предназначены для езды и вращения генератора (четыре передние и одна задняя), шестая передает крутящий момент на привод НВ и толкающих винтов при выполнении ВВП и зависания, а седьмая ступень одновременно вращает толкающие винты и приводные передние колеса для выполнения укороченного взлета, а после взлета и отключения трансмиссии от привода колес, затем вращает и генератор после его подключения к ней при скоростном горизонтальном полете в самолетной конфигурации.
Кроме того, при выполнении ВВП для повышения безопасности на торцах законцовок, упомянутых МПК и внешних бортах по оси каждого ЗКК имеются сигнальные огни и датчики сближения, предупреждающие звуковой сиреной о недопустимом приближении с посторонними объектами, при этом автономные системы управления, включающие автопилот для осуществления самостоятельного взлета после выбора и подтверждения маршрута и систему экстренной автоматической посадки, которая включится в том случае, если пилот не будет реагировать на запросы бортового компьютера, но и следящие системы, которые идентифицируют появившиеся на пути перелета препятствия и дадут команду на их автоматический облет, а затем обеспечат мягкую посадку в заданной точке.
Благодаря наличию этих признаков, позволяющих освоить аэромобиль вертикального взлета (АМВВ), выполненный по схеме двойного фюзеляжа и с тремя тандемными крыльями, каждое из которых малого удлинения низко- и средне расположенные межфюзеляжные переднее и заднее крылья соответственно (МПК и МЗК) и высокорасположенное между двумя последними - межфюзеляжное среднее крыло (МСК) и концепции крупномерных несущих фюзеляжей прямоугольного сечения с закругленными углами, имеющих аэродинамический профиль крыла с относительной их толщиной, обеспечивающей возможность в каждом фюзеляже размещения кабины, пассажирского салона и двигательного отсека соответственно в передней, центральной и задней его частях, но и расположения в упомянутых двухвинтовых соосно-симметричной несущей системе (ССНС) и движительно-рулевой системе (ДРС) соответственно по оси симметрии и по обе стороны от нее в центральной и кормовой частях на пилоне в изломе поперечного V МСК и на концах несущих фюзеляжей, включающих над центром масс два с противоположным вращением однолопастных несущих винта (НВ), обеспечивающих только ВВП и КВП, и толкающие винты в задних кольцевых каналах (ЗКК), интегрированных с задними кромками несущих фюзеляжей и МЗК как для продольно-поперечного управления и создания управляющих моментов при выполнении ВВП и зависания, так и маршевой тяги при скоростном горизонтальном полете, и зафиксированных лопастях-крыльях однолопастных НВ, размещенных на профилированном пилоне, и снабжен возможностью преобразования полетной его конфигурации после выполнении технологии КВП или ВВП с винтокрыла или вертолета с ССНС-Х2 и ДРС-Х2 в соответствующий скоростной винтокрыл или самолет с маршевой ДРС-Х2 соответственно с однолопастными НВ, работающими на режимах, близких к их авторотации, или при зафиксированных лопастях-крыльях верхнего и нижнего однолопастных НВ, левые и правые лопасти которых остановлены и зафиксированы перпендикулярно к плоскости симметрии и вынесены от последней наружу так, что их передние кромки размещены перпендикулярно к потоку, увеличивая площадь тандемных крыльев и несущую их способность совместно с несущими фюзеляжами, но и образуя с ними схему свободно несущего продольного триплана-тандема, используемого только для скоростного горизонтального полета, или после вертикальной посадки на землю и при остановке лопастей-крыльев его НВ и соответствующем их фиксировании вдоль оси симметрии - передвижения по земле, так и обратно, при этом нижний и верхний однолопастные НВ, закрепленные на соответствующих выходных валах главного редуктора, верхний полый из которых снабжен полой неподвижной опорой, установленной соосно внутри последнего, которая жестко закреплена своим нижним концом к корпусу главного редуктора, а верхним сцентрирована относительно его верхнего вала при помощи подшипникового узла так, что выступающая из вала верхняя часть опоры закреплена совместно с верхним каплевидным обтекателем, имеющим в верхней автоматически раскрываемой части контейнер с вытяжным и основным парашютами, стропы последнего закреплены на верхней части полой опоры, что обеспечивает, защищая от ударной нагрузки совместно с энергопоглощающими стойками колесного шасси, допустимое уменьшение скорости снижения до 7 м/с, что смягчает приземление при аварийной посадке на парашютной спасательной системе, причем однолопастные НВ выполнены без управления циклического изменения их шага и с жестким креплением их лопастей и профилированных противовесов, но и создания от однолопастных НВ полной компенсации реактивных крутящих моментов при противоположном направлении вращения между винтами в разнесенной паре по высоте НВ, например при виде сверху верхний и нижний однолопастные НВ вращаются соответственно по часовой и против часовой стрелки так, что соответствующие наступающие их лопасти проходили над левым и правым бортами фюзеляжей от кормовой к носовой их частям и, как следствие, обеспечивают устранение гироскопического эффекта, гармоничное сочетание продольно-поперечного управления при выполнении ВВП и зависания и создание более плавного обтекания воздушным потоком несущих фюзеляжей, при этом МПК, стреловидное МЗК и трапециевидное МСК имеют разновеликие площади, которые составляют соответственно 27%, 29% и 44% от общей площади трех тандемных межфюзеляжных крыльев, причем передняя серповидная в плане кромка ПМК, вынесенная вперед за соответствующие части несущих фюзеляжей, образует передний бампер, при этом полностью синхронно-сбалансированная ССНС-Х2, работающая совместно с тремя тандемными крыльями и толкающими винтами ДРС-Х2 в левом и правом ЗКК, смонтированных по продольным осям соответствующих фюзеляжей, обдувают воздушным потоком верхние и нижние поверхности несущих фюзеляжей и создают возможность повышения несущей их способности и, особенно, когда продольная ось каждого ЗКК при виде сбоку размещена либо