Перекрестная ссылка на родственные заявки
[0001] Данная заявка испрашивает приоритет китайской патентной заявки № 201710874065.2, поданной 25 сентября 2017 г., китайской патентной заявки № 201711242643.7, поданной 30 ноября 2017 г., китайской патентной заявки № 201711384644.5, поданной 20 декабря 2017 г., и китайской патентной заявки № CN201810671197.X, поданной 26 июня 2018 г., содержание которых включено в данный документ посредством ссылки во всей их полноте.
Область техники
[0002] Настоящее изобретение в целом относится к медицинской системе и, более конкретно, к системе и способу определения местоположения целевого объекта при медицинской процедуре или при визуализации.
Уровень техники
[0003] При хирургической операции (например, при процедуре пунктирования) оператор может проводить хирургическую операцию в месте поражения (например, в месте пунктирования), связанном с целевым объектом (например, с пациентом). Анатомическое изображение может быть получено путем испускания рентгеновских лучей в направлении целевого объекта с помощью медицинской системы визуализации, которая может помочь оператору определить место поражения. В некоторых случаях место поражения может быть обнаружено на основании анатомического изображения и клинического опыта оператора, что может быть относительно неэффективно или неточно. В некоторых случаях при хирургической операции анатомические изображения могут быть необходимы под разными углами, и оператору может потребоваться настраивать излучение рентгеновских лучей (например, направление рентгеновских лучей), чтобы гарантировать, что место поражения находится в центре или около центра анатомического изображения под разными углами. В некоторых случаях для управления хирургической операцией в реальном времени (например, для навигации операционного оборудования), по меньшей мере, одно дополнительное устройство (например, каталку) используют для размещения навигационного устройства в операционной. С одной стороны, дополнительное устройство может занимать пространство в операционной. С другой стороны, дополнительное устройство перед навигацией может быть необходимо регистрировать в медицинской системе визуализации, что может быть неэффективно. Таким образом, может быть желательна разработка способа или системы определения местоположения целевого объекта или целевого устройства при процедуре медицинской визуализации.
Сущность изобретения
[0004] В одном аспекте настоящего изобретения может быть представлена рентгеновская система. Рентгеновская система может включать: источник рентгеновского излучения, выполненный с возможностью испускать пучок рентгеновского излучения в направлении целевого объекта; компонент детектирования, выполненный с возможностью принимать по меньшей мере часть пучка рентгеновского излучения, которая проходит через целевой объект; дугу, выполненную с возможностью поддерживать компонент детектирования и источник рентгеновского излучения; платформу, выполненную с возможностью размещения целевого объекта, причем платформа помещают между источником рентгеновского излучения и компонентом детектирования; и первый компонент позиционирования, выполненный с возможностью определения целевой точки, где локализована область интереса (ROI) целевого объекта, где первый компонент позиционирования включает в себя первый лазерный компонент, выполненный с возможностью испускать первый лазерный луч, и второй лазерный компонент, выполненный с возможностью испускать второй лазерный луч, при этом указанные первый и второй лазерный луч пересекаются в целевой точке.
[0005] В некоторых вариантах осуществления дуга может охватывать группу, выбираемую из С-дуги и G-дуги.
[0006] В некоторых вариантах осуществления целевая точка может быть локализована на пересечении первого пучка рентгеновского излучения, испускаемого источником рентгеновского излучения, когда дуга находится во фронтальном положении, и второго пучка рентгеновского излучения, испускаемого источником рентгеновского излучения, когда дуга находится в боковом положении.
[0007] В некоторых вариантах осуществления целевая точка может быть локализована на пересечении между центральной осью указанного первого пучка рентгеновского излучения и центральной осью указанного второго пучка рентгеновского излучения.
[0008] В некоторых вариантах осуществления первый лазерный компонент может быть установлен на участке, выбранном из источника рентгеновского излучения и компонентом детектирования.
[0009] В некоторых вариантах осуществления первый лазерный компонент может быть установлен на внешней стороне компонента детектирования.
[0010] В некоторых вариантах осуществления второй лазерный компонент может быть установлен на внутренней стороне дуги.
[0011] В некоторых вариантах осуществления один из первого лазерного луча и второго лазерного луча может иметь форму креста, и другой луч имеет форму щели.
[0012] В некоторых вариантах осуществления первый лазерный луч или второй лазерный луч с формой креста могут испускаться перекрестным лазерным генератором или двумя перпендикулярными щелевыми лазерными генераторами.
[0013] В некоторых вариантах осуществления система также включает в себя устройство определения положения, выполненное с возможностью определения угла поворота дуги, где устройство определения позиционирования установлено на дуге; и подсказывающее устройство, выполненное с возможностью подсказывать угол поворота, при этом подсказывающее устройство соединено с устройством определения положения.
[0014] В некоторых вариантах осуществления система также может включать третий лазерный излучающий компонент, выполненный с возможностью испускать третий лазерный луч с первым заданным шаблоном на целевом объекте; и второй компонент позиционирования, расположенный между компонентом детектирования и платформой, где первый заданный шаблон, спроецированный на второй компонент позиционирования, совпадает с шаблоном второго компонента позиционирования, и второй компонент позиционирования выполнен с возможностью локализовать целевой объект на основании первого заданного шаблона и анатомического изображения, связанного с целевым объектом, полученного путем проецирования пучка рентгеновского излучения в направлении целевого объекта.
[0015] В некоторых вариантах осуществления путь распространения третьего лазерного луча, испускаемого третьим лазерным излучающим компонентом, может совпадать со вторым путем распространения пучка рентгеновского излучения, испускаемого источником рентгеновского излучения.
[0016] В некоторых вариантах осуществления система также может включать третий компонент позиционирования, выполненный с возможностью получать информацию о местоположении целевого устройства, связанного с целевым объектом, в режиме реального времени.
[0017] В некоторых вариантах осуществления третий компонент позиционирования может включать по меньшей мере два детектора позиционирования.
[0018] Во втором аспекте настоящего изобретения предложена рентгеновская система. Рентгеновская система может включать: источник рентгеновского излучения, выполненный с возможностью испускать пучок рентгеновского излучения в направлении целевого объекта; компонент детектирования, выполненный с возможностью принимать по меньшей мере часть пучка рентгеновского излучения, которая проходит через целевой объект; дугу, выполненную с возможностью поддерживать компонент детектирования и источник рентгеновского излучения; платформу, выполненную с возможностью размещения целевого объекта, причем платформа помещена между источником рентгеновского излучения и компонентом детектирования; лазерный излучающий компонент, выполненный с возможностью испускать лазерный луч с первым заданным шаблоном на целевом объекте; и компонент позиционирования, расположенный между компонентом детектирования и платформой, где первый заданный шаблон, спроецированный на компонент позиционирования, совпадает с шаблоном компонента позиционирования, и компонент позиционирования выполнен с возможностью локализовать целевой объект на основании первого заданного шаблона и анатомического изображения, связанного с целевым объектом, полученного путем проецирования пучка рентгеновского излучения в направлении целевого объекта.
[0019] В некоторых вариантах осуществления дуга может быть охватывать группу, выбираемую из С-дуги и G-дуги.
[0020] В некоторых вариантах осуществления первый заданный шаблон может иметь сетки, выбираемые из группы, включающей в себя регулярные линии, сетки, включающие в себя правильные многоугольники, сетки, включающие в себя неправильные многоугольники, сетки, включающие в себя регулярные кривые, и сетки, включающие в себя круги.
[0021] В некоторых вариантах осуществления первый путь распространения указанного лазерного луча может совпадать со вторым путем распространения указанного пучка рентгеновского излучения.
[0022] В некоторых вариантах осуществления лазерный излучающий компонент может быть установлен на источнике рентгеновского излучения.
[0023] В некоторых вариантах осуществления источник рентгеновского излучения может включать: рентгеновский компонент, выполненный с возможностью испускать пучок рентгеновского излучения в направлении целевого объекта; и компонент управления лазером под рентгеновским компонентом, включающий в себя отражатель и лазерный излучающий компонент, причем первый путь распространения лазерного луча, испускаемого лазерным излучающим компонентом, после отражения отражателем совпадает со вторым путем распространения пучка рентгеновского излучения.
[0024] В некоторых вариантах осуществления компонент позиционирования может включать по меньшей мере один маркер позиционирования, и по меньшей мере один маркер позиционирования выполнен с возможностью локализовать целевой объект.
[0025] В некоторых вариантах осуществления по меньшей мере один маркер позиционирования может включать по меньшей мере один лазерный маркер.
[0026] В некоторых вариантах осуществления, по меньшей мере один маркер позиционирования может располагаться по меньшей мере на одном пересечении сеток первого заданного шаблона.
[0027] В некоторых вариантах осуществления компонент позиционирования может быть расположен на поверхности компонента детектирования, обращенной к платформе.
[0028] В некоторых вариантах осуществления система также может включать устройство перемещения, выполненное с возможностью перемещать компонент позиционирования от поверхности компонента детектирования, обращенной к платформе.
[0029] В некоторых вариантах осуществления устройство перемещения включает в себя передаточный механизм, выполненный с возможностью перемещать компонент позиционирования, причем передаточный механизм соединен с компонентом позиционирования.
[0030] В некоторых вариантах осуществления компонент позиционирования может быть размещен на компоненте детектирования или смотан с помощью передаточного механизмом.
[0031] В некоторых вариантах осуществления передаточный механизм может включать по меньшей мере одно колесо передачи, и при этом передаточный механизм соединен с компонентом позиционирования по меньшей мере через одно колесо передачи.
[0032] В некоторых вариантах осуществления система также может включать второй компонент позиционирования, выполненный с возможностью получать информацию о местоположении целевого устройства, связанного с целевым объектом, в режиме реального времени.
[0033] В некоторых вариантах осуществления второй компонент позиционирования может включать по меньшей мере один детектор позиционирования.
[0034] В третьем аспекте настоящего изобретения предложена рентгеновская система. Рентгеновская система может включать источник рентгеновского излучения, выполненный с возможностью испускать пучок рентгеновского излучения в направлении целевого объекта; компонент детектирования, выполненный с возможностью принимать по меньшей мере часть пучка рентгеновского излучения, которая проходит через целевой объект; дугу, выполненную с возможностью поддерживать компонент детектирования и источник рентгеновского излучения; платформу, выполненную с возможностью размещения целевого объекта, причем платформа помещена между источником рентгеновского излучения и компонентом детектирования; и компонент позиционирования, выполненный с возможностью получать информацию о положении целевого устройства, связанного с целевым объектом, в режиме реального времени.
[0035] В некоторых вариантах осуществления дуга может охватывать группу, выбираемую из С-дуги и G-дуги.
[0036] В некоторых вариантах осуществления целевое устройство, связанное с целевым объектом, может включать операционное оборудование.
[0037] В некоторых вариантах осуществления компонент позиционирования может включать по меньшей мере два детектора позиционирования.
[0038] В некоторых вариантах осуществления, по меньшей мере два детектора позиционирования могут быть способны перемещаться, чтобы регулировать по меньшей мере два расстояния, по меньшей мере, между двумя детекторами позиционирования.
[0039] В некоторых вариантах осуществления компонент позиционирования может включать, по меньшей мере, один стержень с возвратно-поступательным движением, причем конец каждого, по меньшей мере, из одного стержня с возвратно-поступательным движением установлен на дуге.
[0040] В некоторых вариантах осуществления каждый, по меньшей мере, из одного стержня с возвратно-поступательным движением может соответствовать каждому из детектора позиционирования.
[0041] В некоторых вариантах осуществления третий компонент позиционирования может включать по меньшей мере одну рельсовую направляющую, где по меньшей мере одна рельсовая направляющая установлена на дуге.
[0042] В некоторых вариантах осуществления детектор позиционирования может скользить по меньшей мере по одной рельсовой направляющей.
[0043] В некоторых вариантах осуществления рельсовая направляющая может включать рельсовую направляющую возвратно-поступательного движения.
[0044] В некоторых вариантах осуществления компонент позиционирования может быть установлен на компоненте детектирования или источнике рентгеновского излучения.
[0045] В некоторых вариантах осуществления компонент позиционирования может быть установлен с возможностью скольжения по дуге.
[0046] В некоторых вариантах осуществления дуга может вмещать по меньшей мере одну рельсовую направляющую.
[0047] В некоторых вариантах осуществления детектор позиционирования может включать по меньшей мере один блок скольжения, совмещенный по меньшей мере с одной рельсовой направляющей.
[0048] В некоторых вариантах осуществления детектор позиционирования может включать оптический детектор позиционирования.
[0049] В четвертом аспекте настоящего изобретения может быть предложен способ позиционирования рентгеновской системы. Рентгеновская система может включать источник рентгеновского излучения, компонент детектирования, дугу, платформу, первый компонент позиционирования, включающий в себя первый лазерный компонент, и второй лазерный компонент, и этот способ позиционирования включает в себя поворот дуги во фронтальное положение; инициирование первого лазерного компонента и второго лазерного компонента; и определение целевой точки на основании пересечения между первым лазерным лучом, испускаемым первым лазерным компонентом, и вторым лазерным лучом, испускаемым вторым лазерным компонентом.
[0050] В пятом аспекте настоящего изобретения может быть предложен способ позиционирования рентгеновской системы. Рентгеновская система может включать источник рентгеновского излучения, компонент детектирования, дугу, платформу, компонент позиционирования и лазерный излучающий компонент, и этот способ позиционирования включает в себя установку компонента позиционирования между компонентом детектирования и целевым объектом; получение наложенного изображения, включающего в себя анатомическое изображение, связанное с целевым объектом, полученное путем проецирования детекторного луча в направлении целевого объекта, и шаблон компонента позиционирования, сформированный на поверхности целевого объекта; определение места поражения, связанного с целевым объектом, на основании наложенного изображения и первого заданного шаблона, определенного путем проецирования позиционирующего луча к целевому объекту с помощью лазерного излучающего компонента; и определение целевой точки, соответствующей месту поражения, на основании наложенного изображения и первого заданного шаблона.
[0051] В шестом аспекте настоящего изобретения предложен способ позиционирования рентгеновской системы. Рентгеновская система может включать источник рентгеновского излучения, компонент детектирования, дугу и платформу, и этот способ позиционирования включает в себя получение анатомического изображения, связанного с целевым объектом, путем проецирования детекторного луча в направлении целевого объекта; наложение первого шаблона на анатомическое изображение; формирование второго шаблона на поверхности целевого объекта путем проецирования позиционирующего луча к целевому объекту, где первый шаблон совпадает со вторым шаблоном; и определение целевой точки на основании анатомического изображения и второго шаблона.
[0052] В некоторых вариантах осуществления первый шаблон или второй шаблон может включать сетки.
[0053] В некоторых вариантах осуществления определение указанной целевой точки на основании анатомического изображения и второго шаблона включает в себя: определение места поражения, связанного с целевым объектом, на основании анатомического изображения; и определение целевой точки на сетках второго шаблона на основании места поражения.
[0054] В некоторых вариантах осуществления определение указанного места поражения, связанного с целевым объектом, на основании анатомического изображения включает в себя: получение диагностической информации, связанной с целевым объектом; и определение места поражения, связанного с целевым объектом, на основании диагностической информации.
[0055] В некоторых вариантах осуществления способ также может включать отображение диагностической информации, связанной с целевым объектом, на анатомическом изображении.
[0056] В некоторых вариантах осуществления определение целевой точки на сетках второго шаблона на основании места поражения включает в себя определение соотношения между множеством первых точек на сетках первого шаблона и множеством вторых точек, соответствующих множеству первых точек на сетках второго шаблона.
[0057] В некоторых вариантах осуществления способ также может включать маркировку целевой точки путем проецирования маркерного луча или позиционирующего луча на целевой объект.
[0058] В некоторых вариантах осуществления маркерного луч испускается лазерным устройством, установленным на дуге.
[0059] В некоторых вариантах осуществления целевая точка может представлять собой место, где проводят хирургическую операцию.
[0060] В некоторых вариантах осуществления способ также может включать настройку позиционирующего луча на основании первого шаблона и второго шаблона, спроецированного с помощью позиционирующего луча.
[0061] В некоторых вариантах осуществления настройка позиционирующего луча на основании первого шаблона и второго шаблона, спроецированного с помощью позиционирующего луча, включает в себя: настройку позиционирующего луча, если второй шаблон, спроецированный с помощью позиционирующего луча, не совпадает с первым шаблоном.
[0062] Дополнительные признаки частично изложены в нижеследующем описании, а частично станут очевидны для специалиста в данной области техники при изучении приведенных ниже и сопроводительных чертежей или могут быть изучены путем изготовления или эксплуатации примеров. Признаки настоящего изобретения могут быть реализованы и достигнуты путем осуществления на практике или при применении различных аспектов методологий, инструментов и комбинаций, изложенных в подробных примерах, рассмотренных ниже.
Краткое описание чертежей
[0063] Настоящее изобретение также описано с помощью примеров вариантов осуществления. Такие примеры вариантов осуществления описаны подробно со ссылкой на чертежи. Эти варианты осуществления являются неограничивающими типичными вариантами осуществления, в которых подобные ссылочные позиции означают аналогичные структуры на всех нескольких видах чертежей.
[0064] ФИГ. 1 представляет собой принципиальную схему, иллюстрирующую типичную рентгеновскую систему в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0065] ФИГ. 2 представляет собой принципиальную схему, иллюстрирующую типичные компоненты аппаратурного и/или программного обеспечения типичного компьютерного устройства в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0066] ФИГ. 3 представляет собой принципиальную схему, иллюстрирующую типичные компоненты аппаратурного и/или программного обеспечения типичного мобильного устройства в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0067] ФИГ. 4 представляет собой принципиальную схему, иллюстрирующую типичную рентгеновскую систему во фронтальном положении в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0068] ФИГ. 5 представляет собой принципиальную схему, иллюстрирующую типичную рентгеновскую систему в боковом положении в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0069] ФИГ. 6 представляет собой принципиальную схему, иллюстрирующую типичный путь распространения пучка рентгеновского излучения, испускаемого источником рентгеновского излучения, и типичный путь распространения первого лазерного луча, испускаемого первым лазерным компонентом, в соответствии с некоторыми вариантами осуществления.
[0070] ФИГ. 7 представляет собой схему последовательности операций, иллюстрирующую способ определения целевой точки, где локализована область интереса (ROI) целевого объекта, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0071] ФИГ. 8-9 представляют собой принципиальные схемы, иллюстрирующие типичную рентгеновскую систему в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0072] ФИГ. 10-11 представляют собой принципиальные схемы, иллюстрирующие типичный третий компонент позиционирования в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0073] ФИГ. 12 представляет собой принципиальную схему, иллюстрирующую типичную рентгеновскую систему в соответствии с некоторыми вариантами осуществления.
[0074] ФИГ. 13 представляет собой принципиальную схему, иллюстрирующую типичный путь распространения пучка рентгеновского излучения, испускаемого источником рентгеновского излучения, и типичный путь распространения первого лазерного луча, испускаемого первым лазерным компонентом, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0075] ФИГ. 14 представляет собой принципиальную схему, иллюстрирующую типичный шаблон второго компонента позиционирования в соответствии с некоторыми вариантами осуществления.
[0076] ФИГ. 15 представляет собой принципиальную схему, иллюстрирующую типичное анатомическое изображение, связанное с типичным шаблоном второго компонента позиционирования в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0077] ФИГ. 16-19 представляют собой принципиальную схему, иллюстрирующую типичные вторые компоненты позиционирования в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0078] ФИГ. 20 представляет собой схему последовательности операций, иллюстрирующую способ определения целевой точки в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0079] ФИГ. 21 представляет собой схему последовательности операций, иллюстрирующую типичное обрабатывающее устройство 120 в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0080] ФИГ. 22 представляет собой схему последовательности операций, иллюстрирующую способ определения целевой точки рентгеновской системы в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0081] ФИГ. 23 представляет собой схему последовательности операций, иллюстрирующую способ определения целевой точки, связанной с целевым объектом, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0082] ФИГ. 24 схему последовательности операций, иллюстрирующую типичный способ определения места поражения, связанного с целевым объектом, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
Подробное описание
[0083] В приведенном ниже подробном описании многочисленные конкретные детали представлены в качестве примеров, чтобы обеспечить полное понимание соответствующего изобретения. Однако специалисту в данной области техники будет очевидно, что настоящее изобретение может быть реализовано на практике без таких деталей. В других случаях хорошо известные методы, процедуры, системы, компоненты и/или схемы описаны на относительно высоком уровне, без подробностей, чтобы избежать излишнего затенения аспектов настоящего изобретения. Различные модификации раскрытых вариантов осуществления будут с легкостью очевидны для специалиста в данной области техники, и общие принципы, определенные в настоящем документе, могут быть применены к другим вариантам осуществления и областям применения без отступления от сути и объема настоящего изобретения. Таким образом, настоящее изобретение не ограничено показанными вариантами осуществления, а ему следует предоставить самый широкий объем, соответствующий формуле изобретения.
[0084] Терминология, используемая в документе, служит цели описания конкретных примеров вариантов осуществления и не предназначена для ограничения. Используемые здесь формы единственного числа также могут включать в себя формы множественного числа, если контекст явно не указывает на иное. Также следует понимать, что термины «содержат», «содержит» и/или «содержащий», «включают», «включает в себя» и/или «включающий в себя», используемые в настоящем описании, определяют наличие заявленных признаков, целых чисел, этапов, операций, элементов и/или компонентов, но не исключают присутствие или добавление одного или нескольких других признаков, целых чисел, этапов, операций, элементов, компонентов и/или их групп.
[0085] Следует понимать, что используемые здесь термины «система», «машина», «узел», «модуль» и/или «блок» являются одним из способов различения разных компонентов, элементов, деталей, секций или узлов разного уровня в порядке возрастания. Однако эти термины могут быть заменены другим выражением, если они достигают той же цели.
[0086] Обычно слово «модуль», «узел» или «блок», используемое здесь, относится к логике, воплощенной в аппаратном обеспечении или встроенном программном обеспечении (прошивке), или к набору программных команд. Модуль, узел или блок, описанные в настоящем документе, могут быть реализованы в виде программного и/или аппаратного обеспечения и могут храниться на любом типе невременного компьютерно-читаемого носителя или другого устройства для хранения информации. В некоторых вариантах осуществления программный модуль/узел/блок может быть скомпилирован и связан в исполняемую программу. Следует отметить, что программные модули могут быть вызваны из других модулей/узлов/блоков или сами по себе и/или могут быть вызваны в ответ на обнаруженные события или прерывания. Программные модули/узлы/блоки, выполненные с возможностью исполнения на вычислительных устройствах (например, процессор 210, как показано на ФИГ. 2) может быть представлен на компьютерно-читаемом носителе, таком как компакт-диск, цифровой видеодиск, флэш-накопитель, магнитный диск или любой другой материальный носитель информации, или в виде цифровой загрузки (и может первоначально храниться в сжатом или устанавливаемом формате, который требует установки, развертывания или расшифровки перед выполнением). Такой программный код может быть сохранен, частично или полностью, на устройстве для хранения информации исполняющего вычислительного устройства для выполнения вычислительным устройством. Программные команды могут быть встроены в прошивку, например, EPROM. Следует также отметить, что аппаратные модули/узлы/блоки могут быть включены в подключенные логические компоненты, такие как вентили и триггеры, и/или могут быть включены в программируемые блоки, такие как программируемые вентильные матрицы или процессоры. Описанные здесь модули/узлы/блоки или функциональные возможности вычислительных устройств могут быть реализованы в виде программных модулей/узлов/блоков, но могут быть представлены в аппаратном или встроенном программном обеспечении. В общем случае модули/узлы/блоки, описанные здесь, относятся к логическим модулям/узлам/блокам, которые могут быть объединены с другими модулями/узлами/блоками или разделены на подмодули/подузлы/подблоки, несмотря на их физическую организацию или хранение. Это описание можно применить к системе, машине или их части.
