ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к направляющей системе для позиционирования пациента для получения медицинских изображений, установке медицинской визуализации, способу направления при позиционировании анатомической области исследования пациента, элементу компьютерной программы и машиночитаемому носителю.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
При медицинской визуализации, например, при рентгеновской визуализации или ультразвуковой визуализации, правильное позиционирование пациента до проведения медицинского обследования имеет важное значение для диагностического качества рентгенограммы, которое, следовательно, может требовать обстоятельного обучения и тренировок. Ошибка позиционирования является одной из главных причин, которые заставляют повторять обследования, что может привести не только к дополнительным расходам, но и, например, к дополнительному рентгеновскому облучению пациента. Например, в WO 2013/072814 A1 описано позиционирование источника рентгеновского излучения по отношению к пациенту.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В этом отношении может возникнуть необходимость в обеспечении улучшенного способа для облегчения позиционирования пациента для получения медицинских изображений.
Задача настоящего изобретения решается посредством объектов изобретения по независимым пунктам формулы изобретения, причем дополнительные варианты осуществления включены в зависимые пункты формулы изобретения. Следует отметить, что следующие описанные аспекты изобретения применяются также к направляющей системе для позиционирования пациента для получения медицинских изображений, к системе медицинской визуализации, к способу направления при позиционировании анатомической области исследования пациента, к элементу компьютерной программы и к машиночитаемому носителю.
В соответствии с первым аспектом настоящего изобретения обеспечена направляющая система для позиционирования пациента для получения медицинских изображений. Направляющая система включает в себя устройство обнаружения положения пациента и задающее положение пациента устройство. Устройство обнаружения пациента выполнено с возможностью обнаружения анатомической области исследования пациента для получения медицинских изображений и обнаружения текущей пространственной информации упомянутой анатомической области исследования. Задающее положение пациента устройство выполнено с возможностью выдачи первоначального целевого положения, являющегося виртуальной сценой виртуального пациента в правильном положении, для обнаруженной анатомической области исследования во время получения изображений и совмещения (т.е. адаптации) подмножества первоначального целевого положения с текущей пространственной информацией об анатомической области исследования в такой мере, что упомянутое подмножество клинически нерелевантно для получения медицинских изображений, тем самым обеспечивая адаптированное целевое положение. Предпочтительно, что в такой мере получение медицинских изображений позволяет выполнимым образом, т.е. без ущерба для клинических данных, адаптировать (или совместить) первоначальное целевое положение (например, виртуальную сцену виртуального пациента в правильном положении) к текущей пространственной информации (например, положению, позе и размеру) анатомической области исследования. Другими словами, аспекты первоначального целевого положения, которые не имеют значения для успешного получения медицинских изображений, совмещаются с пациентом (т.е. адаптируются к нему), а более конкретно с текущей пространственной информацией об анатомической области исследования, в то время как аспекты, которые существенны для успешного получения медицинских изображений, сохраняются (т.е. остаются неизменными). Результатом такого частичного совмещения является адаптированное целевое положение. При этом, аспекты, имеющие значение для успешного получения медицинских изображений, могут быть вообще получены из доступных источников, таких как «Positioning in Radiography» Swallow, Naylor, Roebuck и Whitley, Butterworth Heinemann, Oxford, 11-е издание, 1986. Таким образом, направляющая система в соответствии с настоящим изобретением позволяет пациенту и рентгенологу сфокусироваться на позиционировании важных аспектов позы для получения изображений, например, регулируя предплечье и пальцы для получения изображений большого пальца в боковой проекции, без необходимости регулировки не имеющих значения аспектов позы, таких как параллельное перемещение руки или повторное позиционирование плеча в случае получения изображений большого пальца в боковой проекции. Это может сэкономить время подготовки, например, для рентгеновского обследования, а также означает повышенный комфорт для пациентов и сотрудников. Кроме того, адаптация первоначального целевого положения к размеру анатомической области исследования делает возможной лучшую подгонку формы анатомической области исследования, что может сделать более легким и более точным выставление пациента с адаптированным целевым положением.
Первоначальное целевое положение может быть основано на лучших практических моделях поз пациента, например, как описано в вышеупомянутом источнике.
Термин «устройство обнаружения пациента» относится к устройству, способному анализировать в реальном мире объект (например, пациента или анатомическую область исследования пациента) или окружающую среду (например, процедурную комнату) для сбора данных об его форме (например, контура наружной поверхности пациента) и, возможно, его внешнем виде (например, цвете). Для некоторых применений устройством обнаружения пациента может быть камера, такая как 3D-сканер, для определения контура наружной поверхности пациента, а также информации о глубине. Для других приложений, внутренняя анатомия пациента (например, костей) может определяться в фазе формирования предварительного снимка при получении рентгеновского изображения. В этом случае устройство получения рентгеновских изображений (включающее в себя источник рентгеновского излучения и детектор рентгеновского излучения) можно называть устройством обнаружения пациента.
Термином «текущая пространственная информация» может также называться текущее пространственное расположение или текущее пространственное положение.
Термином «первоначальное целевое положение» может также называться первоначальное целевое расположение; а термином «адаптированное целевое положение» может также называться смоделированное или адаптированное целевое расположение или смоделированное целевое положение.
Термины «клинически нерелевантное подмножество первоначального целевого положения» или «клинически нерелевантное подмножество» относятся к подмножеству первоначального целевого положения, которое является нерелевантным для успешного получения медицинских изображений. Другими словами, регулировка такого клинически нерелевантного подмножества первоначального целевого положения не повлияет (или по меньшей мере минимально повлияет) на клинические данные исследования медицинских изображений. Следует отметить, что клинически нерелевантное подмножество может в значительной степени определяться имеющимся типом исследования. Например, положение плеча (и, таким образом, его положение в пространстве, поза и/или размер) можно рассматривать как клинически нерелевантное подмножество первоначального целевого положения для получения медицинских изображений большого пальца в боковой проекции.
В дальнейшем «клинически нерелевантные аспекты первоначального целевого положения» называются просто «нерелевантными аспектами». Кроме того, «клинически релевантные аспекты первоначального целевого положения» называются просто «релевантными аспектами».
В одном из примеров направляющей системы в соответствии с настоящим изобретением задающее положение пациента устройство выполнено с возможностью генерации данных изображения адаптированного целевого положения; и содержит устройство отображения, выполненное с возможностью отображения сгенерированных данных изображения адаптированного целевого положения посредством наложения на анатомическую область исследования. Таким образом, информация, используемая при визуальном наведении, отображается для пользователя (например, рентгенолога) с целью выставления анатомической области исследования с адаптированным целевым положением.
В другом примере направляющей системы в соответствии с настоящим изобретением адаптированное целевое положение включает в себя информацию дополненной реальности, причем указанная информация дополненной реальности включает в себя трехмерную виртуальную модель обнаруженной анатомической области исследования. Предпочтительно, чтобы трехмерная виртуальная модель могла предоставить рентгенологу интуитивное наведение для правильного позиционирования анатомической области исследования относительно адаптированного целевого положения. Термин «информация дополненной реальности» относится к генерируемой компьютером информации, такой как звук, видео, графика и т.д., которая дополняет настоящий непосредственный или косвенный вид реальной среды (например, анатомической области исследования). Например, для управления позиционированием пациента, информация дополненной реальности может содержать трехмерную виртуальную модель, представляющую адаптированное целевое положение, и может указать на отклонение между актуальной пространственной информацией об анатомической области исследования и адаптированным целевым положением, причем эта информация может отображаться, например, как «10° от цели, 20 см от цели». Есть несколько способов создания трехмерной виртуальной модели. В одном из примеров, трехмерная виртуальная модель реализуется с помощью компьютерного анимационного фильма. В еще одном примере правильно расположенная анатомическая область исследования анализируется и данные о ее форме собираются для моделирования с помощью 3D сканера поверхностей. Так как анатомия может также относиться к внутренней анатомии, трехмерная виртуальная модель может включать в себя модель внутренней анатомии пациента, например, костей.
