Изобретение относится к вычислительной технике и может быть использовано в составе специализированных и робототизированных системах с техническим зрением для выделения объектов наблюдения, позволяющее повысить точность и быстродействие определения параметров движения.
Известна полезная модель, относящаяся к области измерений трехмерных координат различных перемещающихся объектов, не являющихся статическими (изменяющих свое положение и пространственную конфигурацию во времени), состоящая из двух цифровых видеокамер, электронных вычислительных средств, включающих подсистему построения трехмерных моделей, система содержит не менее чем одно управляемое по цифровому интерфейсу устройство синхронизации кадров от видеокамер на основе их содержания, расположенное в зоне обзора видеокамер, электронные вычислительные средства содержат синхронизирующее вычислительное устройство, содержит систему управления устройством синхронизации кадров и автоматическую систему технического зрения для распознавания состояния устройства синхронизации кадров на основе их содержания [Патент на полезную модель РФ №119095, кл. G01B 11/00. 2012].
Недостатком указанной модели является то, что для выделения перемещающегося в пространстве объекта изображения, поступающие с камер, при обработке на ЭВМ должны быть строго синхронизированы по времени, что накладывает серьезные ограничения на быстродействие системы.
Наиболее близким к предлагаемому является стереоскопическое устройство выделения динамических объектов [Патент РФ №2583708, кл. G06K 9/46, 10.05.2016 Бюл. №10], идентичные датчики изображения, аналого-цифровые преобразователи, блок выделения кадрового и строчных импульсов (БВКСИ) 5, элемент И 6, генератор тактовых импульсов 7, однокристальный микроконтроллер на архитектуре ARM (OMK-ARM) с USB - контроллером 8 с буферной памятью (БП) и видеоинтерфейсом (ВИ), мультиплексор 9. Выделение движущихся объектов сводится к получению пространственных параметров движущегося объекта, размеры и конфигурация которого изменяются в процессе измерения, расположенного на сложном пространственном фоне, для чего необходима последовательная обработка, требующая оценки сигнала на каждом такте с учетом информации, поступающей в процессе наблюдения. После корректировки осуществляется передача данных в ЭВМ через USB - контроллер.
Недостатком указанного изобретения является то, что данное устройство является стационарным и при изменении места положения требует калибровки.
Технической задачей устройства является создание подвижной стереоскопической системы определения параметров движения динамических объектов.
Поставленная задача решается посредством того, что в стереоскопическое устройство выделения движущихся объектов, содержащее два датчика изображения ДИ1 и ДИ2, два аналогово-цифровых преобразователя АЦП1 и АЦП2, блок выделения кадрового и строчного импульсов БВКСИ, элемент И, генератор, буферную память, однокристальный микроконтроллер на архитектуре ARM ОМК-ARM с USB -контроллером, мультиплексор, введены блок расчета перемещения по оси X (БРПХ), блок расчета перемещения по оси Y (БРПY), блок расчета перемещения по оси Z (БРПZ), причем выходы датчиков изображения подключены к информационным входам АЦП и ко входам БВКСИ, первый выход которого соединен с первым входом элемента И и входом VP_VSYNC OMK-ARM, а второй выход - со вторым входом элемента И и входом VP_HSYNC ОМК-ARM, выход которого соединен со входом синхронизации АЦП, выход генератора подключен к четвертому входу элемента И, чей третий вход соединен с выходом инициализации INIT ОМК-ARM, информационные выходы АЦП соединены через мультиплексор с информационными входами ОМК-ARM, а выходы готовности данных RDY АЦП - с управляющими входами VP_CLKIN1 и VP_CLKIN1 видеоинтерфейса ОМК-ARM, выход БРПХ подключен ко входу I2C1 ОМК-ARM, выход БРПY подключен ко входу I2C2 ОМК-ARM, выход БРПZ подключен ко входу I2C3 ОМК-ARM.