[0087] Следует понимать, что, когда узел, машина, модуль или блок обозначены как «включенный», «подключенный к» или «присоединенный к» другому узлу, машине, модулю или блоку, он может быть напрямую включен, подключен или присоединен к другому узлу, машине, модулю или блоку, или может взаимодействовать с ним, или может присутствовать промежуточный узел, машина, модуль или блок, если контекст четко не указывает на иное. Используемый здесь термин «и/или» включает в себя любые и все комбинации одного или нескольких связанных перечисленных элементов.
[0088] Эти и другие признаки, а также характеристики настоящего изобретения, а также способы работы и функции соответствующих элементов структуры и комбинация частей и экономика производства могут стать очевидными при рассмотрении следующего описания со ссылкой на сопроводительные чертежи, все из которых являются частью изобретения. Однако следует четко понимать, что чертежи представлены только с целью иллюстрации и описания и не предназначены для ограничения объема настоящего раскрытия. Понятно, что чертежи выполнены не в масштабе.
[0089] Схемы последовательности операций, используемые в настоящем изобретении, иллюстрируют операции, которые системы выполняют в соответствии с некоторыми вариантами осуществления настоящего изобретения. Следует четко понимать, что операции схемы последовательности операций могут быть выполнены не по порядку. И, наоборот, операции могут быть выполнены в обратном порядке или одновременно. Более того, одна или несколько других операций могут быть добавлены к схеме последовательности операций. Одна или несколько операций могут быть исключены из схемы.
[0090] Настоящее изобретение относится к системе и способу определения местоположения целевого объекта, связанного с рентгеновской системой. Рентгеновская система может включать источник рентгеновского излучения, компонент детектирования, дугу и платформу. Рентгеновская система также может включать по меньшей мере один компонент позиционирования (например, первый компонент позиционирования, второй компонент позиционирования, третий компонент позиционирования). Первый компонент позиционирования может быть выполнен с возможностью определения целевой точки, в которой локализована область интереса (ROI) целевого объекта. Первый компонент позиционирования может включать первый лазерный компонент, выполненный с возможностью испускать первый лазерный луч, и второй лазерный компонент, выполненный с возможностью испускать второй лазерный луч. Первый лазерный луч и второй лазерный луч могут пересекаться у целевой точки. Второй компонент позиционирования может быть выполнен с возможностью определения местоположения целевого объекта. Второй компонент позиционирования может быть расположен между компонентом детектирования и платформой. Третий компонент позиционирования может быть выполнен с возможностью получения информации о местоположении целевого устройства (например, операционного оборудования), связанного с целевым объектом, в режиме реального времени.
[0091] ФИГ. 1 представляет собой принципиальную схему, иллюстрирующую типичную рентгеновскую систему в соответствии с некоторыми вариантами осуществления настоящего изобретения. Рентгеновская система 100 может включать аппарат рентгеновской визуализации 110, обрабатывающее устройство 120, устройство хранения информации 130, терминал 140 и сеть 150. Компоненты рентгеновской системы 100 могут быть соединены друг с другом разными путями. Только в качестве примера, аппарат рентгеновской визуализации 110 может быть присоединен к обрабатывающему устройству 120 через сеть 150. В качестве другого примера, аппарат рентгеновской визуализации 110 может быть присоединен к обрабатывающему устройству 120 напрямую. В качестве еще одного примера, устройство хранения информации 130 может быть присоединено к обрабатывающему устройству 120 напрямую или через сеть 150. В качестве еще одного примера, терминал 140 может быть присоединен к обрабатывающему устройству 120 напрямую или через сеть 150.
[0092] Аппарат рентгеновской визуализации 110 может включать источник рентгеновского излучения 111 (также называемый рентгеновской трубкой), компонент детектирования 112, C-дугу 113 и платформу 114. Источник рентгеновского излучения 111 и компонент детектирования 112 могут быть установлены на C-дуге 113. C-дуга 113 может включать первый конец и второй конец, расположенные напротив друг друга. Например, источник рентгеновского излучения 111 может быть установлен на первом конце C-дуги 113 и компонент детектирования 112 может быть установлен на втором конце C-дуги 113. С другой стороны, источник рентгеновского излучения 111 может быть установлен на втором конце С-дуги 113 и компонент детектирования 112 может быть установлен на первом конце C-дуги 113.
[0093] Платформа 114 может удерживать или поддерживать объект. Объект может представлять собой биологический объект (например, пациента, животное) или небиологический объект (например, сделанный человеком объект). Источник рентгеновского излучения 111 может испускать рентгеновские лучи (также называемые «пучком рентгеновского излучения») в направлении объекта, и рентгеновские лучи могут ослабляться при прохождении через объект. Компонент детектирования 112 может принимать ослабленные рентгеновские лучи, которые проходят через объект и генерировать показания (также называемые данными сканирования), соответствующие принятым рентгеновским лучам. В некоторых вариантах осуществления компонент детектирования 112 может включать сцинтилляционный детектор (например, детектор йодида церия), газовый детектор, круглый детектор, квадратный детектор, дугообразный детектор или т.п., или любую их комбинацию. Компонент детектирования 112 может представлять собой однорядный или многорядный детектор.
[0094] В некоторых вариантах осуществления обрабатывающее устройство 120 может обрабатывать данные, полученные от аппарата рентгеновской визуализации 110, устройства хранения данных 130 или терминала 140. Например, обрабатывающее устройство 120 может получать данные сканирования, относящиеся к объекту. Обрабатывающее устройство 120 может также обрабатывать данные сканирования, чтобы генерировать анатомическое изображение объекта. В качестве другого примера, обрабатывающее устройство 120 может определять целевую точку, где локализована область интереса (ROI) объекта. В качестве еще одного примера, обрабатывающее устройство 120 может оценивать информацию о местоположении целевого устройства (например, операционного оборудования), связанного с объектом, в режиме реального времени.
[0095] Обрабатывающее устройство 120 может включать центральный процессор (CPU), цифровой сигнальный процессор (DSP), систему на кристалле (SoC), узел микроконтроллера (MCU) или т.п., или любую их комбинацию. В некоторых вариантах осуществления обрабатывающее устройство 120 может представлять собой один сервер или группу серверов. Группа серверов может быть централизованной или распределенной. В некоторых вариантах осуществления обрабатывающее устройство 120 может быть местным или удаленным. Например, обрабатывающее устройство 120 может иметь доступ к информации и/или данным, хранящимся в аппарате рентгеновской визуализации 110, устройстве хранения информации 130 и/или терминале 140, через сеть 150. В качестве другого примера, обрабатывающее устройство 120 может быть напрямую подсоединено к аппарату рентгеновской визуализации 110, устройству хранения данных 130 и/или терминалу 140 для доступа к хранящейся информации и/или данным. В некоторых вариантах осуществления обрабатывающее устройство 120 может быть реализовано на облачной платформе. Только в качестве примера, облачная платформа может включать частное облако, публичное облако, гибридное облако, корпоративное облако, распределенное облако, межоблачную среду, многооблачную среду или т.п., или любую их комбинацию.
[0096] Устройство хранения данных 130 может хранить данные и/или команды. В некоторых вариантах осуществления устройство хранения данных 130 может хранить данные, полученные от обрабатывающего устройства 120 и/или терминала 140. В некоторых вариантах осуществления устройство хранения данных 130 может хранить данные и/или команды, которые обрабатывающее устройство 120 может исполнять или использовать для осуществления типичных способов, описанных в настоящем изобретении. В некоторых вариантах осуществления устройство хранения данных 130 может включать запоминающее устройство большого объема, съемный носитель, энергозависимую память для чтения и записи, постоянное запоминающее устройство (ПЗУ (ROM)) или т.п., или любую их комбинацию. Типичное запоминающее устройство большого объема может включать магнитный диск, оптический диск, твердотельный накопитель и др. Типичный съемный носитель может включать флеш-накопитель, гибкий диск, оптический диск, карту памяти, zip-диск, магнитную ленту и др. Типичная энергозависимая память для чтения и записи может включать запоминающее устройство с произвольным доступом (ОЗУ (RAM)). Типичное ОЗУ может включать динамическое ОЗУ (DRAM), синхронно-динамическое ОЗУ с удвоением тактовой частоты шины данных (DDR SDRAM), статическое оперативное запоминающее устройство (SRAM), тиристорную память с произвольным доступом (T-RAM) и оперативную память со сжатием (Z-RAM) и др. Типичное ПЗУ (ROM) может включать программируемое шаблонами ПЗУ (MROM), программируемое ПЗУ (PROM), стираемое программируемое ПЗУ (PEROM), электронно-перепрограммируемое ПЗУ (EEPROM), компакт диск постоянной памяти (CD-ROM) и ПЗУ на универсальном цифровом диске и др. В некоторых вариантах осуществления устройство хранения данных 130 может быть реализовано на облачной платформе. Только в качестве примера, облачная платформа может включать частное облако, общедоступное облако, гибридное облако, корпоративное облако, распределенное облако, межоблачную среду, многооблачную среду и т.п., или любую их комбинацию.
[0097] В некоторых вариантах осуществления устройство хранения данных 130 может быть подсоединено к сети 150 для взаимодействия с одним или несколькими компонентами рентгеновской системы 100 (например, с терминалом 140, обрабатывающим устройством 120). Один или несколько компонентов рентгеновской системы 100 может иметь доступ к данным или командам, хранящимся в устройстве хранения информации 130, через сеть 150. В некоторых вариантах осуществления устройство хранения данных 130 может быть напрямую соединено с или взаимодействует с одним или несколькими компонентами рентгеновской системы 100 (например, с терминалом 140, обрабатывающим устройством 120). В некоторых вариантах осуществления устройство хранения данных 130 может быть частью обрабатывающего устройства 120.
[0098] Терминал 140 включает в себя мобильное устройство 140-1, планшетный компьютер 140-2, портативный компьютер 140-3 или т.п., или любую их комбинацию. В некоторых вариантах осуществления мобильное устройство 140-1 может включать устройство умного дома, носимое устройство, умное мобильное устройство, устройство виртуальной реальности, устройство дополненной реальности или т.п., или любую их комбинацию. В некоторых вариантах осуществления устройство умного дома может включать устройство интеллектуального освещения, устройство управления интеллектуальным электрическим оборудованием, интеллектуальное устройство мониторинга, умное телевидение, умную видеокамеру, устройство внутренней связи или т.п., или любую их комбинацию. В некоторых вариантах осуществления носимое устройство может включать браслет, обувь, очки, шлем, часы, одежду, рюкзак, аксессуар или т.п., или любую их комбинацию. В некоторых вариантах осуществления умное мобильное устройство может включать смартфон, персональный цифровой помощник (PDA), игровое устройство, навигационное устройство, кассовый терминал (POS) или т.п., или любую их комбинацию. В некоторых вариантах осуществления устройство виртуальной реальности и/или устройство дополненной реальности может включать шлем виртуальной реальности, стекло виртуальной реальности, патч виртуальной реальности, шлем дополненной реальности, стекло дополненной реальности, патч дополненной реальности, или т.п., или любую их комбинацию. Например, устройство виртуальной реальности и/или устройство дополненной реальности может включать Google Glass, Oculus Rift, HoloLens, Gear VR и др. В некоторых вариантах осуществления терминал 140 может удаленно управлять аппаратом рентгеновской визуализации 110. В некоторых вариантах осуществления терминал 140 может управлять аппаратом рентгеновской визуализации 110 через беспроводное соединение. В некоторых вариантах осуществления терминал 140 может принимать информацию и/или команды, введенные пользователем, и направлять полученную информацию и/или команды к аппарату рентгеновской визуализации 110 или к обрабатывающему устройству 120 через сеть 150. В некоторых вариантах осуществления терминал 140 может принимать данные и/или команду от обрабатывающего устройства 120. В некоторых вариантах осуществления терминал 140 может быть частью обрабатывающего устройства 120. В некоторых вариантах осуществления терминал 140 может быть опущен.
[0099] Сеть 150 может облегчать обмен командами и/или данными. В некоторых вариантах осуществления один или несколько компонентов рентгеновской системы 100 (например, аппарат рентгеновской визуализации 110, терминал 140, обрабатывающее устройство 120 или устройство хранения данных 130) могут отправлять команду и/или данные к другому(им) компоненту(ам) в рентгеновской системе 100 через сеть 150. В некоторых вариантах осуществления сеть 150 может представлять собой любой тип проводной или беспроводной сети, или их комбинацию. Сеть 150 может представлять собой и/или включать общедоступную сеть (например, the Internet), частную сеть (например, локальную сеть передачи данных (LAN), глобальную компьютерную сеть (WAN)) и др.), проводную сеть (например, Ethernet network), беспроводную сеть (например, сеть 802.11, Wi-Fi сеть), сеть мобильной связи (например, сеть долгосрочного развития (Long Term Evolution (LTE)), сеть frame relay, виртуальную частную сеть («VPN»), спутниковую сеть, сеть телефонной связи, роутеры, концентраторы, коммутаторы, служебные компьютеры и/или любую их комбинацию. Только в качестве примера, сеть 150 может включать кабельную сеть, проводную сеть, волоконно-оптическую сеть, телекоммуникационную сеть, интрасеть, Интернет, локальную сеть (LAN), глобальную сеть (WAN), беспроводную локальную сеть (WLAN), городскую вычилительную сеть (MAN), территориальную высилительную сеть (WAN), общественно коммутируемую телефонную сеть (PSTN), сеть BluetoothTM, сеть ZigBeeTM, сеть ближней бесконтактной связи (NFC), или т.п., или любую их комбинацию. В некоторых вариантах осуществления сеть 150 может включать одну или несколько точек сетевого доступа. Например, сеть 150 может включать точки доступа к проводной или беспроводной сети, такие как базовые станции и/или точки обмена интернет-трафиком, через которые один или несколько компонентов рентгеновской системы 100 могут быть подсоединены к сети 150 для обмена данными и/или командами.
[0100] Следует отметить, что приведенное выше описание рентгеновской системы 100 представлено с целью иллюстрации, и не предназначено для ограничения объема настоящего изобретения. Специалистом в данной области техники могут быть выполнены изменения и модификации в соответствии с указаниями настоящего изобретения. Однако такие изменения и модификации не будут отклоняться от объема настоящего изобретения. Например, рентгеновская система 100 может включать любые другие формы дуги, например, G-дугу и др.
[0101] ФИГ. 2 представляет собой принципиальную схему, иллюстрирующую типичные компоненты аппаратного и/или программного обеспечения для типичного компьютерного устройства 200, на которых обрабатывающее устройство 120 может быть реализовано в соответствии с некоторыми вариантами осуществления настоящего изобретения. Как показано на ФИГ. 2, вычислительное устройство 200 может включать процессор 210, систему хранения данных 220, ввод/вывод (I/O) 230 и коммуникационный порт 240.
[0102] Процессор 210 может исполнять команды компьютера (код программы) и выполнять функции обрабатывающего устройства 120 в соответствии с описанными здесь методами. Команды компьютера могут включать, например, стандартные программы, программы, объекты, компоненты, сигналы, структуры данных, процедуры, модули и функции, которые осуществляют конкретные функции, описанные здесь. Например, процессор 210 может обрабатывать данные, полученные от аппарата рентгеновской визуализации 110, терминала 140, устройства хранения информации 130 и/или любых других компонентов системы МРТ (MRI) 100. Более конкретно, процессор 210 может обрабатывать один или несколько наборов экспериментальных данных, полученных от аппарата рентгеновской визуализации 110. Например, процессор 210 может осуществлять одномерную (1D) коррекцию или двумерную коррекцию (2D) набора(ов) экспериментальных данных. Процессор 210 может реконструировать изображение на основании набора(ов) экспериментальных данных. В некоторых вариантах осуществления реконструированное изображение может быть сохранено в устройстве хранения информации 130, системе хранения данных 220 и др. В некоторых вариантах осуществления реконструированное изображение может быть отображено на устройстве отображения с помощью I/O 230. В некоторых вариантах осуществления процессор 210 может исполнять команды, полученные от терминала 140. В некоторых вариантах осуществления процессор 210 может включать один или несколько аппаратных процессоров, таких как микроконтроллер, микропроцессор, компьютер с сокращенным набором команд (RISC), специализированные интегральные схемы (ASICs), проблемно-ориентированные процессоры (ASIP), центральный процессор (CPU), графический процессор (GPU), узел обработки физики (PPU), узел микроконтроллера, цифровой сигнальный процессор (DSP), программируемая вентильная матрица (FPGA), продвинутый RISC-процессор (ARM), программируемое логическое устройство (PLD), любой канал двусторонней связи или процессор, способный исполнять одну или несколько функций или т.п., или любые их комбинации.
[0103] Исключительно в целях иллюстрации только один процессор описан в вычислительном устройстве 200. Однако следует отметить, что вычислительное устройство 200 в настоящем изобретении также может включать множество процессоров, следовательно, операции и/или этапы способа, которые осуществляют с помощью одного процессора, как описано в настоящем изобретении, также могут быть совместно выполнены или отдельно выполнены с помощью множества процессоров. Например, если в настоящем изобретении процессор вычислительного устройства 200 исполняет как процесс A, так и процесс B, следует понимать, что процесс A и процесс B могут быть выполнены двумя или несколькими разными процессорами совместно или отдельно в вычислительном устройстве 200 (например, первый процессор исполняет процесс A и второй процессор исполняет процесс B, или первый и второй процессоры совместно выполняют процессы A и B).
[0104] Система хранения данных 220 может хранить данные/информацию, полученные от аппарата рентгеновской визуализации 110, терминала 140, устройства хранения информации 130 или любого другого компонента системы МРТ 100. В некоторых вариантах осуществления система хранения данных 220 может включать запоминающее устройство большого объема, съемное запоминающее устройство, энергозависимую память для чтения и записи, постоянное запоминающее устройство (ROM) или т.п., или любую их комбинацию. Например, запоминающее устройство большого объема может включать магнитный диск, оптический диск, твердотельный накопитель и др. Съемное запоминающее устройство может включать флеш-накопитель, гибкий диск, оптический диск, карту памяти, zip-диск, магнитную ленту и др. Энергозависимая память для чтения и записи может включать оперативную память (ОЗУ (RAM)). ОЗУ может включать динамическое ОЗУ (DRAM), динамическое ОЗУ с удвоением тактовой частоты шины данных (DDR SDRAM), статическое ОЗУ (SRAM), тиристорную память с произвольным доступом (T-RAM), ОЗУ со сжатием (Z-RAM) и др. ОЗУ может включать программируемое шаблоном ПЗУ (MROM), программируемое ПЗУ (PROM), стираемое программируемое ПЗУ (PEROM), электронно-перепрограммируемое ПЗУ (EEPROM), компакт-диск постоянной памяти (CD-ROM) и ПЗУ на универсальном цифровом диске и др. В некоторых вариантах осуществления система хранения данных 220 может хранить одну или несколько программ и/или команд для осуществления типичных способов, описанных в настоящем изобретении. Например, система хранения данных 220 может хранить программу для обрабатывающего устройства 120 для уменьшения или удаления одного или более визуальных искажений в изображении.
[0105] «I/O» 230 может водить или выводить сигналы, данные и/или информацию. В некоторых вариантах осуществления «I/O» 230 может обеспечивать взаимодействие пользователя с обрабатывающим устройством 120. В некоторых вариантах осуществления «I/O» 230 может включать устройство ввода и устройство вывода. Типичные устройства ввода могут включать клавиатуру, мышь, сенсорный экран, микрофон или т.п., или их комбинацию. Типичные устройства вывода могут включать дисплейное устройство, громкоговоритель, принтер, проектор или т.п., или их комбинацию. Типичные дисплейные устройства могут включать жидкокристаллический дисплей (LCD), дисплей на основе светодиодов (LED), плоско-панельный дисплей, изогнутый дисплей, телевизионное устройство, электронно-лучевую трубку (CRT) или т.п., или их комбинацию.
[0106] Коммуникационный порт 240 может быть соединен с сетью (например, сетью 150) для облегчения передачи данных. Коммуникационный порт 240 может устанавливать соединения между обрабатывающим устройством 120 и аппаратом рентгеновской визуализации 110, терминалом 140 или устройством хранения данных 130. Соединение может быть проводным соединением, беспроводным соединением или комбинацией обоих, которое обеспечивает передачу и прием данных. Проводное соединение может включать электрический кабель, оптический кабель, телефонный кабель или т.п., или любую их комбинацию. Беспроводное соединение может включать Bluetooth, Wi-Fi, WiMax, WLAN, ZigBee, мобильную сеть (например, 3G, 4G, 5G и др.) или т.п., или их комбинацию. В некоторых вариантах осуществления коммуникационный порт 240 может представлять собой унифицированный коммуникационный порт, такой как RS232, RS485 и др. В некоторых вариантах осуществления коммуникационный порт 240 может представлять собой специально разработанный коммуникационный порт. Например, коммуникационный порт 240 может быть спроектирован в соответствии со «Стандартом цифрового изображения и коммуникации в медицине» (DICOM).
[0107] ФИГ. 3 представляет собой принципиальную схему, иллюстрирующую типичные компоненты аппаратного и/или программного обеспечения типичного мобильного устройства 300 в соответствии с некоторыми вариантами осуществления настоящего изобретения. Как проиллюстрировано на ФИГ. 3, мобильное устройство 300 может включать коммуникационную платформу 310, дисплей 320, графический процессор (GPU) 330, центральный процессор (CPU) 340, «I/O» 350, память 360 и систему хранения данных 390. В некоторых вариантах осуществления любой другой подходящий компонент, включая, но без ограничения, системную шину или микроконтроллер (не показаны), также могут быть включены в мобильное устройство 300. В некоторых вариантах осуществления мобильная операционная система 370 (например, iOS, Android, Windows Phone и др.) и одна или несколько информационных систем 380 могут быть загружены в память 360 из системы хранения данных 390 для исполнения CPU 340. Информационные системы 380 могут включать браузер или любые другие подходящие мобильные приложения для приема и отображения информации, относящиеся к обработке изображения, или другой информации от обрабатывающего устройства 120. Взаимодействие пользователя с информационным потоком может быть достигнуто через «I/O» 350 и представлено обрабатывающему устройству 120 и/или другим компонентам системы МРТ 100 через сеть 150.
