Изобретение относится к вычислительной технике и может быть использовано в составе специализированных и роботизированных систем с техническим зрением для управления ими и для выделения объектов наблюдения, позволяющее повысить точность и быстродействие при формировании и уточнении исходного маршрута.
Известна полезная модель, относящаяся к области измерений трехмерных координат различных перемещающихся объектов, не являющихся статическими (изменяющих свое положение и пространственную конфигурацию во времени), состоящая из двух цифровых видеокамер, электронных вычислительных средств, включающих подсистему построения трехмерных моделей, система содержит не менее чем одно управляемое по цифровому интерфейсу устройство синхронизации кадров от видеокамер на основе их содержания, расположенное в зоне обзора видеокамер, электронные вычислительные средства содержат синхронизирующее вычислительное устройство, содержит систему управления устройством синхронизации кадров и автоматическую систему технического зрения для распознавания состояния устройства синхронизации кадров на основе их содержания [Патент на полезную модель РФ №119095, кл. G01B11/00. 2012].
Недостатком указанной модели является то, что для выделения перемещающегося в пространстве объекта изображения, поступающие с камер, при обработке на ЭВМ должны быть строго синхронизированы по времени, что накладывает серьезные ограничения на быстродействие системы.
Наиболее близким к предлагаемому является стереоскопическое устройство выделения динамических объектов [Патент РФ № 2583708, кл. G 06 K 9/46, 10.05.2016 Бюл. № 10], содержащее идентичные датчики изображения, аналого-цифровые преобразователи, блок выделения кадрового и строчных импульсов , элемент И , генератор тактовых импульсов , однокристальный микроконтроллер на архитектуре ARM (ОМК-ARM) с USB - контроллером с буферной памятью и видеоинтерфейсом, мультиплексор . Выделение движущихся объектов сводится к получению пространственных параметров движущегося объекта, размеры и конфигурация которого изменяются в процессе измерения, расположенного на сложном пространственном фоне, для чего необходима последовательная обработка, требующая оценки сигнала на каждом такте с учетом информации, поступающей в процессе наблюдения. После корректировки осуществляется передача данных в ЭВМ через USB - контроллер.
Недостатком указанного изобретения является то, что данное устройство является стационарным и при изменении места положения требует калибровки.
Технической задачей устройства является создание мультиспектрального оптико-электронного устройства для автономной мобильной платформы экологического мониторинга, позволяющего осуществлять управление платформой и выделять стационарные и динамические объекты в поле зрения мультиспектрального оптико-электронного устройства.
Поставленная задача решается посредством того, что мультиспектральное оптико-электронное устройство, размещенное на автономной мобильной платформе экологического мониторинга, содержащее мультиспектральный оптико-электронный датчик, оптико-электронный датчик, лидар, контроллер системы позиционирования, модуль фильтрации, модуль корректировки оценки дальности, модуль уточнения исходного маршрута, модуль формирования мультиспектрального изображения, модуль выделения объектов рабочей сцены, модуль расчета трехмерных координат, блок управления, блок оперативного запоминающего устройства, радиопередающий блок, блок контроллеров двигателей, причем выходы мультиспектрального оптико-электронного датчика и оптико-электронного датчика подключены к входам 1 и 2 модуля фильтрации соответственно, выход модуля фильтрации подключен к входу модуля формирования мультиспектрального изображения, первый выход модуля формирования мультиспектрального изображения соединен с входом модуля выделения объектов рабочей сцены, шина адреса и шина данных 2 модуля выделения объектов рабочей сцены соединена с шиной адреса и шиной данных 1 входа блока оперативного запоминающего устройства, порт ввода\вывода 2 входа блока оперативного запоминающего устройства соединен с портом ввода\вывода радиопередающего блока, выход модуля выделения объектов рабочей сцены подключен к первому входу модулю расчета трехмерных координат, выход модуля расчета трехмерных координат подключен ко второму входу модуля корректировки оценки дальности, выход лидара подключен к первому входу модуля корректировки оценки дальности, выход модуля корректировки оценки дальности подключен ко второму входу модуля уточнения исходного маршрута, выход контроллера системы позиционирования подключен к первому входу модуля уточнения исходного маршрута, выход модуля уточнения исходного маршрута подключен к входу блока управления, первый выход блока управления подключен ко второму входу модуля расчета трехмерных координат, второй выход блока управления подключен к входу блоку контроллеров двигателя.
