Изобретение относится к области радиолокации, в частности к устройствам определения параметров движения цели в бистатических радиолокационных системах.
Известно «Устройство для определения параметров движения цели» (Патент РФ №2168740, МПК G01S 13/06, опубл. 10.06.2001 г. Бюл. №16), содержащее передающую позицию и находящуюся в удаленной от нее точке приемную позицию, состоящую из антенны, приемного устройства, блока измерения доплеровской частоты, блока измерения направления прихода интерференционного сигнала, блока экстраполяции измеряемых параметров, блока вычисления момента времени пересечения целью линии базы, блока определения поверхности положения, блока вычисления траекторных параметров, блока деления опорного напряжения суммирующего устройства, блока идентификации сигналов по частоте и вычитания ложных сигналов.
Зондирующий непрерывный (немодулированный) сигнал, излучаемый передающей позицией имеющий широкую диаграмму направленности антенны (ДНА) в азимутальной плоскости принимается расположенной в удаленной точке антенной системой приемной позиции сформированной парциальными каналами. Принимаемый прямой сигнал передатчика и сигнал переотраженный от цели на выходе параллельных каналов образуют низкочастотные колебания интерференционных биений, которые поступают в блок измерения доплеровской частоты. В блоке измерения направления прихода интерференционного сигнала определяется угловая координата цели.
На основе измерений доплеровской частоты и угловых координат определяется экстраполированный момент времени пересечения целью линии базы до пролета целью этой линии. Определяются поверхности положения и с учетом измерений угловых координат происходит определение траекторных параметров цели. Пространственные координаты цели однозначно находятся как координаты точки пересечения поверхности положения и линии направления на цель из приемной позиции (линии пеленга).
Недостатком данного устройство является низкая точность определения параметров движения цели, обусловленная тем, что:
- экстраполяция доплеровской частоты и угловой координаты до момента пересечения целью линии базы производится в ряде случаев на значительное время, например, при полете цели под малыми углами к линии базы, что приводит к росту ошибок измерения суммарной дальности, а, следовательно, и к ошибкам определения наклонной дальности;
- при сопровождении интенсивно маневрирующих целей экстраполяция доплеровской частоты до момента пересечения целью линии базы осуществляется со значительными динамическими ошибками, поскольку отсутствует априорная информация об интенсивности маневра цели, а после пересечения целью линии базы интегрирование на длительное время также приводит к ошибкам определения дальности.
Известно «Устройство для определения параметров движения цели» (Патент на полезную модель РФ №107370, МПК G01S 13/06, опубл. 10.08.2011 г., Бюл. №22), содержащее передающую позицию, состоящую из передатчика и передающей антенны, и находящуюся в удаленной от нее точке приемную позицию, состоящую из приемной антенны, двух цепей, включающих в себя последовательно соединенные приемник, детектор и фильтр нижних частот блок вычисления траекторных параметров, первый блок измерения доплеровской частоты, передающая позиция содержит последовательно соединенные второй передатчик и блок суммирования, приемная позиция дополнительно содержит блок разделения, третью цепь, состоящую из последовательно соединенных приемника, детектора и фильтра нижних частот, блок разделения, измеритель разности фаз, блок оценки суммарной дальности, второй блок измерения доплеровской частоты, блок оценки скорости изменения направления прихода интерференционного сигнала, и блок масштабирования
Передающей позицией формируется два монохроматических зондирующих сигнала. Приемная позиция принимает сигналы, распространяющиеся вдоль линии базы и сигналы, прошедшие по пути передающая позиция - цель - приемная позиция. Фазовым методом определяется суммарная дальность, а на основании анализа доплеровских частот скорость изменения суммарной дальности. Оценка направления прихода интерференционного сигнала определяется фазовым методом, а угловая скорость направления прихода интерференционного сигнала определяется по измеренному значению доплеровской частоты и угловой координаты. В блоке вычисления траекторных параметров определяется дальность до цели относительно приемной позиции, при известной величине базы, суммарной дальности и угловой координате. Далее определяются прямоугольные координаты и скорости их изменения (проекции вектора скорости цели на оси прямоугольной системы координат).
Недостатком данного устройства является допущение об одинаковом значении скачка фаз на обеих частотах при переотражении сигнала от цели. Не выполнение этого допущения приводит к ошибкам определения координат. Кроме того, при распространении сигнала как вдоль линии базы, так и по линии передающая позиция - цели приемная позиция могут наблюдаться переотражения сигнала от земной поверхности, что также влияет на точность измерения разностей фаз, а следовательно и суммарной дальности. Применение монохроматичсеких сигналов обуславливает низкую скрытность и помехозащищенность системы.
Известно «Устройство для определения параметров движения цели» (Патент на полезную модель РФ №109869, МПК G01S 3/46, опубл. 27.10.2011 г. Бюл. №30), содержащее передающую позицию, состоящую из последовательно соединенных передатчика и антенны, и в удаленной от нее точке приемную позицию, которая состоит из антенны приемной позиции, имеющей N выходов, каждый из которых, кроме центрального, соединен с одним из входов соответствующего суммирующего устройства, выход которого соединен с соответствующим приемником, а центральный выход антенны соединен с блоком деления опорного напряжения, приемника центрального парциального канала, суммирующих устройств соответствующих парциальных каналов, блока определения азимутального положения диаграммы направленности антенны передающей позиции блока вычисления траекторных параметров, при этом передатчик передающей позиции содержит последовательно соединенные блок синхронизации, синтезатор частоты, усилитель мощности и блок управления лучом и блока вычисления траекторных параметров, выход которого является выходом всего устройства.
Антенна передающей позиции, осуществляя сканирование пространства в заданном секторе, излучает непрерывный (смодулированный) сигнал на различных частотах в определенные направления сектора пространства. В процессе обзора пространства при перемещении ДНА передающей позиции на определенный угол, происходит изменение частоты зондирующего сигнала формируемого передающей позицией. Таким образом, текущее значение несущей частоты зондирующего сигнала связано с угловым направлением зондирования передающей позиции. Прямой сигнал, образованный боковыми лепестками ДНА передающей позиции, принимается центральным (главным) лепестком ДНА приемных пространственных каналов приемной позиции. Он используется как опорный сигнал, анализируя значение частоты, которого можно определить направление излучения на передающей позиции. Блок измерения направления прихода интерференционного сигнала измеряет значение азимута цели относительно приемной позиции. В блоке вычисления траекторных параметров производится вычисление дальности до цели по результатам решения задачи триангуляции относительно приемной позиции определение прямоугольных координат цели.
Недостатком такого устройства является низкая скрытность и помехозащищенность устройства, обусловленная применением монохроматических сигналов, поскольку постановка помехи из зоны пространства на другой частоте может привести к ложному измерению пеленга относительно передающей позиции. В ряде областей пространства точность определения местоположения может снижаться, что вызвано спецификой геометрического фактора точности присущего триангуляционному способу определения координат. Кроме того, при значительном количестве целей в зоне обзора может возникнуть проблема пересечения ложных точек пересечения пеленгов.
Наиболее близким по технической сущности к заявляемому устройству является «Устройство для определения параметров движения цели» (Патент РФ №2584332, МПК G01S 3/00, опубл. 20.05.2016 г., Бюл. №14), содержащее передающую позицию, состоящую из последовательно соединенных передатчика и антенны, и в удаленной от нее точке приемную позицию, которая состоит из антенны приемной позиции, имеющей N выходов, где N - число парциальных взаимно перекрытых по уровню половинной мощности приемных пространственных каналов, каждый из выходов, кроме центрального, соединен с одним из входов соответствующего суммирующего устройства, выход которого соединен со входом соответствующего приемника, а центральный выход антенны соединен со входом блока деления опорного напряжения, имеющего N выходов, соответствующий выход которого соединен непосредственно с входом приемника центрального парциального канала, а остальные N-1 выходов соединены со вторыми входами суммирующих устройств соответствующих парциальных каналов, блока определения азимутального положения диаграммы направленности антенны передающей позиции, вход которого подключен ко второму выходу приемника центрального парциального канала, а выход подключен ко второму входу блока вычисления траекторных параметров, при этом передатчик передающей позиции содержит последовательно соединенные блок синхронизации, синтезатор частоты, усилитель мощности и блок управления лучом, второй вход которого соединен со вторым выходом блока синхронизации, а выход соединен с входом передающей антенны, при этом выходы приемника каждого из парциальных каналов раздельно соединены с соответствующими входами блока измерения направления прихода интерференционного сигнала, выход которого соединен с первым входом блока вычисления траекторных параметров, при этом введены последовательно соединенные блок измерения доплеровской частоты, блок экстраполяции измеряемых параметров (зависимостей частоты Доплера и углового направления на цель во времени), блок вычисления момента пересечения целью линии базы и блок определения поверхности положения, выход которого соединен с третьим входом блока вычисления траекторных параметров, а также блок расчета высоты полета цели, причем соответствующий вход блока измерения доплеровской частоты соединены с выходом соответствующего приемника, второй вход блока экстраполяции измеряемых параметров подключен к выходу блока измерения направления прихода интерференционного сигнала и к первому входу блока расчета высоты полета цели, связанному также с первым выходом блока вычисления траекторных параметров, второй вход блока определения поверхности положения соединен с выходом блока экстраполяции измеряемых параметров, второй вход блока расчета высоты полета цели соединен с выходом блока определения азимутального положения диаграммы направленности антенны передающей позиции, третий вход блока расчета высоты полета цели соединен с выходом блока вычисления траекторных параметров, а выход блока расчета высоты полета цели является выходом всего устройства.
Антенна передающей позиции, сканируя в заданном секторе, излучает непрерывный сигнал на различных частотах, причем каждому угловому направлению зондирования соответствует определенная несущая частота. Приемная позиция на основе анализа принятых колебаний определяет угол, под которым облучается цель. В блоке измерения направления прихода интерференционного сигнала формируется значение азимута цели относительно приемной позиции, а в блоке вычисления траекторных параметров производится вычисление дальности до цели по результатам решения задачи триангуляции относительно приемной позиции и оценка прямоугольных координат.
