Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу управления крутящим моментом и к устройству управления крутящим моментом.
Уровень техники
[0002] Традиционно, электрическое транспортное средство, содержащее электромотор для движения, включает в себя датчик акселератора, датчик скорости транспортного средства и контроллер для управления крутящим моментом электромотора для движения. Контроллер вычисляет среднюю величину ускорения из рабочей величины нажатия педали акселератора, определенной посредством датчика акселератора, целевую движущую силу ведущего колеса из скорости транспортного средства, рабочую величину нажатия педали акселератора и карту для приведения в движение и целевой крутящий момент электромотора для движения из целевой движущей силы и трансмиссии CVT. Затем контроллер управляет электромотором для движения таким образом, чтобы формировать целевой движущий крутящий момент из электромотора для движения. (Патентный документ 1).
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1. JP 1993-168108 A
Сущность изобретения
Задачи, решаемые изобретением
[0004] Тем не менее, в вышеуказанном электрическом транспортном средстве, когда электромотор управляется таким образом, чтобы задавать выходной крутящий момент электромотора запрашиваемым крутящим моментом в состоянии, в котором запрашиваемый крутящий момент от водителя является небольшим, имеется проблема в том, что эффективность приведения в движение транспортного средства становится низкой.
[0005] Задачи, которые должны решаться посредством настоящего изобретения, заключаются в том, чтобы предоставлять способ управления крутящим моментом с более высокой эффективностью приведения в действие электромотора и устройство управления крутящим моментом.
Средство решения задач
[0006] В настоящем изобретении, вышеуказанная задача решается посредством вычисления запрашиваемого крутящего момента электромотора, задания запрашиваемого крутящего момента равным нулю и управления крутящим моментом, сформированным в электромоторе, на основе запрашиваемого крутящего момента, который задается равным нулю, когда запрашиваемый крутящий момент меньше предварительно определенного порогового значения крутящего момента.
Преимущества изобретения
[0007] Согласно настоящему изобретению, может повышаться эффективность приведения в действие электромотора.
Краткое описание чертежей
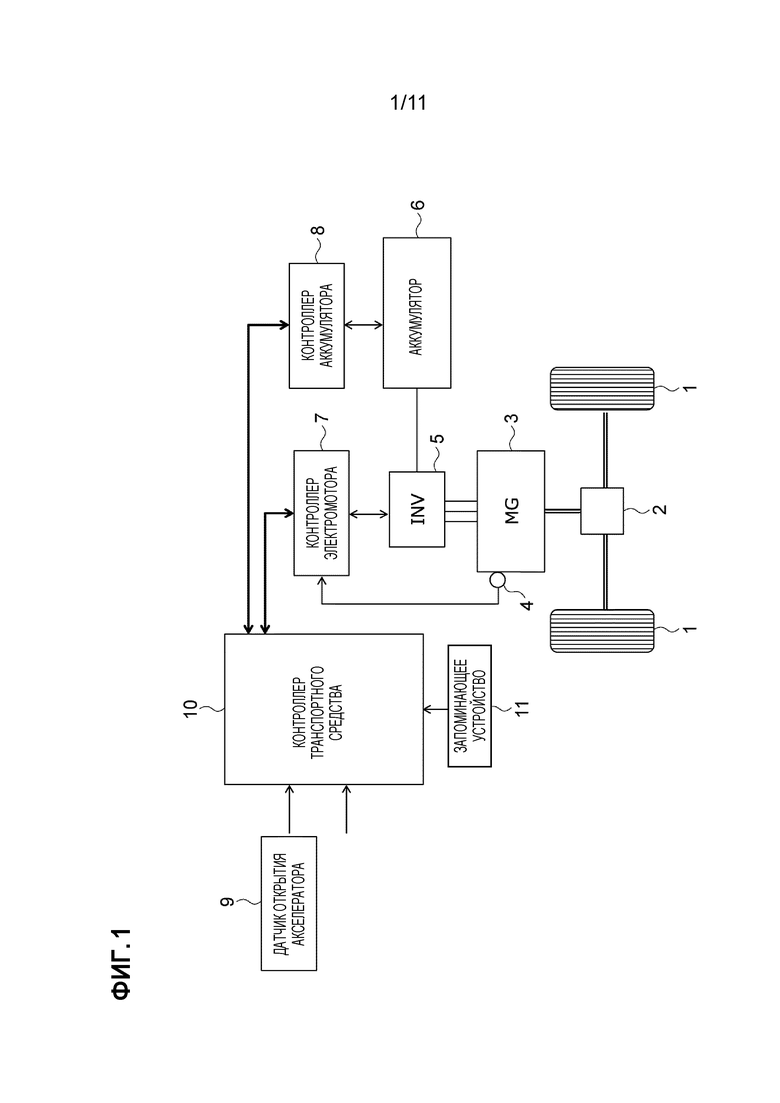
[0008] Фиг. 1 является блок-схемой системы транспортного средства, включающей в себя устройство управления крутящим моментом настоящего варианта осуществления согласно настоящему изобретению.
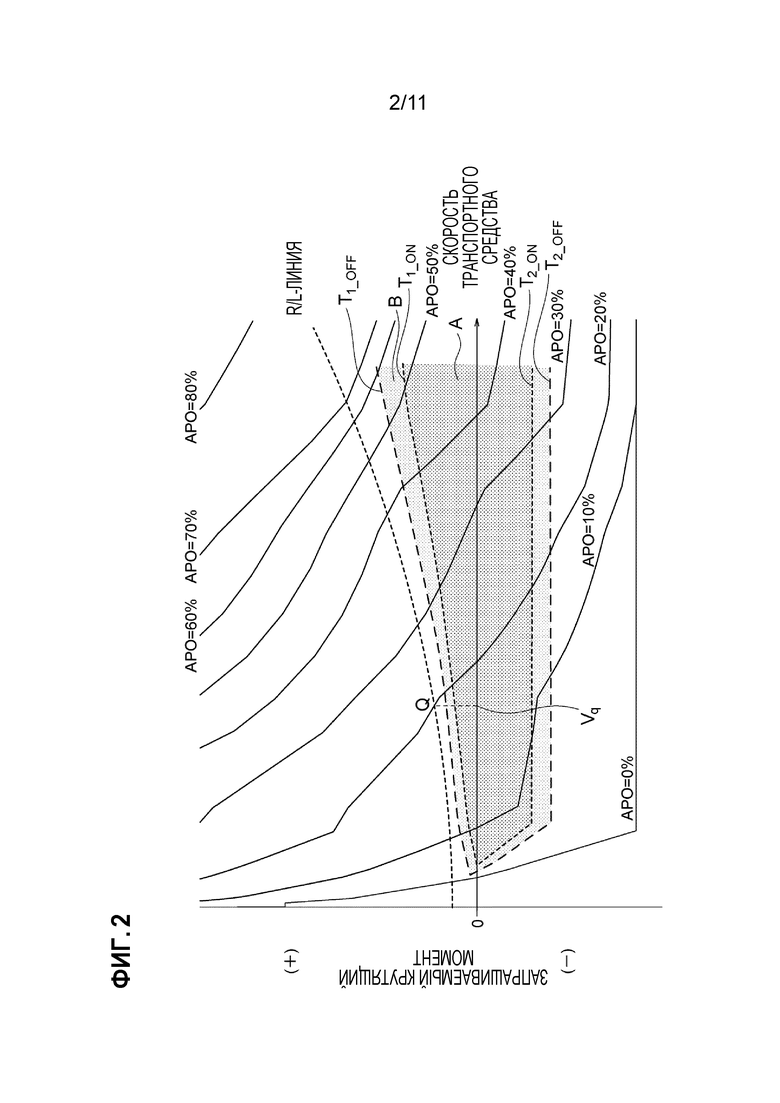
Фиг. 2 является схемой, иллюстрирующей пример карты движущей силы.
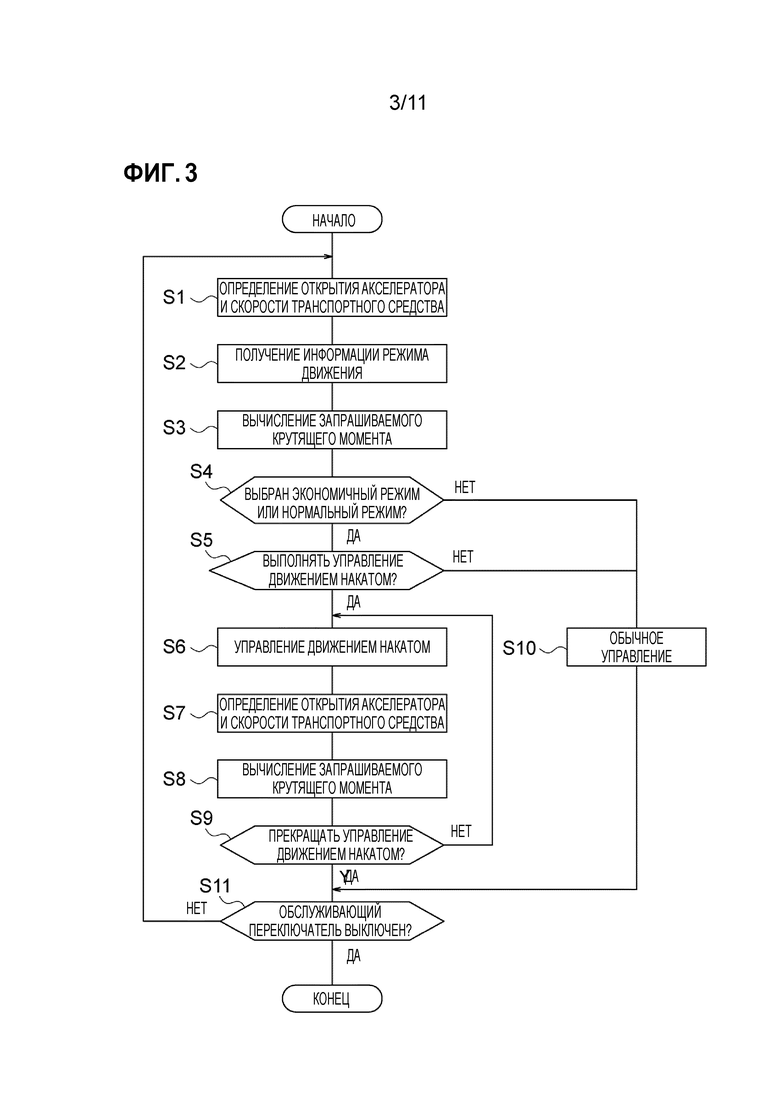
Фиг. 3 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций управления способа управления крутящим моментом согласно настоящему варианту осуществления.
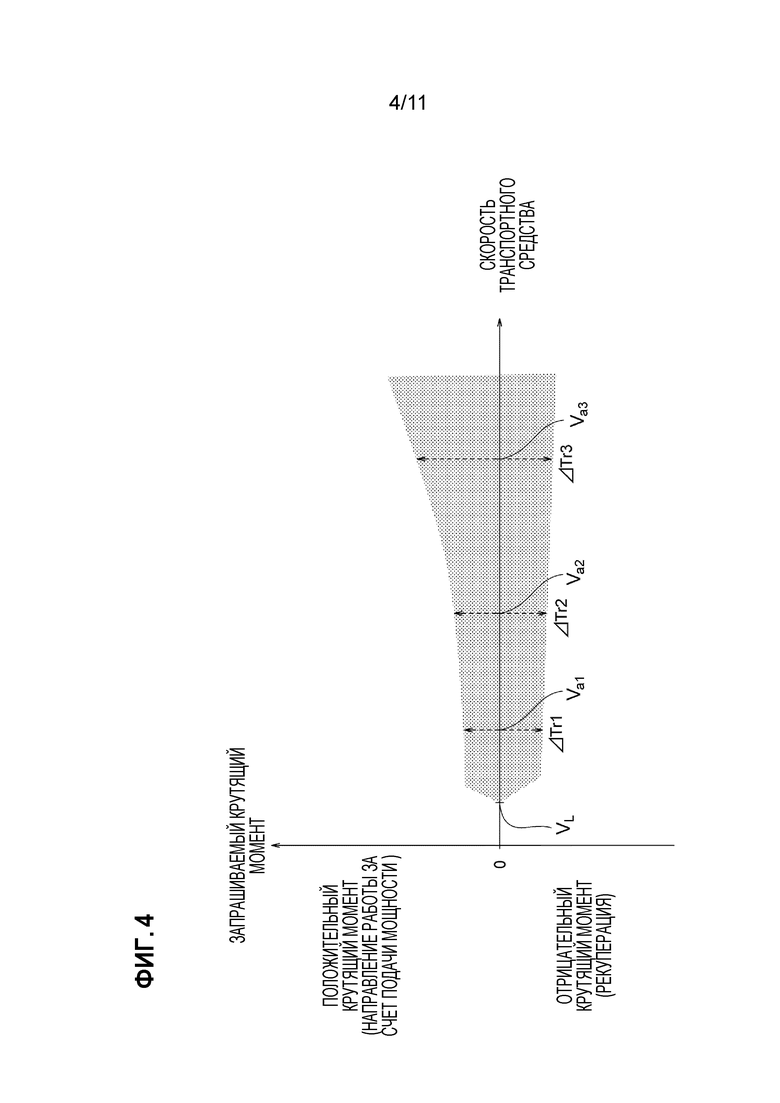
Фиг. 4 является схемой, иллюстрирующей окружающие части области A на карте движущей силы, показанной на фиг. 2.