[0108] Для реализации разнообразных модулей, узлов и их функциональных возможностей, описанных в настоящем изобретении, могут быть использованы компьютерные аппаратные платформы в качестве аппаратных платформ для одного или нескольких элементов, описанных здесь. Аппаратные элементы, операционные системы и языки программирования таких компьютеров являются традиционными по своему характеру, и полагают, что специалист в данной области техники достаточно знаком с ними, чтобы адаптировать эти технологии для генерирования изображения с уменьшенным артефактом Найквиста в виде паразитного изображения, как описано в изобретении. Компьютер с элементами пользовательского интерфейса может быть использован для реализации персонального компьютера (ПК (PC)) или другого типа рабочей станции или терминального устройства, хотя компьютер также может действовать как сервер, если он запрограммирован соответствующим образом. Полагают, что специалист в данной области техники знаком со структурой, программированием и общей работой такого компьютерного оборудования и, как результат, чертежи должны быть понятны без разъяснений.
[0109] ФИГ. 4 представляет собой принципиальную схему, иллюстрирующую типичную рентгеновскую систему во фронтальном положении, а ФИГ. 5 представляет собой принципиальную схему, иллюстрирующую типичную рентгеновскую систему в боковом положении, в соответствии с некоторыми вариантами осуществления настоящего изобретения. Рентгеновская система 400 может включать C-дугу 410, источник рентгеновского излучения 411, компонент детектирования 412 и платформу (не показано). Источник рентгеновского излучения 411 может быть выполнен с возможностью испускать рентгеновские лучи в направлении целевого объекта. Компонент детектирования 412 может быть выполнен с возможностью принимать по меньшей мере часть рентгеновских лучей, прошедших через целевой объект. Платформа может быть выполнена с возможностью размещения целевого объекта, и платформа может быть размещена между источником рентгеновского излучения 411 и компонентом детектирования 412. C-дуга 410 может быть выполнена с возможностью поддерживать компонент детектирования 412 и источник рентгеновского излучения 411.
[0110] C-дуга 410 может быть неизоцентрической. C-дуга 410 может быть выполнена с возможностью по меньшей мере двух перспектив (например, первая перспектива, вторая перспектива). C-дуга 410 может быть повернута от одной перспективы к другой перспективе вокруг центра C-дуги 410. Рентгеновская система 400 может быть выполнена с возможностью определения анатомического изображения с каждого ракурса путем сканирования по меньшей мере части целевого объекта. Анатомическое изображение может показывать состояние здоровья области интереса (ROI) 440 целевого объекта. Рентгеновская система 400 также может включать первый компонент позиционирования. Первый компонент позиционирования может быть выполнен с возможностью определения целевой точки, где локализована ROI 440 целевого объекта, при этом помещают центр ROI 440 у целевой точки или около нее перед сканированием и затем получают анатомическое изображение, на котором ROI 440 находится около центра или в центре. Более конкретно, первый компонент позиционирования может быть выполнен с возможностью упрощения процесса определения местоположения ROI 440 по меньшей мере на двух перспективах.
[0111] Первый компонент позиционирования может включать первый лазерный компонент 420 и второй лазерный компонент 430. Первый лазерный компонент 420 может быть смонтирован на источнике рентгеновского излучения 411 или на компоненте детектирования 412. Первый лазерный компонент 420 может быть выполнен с возможностью испускать первый лазерный луч 422. Путь распространения первого лазерного луча 422 может совпадать с рентгеновскими лучами, испускаемыми источником рентгеновского излучения 411, за счет регулирования места установки и/или угла испускания первого лазерного компонента 420. Следовательно, первый лазерный луч 422 может быть выполнен с возможностью распознавания пути распространения рентгеновских лучей, испускаемых источником рентгеновского излучения 411. Второй лазерный компонент 430 может быть установлен на внутренней позиции C-дуги 410. Второй лазерный компонент 430 может быть выполнен с возможностью испускать второй лазерный луч 432. Второй лазерный луч 432 и первый лазерный луч 422 могут пересеаться в точке, и эта точка может представлять собой целевую точку, в которой локализована ROI 440 целевого объекта перед сканированием. Следовательно, ROI 440 может находиться рядом с центром или в центре анатомических изображений, определенных на первой перспективе и второй перспективе.
[0112] Конфигурация первого компонента позиционирования (например, первого лазерного компонента 420 и второго лазерного компонента 430) может облегчать обнаружение целевой точки, где локализована ROI 440 целевого объекта, на основании первого лазерного луча 422 и второго лазерного луча 432 вместо испускания многократно рентгеновских лучей для получения анатомических изображений целевых объектов и регулирования положений C-дуги 410 на основании полученных анатомических изображений. Когда ROI 440 целевого объекта локализована у целевой точки, ROI 440 может находиться около центров или в центах анатомических изображений, полученных на первой перспективе и второй перспективе, и, следовательно, ROI 440, находящаяся вне анатомического изображения, или ROI 440, лежащая в положении, которое не находится рядом с центром анатомического изображения, может быть исключена.
[0113] В некоторых вариантах осуществления угол между первым лазерным лучом 422 и вторым лазерным лучом 432 может быть равен углу между первой перспективой и второй перспективой, так что рентгеновские лучи могут проходить через центр (например, точку F, показанную на ФИГ. 4 и 5) ROI 440. Например, угол может составлять 90°. Так как путь распространения второго лазерного луча 432 на первой перспективе может совпадать с путем распространения рентгеновских лучей (или первого лазерного луча 422) на второй перспективе, и расстояние от конца C-дуги 410 до центра вращения (например, точки O) может оставаться одним и тем же, расстояние от центра вращения до первого лазерного луча 422 может быть равно расстоянию от центра вращения до второго лазерного луча 432, что может улучшать точность определения целевой точки, где локализована ROI 440 целевого объекта.
[0114] В некоторых вариантах осуществления C-дуга 410 может быть повернута в направлении множества перспектив. Множество вторых лазерных компонентов 430 может быть установлено вдоль внутренней стороны C-дуги 410. Каждый второй лазерный компонент 430 может соответствовать двум перспективам. Перед сканированием оператор (например, врач) может выбрать две перспективы из множества перспектив на основании практических требований. Оператор может выбрать второй лазерный компонент 430, соответствующий первому лазерному компоненту 420, из множества вторых лазерных компонентов 430 на основании двух перспектив. Целевая точка, где локализована ROI 440 целевого объекта, может быть определена на основании первого лазерного компонента 420 и выбранного второго лазерного компонента 430. Следовательно, после определения анатомического изображения на первой перспективе C-дуга 410 может быть повернута непосредственно ко второй перспективе для определения анатомического изображения на второй перспективе без какого-либо другой настройки местоположений, что в результате облегчает процесс определения целевой точки по меньшей мере для двух перспектив.
[0115] Как показано на ФИГ. 4 рентгеновская система 400 может находиться во фронтальном положении, C-дуга 410 может находиться в вертикальной позиции, и компонент детектирования 412 может быть на верхнем конце C-дуги 410. Источник рентгеновского излучения 411 может быть на нижнем конце C-дуги 410. Как показано на ФИГ. 5, рентгеновская система 400 может находиться в боковом положении, и C-дуга 410 может быть в горизонтальной позиции. Компонент детектирования 412 может находиться на левом конце C-дуги 410, и источник рентгеновского излучения 411 может находится на правом конце C-дуги 410. В некоторых вариантах осуществления рентгеновские лучи, испускаемые рентгеновской системой 400, могут представлять собой конический пучок. Первый пучок рентгеновского излучения, испускаемый источником рентгеновского излучения 411, когда C-дуга 410 находится во фронтальном положении, и второй пучок рентгеновского излучения, испускаемый источником рентгеновского излучения 411, когда C-дуга 410 находится в боковом положении, могут иметь область перечения. Следовательно, когда точка пересечения первого лазерного луча 422, излучаемого первым лазерным компонентом, 420, и второго лазерного луча 432 излучаемого вторым лазерным компонентом 430, находится в пределах области пересечения, это пересечение может быть обозначено как целевая точка, где локализована ROI 440 целевого объекта.
[0116] В некоторых вариантах осуществления первая центральная ось первого пучка рентгеновского излучения и вторая центральная ось второго пучка рентгеновского излучения могут пересекаться в точке (например, точка E, как показано на ФИГ. 4 и 5). Это точка может быть обозначена как целевая точка. Если ROI 440 целевого объекта находится у целевой точки, ROI 440 может находиться у центра фронтального изображения или бокового изображения. В некоторых вариантах осуществления один из первого лазерного луча 422 и второго лазерного луча 432 может иметь форму креста, и другой луч может иметь форму щели. Следовательно, две плоскости, определяемые лазерным лучом с формой креста, и плоскость, определяемая лазерным лучом с формой щели, могут пересекаться у целевой точки. Рентгеновская система 400, описанная выше, может делать локализацию целевой точки более точной и наблюдение более удобным, в результате чего исключает нежелательное облучение в направлении целевого объекта и улучшает эффективность работы оператора (например, врача).
[0117] В некоторых вариантах осуществления лазерный луч (например, первый лазерный луч 422, второй лазерный луч 432) с формой креста может быть испущен перекрестным лазерным генератором или двумя перпендикулярными щелевыми лазерными генераторами. В некоторых вариантах осуществления первый лазерный компонент 420 может включать два щелевых лазерных генератора, выполненных с возможностью испускать лазерный луч с формой креста, и два щелевых лазерных генератора могут быть установлены на наружной стороне компонента детектирования 412 соответственно. Второй лазерный компонент 430 может включать щелевой лазерный генератор, выполненный с возможностью испускать лазерный луч с формой щели. В некоторых вариантах осуществления первый лазерный компонент 420 и второй лазерный компонент 430 могут представлять собой точечные лазерные генераторы, каждый лазерный луч которого представляет собой прямую линию. Целевая точка может быть определена на основании пересечения двух прямых линий. Структура рентгеновской системы, описанной выше, может быть проще, точность определения местоположения целевой точки, определенной рентгеновской системой, может быть ниже относительно рентгеновской системы, включающей в себя перекрестный лазерный генератор или два перпендикулярных щелевых лазерных генератора. В некоторых вариантах осуществления конфигурация первого лазерного компонента 420 и второго лазерного компонента 430 может давать первую линию пересечения, связанную с первым лазерным компонентом 420, около центра пучка рентгеновского излучения или совпадающую ним, когда C-дуга 410 находится во фронтальном положении. Сектор, испускаемый лазерным генератором в плоскости XOY, и сектор, испускаемый лазерным генератором в плоскости ZOY, могут пересекаться на первой линии пересечения. Мало того, сектор, испускаемый лазерным генератором второго лазерного компонента 430 в плоскости XOY, может включать точку E и вторую линию пересечения между точкой E и точкой пересечения C-дуги 410 вдоль X-оси.
[0118] В некоторых вариантах осуществления рентгеновская система 400 может включать первый компонент позиционирования, описанный выше, устройство детектирования положения и подсказывающее устройство (не показано ФИГ. 4 и 5). Устройство детектирования положения может быть установлено на C-дуге 410 и выполнено с возможностью определения угла поворота C-дуги 410. Подсказывающее устройство может быть установлено на устройстве детектирования положения и выполнено с возможностью подсказывать угол поворота. Например, при обнаружении, что C-дуга 410 повернута во фронтальное положение или боковое положение, устройство детектирования положения может определять положение C-дуги 410, и передавать информацию о положении микроконтроллеру. Микроконтроллер может управлять подсказывающим устройством, чтобы генерировать сигнал, подсказывающий, что C-дуга 410 находится в соответствующих положениях, исключая таким образом чрезмерное вращение C-дуги 410. Более того, первый лазерный компонент 420 и второй лазерный компонент 430 могут представлять собой лазерные генераторы, например, лазерные излучения, в результате чего упрощаются рентгеновская система 400 и операции, а также снижаются затраты.
[0119] ФИГ. 6 представляет собой принципиальную схему, иллюстрирующую типичный путь распространения пучка рентгеновского излучения, испускаемого источником рентгеновского излучения, и типичный путь распространения первого лазерного луча, испускаемого первым лазерным компонентом, в соответствии с некоторыми вариантами осуществления.
[0120] Как показано на ФИГ. 6, источник рентгеновского излучения 411 может включать рентгеновский компонент 411-1 и лазерный компонент управления 411-2. Рентгеновский компонент 411-1 может быть выполнен с возможностью испускать рентгеновские лучи в направлении целевого объекта. Лазерный компонент управления 411-2 может находиться под рентгеновским компонентом 411-1. Лазерный компонент управления 411-2 может включать отражатель 411-3 и первый лазерный компонент 420. Отражатель 411-3 может быть наклонен, и первый лазерный компонент 420 может быть расположен на одной стороне отражателя 411-3. Рентгеновские лучи, испускаемые рентгеновским компонентом 411-1, могут проходить через заднюю поверхность отражателя 411-3, следовательно, путь распространения рентгеновских лучей, испускаемых рентгеновским компонентом 411-1, может быть таким же, как путь распространения рентгеновских лучей после отражения отражателем 411-3. Первый лазерный луч 422, испускаемый первым лазерным компонентом 420, может проходить через переднюю поверхность отражателя 411-3, следовательно, путь распространения первого лазерного луча 422, испускаемого первым лазерным компонентом 420, может отличаться от пути распространения лазерного луча 422 после отражения отражателем 411-3, и путь распространения лазерного луча 422 после отражения отражателем 411-3 может совпадать с путем распространения рентгеновских лучей, испускаемых рентгеновским компонентом 411-1. Структура источника рентгеновского излучения 411, описанная выше, может гарантировать, что путь распространения лазера после отражения отражателем 411-3 может совпадать с путем распространения рентгеновских лучей, испускаемых рентгеновским компонентом 411-1, и исключать размещение первого лазерного компонента 420 под рентгеновским компонентом 411-1, что может вызывать перекрывание части рентгеновских лучей.
[0121] В некоторых вариантах осуществления первый лазерный компонент 420 может быть установлен на компоненте детектирования 412, например, на внешней стороне компонента детектирования 412, тем самым исключая влияние на визуализацию компонента детектирования 412 и упрощая конструкцию и установку первого лазерного компонента 420.
[0122] ФИГ. 7 представляет собой схему последовательности операций, иллюстрирующую процесс определения целевой точки, где локализована область интереса (ROI) целевого объекта, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0123] В блоке 710 C-дуга (например, C-дуга 410) может быть повернута во фронтальное положение. Фронтальное положение может соответствовать первой перспективе. Первая перспектива может быть выбрана в соответствии с практическим требованием, связанным с ROI (например, ROI 440, описанной выше) целевого объекта.
[0124] В блоке 720 могут быть инициированы первый лазерный компонент (например, первый лазерный компонент 420, описанный выше) и второй лазерный компонент (например, второй лазерный компонент 430, описанный выше). Первый лазерный компонент может испускать первый лазерный луч (например, первый лазерный луч 422, описанный выше). Второй лазерный компонент может испускать второй лазерный луч (например, второй лазерный луч 432, описанный выше).
[0125] Целевая точка может быть определена на основании пересечения между первым лазерным лучом, испускаемым первым лазерным компонентом, и втором лазерным лучом, испускаемым вторым лазерным компонентом. Область интереса (ROI) целевого объекта может быть помещена у целевой точки. Затем может быть получено анатомическое изображение ROI относительно первой перспективы.
[0126] В некоторых вариантах осуществления C-дуга может быть повернута ко второй перспективе, отличной от первой перспективы. Область интереса (ROI) целевого объекта может быть также помещена у целевой точки. Затем может быть получено анатомическое изображение ROI относительно второй перспективы.
[0127] Анатомические изображения ROI относительно первой перспективы и второй перспективы могут быть получены единовременно, и ROI может быть рядом с центром или в центре анатомических изображений, следовательно, оператору может не потребоваться настраивать C-дугу, время сканирования может быть сокращено, целевой объект (например, пациент) может избежать нежелательного облучения, а эффективность работы оператора может быть улучшена.
[0128] В предшествующем уровне техники рентгеновская система может быть выполнена с возможностью сканирования целевого объекта, а затем получения анатомического изображения целевого объекта. Анатомическое изображение может показывать состояние здоровья целевого объекта, и анатомическое изображение может быть использовано, чтобы помочь при проведении хирургической операции. Рентгеновская система обычно не может осуществлять навигацию при хирургической операции, и, следовательно, дополнительное навигационное устройство может быть необходимо, чтобы помогать оператору осуществлять навигацию хирургической операции (например, хирургического ножа, места, где проводят хирургическое вмешательство). В этом случае оператор может определять местоположение хирургического ножа и/или положение, где проводят хирургическое вмешательство, путем многократного сканирования, которое может приводить к относительно большому количеству радиации для оператора и целевого объекта и быть вредным для них. ФИГ. 8 и 9 представляют собой принципиальные схемы, иллюстрирующие типичную рентгеновскую систему в соответствии с некоторыми вариантами осуществления настоящего изобретения. Рентгеновская система 800 может осуществлять навигацию хирургической операции. Рентгеновская система 800 может включать компонент детектирования 810, источник рентгеновского излучения 820, C-дугу 830 и третий компонент позиционирования 840. Источник рентгеновского излучения 820 может быть выполнен с возможностью испускать рентгеновские лучи в направлении целевого объекта. Компонент детектирования 810 может быть выполнен с возможностью принимать по меньшей мере часть рентгеновских лучей, прошедших через целевой объект. C-дуга 830 может быть выполнена с возможностью поддерживать компонент детектирования 810 и источник рентгеновского излучения 820.
[0129] Третий компонент позиционирования 840 выполнен с возможностью получать информацию о положении целевого устройства, связанного с целевым объектом, в режиме реального времени. Целевое устройство может включать хирургическое оборудование, например, хирургический нож. Третий компонент позиционирования 840 может включать по меньшей мере два детектора позиционирования 841.
[0130] Третий компонент позиционирования 840 может быть интегрирован в рентгеновскую систему 800. Следует отметить, что третий компонент позиционирования 840 может быть интегрирован в положение рентгеновской системы, из которого можно управлять хирургической операцией целевого объекта. Третий компонент позиционирования 840 может направлять информацию о местоположении целевого устройства на станцию обработки изображений (например, обрабатывающее устройство 120). Станция обработки изображений может виртуально изображать информацию о местоположении целевого устройства на анатомическом изображении, в результате чего проводя навигацию хирургической операции и направляя оператора при проведении хирургической операции.
[0131] Третий компонент позиционирования 840 может включать по меньшей мере два детектора позиционирования (например, детектор позиционирования 841, как показано на ФИГ. 10 и 11). Детекторы позиционирования могут включать различные виды детекторов позиционирования. Например, детекторы позиционирования могут включать оптические детекторы позиционирования, например, инфракрасные детекторы. Приняв операционное оборудование за целевое устройство, когда детекторы позиционирования представляют собой инфракрасный детектор, операционное оборудование может иметь инфракрасный источник, согласованный с инфракрасным детектором, операционное оборудование, в дополнение или альтернативно, может иметь отражатель, который может пассивно отражать инфракрасные лучи. Инфракрасные лучи, испущенные или отраженные операционным оборудованием, могут быть собраны инфракрасным детектором, что в результате дает информацию о местоположении инфракрасного источника или отражателя операционного оборудования в режиме реального времени. В некоторых вариантах осуществления длина операционного оборудования, относительное положение конца операционного оборудования и инфракрасного источника или отражателя могут быть определены заранее, что в результате определяет местоположение операционного оборудования и направляет хирургическое вмешательство. В некоторых вариантах осуществления на конце операционного оборудования может быть установлен локатор. Локатор может включать по меньшей мере три шара, излучающие инфракрасное излучение, или по меньшей мере три шара, отражающие инфракрасное излучения. Детекторы позиционирования (например, камеры) могут отслеживать местоположения по меньшей мере трех шаров, излучающих инфракрасное излучение, или по меньшей мере трех шаров, отражающих инфракрасное отражение, в результате определяя относительное положение конца операционного оборудования.
[0132] В некоторых вариантах осуществления детектор позиционирования может также включать лазерные детекторы позиционирования, высокоточные камеры и др. В некоторых вариантах осуществления детектор позиционирования может включать неоптические детекторы позиционирования, например, датчики магнитного поля. Датчик магнитного поля может быть установлен на целевом устройстве. Источник магнитного поля может генерировать магнитное поле, а датчик магнитного поля может принимать сигнал, испускаемый источником магнитного поля, тем самым обнаруживая местоположение и пространственное расположение и позицию датчика магнитного поля.
[0133] В некоторых вариантах осуществления третий компонент позиционирования 840 может быть установлен по меньшей мере на одном месте рентгеновской системы 800. В некоторых вариантах осуществления, как показано на ФИГ. 8, третий компонент позиционирования 840 может быть установлен на компоненте детектирования 810. Например, третий компонент 400 может быть установлен на конце компонента детектирования 810.
[0134] В некоторых вариантах осуществления, как показано на ФИГ. 9, третий компонент позиционирования 840 может быть смонтирован на источнике рентгеновского излучения 820. Например, третий компонент 400 может быть установлен на конце источника рентгеновского излучения 820.
[0135] В некоторых вариантах осуществления третий компонент позиционирования 840 может быть установлен на C-дуге 830 рентгеновской системы 800. C-дугу 830 можно поворачивать вдоль разных осей вращения, в результате сканируя целевой объект с разных ракурсов. В определенном варианте осуществления третий компонент позиционирования 840 может быть установлен на месте, которое находится относительно близко к концу C-дуги 830, и это место может быть на верхней стороне платформы, так что третий компонент позиционирования 840 может осуществлять навигацию хирургического вмешательства.
[0136] Пространство для установки детекторов позиционирования может быть ограничено и расстояние между разными детекторами позиционирования может быть небольшим, что приводит к неточности локализации операционного оборудования. В некоторых вариантах осуществления по меньшей мере два детектора позиционирования могут иметь возможность перемещаться, чтобы регулировать по меньшей мере два расстояния между по меньшей мере двумя детекторами позиционирования, что в результате гарантирует точную навигацию хирургической операции.
[0137] По меньшей мере, два расстояния между по меньшей мере двумя детектора позиционирования может быть настроено с помощью различных структур. ФИГ. 10 и 11 представляют собой принципиальные схемы, иллюстрирующие пример третьего компонента позиционирования в соответствии с некоторыми вариантами осуществления настоящего изобретения. Как показано на ФИГ. 10 и 11, третий компонент позиционирования 840 может включать по меньшей мере один стержень с возвратно-поступательным движением 842. Конец каждого из по меньшей мере одного стержня с возвратно-поступательным движением 842 может быть установлен, например, на C-дуге 830. Один детектор позиционирования из детекторов позиционирования 841 может быть установлен на конце, который находится относительно далеко, например, от C-дуги 830, одного стержня с возвратно-поступательным движением из по меньшей мере одного стержня с возвратно-поступательным движением 842.