На основе измерений направления прихода интерференционного сигнала и доплеровской частоты, в блоке экстраполяции измеряемых параметров осуществляется экстраполяция функциональных зависимостей частоты Доплера и направления прихода интерференционного сигнала от времени. В блоке экстраполяции измеряемых параметров осуществляется экстраполяция измеренных значений доплеровской частоты и угла прихода интерференционного сигнала на момент пересечения целью линии базы. В блоке вычисления момента времени пересечения целью линии базы приближенно определяется экстраполированный момент времени пересечения целью линии базы до пролета целью этой линии. Далее устройство вычисляет суммарную дальность и высоту полета цели.
Недостатками известного устройства-прототипа являются: низкая точность измерения местоположения цели во всей области пространства возможного приема сигналов, временная задержка в получении оценки координат цели, а также низкая помехозащищенность.
Указанные недостатки обусловлены:
1. Получением оценки азимутального положения цели относительно передающей позиции по номеру углового положения диаграммы направленности антенны передающей позиции, определяемой по значению частоты монохроматического сигнала, излучаемого в этом положении. В результате точность измерения определяется шириной этой диаграммы направленности.
2. Необходимостью выполнять экстраполяцию траектории движения цели с возможными ошибками, возникающими при ее маневрировании, что также приводит к задержке в определении координат.
3. Существенной зависимостью точности измерения местоположения цели от ее положения относительно линии базы, при приближении к этой линии измерение становится невозможным.
4. Применением в прототипе монохроматического излучаемого сигнала, что предопределяет низкую скрытность работы, а, следовательно, низкую помехоустойчивость его работы по отношению к прицельным по частоте помехам, что в совокупности приводит к низкой помехозащищенности.
Основной задачей, на которую направлено заявляемое изобретение, является создание устройства позволяющего измерять местоположение цели в области возможного приема сигналов с большей точностью.
Техническим результатом является повышение точности определения местоположения цели во всей области возможного приема сигналов и увеличение помехозащищенности работы просветной РЛС.
Указанный технический результат достигается тем, что в устройство, содержащее передающую позицию, состоящую из передатчика, выход которого соединен с входом передающей антенны и находящуюся в удалении от источника излучения приемную позицию состоящую из приемной антенны, первого и второго сумматоров, выходы которых соединены соответственно с входами первого и второго приемников, а также угловой дискриминатор и блок вычисления траекторных параметров, дополнительно введены вторая приемная антенна, последовательно соединенные первый блок фазовращателей, третий сумматор, третий приемник, согласованный фильтр, первый обнаружитель и блок вычисления ΔR, выход которого соединен со вторым входом блока вычисления траекторных параметров, третий вход которого является входом подачи значения дальности L, входы первого блока фазовращателей подключены к выходам приемной антенны, второй и третий блоки фазовращателей, входы которых соединены с выходами второй приемной антенны, а выходы - с входами первого и второго сумматоров, первый и второй управляемые согласованные фильтры, первые входы которых соединены соответственно с выходами первого и второго приемников, а выходы - с входами углового дискриминатора, последовательно соединенные четвертый сумматор, четвертый приемник, блок согласованных фильтров и блок выбора максимума, первый и второй выходы которого соединены с первыми входами первого и второго ключей соответственно, третий выход соединен с входом второго обнаружителя, выход которого соединен со вторыми входами первого, второго, третьего, четвертого ключей и вторым входом блока вычисления ΔR, причем, первый и второй входы четвертого сумматора подключены к выходам первого и второго сумматоров соответственно, блок выработки управляющих напряжений, первый выход которого соединен со вторыми входами первого и второго управляемых согласованных фильтров, второй выход соединен с третьими входами первого и второго управляемых согласованных фильтров, выходы первого и второго ключей соединены с первым и вторым входами блока выработки управляющих напряжений соответственно и четвертым и пятым входами блока вычисления траекторных параметров, выход углового дискриминатора соединен с входом третьего ключа, выход которого соединен с первым входом блока вычисления траекторных параметров, выход которого соединен с первым входом четвертого ключа, выход которого является выходом всего устройства, второй выход передатчика соединен со вторым входом передающей антенны.
Передатчик, содержит синтезатор частоты, первый усилитель мощности, выход которого является первым выходом передатчика и соединен с первым входом передающей антенны, дополнительно введены первый и второй фазовращатели, входы которых подключены к выходу синтезатора частоты, а выходы, соответственно, к первым входам первого и второго ключевых каскадов, вторые входы которых соединены с выходом генератора пседослучайной последовательности, выход первого ключевого каскада подключен к входу первого усилителя мощности, а выход второго ключевого каскада через второй усилитель мощности, выход которого является вторым выходом передатчика, подключен к второму входу передающей антенны.
Первый управляемый согласованный фильтр содержит линию задержки с отводами, вход которой является первым входом первого управляемого согласованного фильтра, а ее выходы подключены к соответствующим им по номеру входам блока управляемых фазовращателей частотной настройки, вход управления которого является третьим входом первого управляемого согласованного фильтра, часть выходов блока управляемых фазовращателей частотной настройки подключены к соответствующим им по номеру входам первого сумматора, первого управляемого согласованного фильтра, выход которого через первый управляемый фазовращатель азимутальной настройки первого управляемого согласованного фильтра подключен к первому входу третьего сумматора первого управляемого согласованного фильтра, другая часть выходов блока управляемых фазовращателей частотной настройки соединена с соответствующими им по номеру входами второго сумматора первого управляемого согласованного фильтра, выход которого соединен со вторым входом третьего сумматора первого управляемого согласованного фильтра через последовательное соединенные фазовращатель на «π» и второй управляемый фазовращатель азимутальной настройки первого управляемого согласованного фильтра, выход которого является выходом первого управляемого согласованного фильтра, входы управления первого и второго управляемых фазовращателей азимутальной настройки первого управляемого согласованного фильтра соединены с его вторым входом;
Блок согласованных фильтров содержит линию задержки с отводами, вход которой является входом блока согласованных фильтров, а выходы подключены к совпадающим им по номеру входам N блоков фазовращателей частотной настройки N, часть выходов которых подключены к соответствующим им по номеру входам N первых сумматоров, выходы которых подключены к соответствующим им по номеру N первым блокам фазовращателей настройки на М направлений, другая часть выходов каждого из N блоков фазовращателей частотной настройки подключена к соответствующим им по номеру входам вторых сумматоров, выход каждого из которых через соответствующий фазовращатель на «π» соединены с соответствующими им по номеру входами вторых блоков фазовращателей настройки на М направлений, М выходов каждого из первых блоков фазовращателей настройки на М направлений подключены к соответствующим им по номеру первым входам М двухвходовых сумматоров, вторые входы каждого из которых соединены с соответствующими им по номеру выходами вторых блоков фазовращателей настройки на М направлений, выходы каждого из которых подключены к входам М амплитудных детекторов, выходы которых являются выходами всего блока согласованных фильтров.
Технический результат достигается за счет введения новых блоков и связей между ними, которые позволяют:
- разделять сигналы, проходящие путь от передающей к приемной позиции напрямую - (прямой сигнал) и отраженного от цели, проходящего путь - передающая позиция - цель - приемная позиция, используя введенную вторую приемную антенну, включенные на ее выходе второй блок фазовращателей и третий блок фазовращателей, также последовательно соединенные - первый блок фазовращателей, третий сумматор, третий приемник, согласованный фильтр, первый обнаружитель и блок вычисления ΔR разности расстояний;
- использовать для измерения азимутального направления на цель относительно передающей позиции сложный пространственно-временной (П-В) фазоманипулированный (ФМ) излучаемый сигнал, получаемый за счет введения в передатчик передающей позиции, новых блоков таких как: генератор ПСП, первый фазовращатель, второй фазовращатель, первый ключевой каскад, второй ключевой каскад, второй усилитель мощности и связей между ними, что позволило обеспечить измерения местоположение цели в области возможного приема сигналов с большей точностью и увеличение помехозащищенности работы просветной РЛС;
- получать более точную оценку угловой координаты цели относительно передающей позиции используя вновь введенные последовательно соединенные четвертый сумматор, четвертый приемник, блок согласованных фильтров, блок выбора максимума, второй обнаружитель;
- получать более точную оценку угла цели относительно приемной позиции использую вновь введенные первый ключ, второй ключ и блок выработки управляющих напряжений, введенные первый управляемый согласованный фильтр, второй управляемый согласованный фильтр, а также первый ключ, второй ключ и блок выработки управляющих напряжений;
- получать, за счет вновь введенных блоков и связей между ними, оценки местоположения цели без применения режима экстраполяции траектории движения цели практически за один период излучаемой передающей позицией псевдослучайной последовательности (ПСП) или одного импульса сложного ФМ сигнала при импульсном излучении, а также позволяет точно определять разность расстояний ΔR, проходящих прямым и переизлученным целью сигналами, за один период ПСП или одного импульса сложного ФМ сигнала, что увеличивает область точного измерения координат цели. Это особенно важно при приближении траектории цели к линии, соединяющей передающую и приемную позиции.