Фиг. 5 является схемой, иллюстрирующей пошаговые переходы крутящего момента и скорости транспортного средства на карте движущей силы, показанной на фиг. 2.
Фиг. 6 является графиком, иллюстрирующим временную диаграмму для включения и выключения управления движением накатом и характеристик крутящего момента.
Фиг. 7 является графиком, иллюстрирующим временную диаграмму для включения и выключения управления движением накатом и характеристик крутящего момента.
Фиг. 8 является графиком, иллюстрирующим характеристики крутящего момента нормального режима.
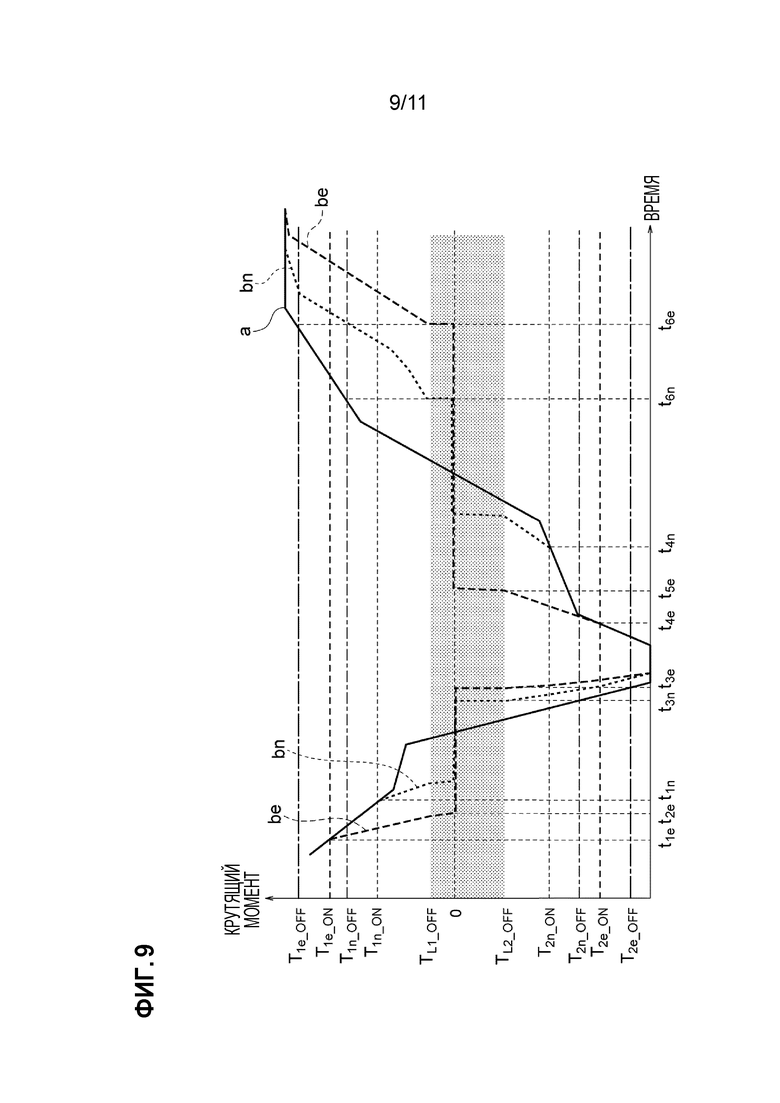
Фиг. 9 является графиком, иллюстрирующим характеристики крутящего момента нормального режима и характеристики крутящего момента экономичного режима.
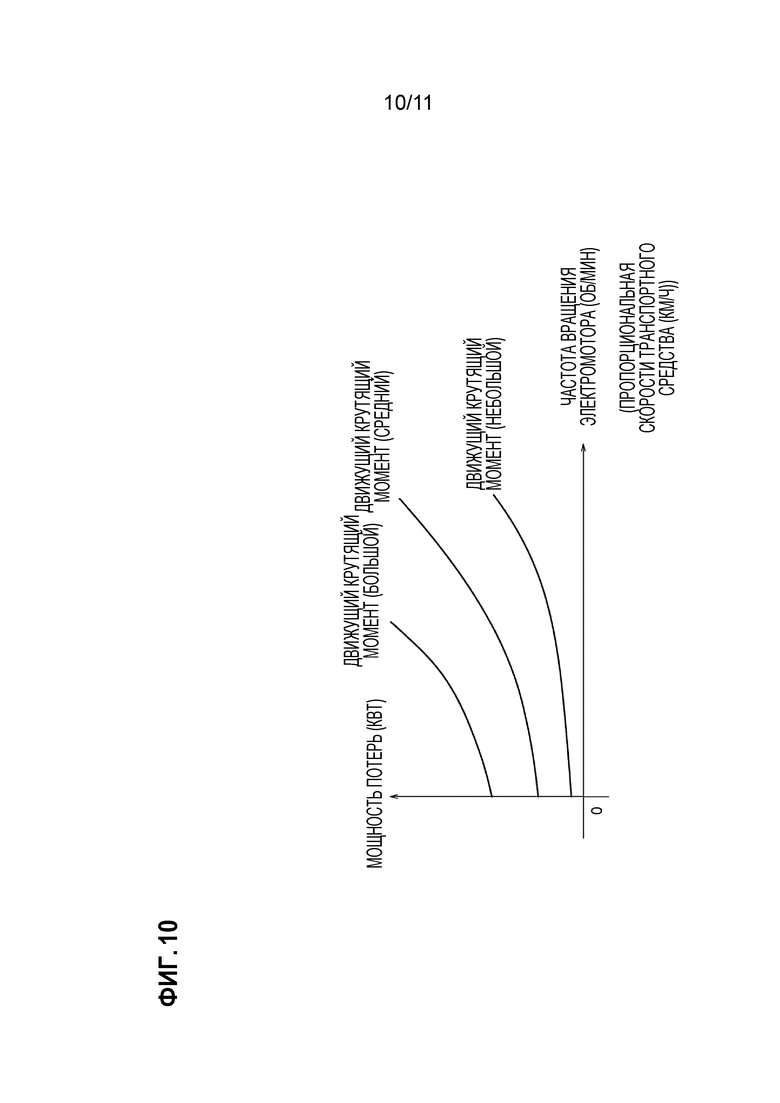
Фиг. 10 является графиком, иллюстрирующим характеристики мощности потерь относительно частоты вращения электромотора.
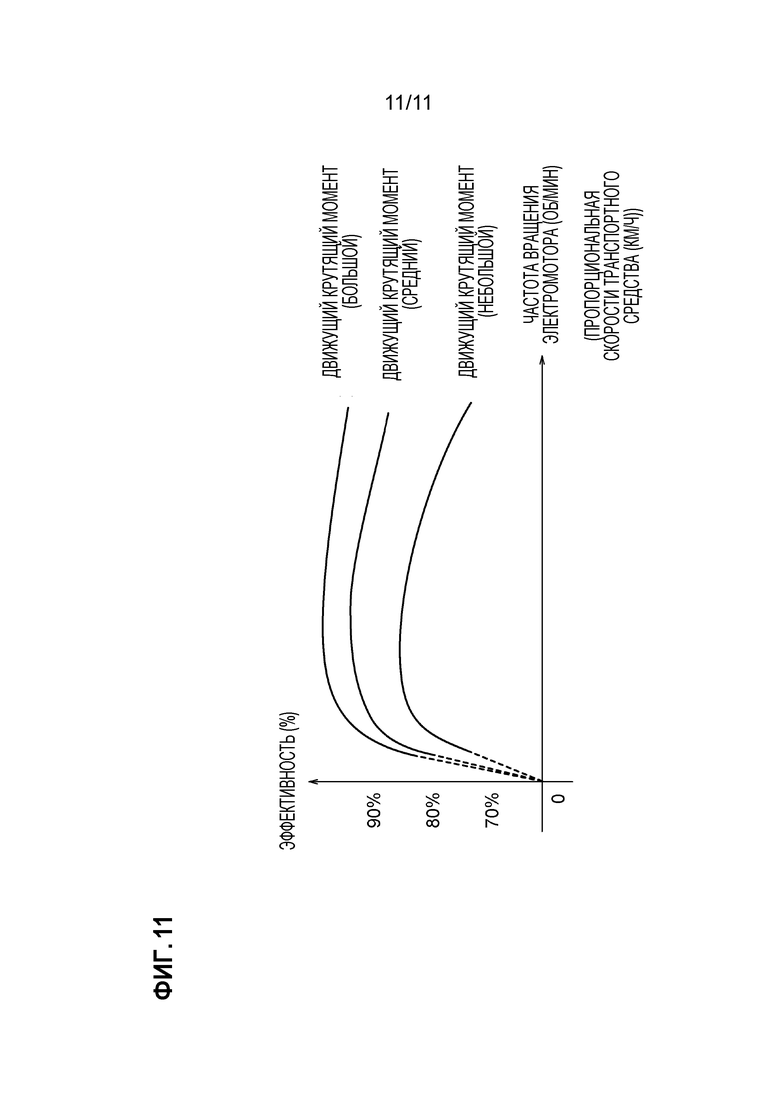
Фиг. 11 является графиком, иллюстрирующим характеристики эффективности относительно частоты вращения электромотора.
Варианты осуществления изобретения
[0009] Далее описываются варианты осуществления настоящего изобретения со ссылкой на чертежи.
[0010] Фиг. 1 является блок-схемой системы транспортного средства, содержащей устройство управления крутящим моментом согласно настоящему варианту осуществления. Устройство управления крутящим моментом согласно настоящему варианту осуществления представляет собой устройство для управления выходным крутящим моментом приводного механизма, включенного в транспортное средство, и устанавливается на транспортном средстве. В нижеприведенном пояснении, случай, в котором устройство управления крутящим моментом устанавливается на электрическом транспортном средстве, используется в качестве примера. Устройство управления крутящим моментом не обязательно устанавливается на электрическом транспортном средстве, но может устанавливаться на другом транспортном средстве, таком как гибридное транспортное средство, либо на приводной системе, отличной от транспортных средств.
[0011] Как показано на фиг. 1, система транспортного средства включает в себя ведущее колесо 1, дифференциальную шестерню 2, генератор 3 мощности (MG: электромотор), датчик 4 частоты вращения, инвертор 5 (INV), аккумулятор 6, контроллер 7 электромотора, контроллер 8 аккумулятора, датчик 9 открытия акселератора, контроллер 10 транспортного средства и запоминающее устройство 11.
[0012] Ведущее колесо 1 вращается посредством мощности, выводимой от генератора 3 мощности. Дифференциальная передача 2 передает мощность от генератора 3 мощности приводить во вращение в пропорции справа и слева. Генератор 3 мощности представляет собой источник приведения в движение системы транспортного средства и приводится в действие посредством мощности аккумулятора. Вращающийся вал генератора 3 мощности соединяется с осью. Во время работы за счет подачи мощности генератора 3 мощности, крутящий момент, сформированный в генераторе 3 мощности, передается на ведущее колесо 1 через ось. Во время рекуперации генератора 3 мощности, генератор 3 мощности вырабатывает мощность с использованием вращающей силы ведущего колеса 1 и заряжает аккумулятор 6 с помощью вырабатываемой электрической мощности.
[0013] Датчик 4 частоты вращения определяет частоту вращения электромотора 3. Датчик 4 частоты вращения выводит определенное значение в контроллер 7 электромотора.