выше, либо по продольной линии, проходящей соответственно над вертикальным центром масс, либо по его центру и, следовательно, уменьшает возможность возникновения кабрирующего момента, причем толкающие флюгерно-реверсивные винты в ЗКК имеют как жесткое крепление лопастей, так и возможность изменения общего их шага и установки их лопастей во флюгерное положение после их остановки и фиксации для осуществления аварийного режима посадки с авторотирующими НВ в случае отказа двигателей СУ, но и возможность создания ими маршевой тяги при горизонтальном скоростном полете, а также прямой и обратной горизонтальной тяги ДРС-Х2 при выполнении ВВП и зависания для поступательного соответствующего перемещения вдоль продольной его оси и выполнения интенсивной обдувки после предварительного синфазного и дифференциального отклонения двух верхних с двумя нижними и двух левых с двумя правыми развитыми элевонами ЗКК, изменяющими соответственно продольную и поперечную балансировку при выполнении ВВП и зависания или горизонтального полета и установленными на выходе каждого ЗКК снизу и сверху на величину половины радиуса толкающего винта от центра ЗКК, внешние концы которых отогнуты к его центру и имеют развитые отгибы со стреловидностью по передней кромке, обеспечивающей отклонение элевонов вверх-вниз на углы атаки ±15°, при этом система трансмиссии обеспечивает передачу мощности от двух, например, роторно-поршневых двигателей (РПД), имеющих передний вывод вала для отбора взлетной их мощности, смонтированы в задней части соответствующих фюзеляжей и связаны посредством муфт сцепления с Г-образными в плане угловыми редукторами, образующими левую и правую синхронизирующие системы, передающие крутящий момент от РПД к главному многоуровневому кормовому крестообразному в плане редуктору, выходные продольные валы которого связаны посредством трех муфт сцепления как нижней из них с входным валом ведущего моста задних колес шасси, размещенного с осью последних в профилированных обтекателях, так и верхней или средней из них соответственно с передним наклонно-продольным входным валом соосного редуктора однолопастных НВ, смонтированного в изломах поперечного V в центроплане МСК, или с задним входным валом Т-образного в плане промежуточного редуктора толкающих винтов ДРС-Х2, причем при выполнении ВВП и зависания главным редуктором обеспечивается плавное перераспределение располагаемой взлетной мощности СУ к ССНС-Х2 и ДРС-Х2 соответственно 90% и 10% и реализуются вертолетные режимы полета при удельной нагрузке на мощность СУ, равной ρN=3,0 кг/л.с., а на самолетных режимах полета при зафиксированных соответствующим образом лопастях-крыльях верхнего и нижнего однолопастных НВ главным редуктором перераспределяется 80% от взлетной мощности СУ системой трансмиссии только на толкающие винты в ЗКК, но и обратно, причем на земле в походной его конфигурации однолопастные винты в ССНС-Х2 после их остановки и фиксации с углом установки каждой лопасти ϕ=0° так, что верхняя с нижней лопастями-крыльями и их противовесы направлены в противоположные стороны соответственно назад и вперед от центра масс, размещены при виде сверху по оси симметрии так, что сами лопасти-крылья зафиксированы между ЗКК, а их противовесы - перед задней кромкой МПК, при этом после выполнения посадки на землю для обеспечения необходимых режимов поездки системой трансмиссии передается соответствующая от 0% до 50% мощность СУ на задние приводные колеса упомянутого четырехопорного колесного шасси, имеющего переднюю пару управляемых поворотных колес для наземного его передвижения после соответствующего складывания концевых частей стабилизатора при зафиксированных лопастях-крыльях соответствующим образом в конфигурацию автомобиля, который содержит в левом и правом фюзеляжах соответствующие кабины, имеющие как раздельные органы управления для передвижения по земле и выполнения взлета, полета и посадки, так и тандемное расположение энергопоглощающих кресел, предназначенных соответственно для водителя с двумя пассажирами и для пилота с двумя пассажирами, но и имеет с обеих сторон и по внешним бортам фюзеляжей по две соответствующие двери, пассажирские из которых сдвижные. Все это позволит в АМВВ и при переходных маневрах повысить продольно-поперечную управляемость, а размещение СУ с РПД в задней части фюзеляжей обеспечит упрощение системы трансмиссии. Это позволит также повысить безопасность полетов и использовать РПД меньших габаритов в их поперечнике, что уменьшит как мидель несущих фюзеляжей, так и их аэродинамическое сопротивление. Применение однолопастных соосных НВ позволит достичь более высокую аэродинамическую эффективность, несмотря на вредное сопротивление профилированного балансировочного удобообтекаемого противовеса. Для предотвращения нежелательных вибраций однолопастной жесткий НВ работает с большой окружной скоростью. Поэтому основной режим работы однолопастного НВ - это вертикальные перемещения АМВВ. В случае появления косого обдува тяга винта изменяется циклически. Поэтому жесткое крепление лопасти улучшает управляемость, особенно соосных однолопастных НВ. В синхронизированных соосных однолопастных НВ моменты Мкрен и Мпрод от верхнего и нижнего однолопастных НВ при передаче на фюзеляж через МСК взаимно уничтожаются. Поэтому коэффициент аэродинамической выгодности однолопастных НВ в симметричной двухвинтовой соосной схеме будет в 1,26-1,28 выше, чем у вертолетного двух- или трехлопастного одного НВ. Что позволит уменьшить вес планера, повысить весовую отдачу и улучшить на 31-33% топливную эффективность в сравнении с гибридным аэромобилем "AVX Aircar". Более того, все это позволит также в сравнении с традиционными крыльями самолета, имеющими предкрылки и закрылки, повысить маневренность на малых скоростях полета и при переходных маневрах, но и снизить скорость сваливания и взлетную за счет увеличения в 1,15-1,2 раза коэффициента поднятия схемы триплан-тандем, имеющей совместно с лопастями-крыльями в производстве подъемной силы при взлетно-посадочных режимах полета АМВВ и опционально-управляемых беспилотных АМВВ.