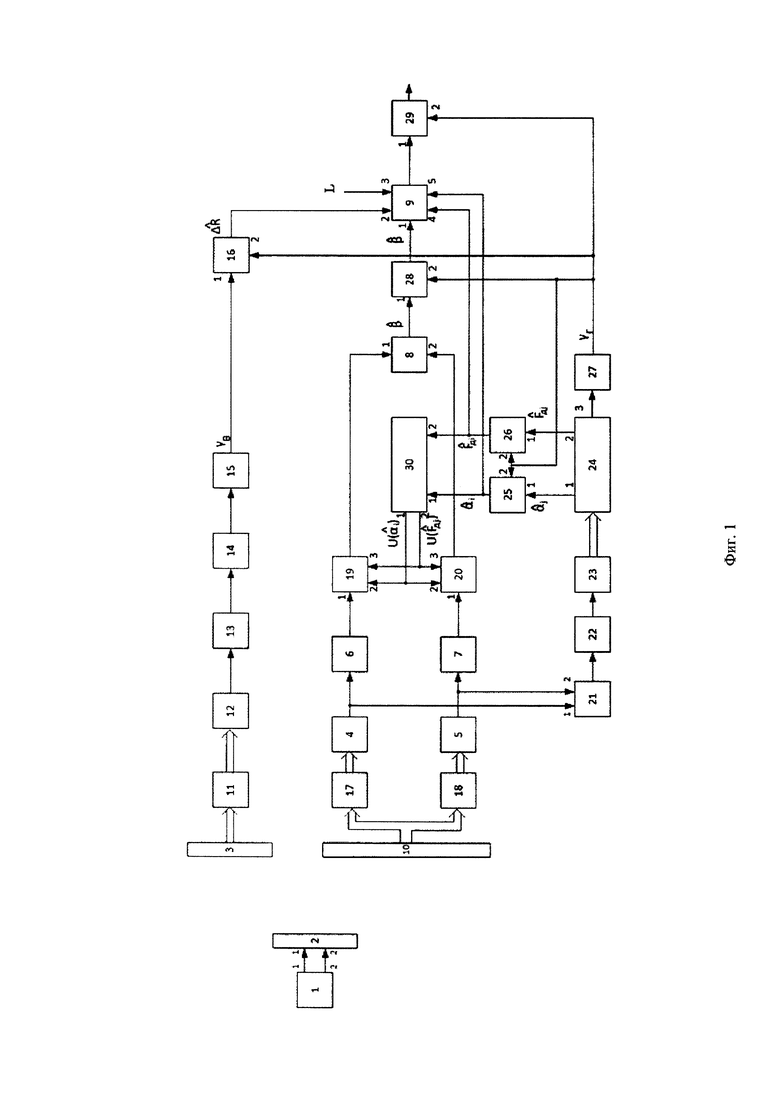
Сущность изобретения поясняется чертежами, где на фиг. 1 изображена структурная схема заявляемого устройства и введены следующие обозначения:
1 - передатчик;
2 - передающая антенна;
3 - приемная антенна;
4- первый сумматор;
5 - второй сумматор;
6 - первый приемник;
7- второй приемник;
8 - угловой дискриминатор;
9 - блок вычисления траекторных параметров;
10 - вторая приемная антенна;
11 - первый блок фазовращателей;
12 - третий сумматор;
13 - третий приемник;
14 - согласованный фильтр;
15 - второй блок фазовращателей;
18 - третий блок фазовращателей;
19 - первый управляемый согласованный фильтр;
20 - второй управляемый согласованный фильтр;
21 - четвертый сумматор;
22 - четвертый приемник;
23 - блок согласованных фильтров;
24 - блок выбора максимума;
25 - первый ключ;
26 - второй ключ;
27 - второй обнаружитель;
28 - третий ключ;
29 - четвертый ключ;
30 - блок выработки управляющих напряжений;
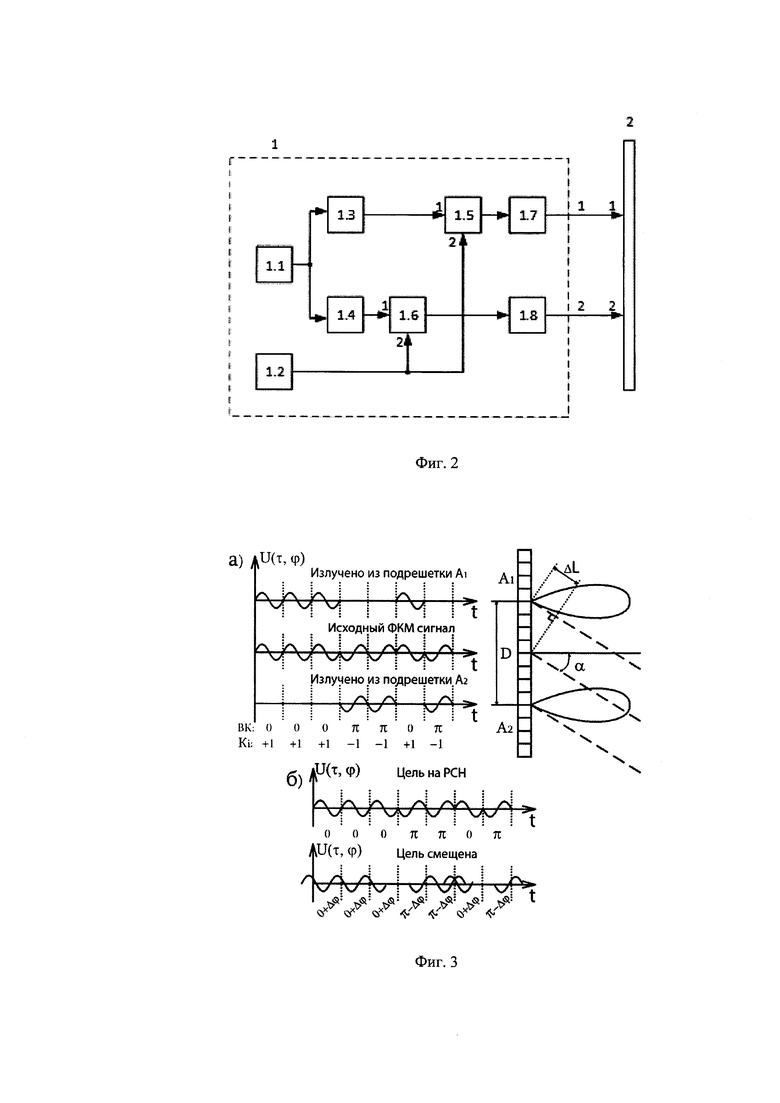
на фиг.2 изображена структурная схема передатчика и введены следующие обозначения:
1 - передатчик;
1.1 -синтезатор частоты;
1.2- генератор ПСП;
1.3 - первый фазовращатель;
1.4 - второй фазовращатель;
1.5 -первый ключевой каскад;
1.6 - второй ключевой каскад;
1.7 - первый усилитель мощности;
1.8 - второй усилитель мощности;
2 - передающая антенна;
на фиг. 3 - изображено формирование излучаемого П-В сигнала на примере семиэлементного кода Баркера;
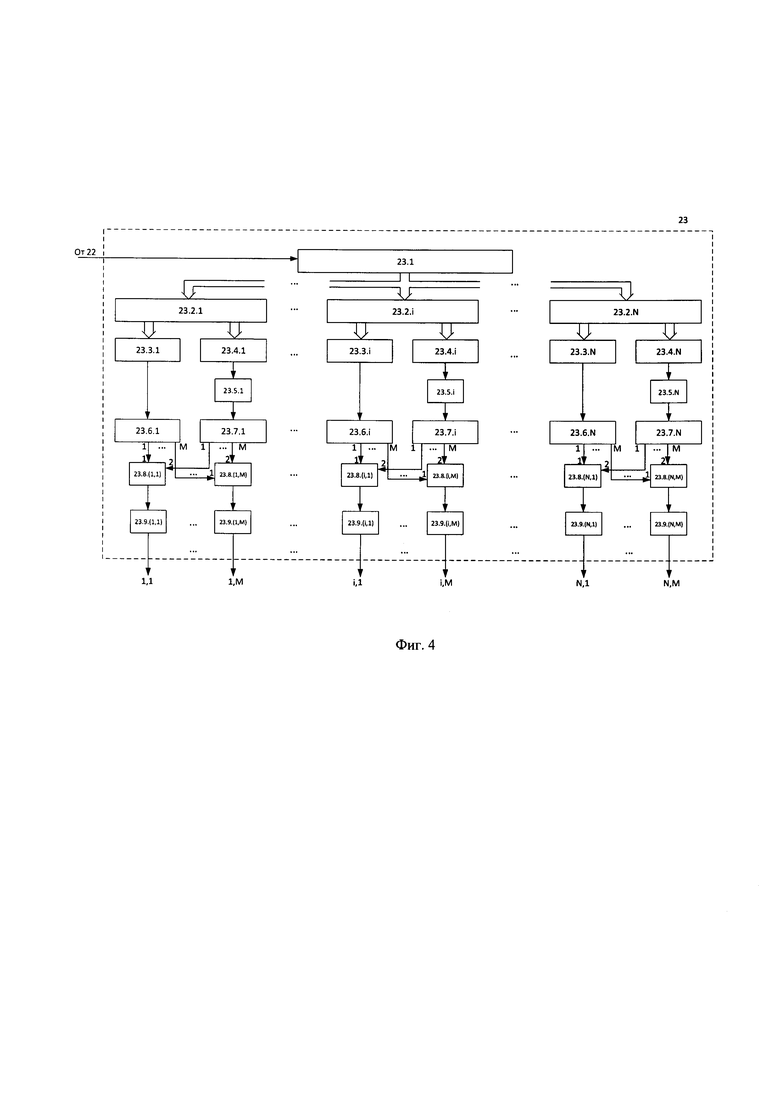
на фиг. 4 представлен вариант реализации блока согласованных фильтров (СФ) и введены следующие обозначения:
23 - блок согласованных фильтров;
23.1 - линия задержки с отводами;
23.2i - i-ый блок ФВ частотной настройки, i=1÷N;
23.3i - i-ый первый сумматор блока ФВ частотной настройки, i=1÷N;
23.4i - i-ый второй сумматор блока ФВ частотной настройки, i=1÷N;
23.5i -i-ый ФВ на «π», i=1÷N;
23.6i - i-ый первый блок ФВ настройки на М направлений, i=1÷N;
23.7i - i-ый второй блок ФВ настройки на М направлений, i=1÷N;
23.8.(i.j) -(i.j)-ый двухвходовый сумматор, i=1÷N, j=1÷M;
23.9.(i.j) - (i.j)-ый амплитудный детектор, i=1÷N, j=1÷M;
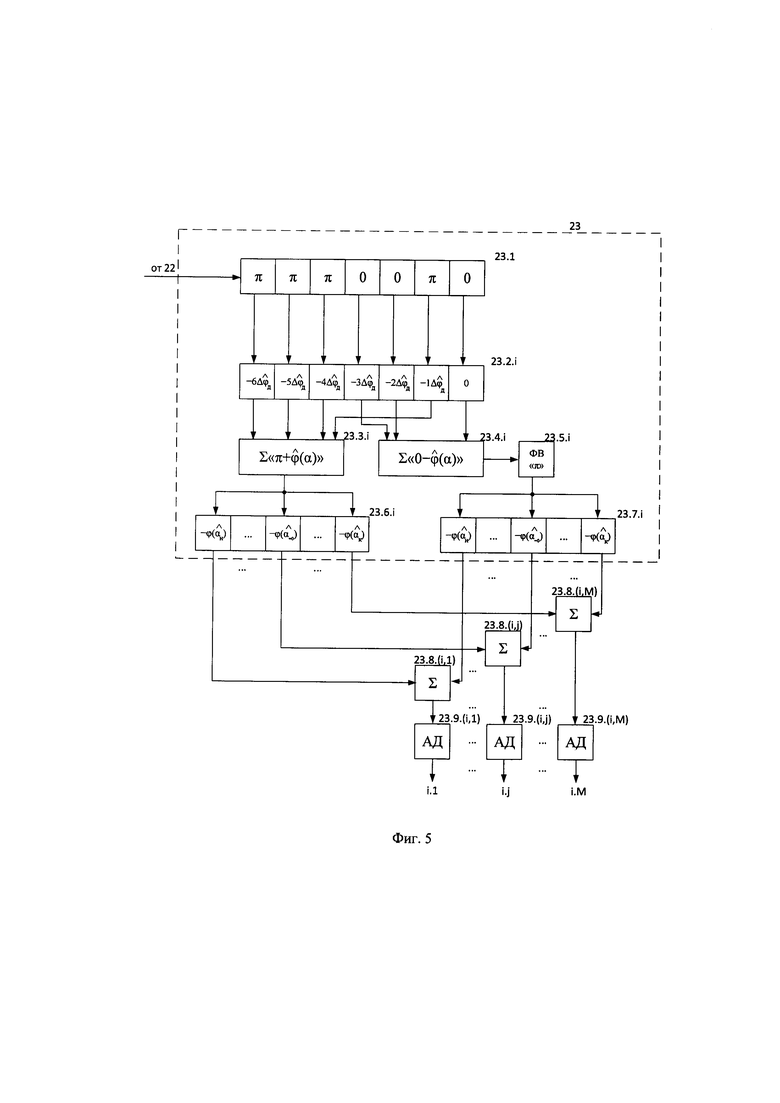
на фиг. 5 изображен вариант аналоговой реализации одного i-го частотного канала с настройкой на М направлений возможного прихода сигнала от цели блока СФ 23 для 7-ми элементного кода Баркера,
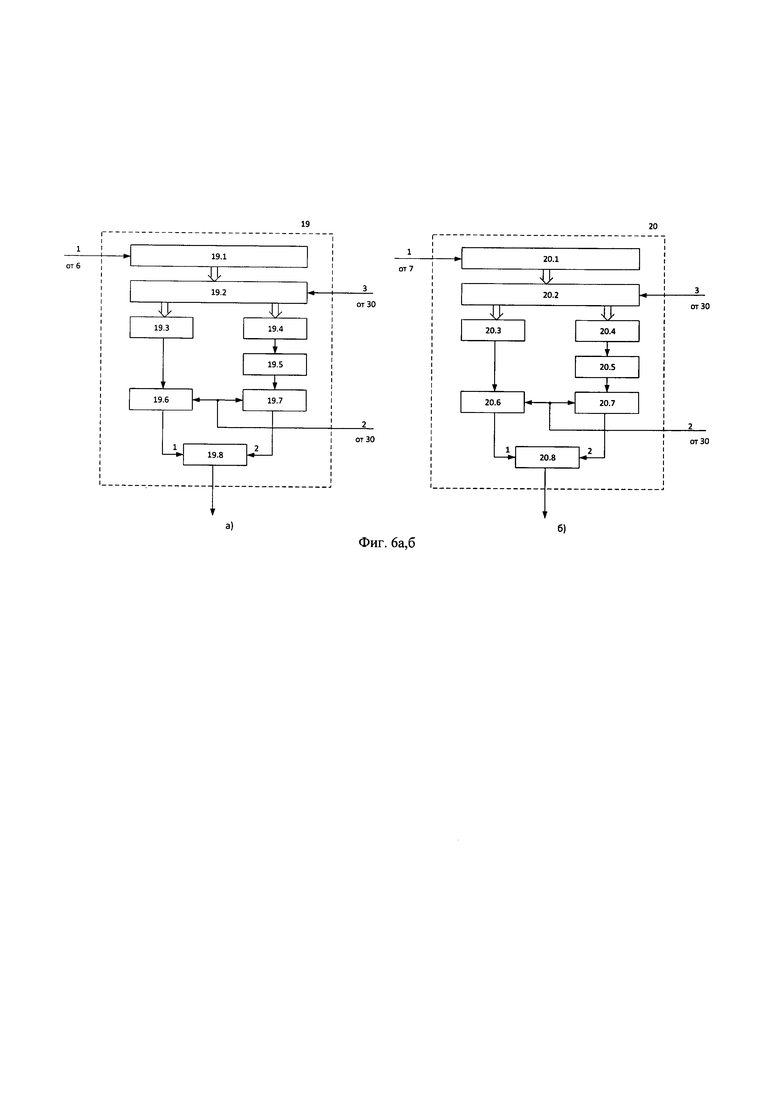
на фиг. 6а, б изображен вариант аналоговой реализации управляемых согласованных фильтров (СФ) 19 и 20 и введены обозначения:
19 - первый управляемый согласованный фильтр;
19.1 - линия задержки;
19.2 - блок управляемых фазовращателей (ФВ) частотной настройки;
19.3 - первый сумматор первого управляемого согласованного фильтра;
19.4 - второй сумматор первого управляемого согласованного фильтра;
19.5 - ФВ на «π»;
19.6 - первый управляемый ФВ азимутальной настройки;
19.7 - второй управляемый ФВ азимутальной настройки;
19.8 - третий сумматор первого управляемого согласованного фильтра;
20 - второй управляемый согласованный фильтр;
20.1 - линия задержки;
20.2 - блок управляемых ФВ частотной настройки;
20.3 - первый сумматор второго управляемого согласованного фильтра;
20.4 - второй сумматор второго управляемого согласованного фильтра;
20.5 - ФВ на «π»;
20.6 - первый управляемый ФВ азимутальной настройки;
20.7 - второй управляемый ФВ азимутальной настройки;
20.8 - третий сумматор второго управляемого согласованного фильтра;
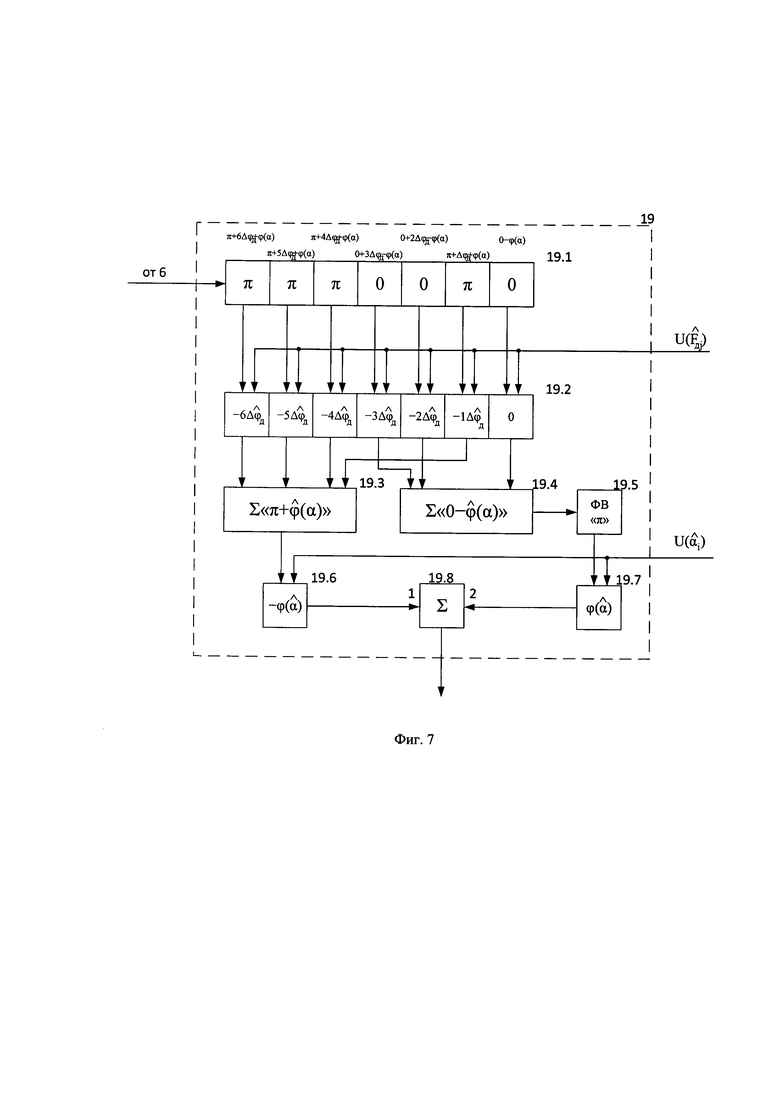
на фиг. 7 изображен вариант реализации одного из управляемых СФ для 7-ми элементного кода Баркера,
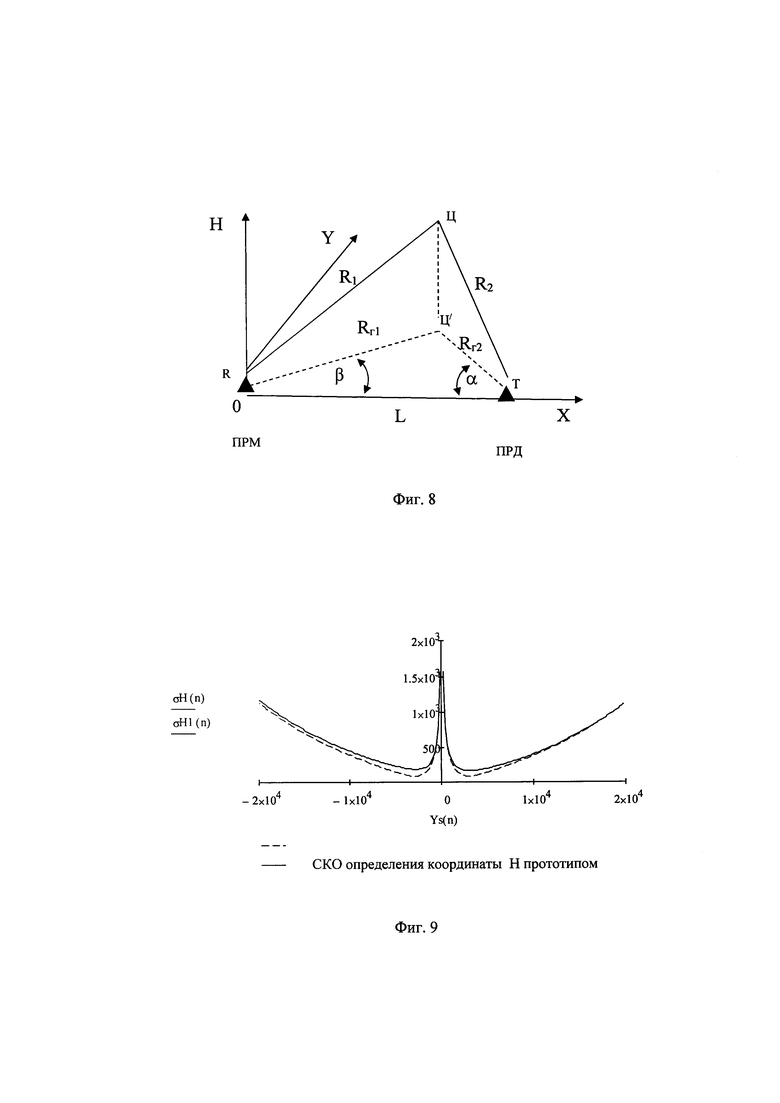
