Область техники
Настоящее изобретение относится к устройству управления быстрым замедлением гибридного транспортного средства, которое оснащается двигателем и электромотором в качестве источников мощности и муфтой, расположенной между ними.
Уровень техники
Как раскрыто в Патентном Документе 1 и других известных документах, широко известно гибридное транспортное средство, которое имеет, в качестве приводной системы транспортного средства, двигатель, трансмиссию, электромотор (обычно, электромотор-генератор), размещенный между двигателем и трансмиссией, и муфту, размещенную между электромотором и двигателем, чтобы функционально соединять и рассоединять этот электромотор и двигатель.
В Патентном Документе 1 раскрыто управление быстрым замедлением, которое выполняется в таком гибридном транспортном средстве. При управлении определяется замедление транспортного средства, и когда определенное замедление представляет собой быстрое замедление, превышающее предварительно определенное значение, муфта между электромотором и двигателем расцепляется, чтобы за счет этого отсоединять двигатель от электромотора и тем самым от ведущих ходовых колес. Другими словами, посредством расцепления муфты заранее на основе замедления транспортного средства подавляется нежелательный останов двигателя, вызываемый посредством чрезмерного снижения частоты вращения двигателя, возникающего в результате уменьшения скорости транспортного средства.
Тем не менее, при вышеуказанном управлении, в котором только расцепление муфты выполняется для быстрого замедления транспортного средства, зачастую возникает такая ситуация, что расцепление муфты через гидравлическое давление в определенной степени задерживается в зависимости от состояния, и, в таком случае, частота вращения двигателя переключается на резонансную частоту вращения (т.е. частоту вращения двигателя, которая вызывает резонанс колебательной системы, включающей в себя подвеску двигателя), так что в силу этого повышается вероятность вибрации днища в кузове транспортного средства.
Патентные документы
Патентный документ 1: публикация выложенной заявки на патент Японии (Tokkai) 2010-149630.
Сущность изобретения
Устройство управления быстрым замедлением согласно настоящему изобретению основано на гибридном транспортном средстве, в котором электромотор размещается между двигателем и ведущими ходовыми колесами, и двигатель и электромотор соединяются через муфту. Устройство управления быстрым замедлением оснащается средством определения быстрого замедления, которое определяет то, представляет собой или нет замедление транспортного средства быстрое замедление, равное или превышающее предварительно определенное значение, и когда во время движения транспортного средства с зацепленной муфтой средство определения быстрого замедления определяет то, что замедление представляет собой быстрое замедление, подача топлива в двигатель прекращается посредством средства отсечки топлива.
Другими словами, при быстром замедлении транспортного средства вследствие операции быстрого торможения водителем и т.п. прекращается подача топлива в двигатель. Соответственно, даже если частота вращения двигателя переключается на резонансную частоту вращения или близко к ней вследствие задержанного расцепления муфты, сгорание или детонация не формируются в двигателе, и за счет этого подавляется вибрация днища.
Согласно настоящему изобретению можно надежно не допускать нежелательной вибрации кузова транспортного средства, которая вызывается посредством изменения частоты вращения двигателя на резонансную частоту вращения или близко к ней.
Краткое описание чертежей
Фиг.1 является иллюстрацией одного примера силовой передачи гибридного транспортного средства, к которому на практике применяется настоящее изобретение.
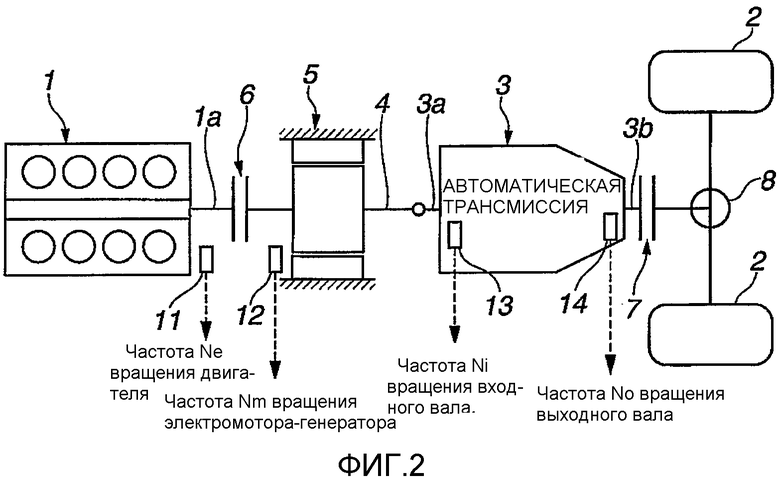
Фиг.2 является иллюстрацией другого примера силовой передачи гибридного транспортного средства, к которому на практике применяется настоящее изобретение.