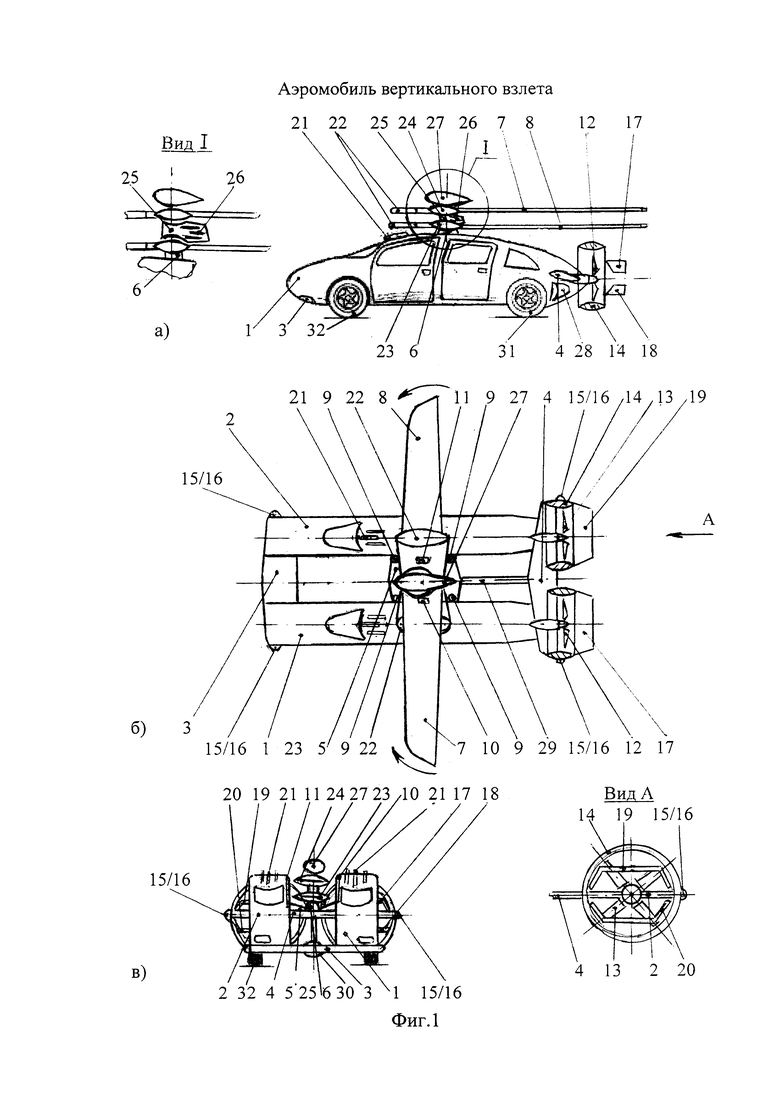
Предлагаемое изобретение предпочтительного шестиместного АМВВ, выполненного по схеме с тремя тандемными крыльями и концепции ССНС-Х2 с ДРС-Х2, представлено на фиг. 1 с двумя ЗКК и элевонами на общих видах сбоку, сверху и спереди соответственно а), б) и в) с вариантами его использования:
а) в полетной конфигурации вертолета с соосными НВ и толкающими винтами в ЗКК при работающих однолопастных НВ, лопасти которых синхронно повернуты на 270° от 0°, когда они размещены перпендикулярно оси симметрии и их передние кромки также симметрично расположены перпендикулярно потоку;
б) в полетной конфигурации самолета схемы триплан-тандем, имеющей МПК, МЗК и МСК совместно с зафиксированными лопастями-крыльями, размещенными перпендикулярно оси симметрии и маршевой тягой от толкающих винтов в двух ЗКК;
в) в конфигурации автомобиля с опущенным вниз в межфюзеляжное пространство МСК и его пилоном с НВ и их зафиксированными лопастями-крыльями, размещенными назад между двух ЗКК, а их противовесам - вперед к задней кромке МПК.
Преобразуемый АМВВ, выполненный по схеме двойного фюзеляжа и с тремя тандемными малого удлинения крыльями и представленный на фиг. 1, содержит левый 1 и правый 2 фюзеляжи, которые конструктивно объединены низко- и среднерасположенными крыльями соответственно МПК 3 и МЗК 4, но и между ними МСК 5. Трапециевидное МСК 5, выполненное с возможностью вертикального совместного его перемещения с пилоном 6 и однолопастными соосными верхним 7 и нижним 8 НВ вверх/вниз, снабжено в корневых частях двумя парами вертикальных направляющих 9, левым 10 и правым 11 синхронизированными винтовыми домкратами. На МЗК 4 по продольным осям фюзеляжей 1-2 установлены толкающие винты левый 12 и правый 13 в двух ЗКК 14, интегрированных с задними кромками несущих фюзеляжей 1-2 и МЗК 4. Для повышения безопасности на торцах законцовок МПК 3 и внешних бортах по оси каждого ЗКК 14 имеются сигнальные огни 15 и датчики сближения 16 (см. фиг. 1б). На выходе каждого ЗКК 14 имеются две пары элевонов: левая - это верхний 17 с нижним 18, и правая пара - это верхний 19 с нижним 20, снабженные развитыми отгибами со стреловидностью по передней кромке, обеспечивающей отклонение элевонов 17-18 и 19-20 вверх-вниз на углы атаки ±15°. На каждом несущем фюзеляже 1-2 спереди на верхней части его носка перед стеклом кабины имеется три равновеликих аэродинамических гребня 21, параллельно смонтированных, улучшая его обтекание. Нижний 8 и верхний 7 НВ, снабженные противовесами 22, имеют обтекатели втулок 23 и 24 обтекатель колонки 25 соосных валов, снабжен при виде сбоку горизонтальными аэродинамическими равновеликими гребнями 26, параллельно смонтированными по три с каждой задней боковой его вертикальной поверхности. Во время аварийной посадки при выполнении ВВП и отказе двигателей СУ его однолопастные 7-8 НВ работают на режиме авторотации, разгружают тандемные крылья 3-5, а во время горизонтального полета и отказе его двух РПД лопасти толкающих винтов 12-13 флюгируются для предотвращения авторотации с одновременным автоматическим раскрыванием отсека на верхней части каплевидного обтекателя 27 и контейнера с вытяжным и основным парашютами, обеспечивающими допустимое уменьшение скорости снижения до 7 м/с (не показано). Однолопастные НВ 7-8 ССНС-Х2 выполнены без автоматов перекоса и с жестким креплением их лопастей и профилированных противовесов 22, но и возможностью создания от НВ полной компенсации реактивных крутящих моментов при противоположном направлении вращения между НВ в соосной группе верхнего 7 и нижнего 8, например, при виде сверху вращающиеся по часовой и против часовой стрелки соответственно (см. фиг. 1б). Двухдвигательная СУ имеет в задних отсеках 28 фюзеляжей 1-2 РПД, выполненные для отбора их взлетной мощности с передним выводом вала. Каждый из РПД, образуя с соответствующими соединительными валами и главным редуктором синхронизирующую систему, снабжен муфтой сцепления (не показаны). Передача взлетной мощности от двух РПД к ССНС-Х2 и ДРС-Х2 обеспечивается трансмиссией, имеющей: главный крестообразный в плане редуктор (не показаны) с карданным телескопическим продольно-наклонным валом 29 для соосных 7-8 НВ и продольными левым и правым валами для толкающих соответствующих винтов 12 и 13 в ЗКК 14 на МЗК 4 (см фиг.1б-в) и нижним валом ведущего моста 30, обеспечивающего привод задних колес 31 четырехопорного колесного шасси, имеющего переднюю пару управляемых поворотных колес 32 для наземного его передвижения с зафиксированными лопастями-крыльями соосных 7-8 НВ и опущенными в межфюзеляжное пространство вниз совместно с МСК 5 (см фиг. 1в) в конфигурации автомобиля с габаритными, поворотными огнями и фарами (не показано). Для размещения целевой нагрузки в фюзеляжах 1-2 предусмотрены две закрытые, например, трехместные кабины с расположением кресел в каждом из них тандемом. Планер и пассажирские кабины выполнены из композитных материалов и углеродного волокна, каркас и несущие элементы фюзеляжа - из сплавов на основе алюминия.