[0138] В некоторых вариантах осуществления количество по меньшей мере одного стержня с возвратно-поступательным движением 842 может быть 1, 2 или больше. Например, если количество детекторов позиционирования 841 равно 2, а расстояние между двумя детекторами позиционирования 841 необходимо настроить, один из двух детекторов позиционирования 841 может быть установлен на позиции рентгеновской системы относительно далеко от позиции рентгеновской системы 800, и другой из двух детекторов позиционирования 841 может быть установлен на позиции рентгеновской системы, тем самым настраивая расстояние между двумя детекторами позиционирования 841. В дополнение или альтернативно, количество по меньшей мере одного стержня с возвратно-поступательным движением 842 может равняться 2, и два детектора позиционирования 841 могут быть установлены на конце, который находится далеко от положения стержня с возвратно-поступательным движением 842, в результате чего настраивают расстояние между двумя детекторам позиционирования 841 с помощью двух стержней с возвратно-поступательным движением 842.
[0139] В некоторых вариантах осуществления количество по меньшей мере одного стержня с возвратно-поступательным движением 842 может равняться числу детекторов позиционирования 841, что в результате делает настойку, по меньшей мере, одного расстояния между детекторами позиционирования 841 более гибкой.
[0140] В некоторых вариантах осуществления конец стержня(ей) с возвратно-поступательным движением 842 может быть непосредственно зафиксирован на позиции рентгеновской системы 100. Например, конец стержня(ей) с возвратно-поступательным движением 842 может быть непосредственно закреплен на компоненте детектирования 810, источнике рентгеновского излучения 820 или C-дуге 830.
[0141] В некоторых вариантах осуществления количество детекторов позиционирования 841 может равняться 3, и количество соответствующих возвратно-поступательных стержней 842 также может быть 3. Три возвратно-поступательных стержня 842 могут быть закреплены в совокупности с помощью кольцевого держателя. Три возвратно-поступательных стержня 842 могут быть установлены вдоль края кольцевого держателя, и каждый из трех возвратно-поступательных стержней 842 может простираться вдоль плоскости кольцевого держателя. Конец каждого из возвратно-поступательных стержней 842 может быть присоединен к кольцевому держателю. Три детектора позиционирования 841 могут быть установлены на другом конце каждого из трех возвратно-поступательных стержней 842. Кольцевой держатель может быть смонтирован на внешней периферии компонента детектирования 810, внешней периферии источника рентгеновского излучения 820 или внешней периферии C-дуги 830.
[0142] В некоторых вариантах осуществления стержень(и) с возвратно-поступательным движением 842 может/могут быть закреплен(ы) в целом с помощью основания. Когда количество детекторов позиционирования 841 равно 2, количество соответствующих стержней с возвратно-поступательным движением 842 может быть 2. Два стержня с возвратно-поступательным движением 842 могут быть расположены в форме щели, форме T, форме креста. Конец каждого из двух стержней с возвратно-поступательным движением 842 может быть соединен с основанием. Два детектора позиционирования 841 могут быть установлены на другом конце каждого из стержней с возвратно-поступательным движением 842. Основание может быть установлено на наружной поверхности кожуха компонента детектирования 810 или на внутренней поверхности кожуха компонента детектирования 810. Основание также может быть смонтировано на наружной поверхности кожуха компонента детектирования 810 или внутренней поверхности кожуха источника рентгеновского излучения 820. Основание также может быть установлено на C-дуге 830.
[0143] Когда расстояние между детекторами позиционирования 841 необходимо настроить, можно регулировать возвратно-поступательную длину стержня(ей) с возвратно-поступательным движением 842, настраивая в результате расстояние между двумя детекторами позиционирования 841.
[0144] В некоторых вариантах осуществления стержень(и) с возвратно-поступательным движением 842 может/могут включать, по меньшей мере, один электрический стержень с возвратно-поступательным движением, тем самым автоматически регулируя расстояния между детекторами позиционирования 841. В некоторых вариантах осуществления, по меньшей мере, один электрический стержень с возвратно-поступательным движением может быть снабжен, по меньшей мере, одним кодером, чтобы контролировать настройку расстояний в режиме реального времени.
[0145] В некоторых вариантах осуществления детектор позиционирования 841 может включать, по меньшей мере, одну рельсовую направляющую. По меньшей мере, два из детекторов позиционирования 841 могут скользить, по меньшей мере, по одной рельсовой направляющей.
[0146] В некоторых вариантах осуществления, по меньшей мере, одна рельсовая направляющая может быть установлена на компоненте детектирования 810, источнике рентгеновского излучения 820 или C-дуге 830. Каждая, по меньшей мере, из одной рельсовой направляющей может иметь форму щели, форму буквы T, форму креста и др., по меньшей мере, два из детекторов позиционирования 841 могут скользить, по меньшей мере, по одной рельсовой направляющей, тем самым настраивая расстояния между детекторами позиционирования 841 на основании практической потребности. Следовательно, точность навигации может быть улучшена. В некоторых вариантах осуществления каждая, по меньшей мере, из одной рельсовой направляющей может включать структуру желоба, структуру каретки.
[0147] В некоторых вариантах осуществления рельсовая направляющая может включать рельсовую направляющую возвратно-поступательного движения. Следовательно, диапазон для настойки расстояний между детекторами позиционирования 841 может быть увеличен и площадь рельсовой направляющей может быть уменьшена, например, с помощью структуры рельсового пути с возвратно-поступательным движением.
[0148] Третий компонент позиционирования 840 может быть непосредственно интегрирован в рентгеновскую систему в настоящем изобретении, в результате чего размещение дополнительной тележки для навигации в операционной исключается и экономится пространство операционной. Когда рентгеновскую систему 800 используют для навигации, вначале может быть получено анатомическое изображение целевого объекта, и информация о местоположении целевого объекта может быть наложена и отображена на анатомическом изображении с целью навигации.
[0149] В предшествующем уровне техники может требоваться регистрация рентгеновской системы. Три точки, по меньшей мере, на одном плоском детекторе рентгеновской системы могут быть определены с помощью позиционирующего штифта, и дополнительное навигационное устройство может собирать данные о пространственном местоположении плоского детектора, тем самым регистрируя дополнительное навигационное устройство в рентгеновской системе. В настоящем изобретении третий компонент позиционирования 840 может быть встроен в рентгеновскую систему 800, и, следовательно, информация о местоположении рентгеновской системы 800, определяемом третьим компонентом позиционирования 840, и анатомическое изображение могут иметь относительно высокую совместимость и степень соответствия. Помимо этого, передача изображения является относительно быстрой, что в результате эффективно улучшает точность навигации.
[0150] ФИГ. 12 представляет собой принципиальную схему, иллюстрирующую типичную рентгеновскую систему, и ФИГ. 13 представляет собой принципиальную схему, иллюстрирующую типичный путь распространения пучка рентгеновского излучения, испускаемого источником рентгеновского излучения, и типичный путь распространения первого лазерного луча, испускаемого первым лазерным компонентом, в соответствии с некоторыми вариантами осуществления настоящего изобретения. Рентгеновская система 1200 может включать источник рентгеновского излучения 1231, C-дугу 1230, компонент детектирования 1232 и платформу 1250. Источник рентгеновского излучения 1231 может быть выполнен с возможностью испускать рентгеновские лучи в направлении целевого объекта. Компонент детектирования 1232 может быть выполнен с возможностью принимать, по меньшей мере, часть рентгеновских лучей, проходящих через целевой объект. Платформа 1250 может быть выполнена с возможностью поддерживать компонент детектирования 1232 и источник рентгеновского излучения. C-дуга 1230 может быть выполнена с возможностью поддерживать компонент детектирования 1232 и источник рентгеновского излучения. Часть компонентов рентгеновской системы 1200 (например, компонент детектирования 1232, платформа 1250) могут быть подобны компонентам рентгеновской системы 400 или 800.
[0151] Как показано на ФИГ. 12 и 13, рентгеновская система 1200 также может включать второй компонент позиционирования 1220 и лазерный излучающий компонент 1310. Лазерный излучающий компонент 1310 может быть смонтирован на источнике рентгеновского излучения 1231 и выполнен с возможностью испускать лазерный луч (также называемый «позиционирующим лучом»). Проекция лазерного луча на целевой объект может иметь первый заданный шаблон. В некоторых вариантах осуществления решетка с сетками может быть выполнена внутри лазерного излучающего компонента 1310, в результате чего генерируют лазерный луч, проекция которого включает в себя сетки, когда лазерный луч пронизывает решетку. Второй компонент позиционирования 1220 может быть размещен между компонентом детектирования 1232 и платформой 1250. В некоторых вариантах осуществления C-дуга 1230 может быть выполнена, по меньшей мере, с одним держателем, и второй компонент позиционирования 1220 может быть закреплен с помощью держателя(ей). Поверхность второго компонента позиционирования 1220 может показывать шаблон.
[0152] Рентгеновская система 1200 может давать, по меньшей мере, одно анатомическое изображение, связанное с целевым объектом, за счет испускания рентгеновских лучей в направлении целевого объекта. Анатомическое изображение может показывать физическое состояние, по меньшей мере, части целевого объекта. Если что-то не так, по меньшей мере, с частью целевого объекта, место поражения может быть определено на основании анатомического изображения. Наложенное изображение может быть получено путем наложения шаблона и анатомического изображения. Перед размещением целевого объекта на платформе 1250 первый заданный шаблон может быть проверен на совпадение или скорректирован для совпадения с шаблоном второго компонента позиционирования, и путь распространения лазерного луча может быть проверен на совпадение или скорректирован для совпадения со вторым путем распространения пучка рентгеновского излучения. Целевая точка затем может быть определена после того, как лазерный излучающий компонент 1310 выпустит лазерный луч в направлении целевого объекта, на основании анатомического изображения и шаблона. Целевая точка может представлять собой точку, соответствующую месту поражения, и хирургическая операция может быть проведена на целевом объекте. Как результат, рентгеновская система 1200, описанная выше, может облегчать оператору (например, врачу) локализовать целевую точку (например, место поражения) целевого объекта.
[0153] В некоторых вариантах осуществления, как показано на ФИГ. 13, источник рентгеновского излучения 1231 может включать рентгеновский компонент 1330-1 и лазерный компонент управления 1330-2. Рентгеновский компонент 1330-1 может быть выполнен с возможностью испускать рентгеновские лучи в направлении целевого объекта. Лазерный компонент 1330-2 может находиться под рентгеновским компонентом 1330-1. Лазерный компонент 1330-2 может включать отражатель 1330-3 и лазерный излучающий компонент 1310. Отражатель 1330-3 может быть наклонен, и лазерный излучающий компонент 1310 может быть расположен на одной стороне отражателя 1330-3. Путь распространения рентгеновских лучей, испускаемых рентгеновским компонентом 1330-1, может быть тем же путем, что и путь распространения рентгеновских лучей после отражения отражателем 1330-3. Путь распространения лазерного луча, испускаемого лазерным излучающим компонентом 1310, может отличаться от пути распространения лазерного луча после отражения отражателем 1330-3, и путь распространения лазерного луча после отражения отражателем 1330-3 может совпадать с путем распространения рентгеновских лучей, испускаемых рентгеновским компонентом 1330-1. Структура источника рентгеновского излучения 1231, описанного выше, может гарантировать, что путь распространения лазера после отражения отражателем 1330-3 может совпадать с путем распространения рентгеновских лучей, испускаемых рентгеновским компонентом 1330-1, и исключает размещение лазерного излучающего компонента 1310 под рентгеновским компонент 1330-1, что может привести к перекрытию части рентгеновских лучей. В некоторых вариантах осуществления лазерный излучающий компонент 1310 может включать лазерную лампу. Шаблон лазера, испускаемого лазерной лампой, может представлять собой сетки, и конфигурация может способствовать структуре второго компонента позиционирования 1220 при определении целевой точки целевого объекта.
[0154] В некоторых вариантах осуществления второй компонент позиционирования 1220 может быть расположен на поверхности компонента детектирования 1232, обращенной к платформе 1250, что делает расстояние между вторым компонентом позиционирования 1220 и компонентом детектирования 1232 ближе. Размер второго компонента позиционирования 1220 может быть приблизительно равен размеру шаблона, спроецированного на компонент детектирования 1232, что снижает влияние увеличения на второй компонент позиционирования 1220 и улучшает точность локализации целевой точки.
[0155] В некоторых вариантах осуществления второй компонент позиционирования 1220 может быть изготовлен из (мягкого) металла, например, алюминия, меди. Второй компонент позиционирования 1220, изготовленный из мягкого металла, может иметь относительно хорошую гибкость, приемлемую для свертывания, когда нет необходимости использовать второй компонент позиционирования 1220. Рентгеновская система 1200 может также включать модуль взаимодействия человека и компьютера. Модуль взаимодействия человека и компьютера может быть выполнен с возможностью установки второго компонента позиционирования 1220 в предоперационный режим перед хирургическим вмешательством для определения целевой точки и выхода из предоперационного режима после определения целевой точки. Модуль взаимодействия человека и компьютера может включать панель управления и рабочую кнопку.
[0156] Второй компонент позиционирования 1220 может не требовать закрепления на поверхности целевого объекта, что в результате упрощает процесс обнаружения местоположения целевой точки целевого объекта и улучшает эффективность операции. Второй компонент позиционирования 1220 может быть размещен между компонентом детектирования 1232 и платформой 1250, и соотношение увеличения сеток второго компонента позиционирования 1220 может быть относительно небольшое, следовательно, сетки второго компонента позиционирования 1220 могут быть получены относительно более тонкими, чем сетки в предшествующем уровне техники. В итоге целевая точка целевого объекта может быть локализована за один раз, а результат может быть более точным. Помимо этого, время испускания пучка рентгеновского излучения в направлении целевого объекта может быть уменьшено.
[0157] ФИГ. 14 представляет собой принципиальную схему, иллюстрирующую типичный шаблон второго компонента позиционирования, и ФИГ. 15 представляет собой принципиальную схему, иллюстрирующую типичное анатомическое изображение, связанное с типичным шаблоном второго компонента позиционирования, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0158] Шаблон может включать по меньшей мере, один лазерный маркер (не показано на ФИГ. 12-15). По меньшей мере, один лазерный маркер может быть нанесен на решетку с сетками. По меньшей мере, один лазерный маркер может быть размещен на пересечениях сеток в соответствии с заданной формой. Например, по меньшей мере, один лазерный маркер может быть расположен в форме креста на пересечениях сеток. Второй компонент позиционирования 1220 может включать, по меньшей мере, один маркер позиционирования 1221. Каждый из маркеров позиционирования 1221 может соответствовать, по меньшей мере, одному из одного лазерного маркера. Конфигурация маркера(ов) позиционирования 1221 может облегчать оператору локализовать целевую точку целевого объекта на основании анатомического изображения. По меньшей мере, один лазерный маркер, спроецированный на целевой объект, может облегчать оператору локализовать целевую точку (например, точку прокола) целевого объекта для операции (например, процедуры пунктирования). Как показано на ФИГ. 14 и 15, маркер(ы) позиционирования 1221 может/могут быть расположен(ы) в форме креста на пересечениях сеток. Следует отметить, что приведенное выше описание расположения маркера(ов) позиционирования 1221 представлено с целью иллюстрации и не ограничивает объем настоящего изобретения. Расположение маркера(ов) позиционирования 1221 может быть в любой другой подходящей форме. Кроме того, форма сеток второго компонента позиционирования 1220 и/или сеток лазерного луча может включать треугольник, квадрат, четырехугольник, многоугольник, окружность, кривую, концентрические окружности и др. Когда форма сеток представляет собой квадрат, это может облегчать оператор обнаружить и локализовать целевую точку целевого объекта.
[0159] ФИГ. 16-19 представляют собой принципиальную схему, иллюстрирующую типичные вторые компоненты позиционирования в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0160] Как показано на ФИГ. 16-19, рентгеновская система 1200 может включать устройство перемещения. Устройство перемещения может быть выполнено с возможностью перемещать второй компонент позиционирования 1220 от поверхности компонента детектирования 1232, обращенной к платформе 1250. Например, устройство перемещения может перемещать второй компонент позиционирования 1220 с помощью механических рук, цилиндров и др. В некоторых вариантах осуществления устройство перемещения может включать передаточный механизм 1640. Передаточный механизм 1640 может быть выполнен с возможностью помещать второй компонент позиционирования 1220 на компоненте детектирования 1232 при входе в предоперационный режим и свертывать второй компонент позиционирования 1220 на компоненте детектирования 1232 при выходе из предоперационного режима. Передаточный механизм 1640 может включать по меньшей мере, одно колесо передачи. По меньшей мере, одно колесо передачи может быть соединено со вторым компонентом позиционирования 1220. В некоторых вариантах осуществления, как показано на ФИГ. 16 и 17, конец второго компонента позиционирования 1220 может быть зафиксирован на колесе передачи. При определении вхождения в предоперационный режим передаточный механизм 1640 может выдвигать второй компонент позиционирования 1220. При обнаружении выхода из предоперационного режима передаточный механизм 1640 может сматывать второй компонент позиционирования 1220 на колесо передачи. В некоторых вариантах осуществления, как показано на ФИГ. 18 и 19, когда второй компонент позиционирования 1220 используют, передаточный механизм 1640 может размещать второй компонент позиционирования 1220 на компоненте детектирования 1232. Когда отсутствует необходимость применения второго компонента позиционирования 1220, передаточный механизм 1640 может скрывать второй компонент позиционирования 1220 на поверхности компонента детектирования 1232, обращенной от платформы 1250. Следует отметить, что приведенное выше описание передаточного механизма 1640 представлено с целью иллюстрации и не предназначено для ограничения объема настоящего изобретения. Передаточный механизм 1640 может включать любую подходящую структуру, которая позволяет размещать или сматывать второй компонент позиционирования 1220. Конфигурация передаточного механизма 1640 может облегчать использование рентгеновской системы и сокращать время, необходимое оператору для проведения хирургического вмешательства. Помимо этого, второй компонент позиционирования 1220 может оказывать незначительное влияние на нормальный процесс формирования анатомического изображения, связанного с целевым объектом, что в результате повышает применимость рентгеновской системы.
[0161] ФИГ. 20 представляет собой схему последовательности операций, иллюстрирующую способ определения целевой точки в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0162] В блоке 2010 второй компонент позиционирования 1220 может быть установлен между компонентом детектирования 1232 и целевым объектом. В некоторых вариантах осуществления передаточный механизм 1640 может перемещать второй компонент позиционирования 1220 к поверхности компонента детектирования 1232, обращенной к целевому объекту, при обнаружении, что установлен предоперационный режим.
[0163] В блоке 2020 может быть получено наложенное изображение. Наложенное изображение может включать анатомическое изображение, связанное с целевым объектом, и шаблон второго компонента позиционирования 1220, сформированный на поверхности целевого объекта. В некоторых вариантах осуществления анатомическое изображение может быть получено путем проецирования детекторного луча в направлении целевого объекта.
[0164] В блоке 2030 место поражения, связанное с целевым объектом, может быть определено на основании анатомического изображения или наложенного изображения. В блоке 2040 целевая точка, соответствующая месту поражения, может быть определена на основании наложенного изображения и первого заданного шаблона, определенного проецированием позиционирующего луча к целевому объекту. Позиционирующий луч может быть испущен лазерным излучающим компонентом. После определения целевой точки можно выходить из предоперационного режима, и оператор может проводить хирургическое вмешательство на целевой точке или рядом с ней.
[0165] Целевая точка может быть определена на основании соотношения между первым заданным шаблоном и шаблоном второго компонента позиционирования 1220, что в результате улучшает точность и сокращает оператору рабочее время для определения целевой точки и сокращает время облучения в направлении целевого объекта.
[0166] ФИГ. 21 представляет собой схему последовательности операций, иллюстрирующую типичное обрабатывающее устройство 120 в соответствии с некоторыми вариантами осуществления настоящего изобретения. Обрабатывающее устройство 120 может включать модуль определения изображения 2110, модуль наложения шаблонов 2120, модуль формирования шаблона 2130 и модуль определения точки 2140.
[0167] Модуль определения изображения 2110 может быть выполнен с возможностью получения анатомического изображения, связанного с целевым объектом. Анатомическое изображение может показывать физическое состояние, по меньшей мере, части целевого объекта. В некоторых вариантах осуществления модуль определения изображения 2110 может определять анатомическое изображение путем проецирования детекторного луча в направлении целевого объекта. Модуль определения изображения 2110 может проецировать детекторный луч при получении команды на проецирование детекторного луча.
[0168] Модуль наложения шаблонов 2120 может быть выполнен с возможностью накладывать первый шаблон на анатомическое изображение. Первый шаблон может включать множество первых повторяющихся форм. Анатомическое изображение может быть поделено на множество частей с помощью первых повторяющихся форм. Первый шаблон может быть использован для маркировки, по меньшей мере, одной точки (например, места поражения) целевого объекта на основании первых повторяющихся форм. В некоторых вариантах осуществления модуль наложения шаблонов 2120 может определять, по меньшей мере, одно местоположение, по меньшей мере, одной точки целевого объекта относительно любого контрольного элемента первого шаблона. Например, контрольный элемент может включать точку на первом шаблоне, линию на первом шаблоне и др. В некоторых вариантах осуществления первый шаблон может включать, по меньшей мере, один маркер. По меньшей мере, один маркер может быть использован для маркировки, по меньшей мере, одной точки (например, места поражения) целевого объекта. По меньшей мере, один маркер может включать точки пересечения сетки, короткие линии, круги и др.
[0169] Модуль формирования шаблона 2130 может быть выполнен с возможностью формировать второй шаблон на поверхности целевого объекта проецированием позиционирующего луча к целевому объекту. Позиционирующим лучом может быть лазерный луч. Лазерный луч может представлять собой совокупность индуцированных фотонов. Второй шаблон может включать множество вторых повторяющихся форм, и второй шаблон может совпадать с первым шаблоном. В некоторых вариантах осуществления размер каждой первой повторяющейся формы первого шаблона может быть пропорционален размеру каждой второй повторяющейся формы второго шаблона, например, с соотношением 1,5:1, 1,2:1 и др.
[0170] Модуль определения точки 2140 может быть выполнен с возможностью определения целевой точки на основании анатомического изображения и второго шаблона. Целевая точка может представлять собой точку, где проводят хирургическое вмешательство.
[0171] В некоторых вариантах осуществления модуль определения точки 2140 может определять место поражения, связанное с целевым объектом, на основании анатомического изображения. Если что-то не так, по меньшей мере, с частью целевого объекта, место поражения может быть определено на основании анатомического изображения. Модуль определения точки 2140 затем может определить целевую точку на сетке второго шаблона на основании места поражения. Целевая точка может представлять собой точку на втором шаблоне или поверхности целевого объекта, соответствующую месту поражения на анатомическом изображении и первом шаблоне.
[0172] В некоторых вариантах осуществления модуль определения точки 2140 вначале может определять соотношение между множеством первых точек на сетках первого шаблона и множеством вторых точек, соответствующих множеству первых точек, на сетках второго шаблона. Например, соотношение может включать прямую пропорциональную зависимость (например, 1,5:1, 1,2:1), обратную пропорциональную зависимость, логарифмическую зависимость и др. Модуль определения точки 2140 затем может определить целевую точку на сетках второго шаблона на основании места поражения и этого соотношения.