[0014] Инвертор 5 соединяется с генератором 3 мощности посредством трехфазной электропроводки и соединяется с аккумулятором 6 с помощью линии подачи мощности. Инвертор 5 преобразует выходную мощность из аккумулятора 6 в мощность переменного тока и выводит мощность переменного тока в генератор 3 мощности. Кроме того, инвертор 5 преобразует вырабатываемую мощность генератора 3 мощности в мощность постоянного тока и выводит мощность постоянного тока в аккумулятор 6. Инвертор 5 включает в себя схему и т.п., соединяющую переключающий элемент (силовой модуль), такой как IGBT в форме перемычки.
[0015] Аккумулятор 6 включает в себя вторичный аккумулятор, такой как литий-ионный аккумулятор. Аккумулятор 6 функционирует в качестве источника мощности системы транспортного средства.
[0016] Контроллер 7 электромотора представляет собой контроллер для управления генератором 3 мощности. Контроллер 7 электромотора управляет генератором 3 мощности на основе запрашиваемого крутящего момента, выводимого из контроллера 10 транспортного средства, и определенного значения посредством датчика 4 частоты вращения. Контроллер 7 электромотора вычисляет частоту вращения генератора 3 мощности с использованием датчика 4 частоты вращения. Контроллер 7 электромотора вычисляет значение команды управления для согласования выходного крутящего момента генератора 3 мощности со значением команды управления крутящим моментом для текущей частоты вращения генератора 3 мощности. Значение команды управления представляется посредством значения команды управления током и т.п. Чтобы согласовывать выходной крутящий момент генератора 3 мощности со значением команды управления крутящим моментом, контроллер 7 электромотора передает в качестве обратной связи определенное значение датчика тока (не показан на чертежах) и вычисляет значение команды управления посредством PI-управления. Контроллер 7 электромотора формирует сигнал переключения посредством сравнения вычисленного значения команды управления и несущей и выводит сигнал переключения в инвертор 5. Сигнал переключения представляет собой сигнал для включения и выключения переключающего элемента, включенного в инвертор 5. Таким образом, контроллер 7 электромотора управляет крутящим моментом, сформированным в генераторе 3 мощности, на основе запрашиваемого крутящего момента (запрашиваемого крутящего момента для управления), выводимого из контроллера 10 транспортного средства.
[0017] Контроллер 8 аккумулятора представляет собой контроллер для управления состоянием аккумулятора 6. Контроллер 8 аккумулятора управляет аккумулятором 6 посредством вычисления состояния заряда (SOC) с использованием датчика напряжения (не показан на чертежах), соединенного с аккумулятором 6. Контроллер 8 аккумулятора выводит сигнал, указывающий состояние аккумулятора 6, в контроллер 10 транспортного средства.
[0018] Между контроллером 7 электромотора и контроллером 10 транспортного средства и между контроллером 7 электромотора и контроллером 10 транспортного средства соединяются с CAN-шиной. CAN-шина представляет собой сеть связи, соединенную между каждым контроллером, установленным на транспортном средстве.
[0019] Датчик 9 открытия акселератора определяет открытие акселератора. Водитель нажимает акселератор, чтобы ускорять транспортное средство. Величина нажатия педали акселератора соответствует абсолютной величине ускорения, которую запрашивает водитель. Другими словами, открытие акселератора представляет запрашиваемое значение для управления скоростью от водителя. Датчик 9 открытия акселератора выводит обнаруженное открытие акселератора (APO) в контроллер 10 транспортного средства.
[0020] Контроллер 10 транспортного средства представляет собой контроллер для управления всей системой транспортного средства. Контроллер 10 транспортного средства получает информацию акселератора и информацию режима движения с использованием аппаратных средств, таких как датчик. Контроллер 10 транспортного средства получает информацию акселератора посредством определения открытия акселератора с использованием датчика 9 открытия акселератора.
[0021] Режим движения представляет способ управления для системы транспортного средства. Режим движения классифицируется на множество режимов в соответствии с коэффициентом энергопотребления транспортного средства, и величина энергопотребления относительно открытия акселератора варьируется в зависимости от режима движения. В электрическом транспортном средстве, величина энергопотребления соответствует потребляемой мощности аккумулятора 6. В настоящем варианте осуществления, режим движения классифицируется на экономичный режим, нормальный режим и спортивный режим. Кроме того, водитель выбирает режим движения посредством переключения переключателя в салоне транспортного средства. В экономичном режиме, величина энергопотребления относительно открытия акселератора подавляется больше всего. В спортивном режиме, величина энергопотребления относительно открытия акселератора становится максимальной, и функциональность ускорения становится высокой. В нормальном режиме, достигаются рабочие характеристики ускорения и уменьшение величины энергопотребления. Абсолютная величина и варьирование формируемого крутящего момента генератора 3 мощности относительно запроса на ускорение водителем становятся минимальными в экономичном режиме и максимальными в спортивном режиме. Контроллер 10 транспортного средства получает информацию режима движения посредством обнаружения состояния переключателя для выбора режима движения.
[0022] Контроллер 10 транспортного средства получает информацию аккумулятора 6 из контроллера 8 аккумулятора и получает информацию, указывающую состояние движения транспортного средства, из контроллера 7 электромотора. Информация, указывающая состояние движения транспортного средства, например, представляет собой информацию скорости транспортного средства.
[0023] Контроллер 10 транспортного средства определяет запрос на управление скоростью от водителя с использованием датчика 9 открытия акселератора и вычисляет запрашиваемый крутящий момент на основе определенного запроса и состояния транспортного средства. Запрашиваемый крутящий момент указывается посредством абсолютной величины формируемого крутящего момента генератора 3 мощности, чтобы представлять запрос на управление скоростью от водителя. Контроллер 10 транспортного средства вычисляет запрашиваемый крутящий момент с использованием карты движущей силы, сохраненной в запоминающем устройстве 11.
[0024] Фиг. 2 является графиком для пояснения карты движущей силы. Как показано на фиг. 2, карта движущей силы указывает относительную взаимосвязь между скоростью транспортного средства, открытием акселератора (APO) и запрашиваемым крутящим моментом. На фиг. 2, график, показанный в виде сплошной линии, представляет характеристики запрашиваемого крутящего момента относительно скорости транспортного средства, и каждая характеристика варьируется посредством открытия акселератора. Когда транспортное средство движется на определенной скорости транспортного средства, и когда имеется запрос на управление транспортным средством (операцию нажатия педали акселератора) от водителя, выбирается график, который соответствует открытию акселератора, и на выбранном графике, запрашиваемый крутящий момент, который соответствует текущей скорости транспортного средства, становится запрашиваемой движущей силой для генератора 3 мощности. На фиг. 2, положительное значение движущей силы представляет выходной крутящий момент для стороны работы за счет подачи мощности (движущую силу генератора 3 мощности), и отрицательное значение движущей силы представляет входной крутящий момент для стороны рекуперации (тормозную силу генератора 3 мощности).
[0025] На фиг. 2, область A и область B представляют область, в которой выполняется управление движением накатом. График R иллюстрирует характеристику линии сопротивления движению (R/L-линии). Линия сопротивления движению указывает крутящий момент, требуемый для того, чтобы поддерживать определенную скорость транспортного средства, и определяется экспериментально. T1_ON, T2_ON, T1_OFF и T2_OFF являются пороговыми значениями, представленными в крутящем моменте, указывающем времена переключения режима управления между обычным управлением и управлением движением накатом, и задаются заранее. T1_ON и T2_ON представляют пороговые значения для переключения между обычным управлением и управлением движением накатом. T1_OFF и T2_OFF представляют пороговые значения для переключения с управления движением накатом на обычное управление. T1_ON и T1_OFF представляют пороговые значения для стороны работы за счет подачи мощности, и T2_ON и T2_OFF представляют пороговые значения для стороны рекуперации. Что касается обычного управления, управления движением накатом и пороговых значений (T1_ON, T2_ON, T1_OFF и T2_OFF) крутящего момента, они описываются ниже.
[0026] Контроллер 10 транспортного средства получает частоту вращения электромотора из контроллера 7 электромотора и вычисляет скорость транспортного средства (скорость транспортного средства для управления). Скорость транспортного средства вычисляется из частоты вращения электромотора, передаточного отношения и радиуса колеса для ведущего колеса 1. Другими словами, скорость транспортного средства для управления соответствует частоте вращения электромотора. Дополнительно, контроллер 10 транспортного средства вычисляет крутящий момент, который соответствует открытию акселератора и скорости транспортного средства, в качестве запрашиваемого крутящего момента от водителя при обращении к карте движущей силы, описанной выше. Контроллер 10 транспортного средства выводит вычисленный запрашиваемый крутящий момент в контроллер 7 электромотора. Как описано ниже, при обычном управлении, контроллер 10 транспортного средства выводит крутящий момент, указываемый на карте движущей силы для контроллера 7 электромотора, в качестве запрашиваемого крутящего момента для управления без коррекции. Тогда как, при управлении движением накатом, контроллер 10 транспортного средства сначала корректирует крутящий момент, указываемый на карте движущей силы, до нуля, а затем выводит крутящий момент после коррекции (нулевой крутящий момент) в контроллер 7 электромотора в качестве запрашиваемого крутящего момента для управления.
[0027] Далее, с использованием фиг. 3, поясняется способ управления крутящим моментом посредством устройства управления крутящим моментом согласно настоящему варианту осуществления. Фиг. 3 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций управления контроллера 7 электромотора и контроллера 10 транспортного средства. Когда главный переключатель включается водителем, последовательность операций управления, показанная на фиг. 3, начинается. Главный переключатель включает и выключает систему транспортного средства.
[0028] На этапе S1, контроллер 10 транспортного средства определяет текущее открытие акселератора с использованием датчика 9 открытия акселератора. Контроллер 10 транспортного средства получает частоту вращения электромотора посредством получения определенного значения датчика 4 частоты вращения через контроллер 7 электромотора и затем вычисляет скорость транспортного средства на основе полученной частоты вращения электромотора. Таким образом, контроллер 10 транспортного средства определяет скорость транспортного средства.
[0029] На этапе S2, контроллер 10 транспортного средства получает информацию режима движения.
[0030] На этапе S3, контроллер 10 транспортного средства обращается к карте движущей силы и вычисляет запрашиваемый крутящий момент, который соответствует открытию акселератора и скорости транспортного средства.
[0031] На этапе S4, контроллер 10 транспортного средства определяет то, находится либо нет режим движения в экономичном режиме или в нормальном режиме. Когда режим движения находится в экономичном режиме, либо когда режим движения находится в нормальном режиме, последовательность операций управления переходит к этапу S5. Тогда как, когда режим движения находится в спортивном режиме, последовательность операций управления переходит к этапу S10. Другими словами, хотя управление движением накатом, описанное ниже, выполняется в экономичном режиме и нормальном режиме, управление движением накатом не выполняется в спортивном режиме.
[0032] На этапе S5, контроллер 10 транспортного средства сравнивает вычисленный запрашиваемый крутящий момент и пороговые значения (T1_ON и T2_ON) крутящего момента и определяет то, следует или нет выполнять управление движением накатом, на основе результата сравнения. Контроллер 10 транспортного средства определяет то, находится или нет запрашиваемый крутящий момент в пределах диапазона крутящих моментов, показанного посредством области A. Область A представляет собой диапазон, окруженный посредством пороговых значений (T1_ON и T2_ON) крутящего момента на карте движущей силы. Когда запрашиваемый крутящий момент находится в пределах диапазона области A, контроллер 10 транспортного средства определяет выполнять управление движением накатом. Последовательность операций управления переходит к этапу S6. С другой стороны, когда запрашиваемый крутящий момент находится за пределами диапазона области A, контроллер 10 транспортного средства определяет не выполнять управление движением накатом. Последовательность операций управления переходит к этапу S11.