Управление АМВВ обеспечивается общим и дифференциальным изменением шага соосной группы 7-8 НВ и отклонением элевонов 17-18 и 19-20 в ЗКК 14. При крейсерском полете подъемная сила создается тандемными крыльями 3-5 и зафиксированными лопастями-крыльями НВ 7-8, остановленными соответственно над фюзеляжами 1-2 и под обтекателем 27 ПСС (см. фиг. 1a), горизонтальная тяга - толкающими винтами 12-13 в ЗКК 14, на режиме висения только соосными НВ 7-8, на режиме перехода - крыльями 3-5 и с НВ 7-8. При переходе к вертикальному взлету-посадке (висению) МСК 5 совместно с НВ 7-8 на пилоне 6 перемещаются вверх (см. фиг. 1а). После создания подъемной тяги соосными 7-8 НВ обеспечиваются вертолетные режимы полета с использованием рулевой ДРС-Х2. Развитые элевоны 17-18 и 19-20 отклоняются от горизонтального положения вверх и вниз на углы ±15° при взлетных и посадочных режимах полета и при выполнении технологии КВП на самолетных режимах полета АМВВ. При висении на вертолетных режимах полета путевое управление АМВВ осуществляется дифференциальным изменением шага соосных верхнего 7 и нижнего 8 НВ. При выполнении ВВП и зависания продольное и поперечное управление осуществляется предварительным синфазным и дифференциальным отклонением элевонов двух верхних 17-19 с двумя нижними 18-20 и двух левых 17-18 и двух правых 19-20 в ЗКК 14 соответственно, обеспечивающими соответствующую балансировку при их обдувке толкающими винтами 12 и 13 в ДРС-Х2 с последующим соответствующим изменении их шага. После вертикального взлета и набора высоты и производится разгон в винтокрылой конфигурации. Затем для перехода на самолетный горизонтальный режим полета лопасти-крылья 7-8 однолопастных НВ синхронно останавливаются и фиксируются перпендикулярно плоскости симметрии (см. фиг. 1б), и производится скоростной полет в самолетной полетной конфигурации, при котором путевое управление обеспечивается различной по величине маршевой тягой толкающих винтов левым 12 и правым 13 в ЗКК 14. Продольное и поперечное управление осуществляется синфазным и дифференциальным отклонением элевонов двух верхних 17-19 с двумя нижними 18-20 и двух левых 17-18 и двух правых 19-20 в ЗКК 14 соответственно.
Таким образом, АМВВ с одновинтовой ДРС-Х2 и симметричной двухвинтовой ССНС-Х2 имеет толкающие винты в ЗКК и однолопастные соосные НВ, нижний и верхний из которых установлены над МСК и под обтекателем парашютной спасательной системы, и представляет собой гибридный аэромобиль ВВП, который изменяет свою полетную конфигурацию только благодаря фиксации симметричных поверхностей лопастей-крыльев соосных НВ относительно продольной оси. Кроме того, двухфюзеляжная схема с несущими фюзеляжами и размещение в задних их частях двух РПД упрощает систему трансмиссии и позволяет в межфюзеляжном пространстве разместить на МСК системы его опускания и поднятия с однолопастными НВ, что позволит уменьшить почти на 22-24% его походную высоту с обтекателем ПСС. Флюгерно-реверсивный толкающий винт в ЗКК, создающий горизонтальную и маршевую тягу, обеспечивает необходимые управляющие моменты при вертолетных и самолетных режимах полета, но и уменьшает дистанцию при посадке с пробегом. Аэродинамическая схема триплан-тандем с МПК, МСК и ЗСК, создавая за счет увеличения в 1,15-1,2 раза коэффициент поднятия такой схемы совместно с лопастями-крыльями в производстве подъемной силы, позволит наравне с высокой тяговооруженностью СУ реализовать возможность выполнения технологии ВВП и КВП. Кроме того, перед самолетом классической схемы продольный триплан-тандем обладает такими преимуществами, как предотвращение сваливания в штопор, меньшие потери на балансировку и, что особенно важно, возможность и простота управления балансировкой развитыми элевонами в двух ЗКК, особенно парирование поперечного момента, а также получения высоких несущих свойств при меньших размерах, а отсутствие механизации несущих поверхностей упрощает конструкцию. А аэродинамическая компоновка двойного фюзеляжа минимизирует негативное аэродинамическое сопротивление колес, возникающее во время полета. Причем так называемое МПК создает подъемную силу, благодаря которой задний горизонтальный стабилизатор МЗК превращается в еще одну несущую поверхность, особенно с двумя несущими фюзеляжами. Поскольку толкающие винты в ЗКК не создают дополнительные вихревые потоки, то несущие фюзеляжи поддерживают ламинарный поток на треть всей их длины, что увеличивает их подъемную силу. В результате, нагрузка на крылья-лопасти снижается, а при их вкладе в создании суммарной подъемной силы всего лишь на уровне около 25%, то за счет этого уменьшаются и их потребные размеры, но и снижается при этом аэродинамическое сопротивление и увеличивается скорость.