на фиг. 8 приведены геометрические соотношения для определения местоположения цели для двухпозиционной просветной РЛС,
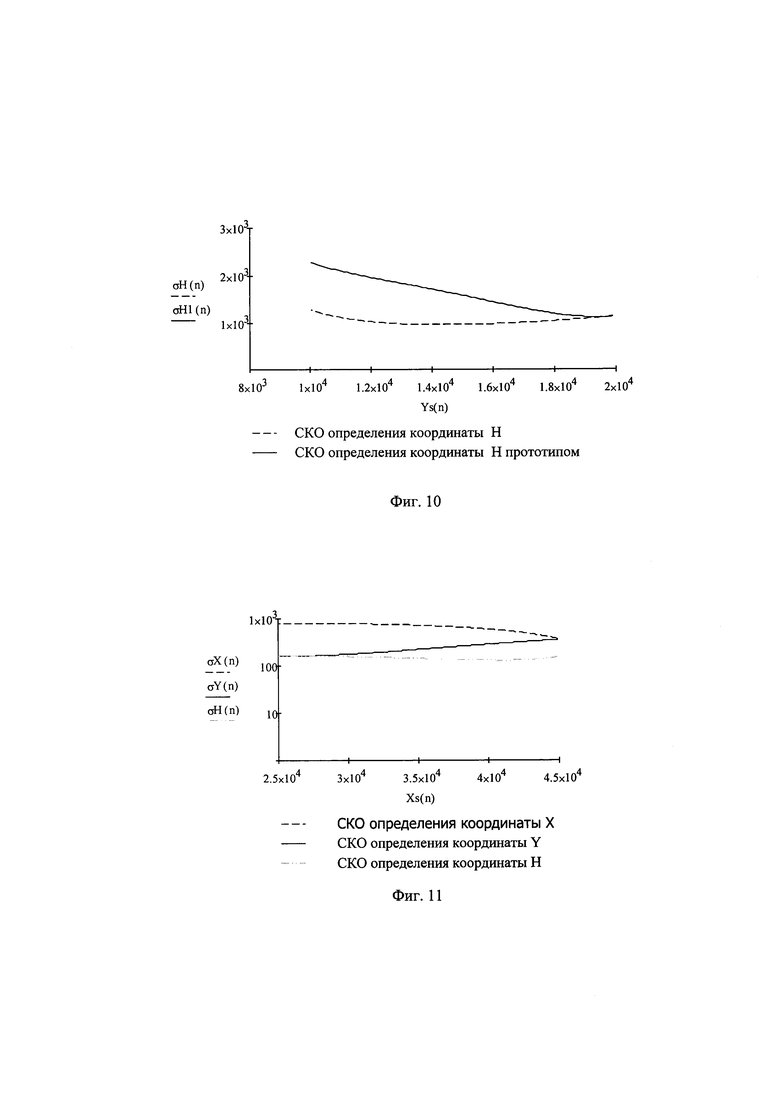
на фиг. 9 приведены значения СКО определения высоты полета цели при величине базы L=50 км, цель совершает прямолинейный полет на высоте 5000 м перпендикулярно к линии базы со скоростью 200 м/с с начальными координатами Х=20 км, Y=15 км.
на фиг. 10 приведены значения СКО определения высоты полета цели при тех же условиях (фиг. 9), но цель летит под углом к линии базы 60 град.
на фиг. 11 приведены СКО определения координат при полете цели параллельно оси X (линии базы) при Хо=45000 м, Yo=5000 м.
на фиг.12 приведены СКО определения координат при полете цели параллельно оси X (линии базы) при Хо=45000 м, Yo=500 м.
Устройство для определения параметров движения цели содержит передающую позицию, состоящую из передатчика 1, выход которого соединен с входом передающей антенны 2 и находящуюся в удалении от источника излучения приемную позицию состоящую из приемной антенны 3, первого 4 и второго 5 сумматоров, выходы которых соединены соответственно с входами первого 6 и второго 7 приемников, а также угловой дискриминатор 8 и блок вычисления траекторных параметров 9, вторую приемную антенну 10, последовательно соединенные первый блок фазовращателей 11, третий сумматор 12, третий приемник 13, согласованный фильтр 14, первый обнаружитель 15 и блок вычисления ΔR 16, выход которого соединен со вторым входом блока вычисления траекторных параметров 9, третий вход которого является входом подачи значения дальности L, входы первого блока фазовращателей 11 подключены к выходам приемной антенны 3, второй 17 и третий 18 блоки фазовращателей, входы которых соединены с выходами второй приемной антенны 10, а выходы - с входами первого 4 и второго 5 сумматоров, первый 19 и второй 20 управляемые согласованные фильтры, первые входы которых соединены соответственно с выходами первого 6 и второго 7 приемников, а выходы с входами углового дискриминатора 8 последовательно соединенные четвертый сумматор 21, четвертый приемник 22, блок согласованных фильтров 23 и блок выбора максимума 24, первый и второй выходы которого соединены с первыми входами первого 25 и второго 26 ключей, третий выход соединен с входом второго обнаружителя 27, выход которого соединен со вторыми входами первого 25, второго 26, третьего 28, четвертого 29 ключей и вторым входом блока вычисления ΔR 16, причем, первый и второй входы четвертого сумматора 21 подключены к выходам первого 4 и второго 5 сумматоров соответственно, блок выработки управляющих напряжений 30, первый выход которого соединен со вторыми входами первого 19 и второго 20 управляемых согласованных фильтров, второй выход соединен с третьими входами первого 19 и второго 20 управляемых согласованных фильтров, выходы первого 25 и второго 26 ключей соединены с первым и вторым входами блока выработки управляющих напряжений 30 соответственно и четвертым и пятым входами блока вычисления траекторных параметров 9 выход углового дискриминатора 8 соединен с первым входом третьего ключа 28, выход которого соединен с первым входом блока вычисления траекторных параметров 9, выход которого соединен с первым входом четвертого ключа 29, выход которого является выходом всего устройства, второй выход передатчика 1 соединен со вторым входом передающей антенны 2.