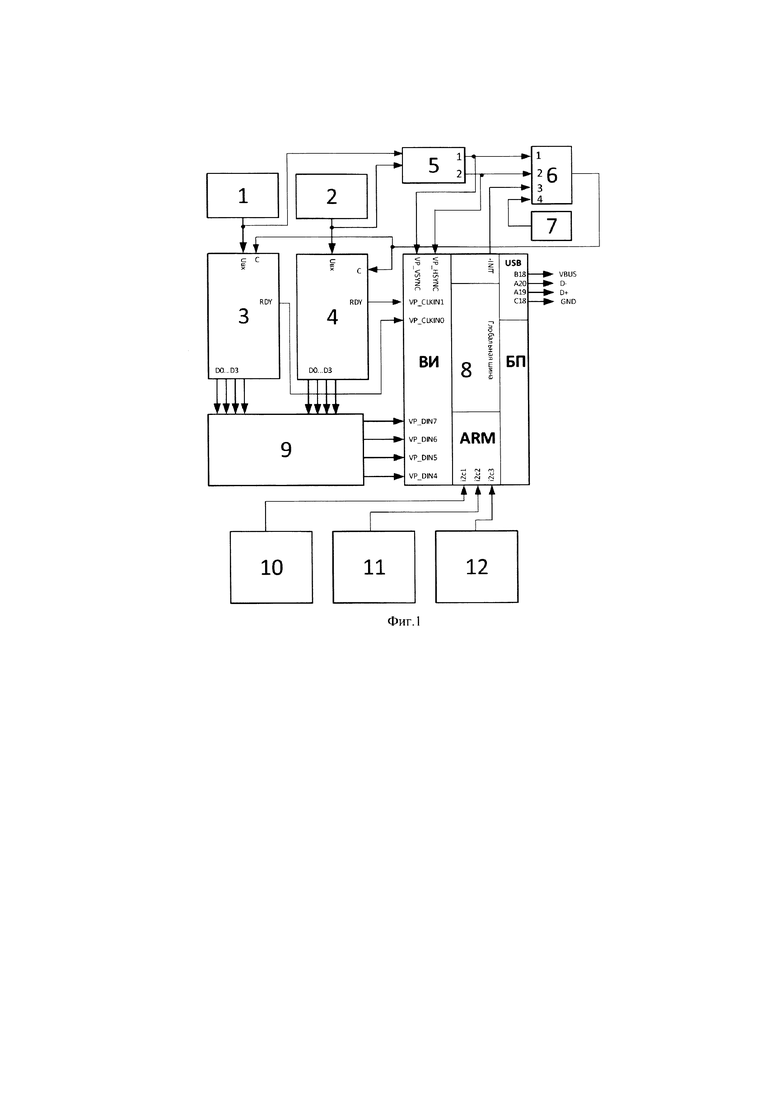
Сущность изобретения поясняется чертежами, где на фиг. 1 представлена структурная схема подвижного стереоскопического устройства выделения динамических объектов.
Подвижное стереоскопическое устройство выделения динамических объектов содержит два датчика изображения ДИ 1 и ДИ 2, АЦП 3 и АЦП 4, блок выделения кадрового и строчного импульсов (БВКСИ) 5, элемент И 6, генератор 7, однокристальный микроконтроллер на архитектуре ARM (OMK-ARM) с USB - контроллером 8, мультиплексор 9, блок расчета перемещения по оси X (БРПХ) 10, блок расчета перемещения по оси Y (БРПY) 11, блок расчета перемещения по оси Z (БPПZ) 12, причем выходы датчиков изображения 1 и 2 подключены к информационным входам АЦП 3 и АЦП 4 соответственно и ко входу БВКСИ 5, первый выход которого соединен с первым входом элемента И 6 и входом VP_VSYNC ОМК-ARM 8, а второй выход - со вторым входом элемента И 6 и входом VP_HSYNC ОМК-ARM 8, выход которого соединен со входами синхронизации АЦП 3 и 4, выход генератора 7 подключен к четвертому входу элемента И 6, чей третий вход соединен с выходом инициализации IMIT ОМК-ARM 8, информационные выходы АЦП 3 и 4 соединены через мультиплексор 9 с видеоинтерфейсом (ВИ) ОМК-ARM 8, а выход готовности данных RDY АЦП 3 и 4 - с управляющими входами VP_CLKIN1 и VP_CLKIN1 видеоинтерфейса ОМК-ARM 8 соответственно, выход блоков расчета перемещения по оси X, Y, Z БРПХ 10, БРПY 11, БРПZ 12 соединены с входами шины I2C1, I2C2, I2C3 ОМК-ARM 8 соответственно, a USB - контроллер подключается к соответствующим входам-выходам для связи с ПК.
Устройство работает следующим образом.
Видеосигнал от датчиков изображения ДИ 1 и ДИ 2 поступает на блок выделения кадрового и строчного импульсов 5 и аналого-цифровые преобразователи АЦП 3 и АЦП 4 соответственно. Как только блок выделения кадрового и строчного импульсов 5 выдает импульс начала кадра и импульс начала строки, на выходе элемента И 6 появятся синхронизирующие импульсы, формируемые генератором и поступающие на входы синхронизации аналого-цифровых преобразователей АЦП 3 и АЦП 4. АЦП преобразуют аналоговый видеосигнал в цифровой вид. Критерием оцифровки является получение 1280 элементов изображения на каждую видеостроку.