Однако, нет никаких сомнений в том, что на пути освоения АМВВ, используя вышеназванные преимущества, предстоит преодолеть еще немало трудностей и проблем. Это в первую очередь относится к решению проблем аэродинамической интерференции НВ и толкающего винта в ЗКК и возможности обеспечения устойчивости и управляемости на режимах ВВП при совместной работе в синхронно-сбалансированной ССНС-Х2 однолопастных НВ, которые весьма перспективны в качестве останавливаемых и не убираемых в полете винтов-крыльев, что исключит наличие узлов переворота лопастей (для организации симметричных поверхностей крыла относительно продольной оси) или весьма конструктивно сложных систем их складывания и уборки НВ. Несомненно, с течением времени широкое использование в СУ РПД позволит добиться снижения расхода топлива более чем на треть в сравнении с гибридным аэромобилем двухвинтовой соосной схемы компании "AVX Aircraft" (США), что немаловажно и, особенно, для спасательных АМВВ (см. табл. 1).
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОЦЕЛЕВОЙ ДВУХФЮЗЕЛЯЖНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2650258C1 |
| СКОРОСТНОЙ ГИБРИДНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2652863C1 |
| БЕСПИЛОТНЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2664024C2 |
| МНОГОЦЕЛЕВОЙ ПАЛУБНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2652861C1 |
| МНОГОВИНТОВОЙ СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2658736C1 |
| СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ-АМФИБИЯ | 2017 |
|
RU2655249C1 |
| БЕСПИЛОТНЫЙ ТЯЖЕЛЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2667433C2 |
| БЕСПИЛОТНЫЙ ПАЛУБНЫЙ ПРЕОБРАЗУЕМЫЙ ВИНТОКРЫЛ | 2017 |
|
RU2661277C1 |
| БЕСПИЛОТНЫЙ ВЫСОКОСКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2653953C1 |
| АВИАЦИОННЫЙ РАКЕТНЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ УДАРНЫМ ВЕРТОЛЕТОМ-САМОЛЕТОМ | 2017 |
|
RU2674742C1 |
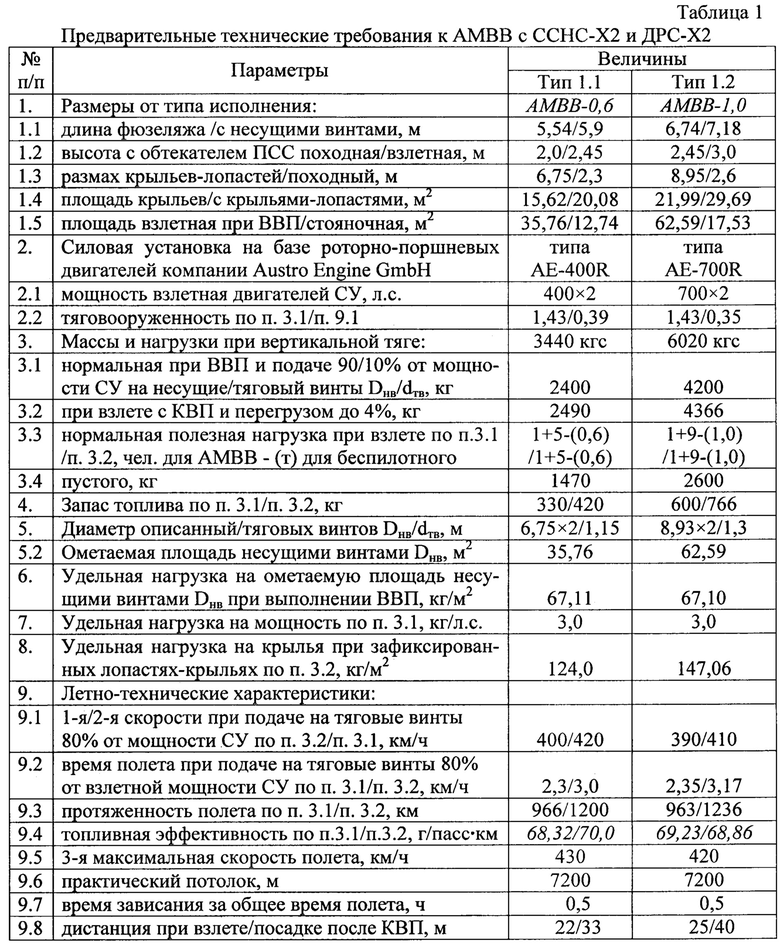
Изобретение относится к области транспортной техники, в частности к конструкциям аэромобилей. Аэромобиль вертикального взлета (АМВВ) выполнен по схеме двойного фюзеляжа и с тремя тандемными крыльями, каждое из которых малого удлинения. Несущие фюзеляжи имеют аэродинамический профиль крыла с относительной толщиной, обеспечивающей возможность размещения кабины, пассажирского салона и двигательного отсека. По оси симметрии на пилоне в изломе поперечного V межфюзеляжного среднего крыла расположена несущая система, включающая два с противоположным вращением однолопастных несущих винта, обеспечивающих только ВВП и КВП. Толкающие винты расположены в кольцевых каналах, интегрированных с задними кромками несущих фюзеляжей и межфюзеляжного заднего крыла, обеспечивают создания управляющих моментов при выполнении ВВП и зависания и маршевую тягу при скоростном горизонтальном полете при зафиксированных лопастях-крыльях несущих винтов. Обеспечивается повышение скорости и дальности полета, упрощение поперечно-продольной управляемости на режимах ВВП. 5 з.п. ф-лы, 1 ил., 1 табл.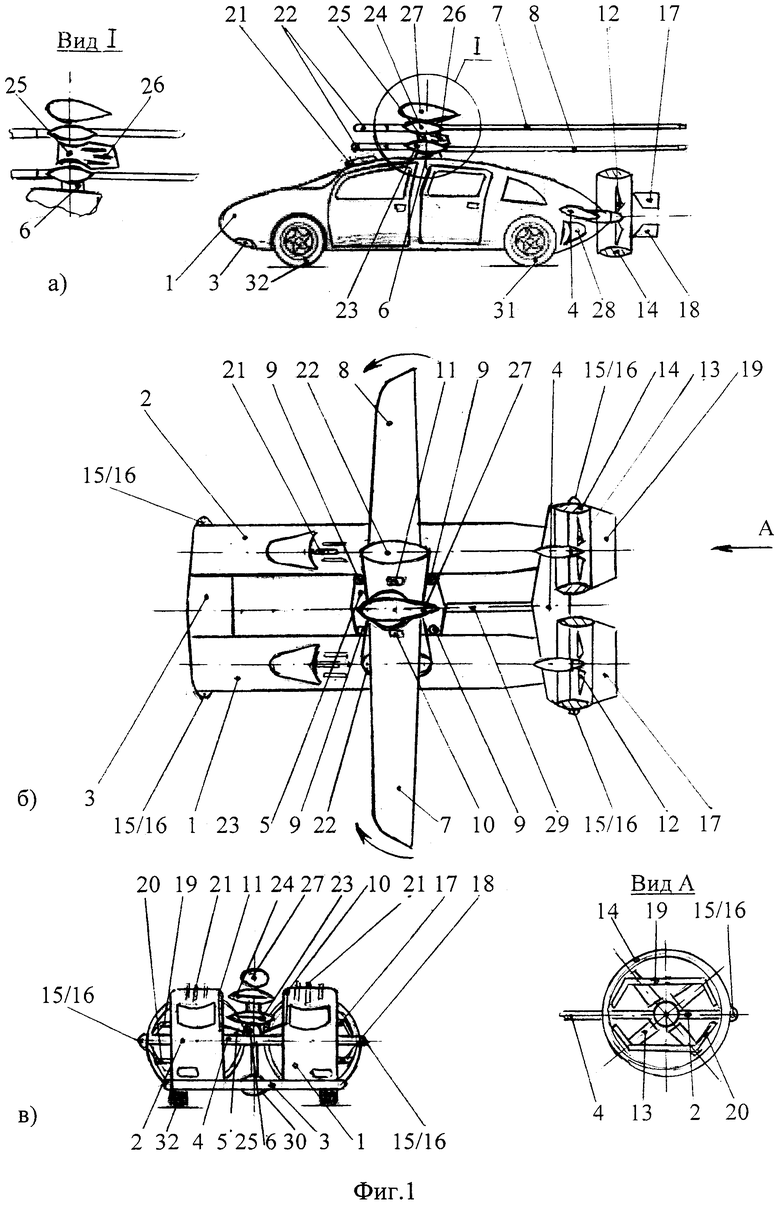
1. Аэромобиль вертикального взлета, имеющий двухвинтовую соосную схему с несущими винтами и силовую установку (СУ) с двигателями, передающими крутящий момент через систему трансмиссии на несущие и тяговые винты в кольцевых каналах, и четырехопорное неубирающееся колесное шасси с электрическими мотор-колесами для передвижения по земле со сложенными винтами, отличающийся тем, что он выполнен по схеме двойного фюзеляжа и с тремя тандемными крыльями, каждое из которых малого удлинения низко- и среднерасположенные межфюзеляжные переднее и заднее крылья соответственно (МПК и МЗК) и высокорасположенное между двумя последними - межфюзеляжное среднее крыло (МСК), и концепции крупномерных несущих фюзеляжей прямоугольного сечения с закругленными углами, имеющих аэродинамический профиль крыла с относительной их толщиной, обеспечивающей возможность в каждом фюзеляже размещения кабины, пассажирского салона и двигательного отсека соответственно в передней, центральной и задней его частях, но и расположения в упомянутых двухвинтовых соосно-симметричной несущей