[0173] В некоторых вариантах осуществления модуль определения точки 2140 может получать диагностическую информацию, связанную с целевым объектом. Диагностическая информация может быть связана с анатомическим изображением или любым другим результатом исследования, связанным с целевым объектом, который обозначает физическое состояние, по меньшей мере, части целевого объекта. Модуль определения точки 2140 затем может определить место поражения, связанное с целевым объектом, на основании диагностической информации.
[0174] ФИГ. 22 представляет собой схему последовательности операций, иллюстрирующую способ определения целевой точки рентгеновской системы в соответствии с некоторыми вариантами осуществления настоящего изобретения. Рентгеновская система может включать источник рентгеновского излучения, C-дугу, компонент детектирования и платформу. Функции источника рентгеновского излучения, C-дуги, компонента детектирования и платформы могут быть аналогичны функциям источника рентгеновского излучения, C-дуги, компонента детектирования и платформы, описанным для рентгеновской системы 400, рентгеновской системы 800 или рентгеновской системы 1200.
[0175] Источник рентгеновского излучения может дополнительно включать рентгеновский компонент, лазерный компонент управления и отражатель. Структура и функции рентгеновского компонента, компонента управления лазером и отражателя могут быть аналогичны структуре и функциям рентгеновского компонента 1330-1, компонента управления лазером 1330-2 и отражателя 1330-3, соответственно. Как показано на ФИГ. 13, лазерный компонент управления 1330-2 может быть расположен на стороне рентгеновского компонента 1330-1 и не может быть размещен в пределах интервала, в которым рентгеновский компонент 1330-1 испускает рентгеновские лучи, что в результате исключает перекрывание, по меньшей мере, части рентгеновских лучей. В некоторых вариантах осуществления отражатель 1330-3 может быть размещен в пределах интервала, в котором рентгеновский компонент 1330-1 испускает рентгеновские лучи. Путь распространения лазерного луча, испускаемого лазерным излучающим компонентом, может быть изменен при прохождении через отражатель, и измененный путь распространения может совпадать с путем распространения рентгеновского луча, испускаемого источником рентгеновского излучения.
[0176] В блоке 2210 модуль определения изображения 2110 может определять анатомическое изображение, связанное с целевым объектом. Анатомическое изображение может показывать физическое состояние, по меньшей мере, части целевого объекта.
[0177] Модуль определения изображения 2110 может определять анатомическое изображение путем проецирования детекторного луча в направлении целевого объекта. Детекторный луч может представлять собой рентгеновский луч, испускаемый источником рентгеновского излучения. Рентгеновский луч может представлять собой поток частиц, созданный при прохождении электронов между двумя энергетическими уровнями с сильно отличающимися энергетическим уровнями в атоме. Рентгеновский луч может представлять собой электромагнитную волну, имеющую длину волны между ультрафиолетовыми лучами и гамма-лучами.
[0178] Модуль определения изображения 2110 может проецировать детекторный луч при получении команды на проецирование детекторного луча. В некоторых вариантах осуществления команда может быть автоматически создана при обнаружении, что целевой объект помещен на платформу. В некоторых вариантах осуществления команда может быть автоматически создана при обнаружении, что целевой объект был помещен на платформу и не был перемещен в течение заданного времени. В некоторых вариантах осуществления команда может быть создана оператором (например, врачом) через сеть 150.
[0179] В блоке 2220 модуль наложения шаблонов 2120 может накладывать первый шаблон на анатомическом изображении. Первый шаблон может включать множество первых повторяющихся форм. Анатомическое изображение может быть поделено на множество частей с помощью первых повторяющихся форм. Первый шаблон может быть использован для маркировки, по меньшей мере, одной точки (например, места поражения) целевого объекта на основании первых повторяющихся форм. В некоторых вариантах осуществления модуль наложения шаблонов 2120 может определять, по меньшей мере, одно местоположение, по меньшей мере, одной точки целевого объекта относительно любого контрольного элемента первого шаблона. Например, контрольный элемент может включать точку на первом шаблоне, линию на первом шаблоне и др. В некоторых вариантах осуществления первый шаблон может включать, по меньшей мере, один маркер. По меньшей мере, один маркер может быть использован для маркировки, по меньшей мере, одной точки (например, места поражения) целевого объекта. По меньшей мере, один маркер может включать точки пересечения сеток, короткие линии, круги и др.
[0180] В блоке 2230 модуль формирования шаблона 2130 может формировать второй шаблон на поверхности целевого объекта путем проецирования позиционирующего луча к целевому объекту. Позиционирующий луч может представлять собой лазерный луч. Лазерный луч может представлять собой совокупность индуцированных фотонов. Второй шаблон может включать множество вторых повторяющихся форм, и второй шаблон может совпадать с первым шаблоном. В некоторых вариантах осуществления размер каждой первой повторяющейся формы первого шаблона может быть пропорционален размеру каждой второй повторяющейся формы второго шаблона, например, с соотношением 1,5:1, 1,2:1 и др.
[0181] В некоторых вариантах осуществления первый шаблон или второй шаблон могут включать сетки. Например, сетки могут содержать сетки, включающие в себя правильные многоугольники, сетки, включающие в себя неправильные многоугольники, сетки, включающие в себя окружности, и др. В качестве другого примера, первый шаблон или второй шаблон могут включать множество замкнутых форм, расположенных снаружи вовнутрь. Замкнутые формы могут включать окружности, правильные многоугольники, неправильные многоугольники и др. Следует отметить, что приведенное выше описание первого шаблона и/или второго шаблона представлено с целью иллюстрации и не предназначено для ограничения объема настоящего изобретения. Первый шаблон и/или второй шаблон может представлять собой любой шаблон с подходящими формами.
[0182] В некоторых вариантах осуществления модуль формирования шаблона 2130 может проецировать позиционирующий луч при получении команды на проецирование позиционирующего луча. В некоторых вариантах осуществления команда может быть автоматически создана при обнаружении, что целевой объект помещен на платформу. В некоторых вариантах осуществления команда может быть автоматически создана при обнаружении, что целевой объект был помещен на платформу и не был перемещен в течение заданного времени. В некоторых вариантах осуществления команда может быть создана оператором через сеть 150.
[0183] В некоторых вариантах осуществления модуль формирования шаблона 2130 может формировать второй шаблон на поверхности целевого объекта путем проецирования маркерного луча на целевой объект. Маркерный луч может быть испущен лазерным устройством (например, лазерным излучающим компонентом, лазерной лампой), установленным на C-дуге.
[0184] В блоке 2240 модуль определения точки 2140 может определять целевую точку на основании анатомического изображения и второго шаблона. Целевая точка может представлять собой точку, где проводят хирургическую операцию.
[0185] В некоторых вариантах осуществления позиционирующий луч может быть настроен на основании первого шаблона и второго шаблона, спроецированного позиционирующим лучом. Когда целевой объект не помещен на платформу, может быть необходимо совпадение второго шаблона, спроецированного позиционирующим лучом, с первым шаблоном, чтобы целевая точка могла быть определена на основании места поражения. В некоторых вариантах осуществления металлическая решетка с сетками может быть помещена на поверхность компонента детектирования. Контрольное изображение может быть получено путем испускания рентгеновских лучей в направлении решетки. Контрольное изображение может включать первый шаблон. После испускания позиционирующего луча в направлении решетки может быть определено соотношение между первым шаблоном и вторым шаблоном. Позиционирующий луч может быть настроен, если на контрольном изображении второй шаблон не совпадает с первым шаблоном.
[0186] Следует отметить, что приведенное выше описание представлено с целью иллюстрации и не предназначено для ограничения его объема. Специалист в данной области техники может выполнить множество изменений и модификаций, следуя указаниям настоящего изобретения. Однако такие изменения и модификации не выходят за рамки объема настоящего изобретения. Например, детекторный луч и позиционирующий луч могут быть выпущены одновременно. В качестве другого примера, позиционирующий луч может быть выпущен перед детекторным лучом.
[0187] ФИГ. 23 представляет собой схему последовательности операций, иллюстрирующую способ определения целевой точки, связанной с целевым объектом, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0188] В блоке 2310 модуль определения точки 2140 может определять место поражения, связанное с целевым объектом, на основании анатомического изображения. Как описано в блоке 2210, анатомическое изображение может показывать физическое состояние, по меньшей мере, части целевого объекта. Если что-то не так, по меньшей мере, с частью целевого объекта, место поражения может быть обнаружено на основании анатомического изображения. Так как первый шаблон перекрыт анатомическим изображением, положение места поражения может отмечено на первом шаблоне.
[0189] В блоке 2320 модуль определения точки 2140 может определять целевую точку на сетках второго шаблона на основании места поражения. Целевая точка может представлять собой точку на втором шаблоне или на поверхности целевого объекта, соответствующую месту поражения на анатомическом изображении и первом шаблоне, и модуль определения точки 2140 может определять целевую точку на основании места поражения.
[0190] В некоторых вариантах осуществления модуль определения точки 2140 вначале может определять соотношение между множеством первых точек на сетках первого шаблона и множеством вторых точек, соответствующих множеству первых точек, на сетках второго шаблона. Например, соотношение может включать может включать прямую пропорциональную зависимость (например, 1,5:1, 1,2:1), обратную пропорциональную зависимость, логарифмическую зависимость и др. Модуль определения точки 2140 затем может определять целевую точку на сетках второго шаблона на основании места поражения и этого соотношения. Следовательно, целевая точка может быть определена автоматически рентгеновской системой, что может исключать риск оценки целевой точки оператором, улучшить эффективность определения целевой точки и снизить затраты.
[0191] ФИГ. 24 представляет собой схему последовательности операций, иллюстрирующую типичный процесс определения места поражения, связанного с целевым объектом, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0192] В блоке 2410 модуль определения точки 2140 может получать диагностическую информацию, связанную с целевым объектом. Диагностическая информация может быть связана с анатомическим изображением, полученном в блоке 2210, или любым другим результатом обследования, связанным с целевым объектом, который свидетельствует о физическом состоянии, по меньшей мере, части целевого объекта. В блоке 2420 модуль определения точки 2140 может определять место поражения, связанное с целевым объектом, на основании диагностической информации.
[0193] В некоторых вариантах осуществления модуль определения точки 2140 может показывать диагностическую информацию, связанную с целевым объектом, на анатомическом изображении. Например, модуль определения точки 2140 может показывать диагностическую информацию на одной стороне места поражения. Это может облегчать оператору ясно раскрыть диагностическую информацию или поделиться диагностической информацией с другими удаленными операторами. В результате это может сберечь время для хирургической операции и улучшить вероятность безопасности в случае неожиданно появившихся пациентов.
[0194] После описания основных концепций специалисту в данной области техники после прочтения этого подробного раскрытия может быть достаточно очевидно, что вышеприведенное подробное раскрытие представлено только в качестве примера и не является ограничивающим. Различные изменения, усовершенствования и модификации могут быть выполнены и могут подразумеваться специалистом в данной области техники, хотя здесь прямо и не указаны. Эти изменения, усовершенствования и модификации, как подразумевается, подтверждены изобретением и находятся в рамках сути и объема типичных вариантов осуществления изобретения.
[0195] Более того, для описания вариантов осуществления настоящего изобретения использована определенная терминология. Например, термины «один вариант осуществления», «вариант осуществления» и/или «некоторые варианты осуществления» означают, что конкретные признак, структура или характеристика, описанные в связи с этим вариантом осуществления, включены, по меньшей мере, в один вариант осуществления настоящего изобретения. Следовательно, следует подчеркнуть и следует учитывать, что две или несколько ссылок на «вариант осуществления», или «один вариант осуществления», или «альтернативный вариант осуществления» в разных частях данного описания не обязательно все ссылаются на один и тот же вариант осуществления. Кроме того, конкретные признаки, структуры или характеристики могут быть объединены в качестве приемлемых в одном или нескольких вариантах осуществления настоящего изобретения.
[0196] Кроме того, специалисту в данной области техники будет понятно, что аспекты настоящего изобретения могут быть проиллюстрированы и описаны здесь в любом из ряда патентуемых классов или контекста, включая любые новые и полезные процесс, машину, производство или композицию материала, или любого нового и полезного их усовершенствования. Соответственно, аспекты настоящего изобретения могут быть реализованы полностью аппаратным обеспечением, полностью программным обеспечением (включая встроенные программы, резидентные программы, микрокоманды и др.) или при объединении программной и аппаратной реализации, которые все в целом могут быть упомянуты здесь как «узел», «модуль» или «система». Кроме того, аспекты настоящего изобретения могут иметь форму компьютерного программного продукта, воплощенного на одном или нескольких компьютерно-читаемых носителях, имеющих компьютерно-читаемый программный код, заключенный на них.
[0197] Компьютерно-читаемый носитель сигнала может включать распространяемый сигнал передачи данных с компьютерно-читаемым программным кодом, включенным в него, например, в базовой полосе частот или в виде части несущей волны. Такой распространяемый сигнал может принимать любую из множества форм, в том числе электромагнитную, оптическую или т.п., или любую подходящую их комбинацию. Компьютерно-читаемый носитель сигнала может представлять собой любой компьютерно-читаемый носитель, который не является компьютерно-читаемой средой хранения информации и который может взаимодействовать, распространять или переносить программу путем использования системой, прибором или устройством исполнения команд или при взаимодействии с ними. Программный код, включенный на компьютерно-читаемый носитель сигнала, может быть передан с использованием любой подходящей среды, включая беспроводную, проводную, оптоволоконный кабель, RF или т.п., или любую подходящую их комбинацию.
[0198] Код компьютерной программы для проведения операций в случае аспектов настоящего изобретения может быть написан в любой комбинации одного или нескольких языков программирования, включая объектно-ориентированный язык программирования, такой как Java, Scala, Smalltalk, Eiffel, JADE, Emerald, C++, C#, VB. NET, Python или т.п., обычные языки процедурного программирования, такие как «C» программируемый язык, Visual Basic, Fortran 2103, Perl, COBOL 2102, PHP, ABAP, языки динамического программирования, такие как Python, Ruby и Groovy, или другие языки программирования. Программный код может быть полностью выполнен на компьютере пользователя, частично на компьютере пользователя, в виде отдельного программного пакета, частично на компьютере пользователя и частично на удаленном компьютере, или полностью на удаленном компьютере или сервере. В последнем сценарии удаленный компьютер может быть соединен с компьютером пользователя через любой тип сети, включая локальную вычислительную сеть (LAN) или глобальную компьютерную сеть (WAN), или соединение может быть выполнено с внешним компьютером (например, через интернет с использованием Internet Service Provider) или в облачной среде обработки данных, или предложено в виде сервиса, такого как программное обеспечение как услуга (SaaS).
[0199] Кроме того, изложенный порядок технологических элементов или последовательностей, или использование чисел, букв или других обозначений, таким образом, не предназначен для ограничения заявленных способов и методов каким-либо порядком, за исключением случаев, которые могут быть указаны в формуле изобретения. Хотя в приведенном выше описании обсуждаются различные примеры того, что в настоящее время считается множеством полезных вариантов осуществления изобретения, следует понимать, что такие подробности предназначены исключительно для этой цели, и что прилагаемая формула изобретения не ограничена раскрытыми вариантами осуществления, но, напротив, предназначена для охвата модификаций и эквивалентных средств, которые находятся в рамках сути и объема раскрытых вариантов осуществления. Например, хотя реализация различных компонентов, описанных выше, может быть осуществлена в аппаратном устройстве, они также могут быть реализованы в виде только программного решения, например, путем установки на существующий сервер или мобильное устройство.
[0200] Аналогично, следует понимать, что в приведенном выше описании вариантов осуществления настоящего изобретения различные признаки иногда сгруппированы вместе в одном варианте осуществления, чертеже или его описании с целью оптимизации раскрытия, что способствует пониманию одного или нескольких разных вариантов осуществления изобретения. Этот способ раскрытия, однако, не следует интерпретировать как отражающий намерение, что заявленный объект требует большего количества признаков, чем явно указано в каждом пункте. Скорее, варианты осуществления основаны меньше чем на всех признаках одного раскрытого выше варианта осуществления.
[0201] В некоторых вариантах осуществления числа, выражающие количества или свойства, используемые для описания и заявления определенных вариантов осуществления заявки, следует понимать как изменяемые в некоторых случаях термином «примерно», «приблизительно» или «по существу». Например, «примерно», «приблизительно» или «по существу» могут указывать на отклонение на ±20% от значения, которое оно описывает, если не указано иное. Соответственно, в некоторых вариантах осуществления числовые параметры, изложенные в письменном описании и прилагаемой формуле изобретения, являются приближениями, которые могут варьироваться в зависимости от желаемых свойств, которые должны быть получены с помощью конкретного варианта осуществления. В некоторых вариантах осуществления числовые параметры следует истолковывать в свете количества сообщаемых значащих цифр и с применением обычных методов округления. Несмотря на то, что числовые интервалы и параметры, определяющие широкий объем некоторых вариантов осуществления заявки, являются приблизительными, числовые значения, изложенные в конкретных примерах, сообщаются настолько точно, насколько это практически осуществимо.
[0202] Любые из патентов, патентных заявок, публикаций патентных заявок и других материалов, таких как статьи, книги, спецификации, публикации, документы, предметы и/или т.п., на которые даются ссылки в настоящем описании, включены в настоящий документ посредством ссылки и во всей полноте для всех целей, за исключением любого рассмотрения дела по заявке, связанного с ними, любых из них, которые не соответствуют или противоречат настоящему документу, или любых из них, которые могут оказать ограничивающее влияние в отношении самого широкого объема притязаний в настоящее время или позже, связанного с настоящим документом. Например, если есть какое-либо несоответствие или конфликт между описанием, определением и/или использованием термина, связанным с любым включенным материалом, и термином, связанным с настоящим документом, преимущественную силу имеет описание, определение и/или использование термина в настоящем документе.
[0203] Итак, следует понимать, что варианты осуществления раскрытой заявки иллюстрируют принципы вариантов осуществления данной заявки. Другие модификации, которые могут быть использованы, могут находиться в рамках заявки. Таким образом, в качестве примера, но не ограничения, альтернативные конфигурации вариантов осуществления заявки могут быть применены в соответствии с изложенными здесь идеями. Следовательно, варианты осуществления настоящей заявки не ограничены тем, что точно показано и описано.