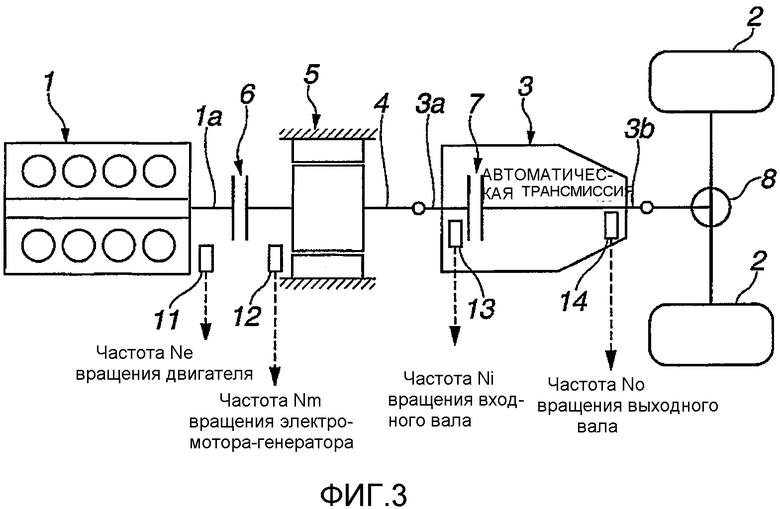
Фиг.3 является иллюстрацией еще одного другого примера силовой передачи гибридного транспортного средства, к которому на практике применяется настоящее изобретение.
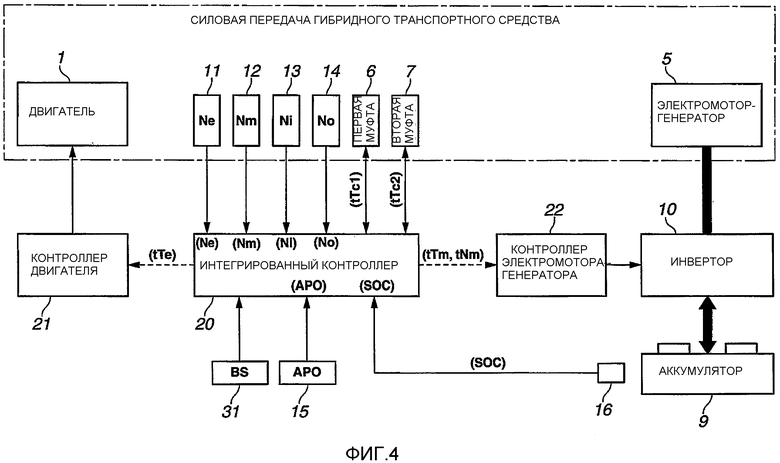
Фиг.4 является блок-схемой, иллюстрирующей систему управления для силовой передачи.
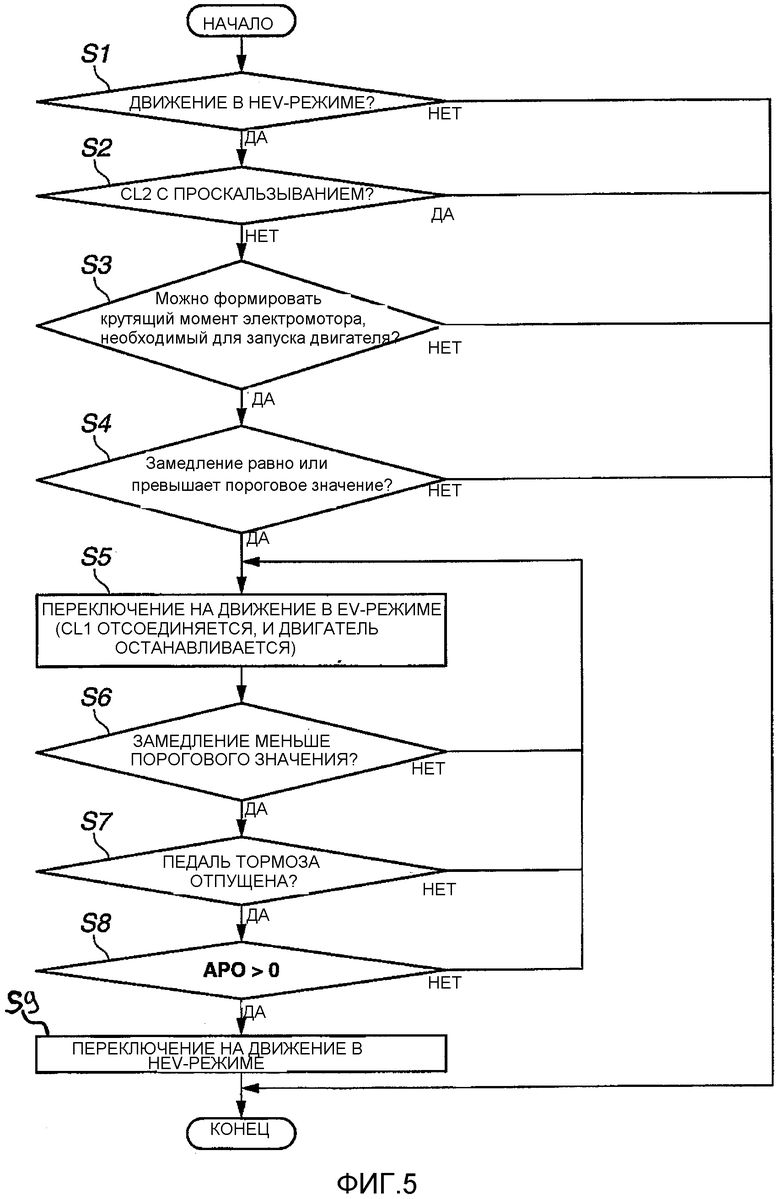
Фиг.5 является блок-схемой последовательности операций способа одного примера для выполнения управления быстрым замедлением согласно настоящему изобретению.