[0033] Определение того, находится или нет запрашиваемый крутящий момент в пределах диапазона области A, выполняется посредством сравнения запрашиваемого крутящего момента и пороговых значений (T1_ON и T2_ON) крутящего момента, как показано ниже. Когда вычисленный запрашиваемый крутящий момент представляет собой крутящий момент стороны работы за счет подачи мощности, и когда запрашиваемый крутящий момент меньше порогового значения (T1_ON) крутящего момента, контроллер 10 транспортного средства определяет выполнять управление движением накатом. Когда вычисленный запрашиваемый крутящий момент представляет собой крутящий момент стороны работы за счет подачи мощности, и когда запрашиваемый крутящий момент равен или выше порогового значения (T1_ON) крутящего момента, контроллер 10 транспортного средства определяет не выполнять управление движением накатом. Когда вычисленный запрашиваемый крутящий момент представляет собой крутящий момент стороны рекуперации, и когда запрашиваемый крутящий момент меньше порогового значения (T2_ON) крутящего момента, контроллер 10 транспортного средства определяет выполнять управление движением накатом. Когда вычисленный запрашиваемый крутящий момент представляет собой крутящий момент стороны рекуперации, и когда запрашиваемый крутящий момент равен или выше порогового значения (T2_ON) крутящего момента, контроллер 10 транспортного средства определяет не выполнять управление движением накатом. Дополнительно, как показано на фиг. 2, когда запрашиваемый крутящий момент стороны рекуперации указывается с отрицательным значением, пороговое значение (T2_ON) крутящего момента задается равным отрицательному значению крутящего момента, и когда "запрашиваемый крутящий момент > пороговое значение (T2_ON) крутящего момента" удовлетворяется, контроллер 10 транспортного средства определяет выполнять управление движением накатом.
[0034] На этапе S6, контроллер 10 транспортного средства выполняет управление движением накатом. При управлении движением накатом, когда запрашиваемый крутящий момент от водителя находится внутри области A, запрашиваемый крутящий момент для управления задается равным нулю, и генератор 3 мощности управляется таким образом, что заданный запрашиваемый крутящий момент становится формируемым крутящим моментом генератора 3 мощности. Другими словами, когда запрашиваемый крутящий момент меньше пороговых значений (T1_ON и T2_ON) крутящего момента, контроллер 10 транспортного средства управляет генератором 3 мощности посредством понижения запрашиваемого крутящего момента для управления генератором 3 мощности (соответствует значению команды управления крутящим моментом) ниже фактического запроса от водителя.
[0035] Когда запрашиваемый крутящий момент от водителя является небольшим, и генератор 3 мощности формирует точный крутящий момент по запросу водителя, потребляемая мощность посредством электрической системы, такой как инвертор 5, становится относительно больше мощности приведения в действие генератора 3 мощности. Таким образом, когда генератор 3 мощности приводится в действие по запросу водителем, эффективность приведения в движение становится низкой. Кроме того, когда продолжительность времени движения в состоянии, в котором запрашиваемый крутящий момент является небольшой, накапливается, продолжительность времени приведения в движение в низкоэффективном состоянии становится большой, и как результат, это может приводить к тому, что расстояние движения в режиме оптимального регулирования скорости транспортного средства становится небольшим.
[0036] В устройстве управления крутящим моментом в настоящем варианте осуществления, когда запрашиваемый крутящий момент от водителя находится внутри области A, запрашиваемый крутящий момент для управления задается равным нулю, и генератор 3 мощности управляется таким образом, чтобы инструктировать заданному запрашиваемому крутящему моменту становиться формируемым крутящим моментом генератора 3 мощности. Соответственно, формируемый крутящий момент генератора 3 мощности становится ниже крутящего момента по запросу водителем, и в силу этого предотвращается приведение в действие генератора 3 мощности в низкоэффективном состоянии, и может повышаться эффективность приведения в движение.
[0037] На этапе S7, контроллер 10 транспортного средства определяет открытие акселератора и скорость транспортного средства. На этапе S8, контроллер 10 транспортного средства вычисляет запрашиваемый крутящий момент. Последовательность операций управления этапом S7 и этапом S8 представляет собой последовательность операций управления, аналогичную этапу S1 и этапу S3. Другими словами, контроллер 10 транспортного средства определяет открытие акселератора и скорость транспортного средства даже во время управления движением накатом и вычисляет запрашиваемый крутящий момент от водителя.
[0038] На этапе S9, контроллер 10 транспортного средства сравнивает вычисленный запрашиваемый крутящий момент и пороговые значения (T1_OFF и T2_OFF) крутящего момента и определяет то, следует или нет прекращать управление движением накатом, на основе результата сравнения. Контроллер 10 транспортного средства определяет то, находится или нет запрашиваемый крутящий момент в пределах диапазона крутящих моментов, показанного как область B. Область B представляет собой диапазон, окруженный посредством пороговых значений (T1_OFF и T2_OFF) крутящего момента на карте движущей силы. Когда запрашиваемый крутящий момент находится в пределах диапазона области B, контроллер 10 транспортного средства определяет продолжать управление движением накатом. Последовательность операций управления возвращается к этапу S6. С другой стороны, когда запрашиваемый крутящий момент находится за пределами диапазона области B, контроллер 10 транспортного средства определяет прекращать управление движением накатом. Последовательность операций управления переходит к этапу S11.
[0039] Оценка того, находится или нет запрашиваемый крутящий момент в пределах диапазона области B, выполняется посредством сравнения запрашиваемого крутящего момента и пороговых значений (T1_OFF и T2_OFF) крутящего момента, как описано ниже. Когда вычисленный запрашиваемый крутящий момент представляет собой крутящий момент стороны работы за счет подачи мощности, и когда запрашиваемый крутящий момент меньше порогового значения (T1_OFF) крутящего момента, контроллер 10 транспортного средства определяет не прекращать управление движением накатом. Когда вычисленный запрашиваемый крутящий момент представляет собой крутящий момент стороны работы за счет подачи мощности, и когда запрашиваемый крутящий момент равен или выше порогового значения (T1_OFF) крутящего момента, контроллер 10 транспортного средства определяет прекращать управление движением накатом. Когда вычисленный запрашиваемый крутящий момент представляет собой крутящий момент стороны рекуперации, и когда запрашиваемый крутящий момент меньше порогового значения (T2_OFF) крутящего момента, контроллер 10 транспортного средства определяет не прекращать управление движением накатом. Когда вычисленный запрашиваемый крутящий момент представляет собой крутящий момент стороны рекуперации, и когда запрашиваемый крутящий момент равен или выше порогового значения (T2_OFF) крутящего момента, контроллер 10 транспортного средства определяет прекращать управление движением накатом. Дополнительно, как показано на фиг. 2, когда запрашиваемый крутящий момент стороны рекуперации указывается с отрицательным значением, пороговое значение (T2_OFF) крутящего момента задается равным отрицательному значению крутящего момента, и когда "запрашиваемый крутящий момент > пороговое значение (T2_OFF) крутящего момента" удовлетворяется, контроллер 10 транспортного средства определяет прекращать управление движением накатом.
[0040] На этапе S5, при определении не выполнять управление движением накатом, контроллер 10 транспортного средства выполняет обычное управление на этапе S11. При обычном управлении, контроллер 10 транспортного средства управляет генератором 3 мощности таким образом, что запрашиваемый крутящий момент, вычисленный на карте движущей силы, становится формируемым крутящим моментом генератора 3 мощности.
[0041] На этапе S14, контроллер 10 транспортного средства определяет то, находится или нет главный переключатель в отключенном состоянии. Когда главный переключатель находится во включенном состоянии, последовательность операций управления возвращается к этапу S1. Когда главный переключатель находится в отключенном состоянии, последовательность операций управления завершается.
[0042] В дальнейшем описывается взаимосвязь между запрашиваемым крутящим моментом и управлением движением накатом с использованием фиг. 4. Фиг. 4 является графиком, иллюстрирующим окружающие части области A на карте движущей силы, показанной на фиг. 2.
[0043] Как показано на фиг. 4, по мере того, как возрастает скорость транспортного средства для транспортного средства, пороговое значение (T1_ON) крутящего момента стороны работы за счет подачи мощности становится большим. Тогда как пороговое значение (T2_ON) крутящего момента стороны рекуперации является почти стабильным, несмотря на скорость транспортного средства. Другими словами, когда разности крутящих моментов на любой скорости транспортного средства внутри области A (Va1, Va2, Va3: при этом Va1<Va2<Va3) рассматриваются как ΔTr1, ΔTr2, и ΔTr3, ΔTr3 становится наибольшим, и ΔTr1 становится наименьшим из числа разностей (ΔTr1, ΔTr2 и ΔTr3) крутящих моментов. Разности (ΔTr1, ΔTr2 и ΔTr3) крутящих моментов указывают диапазон, в котором управление движением накатом выполняется относительно определенной скорости транспортного средства. Таким образом, по мере того, как возрастает скорость транспортного средства, диапазон выполнения для управления движением накатом становится более широким.
[0044] По сравнению со случаем, в котором частота вращения электромотора является низкой, потребляемая мощность посредством электрической системы, такой как инвертор 5, становится больше относительно потребляемой мощности, требуемой для того, чтобы приводить в действие генератор 3 мощности, когда частота вращения электромотора является высокой. Обычно, когда частота вращения электромотора является высокой, чтобы подавлять противоэлектродвижущую силу, сформированную в генераторе 3 мощности, инвертор 5 управляется в способе управления ослаблением поля. Тем не менее, когда инвертор управляется в способе управления ослаблением поля, потребляемая мощность инвертора становится больше, чем при обычном управлении инвертором. В настоящем варианте осуществления, пороговое значение крутящего момента задается таким образом, чтобы задавать диапазон выполнения управления движением накатом шире по мере того, как возрастает скорость транспортного средства. Когда запрашиваемый крутящий момент от водителя является небольшим в состоянии, в котором частота вращения электромотора является высокой, поскольку управление движением накатом выполняется, может предотвращаться управление приведением в действие таким образом, что генератор 3 мощности выводит крутящий момент при сильном вращении. Как результат, может подавляться неэффективное приведение в действие генератора 3 мощности.
[0045] Дополнительно, пороговое значение (T2_ON) крутящего момента стороны рекуперации задается равным значению, которое является почти постоянным, несмотря на скорость транспортного средства. В отличие от настоящего варианта осуществления, когда пороговое значение (T2_ON) крутящего момента стороны рекуперации изменяется согласно скорости транспортного средства, рекуперативный крутящий момент также изменяется относительно скорости транспортного средства, и в силу этого замедление транспортного средства изменяется в зависимости от скорости транспортного средства. Другими словами, замедление, когда открытие акселератора становится нулевым в то время, когда транспортное средство движется на высокой скорости, и замедление, когда открытие акселератора становится нулевым в то время, когда транспортное средство движется на низкой скорости, становятся отличающимися. Кроме того, вследствие этой разности замедления, водитель не имеет понятия касательно того, каким должен быть размер замедления для текущего состояния транспортного средства, и испытывает дискомфорт при приведении в движение. В настоящем варианте осуществления, поскольку пороговое значение (T2_ON) крутящего момента стороны рекуперации задается равным постоянному значению, несмотря на скорость транспортного средства, может подавляться некомфортное ощущение водителя.
[0046] Кроме того, как показано на фиг. 4, область A задается равной диапазону, в котором скорость транспортного средства становится, по меньшей мере, нижним предельным значением VL или больше. Другими словами, когда скорость транспортного средства составляет нижнее предельное значение VL или больше, управление движением накатом выполняется согласно абсолютной величине запрашиваемого крутящего момента. Тогда как, когда скорость транспортного средства ниже нижнего предельного значения VL, управление движением накатом не выполняется независимо от абсолютной величины запрашиваемого крутящего момента. Таким образом, в области приведения в движение, в которой скорость транспортного средства становится ниже нижнего предельного значения VL, например, при парковке автомобиля на месте для парковки, ситуации запроса небольшого крутящего момента увеличиваются. Соответственно, в настоящем варианте осуществления, контроллер 10 транспортного средства не выполняет управление движением накатом, когда частота вращения электромотора ниже предварительно определенного порогового значения частоты вращения. Таким образом, в ситуации при движении, в которой запрашивается небольшой крутящий момент, точный крутящий момент по запросу водителем может выводиться. Предварительно определенное пороговое значение частоты вращения является пороговым значением, которое соответствует нижнему предельному значению (VL) скорости транспортного средства.
[0047] Дополнительно, как показано на фиг. 2, пороговое значение (T1_OFF) крутящего момента задается равным значению, превышающему пороговое значение (T1_ON) крутящего момента. Кроме того, пороговое значение (T2_OFF) крутящего момента задается равным значению, большему (значению, большему в отрицательном направлении) порогового значения (T2_ON) крутящего момента. Таким образом, может предотвращаться явление, в котором режим управления часто переключается между обычным управлением и управлением движением накатом (неравномерная работа).