Передатчик 1, содержит синтезатор частоты 1.1, первый усилитель мощности 1.7, выход которого является первым выходом передатчика 1 и соединен с первым входом передающей антенны 2, дополнительно введены первый 1.3 и второй 1.4 фазовращатели, входы которых подключены к выходу синтезатора частоты 1.1, а выходы, соответственно, к первым входам первого 1.5 и второго 1.6 ключевых каскадов, вторые входы которых соединены с выходом генератора псевдослучайной последовательности 1.2, выход первого ключевого каскада 1.5 подключен к входу первого усилителя мощности 1.7, а выход второго ключевого каскада 1.6 через второй усилитель мощности 1.8, выход которого является вторым выходом передатчика 1, подключен к второму входу передающей антенны 2;
Первый управляемый согласованный фильтр 19 содержит линию задержки 19.1 с отводами, вход которой является первым входом первого управляемого согласованного фильтра 19, а ее выходы подключены к соответствующим им по номеру входам блока управляемых фазовращателей частотной настройки 19.2, вход управления которого является третьим входом первого управляемого согласованного фильтра 19, часть выходов блока управляемых фазовращателей частотной настройки 19.2 подключены к соответствующим им по номеру входам первого сумматора первого управляемого согласованного фильтра 19.3, выход которого через первый управляемый фазовращатель азимутальной настройки первого управляемого согласованного фильтра 19.6 подключен к первому входу третьего сумматора первого управляемого согласованного фильтра 19.8, другая часть выходов блока управляемых фазовращателей частотной настройки 19.2 соединена с соответствующими им по номеру входами второго сумматора первого управляемого согласованного фильтра 19.4, выход которого соединен со вторым входом третьего сумматора первого управляемого согласованного фильтра 19.8 через последовательное соединенные фазовращатель на «π» 19.5 и второй управляемый фазовращатель азимутальной настройки первого управляемого согласованного фильтра 19.7, выход которого является выходом первого управляемого согласованного фильтра 19, входы управления первого 19.6 и второго 19.7 управляемых фазовращателей азимутальной настройки первого управляемого согласованного фильтра 19 соединены с его вторым входом;
Блок согласованных фильтров 23 содержит линию задержки с отводами 23.1, вход которой является входом блока согласованных фильтров 23, а выходы подключены к совпадающим им по номеру входам N блоков фазовращателей частотной настройки 23.2.1, …, 23.2.i, …, 23.2.N, часть выходов которых подключены к соответствующим им по номеру входам N первых сумматоров 23.3.1, …, 23.3i, …, 23.3.N, выход которых подключены к соответствующим им по номеру N первым блокам фазовращателей настройки на М направления 23.6.1, … 23.6.i, … 23.6.N, другая часть выходов каждого из N блоков фазовращателей частотной настройки 23.2.1, …, 23.2.i, …, 23.2.N подключена к соответствующим им по номеру входам вторых сумматоров 23.4.1, …, 23.4.i, …, 23.4.N, выход каждого из которых через соответствующий фазовращатель на «π» 23.5.1, …, 23.5.i, …, 23.5.N соединены с соответствующими им по номеру входами вторых блоков фазовращателей настройки на М направлений 23.7.1, …, 23.7.i, …, 23.7.N, М выходов каждого из первых блоков фазовращателей настройки на М направлений 23.6.1, …, 23.6.i, …, 23.6.N подключены к соответствующим им по номеру первым входам М двухвходовых сумматоров 23.8.(1,1)÷23.8.(1,М), …, 23.8.(i,1)÷23.8.(i,M), …, 23.8.(N,1)÷23.8.(N,M), вторые входы каждого из которых соединены с соответствующими им по номеру выходами вторых блоков фазовращателей настройки на М направлений 23.7.1, …, 23.7.i, …, 23.7.N, выходы каждого из которых подключены к входам М амплитудных детекторов 23.9.(1,1)÷23.9.(1,М), …, 23.9.(i,1)÷23.9.(i,M), …, 23.9.(N,1)÷23.9.(N,M), выходы которых являются выходами всего блока согласованных фильтров 23.