По каждому импульсу аналого-цифровые преобразователи 3,4 осуществляют преобразование входного аналогового сигнала, получаемого от датчиков изображения ДИ 1 и ДИ 2, в параллельный цифровой код, который передается с информационных выходов аналого-цифровых преобразователей АЦП 3 и АЦП 4 через мультиплексор 9 на входы видеоинтерфейса ОМК-ARM 8. Далее через глобальную шину ОМК-ARM 8 информационный код передается в буферную память. Как только в БП запишутся первые два кадра изображения, параллельно с записью следующих кадров в буферную память, ОМК-ARM 8 начнет выполнять алгоритм локализации динамических объектов, как только локализована первая область, ОМК-ARM осуществляет выделение объектов изображения, после выделения объекта запускает алгоритм идентификации и сопоставления. Как только идентичные точки, для которых находится параллакс, будут найдены, от блоков расчета перемещения БРПХ 10, БРПУ 11, ВРПZ 12 через шину I2C ОМК-ARM 8 получает координаты перемещения подвижного стереоскопического устройства, далее начнет работу алгоритм определения пространственных координат объекта изображения с учетом смещения устройства в пространстве. После завершения работы алгоритма результат передается в БП, далее из буферной памяти через глобальную шину ОМК-ARM и USB-контроллер передаются в ПК.
Этапы обработки ОМК-ARM включают:
- Локализация областей изображения.
- Идентификация динамического объекта.
- Определение пространственных координат динамических объектов.
- Коррекция координат с учетом перемещения устройства.
Таким образом, разработанное подвижное стереоскопическое устройство выделения динамических объектов осуществляет ввод полутонового изображения по двум каналам с разрешением 1280×720, выделяет движущиеся объекты, определяет их пространственные координаты и позволяет вести наблюдение за несколькими динамическими объектами одновременно в реальном масштабе времени с учетом собственного перемещения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕРЕОСКОПИЧЕСКОЕ УСТРОЙСТВО ВЫДЕЛЕНИЯ ДИНАМИЧЕСКИХ ОБЪЕКТОВ | 2014 |
|
RU2583708C2 |
| Мультиспектральное оптико-электронное устройство для автономной мобильной платформы экологического мониторинга | 2020 |
|
RU2739140C1 |
| УСТРОЙСТВО ВЫДЕЛЕНИЯ КОНТУРОВ ОБЪЕКТОВ НА ИЗОБРАЖЕНИИ | 2007 |
|
RU2362210C1 |
| УСТРОЙСТВО ВЫДЕЛЕНИЯ КОНТУРОВ ИЗОБРАЖЕНИЙ ОБЪЕКТОВ | 2000 |
|
RU2185659C1 |
| БИНОКУЛЯРНОЕ УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ ТРОМБОЗА ГЛУБОКИХ ВЕН ГОЛЕНИ | 2006 |
|
RU2305487C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КОНТУРОВ ОБЪЕКТОВ В ИЗОБРАЖЕНИИ | 2013 |
|
RU2541855C1 |
| СПОСОБ ДИАГНОСТИКИ ТРОМБОЗА ГЛУБОКИХ ВЕН ГОЛЕНИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2262883C2 |
| УСТРОЙСТВО И СПОСОБ ОТОБРАЖЕНИЯ ТЕЛЕВИЗИОННОЙ ВИДЕОИНФОРМАЦИИ НА ЭКРАНЕ КОМПЬЮТЕРНОГО МОНИТОРА | 2011 |
|
RU2464725C1 |
| Телевизионная камера и её "кольцевой" фотоприёмник для компьютерной системы панорамного наблюдения | 2019 |
|
RU2710777C1 |