В другом примере направляющей системы в соответствии с настоящим изобретением текущая пространственная информация включает в себя текущее положение, текущую позу и/или текущий размер. Предпочтительно, чтобы это предоставляло информацию о позиционировании для того, чтобы лучше представить пациентов с различными формами, например, высоких или маленьких пациентов, крупных или худых пациентов. Кроме того, выставление пациента с адаптированным целевым положением может быть легким и более точно достижимым, если адаптированное целевое положение и анатомия соответствуют в отношении положения, позы, а также размера.
В другом примере направляющей системы в соответствии с настоящим изобретением устройство отображения выполнено с возможностью отображения адаптированного целевого положения частично непрозрачным. Это приводит к тому, что ощутимо относительное положение по глубине между адаптированным целевым положением и анатомической областью исследования.
Данные изображения адаптированного целевого положения можно регулировать для того, чтобы сделать частично непрозрачными, что позволяет визуализировать (по отношению к глубине) расхождения между адаптированным целевым положением и анатомической областью исследования. Поэтому такая прорисовка может обеспечить более точное визуальное наведение для позиционирования, чем прозрачная дополненная реальность.
В другом примере направляющей системы в соответствии с настоящим изобретением устройство отображения является носимым на голове дисплеем, с помощью которого пользователь может просматривать анатомическую область исследования, причем адаптированное целевое положение обеспечивается посредством наложения на анатомическую область исследования, просматриваемую через носимый на голове дисплей.
Предпочтительно, что никакой калибровки глаз-дисплей не требуется, что позволяет пользователю напрямую (визуально) проникать в дополненную окружающую среду, обеспечивая непосредственное трехмерное взаимодействие. Кроме того, камера или вычислительное устройство могут быть встроены в носимый на голове дисплей, не требуется никакого дополнительного оборудования, например, в процедурной комнате.
Носимый на голове дисплей, также называемый оптически прозрачным носимым на голове дисплеем или устанавливаемым на голове дисплеем (HMD), может быть полупрозрачным дисплеем (монокулярным HMD) или двумя полупрозрачными дисплеями для обоих глаз (бинокулярный HMD). Примерами могут служить такие продукты, как Epson Moverio BT 200, Google glass, Vuzix или Meta spac glasses.
В другом примере направляющей системы в соответствии с настоящим изобретением устройство отображения является монитором, причем устройство обнаружения пациента выполнено с обеспечением возможности визуального представления анатомической области исследования, и причем адаптированное целевое положение обеспечено посредством наложения на указанное визуальное представление.
Монитор может дать преимущество быть видным любому человеку в комнате, а также пациенту. Таким образом, пациент может регулировать позу в соответствии с наведением по дополненной реальности на экране монитора, таким образом, сокращая время подготовки, например, получения данных рентгеновского изображения. Также может быть предусмотрен монитор, чтобы показать другой вид анатомической области исследования в дополнение к носимому на голове дисплею.
В соответствии со вторым аспектом настоящего изобретения предлагается установка медицинской визуализации. Выше описана установка медицинской визуализации, содержащая направляющую систему в соответствии с одним из примеров. Установка медицинской визуализации дополнительно содержит систему получения изображений, содержащую источник для медицинской визуализации и детектор для медицинской визуализации. В данном случае источник для медицинской визуализации выполнен с возможностью выдавать визуализирующее поле, обнаруживаемое детектором для медицинской визуализации.
Предпочтительно, что оператор визуально направляется, как точно расположить пациента. Это можно использовать для того, чтобы оказать помощь менее обученным операторам в правильном позиционировании пациента перед получением рентгеновского изображения, а также обучении и подготовке к другим методам визуализации, таким как УЗИ, МРТ (магнитно-резонансная томография), КТ (компьютерная томография) и другим. Кроме того, это может обеспечить лучшее содействие системе медицинской визуализации в позиционировании пациента и планировании радиационного облучения для рентгеновского обследования.
В одном из примеров установки медицинской визуализации в соответствии с настоящим изобретением установка медицинской визуализации содержит по меньшей мере одно из группы: установка рентгеновской визуализации и установка ультразвуковой визуализации. Здесь система рентгеновской визуализации, может быть выбрана из группы: сканер КТ, сканер с рамой С-типа, сканер для маммографиии, сканер томографической реконструкции, диагностический рентгеновский сканер и доклинический сканер изображений. Для рентгеновской визуализации источник и детектор для медицинской визуализации относятся к источнику рентгеновского излучения и детектору рентгеновского излучения, соответственно. Для ультразвуковой визуализации источник и детектор для медицинской визуализации могут относиться к ультразвуковому преобразователю, который как передает, так и принимает ультразвуковые сигналы. Термин «визуализирующее поле» относится, например, к полю рентгеновского излучения при рентгеновской визуализации, ультразвуковому полю при ультразвуковой визуализации, магнитному полю при МРТ и т.д.
В одном из примеров установки медицинской визуализации в соответствии с настоящим изобретением установка медицинской визуализации дополнительно выполнена с возможностью выдачи и отображения графического представления целевого источника, содержащего информацию дополненной реальности, указывающую целевое положение источника для медицинской визуализации, для получения изображений и/или графическое представление детектора цели, содержащее информацию дополненной реальности, указывающую целевое положение детектора для медицинской визуализации, для получения изображений. Предпочтительно, чтобы информация дополненной реальности могла обеспечить подсказки для выставления источника для медицинской визуализации и детектора для медицинской визуализации. Например, это может включать в себя подсказки об отклонении текущей пространственной информации об источнике рентгеновского излучения от целевого положения, которые могут отображаться как «10° от цели, 20 см от цели». Эта информация также может быть предоставлена как звук, например, голосовой командой.
В соответствии с третьим аспектом настоящего изобретения предлагается способ направления позиционирования анатомической области исследования пациента. Способ включает в себя следующие этапы:
a) обнаружение анатомической области исследования пациента для получения изображений;
b) обнаружение текущей пространственной информации об обнаруженной анатомической области исследования;
c) выдача первоначального целевого положения, являющегося виртуальной сценой виртуального пациента в правильном положении, для обнаруженной анатомической области исследования во время получения медицинских изображений;
d) совмещение (т.е. адаптация) подмножества первоначального целевого положения с упомянутой текущей пространственной информацией об анатомической области исследования до такой степени, что упомянутое подмножество клинически нерелевантно для получения медицинских изображений;
e) определение адаптированного целевого положения на основе упомянутого совмещения.
В одном из примеров способа в соответствии с настоящим изобретением способ дополнительно содержит следующие этапы:
f) генерирование данных изображения адаптированного целевого положения; и
g) отображение сгенерированных данных изображения адаптированного целевого положения посредством наложения на анатомическую область исследования в качестве графической информации о позиционировании для выставления анатомической области исследования для получения изображения.
В соответствии с примером способ дополнительно содержит:
h) выдачу и отображение графического представления целевого источника, содержащего информацию дополненной реальности, указывающую целевое положение источника для медицинской визуализации, для получения изображений и/или графического представления детектора цели, содержащего информацию дополненной реальности, указывающую целевое положение детектора для медицинской визуализации, для получения данных.