Передатчик 1 содержит ряд блоков имеющих стандартный вариант реализации и может быть выполнен, например, как показано в [1].
Первый 4, второй 12 и третий 17 блоки фазовращателей могут быть выполнены как показано в [2].
Передающая антенна 2, могут быть выполнена, как показано в [3]. Приемная антенна 3 и вторая приемная антенна 10 могут быть выполнены, как показано в [4].
Первый 6, второй 7, третий 13 и четвертый 22 приемники могут быть выполнены как в [5].
Первый ключ 25, второй ключ 26, третий ключ 28 и четвертый ключ 29 могут быть выполнены как показано в [6].
Блок выработки управляющих напряжений 30 может быть выполнен на базе микроконтроллера Архитектура 1986ВЕ9х, как показано в [7]. Первый сумматор 4, второй сумматор 5, третий сумматор 12 и четвертый сумматор 21, а также первый 19.3, второй 19.4 сумматоры первого управляемого согласованного фильтра и первый 20.3, второй 20.4 сумматоры второго управляемого согласованного фильтра могут быть выполнены, как показано в [8].
Согласованный фильтр 14, первый обнаружитель 15, блок вычисления ΔR разности расстояний 16, блок вычисления траекторных параметров 9; первый управляемый согласованный фильтр 19, угловой дискриминатор 8, второй управляемый согласованный фильтр 20, блок согласованных фильтров 23, блок выбора максимума 24, второй обнаружитель 27 могут быть выполнены на элементах цифровой техники, как показано в [9].
Заявляемое устройство реализует поляризационный принцип разделения прямого и переотраженного целью сигналов и использует в качестве излучаемого сигнала фазоманипулированный (ФМ) сигнал с пространственно-временным (П-В) кодированием либо в виде псевдослучайной последовательности (ПСП), либо в виде импульсного излучения сложного ФМ сигнала.
Устройство работает следующим образом: приемная позиция (фиг. 1) находится на известном расстоянии L и направлении относительно передающей позиции. Для определения координат цели (Ц) в заявляемом устройстве измеряются ее угловые координаты: α - азимут Ц относительно передающей позиции, β - азимут Ц относительно приемной позиции, эти углы измеряются относительно линии, соединяющей позиции. Выполняется также оценка FдΣ и разности расстояний ΔR=R1+R2-L, R1 - расстояние между Ц и передающей позицией, R2 - расстояние между Ц и приемной позицией. Указанные параметры оцениваются на приемной позиции по отраженным от Ц сигналам без применения метода экстраполяции, и практически за один принимаемый импульс при импульсном излучении или за один период ПСП при непрерывном излучении.
Оценка β на приемной позиции выполняется стандартным моноимпульсным алгоритмом, отличительной особенностью которого является подстройка параметров согласованных фильтров 19 и 20 в приемных каналах по оценкам α и Fд.
Оценка α базируется на применении П-В излучаемых сигналов. П-В излучаемые сигналы - это сигналы, которые нельзя представить в виде произведения временной функции (сигнала, генерируемого передатчиком) и функции пространственной переменной (диаграммы направленности передающей антенны). Формирование излучаемого П-В сигнала на примере семиэлементного кода Баркера приведено на (фиг. 3а, б).
П-В сигнал формируется путем изменения положения фазового центра передающей антенны 2 при излучении ФМ сигнала (фиг. 2). Для этого полотно передающей антенны 2 разделяется на две одинаковые части-подрешетки, каждая из которых имеет свой вход А1 и А2, как показано на фиг. 3а. Элементарные импульсы сигнала, имеющие начальную фазу временного кода (ВК) равную "0" снимаются с первого выхода передатчика 1 и излучаются подрешеткой А1, а импульсы с начальной фазой ВК равной "π" снимаются со второго входа передатчика 1 и излучаются подрешеткой А2. Выбор между подрешетками при излучении отдельных элементов ФМ сигнала осуществляется в соответствии с заданным угловым кодом Ki (где i=1…Nk), Nk - число элементарных импульсов, составляющих ФМ сигнал, элементы которого могут принимать значения "+1" и "-1". При Ki=+1 элементарный импульс ФМ сигнала излучается подрешеткой А1, при этом подрешеткой А2 излучение не производится. При Ki=-1 элементарный импульс ФМ сигнала излучает подрешетка А2, а подрешетка А1 не излучает.
В результате такого излучения функция внутриимпульсной фазовой модуляции будет зависеть от направления на цель α. На фиг. 3б приведены сигналы, излучаемые в равносигнальном направлении (РСН) и в направлении, отклоненном на угол α. Таким образом, функция внутриимпульсной фазовой модуляции сигнала, излучаемого в направлении α, будет иметь закон чередования начальных фаз не "0" и "π", а "0+Δϕ" и "π-Δϕ", где Δϕ определяется как  где Δϕ - набег фазы, отсчитываемый от середины передающей антенны 2, D - расстояние между фазовыми центрами подрешеток А1 и А2 (база), α - угловая координата цели относительно равносигнального направления (РСН), λ - длина волны.
где Δϕ - набег фазы, отсчитываемый от середины передающей антенны 2, D - расстояние между фазовыми центрами подрешеток А1 и А2 (база), α - угловая координата цели относительно равносигнального направления (РСН), λ - длина волны.
С учетом дополнительного приращения фазы после отражения от цели излучаемый сигнал можно записать в виде

где ps - мощность излучаемого сигнала, F(α) - диаграмма направленности (ДН) передающей подрешетки А1 или А2, u(t) - функция амплитудной модуляции, ai - элементы ВК (значение +1 соответствует начальной фазе равной "0", значение -1 соответствует начальной фазе равной "π"), rect(t) - импульс единичный амплитуды длительностью τ0, τ0 - длительность i-го элементарного символа кода, ƒ0 - частота несущего колебания, θ0 - начальная фаза ФМ сигнала, Ki - угловой код (принимает значения ±1), ϕ(α) - набег фазы, зависящий от направления распространения излучаемого сигнала α.
Зависимость фазовой структуры сигнала от углового положения цели дает возможность построения моноимпульсного измерителя угловых координат даже при одноканальном приеме.
В заявляемом устройстве сигналы, подаваемые на первый и второй входы передающей антенны 2, формируются в передатчике 1 (фиг. 2). Для этого синтезатор частоты 1.1 генерирует непрерывное синусоидальное колебание с частотой излучения, которое поступает на входы первого 1.3 и второго 1.4 фазовращателей. Синусоидальные сигналы, снимаемые с выходов этих фазовращателей отличаются по фазе на «π». Формирование частей ПСП, подаваемых на первый и второй входы передающей антенны 2, выполняется с помощью генератора ПСП 1.2, первого 1.5 и второго 1.6 ключевых каскадов. Генератор ПСП 1.2 формирует последовательность импульсов длительностью τ0 каждый с полярностями +1 или -1, положение которых соответствует положениям элементарных импульсов ПСП с начальной фазой «0» и «π». Длительность τ0 импульсов «+1» и «-1» определяет длительность элементарных радиоимпульсов ПСП или сложных импульсов ФМ сигналов при импульсном излучении передающей антенны 2 и задается необходимым значением разрешающей способности излучаемых сигналов по дальности δR.
При действии на втором входе первого ключевого каскада 1.5 импульса положительной полярности +1 этот каскад открывается на время τ0 и через него на вход усилителя мощности 1.7 проходят радиоимпульсы ПСП с начальной фазой «0» и длительностью τ0. Действующие в это время импульсы положительной полярности закрывают второй ключевой каскад 1.6 и синусоидальное напряжение имеющее фазу «π» на вход второго усилителя мощности 1.8 не поступает. Таким образом, когда первой половиной передающей антенны 2 излучаются импульсы ПСП или сложного ФМ импульса с начальной фазой «0», вторая половина передающей антенны 2 сигналы не излучает.
При действии на втором входе второго ключевого каскада 1.6 импульсов отрицательной полярности «-1», снимаемых с выхода генератора ПСП 1.2, этот каскад открыт, а первый ключевой каскад 1.5 закрыт. Поэтому в момент действия импульсов полярности «-1» через второй ключевой каскад 1.6 проходит синусоидальное напряжение с начальной фазой «π». Эти радиосигналы усиливаются вторым усилителем мощности 1.8 и подаются на второй вход передающей антенны 2 и излучаются ее второй половиной.