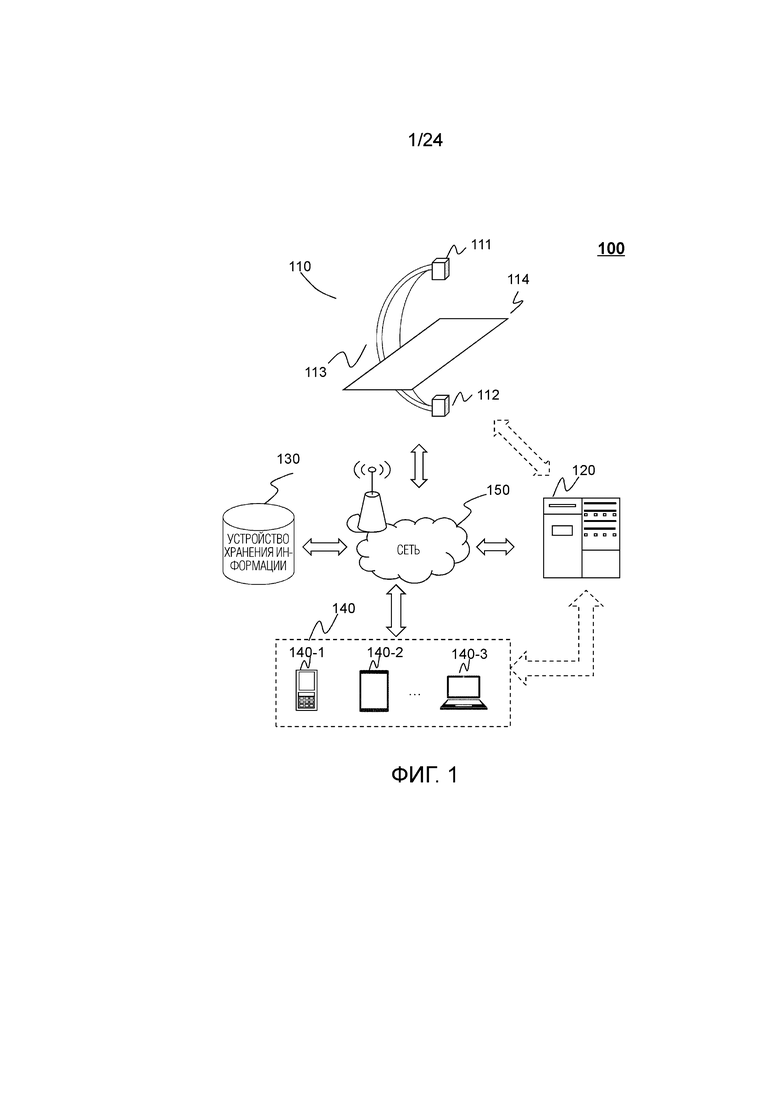
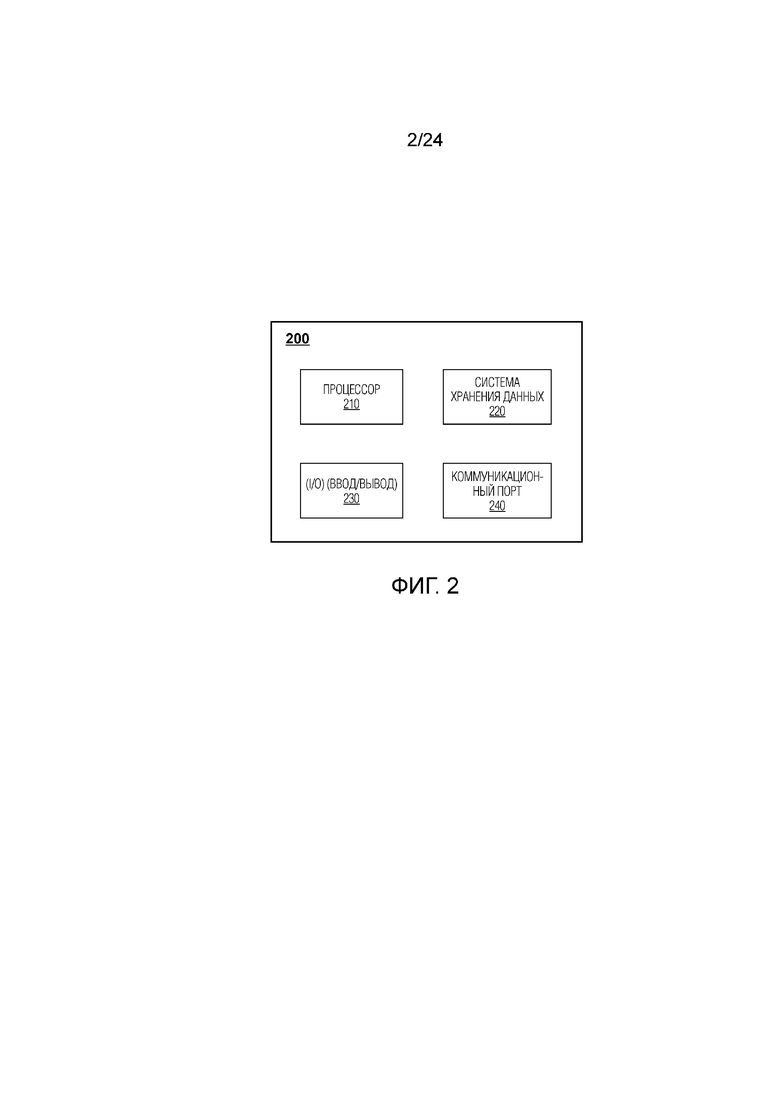
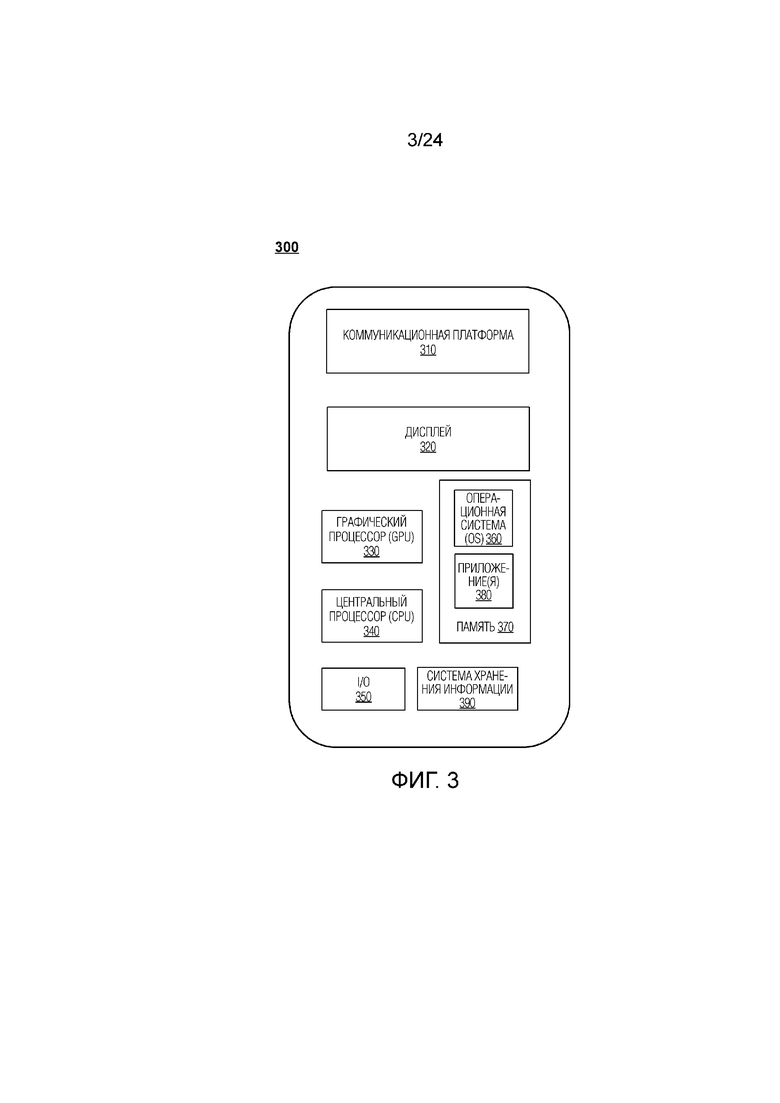
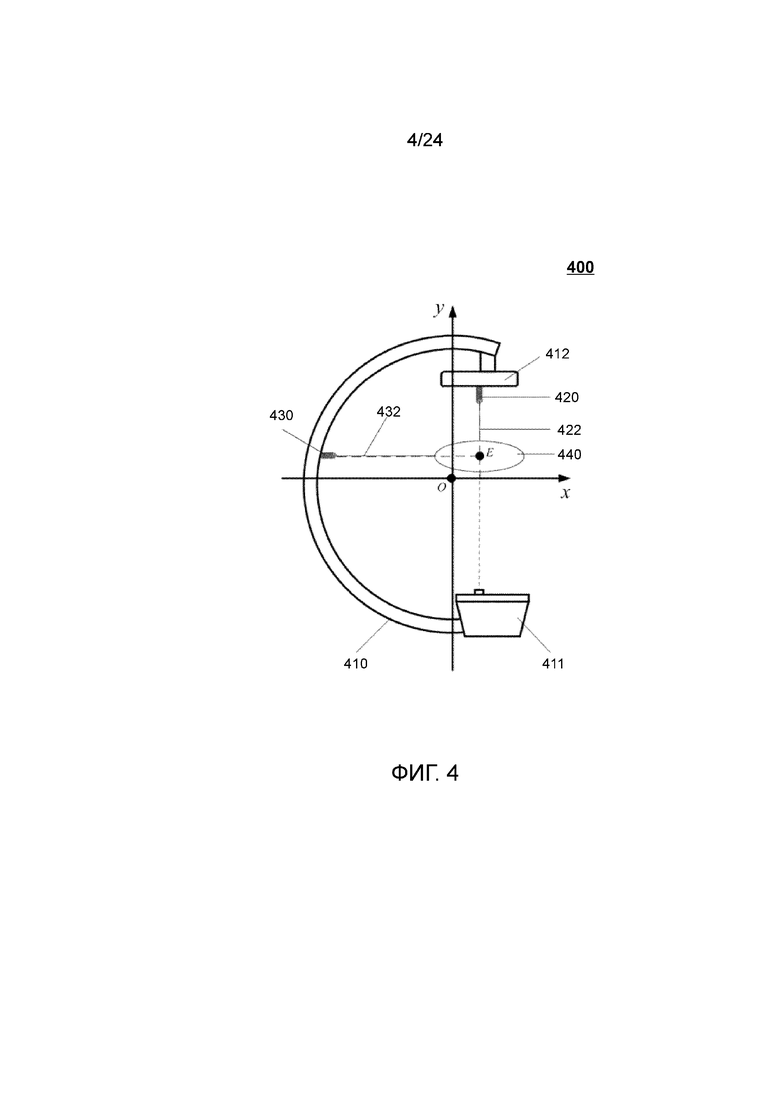
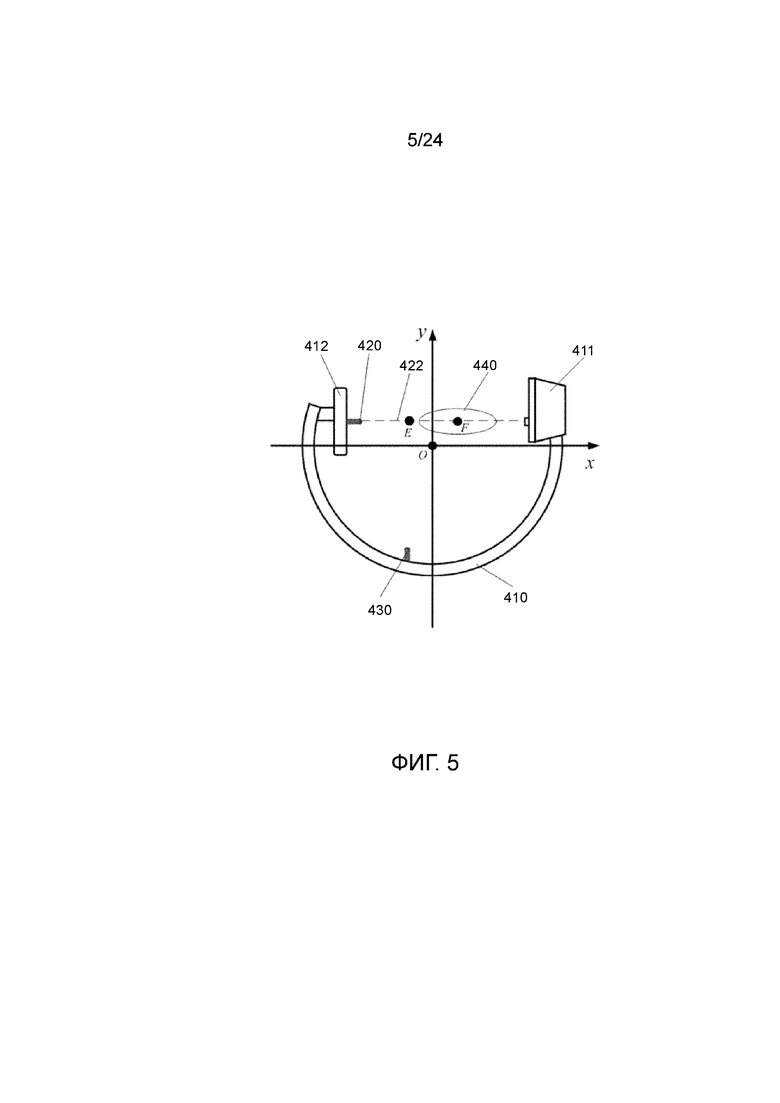
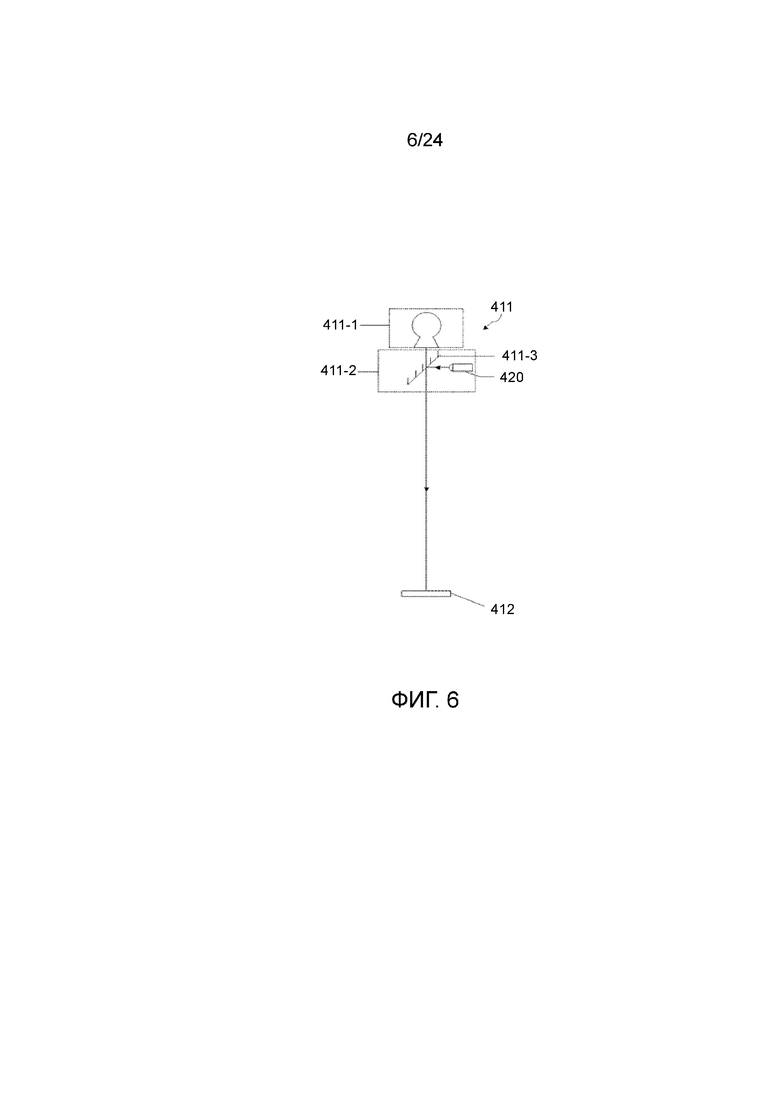
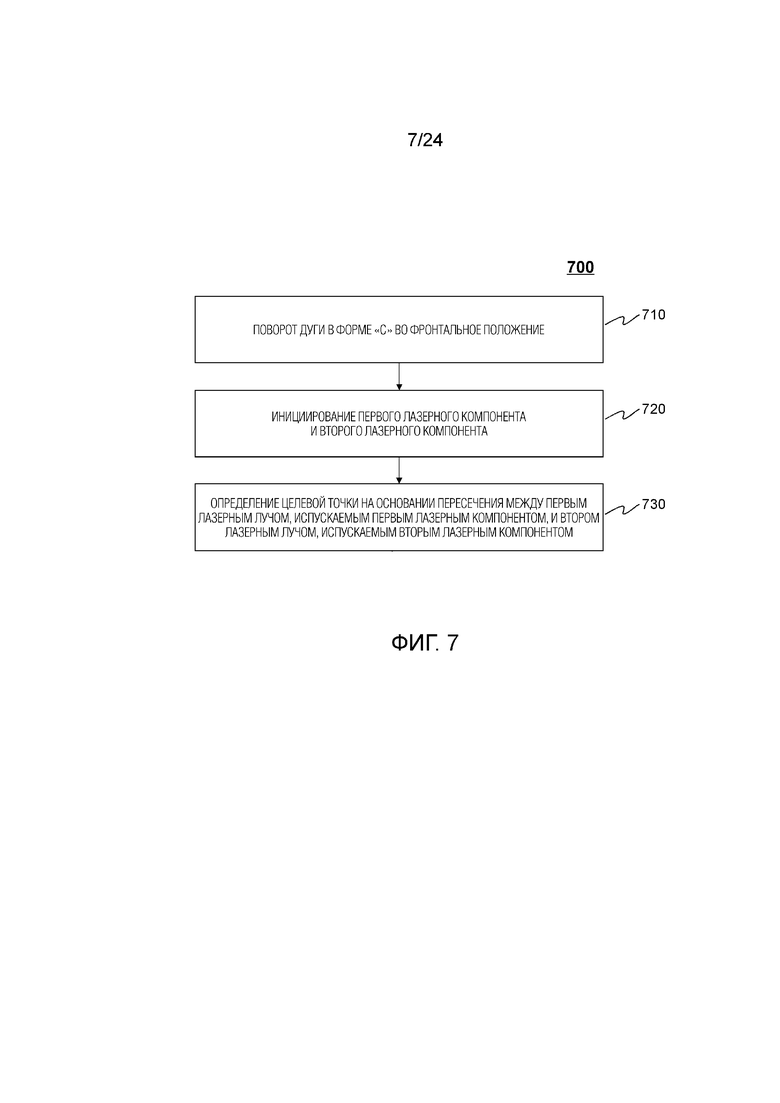
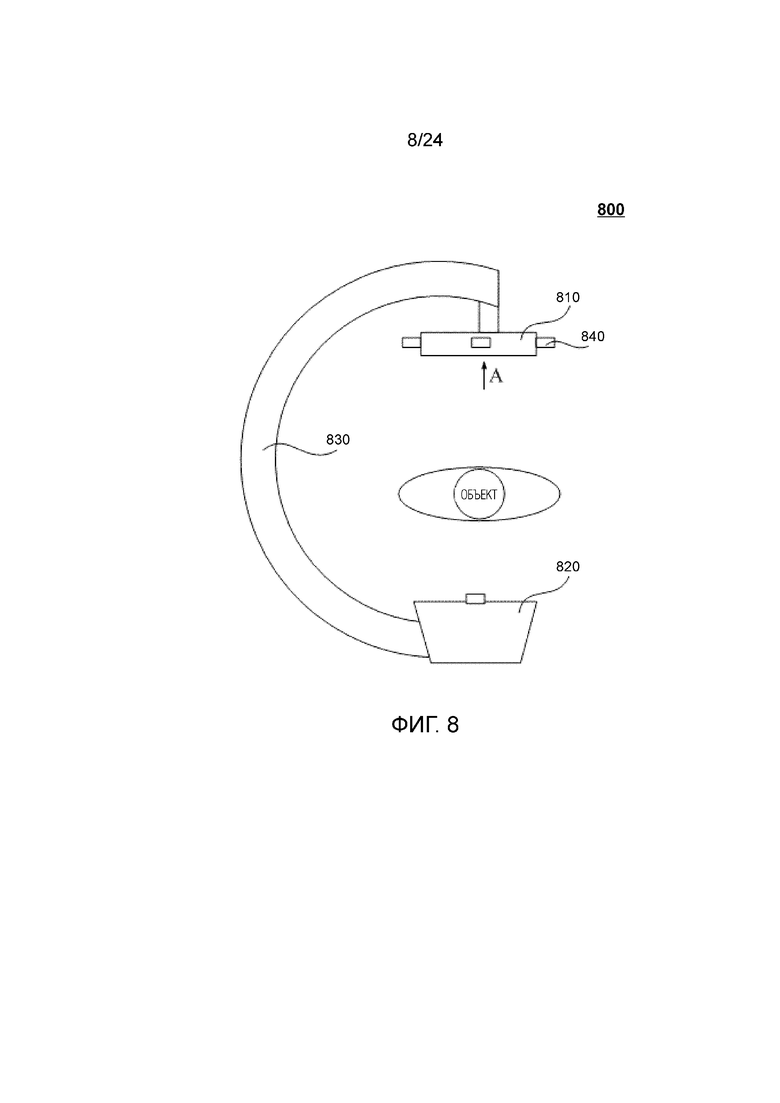
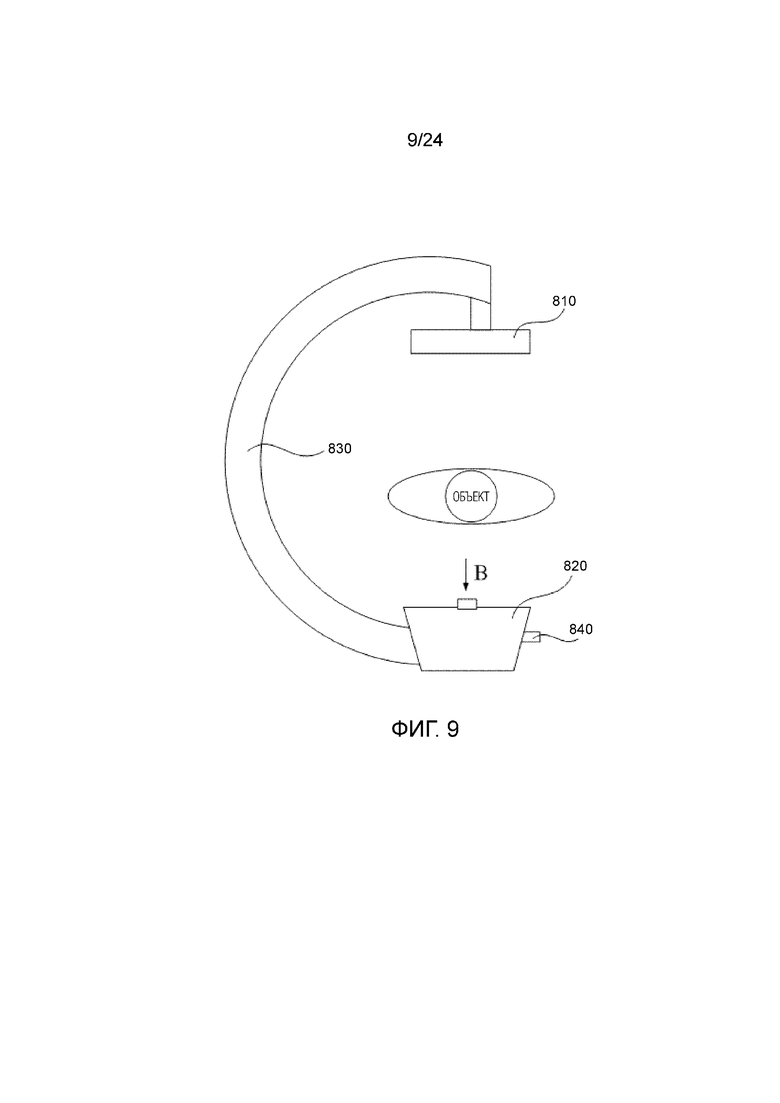
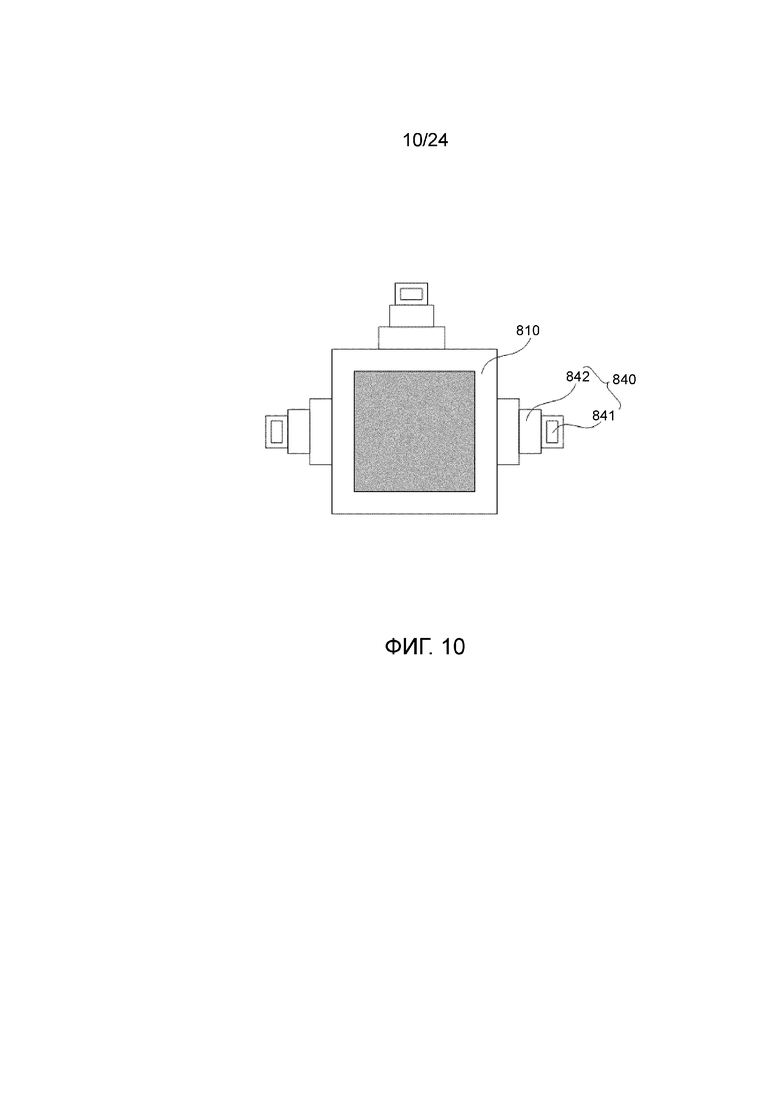
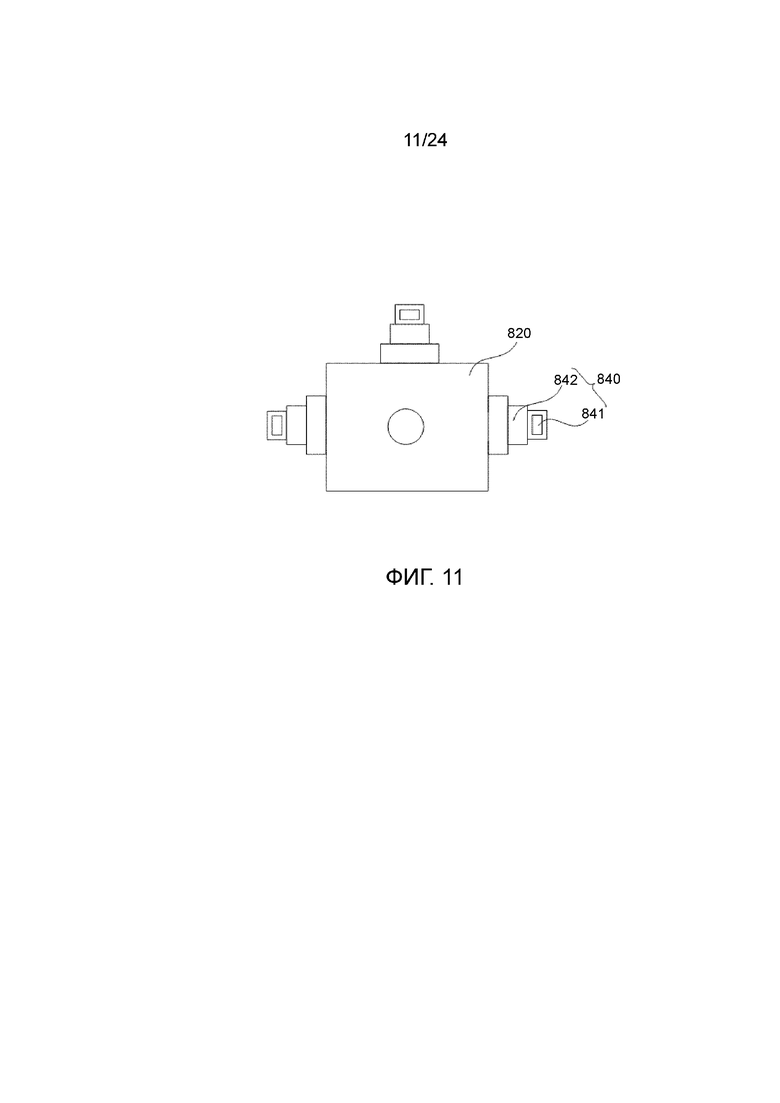
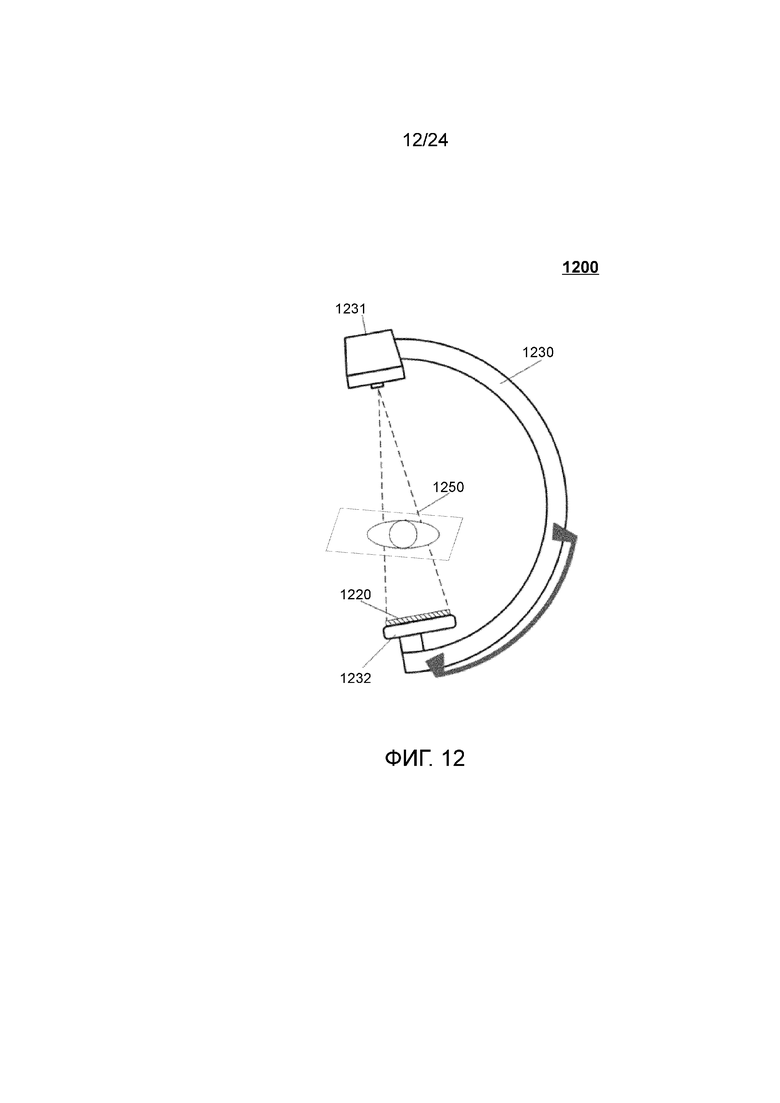
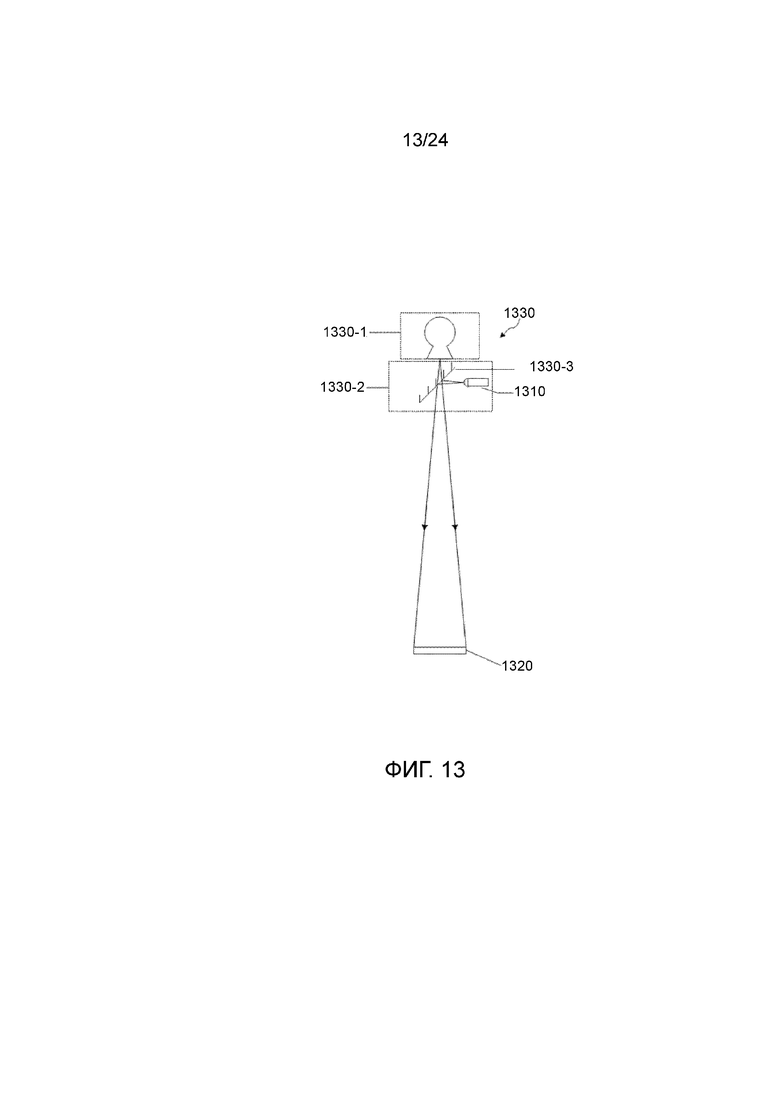
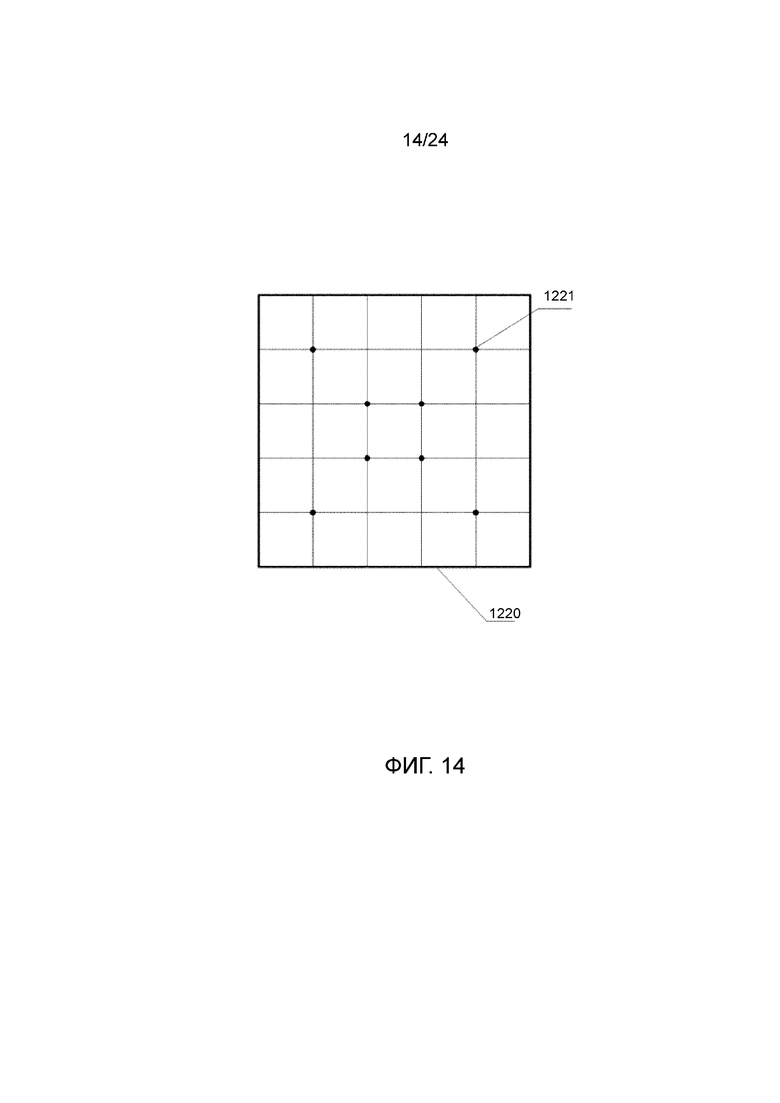
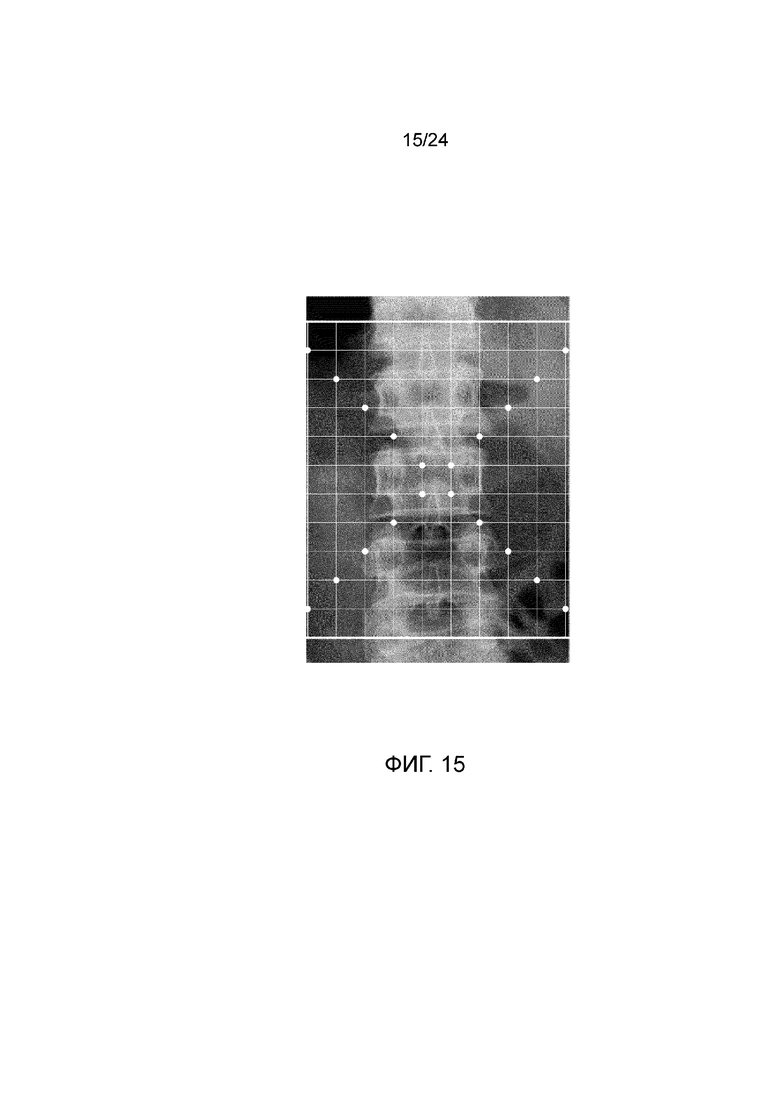
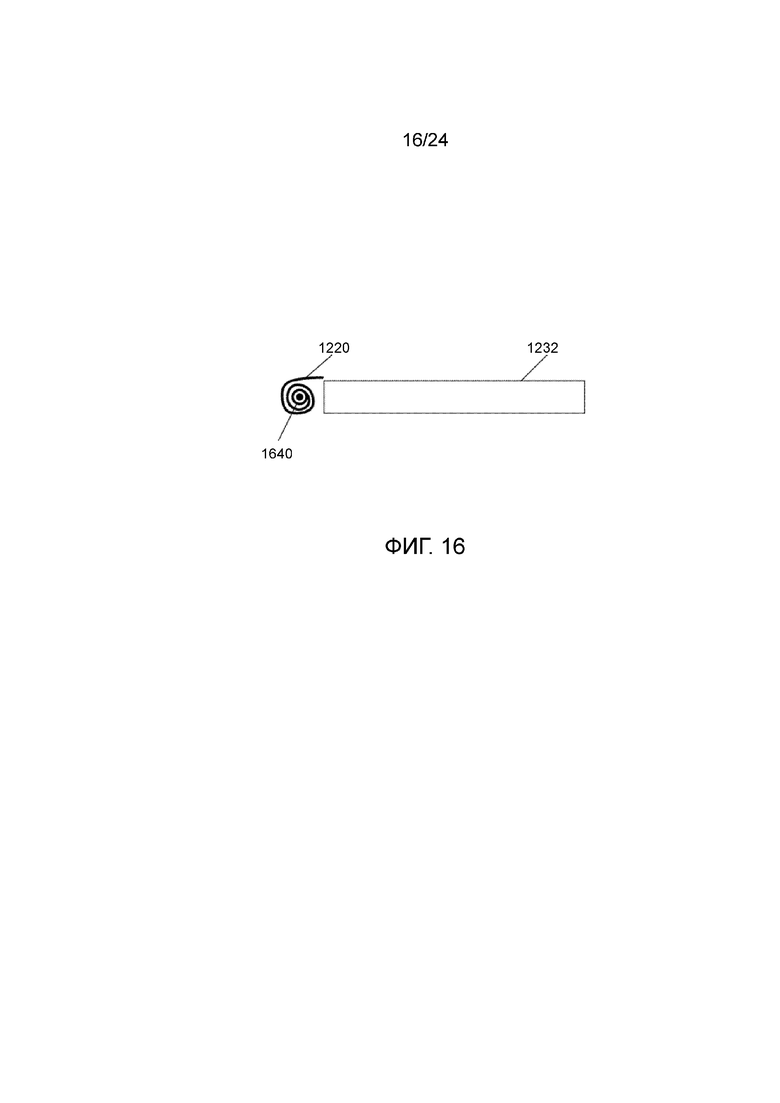
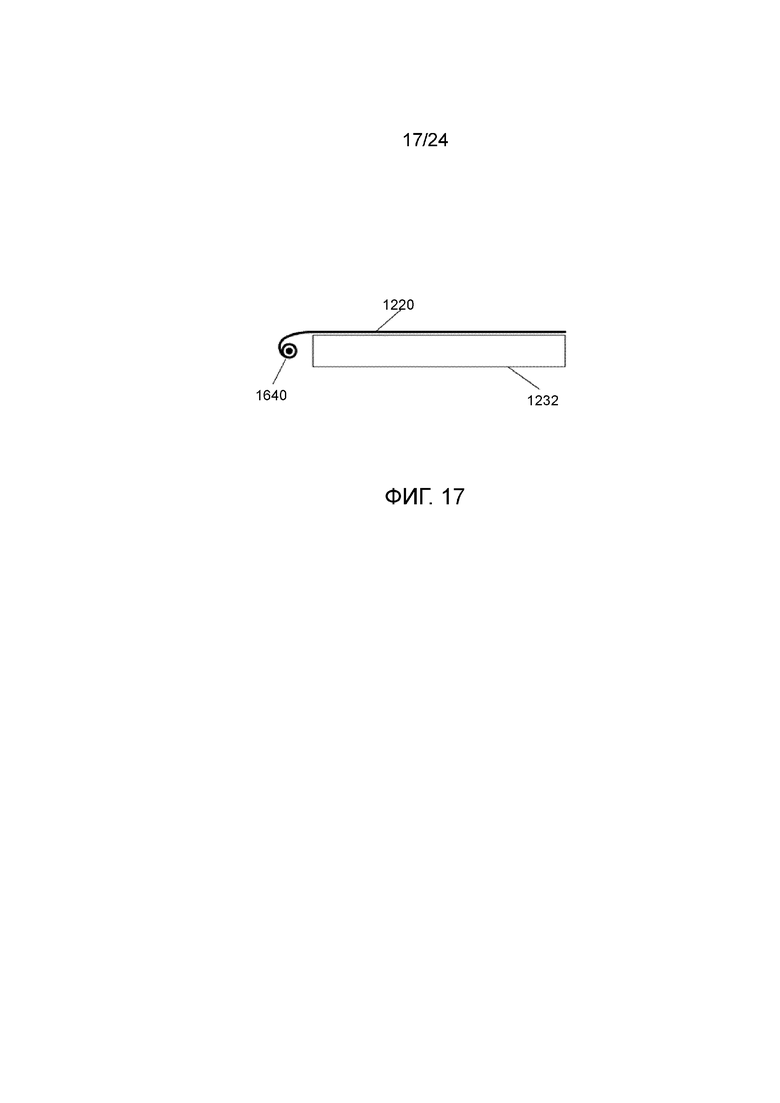
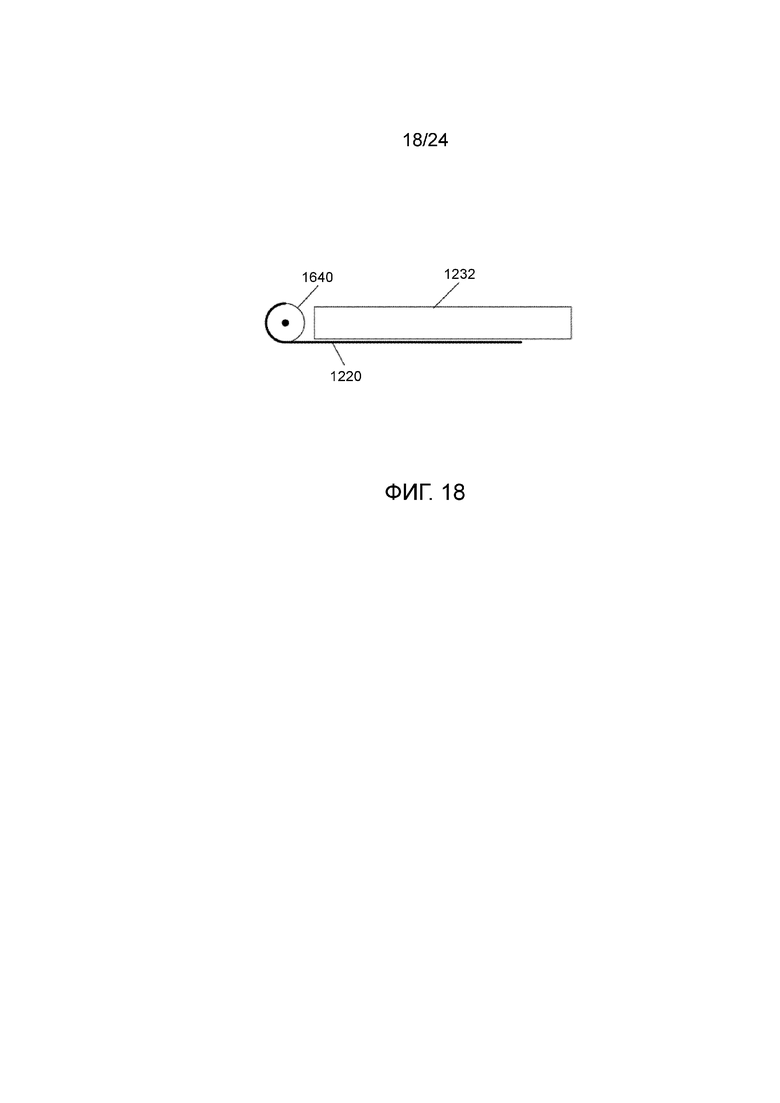
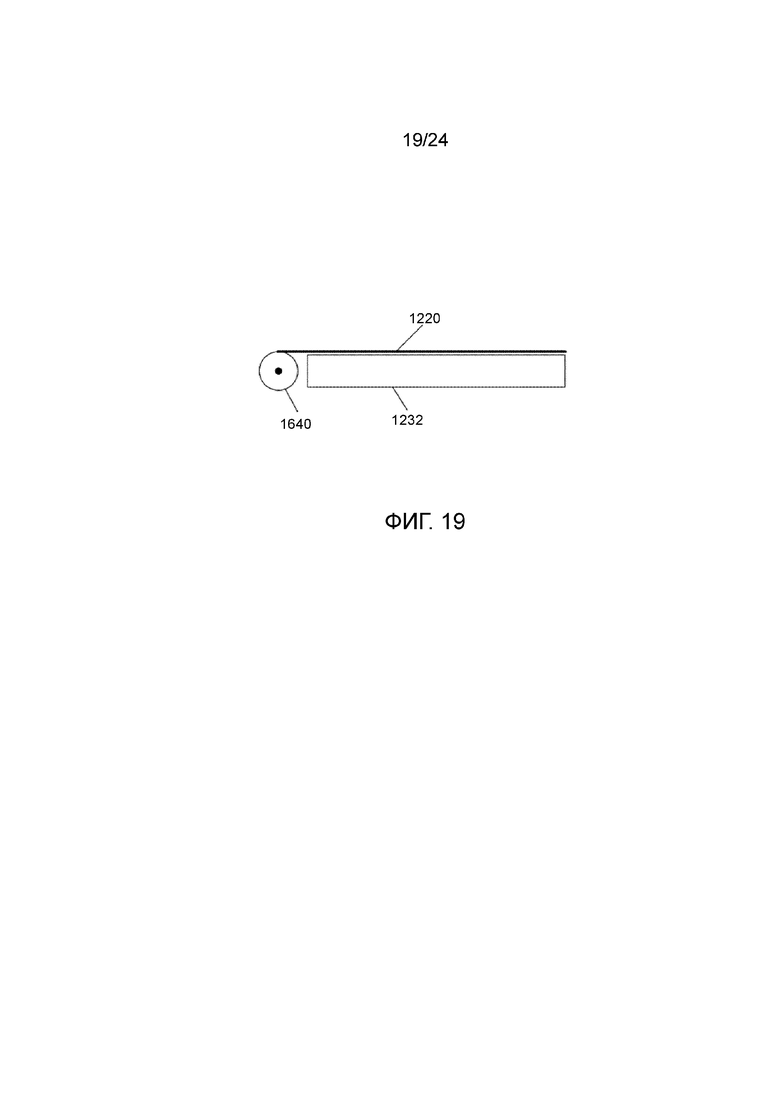
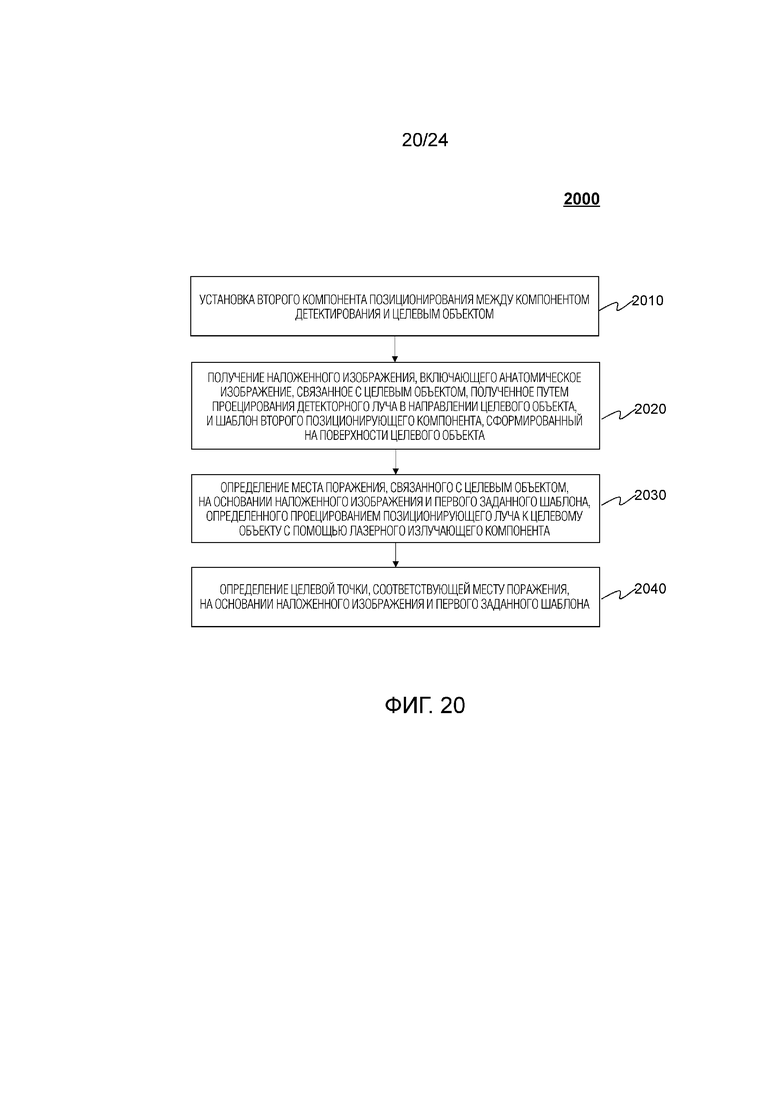
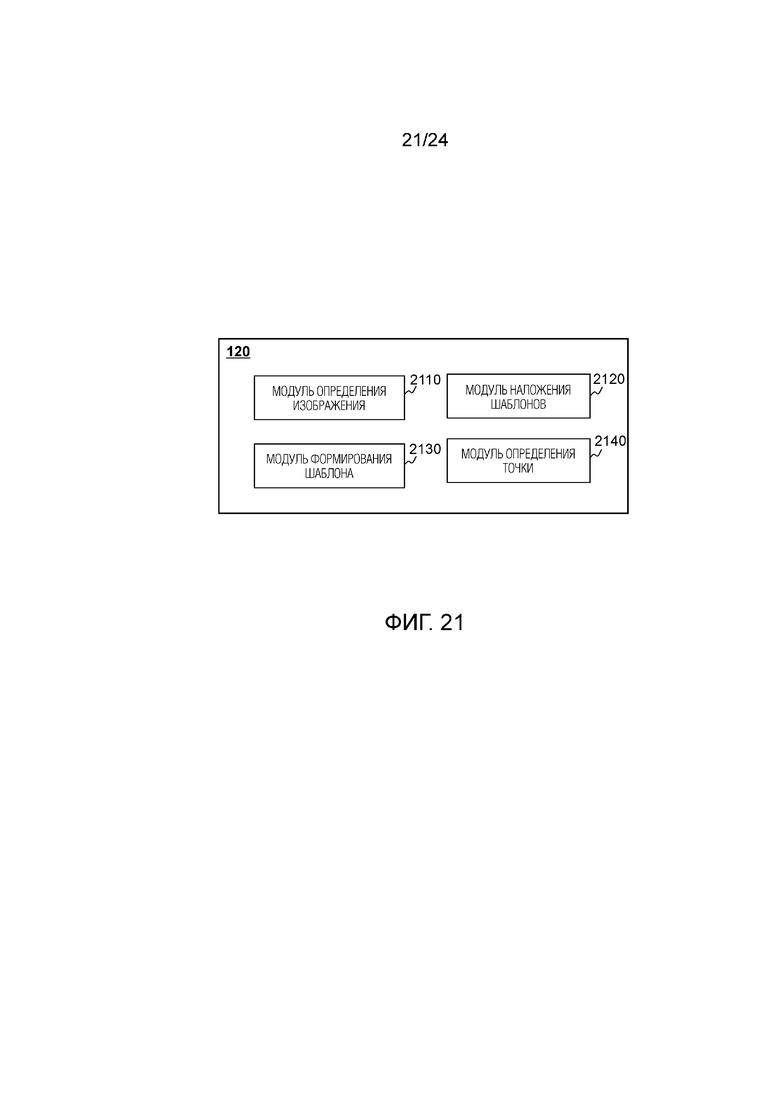
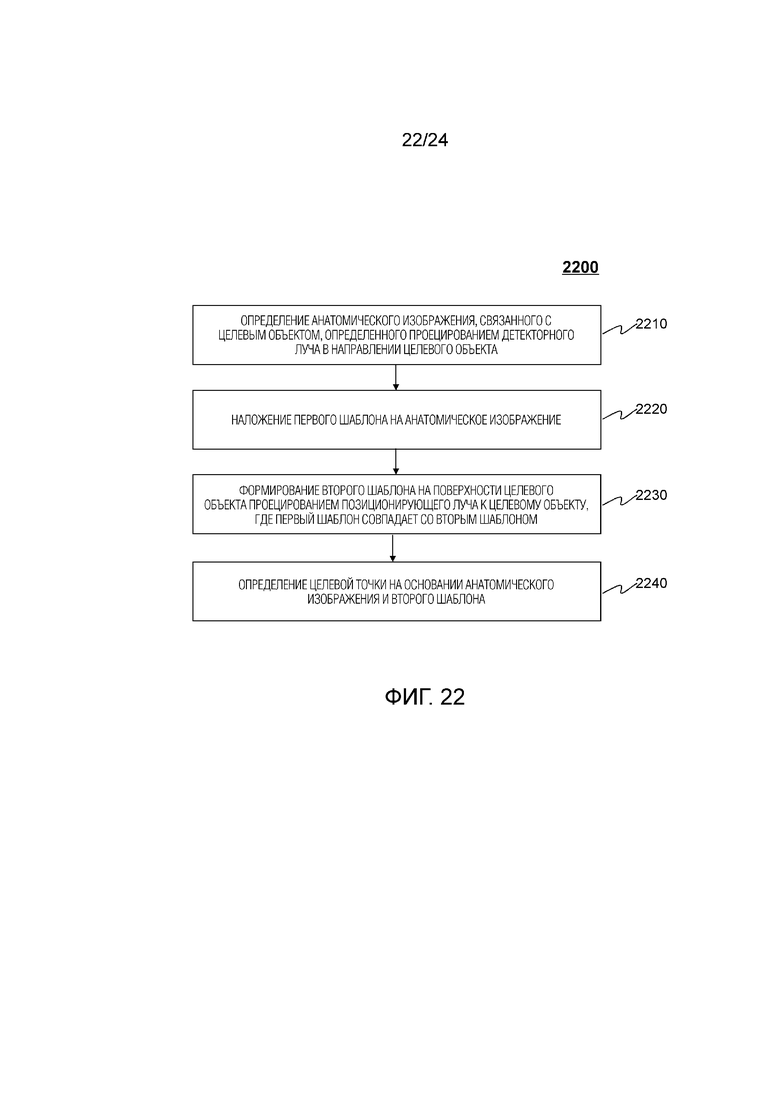
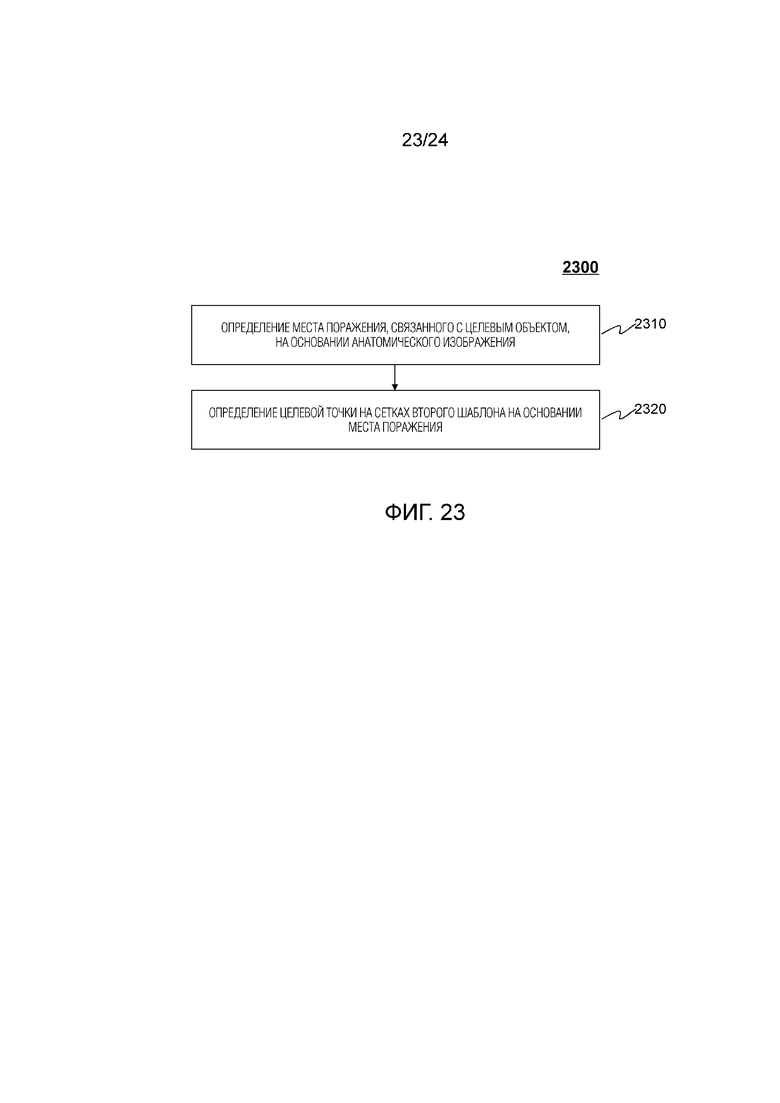
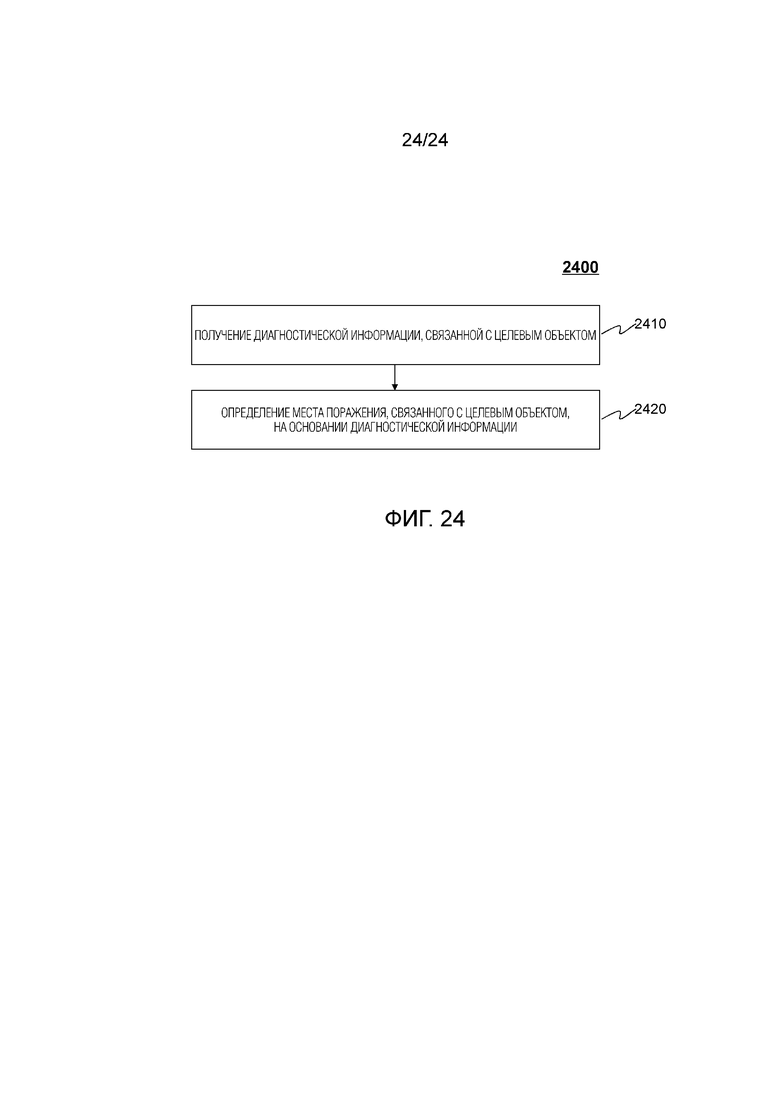
Группа изобретений относится к медицинской технике, а именно к системе и способу определения местоположения целевого объекта, связанного рентгеновской системой, и позволяет повысить эффективность определения местоположения целевого объекта. Рентгеновская система может включать источник рентгеновского излучения, компонент детектирования, дугу и платформу. Рентгеновская система также может включать первый компонент позиционирования, второй компонент позиционирования или третий компонент позиционирования. Первый компонент позиционирования может быть выполнен с возможностью определения целевой точки, где локализована область интереса (ROI) целевого объекта. Второй компонент позиционирования может быть выполнен с возможностью локализовать целевой объект. Третий компонент позиционирования может быть выполнен с возможностью получения информации о положении целевого устройства, связанного с целевым объектом, в режиме реального времени. 3 н. и 7 з.п. ф-лы, 24 ил.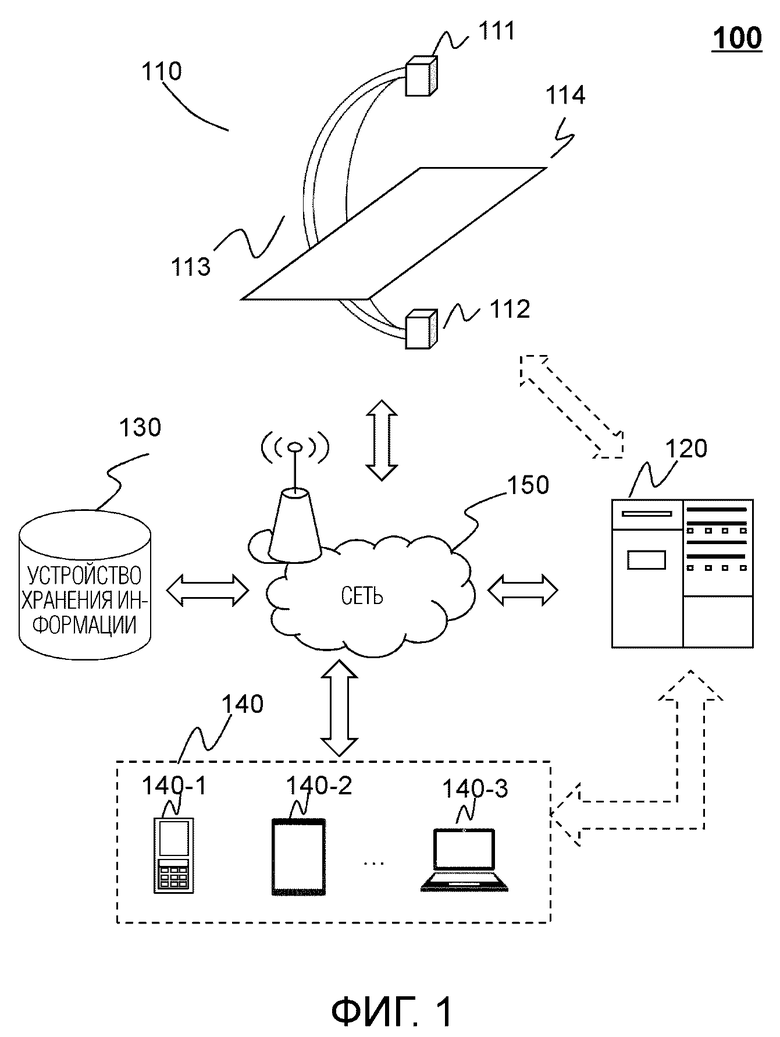
1. Рентгеновская система для определения местоположения целевого объекта при медицинской процедуре, включающая в себя:
источник рентгеновского излучения, выполненный с возможностью испускать пучок рентгеновского излучения в направлении целевого объекта;
компонент детектирования, выполненный с возможностью принимать по меньшей мере часть пучка рентгеновского излучения, которая проходит через целевой объект;