В соответствии с четвертым аспектом настоящего изобретения для управления устройством предлагается элемент компьютерной программы, который, будучи исполняемым блоком обработки, выполнен с возможностью осуществлять этапы способа.
В соответствии с пятым аспектом настоящего изобретения предлагается машиночитаемый носитель, содержащий сохраненный на нем элемент программы, который обсуждался ранее.
В соответствии с одним из аспектов настоящего изобретения, предлагается система дополненной реальности для того, чтобы оказать помощь при позиционировании пациента, например, для рентгенографического сбора данных. Лучшие практические модели поз пациента совмещаются с текущей пространственной информацией, такой как положение, поза и размер пациента для того, чтобы выдать адаптированное положение для визуального наведения оператору, как точно позиционировать пациента. Например, путем измерения толщины пациента модель позы может быть адаптирована к позе, положению и/или размеру пациента, в такой мере как это относится к клинически нерелевантным подмножествам и/или аспектам модели позы. Кроме того, частично непроницаемое (полупрозрачное) перекрытие или наложение адаптированных лучших практических моделей поз пациента на пациента делает возможным лучшее восприятие глубины. Система дополненной реальности также может быть выполнена с возможностью оказания помощи при позиционировании, например, источника рентгеновского излучения и/или детектора при рентгенографическом сборе данных. Это можно использовать для того, чтобы помочь рентгенологу при рентгеновской диагностике правильно расположить пациента. Если нет ни одного рентгенолога (например, в некоторых сельских районах), система дополненной реальности может помочь неподготовленному лицу правильно расположить пациента. Она также применима при подготовке рентгенологов или другого персонала располагать пациентов, а также для обучения другим методам, таким как ультразвуковой, МРТ, КТ, и т.д.
Эти и другие аспекты настоящего изобретения станут очевидны и пояснены со ссылкой на описанные ниже варианты осуществления.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Примерные варианты осуществления изобретения будут описаны ниже со ссылкой на следующие чертежи:
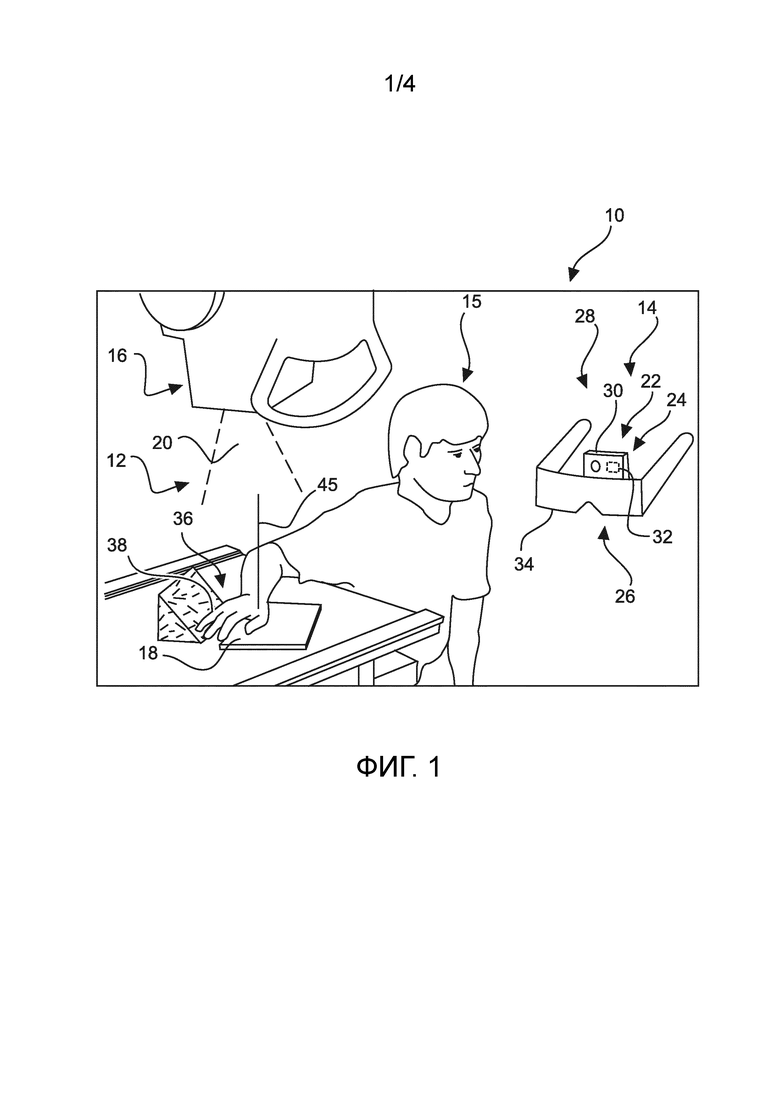
На Фиг. 1 показано схематическое изображение примера установки медицинской визуализации.
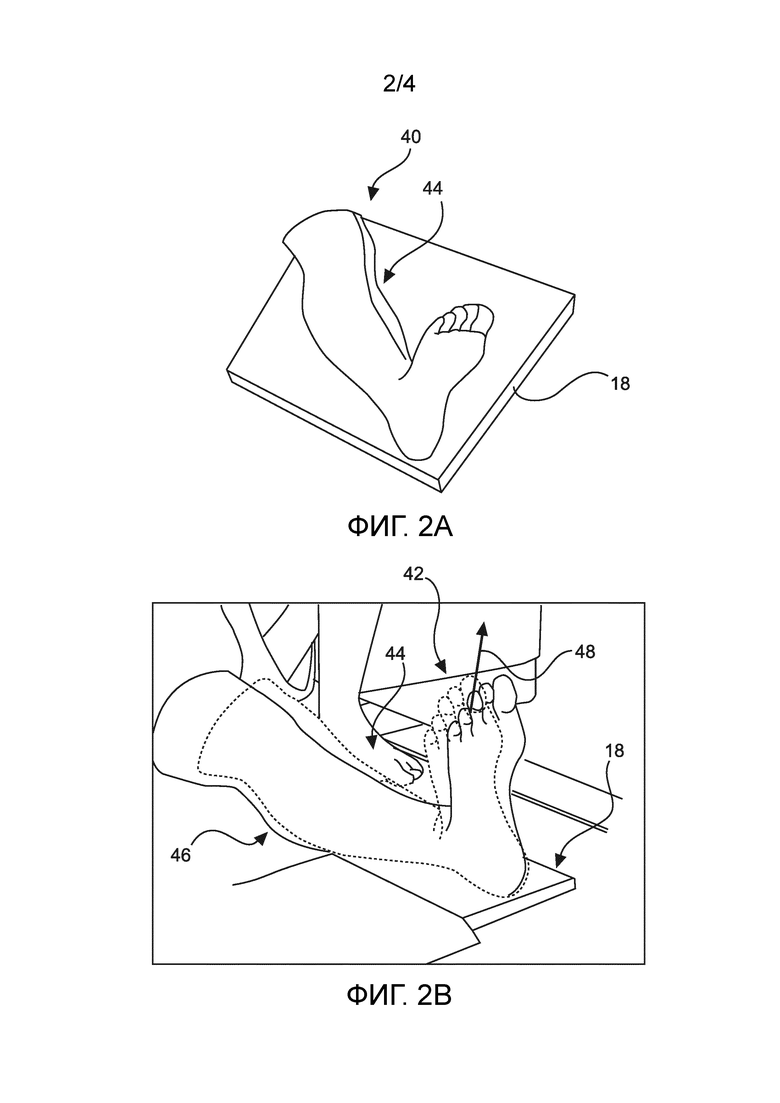
На Фиг. 2A показан пример первоначального целевого положения.