Таким образом, передающая антенна 2 совместно с передатчиком 1 формируют П-В излучаемый сигнал, у которого закон внутриимпульсной фазовой модуляции зависит от направления излучения. При отражении такого сигнала информация об угловом положении цели α кодируется в его временных параметрах (в законе фазовой модуляции), а, следовательно, может быть извлечена с помощью набора временных фильтров, согласованных с набором дискретных направлений облучаемого сектора αi.
Передающая антенна 2 излучает сигналы вертикальной поляризации. Ориентация равносигнального направления (РСН) передающей антенны 2, при котором фазовая модуляция П-В сигнала имеет закон «0», «π», направлена на приемную позицию.
Для разделения прямого сигнала и отраженного от цели используется их поляризационные различия. Сигнал, излучаемый передающей антенной 2, имеет вертикальную поляризацию и сохраняет ее при прохождении непосредственно к приемной позиции (прямой сигнал), а отраженный от цели будет иметь как вертикальную, так и горизонтальную поляризационные составляющие.
Прямой сигнал вертикальной поляризации принимается приемной антенной 3, настроенной на прием сигналов вертикальной поляризации, а вторая приемная антенна 10, настроенная на прием сигналов горизонтальной поляризации, принимает сигналы, отраженные от цели на горизонтальной поляризации.
В результате прямой сигнал вертикальной поляризации не поступает в канал оценки координат α, β, ΔR, Fд цели, так как вторая приемная антенна 10, настроенная на прием сигналов горизонтальной поляризации, эти сигналы не пропускает. Таким образом, на приемной стороне имеются: канал обработки прямого сигнала вертикальной поляризации и канал обработки отраженных от целей сигналов горизонтальной поляризации, в котором отсутствует прямой сигнал.
Сигнал, проходящий напрямую от передающей позиции к приемной вертикальной поляризации (прямой сигнал) принимается элементами приемной антенны 3 и поступают на входы первого блока фазовращателя 11, сдвиги фаз в котором имеют такие значения при которых на выходе третьего сумматора 12 формируется ДН приемной антенны, максимум которой направлен на передающую позицию. Сигналы ПСП при непрерывном излучении или импульсы ФМ импульсных сигналов при импульсном излучении вертикальной поляризации с внутриимпульсной фазовой модуляцией «0» и «π» снимаются с выхода третьего сумматора 12, усиливаются и подвергаются частотной фильтрации третьим приемником 13, после чего поступают на согласованный фильтр 14. В соответствии с обозначенным выше условием согласования РСН передающей антенны 2 с направлением на приемную позицию, параметры согласованного фильтра 14 определяются временным кодом излучаемых сигналов, который определяет порядок следования элементарных импульсов длительностью τ0 с начальными фазами «0» и «π», составляющих период ПСП при непрерывном излучении или закон фазовой модуляции излучаемого сложного ФМ сигнала.
Сигналы с выхода согласованного фильтра 14 поступают на вход первого обнаружителя 15. При превышении порога, выбираемого в соответствии с заданным значением вероятности ложной тревоги обнаружения прямого сигнала, с выхода первого обнаружителя 15 снимается сигнал решения об обнаружении - γB. Поступая на первый вход блока вычисления ΔR 16, сигнал обнаружения γB запускает счетчик, находившийся до этого в обнуленном состоянии.
Канал обработки отраженного от цели сигнала горизонтальной поляризации содержит измерители угла цели относительно передающей позиции, угла цели относительно приемной позиции и значения  а также обнаружитель этого сигнала.
а также обнаружитель этого сигнала.
Переотраженные целью сигналы имеют как вертикальную так и горизонтальную поляризационные составляющие поступают на вторую приемную антенну 10 настроенную на прием сигналов горизонтальной поляризации. Поэтому прямой сигнал вертикальной поляризации второй антенной 10 не принимается, что позволяет разделить сигнал, отраженный от цели от сигнала проходящего напрямую от передающей позиции к приемной. Принятые сигналы с выходов элементов второй антенны 10 поступают на соответствующие им по номеру входам второго 17 и третьего 18 блоков фазовращателей. Фазовые сдвиги, задаваемые фазовращателями, выбраны так, что на выходах первого 4 и второго 5 сумматоров формируются амплитудные диаграммы направленности f(β+β0) и f(β-β0) с совпадающими фазовыми центрами с разносом их максимумов по углу β на +β0 и -β0 относительно РСН, которое совпадает с направлением на передающую позицию. На выходах первого 4 и второго 5 сумматоров формируются две ДН которые используются для моноимпульсного измерения угловой координаты цели относительно приемной позиции угловым дискриминатором 8.
Для обнаружения отраженного от цели сигнала, принимаемого на горизонтальной поляризации, формируется суммарная ДН путем сложения сигналов в четвертом сумматоре 21, снимаемых с выходов первого 4 и второго 5 сумматоров. Получаемые на выходе четвертого сумматора 21 отраженные от цели сигналы усиливаются четвертым приемником 22 и поступают на второй обнаружитель 27 сигналов горизонтальной поляризации. Принимаемые от цели сигналы имеют закон изменения фаз, который зависит как от временного кода, формируемого ПСП и снимаемого с выхода генератора ПСП 1.2 передатчика 1, так и от направления α, в котором находится цель, через фазовый сдвиг ϕ(α), а также и от доплеровского набега фаз Δϕд на длительности элементарного импульса τ0 из которых состоит ПСП или сложный ФМ импульс. Таким образом, принимаемый от цели сигнал на выходе суммарной ДН является функцией таких информационных параметров как α, β и Fд. Эти параметры наряду со значениями L и оценкой ΔR используются для определения местоположения цели в блоке вычисления траекторных параметров 9. Значения всех этих параметров заранее неизвестны и представляют случайные величины, подлежащие оценке.
При неизвестных информационных параметрах принимаемых сигналов обнаружитель строится по многоканальной схеме. Каждый из каналов настроен на прием сигналов с какими-то конкретными значениями неизвестных параметров и содержит либо коррелятор с опорным сигналом, содержащим эти конкретные параметры, либо согласованный фильтр с импульсной характеристикой соответствующей выбранным значениям этих параметров и амплитудный детектор.
Принимаемые от цели второй приемной антенной 10 сигналы горизонтальной поляризации имеют неизвестные значения фазовой внутриимпульсной модуляции «0+Δϕ(α)+iΔϕд» и «π-Δϕ(α)+iΔϕд» (i=1÷(NK-1), NK - число элементарных импульсов, составляющих ПСП или ФМ сигнал), зависящей как от азимута цели α относительно РСН передающей антенны 2, так и от значения доплеровской добавки фазы iΔϕд зависящей от Fд. Поэтому блок согласованных фильтров 23 строится по схеме набора фильтров согласованных с набором М точек настройки по углам зондирования, перекрывающих весь облучаемый сектор Δα от αmin до αmax с шагом δα. В каждой точке угловой настройки αi формируется набор согласованных фильтров со значениями настройки Fдj(j=1÷N) перекрывающих диапазон ожидаемых сдвигов частот с шагом δFд от Fдmin до Fдmax.
Таким образом блок согласованных фильтров (СФ)23, состоит из К фильтров K=N⋅M, где  - число точек настройки по углу α, a для каждого направления
- число точек настройки по углу α, a для каждого направления  - точек настройки по доплеровской частоте.
- точек настройки по доплеровской частоте.
Аналоговая реализация блока СФ 23 представлена на фиг. 4, а реализация его j-го канала настройки на Fдj и М точек настройки по углу α для семиэлементного кода Баркера на фиг. 5.
Продетектированные сигналы, снимаемые с выходов К фильтров, поступают на К входов блока выбора максимума 24, который определяет номер фильтра на выходе которого сигнал достигает максимальной амплитуды.
Сигнал достигает максимума амплитуды на выходе того фильтра, у которого значение настройки по углу αi и по доплеровской частоте Fдj наиболее близки к истинным значениям этих параметров в принимаемом от цели сигнале. Значения настройки этого фильтра αi и Fдi принимаются за оценки  и
и  истинных параметров α и Fд. Точность оценки будет определяться отношением сигнал-шум и шагом дискретизации δα по углу α и δFд по значениям доплеровской частоты Fд.
истинных параметров α и Fд. Точность оценки будет определяться отношением сигнал-шум и шагом дискретизации δα по углу α и δFд по значениям доплеровской частоты Fд.
Сигнал максимальной амплитуды с третьего выхода блока выбора максимума 24 подается на второй обнаружитель 27. При превышении порога во втором обнаружителе 27 сигнал обнаружения γг открывает первый 25, второй 26, третий 28 и четвертый 29 ключи. Через открытые первый 25 и второй 26 ключи оценки  и
и  соответствующие значениям настройки фильтра с максимальным входным сигналом, поступают на первый и второй входы блока выработки управляющих напряжений 30 соответственно и на четвертый и пятый входы блока вычисления траекторных параметров 9.
соответствующие значениям настройки фильтра с максимальным входным сигналом, поступают на первый и второй входы блока выработки управляющих напряжений 30 соответственно и на четвертый и пятый входы блока вычисления траекторных параметров 9.