системе (ССНС) и движительно-рулевой системе (ДРС) соответственно по оси симметрии и по обе стороны от нее в центральной и кормовой частях на пилоне в изломе поперечного V МСК и на концах несущих фюзеляжей, включающих над центром масс два с противоположным вращением однолопастных несущих винта (НВ), обеспечивающих только вертикальный и короткий взлет/посадку (ВВП и КВП), и толкающие винты в задних кольцевых каналах (ЗКК), интегрированных с задними кромками несущих фюзеляжей и МЗК как для продольно-поперечного управления и создания управляющих моментов при выполнении ВВП и зависания, так и маршевой тяги при скоростном горизонтальном полете и зафиксированных лопастях-крыльях однолопастных НВ, размещенных на профилированном пилоне, и снабжен возможностью преобразования полетной его конфигурации после выполнения технологии КВП или ВВП с винтокрыла или вертолета с ССНС-Х2 и ДРС-Х2 в соответствующий скоростной винтокрыл или самолет с маршевой ДРС-Х2 соответственно с однолопастными НВ, работающими на режимах, близких к их авторотации, или при зафиксированных лопастях-крыльях верхнего и нижнего однолопастных НВ, левые и правые лопасти которых остановлены и зафиксированы перпендикулярно к плоскости симметрии и вынесены от последней наружу так, что их передние кромки размещены перпендикулярно к потоку, увеличивая площадь тандемных крыльев и несущую их способность совместно с несущими фюзеляжами, но и образуя с ними схему свободно несущего продольного триплана-тандема, используемого только для скоростного горизонтального полета, или после вертикальной посадки на землю и при остановке лопастей-крыльев его НВ и соответствующем их фиксировании вдоль оси симметрии - передвижения по земле, так и обратно, при этом нижний и верхний однолопастные НВ, закрепленные на соответствующих выходных валах главного редуктора, верхний полый из которых снабжен полой неподвижной опорой, установленной соосно внутри последнего, которая жестко закреплена своим нижним концом к корпусу главного редуктора, а верхним сцентрирована относительно его верхнего вала при помощи подшипникового узла так, что выступающая из вала верхняя часть опоры закреплена совместно с верхним каплевидным обтекателем, имеющим в верхней автоматически раскрываемой части контейнер с вытяжным и основным парашютами, стропы последнего закреплены на верхней части полой опоры, что обеспечивает, защищая от ударной нагрузки совместно с энергопоглощающими стойками колесного шасси, допустимое уменьшение скорости снижения до 7 м/с, что смягчает приземление при аварийной посадке на парашютной спасательной системе, причем однолопастные НВ выполнены без управления циклического изменения их шага и с жестким креплением их лопастей и профилированных противовесов, но и создания от однолопастных НВ полной компенсации реактивных крутящих моментов при противоположном направлении вращения между винтами в разнесенной паре по высоте НВ, например при виде сверху верхний и нижний однолопастные НВ вращаются соответственно по часовой и против часовой стрелки так, что соответствующие наступающие их лопасти проходили над левым и правым бортами фюзеляжей от кормовой к носовой их частям, и, как следствие, обеспечивают устранение гироскопического эффекта, гармоничное сочетание продольно-поперечного управления при выполнении ВВП и зависания и создание более плавного обтекания воздушным потоком несущих фюзеляжей, при этом МПК, стреловидное МЗК и трапециевидное МСК имеют разновеликие площади, которые составляют соответственно 27%, 29% и 44% от общей площади трех тандемных межфюзеляжных крыльев, причем передняя серповидная в плане кромка ПМК, вынесенная вперед за соответствующие части несущих фюзеляжей, образует передний бампер, при этом полностью синхронно-сбалансированная ССНС-Х2, работающая совместно с тремя тандемными крыльями и толкающими винтами ДРС-Х2 в левом и правом ЗКК, смонтированных по продольным осям соответствующих фюзеляжей, обдувают воздушным потоком верхние и нижние поверхности несущих фюзеляжей и создают возможность повышения несущей их способности и, особенно, когда продольная ось каждого ЗКК при виде сбоку размещена либо выше, либо по продольной