Изобретение относится к способу подводного позиционирования несамоходной подводной техники и удержания ее в заданных координатах. Известны следующие системы для удержания судна в точке:
- якорное позиционирование;
- динамическое позиционирование.
Система якорного позиционирования с точки зрения энергетических затрат на функционирование системы при длительной стоянке является наиболее предпочтительной (динамическое позиционирование предусматривает постоянные энергозатраты на функционирование судовых движителей). Как правило, якорную систему используют при постановке плавучих буровых платформ и буровых судов, эксплуатируемых на небольших глубинах.
Известен способ постановки бурового судна на якорно-швартовную систему в ледовых условиях, включающий установку якорей на морское дно судами-заводчиками якорей в симметричные относительно бурового судна точки. RU 2676927 С1, опубл. 11.01.2019 г.
При этом к концевой скобе каждой якорной связи с помощью троса-проводника прикреплен плавучий буй, что позволяет с помощью телеуправляемых подводных аппаратов привязного типа, опускаемых с бурового судна через его турель, произвести захват буя якорной связи и вместе с ним переместить якорную связь к буровому судну с последующим ее подъемом на палубу турели, отсоединением буя и наматыванием на барабан тяговой лебедки турели.
После установки всех якорных связей производят одновременную симметричную обтяжку парных якорных связей с якорями с помощью тяговых лебедок турели с последующим фиксированием якорных связей на ленточных стопорах турели.
Недостатками данного способа постановки являются:
1) на большой глубине наличие подводных течений может привести к запутыванию длинных якорных связей между собой и привязным телеуправляемым подводным аппаратом;
2) наличие длинных якорных связей потребует значительного увеличения канатоемкости и тягового усилия лебедок для спуска якорей, что приведет к разработке и установке нестандартного спускоподъемного оборудования на всех судах заводчиках;
3) данный способ предполагает якорение бурового судна без возможности позиционирования за счет изменения якорных связей;
4) способ не предусматривает позиционирование подводного объекта. Техническим результатом изобретения является обеспечение возможности точного адаптивного длительного позиционирования устройства типа «купол» для ликвидации подводных разливов нефти.
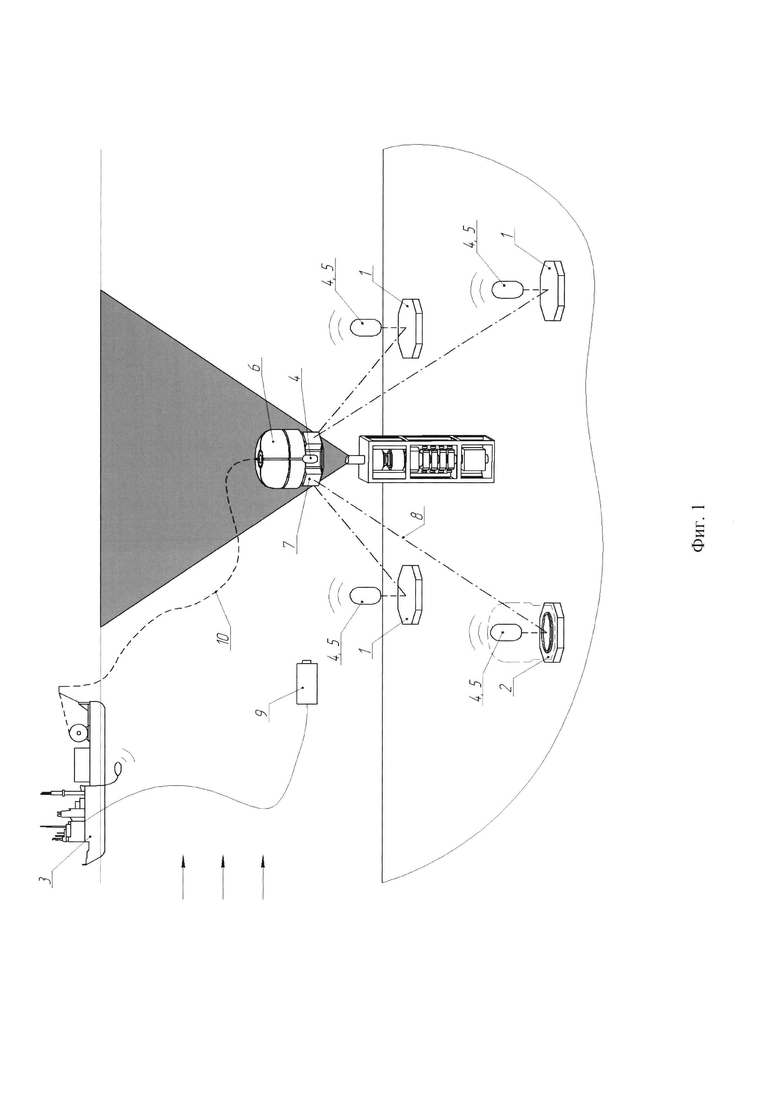