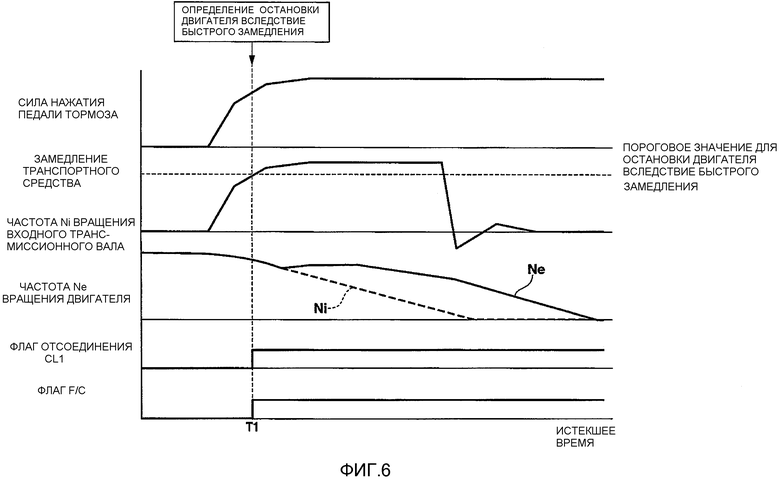
Фиг.6 является временной диаграммой, иллюстрирующей характер изменения различных параметров в момент, когда выполняется управление быстрым замедлением.
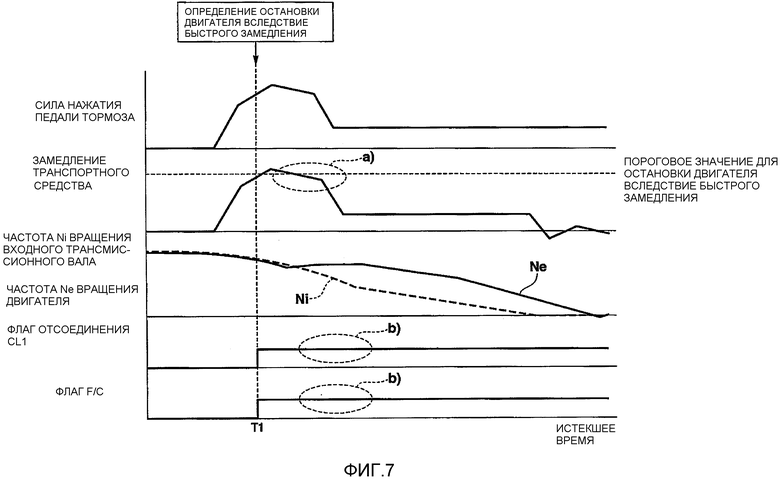
Фиг.7 является временной диаграммой, показывающей другой характер изменения различных параметров в момент, когда выполняется управление быстрым замедлением.
Варианты осуществления изобретения
Далее подробно описывается вариант осуществления настоящего изобретения со ссылкой на прилагаемые чертежи.
Во-первых, описывается базовая конструкция гибридного транспортного средства, к которому применяется настоящее изобретение. Фиг.1 показывает силовую передачу гибридного транспортного средства заднеприводного типа с передним расположением двигателя (FR), к которому применяется один вариант осуществления настоящего изобретения. Ссылочной позицией 1 обозначен двигатель, а 2 и 2 - ведущие ходовые колеса (задние ходовые колеса). Следует отметить, что настоящее изобретение не ограничено таким FR-типом и применимо к другим типам, например к FF-типу, RR-типу и т.д.
В силовой передаче гибридного транспортного средства, показанной на фиг.1, автоматическая трансмиссия 3 размещается последовательно в осевом направлении позади двигателя 1, аналогично стандартному заднеприводному транспортному средству, и вал 4, который передает вращение двигателя 1 (коленчатый вал 1a) на входной вал 3a автоматической трансмиссии 3, неразъемным образом содержит электромотор-генератор 5.
Электромотор-генератор 5 является синхронным электромотором, который использует постоянные магниты в качестве ротора, выступает в качестве не только электромотора (так называемое "движение за счет электроэнергии"), но также и генератора либо электрической динамо-машины (так называемая "рекуперация"), и размещается между двигателем 1 и автоматической трансмиссией 3, как упомянуто выше. Между электромотором-генератором 5 и двигателем 1, более конкретно, между валом 4 и коленчатым валом 1a двигателя размещается первая муфта 6, которая избирательно соединяет и отсоединяет двигатель 1 и электромотор-генератор 5.