линии, проходящей соответственно над вертикальным центром масс, либо по его центру и, следовательно, уменьшает возможность возникновения кабрирующего момента, причем толкающие флюгерно-реверсивные винты в ЗКК имеют как жесткое крепление лопастей, так и возможность изменения общего их шага и установки их лопастей во флюгерное положение после их остановки и фиксации для осуществления аварийного режима посадки с авторотирующими НВ в случае отказа двигателей СУ, но и возможность создания ими маршевой тяги при горизонтальном скоростном полете, а также прямой и обратной горизонтальной тяги ДРС-Х2 при выполнении ВВП и зависания для поступательного соответствующего перемещения вдоль продольной его оси и выполнения интенсивной обдувки после предварительного синфазного и дифференциального отклонения двух верхних с двумя нижними и двух левых с двумя правыми развитыми элевонами ЗКК, изменяющими соответственно продольную и поперечную балансировку при выполнении ВВП и зависания или горизонтального полета и установленными на выходе каждого ЗКК снизу и сверху на величину половины радиуса толкающего винта от центра ЗКК, внешние концы которых отогнуты к его центру и имеют развитые отгибы со стреловидностью по передней кромке, обеспечивающей отклонение элевонов вверх-вниз на углы атаки ±15°, при этом система трансмиссии обеспечивает передачу мощности от двух, например, роторно-поршневых двигателей (РПД), имеющих передний вывод вала для отбора взлетной их мощности, смонтированы в задней части соответствующих фюзеляжей и связаны посредством муфт сцепления с Г-образными в плане угловыми редукторами, образующими левую и правую синхронизирующие системы, передающие крутящий момент от РПД к главному многоуровневому кормовому крестообразному в плане редуктору, выходные продольные валы которого связаны посредством трех муфт сцепления как нижней из них с входным валом ведущего моста задних колес шасси, размещенного с осью последних в профилированных обтекателях, так и верхней или средней из них соответственно с передним наклонно-продольным входным валом соосного редуктора однолопастных НВ, смонтированного в изломах поперечного V в центроплане МСК, или с задним входным валом Т-образного в плане промежуточного редуктора толкающих винтов ДРС-Х2, причем при выполнении ВВП и зависания главным редуктором обеспечивается плавное перераспределение располагаемой взлетной мощности СУ к ССНС-Х2 и ДРС-Х2 соответственно 90% и 10% и реализуются вертолетные режимы полета при удельной нагрузке на мощность СУ, равной ρN=3,0 кг/л.с., а на самолетных режимах полета при зафиксированных соответствующим образом лопастях-крыльях верхнего и нижнего однолопастных НВ главным редуктором перераспределяется 80% от взлетной мощности СУ системой трансмиссии только на толкающие винты в ЗКК, но и обратно, причем на земле в походной его конфигурации однолопастные винты в ССНС-Х2 после их остановки и фиксации с углом установки каждой лопасти ϕ=0° так, что верхняя с нижней лопастями-крыльями и их противовесы направлены в противоположные стороны соответственно назад и вперед от центра масс, размещены при виде сверху по оси симметрии так, что сами лопасти-крылья зафиксированы между ЗКК, а их противовесы - перед задней кромкой МПК, при этом после выполнения посадки на землю для обеспечения необходимых режимов поездки системой трансмиссии передается соответствующая от 0% до 50% мощность СУ на задние приводные колеса упомянутого четырехопорного колесного шасси, имеющего переднюю пару управляемых поворотных колес для наземного его передвижения после соответствующего складывания концевых частей стабилизатора при зафиксированных лопастях-крыльях соответствующим образом в конфигурацию автомобиля, который содержит в левом и правом фюзеляжах соответствующие кабины, имеющие как раздельные органы управления для передвижения по земле и выполнения взлета, полета и посадки, так и тандемное расположение энергопоглощающих кресел, предназначенных соответственно для водителя с двумя пассажирами и для пилота с двумя пассажирами, но и имеет с обеих сторон и по внешним бортам фюзеляжей по две соответствующие двери, пассажирские из которых сдвижные.