Система подводного позиционирования устройства типа «купол» основана на принципе якорного позиционирования и предназначена для наведения и адаптивного позиционирования устройства для локализации и сбора вытекающей под водой нефти над местом аварийной утечки. Система представляет собой функционально связанный набор технических средств (фиг.1), таких как:
- три якоря 1 и якорь-балласт 2, закрепляемый на «куполе» и выполняющий роль балласта при проведении операции погружения «купола» и роль якоря при эксплуатации. Указанные элементы системы спускаются с судна-носителя 3 при помощи спускоподъемного устройства (СПУ) последовательно и устанавливаются в заданные точки с учетом воздействия подводных течений (на фиг.1 - направленные стрелки).
- пять гидроакустических маяков-ответчиков 4, четыре из которых расположены в буях 5, закрепленных на каждом якоре, и один на «куполе» 6.
- четыре электрические лебедки глубоководного исполнения 7 с синтетическим тросом 8, установленные равномерно по периметру «купола» в четырех направлениях.
- датчики системы контроля среды и подводный блок системы управления.
Спуск системы осуществляется с одного судна-носителя, оснащенного специальным спускоподъемным устройством. При этом судно находится на безопасном расстоянии от зоны разлива нефти (на фиг. 1 - темный участок).
Контролирование операций спуска, постановки и функционирования системы производится с привлечением возможностей комплекса телеуправляемого необитаемого подводного аппарата (ТНПА) 9, размещаемого на том же судне.
Управление системой осуществляется с поста управления, расположенного на судне-носителе. Энергообеспечение, управляющие и информационные сигналы передаются между пунктом управления судна-носителя и аппаратурой управления «купола» по кабель-тросу 10.
Позиционирование «купола» может производиться на больших глубинах. Канатоемкость лебедок подобрана исходя из условия размещения «купола» над различным устьевым оборудованием и обеспечения его постановки с поверхности моря при нахождении судна-носителя вне пожароопасной зоны действия нефтяного пятна с учетом отсутствия данных о дебите вытекающей нефти (данных о силовом воздействии потока).
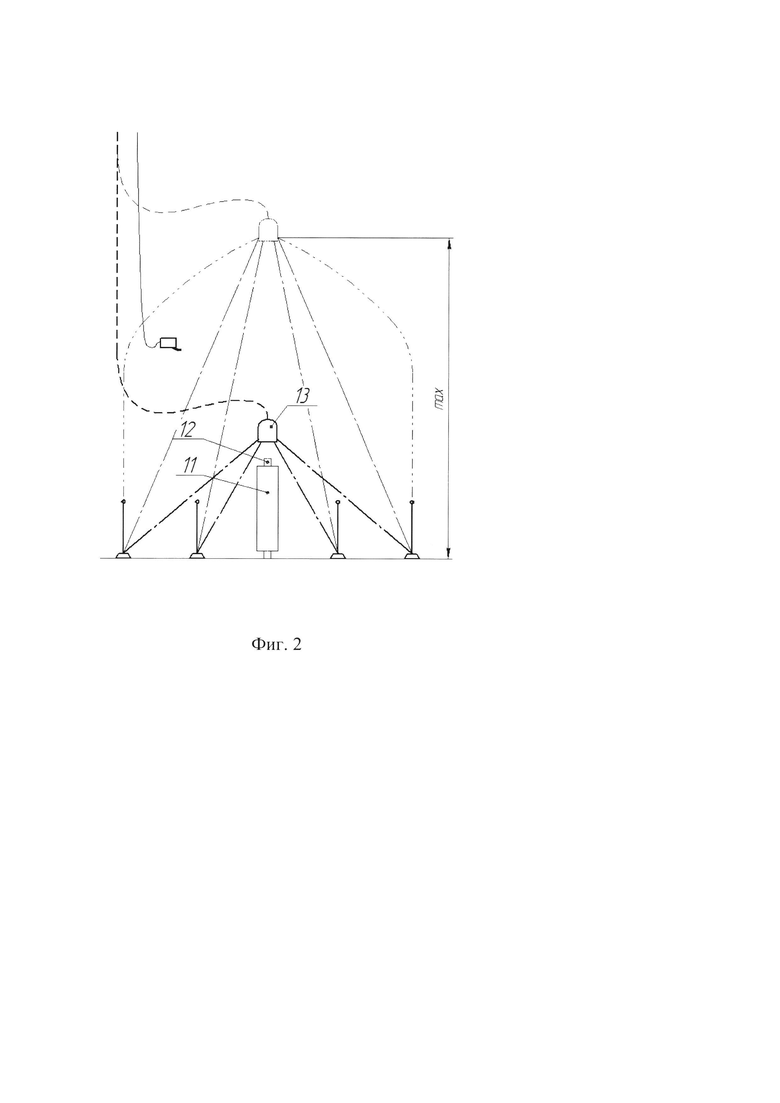
Граница зоны перемещения (фиг. 2 - на чертеже обозначена )
)
позволяет установить «купол» над подводным противовыбросовым оборудованием 11, в том числе и над оставшимся вертикальным участком обломленной аварийной водоотделяющей колонны 12 (райзера).