[0048] Кроме того, как показано на фиг. 2, пороговое значение (T1_ON) крутящего момента задается равным значению ниже крутящего момента, указываемого посредством характеристики линии сопротивления движению (R/L-линии). Крутящий момент, указываемый посредством характеристики линии сопротивления движению (R/L-линии), представляет собой крутящий момент, требуемый для того, чтобы поддерживать скорость транспортного средства постоянной. Например, на карте, показанной на фиг. 2, предположим, что водитель нажимает акселератор и ускоряет транспортное средство с 20%-м открытием акселератора из состояния, в котором транспортное средство остановлено. Когда скорость транспортного средства увеличивается при поддержании состояния открытия акселератора равным 20%, запрашиваемый крутящий момент уменьшается как и график 20%-го открытия акселератора на карте движущей силы. После этого, когда запрашиваемый крутящий момент достигает точки Q пересечения, движущая сила и сопротивление движению переходят в сбалансированное состояние, и скорость транспортного средства становится постоянной скоростью (Vq). Точка Q пересечения представляет собой точку, в которой пересекается график 20%-го открытия акселератора и линия сопротивления движению (R/L-линия). Пороговое значение (T1_ON) крутящего момента, которое соответствует скорости Vq, задается равным значению, которое ниже крутящего момента, указываемого посредством точки Q пересечения. Кроме того, для скоростей, отличных от скорости Vq пороговое значение (T1_ON) крутящего момента задается равным значению, которое ниже крутящего момента, указываемого посредством характеристики линии сопротивления движению (R/L-линии).
[0049] Чтобы повышать скорость транспортного средства, контроллер 10 транспортного средства должен выполнять обычное управление, и запрашиваемый крутящий момент для управления становится равным запрашиваемому крутящему моменту от водителя (крутящему моменту запроса на ускорение). Тогда как, посредством уменьшения запрашиваемого крутящего момента, контроллер 10 транспортного средства должен выполнять управление движением накатом, когда уменьшение скорости транспортного средства требуется, и в силу этого запрашиваемый крутящий момент для управления задается равным нулю. Таким образом, когда уменьшение скорости транспортного средства требуется посредством уменьшения запрашиваемого крутящего момента в ответ на запрос на ускорение от водителя, может предотвращаться приведение в действие генератора 3 мощности с низкой эффективностью, и может повышаться эффективность приведения в движение.
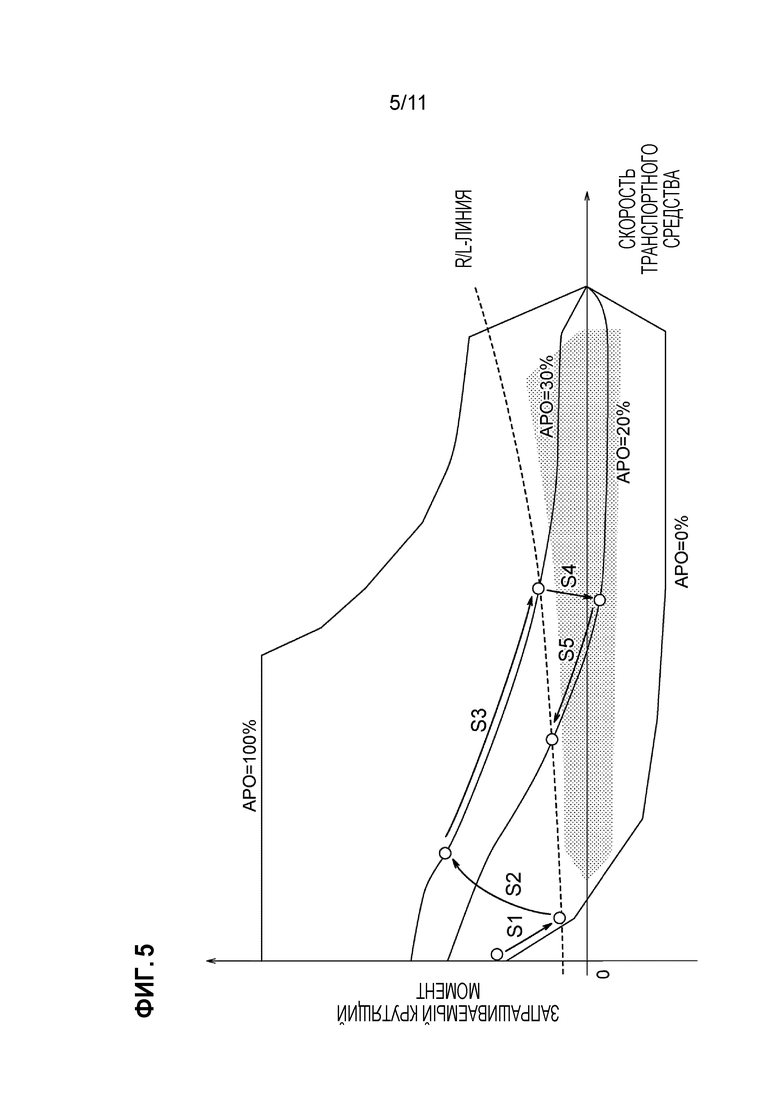
[0050] Далее, с использованием фиг. 5, при предоставлении фактической работы транспортного средства в качестве примера, поясняется переключение между обычным управлением и управлением движением накатом. Фиг. 5 является графиком, показывающим окружающие части области A на карте движущей силы, проиллюстрированной на фиг. 2. Для удобства пояснения, значения, используемые для порогового значения (T1_ON) крутящего момента и порогового значения (T1_OFF) крутящего момента, являются идентичными. Кроме того, S1-S5, показанные на фиг. 5, соответствуют этапам S1-S5 в нижеприведенном пояснении, соответственно.
[0051] На этапе S1, из состояния, в котором транспортное средство остановлено, когда педаль тормоза переходит в отключенное состояние, начинается медленное движение.
[0052] На этапе S2, водитель нажимает акселератор, и ускорение начинается с 30%-м открытием акселератора.
[0053] На этапе S3, посредством нажатия педали акселератора и формирования допустимой движущей силы, ускорение продолжается. Когда движущая сила и сопротивление движению становятся сбалансированными, скорость транспортного средства становится постоянной скоростью.
[0054] На этапе S4, из состояния, в котором движущая сила и сопротивление движению являются сбалансированными, в качестве запроса уменьшения скорости от водителя, водитель немного отпускает акселератор, и открытие акселератора изменяется с 30% до 20%. В это время отпускания акселератора немного (время отпускания акселератора), запрашиваемый крутящий момент от водителя становится меньше порогового значения (T1_ON) крутящего момента, и режим управления генератора 3 мощности переключается с обычного управления на управление движением накатом. После этого, когда управление движением накатом начинается, запрашиваемый крутящий момент для управления задается равным нулю.
[0055] На этапе S5, когда открытие акселератора поддерживается равным 20%, запрашиваемый крутящий момент, вычисленный на карте движущей силы, становится равным или превышающим пороговое значение (T1_OFF) крутящего момента, и в силу этого режим управления генератора 3 мощности переключается с управления движением накатом на обычное управление. Кроме того, запрашиваемый крутящий момент изменяется как и график 20%-го открытия акселератора, и когда движущая сила и сопротивление движению становятся сбалансированными, скорость транспортного средства становится постоянной скоростью.
[0056] Как упомянуто выше, когда режим управления переключается с обычного управления на управление движением накатом, значение запрашиваемого крутящего момента для управления изменяется со значения крутящего момента, вычисленного на карте движущей силы, до нуля. В это время, когда запрашиваемый крутящий момент для управления изменяется прерывисто, варьирование движущей силы (тормозной силы в случае рекуперации) становится большим и приводит к некомфортному ощущению у водителя. По этой причине, в настоящем варианте осуществления, чтобы предотвращать такое некомфортное ощущение, задается ограничитель степени изменения крутящего момента.
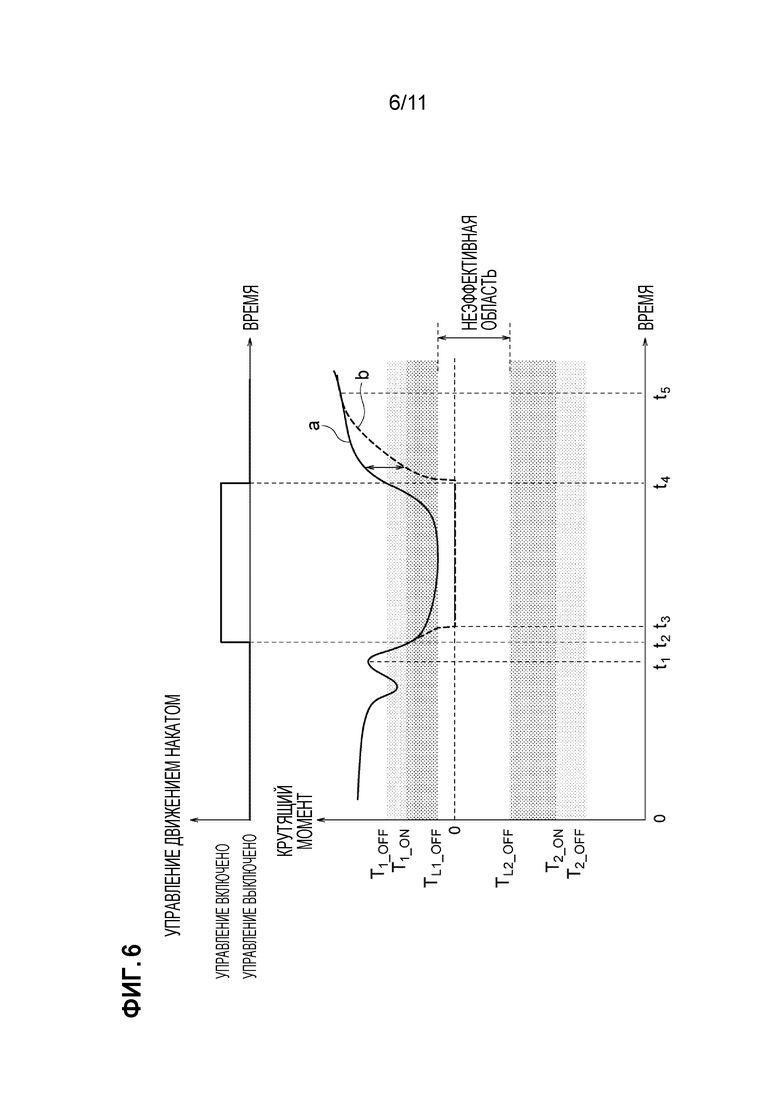
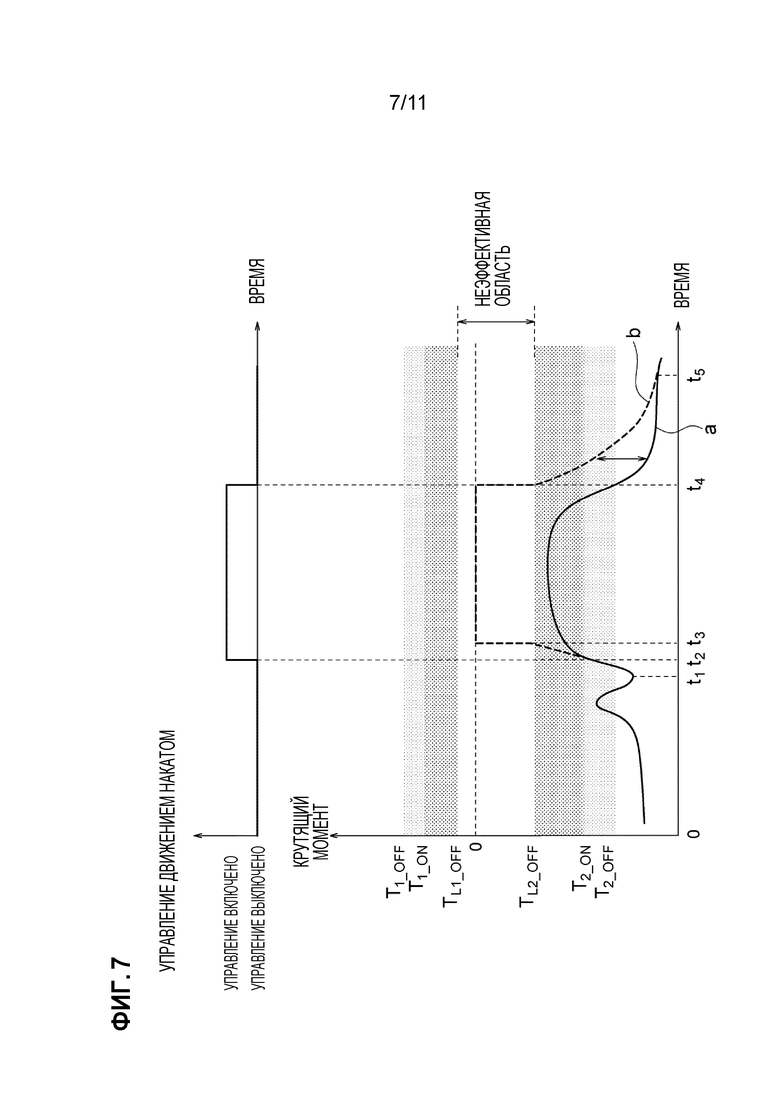
[0057] Далее описывается ограничитель степени изменения крутящего момента с использованием фиг. 6 и фиг. 7. Фиг. 6 и фиг. 7 являются графиками, показывающими временную диаграмму включения и выключения и характеристики крутящего момента управления движением накатом. Фиг. 6 показывает характеристики стороны работы за счет подачи мощности, и фиг. 7 показывает характеристики на стороне рекуперации. На фиг. 6 и фиг. 7, график a иллюстрирует запрашиваемый крутящий момент, вычисленный с использованием карты движущей силы, и график b иллюстрирует запрашиваемый крутящий момент для управления. Кроме того, варьирование крутящего момента, показанное с помощью графика a, соответствует операции нажатия педали акселератора.