Первая муфта 6 сконструирована с возможностью непрерывного варьирования своей перегрузочной способностью по передаточному крутящему моменту. Например, муфта 6 может быть сухой однодисковой муфтой нормально закрытого типа или гидравлической многодисковой муфтой идентичного типа, которая может варьировать свой передаточный крутящий момент посредством непрерывного управления регулированием гидравлического давления муфты посредством использования пропорционального электромагнитного клапана и т.п.
Кроме того, между электромотором-генератором 5 и ведущими ходовыми колесами 2, более конкретно, между валом 4 и входным трансмиссионным валом 3a размещается вторая муфта 7, которая избирательно соединяет и отсоединяет электромотор-генератор 5 и автоматическую трансмиссию 3.
Аналогично вышеуказанной первой муфте 6, вторая муфта 7 сконструирована с возможностью непрерывного варьирования своей перегрузочной способности по передаточному крутящему моменту. Например, муфта 7 может быть гидравлической многодисковой муфтой или сухой однодисковой муфтой, которая может варьировать свой передаточный крутящий момент посредством непрерывного управления регулированием гидравлического давления муфты посредством использования пропорционального электромагнитного клапана.
Автоматическая трансмиссия 3 имеет тип, который устанавливает уровень переменной скорости из семи скоростей переднего хода и одной скорости заднего хода посредством избирательного зацепления и расцепления множества фрикционных элементов (муфт и тормозов) для предоставления различных типов комбинации зацепления/расцепления фрикционных элементов. Другими словами, в автоматической трансмиссии 3 вращение, введенное через входной вал 3a, подвергается переключению скорости в соответствии с выбранным уровнем скорости и затем выводится в выходной вал 3b. Вращение выходного вала распределяется на правое и левое ведущие ходовые колеса (задние колеса) 2 через механизм 8 дифференциала. Следует отметить, что автоматическая трансмиссия 3 не ограничивается вышеуказанным ступенчатым типом. Другими словами, трансмиссия 3 может быть бесступенчатой трансмиссией.
В вышеуказанной силовой передаче могут устанавливаться два режима движения, один из которых представляет собой режим движения как электромобиля (EV-режим), в котором движение транспортного средства выполняется посредством использования только мощности электромотора-генератора 5 в качестве источника мощности, а другой представляет собой гибридный режим движения (HEV-режим), в котором движение транспортного средства выполняется посредством использования как двигателя 1, так и электромотора-генератора 5 в качестве источника мощности. Например, при низкой нагрузке и в состоянии низкой скорости транспортного средства, которое возникает, когда транспортное средство начинает движение из режима стояния на месте, требуется EV-режим. В этом EV-режиме мощность двигателя 1 не требуется, и таким образом, двигатель 1 останавливается, и первая муфта 6 расцепляется, а вторая муфта 7 зацепляется, и одновременно автоматическая трансмиссия 3 управляется так, чтобы находиться в состоянии передачи мощности. Посредством поддержания этого состояния движение транспортного средства выполняется посредством только электромотора-генератора 5.
Кроме того, при движении на высокой скорости и/или движении при высокой нагрузке транспортного средства, требуется HEV-режим. В этом HEV-режиме, как первая, так и вторая муфты 6 и 7 зацепляются, и одновременно автоматическая трансмиссия 3 управляется с переходом в состояние передачи мощности. В этом состоянии как вращение выходного вала двигателя 1, так и вращение выходного вала электромотора-генератора 5 вводятся во входной трансмиссионный вал 3a, и тем самым выполняется гибридное движение посредством этих двух источников мощности.
При замедлении транспортного средства электромотор-генератор 5 восстанавливает энергию посредством рекуперации энергии торможения, и в HEV-режиме электромотор-генератор 5 может восстанавливать избыточную энергию двигателя 1 в виде электроэнергии.
Когда режим движения транспортного средства переключается из EV-режима в HEV-режим, первая муфта 6 зацепляется, и запуск двигателя выполняется посредством использования крутящего момента электромотора-генератора 5. В ходе этой смены режима зацепление с проскальзыванием первой муфты 6 осуществляется посредством надлежащего управления перегрузочной способностью по передаточному крутящему моменту первой муфты, так что достигается плавное переключение режима.
Кроме того, вторая муфта 7 служит в качестве так называемой стартовой муфты, и когда транспортное средство практически уже начинает движение, зацепление с проскальзыванием второй муфты 7 осуществляется посредством надлежащего управления перегрузочной способностью по передаточному крутящему моменту второй муфты, так что достигается плавное начало движения транспортного средства при поглощении колебаний крутящего момента, даже если силовая передача не содержит преобразователя крутящего момента.