На Фиг. 2B показан пример адаптированного целевого положения, показанного на Фиг. 2A.
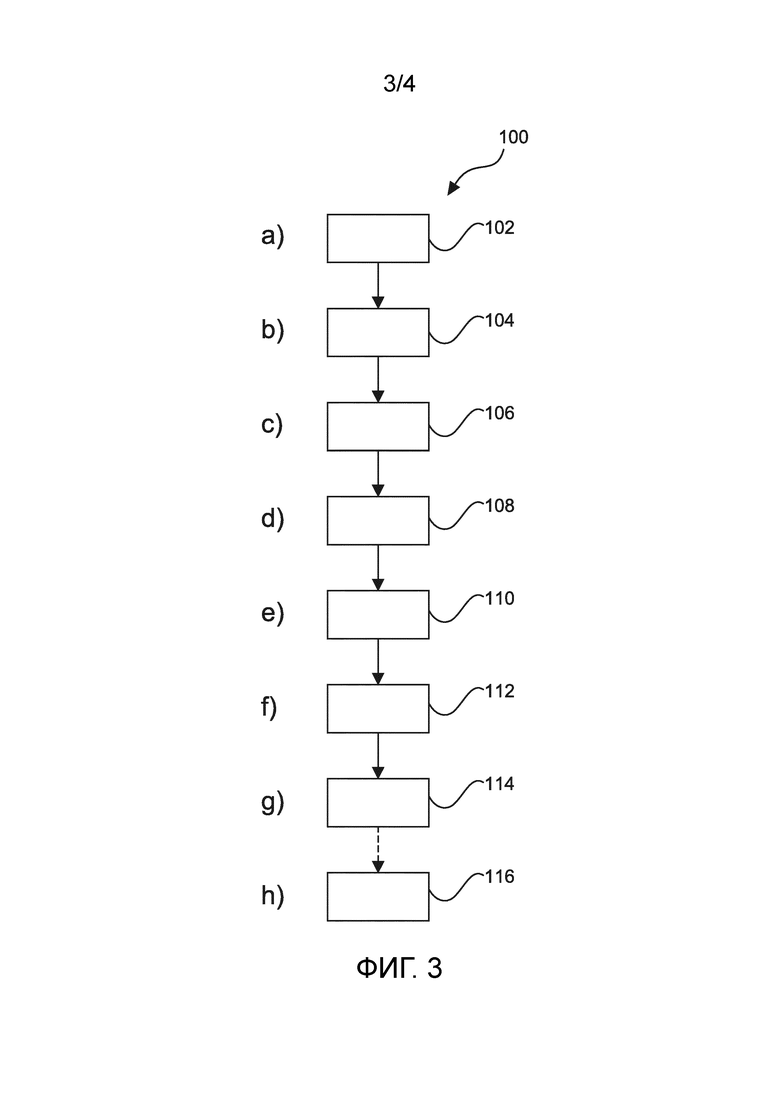
На Фиг. 3 показаны основные этапы примера способа направления при позиционировании анатомической области исследования пациента.
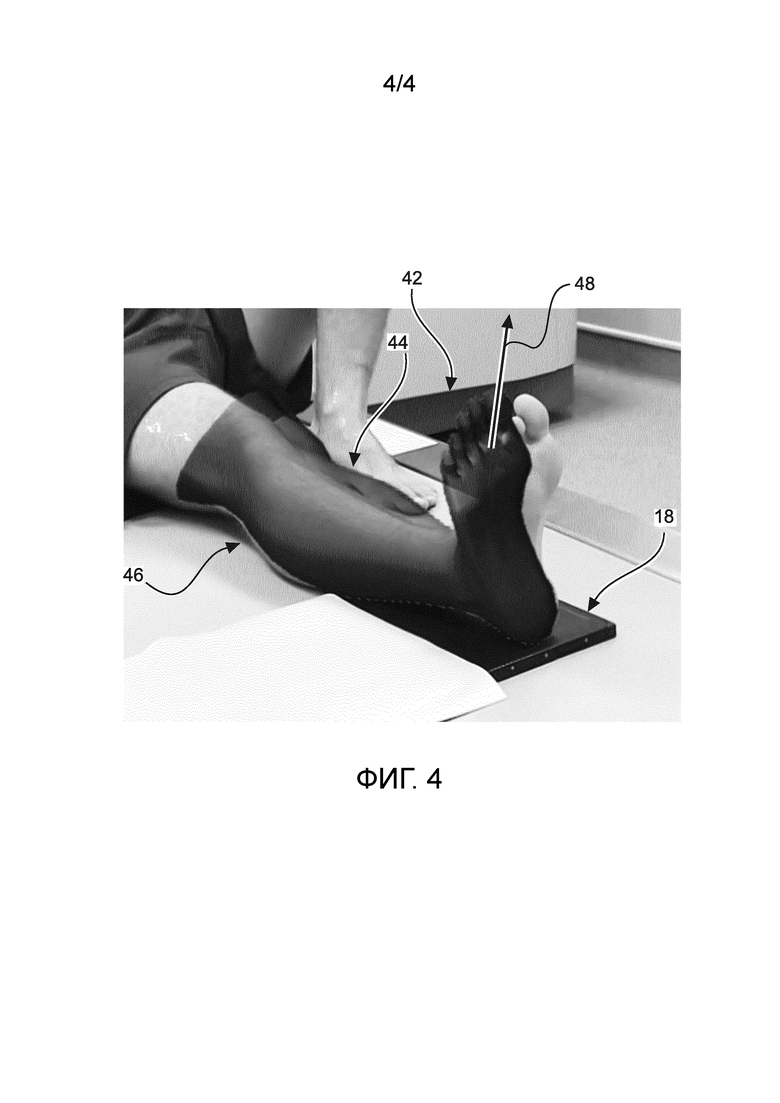
На Фиг. 4 показано фотографическое изображение примера, показанного на Фиг. 2B.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
На Фиг. 1 показан пример установки 10 медицинской визуализации, например, установки рентгеновской визуализации, как показано на Фиг. 1, или установки ультразвуковой визуализации (далее не показана).
Следует также отметить, что, хотя последующее обсуждение относится к системе рентгеновской визуализации, т.е. примеру установки 10 медицинской визуализации, этот принцип также применим к другим методам визуализации, например, ультразвуковой, МРТ, КТ, и т.д. Однако для простоты, направление в других методах медицинской визуализации далее не обсуждается.
Установка 10 медицинской визуализации содержит систему 12 получения изображений (например, рентгеновскую систему сбора данных с Фиг. 1) и направляющую систему 14 для позиционирования пациента 15 для получения медицинских изображений, например, получения рентгеновских или ультразвуковых изображений.
Медицинская система 12 сбора данных включает в себя источник 16 для медицинской визуализации (например, источник рентгеновского излучения, как показано на Фиг. 1) и детектор 18 для медицинской визуализации (например, детектор рентгеновского излучения, как показано на Фиг. 1). Источник 16 для медицинской визуализации выполнен с возможностью выдавать визуализирующее поле 20 (например, поля рентгеновского излучения, как показано на Фиг. 1), обнаруживаемое детектором 18 для медицинской визуализации.
Направляющая система 14 содержит устройство 22 обнаружения пациента и устройство 24 для определения положения пациента.
Устройство 22 обнаружения пациента может обнаруживать контур наружной поверхности пациента. Например, устройство 22 обнаружения пациента может быть камерой глубины, инфракрасной камерой, ультразвуковым датчиком и т.д. Устройство 22 обнаружения пациента может также обнаруживать внутреннюю анатомическую область исследования, такую как кости или целевой орган. Например, устройство 22 обнаружения пациента может быть устройством получения рентгеновских изображений, которое получает изображение внутренней анатомической области исследования путем генерации рентгеновского предварительного снимка.