[0058] Между временем 0 и временем t1, поскольку запрашиваемый крутящий момент изменяется в диапазоне, большем порогового значения (T1_ON) крутящего момента, посредством операции нажатия педали акселератора, режим управления генератора 3 мощности становится обычным управлением.
[0059] В то время, когда транспортное средство движется, когда водитель осуществляет отпускание акселератора во время t1, понижается запрашиваемый крутящий момент. Движущая сила генератора 3 мощности понижается таким образом, что она совпадает с запрашиваемым крутящим моментом от водителя.
[0060] Во время t2, запрашиваемый крутящий момент от водителя становится меньше порогового значения (T1_ON) крутящего момента, и режим управления генератора 3 мощности переключается с обычного управления на управление движением накатом. В это время, когда генератор 3 мощности управляется таким образом, чтобы задавать движущую силу нулевой, быстрое изменение крутящего момента формируется и может вызывать некомфортное ощущение (подпрыгивание в общей характеристике управляемости) у водителя. По этой причине, посредством задания ограничителя степени изменения крутящего момента активным в течение периода между временем t2 и временем t3, величина изменения крутящего момента поддерживается на низком уровне.
[0061] Между временем t2 и временем t3, контроллер 10 транспортного средства вычисляет величину изменения открытия акселератора и задает величину изменения крутящего момента согласно вычисленной величине изменения открытия акселератора. Величина изменения крутящего момента представляет собой величину изменения до тех пор, пока запрашиваемый крутящий момент для управления во время t2 не изменится на нуль. Контроллер 10 транспортного средства вычисляет величину изменения крутящего момента таким образом, чтобы инструктировать величине изменения крутящего момента становиться больше по мере того, как величина изменения открытия акселератора (соответствует рабочей величине нажатия педали акселератора) увеличивается. Контроллер 10 транспортного средства корректирует запрашиваемый крутящий момент для управления таким образом, что запрашиваемый крутящий момент для управления изменяется на вычисленную величину изменения крутящего момента, и выводит скорректированный запрашиваемый крутящий момент для управления в контроллер 7 электромотора. Таким образом, продолжительность времени изменения крутящего момента становится меньше по мере того, как величина изменения крутящего момента увеличивается, и продолжительность времени изменения крутящего момента становится больше по мере того, как величина изменения крутящего момента уменьшается. Время изменения крутящего момента представляет собой продолжительность времени до тех пор, пока значение движущей силы не изменится со значения запрашиваемого крутящего момента на карте движущей силы до нуля, и является временем между временем t2 и временем t3, показанными на фиг. 6 и фиг. 7.
[0062] Во время t3, когда крутящий момент для управления становится меньше порогового значения (TL1_OFF) крутящего момента, контроллер 10 транспортного средства прекращает ограничитель степени изменения крутящего момента. Пороговое значение (TL1_OFF) крутящего момента указывает верхнее предельное значение неэффективной области ограничителя степени изменения крутящего момента. Неэффективная область ограничителя степени изменения крутящего момента указывает диапазон, в котором крутящий момент для управления задается равным нулю, без наложения ограничений на варьирование крутящего момента. Неэффективная область представляет собой диапазон между верхним предельным значением (TL1_OFF) и нижним предельным значением (TL2_OFF), включающий в себя нулевой крутящий момент. Когда движущая сила становится близкой к нулю, даже когда крутящий момент для управления изменяется на нуль, влияние на приведение в действие является небольшим, поскольку величина изменения ускорения является небольшой. По этой причине, когда крутящий момент для управления меньше порогового значения (TL1_OFF) крутящего момента, контроллер 10 транспортного средства снимает ограничение на варьирование крутящего момента и задает крутящий момент для управления равным нулю. Таким образом, продолжительность времени движения накатом может увеличиваться. Время движения накатом представляет собой продолжительность времени, в которой движущая сила (или тормозная сила) становится нулевой, и представляет собой продолжительность времени между временем t3 и временем t4, показанными на фиг. 6 и фиг. 7.
[0063] Когда запрашиваемый крутящий момент от водителя становится большим, и запрашиваемый крутящий момент становится больше порогового значения (T1_OFF) крутящего момента во время t4, режим управления генератора 3 мощности переключается с управления движением накатом на обычное управление. Когда крутящий момент для управления становится больше порогового значения (TL1_OFF) крутящего момента, контроллер 10 транспортного средства активирует ограничитель степени изменения крутящего момента.
[0064] Между временем t4 и временем t5, контроллер 10 транспортного средства вычисляет величину изменения открытия акселератора и задает величину изменения крутящего момента согласно вычисленной величине изменения открытия акселератора. Контроллер 10 транспортного средства корректирует запрашиваемый крутящий момент для управления таким образом, что запрашиваемый крутящий момент для управления изменяется на величину изменения крутящего момента, и выводит скорректированный запрашиваемый крутящий момент для управления в контроллер 7 электромотора. Затем во время t5, запрашиваемый крутящий момент от водителя и запрашиваемый крутящий момент для управления становятся равными.
[0065] Величина изменения открытия акселератора до и после времени t4 меньше величины изменения открытия акселератора до и после времени t2. По этой причине, величина изменения крутящего момента, вычисленная в течение периода между временем t4 и временем t5, меньше величины изменения крутящего момента, вычисленной в течение периода между временем t2 и временем t3. Когда рабочая величина нажатия педали акселератора является небольшой, водитель испытывает некомфортное ощущение в силу небольшого изменения крутящего момента. В настоящем варианте осуществления, чтобы предотвращать такое некомфортное ощущение, продолжительность времени изменения крутящего момента задается большей посредством задания величины изменения крутящего момента небольшой.
[0066] В отличие от примера на фиг. 6, когда величина изменения открытия акселератора до и времени t4 превышает величину изменения открытия акселератора до и после времени t2, величина изменения крутящего момента, вычисленная между временем t4 и временем t5, превышает величину изменения крутящего момента, вычисленную между временем t2 и временем t3. Когда рабочая величина нажатия педали акселератора является большой, поскольку некомфортное ощущение практически не формируется в силу изменения крутящего момента, величина изменения крутящего момента увеличивается, чтобы задавать время изменения крутящего момента небольшим. Таким образом, продолжительность времени отклика от запроса на крутящий момент до вывода крутящего момента сокращается, и управление незамедлительно в ответ на операцию нажатия педали акселератора может выполняться.
[0067] Далее, с использованием фиг. 7, поясняется ограничитель степени изменения крутящего момента для рекуперации.
[0068] По мере того, как запрашиваемый крутящий момент изменяется в области, большей порогового значения (T2_ON) крутящего момента в период между временем 0 и временем t1, режим управления генератора 3 мощности представляет собой обычное управление. Во время t1, запрашиваемый крутящий момент стороны рекуперации понижается.
[0069] Во время t2, запрашиваемый крутящий момент от водителя становится меньше порогового значения (T2_ON) крутящего момента, и режим управления генератора 3 мощности переключается с обычного управления на управление движением накатом. В это время, аналогично стороне работы за счет подачи мощности, описанной выше, контроллер 10 транспортного средства активирует ограничитель степени изменения крутящего момента и вычисляет запрашиваемый крутящий момент для управления.
[0070] Между временем t2 и временем t3, контроллер 10 транспортного средства вычисляет величину изменения открытия акселератора и задает величину изменения для крутящего момента согласно вычисленной величине изменения открытия акселератора. Контроллер 10 транспортного средства корректирует запрашиваемый крутящий момент для управления таким образом, чтобы изменять запрашиваемый крутящий момент для управления на заданную величину изменения крутящего момента, и выводит скорректированный запрашиваемый крутящий момент для управления в контроллер 7 электромотора.
[0071] Когда запрашиваемый крутящий момент стороны рекуперации становится большим, и запрашиваемый крутящий момент во время t4 становится больше порогового значения (T2_OFF) крутящего момента, режим управления генератора 3 мощности переключается с управления движением накатом на обычное управление. Когда крутящий момент для управления становится больше порогового значения (TL2_OFF) крутящего момента, контроллер 10 транспортного средства активирует ограничитель степени изменения крутящего момента.
[0072] Между временем t4 и временем t5, контроллер 10 транспортного средства вычисляет величину изменения открытия акселератора и задает величину изменения крутящего момента согласно вычисленной величине изменения открытия акселератора. Контроллер 10 транспортного средства вычисляет запрашиваемый крутящий момент для управления таким образом, чтобы инструктировать запрашиваемому крутящему моменту для управления изменяться на заданную величину изменения крутящего момента, и выводит вычисленный запрашиваемый крутящий момент для управления в контроллер 7 электромотора. Затем во время t5, запрашиваемый крутящий момент от водителя и запрашиваемый крутящий момент для управления становятся равными.
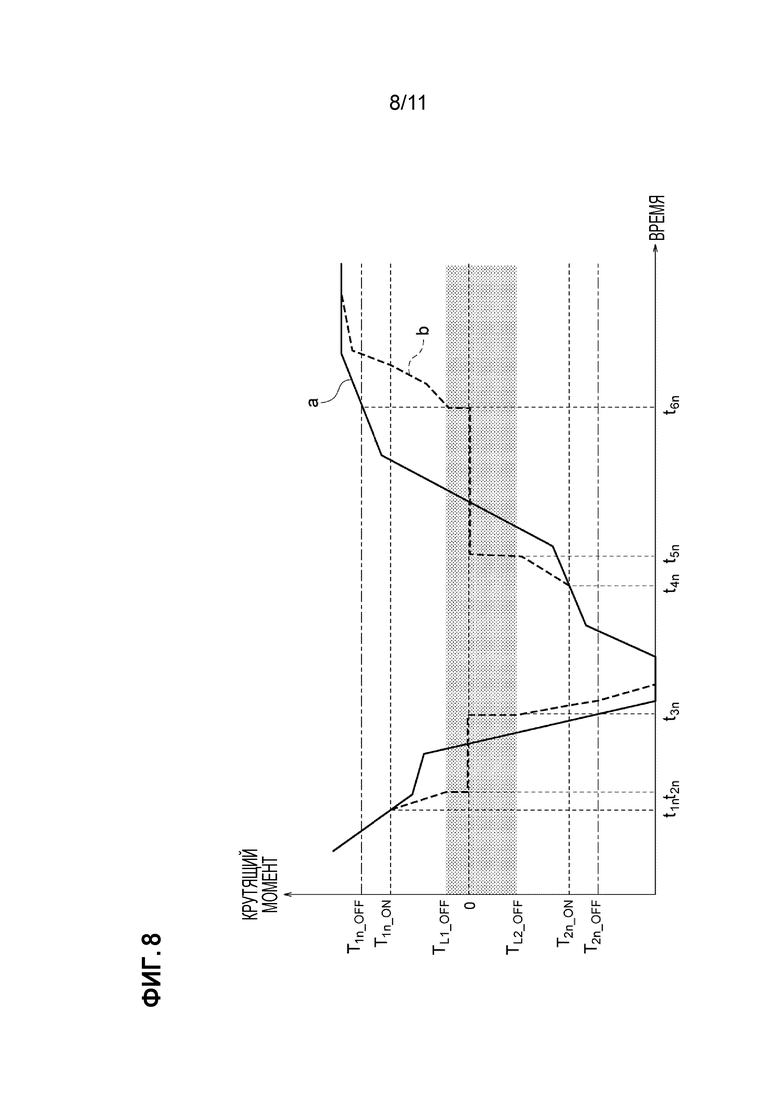
[0073] В настоящем варианте осуществления, чтобы улучшать коэффициент энергопотребления, пороговые значения (T1_ON, T1_OFF, T2_ON и T2_OFF) крутящего момента переключаются согласно режиму движения. Далее, с использованием характеристик крутящего момента нормального режима и характеристик крутящего момента экономичного режима, описывается управление переключением порогового значения крутящего момента согласно режиму движения. Фиг. 8 является графиком, иллюстрирующим характеристики крутящего момента нормального режима. Фиг. 9 является графиком, иллюстрирующим характеристики крутящего момента нормального режима и характеристики крутящего момента экономичного режима, соответственно. На фиг. 8, график a указывает запрашиваемые крутящие моменты, вычисленные с использованием карты движущей силы, и график b указывает запрашиваемые крутящие моменты для управления. На фиг. 9, график a указывает запрашиваемые крутящие моменты, вычисленные с использованием карты движущей силы, график bn показывает запрашиваемые крутящие моменты для управления в нормальном режиме, и график be показывает запрашиваемые крутящие моменты для управления в экономичном режиме.