Суть изобретения заключается в раскреплении подводного объекта («купола») регулируемыми якорными связями, устанавливаемыми на донной поверхности симметрично вокруг места утечки нефти. Горизонтальные и вертикальные перемещения «купола» в заданном пространстве осуществляются путем изменения длин якорных связей при помощи установленных на «куполе» лебедок. При этом управление лебедками осуществляется дистанционно на основании показаний датчиков системы контроля среды, гидроакустических маяков ответчиков и телекамер ТНПА.
Модель использования системы следующая.
После обследования зоны разлива нефти, оценки ситуации и определения схемы постановки системы, начинается последовательный спуск трех якорей с маяками-ответчиками. Для экономии времени на выполнение спуско-подъемных операций может быть предусмотрен одновременный спуск пакета из трех якорей с возможностью подводного перемещения связи средствами ТНПА и подводной отстыковки каждого якоря от пакета.
Маяк-ответчик размещен на буе, который обладает положительной плавучестью и в подводном положении располагается над якорем на синтетическом тросе длиной, достаточной для обеспечения видимости и функционирования гидроакустического маяка-ответчика в случае заглубления якоря в ил.
Далее производится спуск «купола» с якорем-балластом. Якорь-балласт закреплен на «куполе» посредством быстроразъемного соединения и имеет связь с концом синтетического троса одной из лебедок «купола». Такое конструктивное решение обосновано следующим:
- блочное исполнение «купола» с якорем-балластом сокращает время на постановку системы;
- якорь-балласт придает отрицательную плавучесть «куполу», который сам по себе для обеспечения натяжения якорных тросов в рабочем положении обладает положительной плавучестью;
- применение якоря балласта способствует минимизации сноса «купола» с кабель-тросом от воздействия подводных течений.
После постановки «купола» с якорем-балластом на дно производится спуск разгрузочного якоря транспортировочного трубопровода системы транспортировки нефтяной смеси. ТНПА осуществляет разматывание свободного конца якорного троса с барабана лебедки «купола» до соединительного элемента сбухтованного транспортировочного трубопровода с последующим их зацеплением.
Далее, при помощи лебедок и ТНПА осуществляется подтягивание и подключение транспортировочного трубопровода к «куполу». После ТНПА производит отцепление якорного троса от транспортировочного трубопровода, его размотку и зацепление на соответствующем якоре. Аналогично производится размотка и зацепление якорной связи с другими якорями.