дугу, выполненную с возможностью поддерживать компонент детектирования и источник рентгеновского излучения;
платформу, выполненную с возможностью размещения целевого объекта, причем платформу помещают между источником рентгеновского излучения и компонентом детектирования;
лазерный излучающий компонент, выполненный с возможностью формирования второго шаблона на поверхности целевого объекта проецированием позиционирующего луча к целевому объекту, причем первый шаблон совпадает со вторым шаблоном; и
компонент позиционирования, выполненный с возможностью:
получать информацию о положении целевого устройства, связанного с целевым объектом, в режиме реального времени, при этом компонент позиционирования включает в себя по меньшей мере одну рельсовую направляющую и по меньшей мере два детектора позиционирования, и по меньшей мере одно расстояние между по меньшей мере двумя детекторами позиционирования регулируется путем скольжения по меньшей мере одного из по меньшей мере двух детекторов позиционирования по меньшей мере одной рельсовой направляющей.
2. Рентгеновская система по п. 1, в которой по меньшей мере одна рельсовая направляющая установлена на дуге.
3. Рентгеновская система по п. 1 или 2, в которой одна из по меньшей мере одной рельсовой направляющей включает в себя рельсовую направляющую возвратно-поступательного движения.
4. Способ позиционирования рентгеновской системы для определения местоположения целевого объекта при медицинской процедуре, причем рентгеновская система включает в себя источник рентгеновского излучения, компонент детектирования, дугу, платформу, компонент позиционирования и лазерный излучающий компонент, и способ позиционирования содержит:
инициирование установки компонента позиционирования между компонентом детектирования и целевым объектом;
получение наложенного изображения путем наложения анатомического изображения, связанного с целевым объектом, и первого шаблона компонента позиционирования, причем анатомическое изображение получают посредством проецирования, посредством источника рентгеновского излучения, детекторного луча в направлении целевого объекта;
определение места поражения, связанного с целевым объектом, на основании наложенного изображения; и
определение целевой точки, соответствующей месту поражения, на основании наложенного изображения и второго шаблона, который определен посредством проецирования позиционирующего луча к целевому объекту посредством лазерного излучающего компонента.