В компоновке с фиг.1, вторая муфта 7, предоставляемая в силовой передаче от электромотора-генератора 5 к ведущим ходовым колесам 2, размещается между электромотором-генератором 5 и автоматической трансмиссией 3. Тем не менее, если требуется, как видно из примера по фиг.2, вторая муфта 7 может размещаться между автоматической трансмиссией 3 и механизмом 8 дифференциала.
В примерах фиг.1 и 2 выделенное устройство в качестве второй муфты 7 предоставляется в позиции спереди или позиции позади автоматической трансмиссии 3. Тем не менее, если требуется, как видно из фиг.3, существующие фрикционные элементы в автоматической трансмиссии 3, используемые для установления скорости переднего хода или скорости заднего хода, могут быть использованы в качестве второй муфты 7. В этом случае вторая муфта 7 не всегда является одним фрикционным элементом. Другими словами, любой подходящий фрикционный элемент может быть второй муфтой 7 в соответствии с переменным уровнем скорости.
Фиг.4 показывает систему управления для силовой передачи гибридного транспортного средства, которая имеет такие конструкции, как показано на фиг.1-3.
Система управления оснащается интегрированным контроллером 20, который интегрировано управляет рабочими точками силовой передачи. Рабочие точки силовой передачи регулируются посредством целевого крутящего момента двигателя tTe, целевого крутящего момента tTm электромотора-генератора (или целевой частоты tNm вращения электромотора-генератора), целевой перегрузочной способности tTc1 по передаточному крутящему моменту первой муфты 6 и целевой перегрузочной способности tTc2 по передаточному крутящему моменту второй муфты 7.
Система управления содержит, по меньшей мере, датчик 11 частоты вращения двигателя, который определяет частоту Ne вращения двигателя, датчик 12 частоты вращения электромотора-генератора, который определяет частоту Nm вращения электромотора-генератора, датчик 13 частоты вращения входного вала, который определяет частоту Ni вращения входного трансмиссионного вала, датчик 14 частоты вращения выходного вала, который определяет частоту No вращения выходного трансмиссионного вала, датчик 15 степени открытия акселератора, который определяет степень нажатия педали акселератора (т.е. степень APO открытия акселератора), и датчик 16 состояния накопления электроэнергии, который определяет состояние SOC накопления электроэнергии аккумулятора 9, который накапливает электроэнергию для электромотора-генератора 5. Для определения вышеуказанных рабочих точек определенные сигналы из этих датчиков вводятся в интегрированный контроллер 20.
Датчик 11 частоты вращения двигателя, датчик 12 частоты вращения электромотора-генератора, датчик 13 частоты вращения входного вала и датчик 14 частоты вращения выходного вала размещаются, например, так, как показано на фиг.1-3.
На основе степени APO открытия акселератора, состояния SOC накопления электроэнергии и частоты No вращения выходного трансмиссионного вала (т.е. скорости VSP транспортного средства) в вышеуказанной информации, интегрированный контроллер 20 выбирает режим движения (т.е. EV-режим или HEV-режим), который реализует движущую силу транспортного средства, которую требует водитель, и одновременно вычисляет целевой крутящий момент tTe двигателя, целевой крутящий момент tTm электромотора-генератора (или целевую частоту tNm вращения электромотора-генератора), целевую перегрузочную способность tTc1 по передаточному крутящему моменту первой муфты 6 и целевую перегрузочную способность tTc2 по передаточному крутящему моменту второй муфты 7.
Информация относительно целевого крутящего момента tTe двигателя подается в контроллер 21 двигателя, так что контроллер 21 двигателя управляет двигателем 1 таким образом, что реальный крутящий момент Te двигателя становится целевым крутящим моментом tTe двигателя. Например, двигатель 1 является бензиновым двигателем, и крутящий момент Te двигателя управляется через дроссельный клапан.
В то же время, информация относительно целевого крутящего момента tTm электромотора-генератора (или целевой частоты tNm вращения электромотора-генератора) подается в контроллер 22 электромотора-генератора, так что контроллер 22 электромотора-генератора управляет электромотором-генератором 5 через инвертор 10 таким образом, что крутящий момент Tm (или частота Nm вращения) электромотора-генератора 5 становится целевым крутящим моментом tTm электромотора-генератора (или целевой частотой tNm вращения электромотора-генератора).
Интегрированный контроллер 20 подает в соответствующие соленоидные клапаны первой и второй муфт 6 и 7 соленоидные токи, которые соответствуют целевой перегрузочной способности tTc1 по передаточному крутящему моменту первой муфты 6 и целевой перегрузочной способности tTc2 по передаточному крутящему моменту второй муфты 7, соответственно, и управляет состояниями зацепления первой и второй муфт 6 и 7 таким образом, что перегрузочные способности Tc1 и Tc2 по передаточному крутящему моменту первой и второй муфт 6 и 7 становятся целевыми перегрузочными способностями tTc1 и tTc2 по передаточному крутящему моменту, соответственно.