Далее, автоматически или с привлечением средств ТНПА производится расстыковка «купола» и якоря-балласта. За счет наличия на корпусе блоков плавучести «купол» с транспортировочным трубопроводом обладает положительной плавучестью, и после расстыковки начинает всплывать до момента натяжения якорных тросов. Держащая сила каждого якоря рассчитана на удержания «купола» с учетом силового воздействия потока вытекающей нефти и увеличения его плавучести в результате наполнения газовыми гидратами.
С судна-носителя подается команда на разматывание всех лебедок и происходит всплытие «купола» на максимальную высоту (фиг. 2 - на чертеже обозначена - max). После этого за счет выборки/травления якорных тросов производится центрирование устройства над источником утечки.
После выполнения центрирования подается команда на выбирание якорных тросов всеми четырьмя лебедками. «Купол» перемещается в промежуточное положение над источником утечки, при этом осуществляется контроль положения при помощи гидроакустических средств, телекамер ТНПА и регистрация параметров смеси датчиками системы контроля среды.
Для исключения срыва «купола» от воздействия вытекающего потока, производится запуск системы транспортировки нефтяной смеси в режиме 50% мощности.
Дальнейшее позиционирование осуществляется за счет выбирания якорных тросов методом последовательного приближения «купола» в необходимую точку. Оператор оценивает оптимальную зону расположения 13 (фиг. 2) «купола» (с точки зрения сбора наибольшего объема локализуемой нефтяной смеси) на основании обработанных данных, поступающих на мониторы поста управления с телекамер ТНПА, датчиков системы контроля среды и гидроакустических средств.
После установки в оптимальную рабочую зону, система может быть переведена в автоматический режим длительного адаптивного позиционирования, при котором управлении лебедками производится без участия оператора на основании обработанных системой управления показаний датчиков контроля среды.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство типа "Купол" для ликвидации подводных разливов нефти в комплекте с технологическим оборудованием | 2019 |
|
RU2723799C1 |
| Малогабаритный телеуправляемый подводный аппарат | 2021 |
|
RU2775894C1 |
| Комплекс для осуществления подводных работ | 2022 |
|
RU2785237C1 |
| Способ навигационного оборудования морского района и самоходный подводный аппарат для его осуществления и арктическая подводная навигационная система для вождения и навигационного обеспечения надводных и подводных объектов навигации в стесненных условиях плавания | 2021 |
|
RU2773538C1 |
| Способ проведения подводно-подледного сейсмопрофилирования с использованием перемещаемой подводным судном донной сейсморазведочной косы и технологический комплекс для его осуществления | 2014 |
|
RU2663308C2 |
| СПОСОБ ПОСТАНОВКИ БУРОВОГО СУДНА С ТУРЕЛЬЮ НА СИСТЕМУ ЯКОРНОГО УДЕРЖАНИЯ В ЛЕДОВЫХ УСЛОВИЯХ | 2012 |
|
RU2508220C2 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2014 |
|
RU2563074C1 |
| Подводный робототехнический комплекс | 2015 |
|
RU2609618C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2446983C2 |