| МНОГОКАНАЛЬНЫЙ ИЗМЕРИТЕЛЬ СОПРОТИВЛЕНИЯ ИЗОЛЯЦИИ | 2019 |
|
RU2709709C1 |
Изобретение относится к области подвижных автоматизированных систем видеонаблюдения. Техническим результатом является обеспечение возможности определения параметров движения динамических объектов при подвижности стереоскопического устройства. Подвижное стереоскопическое устройство выделения динамических объектов содержит два датчика изображения, два аналогово-цифровых преобразователя, блок выделения кадрового и строчного импульсов, элемент И, генератор, однокристальный микроконтроллер на архитектуре ARM с USB-контроллером, блоком памяти и видеоинтерфейсом, мультиплексор, блок расчета перемещения по оси X, блок расчета перемещения по оси Y, блок расчета перемещения по оси Z. Выделение движущихся объектов с подвижного устройства сводится к получению пространственных параметров движущегося объекта, размеры и конфигурация которого изменяются в процессе измерения, расположенного на сложном пространственном фоне, для чего необходима последовательная обработка, требующая оценки сигнала на каждом такте с учетом информации, поступающей в процессе наблюдения. 1 ил.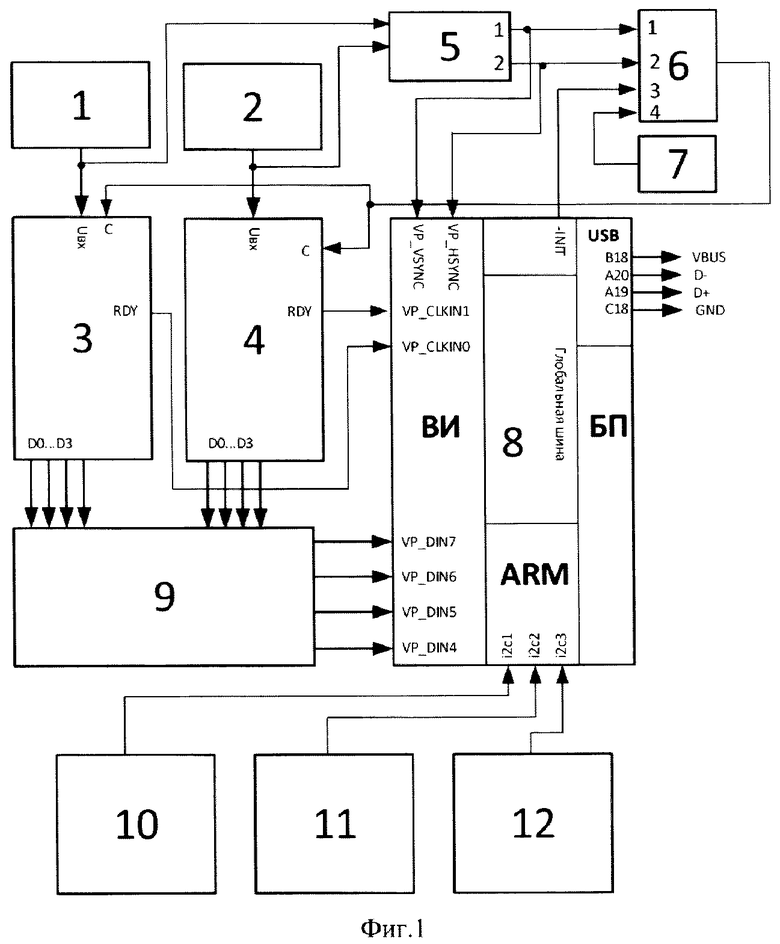
Подвижное стереоскопическое устройство выделения динамических объектов, содержащее два датчика изображения ДИ1 и ДИ2, два аналогово-цифровых преобразователя АЦП1 и АЦП2, блок выделения кадрового и строчного импульсов БВКСИ, элемент И, генератор, однокристальный микроконтроллер на архитектуре ARM ОМК-ARM с USB-контроллером, блоком памяти (БП) и видеоинтерфейсом (ВИ), мультиплексор, блок расчета перемещения по оси X (БРПХ), блок расчета перемещения по оси Y (БРПY), блок расчета перемещения по оси Z (ВРПZ), причем выходы датчиков изображения ДИ1 и ДИ2 подключены к информационным входам АЦП1 и АЦП2 соответственно и ко входу БВКСИ, первый выход которого соединен с первым входом элемента И и входом VP_VSYNC ОМК-ARM, а второй выход - со вторым входом элемента И и входом VP_HSYNC ОМК-ARM, выход которого соединен со входами синхронизации АЦП 1 и АЦП 2, выход генератора подключен к четвертому входу элемента И, чей третий вход соединен с выходом инициализации INIT ОМК-ARM, информационные выходы АЦП1 и АЦП2 соединены через мультиплексор с видеоинтерфейсом ВИ ОМК-ARM, а выход готовности данных RDY АЦП1 и АЦП2 - с управляющими входами VP_CLKIN1 и VP_CLKIN1 видеоинтерфейса ВИ ОМК-ARM соответственно, a USB-контроллер подключается к соответствующим входам-выходам для связи с ПК, отличающееся тем, что оно содержит блоки расчета перемещения (БРПХ), (БРПY), (БРПZ), выходы блоков расчета перемещения по оси X, Y, Z (БРПХ), (БРПY), (БРПZ) соединены с входами шины I2C1, I2C2, I2C3 ОМК-ARM соответственно.
| СТЕРЕОСКОПИЧЕСКОЕ УСТРОЙСТВО ВЫДЕЛЕНИЯ ДИНАМИЧЕСКИХ ОБЪЕКТОВ | 2014 |
|
RU2583708C2 |
| Устройство для удаления жира с кишок птицы и других животных | 1958 |
|
SU119095A1 |
| УСТРОЙСТВО ВЫДЕЛЕНИЯ КОНТУРОВ ИЗОБРАЖЕНИЙ ОБЪЕКТОВ | 2000 |
|
RU2185659C1 |
| EP 0405400A2, 02.01.1991. | |||