Вышеуказанная система управления оснащается датчиком 31 хода тормоза, который определяет регулируемую переменную (BS) педали тормоза, нажимаемой водителем, и на основе регулируемой переменной BS педали тормоза и скорости VSP транспортного средства, интегрированный контроллер 20 вычисляет целевое замедление. После этого интегрированный контроллер 20 управляет рекуперированной тормозной силой, сформированной посредством электромотора-генератора 5, и одновременно управляет тормозными блоками (не показаны), смонтированными на ходовых колесах, таким образом, что транспортное средство подвергается замедлению, которое соответствует целевому замедлению.
Когда при движении транспортного средства в HEV-режиме с двигателем 1 и электромотором-генератором 5, соединенными через первую муфту 6, скорость транспортного средства уменьшается вследствие замедления, частота Ne вращения двигателя также уменьшается таким способом, как определяется посредством передаточного отношения автоматической трансмиссии 3. В соответствии с настоящим изобретением следующее управление быстрым замедлением выполняется посредством интегрированного контроллера 20, чтобы не допускать чрезмерного понижения частоты Ne вращения двигателя и нежелательной вибрации днища, которые вызываются за счет чрезмерного понижения частоты вращения двигателя.
Фиг.5 показывает блок-схему последовательности операций способа, которая показывает последовательность этапов работы, выполняемую для осуществления управления быстрым замедлением. Последовательность этапов работы может многократно выполняться при движении транспортного средства или может многократно выполняться в ходе операции с педалью тормоза с использованием начального нажатия педали тормоза в качестве триггера.
На этапе S1 выполняется определение в отношении того, представляет собой или нет настоящий режим HEV-режим, в котором двигатель 1 и электромотор-генератор 5 соединяются через первую муфту 6. В случае EV-режима, в котором расцепляется первая муфта 6, основная процедура завершается.
Затем на этапе S2 выполняется определение в отношении того, находится или нет вторая муфта 7, размещаемая между электромотором-генератором 5 и ведущими ходовыми колесами 2, в состоянии зацепления с проскальзыванием. Вторая муфта 7 может управляться в состоянии зацепления с проскальзыванием, чтобы обеспечивать различную скорость вращения между передними и задними элементами второй муфты в различных состояниях в целях поглощения колебаний крутящего момента, которые неизбежно формируются в силовой передаче от электромотора-генератора 5 к ведущим ходовым колесам 2. Когда вторая муфта 7 находится в состоянии зацепления с проскальзыванием во время быстрого замедления транспортного средства, нежелательное уменьшение частоты Ne вращения двигателя до уровня ниже числа оборотов холостого хода может подавляться посредством скольжения второй муфты 7. Соответственно, для экономии электроэнергии, необходимой для повторного запуска двигателя, не выполняется следующий процесс.
Когда вторая муфта 7 находится в состоянии полного зацепления, последовательность операций переходит от этапа S2 к этапу S3, и на этом этапе S3, для нахождения дополнительного состояния для остановки двигателя 1 выполняется определение в отношении того, позволяет или нет текущее состояние формировать крутящий момент электромотора, необходимый для повторного запуска двигателя 1, в отношении состояния SOC накопления электроэнергии аккумулятора 9, состояния прогрева двигателя 1 и т.д. Например, в случае, если состояние SOC накопления электроэнергии аккумулятора 9 является недостаточным, основная процедура завершается, поскольку повторный запуск двигателя 1 после того, как он остановлен, затруднен.
Затем на этапе S4 выполняется определение в отношении того, равно или превышает либо нет замедление транспортного средства пороговое значение. Это замедление транспортного средства может быть вычислено, например, из изменения частоты No вращения выходного трансмиссионного вала (другими словами, изменения скорости VSP транспортного средства). Тем не менее, если требуется, замедление транспортного средства может быть непосредственно получено посредством датчика замедления (G-датчика). Пороговое значение может задаваться равным, например, примерно 0,3G (-0,3G при ускорении). Тем не менее, если требуется, пороговое значение может быть переменным с учетом скорости VSP транспортного средства и т.п.
Когда определено, что замедление представляет собой быстрое замедление, равное или превышающее пороговое значение, последовательность операций переходит к этапу S5, на котором режим движения транспортного средства изменяется с HEV-режима на EV-режим. Более конкретно, расцепляется первая муфта 6, и одновременно прекращается подача топлива в двигатель 1 через контроллер 21 двигателя (т.е. отсечка топлива). Двигатель 1 является, например, бензиновым двигателем, который оснащается клапанами впрыска топлива, которые впрыскивают топливо в цилиндры или впускные порты двигателя. Другими словами, при необходимости отсечки топлива прекращается впрыск топлива из клапанов впрыска топлива. Задержка механических действий и задержка изменения гидравлического давления не оказывает серьезное влияние на прекращение впрыска топлива, и таким образом, прекращение впрыска топлива может немедленно выполняться при формировании сигнала инструкции без запаздывания реагирования.