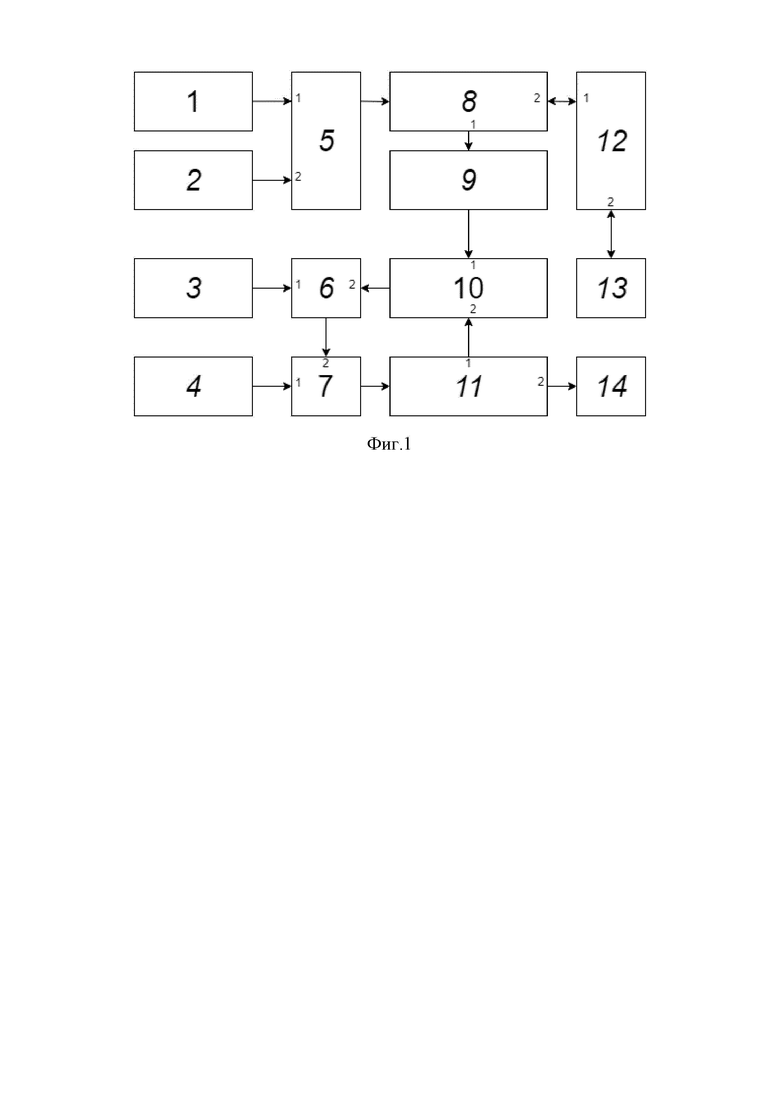
Сущность изобретения поясняется чертежом, где на фиг. 1 представлена структурная схема мультиспектрального оптико-электронного устройства для автономной мобильной платформы экологического мониторинга.