[0074] В запоминающем устройстве 11 сохраняются, по меньшей мере, два типа пороговых значений (T1_ON) крутящего момента. Кроме того, по меньшей мере, два типа пороговых значений (T1_OFF) крутящего момента, по меньшей мере, два типа пороговых значений (T2_ON) крутящего момента и, по меньшей мере, два типа пороговых значений (T2_OFF) крутящего момента сохраняются в запоминающем устройстве 11, соответственно. Между двумя типами пороговых значений крутящего момента, один тип пороговых значений (T1n_ON, T1n_OFF, T2n_ON и T2n_OFF) крутящего момента представляет собой пороговые значения, которые выбираются в нормальном режиме. Между двумя типами пороговых значений крутящего момента, другой тип пороговых значений (T1e_ON, T1e_OFF, T2e_ON и T2e_OFF) крутящего момента представляет собой пороговые значения, которые выбираются в экономичном режиме. Пороговое значение (T1e_ON) крутящего момента превышает пороговое значение (T1n_ON) крутящего момента, и пороговое значение (T1e_OFF) крутящего момента превышает пороговое значение (T1n_OFF) крутящего момента. Кроме того, пороговое значение (T2e_ON) крутящего момента превышает пороговое значение (T2n_ON) крутящего момента, и пороговое значение (T2e_OFF) крутящего момента превышает пороговое значение (T2n_OFF) крутящего момента.
[0075] Когда режим движения находится в нормальном режиме, контроллер 10 транспортного средства выбирает пороговые значения (T1n_ON, T1n_OFF, T2n_ON, T2n_OFF) крутящего момента для нормального режима. Когда режим движения представляет собой экономичный режим, контроллер 10 выбирает пороговые значения (T1e_ON, T1e_OFF, T2e_ON и T2e_OFF) крутящего момента для экономичного режима.
[0076] Предположим, что запрашиваемый крутящий момент от водителя изменяется с характеристикой, как показано на графике a на фиг. 8, посредством операции нажатия педали акселератора, когда режим движения находится в нормальном режиме.
[0077] Во время t1n, когда запрашиваемый крутящий момент от водителя становится меньше порогового значения (T1n_ON) крутящего момента, контроллер 10 транспортного средства переключает режим управления генератора 3 мощности с обычного режима на режим движения накатом.
[0078] Во время t2n, когда запрашиваемый крутящий момент для управления становится меньше порогового значения (TL1_OFF) крутящего момента, контроллер 10 транспортного средства прекращает ограничение степени изменения крутящего момента.
[0079] Во время t3n, когда запрашиваемый крутящий момент от водителя становится больше порогового значения (T2n_OFF) крутящего момента, контроллер 10 транспортного средства активирует ограничение степени изменения крутящего момента и переключает режим управления генератора 3 мощности с управления движением накатом на обычное управление.
[0080] Во время t4n, когда запрашиваемый крутящий момент от водителя становится меньше порогового значения (T2n_ON) крутящего момента, контроллер 10 транспортного средства переключает режим управления генератора 3 мощности с обычного управления на управление движением накатом.
[0081] Во время t5n, когда запрашиваемый крутящий момент для управления становится меньше порогового значения (TL2_OFF) крутящего момента, контроллер 10 транспортного средства прекращает ограничение степени изменения крутящего момента.
[0082] Во время t6n, когда запрашиваемый крутящий момент от водителя становится больше порогового значения (T1n_OFF) крутящего момента, контроллер транспортного средства активирует ограничение степени изменения крутящего момента и переключает режим управления генератора 3 мощности с управления движением накатом на обычное управление.
[0083] Время движения накатом в нормальном режиме представляет собой период между временем t2n и временем t3n и период между временем t5n и временем t6n, показанными на фиг. 8.
[0084] Далее, предположим, что запрашиваемый крутящий момент от водителя изменяется с характеристикой, как показано на графике a на фиг. 9, посредством операции нажатия педали акселератора, когда режим движения представляет собой экономичный режим. Характеристика запрашиваемого крутящего момента от водителя, показанная как график a на фиг. 9, является идентичной характеристике, показанной как график a по фиг. 8.
[0085] Что предпринимается для управления в каждой точке между временем t1e и временем t6e, идентично тому, что предпринимается для управления в каждой точке между временем t1n и временем t6n. Тем не менее, поскольку выбираемое пороговое значение крутящего момента варьируется между экономичным режимом и нормальным режимом, время для переключения режима управления генератора 3 мощности отличается.
[0086] Пороговое значение (T1e_ON) крутящего момента экономичного режима превышает пороговое значение (T1n_ON) крутящего момента нормального режима. Соответственно, время (время t1e) переключения с обычного управления на управление движением накатом в экономичном режиме во время работы за счет подачи мощности становится раньше времени (времени t1n) для переключения с обычного управления на управление движением накатом в нормальном режиме.
[0087] Пороговое значение (T2e_OFF) крутящего момента экономичного режима превышает пороговое значение (T2n_OFF) крутящего момента нормального режима. По этой причине, при рекуперации, время (время t3e) для переключения с управления движением накатом на обычное управление в экономичном режиме наступает позже времени (времени t3n) для переключения с управления движением накатом на обычное управление в нормальном режиме. Соответственно, продолжительность времени движения накатом в экономичном режиме становится большей, чем в нормальном режиме при переключении с работы за счет подачи мощности на рекуперацию.
[0088] Кроме того, пороговое значение (T2e_ON) крутящего момента в экономичном режиме превышает пороговое значение (T2n_ON) крутящего момента в нормальном режиме. По этой причине, при рекуперации, время (время t4e) для переключения с обычного управления на управление движением накатом в экономичном режиме наступает раньше времени (времени t4n) для переключения с обычного управления на режим движения накатом в нормальном режиме.
[0089] Пороговое значение (T1e_OFF) крутящего момента в экономичном режиме превышает пороговое значение (T1n_OFF) крутящего момента в нормальном режиме. По этой причине, во время работы за счет подачи мощности, время (время t6e) переключения с управления движением накатом на обычное управление в экономичном режиме наступает позже времени (времени t6n) переключения с управления движением накатом на обычное управление в нормальном режиме. Как результат, при переключении с рекуперации на работу за счет подачи мощности, продолжительность времени движения накатом в экономичном режиме становится большей, чем в нормальном режиме.
[0090] Дополнительно, когда спортивный режим выбирается, поскольку акцент делается на функциональности ускорения, контроллер 10 транспортного средства запрещает управление движением накатом.
[0091] Как описано выше, в настоящем варианте осуществления, запрос на управление скоростью от водителя определяется с использованием датчика 9 открытия акселератора, запрашиваемый крутящий момент вычисляется на основе состояния транспортного средства и определенного запроса, и крутящий момент, сформированный в генераторе 3 мощности, управляется на основе запрашиваемого крутящего момента. Когда вычисленный запрашиваемый крутящий момент меньше пороговых значений (T1_ON, T2_ON) крутящего момента, запрашиваемый крутящий момент задается равным нулю, и генератор 3 мощности управляется на основе заданного запрашиваемого крутящего момента. Когда генератор 3 мощности приводится в действие по запросу водителем, управление движением накатом выполняется посредством задания запрашиваемого крутящего момента для управления равным нулю для диапазона приведения в движение, в котором эффективность приведения в движение не является удовлетворительной. Таким образом, неэффективное приведение в действие генератора 3 мощности может подавляться, и в силу этого может повышаться эффективность приведения в движение транспортного средства.
[0092] Дополнительно, в настоящем варианте осуществления, пороговое значение (T1_ON) крутящего момента, когда частота вращения генератора 3 мощности превышает предварительно определенное значение, превышает (T1_ON), когда частота вращения генератора 3 мощности меньше предварительно определенного значения. Когда частота вращения генератора 3 мощности является высокой, эффективность приведения в движение становится хуже по сравнению с тем, когда частота вращения генератора 3 мощности является низкой. По этой причине, посредством увеличения порогового значения (T1_ON) крутящего момента на стороне высоких частот вращения, больше порогового значения (T1_ON) крутящего момента на стороне низких частот вращения, и посредством расширения диапазона для выполнения управления движением накатом для стороны высоких частот вращения, неэффективное приведение в действие генератора 3 мощности может уменьшаться.
[0093] Далее описываются потери и эффективность генератора 3 мощности с использованием фиг. 10 и фиг. 11. Фиг. 10 является графиком, иллюстрирующим характеристики мощности потерь относительно частоты вращения генератора 3 мощности. Фиг. 11 является графиком, иллюстрирующим характеристики эффективности относительно частоты вращения генератора 3 мощности. Каждый график по фиг. 10 и фиг. 11 показывает различные характеристики в зависимости от абсолютной величины постоянного движущего крутящего момента.
[0094] Как показано на фиг. 10, когда генератор 3 мощности приводится в действие на определенной несущей частоте, мощность потерь увеличивается пропорционально каждому из частоты вращения и движущего крутящего момента. Потери генератора 3 мощности составляют главным образом сумму медных потерь, потерь в железе и механических потерь. Медные потери представляют собой потери, вызываемые посредством электрического сопротивления (проволочного резистора) медного провода, используемого для обмоточного провода катушки. Потери в железе представляют собой потери, вызываемые посредством железного сердечника катушки, и составляют главным образом сумму потерь на гистерезис и потерь на вихревые токи. Механические потери представляют собой потери, вызываемые посредством фрикционного сопротивления и сопротивления воздуха. Трение формируется в части подшипника посредством вращения генератора 3 мощности. Сопротивление воздуха представляет собой сопротивление воздуха, включающее в себя сопротивление воздуха, сформированное посредством подшипника ротора и вращения ротора.
[0095] Когда крутящий момент задается стабильным, мощность потерь увеличивается в квадратичной кривой относительно частоты вращения генератора 3 мощности. Тогда как когда крутящий момент задается стабильным, выходная мощность приведения в действие генератора 3 мощности увеличивается пропорционально частоте вращения генератора 3 мощности. По этой причине, по мере того, как увеличивается частота вращения при задании крутящего момента стабильным, величина увеличения мощности потерь становится больше по сравнению с величиной увеличения выходной мощности приведения в движение.
[0096] Другими словами, как показано на фиг. 11, эффективность состояния приведения в действие генератора 3 мощности становится плохой, когда скорость является высокой (высокая частота вращения или высокая скорость транспортного средства), и крутящий момент является низким. Кроме того, когда частота вращения генератора 3 мощности попадает в диапазон между средней частотой вращения и высокой частотой вращения, противоэлектродвижущая сила формируется в генераторе 3 мощности. Как результат, чтобы выводить крутящий момент при подавлении противоэлектродвижущей силы, требуется управление ослаблением поля, и потери посредством этого управления ослаблением поля также приводят к более низкой эффективности.