На этапе S6 выполняется определение в отношении того, уменьшилось или нет замедление транспортного средства до значения, меньшего вышеуказанного порогового значения, и на этапе S7 для нахождения дополнительного состояния выполняется определение в отношении того, отпущена педаль тормоза или нет, посредством проверки хода BS тормоза, силы нажатия педали тормоза (которая вычисляется из хода BS тормоза) или фактического тормозного давления. Кроме того, в настоящем изобретении, на этапе S8 для нахождения дополнительного состояния выполняется определение в отношении того, нажата или нет педаль акселератора водителем, посредством проверки информационного сигнала, определенного посредством датчика 15 степени открытия акселератора. До момента времени, когда устанавливаются вышеуказанные три состояния, последовательность операций возвращается к этапу S5, и тем самым движение транспортного средства в EV-режиме продолжается.
Когда устанавливаются три состояния на этапах S6, S7 и S8, последовательность операций переходит к этапу S9, на котором режим движения транспортного средства изменяется с EV-режима на HEV-режим. Другими словами, двигатель 1 повторно запускается посредством выполнения проворачивания двигателя 1 за счет силы электромотора-генератора 5 при одновременном принудительном переключении первой муфты 6 из состояния зацепления с проскальзыванием на состояние полного зацепления. Когда, после перехода последовательности операций к этапу S9, режим движения транспортного средства, который определяется посредством скорости VSP транспортного средства и степени APO открытия акселератора, уже изменен на EV-режим, EV-режим непрерывно поддерживается без изменения на HEV-режим, как и следовало ожидать.
Фиг.6 является временной диаграммой, иллюстрирующей характер изменения различных параметров в момент, когда выполняется вышеуказанное управление быстрым замедлением. Как показано на временной диаграмме, сравнительно проиллюстрированы шесть факторов, которые представляют собой силу нажатия педали тормоза, замедление транспортного средства, частоту Ni вращения входного трансмиссионного вала (которая определяется посредством скорости VSP транспортного средства и передаточного отношения трансмиссии), частоту Ne вращения двигателя, флаг отсоединения первой муфты, который соответствует сигналу инструкции для инструктирования расцепления первой муфты 6, и флаг F/C, который соответствует сигналу инструкции для инструктирования прекращения подачи топлива.
Пример, проиллюстрированный посредством фиг.6, соответствует случаю, в котором педаль тормоза нажимается водителем, и транспортное средство полностью останавливается с нажатой педалью тормоза. Как показано на диаграмме, в результате нажатия педали тормоза замедление транспортного средства быстро увеличивается, и во время T1, когда замедление транспортного средства превышает пороговое значение, замедление определяется в качестве быстрого замедления на этапе S4. При этом определении включаются флаг отсоединения первой муфты и флаг F/C, и расцепляется первая муфта 6, и одновременно прекращается подача топлива в двигатель 1.
До момента времени, когда расцепляется первая муфта 6, частота Ni вращения входного трансмиссионного вала и частота Ne вращения двигателя равны. Тем не менее, после расцепления первой муфты 6, частота Ni вращения входного трансмиссионного вала уменьшается, как указано посредством пунктирной линии, вместе со скоростью VSP транспортного средства, и частота Ne вращения двигателя 1, подвергнутого прекращению подачи топлива, уменьшается, как указано посредством сплошной линии. Соответственно, частота Ne вращения двигателя пересекает резонансную частоту вращения при отделении от частоты Ni вращения входного трансмиссионного вала. Тем не менее, на этой стадии двигатель 1 не находится в состоянии, подвергнутом сгоранию или детонации, и таким образом, не возникает вибрация днища, вызываемая посредством резонанса. На временной диаграмме по фиг.6 переключение на HEV-режим на этапе S8 не показано, поскольку педаль тормоза продолжает нажиматься.
Фиг.7 показывает пример, который отличается посредством другой временной диаграммы. Другими словами, пример соответствует случаю, в котором после быстрого замедления педаль тормоза частично возвращается в направлении позиции полного отпускания, и транспортное средство полностью останавливается с поддерживаемой небольшой силой нажатия педали тормоза. Соответственно, после того, как расцепление первой муфты 6 и прекращение подачи топлива в двигатель 1 выполняются при определении быстрого замедления во время T1, замедление транспортного средства понижается до значения, меньшего порогового значения, как указано посредством (a) на временной диаграмме. Тем не менее, поскольку педаль тормоза не полностью отпускается, EV-режим продолжается вследствие определения на этапе S7. Другими словами, как указано посредством (b) на временной диаграмме, продолжается отсоединенное состояние первой муфты 6 и состояние прекращения подачи топлива.
Как упомянуто выше, даже когда в состоянии нажатой педали тормоза замедление транспортного средства становится небольшим, состояние остановки двигателя 1 продолжается, и в силу этого, даже когда операция уменьшения скорости выполняется таким образом, чтобы поддерживать замедление равным или примерно равным пороговому значению, может не допускаться неравномерная работа двигателя 1, т.е. явление, в котором повторяются остановка и повторный запуск двигателя 1, и за счет этого подавляется потребление электроэнергии, вызываемое посредством бесполезного повторного запуска двигателя.