Мультиспектральное оптико-электронное устройство, размещенное на автономной мобильной платформе экологического мониторинга, содержащее мультиспектральный оптико-электронный датчик 1, оптико-электронный датчик 2, лидар 3, контроллер системы позиционирования 4, модуль фильтрации 5, модуль корректировки оценки дальности 6, модуль уточнения исходного маршрута 7 , модуль формирования мультиспектрального изображения 8, модуль выделения объектов рабочей сцены 9, модуль расчета трехмерных координат 10, блок управления 11, блок оперативного запоминающего устройства 12, радиопередающий блок 13, блок контроллеров двигателей 14, причем выходы причем выходы мультиспектрального оптико-электронного датчика 1 и оптико-электронного датчика 2 подключены к входам 1 и 2 модуля фильтрации 5 соответственно, выход модуля фильтрации 5 подключен к входу модуля формирования мультиспектрального изображения 8, первый выход модуля формирования мультиспектрального изображения 8 соединен с входом модуля выделения объектов рабочей сцены 9, шина адреса и шина данных 2 модуля выделения объектов рабочей сцены 8 соединена с шиной адреса и шиной данных 1 блока оперативного запоминающего устройства 12, порт ввода\вывода 2 блока оперативного запоминающего устройства 12 соединен с портом ввода\вывода радиопередающего блока 13, выход модуля выделения объектов рабочей сцены 9 подключен к первому входу модулю расчета трехмерных координат 10, выход модуля расчета трехмерных координат 10 подключен ко второму входу модуля корректировки оценки дальности 6, выход лидара 3 подключен к первому входу модуля корректировки оценки дальности 6, выход модуля корректировки оценки дальности 6 подключен ко второму входу модуля уточнения исходного маршрута 7, выход контроллера системы позиционирования 4 подключен к первому входу модуля уточнения исходного маршрута 7, выход модуля уточнения исходного маршрута 7 подключен к входу блока управления 11, первый выход блока управления 11 подключен ко второму входу модуля расчета трехмерных координат 10, второй выход блока управления 11 подключен к входу блоку контроллеров двигателя 14.
Устройство работает следующим образом.
Изображение от мультиспектрального оптико-электронное устройства в виде массива из пяти кадров, полученных в разных спектральных диапазонах (475нм, 560нм, 670нм, 720нм, 850нм) поступает на модуль фильтрации 5, где проходит процесс детекции и сглаживания систематических и случайных помех, далее массив изображений передается в модуль формирования мультиспектрального изображения 8, одновременно с этим, кадр изображения из оптико-электронного датчика 2 передается в модуль фильтрации 5 и обрабатывается, через радиопередающий блок 13 поступает команда инициализации устройства и исходный маршрут передвижения автономной мобильной платформы экологического мониторинга в виде последовательности точек представленной в формате градусы, минуты и секунды, от лидара 3 в модуль корректировки оценки дальности 6 поступает массив данных о расстоянии от мультиспектрального оптико-электронного устройства до объектов рабочей сцены с шагом горизонтального углового разрешения 0,05°, далее мультиспектральное изображение поступает в модуль выделения объектов рабочей сцены 9, где происходит выделение областей изображения, соответствующие объекты которые передаются в блок оперативного запоминающего устройства 12 и модуль расчета трехмерных координат 10, где происходит расчет геометрических центров выделенных объектов и их размеров. Результат вычислений в виде массива координат (x,y,z) n-го объекта передается в модуль корректировки оценки дальности 6, где они подвергаются процессу уточнения относительно данных полученных от лидара 3, что позволяет добиться повышения точности определения трехмерных координат и размеров объектов и передаются в модуль уточнения исходного маршрута 7. За счет обработки мультиспектрального изображения мультиспектрального оптико-электронного устройства позволяет выделять объекты, расположенные на плоскости движения, такие как углубления грунта, заполненные жидкостью, в модуле уточнения исходного маршрута 7 происходит расчет влияния выделенных объектов на заданный маршрут автономной мобильной платформы экологического мониторинга, если на пути следования был детектирован объект, маршрут перестраивается с учетом обхода препятствия и передается в блок управления 11, блок управления 11 формирует команды для блока контроллеров двигателей 14, данные полученные на текущем кадре сохраняются в блок оперативного запоминающего устройства 12. Для дальнейшего использования, данные полученные на предыдущем шаге подлежат удалению.