[0097] В настоящем варианте осуществления, пороговое значение (T1_ON) крутящего момента стороны высоких частот вращения задается равным значению, превышающему пороговое значение (T1_ON) крутящего момента стороны низких частот вращения, как описано выше. Другими словами, в диапазоне приведения в действие генератора мощности, пороговое значение крутящего момента задается таким образом, что диапазон выполнения для управления движением накатом становится более широким, когда крутящий момент является низким, и вращение является высоким. Таким образом, продолжительность времени состояния, в котором эффективность генератора 3 мощности является плохой, может сокращаться, и в силу этого может повышаться эффективность приведения в действие генератора 3 мощности.
[0098] Дополнительно, в настоящем варианте осуществления, управление движением накатом выполняется, когда частота вращения генератора 3 мощности превышает предварительно определенное пороговое значение частоты вращения; тем не менее, управление движением накатом не выполняется, когда частота вращения генератора 3 мощности меньше предварительно определенного порогового значения частоты вращения. Предварительно определенное пороговое значение частоты вращения является значением, полученным посредством преобразования нижнего предельного значения (VL), показанного на фиг. 4, в частоту вращения. Соответственно, для диапазона приведения в движение, меньшего порогового значения частоты вращения, точный крутящий момент по запросу может формироваться в генераторе 3 мощности, когда запрашиваемый крутящий момент от водителя является небольшим. Таким образом, в ситуации, в которой небольшой крутящий момент зачастую запрашивают, крутящий момент по запросу водителем может выводиться из генератора 3 мощности.
[0099] Дополнительно, в настоящем варианте осуществления, степень изменения крутящего момента, когда запрашиваемый крутящий момент изменяется из состояния, в котором запрашиваемый крутящий момент меньше пороговых значений (T1_OFF и T2_OFF) крутящего момента, на состояние, в котором запрашиваемый крутящий момент превышает пороговые значения (T1_OFF и T2_OFF) крутящего момента, задается согласно абсолютной величине запрашиваемого крутящего момента. В настоящем варианте осуществления, степень изменения крутящего момента, когда запрашиваемый крутящий момент изменяется из состояния, в котором запрашиваемый крутящий момент превышает пороговые значения (T1_ON и T2_ON) крутящего момента, на состояние, в котором запрашиваемый крутящий момент меньше пороговых значений (T1_ON и T2_ON) крутящего момента, задается согласно абсолютной величине запрашиваемого крутящего момента. Другими словами, при переключении режима управления между управлением движением накатом и обычным управлением, степень изменения крутящего момента задается согласно абсолютной величине запрашиваемого крутящего момента от водителя. Когда запрашиваемый крутящий момент является небольшим, может подавляться изменение крутящего момента, сопровождаемое посредством изменения режима управления. Как результат, быстрое изменение крутящего момента может подавляться, и естественное и комфортное приведение в движение может предоставляться водителю. Кроме того, когда запрашиваемый крутящий момент является большим, формируемый крутящий момент генератора 3 мощности изменяется с высокой скоростью отклика на изменение запрашиваемого крутящего момента при изменении режима управления. Таким образом, может достигаться управление для того, чтобы не формировалась задержка в ответ на операцию нажатия педали акселератора.
[0100] Кроме того, в настоящем варианте осуществления, режим движения выбирается из множества режимов движения, пороговое значение крутящего момента выбирается согласно режиму движения, выбранному из множества пороговых значений крутящего момента, и управление движением накатом выполняется, когда запрашиваемый крутящий момент меньше выбранного порогового значения крутящего момента. Таким образом, при рассмотрении режимов движения, имеющих различные коэффициенты энергопотребления, пороговое значение крутящего момента, которое соответствует режиму движения, может задаваться, и в силу этого может повышаться эффективность приведения в движение транспортного средства.
[0101] Кроме того, в качестве модифицированного примера настоящего варианта осуществления, чтобы предотвращать неравномерную работу в режиме управления, обычное управление может переключаться на управление движением накатом, когда состояние, в котором запрашиваемый крутящий момент попадает в пределы диапазона выполнения управления движением накатом, продолжается в течение определенного периода или больше. В частности, контроллер 10 транспортного средства вычисляет запрашиваемый крутящий момент от водителя с использованием карты приведения в движение и измеряет время, когда вычисленный запрашиваемый крутящий момент становится меньше пороговых значений (T1_ON и T2_ON) крутящего момента. Контроллер 10 транспортного средства продолжает измерение, когда продолжается состояние, в котором вычисленный запрашиваемый крутящий момент меньше пороговых значений (T1_ON и T2_ON) крутящего момента. Контроллер 10 транспортного средства выполняет управление движением накатом, когда измеренное время является предварительно определенным пороговым значением времени или больше. Как результат, при точном распознавании ситуации при движении, в которой запрашиваемый крутящий момент для управления должен корректироваться посредством управления движением накатом, может предотвращаться неравномерная работа. Дополнительно, когда управление для предотвращения неравномерной работы должно выполняться вследствие времени, описанного выше, значения пороговых значений (T1_ON и T2_ON) крутящего момента и пороговых значений (T1_OFF и T2_OFF) крутящего момента могут быть идентичными или отличающимися.
Описание номеров ссылок
[0102] 1 - ведущее колесо
2 - дифференциал
3 - генератор мощности (MG: электромотор)
4 - датчик частоты вращения
5 - инвертор
6 - аккумулятор
7 - контроллер электромотора
8 - контроллер аккумулятора
9 - датчик открытия акселератора
10 - контроллер транспортного средства
11 - запоминающее устройство
Группа изобретений относится к способам для управления электротяговой системой транспортных средств. Способ управления крутящим моментом для управления крутящим моментом электромотора заключается в следующем. Определяют запрос на управление скоростью, запрашиваемый от водителя, посредством использования датчика. Вычисляют запрашиваемый крутящий момент на основе запроса. Управляют крутящим моментом, сформированным в электромоторе, на основе запрашиваемого крутящего момента. Выполняют, когда запрашиваемый крутящий момент меньше предварительно определенного порогового значения крутящего момента, управление движением накатом для задания запрашиваемого крутящего момента равным нулю и управляют электромотором на основе запрашиваемого крутящего момента, который задается равным нулю. При этом предварительно определенное пороговое значение крутящего момента, когда частота вращения электромотора превышает первое пороговое значение частоты вращения, превышает предварительно определенное пороговое значение крутящего момента, когда частота вращения электромотора меньше первого порогового значения частоты вращения. Также заявлено устройство управления крутящим моментом. Технический результат заключается в повышении эффективности приведения в действие электромотора. 2 н. и 6 з.п. ф-лы, 11 ил.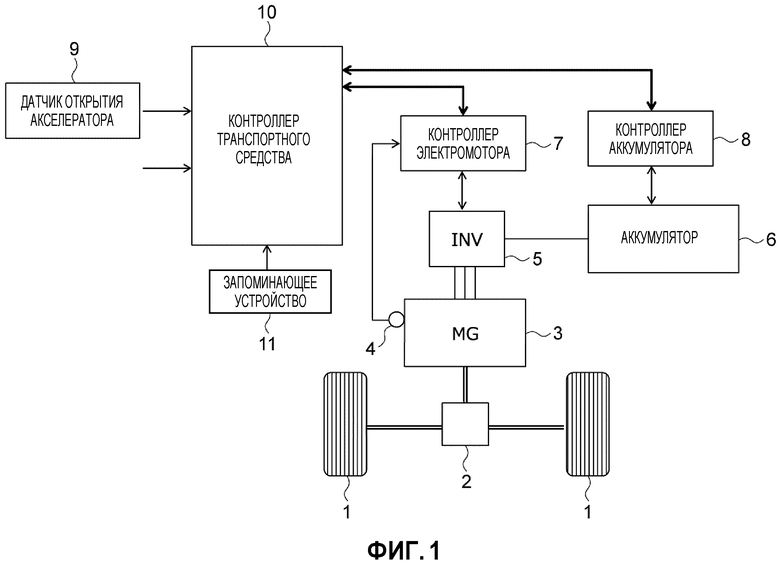
1. Способ управления крутящим моментом для управления крутящим моментом электромотора, содержащий этапы, на которых:
- определяют запрос на управление скоростью, запрашиваемое от водителя, посредством использования датчика;
- вычисляют запрашиваемый крутящий момент на основе запроса;
- управляют крутящим моментом, сформированным в электромоторе на основе запрашиваемого крутящего момента; и
- выполняют, когда запрашиваемый крутящий момент меньше предварительно определенного порогового значения крутящего момента, управление движением накатом для задания запрашиваемого крутящего момента равным нулю и управляют электромотором на основе запрашиваемого крутящего момента, который задается равным нулю,
- при этом предварительно определенное пороговое значение крутящего момента, когда частота вращения электромотора превышает первое пороговое значение частоты вращения, превышает предварительно определенное пороговое значение крутящего момента, когда частота вращения электромотора меньше первого порогового значения частоты вращения.
2. Способ управления крутящим моментом по п. 1, в котором:
- предварительно определенное пороговое значение крутящего момента ниже крутящего момента, требуемого для того, чтобы поддерживать постоянную скорость транспортного средства.
3. Способ управления крутящим моментом по п. 1 или 2, в котором:
- предварительно определенное пороговое значение крутящего момента задается равным постоянному значению на стороне рекуперации.
4. Способ управления крутящим моментом по п. 1 или 2, в котором:
- управление движением накатом выполняется, когда частота вращения электромотора превышает второе пороговое значение частоты вращения, и
- управление движением накатом не выполняется, когда частота вращения электромотора меньше второго порогового значения частоты вращения.
5. Способ управления крутящим моментом по п. 1 или 2, дополнительно содержащий этап, на котором:
- задают степень изменения крутящего момента, когда запрашиваемый крутящий момент изменяется из состояния, в котором запрашиваемый крутящий момент меньше предварительно определенного порогового значения крутящего момента, на состояние, в котором запрашиваемый крутящий момент превышает предварительно определенное пороговое значение крутящего момента, или степень изменения крутящего момента, когда запрашиваемый крутящий момент изменяется из состояния, в котором запрашиваемый крутящий момент превышает предварительно определенное пороговое значение крутящего момента, на состояние, в котором запрашиваемый крутящий момент меньше предварительно определенного порогового значения крутящего момента, согласно запрашиваемому крутящему моменту.
6. Способ управления крутящим моментом по п. 1 или 2, в котором:
- управление движением накатом выполняется, когда состояние, в котором запрашиваемый крутящий момент меньше предварительно определенного порогового значения крутящего момента, продолжается в течение определенного периода времени или больше.
7. Способ управления крутящим моментом по п. 1 или 2, дополнительно содержащий этапы, на которых:
- выбирают режим движения транспортного средства, включающего в себя электромотор, из множества режимов движения; и
- выбирают предварительно определенное пороговое значение крутящего момента из множества пороговых значений крутящего момента согласно выбранному режиму движения,
- при этом управление движением накатом выполняется, когда запрашиваемый крутящий момент меньше выбранного порогового значения крутящего момента.
8. Устройство управления крутящим моментом, содержащее:
- датчик открытия акселератора для определения открытия акселератора;
- датчик частоты вращения для определения частоты вращения электромотора;
- запоминающее устройство для сохранения карты, указывающей относительную взаимосвязь между крутящим моментом электромотора, частотой вращения и открытием акселератора; и
- контроллер для управления электромотором,
- при этом контроллер:
- вычисляет крутящий момент, который соответствует открытию акселератора и частоте вращения, в качестве запрашиваемого крутящего момента от водителя при обращении к карте,
- управляет электромотором таким образом, что формируемый крутящий момент, сформированный в электромоторе, совпадает с запрашиваемым крутящим моментом, когда запрашиваемый крутящий момент превышает предварительно определенное пороговое значение крутящего момента, и
- управляет электромотором таким образом, что формируемый крутящий момент становится нулевым, посредством задания запрашиваемого крутящего момента равным нулю, когда запрашиваемый крутящий момент меньше предварительно определенного порогового значения крутящего момента, и
предварительно определенное пороговое значение крутящего момента, когда частота вращения электромотора превышает первое пороговое значение частоты вращения, превышает предварительно определенное пороговое значение крутящего момента, когда частота вращения электромотора меньше первого порогового значения частоты вращения.
| JP 2012116272 A, 21.06.2012 | |||
| WO 2013065167 A1, 10.05.2013 | |||
| JP 2012086772 A, 10.05.2012 | |||
| СПОСОБ УПРАВЛЕНИЯ ТЯГОВЫМ ПРИВОДОМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2548832C2 |