Устройство 24 определения положения может быть связано с вычислительным устройством, например, встроенным вычислительным блоком, процессором или настольным компьютером.
Можно предложить необязательное устройство 26 отображения, которое может относиться к любым подходящим дисплеям для визуализации информации. Примеры включают в себя мониторы, портативные устройства и HMD (носимый на голове дисплей).
Устройство 22 обнаружения пациента, устройство 24 определения положения и устройство 26 отображения могут быть соединены любыми подходящими способами, включающими в себя беспроводную связь (например, Bluetooth или WLAN (беспроводную локальную вычислительную сеть)) или проводную связь (например, при помощи кабелей).
Например, направляющая система 14 на Фиг. 1 предлагается в качестве носимой на голове направляющей системы 28, которая, например, несет встроенную камеру 30 в качестве примера устройства 22 обнаружения пациента, встроенное вычислительное устройство 32 (не показано детально) в качестве примера задающего положение пациента устройства 24 и носимый на голове дисплей 34 в качестве примера устройства 26 отображения.
В еще одном примере (далее не показан) носимая на голове направляющая система 28 содержит встроенную камеру 30 и носимый на голове дисплей 34, а задающее положение пациента устройство 20 предусмотрено в виде высокопроизводительного настольного компьютера, связанного со встроенной камерой 30 и носимым на голове дисплеем 34, например, через WLAN. Таким образом, носимая на голове направляющая система 28 может обеспечить прямое представление объемов без ущерба для скорости частоты кадров за счет аппаратной поддержки высокопроизводительного настольного компьютера.
Устройство 22 обнаружения пациента выполнено с возможностью обнаружения анатомической области 36 исследования, такой как рука 38, пациента 15 для получения изображений, и обнаружения текущей пространственной информации (например, положения, позы или размера) об анатомической области 36 исследования.
Задающее положение пациента устройство 24 выполнено с возможностью выдавать первоначальное целевое положение 40 (смотри пример на Фиг. 2А) для обнаруженной анатомической области 36 исследования. Первоначальное целевое положение 40 предусмотрено в качестве опорного для получения медицинских изображений. Задающее положение пациента устройство 24 дополнительно выполнено с возможностью совмещения подмножества первоначального целевого положения 40 с текущей пространственной информацией об анатомической области исследования в такой мере, что упомянутое подмножество клинически нерелевантно для получения медицинских изображений, тем самым предоставляя адаптированное целевое положение 42 (смотри пример в Фиг. 2B).
Первоначальное целевое положение 40 также можно называть опорным положением, которое относится к виртуальной сцене виртуального пациента в правильном положении или подходящей позе. Есть несколько способов для создания виртуального пациента в подходящих позах (т.е. создания первоначального целевого положения или опорного положения). В одном из примеров пациент моделируется в трехмерном пространстве, как это делается в компьютерных анимационных фильмах. Другой пример относится к записи правильно расположенного пациента (или модели) камерой (например, камерой трехмерной поверхности). Первоначальное целевое положение 40 внутренней анатомической области исследования, такой как опухоль, может быть реализовано путем использования ранее записанных данных, например, от планового КТ-сканирования.
В одном из примеров первоначальное целевое положение 40 связано с заданным типом исследования. Во время процедуры позиционирования заданный тип исследования выбирается из i) списка в базе данных, который включает в себя множество видов исследования, ii) электронной системы планирования и/или iii) множества меток, где каждая метка связана с соответствующим заданным типом исследования.
Другими словами, пользователь (например, рентгенолог) может записывать сцены как первоначальных целевых положений, так и добавлять их в базу данных, когда пациент находится в правильном положении. База данных может включать в себя множество анатомических структур пациента, включающих в себя внешнюю анатомию (например, ноги или руки) или внутреннюю анатомию (например, кости). База данных может дополнительно содержать множество виртуальных пациентов разного пола, веса, роста, возраста и т.д. Повторяя моделирование или записывая для каждой предполагаемой ситуации визуализации можно заполнить базу данных виртуальных сцен.
Во время процедуры позиционирования пользователь (например, рентгенолог) может выбрать планируемый тип обследования из списка, например, «голеностоп, подтаранный сустав, справа, наклонно-латерально». Тип исследования может также прийти автоматически от планировщика или электронной системы планирования, которая объединяет в одно целое рабочий процесс рентгенологического исследования. Виртуальная сцена с виртуальным пациентом может быть извлечена из базы данных и отображаться, например, носимым на голове дисплеем. Альтернативно, могут присутствовать различные метки (маркеры) для различных типов исследования. Каждой метке прилагается своя виртуальная сцена, которая соответствует типу исследования. Это означает, что вместо того, чтобы взаимодействовать с компьютером (например, выбирая запланированный тип исследования из списка), рентгенолог может использовать физические объекты, например, метки для того, чтобы выбрать нужный тип исследования.
Адаптированное целевое положение 42 можно называть смоделированным целевым положением. Так как это может быть положением реально наблюдаемым наблюдателем при совмещении, адаптированное целевое положение 42 также можно также называть наблюдаемым положением. Таким образом, задающее положение пациента устройство 24 выполнено с возможностью приведения целевого положения из опорного положения (т.е. первоначального целевого положения 40) в наблюдаемое положение (т.е. адаптированное целевое положение 42), и наблюдаемое положение лучше соответствует текущей пространственной информации.
Совмещение может быть выполнено путем анализа анатомической области исследования 36 и оценки положений определенных ориентиров, например суставов тела. Эти ориентиры могут совмещаться с соответствующими ориентирами на графическом представлении целевой анатомии.
Альтернативно, совмещение может быть осуществлено путем закрепления меток или маркеров в определенных местоположениях анатомической области исследования или пациента. Эти метки или маркеры можно отслеживать, например, с помощью камеры. Когда метка или маркер перемещается (т.е. поза анатомии изменяется), виртуальный пациент также приводится в соответствие с движением метки или маркера.
Необязательно, задающее положение пациента устройство 24 дополнительно выполнено с возможностью генерации данных изображения адаптированного целевого положения 42.
Необязательное устройство 26 отображения выполнено с возможностью отображения данных изображения адаптированного целевого положения 42 посредством наложения на анатомическую область 36 исследования в качестве графической информации о позиционировании для выставления анатомической области 36 исследования для получения изображения.
Данные изображения адаптированного целевого положения 40 можно визуализировать несколькими способами. В одном из примеров адаптированное целевое положение (например, трехмерная виртуальная модель) отображается с непрозрачным каркасном (или контуром, или очертанием) вокруг него. В еще одном примере адаптированное целевое положение является моделью с непрозрачными поверхностями.
В одном из примеров устройство отображения 26 является носимым на голове дисплеем 34 (как показано на Фиг. 1), с помощью которого пользователь может просматривать анатомическую область 36 исследования. Адаптированное целевое положение 42 обеспечивается посредством наложения на анатомическую область 36 исследования, просматриваемую через носимый на голове дисплей 34.
Это имеет преимущество, состоящее в том, что лицо, осуществляющее приготовление пациента к сбору данных, использует его/ее естественное поле зрения.
В еще одном примере (не показан) устройство 26 отображения является монитором. Устройство 22 обнаружения выполнено с обеспечением возможности визуального представления анатомической области исследования в текущем положении. Адаптированное целевое положение 42 предусмотрено представляемым посредством наложения на визуальное представление.