После того, как отпускается педаль тормоза, двигатель 1 повторно запускается при нажатии педали акселератора водителем, и таким образом, повторный запуск двигателя 1 может быть выполнен во время, которое удовлетворяет намерению водителя по повторному запуску двигателя, и тем самым не допускается возникновения некомфортного ощущения у водителя.
В вышеуказанном варианте осуществления три фактора, которые представляют собой замедление транспортного средства, отпускание педали тормоза и нажатие педали акселератора составляют соответствующие состояния для повторного запуска двигателя. Тем не менее, если требуется, может разрешаться повторный запуск двигателя посредством использования одного или двух факторов в качестве состояний.
Изобретение относится к гибридным транспортным средствам. Устройство управления быстрым замедлением гибридного транспортного средства, в котором электромотор размещен между двигателем и ведущим ходовым колесом, а двигатель и электромотор соединены через муфту, содержит средство определения быстрого замедления, равного или превышающего предварительно определенное значение. Также устройство содержит средство отсечки топлива, прекращающее подачу топлива в двигатель, когда при движении транспортного средства с зацепленной муфтой средство определения быстрого замедления определяет то, что замедление представляет собой быстрое замедление. Исключается вибрация кузова транспортного средства. 5 з.п. ф-лы, 7 ил.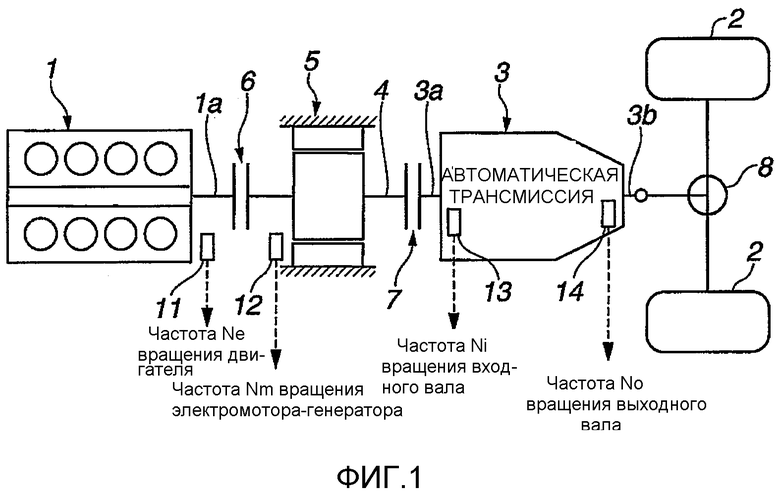
1. Устройство управления быстрым замедлением гибридного транспортного средства, в котором электромотор размещен между двигателем и ведущим ходовым колесом, и двигатель и электромотор соединены через муфту, причем устройство управления быстрым замедлением содержит:
средство определения быстрого замедления, которое определяет то, представляет ли собой или нет замедление транспортного средства быстрое замедление, равное или превышающее предварительно определенное значение; и
средство отсечки топлива, которое прекращает подачу топлива в двигатель, когда при движении транспортного средства с зацепленной муфтой средство определения быстрого замедления определяет то, что замедление представляет собой быстрое замедление.
2. Устройство по п.1, дополнительно содержащее средство расцепления муфты, которое расцепляет муфту, когда при движении транспортного средства с зацепленной муфтой средство определения быстрого замедления определяет то, что замедление представляет собой быстрое замедление.
3. Устройство по п.1 или 2, в котором после того, как уменьшение скорости транспортного средства завершается при замедлении ниже предварительно определенного значения, разрешается повторный запуск двигателя согласно отпусканию педали тормоза водителем.
4. Устройство по п.1 или 2, в котором после того, как уменьшение скорости транспортного средства завершается при замедлении ниже предварительно определенного значения, разрешается повторный запуск двигателя согласно операции элемента акселератора водителем.
5. Устройство по п.1 или 2, дополнительно содержащее средство определения способности к запуску, которое определяет то, позволяет ли или нет текущее состояние формировать крутящий момент электромотора, необходимый для повторного запуска двигателя, в отношении состояния накопления электроэнергии аккумулятора, причем средство отсечки топлива прекращает подачу топлива в двигатель, когда определенное текущее состояние представляет собой дополнительное состояние для того, чтобы обеспечивать крутящий момент электромотора, необходимый для повторного запуска двигателя.
6. Устройство по п.1 или 2, в котором между электромотором и ведущим ходовым колесом расположена вторая муфта, причем когда вторая муфта находится в состоянии зацепления с проскальзыванием, средство отсечки топлива не прекращает подачу топлива в двигатель.
| JP 2010149630 A, 08.07.2010 | |||
| JP 2006161565 A, 22.06.2006 | |||
| JP 2004239161 A, 26.08.2004 | |||
| Способ регулирования давления в антиблокировочной тормозной системе транспортного средства при торможении | 1990 |
|
SU1831454A3 |