Таким образом, разработанное мультиспектральное оптико-электронное устройство для автономной мобильной платформы экологического мониторинга позволяет выделять объекты рабочей сцены с высокой точностью и повысить точность позиционирования автономной мобильной платформы экологического мониторинга для уточнения исходного маршрута.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ТРАНСПОРТНЫХ СРЕДСТВ С ЭЛЕКТРОПРИВОДОМ | 2022 |
|
RU2789153C1 |
| СПОСОБ ВЫВЕРКИ ПАРАЛЛЕЛЬНОСТИ ВИЗИРНЫХ ОСЕЙ МУЛЬТИСПЕКТРАЛЬНЫХ КОМПЛЕКСОВ | 2010 |
|
RU2443988C2 |
| Контактное устройство для измерения конфигурации и размеров объемного тела, система измерения конфигурации и размеров объемного тела, способ измерения конфигурации и размеров объемного тела | 2017 |
|
RU2663387C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЗИРОВАННОГО ПРИЦЕЛИВАНИЯ И ВЫСТРЕЛА ИЗ СТРЕЛКОВОГО ОРУЖИЯ (ЕГО ВАРИАНТЫ) | 2002 |
|
RU2240485C2 |
| СПОСОБ И СИСТЕМА НАВИГАЦИИ ПОДВИЖНОГО ОБЪЕКТА С ИСПОЛЬЗОВАНИЕМ ТРЕХМЕРНЫХ ДАТЧИКОВ | 2016 |
|
RU2658092C2 |
| АВИАЦИОННАЯ СИСТЕМА ОБРАБОТКИ ДАННЫХ АЭРОСЪЕМКИ ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНЫХ ЗОН И УПРАВЛЕНИЯ РЕЖИМАМИ РАБОТЫ ЦЕЛЕВЫХ НАГРУЗОК БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2024 |
|
RU2840814C1 |
| МУЛЬТИСПЕКТРАЛЬНАЯ СИСТЕМА И СПОСОБ ОПТИКО-ЭЛЕКТРОННОГО НАБЛЮДЕНИЯ ОХРАНЯЕМОЙ ТЕРРИТОРИИ | 2014 |
|
RU2563557C2 |
| Информационная обзорно-панорамная система наблюдения | 2020 |
|
RU2757061C1 |
| СПОСОБ ВЗАИМНОЙ КАЛИБРОВКИ ВИДЕОКАМЕРЫ И УСТРОЙСТВА ВЕЕРНОГО ЛАЗЕРНОГО ПОДСВЕТА | 2021 |
|
RU2788666C1 |
| Способ совмещения одновременно получаемых изображений от матричных фотоприёмников разного спектрального диапазона | 2019 |
|
RU2705423C1 |
Изобретение относится к вычислительной технике, а именно к области подвижных автоматизированных систем видеонаблюдения. Мультиспектральное оптико-электронное устройство, размещенное на автономной мобильной платформе экологического мониторинга, содержит мультиспектральный оптико-электронный датчик, оптико-электронный датчик, лидар, контроллер системы позиционирования, модуль фильтрации, модуль корректировки оценки дальности, модуль уточнения исходного маршрута, модуль формирования мультиспектрального изображения, модуль выделения объектов рабочей сцены, модуль расчета трехмерных координат, блок управления, блок оперативного запоминающего устройства, радиопередающий блок, блок контроллеров двигателей. Технический результат – повышение точности пространственной привязки автономной мобильной платформы экологического мониторинга, снижение временных затрат на формирование уточненного маршрута. 1 ил.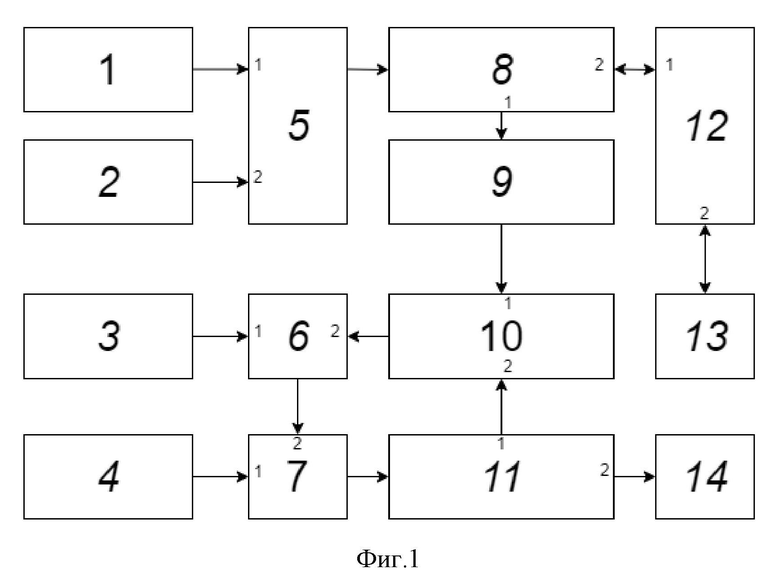