В дополнение к носимому на голове дисплею также может быть предусмотрен монитор для, чтобы показать пациента с другой точки зрения. Например, монитор может быть помещен на устройстве управления рентгеновского аппарата. Устройство обнаружения пациента, такое как камеры глубины, может быть прикреплено к рентгеновскому аппарату в фиксированном положении. Пользователь может временами смотреть на монитор, чтобы обеспечить правильное позиционирование пациента.
Адаптированное целевое положение 42 предусмотрено для направления при позиционировании анатомической области 36 исследования пациента 15 по отношению к установке медицинской визуализации для получения изображений.
Следует отметить, что устройство отображения 26 предусматривается только как необязательное. В еще одном примере (не показан) направляющая система 14 не снабжена устройством отображения. Например, определяется адаптированное целевое положение 42, которое используется для управления подвижной опорой анатомии (например, катушкой для МРТ) для того, чтобы автоматически передвинуть (скорректировать) анатомическую область исследования для получения изображений. В еще одном примере определяется адаптированное целевое положение 42 и предоставляется голосовая команда для направления при позиционировании анатомической области исследования, например, «перемещение предплечья на 2 см влево». В таких примерах, отображение адаптированного целевого положения не будет необходимым.
На Фиг. 2A показан пример первоначального целевого положения 40, например, хранящегося в базе данных, а на Фиг. 2B показан пример адаптированного целевого положения 42, например, через носимый на голове дисплей 34 (смотри Фиг. 1).
Как было указано выше, первоначальное целевое положение 40 представляет собой виртуальную сцену виртуального пациента в правильном положении или подходящей позе. Первоначальное целевое положение 40 может быть получено с помощью записи правильно расположенного пациента (или модели) камерой (например, камерой трехмерной поверхности) и хранящейся в базе данных. Таким образом, в первоначальном целевом положении 40, положение виртуального пациента (или анатомии) может быть привязано к опорной конструкции (например, рентгеновскому детектору). Хотя первоначальное целевое положение 40 можно использовать для целей направления, практически это приводит к некоторым сложностям. Например, пациент должен быть расположен так же, как виртуальный пациент, который необязательно мог быть получен для сбора данных.
Например, первоначальное целевое положение 40 на Фиг. 2A получается путем записи правильно поставленной виртуальной конечности 44 расположенной диагонально (от угла до угла) на детекторе 18 для медицинской визуализации. Однако не нужно располагать конечность 46 (смотри Фиг. 2B) пациента точно так же, как правильно поставленная виртуальная конечность 44. Некоторое параллельное перемещение конечности 46 пациента на поверхности детектора 18 для медицинской визуализации также может быть приемлемым для получения изображения, пока конечность 46 пациента расположена внутри детектора 18 для медицинской визуализации.
Адаптированное целевое положение 42 (обозначенное пунктирными линиями) на Фиг. 2B достигается путем совмещения первоначального целевого положения 40 на Фиг. 2А по меньшей мере в той мере, что касается клинически нерелевантных аспектов первоначального целевого положения 40, с текущей пространственной информацией об анатомической области исследования, т.е. конечности 46 пациента.
В одном из примеров, показанном в качестве варианта на Фиг. 2B, текущая пространственная информация может включать в себя текущее положение анатомической области исследования. Адаптированное целевое положение 42 можно совместить с текущим положением анатомической области исследования.
Термин «положение» относится к параллельно перемещаемому положению (или линейному положению), а также угловому положению (или ориентации, или повороту) виртуального пациента, которое может включать в себя одну или множество анатомий. Например, правильно поставленную виртуальную конечность 44 можно поворачивать вокруг оси, перпендикулярной к детектору 18 для медицинской визуализации (например, детектору рентгеновского излучения, как показано на Фиг. 2B) или параллельно перемещать по поверхности детектора 18 для медицинской визуализации для того, чтобы лучше подгонять к текущему положению конечности пациента. Адаптацию к текущему положению можно рассматривать как жесткое преобразование виртуального пациента.
В еще одном примере, показанном в качестве варианта на Фиг. 2B, текущая пространственная информация может включать в себя текущую позу анатомической области исследования. Адаптированное целевое положение 42 можно совместить с текущей позой анатомической области исследования.
Термин «поза» относится к относительному положению между анатомиями внутри виртуального пациента. Например, поза правильно поставленной виртуальной конечности 44 может относиться к прямому углу сгибания в голеностопном суставе.
Следует отметить, что только те относительные положения пациента, являющиеся релевантными для получения данных, сохраняются (т.е. не изменяются), в то время как нерелевантные относительные положения совмещаются (т.е. адаптируются) с пациентом.
Возьмем для примера Фиг. 1, так как положение предплечья и пальцев по отношению к оптической оси 45 в центре детектора 18 для медицинской визуализации имеет решающее значение для успешного сбора данных, предплечье и пальцы виртуального пациента локально должны быть синтезированы точно из лучших практических моделей, т.е. поза предплечья и пальцев у виртуального пациента должна оставаться неизменной. С другой стороны, плечо и верхнюю часть руки виртуального пациента можно совместить с анатомией пациента, т.е. пригнать к ней, так как они нерелевантны для получения данных.
В примере с Фиг. 2B это означает (небольшой) поворот стопы и (небольшую) регулировку угла в голеностопном суставе без необходимости параллельного перемещения и поворачивания всей ноги. В примере на Фиг. 1, это означает (небольшую) регулировку предплечья и пальцев без необходимости параллельного перемещения и поворачивания всей руки, а также необходимости регулировки плеча или верхней части руки. Это может уменьшить усилия для правильного позиционирования пациента, например, до получения рентгеновского изображения, особенно для менее обученного рентгенолога. Когда пациент сосредоточен только на совмещении соответствующих аспектов получения данных, могут быть уменьшены ошибки позиционирования. Кроме того, это может также сократить время на подготовку и таким образом нарастить ход работ.
В еще одном примере, показанном в качестве варианта на Фиг. 2B, текущая пространственная информация может содержать текущий размер анатомической области исследования. Адаптированное целевое положение 42 получают путем адаптации первоначального целевого положения к текущему размеру анатомической области исследования.
Другими словами, адаптированное целевое положение 42 может быть получено с помощью некоторых параметров масштабирования, основанных на размере обнаруженной анатомической области исследования. Например, адаптированное целевое положение конечности может быть изображено большим в случае большого пациента. В примере на Фиг. 2B, это означает, что правильно поставленная виртуальная конечность 44 имеет (точно) размер конечности 46 пациента.
Это позволяет лучше представить информацию о позиционировании пациентов с различными формами, как например высоких или маленьких пациентов, крупных или худых пациентов. Даже для одного и того же пациента изменения в геометрии пациента, вероятно, возникнут по мере изменения их веса. Поэтому, когда виртуальный пациент и реальный пациент имеют одинаковый размер анатомической области исследования (например, конечности 46 пациента на Фиг. 2B), совмещения анатомической области исследования с виртуальной моделью можно достичь гораздо проще и оно будет более точным.
В качестве варианта дополнения данные изображения адаптированного целевого положения 42 являются частично непрозрачными, так что относительное положение по глубине между адаптированным целевым положением 42 и анатомической областью исследования является ощутимым. Это обеспечивает преобразование сцены, которое является визуальным ориентиром для наблюдателя для того, чтобы оценить глубину, особенно относительную глубину двух объектов (адаптированного целевого положения 42 и анатомической области исследования) друг к другу, даже на моноскопическом изображении. Здесь поза пациента определяется в сцене и, таким образом, информация о глубине доступна для него. Это позволяет изобразить сцену, где поверхность пациента и поверхность модели смыкаются локально друг с другом, в соответствии с их взаимными расположениями. Такая визуализация делает возможным более точное визуальное наведение для позиционирования, чем одна только прозрачная дополненная реальность. Кроме того, она не полагается на стереоскопическое восприятие глубины как на единственный ориентир глубины. Это важное преимущество, так как часть населения не имеет стереоскопического зрения или оно нарушено.