Изобретение относится к подводному позиционированию несамоходной подводной техники и удержанию ее в заданных координатах, в частности специализированного устройства типа «купол» для ликвидации подводных разливов нефти. Техническим результатом изобретения является обеспечение возможности точного адаптивного длительного позиционирования устройства типа «купол» для ликвидации подводных разливов нефти. Для снижения энергетических затрат по сравнению с применением системы динамического позиционирования предлагается система якорного позиционирования, состоящая из якорей с гидроакустическими маяками-ответчиками, электрических лебедок глубоководного исполнения, датчиков системы контроля среды, гидроакустического маяка-ответчика «купола». Система подводного позиционирования позволяет устанавливать, удерживать и управлять перемещением специализированного устройства типа «купол» с поверхности воды с судна-носителя, находящегося в безопасной зоне (вне пожароопасной зоны действия нефтяного пятна). 3 з.п. ф-лы, 2 ил.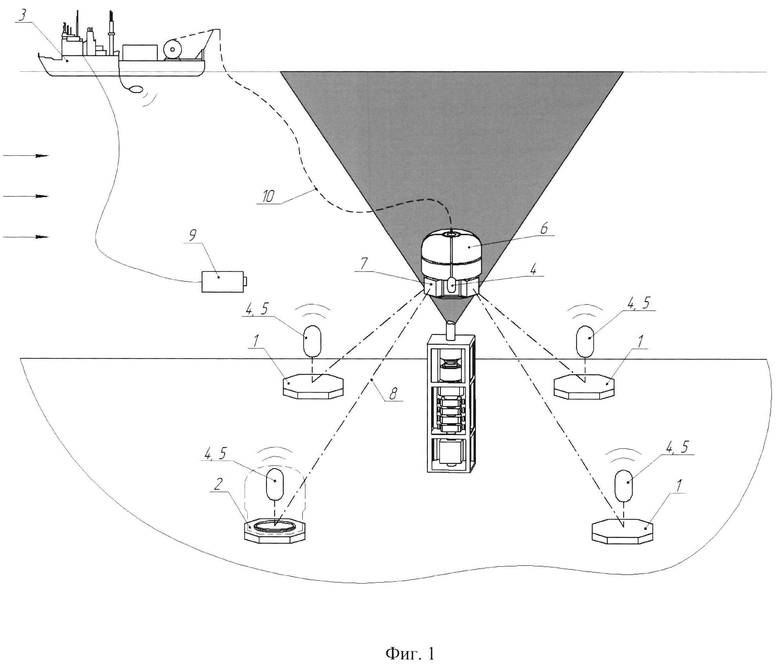
1. Система подводного позиционирования устройства типа «купол» для ликвидации подводных разливов нефти, основанная на принципе работы якорной системы позиционирования судов и включающая в себя якоря, электрические лебедки, отличающаяся тем, что систему используют для позиционирования подводного несамоходного устройства типа «купол», при этом устройство типа «купол» может устанавливаться в заданные координаты на больших глубинах с судна-носителя, находящегося вне пожароопасной зоны действия нефтяного пятна, а регулировку положения «купола» осуществляют дистанционно за счет изменения длин якорных связей при помощи электрических лебедок глубоководного исполнения, при этом процесс поддерживания оптимального рабочего положения «купола» сопровождается минимальными энергозатратами в автоматическом режиме по показаниям датчиков системы контроля среды и гидроакустических маяков-ответчиков.
2. Система подводного позиционирования устройства типа «купол» по п. 1, отличающаяся тем, что спуск специализированного устройства типа «купол» осуществляют вместе с закрепленным на нем якорем-балластом, отсоединение происходит на дне при помощи активации быстроразъемного устройства автоматически или средствами телеуправляемого необитаемого подводного аппарата (ТНПА).
3. Система подводного позиционирования устройства типа «купол» по п. 1, отличающаяся тем, что обследование подводной обстановки и выполнение подводных механических работ осуществляют средствами ТНПА, а управление системой осуществляют с пункта управления, расположенного на судне-носителе.
4. Система подводного позиционирования устройства типа «купол» по п. 1, отличающаяся тем, что определение действительного положения «купола» и зоны его оптимального рабочего положения осуществляют на основании данных, получаемых от телекамер ТНПА, датчиков системы контроля среды и гидроакустических маяков-ответчиков.
| US 4323118 A, 06.04.1982 | |||
| Способ сбора нефти и газа из подводной аварийно фонтанирующей скважины | 1979 |
|
SU943393A1 |
| WO 2012007389 A2, 19.01.2012 | |||
| RU 2012105771 A, 27.08.2013 | |||
| СИСТЕМА ДЛЯ СБОРА И ЛОКАЛИЗАЦИИ НЕФТИ В ВОДНОЙ СРЕДЕ | 2016 |
|
RU2634118C1 |
| СПОСОБ ПОСТАНОВКИ БУРОВОГО СУДНА С ТУРЕЛЬЮ НА ЯКОРНО-ШВАРТОВНУЮ СИСТЕМУ В ЛЕДОВЫХ УСЛОВИЯХ | 2018 |
|
RU2676927C1 |
| WO 9917982 A1, 15.04.1999. | |||