2. Аэромобиль вертикального взлета по п. 1, отличающийся тем, что упомянутые соосные однолопастные НВ с профилированными противовесами имеют радиус (rпп), определяемый из соотношения: rпп=0,3⋅Rнв, м (где Rнв - радиус НВ), при этом каждый профилированный противовес, выполненный с обратным в плане сужением, имеет корневую и концевую хорды соответственно равновеликую и в 1,2 раза больше корневой хорды несущего винта, имеющего в свою очередь концевую хорду лопасти-крыла в 1,2 раза меньше его корневой хорды, снабжен законцовкой, имеющей внешнюю дугообразную и зеркально расположенную внутреннюю линии, образующие эллипсовидную в плане форму с большей ее осью, сопрягаемой с соответствующими кромками профилированного противовеса, образуя удобообтекаемую его форму, причем МСК, выполненное с возможностью вертикального совместного его перемещения с пилоном и однолопастными НВ вверх/вниз соответственно для полетной/походной конфигурации, снабжено в корневых частях двумя парами вертикальных направляющих, левым и правым синхронизированными винтовыми домкратами с электромеханическим приводом, при этом упомянутый наклонно-продольный соединительный вал, связывающий выходной вал главного редуктора с входным валом редуктора соосных однолопастных НВ, выполнен в виде карданного телескопического вала с двумя карданными шарнирами.
3. Аэромобиль вертикального взлета по п. 2, отличающийся тем, что упомянутые соосные нижний и верхний однолопастные НВ, выполненные с системой обтекателей, включающей как обтекатели втулок, каждый из которых имеет верхний и нижний выпуклые профили, имеющие эллиптическую конфигурацию, так и обтекатель колонки соосных валов, размещенный между соответствующими обтекателями втулок и уменьшающий общее сопротивление и разнос между лопастью нижнего и верхнего однолопастных винтов не менее 14% от их радиуса, при этом обтекатель колонки валов, имеющий при виде сверху каплевидную форму и систему предотвращения неуправляемого вращения обтекателя вала вокруг оси вращения, смонтирован так, что имеет верхний и нижний щелевые зазоры, выполненные зеркально эллиптическим поверхностям соответствующих обтекателей втулок соосных НВ, причем обтекатель колонки соосных НВ, облегчающий обтекание, уменьшающий разделение потока и сопротивление, снабжен при виде сбоку горизонтальными аэродинамическими равновеликими гребнями, параллельно смонтированными по три с каждой задней боковой его вертикальной поверхности так, что каждый центральный, установленный по ее середине и ближе к задней его кромке, имеющей обратную стреловидность, а верхний и нижний аэродинамические гребни в свою очередь установлены дальше от нее и при этом равноудалены от центрального.
4. Аэромобиль вертикального взлета по п. 1, отличающийся тем, что он выполнен с упомянутыми левым и правым местами экипажа соответственно для пилота и для водителя, при этом на упомянутом каждом несущем фюзеляже спереди на верхней части его носка перед стеклом кабины имеется по меньшей мере три равновеликих аэродинамических гребня, параллельно смонтированных, улучшая его обтекание, так чтобы центральный размещался по продольной оси ближе к лобовому стеклу, а левый и правый аэродинамические гребни в свою очередь установлены дальше от нее и при этом равноудалены от центрального.
5. Аэромобиль вертикального взлета по п. 1, отличающийся тем, что упомянутые РПД имеют в системе трансмиссии возможность как передачи мощности через коробку передач на привод упомянутых управляемых поворотных передних колес четырехопорного колесного шасси, используемого для наземного его передвижения после соответствующей трансформации в конфигурации гибридного автомобиля, так и сочетаться с семидиапазонной трансмиссией: пять передач предназначены для езды и вращения генератора (четыре передние и одна задняя), шестая передает крутящий момент на привод НВ и толкающих винтов при выполнении ВВП и зависания, а седьмая ступень одновременно вращает толкающие винты и приводные передние колеса для выполнения укороченного взлета, а после взлета и отключения трансмиссии от привода колес, затем вращает и генератор после его подключения к ней при скоростном горизонтальном полете в самолетной конфигурации.
6. Аэромобиль вертикального взлета по любому из пп. 1-5, отличающийся тем, что при выполнении ВВП для повышения безопасности на торцах законцовок, упомянутых МПК и внешних бортах по оси каждого ЗКК имеются сигнальные огни и датчики сближения, предупреждающие звуковой сиреной о недопустимом приближении с посторонними объектами, при этом автономные системы управления, включающие автопилот для осуществления самостоятельного взлета после выбора и подтверждения маршрута и систему экстренной автоматической посадки, которая включится в том случае, если пилот не будет реагировать на запросы бортового компьютера, но и следящие системы, которые идентифицируют появившиеся на пути перелета препятствия и дадут команду на их автоматический облет, а затем обеспечат мягкую посадку в заданной точке.
| US 20130126666 A1, 23.05.2013 | |||
| АВТОМОБИЛЬ | 2006 |
|
RU2330765C2 |
| КОНВЕРТОПЛАН (ВАРИАНТЫ) | 2010 |
|
RU2446078C2 |
| US 20140239116 A1, 28.08.2014. | |||