В качестве варианта дополнения установка 10 медицинской визуализации дополнительно выполнена с возможностью выдачи и отображения графического представления 48 целевого источника, содержащего информацию дополненной реальности, указывающую целевое положение источника 16 для медицинской визуализации для получения изображений и/или графического представления детектора цели (далее не показан), содержащего информацию дополненной реальности, указывающую целевое положение детектора для медицинской визуализации для получения изображений. Например, графическое представление целевого источника содержит стрелку 50, показанную как часть виртуальной сцены, описывающей правильное положение источника 16 для медицинской визуализации (смотри Фиг. 1).
Хотя это и не показано, графическое представление 48 целевого источника может также включать в себя трехмерную виртуальную модель источника 16 для медицинской визуализации (например, источника для рентгеновской визуализации, как показано на Фиг.1 и 2B, или ультразвукового преобразователя (далее не показан)), описывающую правильное положение источника 16 для медицинской визуализации. Отклонение источника 16 медицинской визуализации от целевого положения также может отображаться, например, как «20 см от цели». Аналогично, графическое представление детектора цели может также включать в себя различную информацию дополненной реальности.
На Фиг. 3 показан способ 100 направления при позиционировании анатомической области исследования пациента. Способ включает в себя следующие этапы:
- На первом этапе 102, также обозначаемом как этап a), обнаруживают анатомическую область исследования пациента для получения изображений.
- На втором этапе 104, также обозначаемом как этап b), обнаруживают текущую пространственную информацию об обнаруженной анатомической области исследования.
- На третьем этапе 106, также обозначаемом как этап c), выдают первоначальное целевое положение обнаруженной анатомической области исследования.
- На четвертом этапе 108, также обозначаемом как этап d), подмножество первоначального целевого положения совмещают с текущей пространственной информацией в такой мере, что упомянутое подмножество становится клинически нерелевантным для получения медицинских изображений.
- На пятом этапе 110, также обозначаемом как этап e), на основе упомянутого совмещения определяют адаптированное целевое положение.
В одном из примеров, показанном в качестве варианта на Фиг. 4, способ 100 дополнительно содержит следующие этапы:
- На шестом этапе 112, также обозначаемом как этап f), генерируют данные изображения адаптированного целевого положения.
- На седьмом этапе 114, также обозначаемом как этап g), сгенерированные данные изображения адаптированного целевого положения отображают посредством наложения в виде графической информации о положении для выставления анатомической области исследования для получения изображения.
Этап a) может также обозначаться как этап обнаружения или контроля.
Этап b) может также обозначаться как этап отслеживания, который относится к оценке пространственной информации (оценки положения, оценки позы и/или оценки размера) об анатомической области исследования.
Этапы c) и d) вместе могут также обозначаться как этап совмещения.
Этап e) может также обозначаться как этап адаптации.
Этап g) может также обозначаться как этап визуализации и представления.
В одном из примеров адаптированное целевое положение содержит информацию дополненной реальности. Информация дополненной реальности содержит трехмерную виртуальную модель обнаруженной анатомической области исследования.
В еще одном примере, показанном в качестве варианта на Фиг. 4 (указанном с помощью соединения пунктирной линией), способ 100 дополнительно содержит: h) выдачу и отображение 116 графического представления целевого источника, содержащего информацию дополненной реальности, указывающую целевое положение источника для медицинской визуализации, для получения изображений и/или графического представления детектора (далее не показан) цели, содержащего информацию дополненной реальности, указывающую целевое положение детектора для медицинской визуализации, для получения изображений.
Для лучшего понимания, на Фиг. 4 показано фотографическое изображение в соответствии с чертежом, показанным на Фиг. 2B. В результате одинаковые ссылочные позиции обозначаются с учетом Фиг. 2B. Таким образом, во избежание ненужных повторений, описание по отношению к Фиг. 4 не является необходимым.
В другом примерном варианте осуществления настоящего изобретения обеспечена компьютерная программа или элемент компьютерной программы, который отличается тем, что выполнен с возможностью исполнять этапы способа согласно способу в соответствии с одним из предшествующих вариантов осуществления в соответствующей системе
Элемент компьютерной программы может храниться на вычислительном блоке, который также может быть частью варианта осуществления настоящего изобретения. Этот вычислительный блок может быть выполнен с возможностью исполнять или инициировать выполнение этапов способа, описанного выше. Кроме того, он может быть выполнен с возможностью задействовать компоненты вышеописанного устройства. Вычислительный блок может быть выполнен с возможностью работы автоматически и/или выполнения приказов пользователя. Компьютерная программа может быть загружена в рабочую память процессора обработки данных. Таким образом, процессор обработки данных может быть оснащен для осуществления способа согласно изобретению.
Этот примерный вариант осуществления изобретения охватывает как компьютерную программу, которая с самого начала применяется в изобретении и компьютерную программу, которая посредством обновления превращает существующую программу в программу, используемую в изобретении.
Далее, элемент компьютерной программы может быть в состоянии обеспечить все необходимые этапы для выполнения процедуры примерного варианта осуществления способа как описано выше.
В соответствии с еще одним примерным вариантом осуществления настоящего изобретения обеспечен машиночитаемый носитель, такой как CD-ROM, причем машиночитаемый носитель содержит сохраненный на нем элемент компьютерной программы, причем упомянутый элемент компьютерной программы описан в предыдущем параграфе. Компьютерная программа может сохраняться и/или распространяться на подходящих носителях, таких как средства оптического хранения информации или твердотельных носителях информации, поставляемых вместе или как часть других аппаратных средств, но также может распространяться в других формах, таких как через Интернет или другие проводные или беспроводные телекоммуникационные системы. Однако компьютерная программа может быть также предоставлена через сеть, такую как всемирная компьютерная сеть и может быть загружена в оперативную память процессора обработки данных из такой сети. Согласно еще одному примерному варианту осуществления настоящего изобретения, предоставляется носитель для создания элемента компьютерной программы, доступного для скачивания, причем этот элемент компьютерной программы выполнен с возможностью исполнения способа в соответствии с одним из описанных выше вариантов осуществления изобретения.
Следует отметить, что варианты осуществления изобретения описаны в отношении различных предметов изобретения. В частности, некоторые варианты осуществления описаны в отношении пунктов формулы изобретения, описывающих способы, тогда как другие варианты осуществления описаны в отношении пунктов формулы изобретения, описывающих устройства. Однако специалист в данной области поймет из приведенного выше и нижеследующего описания, что, пока не указано иное, в дополнение к любому сочетанию признаков, принадлежащих объекту изобретения одного рода, любое сочетание признаков, относящихся к различным объектам изобретения, также рассматривается раскрытым в этой заявке. Тем не менее, все признаки могут быть объединены, обеспечивая синергетический эффект, который больше, чем простое суммирование признаков.
Хотя изобретение было проиллюстрировано и подробно описано на чертежах и предшествующем описании, такие иллюстрации и описание должны рассматриваться как иллюстративные или приведенные в качестве примера, а не ограничивающие. Изобретение не ограничивается описанными вариантами осуществления. Изучив чертежи, раскрытие и приложенную формулу изобретения, специалисты в данной области смогут понять и осуществить при практической реализации заявленного изобретения другие вариации показанных вариантов осуществления.