Мультиспектральное оптико-электронное устройство для автономной мобильной платформы экологического мониторинга, содержащее оптико-электронный датчик, модуль фильтрации, модуль выделения объектов рабочей сцены, блок управления, блок оперативного запоминающего устройства, радиопередающий блок, причем выход оптико-электронного датчика подключен к входам модуля фильтрации, который соединен с входом модуля выделения объектов рабочей сцены, шина адреса и шина данных модуля выделения объектов рабочей сцены соединена с шиной адреса и шиной данных блока оперативного запоминающего устройства, порт ввода/вывода блока оперативного запоминающего устройства соединен с портом ввода/вывода радиопередающего блока, отличающееся тем, что оно содержит мультиспектральный оптико-электронный датчик, лидар, контроллер системы позиционирования, модуль корректировки оценки дальности, модуль уточнения исходного маршрута, модуль формирования мультиспектрального изображения, модуль расчета трехмерных координат, причем выходы мультиспектрального оптико-электронного датчика и оптико-электронного датчика подключены к входам модуля фильтрации соответственно, выход модуля фильтрации подключен к входу модуля формирования мультиспектрального изображения, первый выход модуля формирования мультиспектрального изображения соединен с входом модуля выделения объектов рабочей сцены, шина адреса и шина данных второго модуля выделения объектов рабочей сцены соединена с шиной адреса и шиной данных первого входа блока оперативного запоминающего устройства, порт ввода\вывода второго входа блока оперативного запоминающего устройства соединен с портом ввода\вывода радиопередающего блока, выход модуля выделения объектов рабочей сцены подключен к первому входу модулю расчета трехмерных координат, выход модуля расчета трехмерных координат подключен ко второму входу модуля корректировки оценки дальности, выход лидара подключен к первому входу модуля корректировки оценки дальности, выход модуля корректировки оценки дальности подключен ко второму входу модуля уточнения исходного маршрута, выход контроллера системы позиционирования подключен к первому входу модуля уточнения исходного маршрута, выход модуля уточнения исходного маршрута подключен к входу блока управления, первый выход блока управления подключен ко второму входу модуля расчета трехмерных координат, второй выход блока управления подключен к входу блоку контроллеров двигателя.
| ЯЧЕЙКА ДЛЯ БЕСКОНТАКТНОЙ ЭЛЕКТРОМЕТРИИ | 0 |
|
SU258708A1 |
| МУЛЬТИСПЕКТРАЛЬНАЯ СИСТЕМА И СПОСОБ ОПТИКО-ЭЛЕКТРОННОГО НАБЛЮДЕНИЯ ОХРАНЯЕМОЙ ТЕРРИТОРИИ | 2014 |
|
RU2563557C2 |
| АВТОНОМНЫЙ ПОСТ ТЕХНИЧЕСКОГО НАБЛЮДЕНИЯ И СПОСОБ ЕГО ИСПОЛЬЗОВАНИЯ | 2018 |
|
RU2703167C1 |
| CN 102253394 A, 23.11.2011. | |||