5. Способ позиционирования рентгеновской системы для определения местоположения целевого объекта при медицинской процедуре, причем рентгеновская система включает в себя источник рентгеновского излучения, компонент детектирования, дугу и платформу, и способ позиционирования содержит:
определение анатомического изображения, связанного с целевым объектом, посредством проецирования, посредством источника рентгеновского излучения, детекторного луча в направлении целевого объекта;
наложение первого шаблона на анатомическое изображение;
формирование второго шаблона на поверхности целевого объекта проецированием, посредством лазерного излучающего компонента, позиционирующего луча к целевому объекту, причем первый шаблон совпадает со вторым шаблоном; и
определение целевой точки на основании анатомического изображения и второго шаблона.
6. Способ позиционирования по п. 5, в котором второй шаблон содержит сетки, причем определение целевой точки на основании анатомического изображения и второго шаблона включает в себя:
определение места поражения, связанного с целевым объектом, на основании анатомического изображения; и
определение целевой точки на сетках второго шаблона на основании места поражения.
7. Способ позиционирования по п. 6, в котором первый шаблон содержит сетки, причем определение целевой точки на сетках второго шаблона на основании места поражения включает в себя:
определение соотношения между первыми точками на сетках первого шаблона и вторыми точками, соответствующими первым точкам, на сетках второго шаблона.
8. Способ позиционирования по любому из пп. 5-7, дополнительно содержащий:
маркировку целевой точки путем проецирования маркерного луча или позиционирующего луча к целевой точке.
9. Способ позиционирования по любому из пп. 5-8, дополнительно включающий в себя:
настройку позиционирующего луча на основании первого шаблона и второго шаблона.
10. Способ позиционирования по п. 9, в котором настройка позиционирующего луча на основании первого шаблона и второго шаблона включает в себя:
настройку позиционирующего луча, если второй шаблон не совпадает с первым шаблоном.
| CN 206183369 U, 24.05.2017 | |||
| DE 19717109 A1, 30.04.1998 | |||
| WO 2017134546 A2, 10.08.2017 | |||
| WO 2016122957 A1, 04.08.2016 | |||
| УСТРОЙСТВО ДЛЯ ВИЗУАЛИЗАЦИИ МОЛОЧНОЙ ЖЕЛЕЗЫ ПАЦИЕНТА РЕНТГЕНОВСКИМ ИЗЛУЧЕНИЕМ В РЕЖИМЕ ТОМОСИНТЕЗА ИЛИ МАММОГРАФИИ | 2014 |
|
RU2553505C1 |