В формуле изобретения слово «содержит» не исключает других элементов или этапов, а формы единственного числа не исключают множественного числа. Один процессор или другой блок может выполнить функции нескольких пунктов перечисленных в формуле изобретения. Сам факт того, что определенные меры перечислены во взаимно отличных зависимых пунктах формулы изобретения, не указывает на то, что сочетание этих мер нельзя использовать с пользой. Любые ссылочные позиции в формуле изобретения не должны рассматриваться в качестве ограничения объема.
Настоящее изобретение относится к направлению позиционирования для получения данных изображений. Для того чтобы облегчить позиционирование пациента для получения медицинских изображений, предлагается направляющая система. Система включает в себя устройство обнаружения пациента и задающее положение пациента устройство. Устройство обнаружения пациента выполнено с возможностью обнаружения анатомической области исследования пациента для получения изображений и для обнаружения текущей пространственной информации об анатомической области исследования. Задающее положение пациента устройство выполнено с возможностью выдачи первоначального целевого положения для обнаруженной анатомической области исследования, причем первоначальное целевое положение выдается в качестве опорного для получения изображений. Задающее положение пациента устройство дополнительно выполнено с возможностью совмещения первоначального целевого положения с текущей пространственной информацией и определения адаптированного целевого положения путем адаптации первоначального целевого положения на основе текущей пространственной информации так, что адаптированное целевое положение лучше соответствует текущей пространственной информации, причем адаптация первоначального целевого положения просто относится к его подмножеству, которое клинически нерелевантно для получения медицинских изображений. Необязательно, задающее положение пациента устройство дополнительно выполнено с возможностью генерации данных изображения адаптированного целевого положения, и обеспечено устройство отображения, которое выполнено с возможностью отображения сгенерированных данных изображения адаптированного целевого положения посредством наложения на анатомическую область исследования в качестве графической информации о выставлении анатомической области исследования для получения изображения. 4 н. и 10 з.п. ф-лы, 4 ил.
1. Направляющая система (14) для позиционирования пациента для получения медицинских изображений, содержащая:
- устройство (22) обнаружения положения пациента и
- задающее положение пациента устройство (24);
причем устройство обнаружения пациента выполнено с возможностью: обнаружения анатомической области исследования (36) пациента для получения медицинских изображений и обнаружения текущей пространственной информации об анатомической области исследования; и
причем задающее положение пациента устройство выполнено с возможностью: выдачи первоначального целевого положения (40), являющегося виртуальной сценой виртуального пациента в правильном положении, для обнаруженной анатомической области исследования во время получения изображений и адаптации подмножества первоначального целевого положения с текущей пространственной информацией об анатомической области исследования в такой мере, что упомянутое подмножество клинически нерелевантно для получения медицинских изображений, тем самым обеспечивая адаптированное целевое положение (42),
причем адаптированное целевое положение включает в себя информацию дополненной реальности,
причем устройство обнаружения пациента выполнено с обеспечением возможности визуального представления анатомической области исследования и причем адаптированное целевое положение обеспечено посредством наложения на упомянутое визуальное представление.
2. Направляющая система по п. 1, причем задающее положение пациента устройство выполнено с возможностью генерации данных изображения адаптированного целевого положения; и содержит устройство (26) отображения, выполненное с возможностью отображения сгенерированных данных изображения адаптированного целевого положения посредством наложения на анатомическую область исследования.
3. Направляющая система по п. 1, причем информация дополненной реальности включает в себя трехмерную виртуальную модель обнаруженной анатомической области исследования.
4. Направляющая система по одному из предыдущих пунктов, причем текущая пространственная информация включает в себя текущее положение, текущую позу и/или текущий размер.
5. Направляющая система по одному из предыдущих пунктов, причем первоначальное целевое положение связано с заданным типом исследования, выбираемым из:
i) списка в базе данных, который включает в себя множество видов исследования;
ii) электронной системы планирования и/или
iii) множества меток, причем каждая метка связана с соответствующим заданным типом исследования.
6. Направляющая система по одному из пп. 2-5, причем устройство отображения выполнено с возможностью отображения адаптированного целевого положения частично непрозрачным.
7. Направляющая система по одному из пп. 2-6, причем устройство отображения содержит носимый на голове дисплей (34), с помощью которого пользователь может просматривать анатомическую область исследования, причем адаптированное целевое положение обеспечивается посредством наложения на анатомическую область исследования, просматриваемую через носимый на голове дисплей; и/или монитор.
8. Установка (10) медицинской визуализации, содержащая:
- направляющую систему по одному из предыдущих пунктов
- и систему (12) получения изображений,
- содержащую источник (16) для медицинской визуализации и детектор (18) для медицинской визуализации; причем источник для медицинской визуализации выполнен с возможностью выдавать визуализирующее поле (20), обнаруживаемое детектором для медицинской визуализации.
9. Установка медицинской визуализации по п. 8, причем установка медицинской визуализации содержит по меньшей мере одно из группы:
- установка рентгеновской визуализации и
- установка ультразвуковой визуализации.
10. Установка медицинской визуализации по п. 9, причем установка медицинской визуализации дополнительно выполнена с возможностью выдачи и отображения:
- графического представления целевого источника, содержащего информацию дополненной реальности, указывающую целевое положение источника для медицинской визуализации, для получения изображений; и/или
- графического представления детектора цели, содержащего информацию дополненной реальности, указывающую целевое положение детектора для медицинской визуализации, для получения изображений.
11. Способ (100) направления позиционирования анатомической области исследования пациента, содержащий следующие этапы:
a) обнаружение (102) анатомической области исследования пациента для получения изображений с обеспечением возможности визуального представления анатомической области исследования, и причем адаптированное целевое положение обеспечено посредством наложения на упомянутое визуальное представление;
b) обнаружение (104) текущей пространственной информации об обнаруженной анатомической области исследования;
c) выдача (106) первоначального целевого положения, являющегося виртуальной сценой виртуального пациента в правильном положении, для обнаруженной анатомической области исследования во время получения медицинских изображений;
d) адаптация (108) подмножества первоначального целевого положения с упомянутой текущей пространственной информацией об анатомической области исследования до такой степени, что упомянутое подмножество клинически нерелевантно для получения медицинских изображений;
e) определение (110) адаптированного целевого положения на основе упомянутого совмещения, причем адаптированное целевое положение включает в себя информацию дополненной реальности.
12. Способ по п. 11, дополнительно содержащий следующие этапы:
f) генерирование (112) данных изображения адаптированного целевого положения и
g) отображение сгенерированных данных изображения адаптированного целевого положения посредством наложения на анатомическую область исследования.
13. Способ по п. 11 или 12, дополнительно содержащий:
h) выдачу и отображение (116) графического представления целевого источника, содержащего информацию дополненной реальности, указывающую целевое положение источника для медицинской визуализации, для получения изображений и/или графического представления детектора цели, содержащего информацию дополненной реальности, указывающую целевое положение детектора для медицинской визуализации, для получения изображений.
14. Машиночитаемый носитель, содержащий сохраненный на нем элемент компьютерной программы для управления установкой медицинской визуализации по одному из пп. 8-10, который, будучи исполняемым блоком обработки, выполнен с возможностью осуществлять этапы способа по одному из пп. 11-13.
| US 6764217 B2, 11.07.2002 | |||
| AU 200153996 B2, 23.08.2001 | |||
| WO 2015011987 A1, 29.01.2015 | |||
| RU 2006103781 A, 20.09.2007. |