Оценка угла β выполняется двухканальным амплитудным моноимпульсным измерителем. Для этого сигналы, снимаемые с выходов первого 4 и второго 5 сумматоров, усиливаются первым 6 и вторым 7 приемниками и поступают на первые входы управляемых согласованных фильтров 19 и 20 соответственно. Для максимизации отношения сигнал-шум эти фильтры подстраиваются под фазовую структуру принимаемых сигналов оценками параметров  и
и  Для этого в блоке выработки управляющих напряжений 30 по оценкам
Для этого в блоке выработки управляющих напряжений 30 по оценкам  и
и  вырабатываются управляющие настройкой фазовращателей в первом 19 и втором 20 управляемых согласованных фильтрах напряжения, которые подаются на вторые и третьи входы первого 19 и второго 20 управляемых согласованных фильтров. Вариант аналоговой реализации управляемых СФ 19 и 20 приведены на фиг. 6а, б для ФМ сигналов без уточнения закона изменения фаз в принимаемом сигнале, а на фиг. 7 приведена реализация одного из управляемых СФ для ФМ сигнала - семиэлементного кода Баркера, приходящего с направления α со сдвигом по частоте Fд. Амплитуды сигналов на входах первого 19 и второго 20 управляемых согласованных фильтров, определяются, среди ряда прочих факторов, значениями коэффициентов направленности ДН приемных каналов, значения которых зависят от угла цели β. Сигналы с выходов первого 19 и второго 20 управляемых согласованных фильтров поступают на первый и второй входы углового дискриминатора 8 соответственно. Снимаемая с выхода углового дискриминатор 8 оценка
вырабатываются управляющие настройкой фазовращателей в первом 19 и втором 20 управляемых согласованных фильтрах напряжения, которые подаются на вторые и третьи входы первого 19 и второго 20 управляемых согласованных фильтров. Вариант аналоговой реализации управляемых СФ 19 и 20 приведены на фиг. 6а, б для ФМ сигналов без уточнения закона изменения фаз в принимаемом сигнале, а на фиг. 7 приведена реализация одного из управляемых СФ для ФМ сигнала - семиэлементного кода Баркера, приходящего с направления α со сдвигом по частоте Fд. Амплитуды сигналов на входах первого 19 и второго 20 управляемых согласованных фильтров, определяются, среди ряда прочих факторов, значениями коэффициентов направленности ДН приемных каналов, значения которых зависят от угла цели β. Сигналы с выходов первого 19 и второго 20 управляемых согласованных фильтров поступают на первый и второй входы углового дискриминатора 8 соответственно. Снимаемая с выхода углового дискриминатор 8 оценка  через открытый при срабатывании второго обнаружителя 27 третий ключ 28 подается на первый вход блока вычисления траекторных параметров 9.
через открытый при срабатывании второго обнаружителя 27 третий ключ 28 подается на первый вход блока вычисления траекторных параметров 9.
В блоке вычисления траекторных параметров 9 производится расчет дальности относительно приемной позиции триангуляционным способом. Из треугольника RЦ/T (фиг. 8) по теореме синусов выразим:

Тогда  Прямоугольные координаты определим относительно позиций R и Т как
Прямоугольные координаты определим относительно позиций R и Т как


Учитывая, что другим измеряемым параметром при геометрии задачи представленной на фиг. 8 является суммарная дальность:

Тогда с учетом (2) получим значение высоты полета цели в виде:

На фиг. 9 приведены значения СКО определения высоты полета цели при величине базы L=50 км, цель совершает прямолинейный полет на высоте 5000 м перпендикулярно к линии базы со скоростью 200 м/с с начальными координатами Х=20 км, Y=15 км. СКО определения высоты цели получены при: СКО определения угловых координат σр=0.1 град., СКО определения суммарной дальности σRΣ=10 м.
На фиг. 10 приведены значения СКО определения высоты полета цели при тех же условиях, но цель летит под углом к линии базы 60 град.
На фиг. 11 приведены СКО определения координат при полете цели параллельно оси X (линии базы) при Хо=45000 м, Yo=5000 м. При таких условиях устройством прототипом определение высоты невозможно, ввиду невозможности экстраполяции суммарной доплеровской частоты до линии базы.
На фиг. 12 приведены СКО определения координат при полете цели параллельно оси X (линии базы) при Хо=45000 м, Yo=500 м. При таких условиях устройством прототипом определение высоты невозможно, ввиду невозможности экстраполяции суммарной доплеровской частоты до линии базы.
На второй вход блока вычисления траекторных параметров 9 с выхода блока вычисления ΔR 16 поступает оценка разности расстояний прямого и переотраженного от цели сигналов ΔR, значение которой вычисляется по разности времен обнаружения сигнала, проходящего по прямой траектории от передающей позиции к приемной и равного известной величине L, и сигнала отраженного от цели и проходящего расстояние R1+R2>L, где R1 и R2 - расстояния от передающей позиции до цели и от цели до приемной позиции соответственно.
В случае R1+R2=L означает, что цель летит строго по линии, соединяющей передающую и приемную позиции. При этом азимутальные углы и углы места относительно передающей и приемной позиций одинаковые и равны нулю. Среди множества возможных траекторий полета целей вероятность появление какой-либо конкретной траектории равна нулю. Данное предположение в наибольшей степени относится к появлению траектории полета цели строго по прямой линии, соединяющей позиции. Любые другие траектории полета цели, например, параллельно линии, соединяющей позиции, будут иметь отличные от нуля либо азимутальную, либо угломестную координату цели, либо и ту, и другую.
Поэтому значение ΔR практически всегда ΔR≠0. Точность оценки ΔR определяется точностью фиксации моментов обнаружения прямого и отраженного сигналов и разрешающей способностью по дальности используемых передающей позицией непрерывной ПСП или одиночных ФМ сигналов. Также точность зависит от отношения сигнал-шум, что особенно характерно для сигнала, отраженного от цели. В канале приема прямого сигнала отношение сигнал-шум будет значительно больше, в связи с меньшей дальностью распространения, отсутствием шумов флюктуации ЭПР Ц. При приближении траектории движения Ц к линии, соединяющей передающую и приемную позиции, значение ΔR будет уменьшаться, а отношение сигнал/шум в канале приема горизонтальной поляризационной составляющей увеличивается за счет возрастания просветной ЭПР и максимальных значений КНД ДН передающей 2 и второй приемной 10 антенн. Возрастание просветной ЭПР при приближении угловых координат Ц к РСН передающей 2 и второй приемной 10 антенн, вызывает не только увеличение отношение сигнал/шум, но и минимизацию дисперсия оценки угловых координат, что позволяет получить высокую точность оценки местоположения Ц при практически любых траекториях полета в пределах углового сектора, облучаемого передающей антенной 2.
В результате перечисленных выше факторов точность оценки положения цели будет высокой при практически любых траекториях полета в пределах углового сектора передающей антенны.
Применяемые в заявляемом устройстве блоки предназначенные для измерения угловых координат Ц α и β, разности расстояний ΔR и значения Fд решают задачу оценки местоположения Ц за один принимаемый переотраженный Ц импульсный ФМ сигнал или за один период непрерывных ПСП без экстраполяции ее траектории. Данное обстоятельство исключает задержку в получении оценки местоположения Ц, так как не требует проводить экстраполяцию траектории цели, как это требовалось в устройстве-прототипе.
Использование сложного излучаемого ФМ сигнала с двумя видами кодирования - временным и угловым - затрудняет разведку кодов, а значит обнаружения таких сигналов и постановку уводящих помех, что приводит к дополнительному техническому результату, т.к. заявляемое устройство имеет большую скрытность работы и большую помехоустойчивость свойственную сложным ФМ сигналам, а, следовательно, и большую помехозащищенность чем устройство-прототип.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Шахгильдян В.В. и др. Радиопередающие устройства, М.: Радио и связь, 203.- 560 с. Стр. 512 рис. 19 б.
2. Панасюк, Ю.Н. Устройства сверхвысоких частот./ Ю.Н. Панасюк, А.П. Пудовкин. - Тамбов: Изд-во ФГБОУ ВПО «ТГТУ», 2015. - 80 с. Стр. 49. Рис. 2.44.
3. Справочник по основам радиолокационной техники. Под ред. Дружинина В.В. М.: Военное издательство, 1967. 776 с. стр. 165. рис. 4.48.
4. Бакулев П.А., Радиолокационные системы. - М.: Радиотехника, 2004, 320 с рис. 11.12 стр. 261.
5. Проектирование радиоприемных устройств под. ред. Сиверса А.П. М.: «Сов. радио», 1976 г. стр. 68 рис. 2.25, 485 с.
6. Гусев В.Г., Гусев Ю.М. Электроника и микропроцессорная техника: Учеб. для вузов. - М.: Высш. шк., 2008. - 798 с.: стр. 512. Рис. 10.9).
7. Огородников, И.Н. Микропроцессорная техника: введение в Cortex-М3: учеб. пособие / И.Н. Огородников. - Екатеринбург: Изд-во Урал. ун-та, 2015. - 116 с. Стр. 35 рисунок 2.2.
8. Веселов Г.И., Егоров Е.Н., Алехин Ю.Н. и др. Микроэлектронные устройства СВЧ. Под ред. Веселова Г.И., М.: Высшая школа, 1988. - 280 с. рис. 3.27 стр. 74.
9. Огородников, И.Н. Микропроцессорная техника: введение в Cortex-М3: учеб. пособие / И.Н. Огородников. - Екатеринбург: Изд-во Урал. ун-та, 2015. - 116 с. Стр. 35 рисунок 2.2.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИНИЯ РАДИОСВЯЗИ С ПРОСТРАНСТВЕННОЙ МОДУЛЯЦИЕЙ | 1999 |
|
RU2152132C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА | 2013 |
|
RU2534220C1 |
| СИСТЕМА РАДИОСВЯЗИ С ШУМОПОДОБНЫМИ СИГНАЛАМИ | 2009 |
|
RU2396707C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ЦЕЛИ | 1997 |
|
RU2114444C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 1997 |
|
RU2117960C1 |
| ЛИНИЯ РАДИОСВЯЗИ | 1999 |
|
RU2163053C2 |
| ЛИНИЯ РАДИОСВЯЗИ С ПОВЫШЕННОЙ СКРЫТНОСТЬЮ ПЕРЕДАВАЕМОЙ ИНФОРМАЦИИ | 2002 |
|
RU2227370C2 |
| МНОГОКАНАЛЬНАЯ СИСТЕМА РАДИОСВЯЗИ С ПОВТОРНЫМ ИСПОЛЬЗОВАНИЕМ ЧАСТОТЫ | 1996 |
|
RU2115243C1 |
| ЛИНИЯ РАДИОСВЯЗИ | 2001 |
|
RU2193278C1 |
| Устройство передачи и приема шумоподобными сигналами | 1983 |
|
SU1146811A1 |
Изобретение относится к области радиолокации, в частности к устройствам определения параметров движения цели в бистатических радиолокационных системах. Достигаемый технический результат - повышение точности измерения местоположения цели во всей области возможного приема сигнала, сокращение времени измерения координат, а также повышение помехозащищенности работы просветной бистатической РЛС. Указанный результат достигается за счет того, что устройство содержит передающую позицию, состоящую из передатчика, передающей антенны, и находящуюся в удалении от источника излучения приемную позицию состоящую из приемной антенны, первого и второго сумматоров, выходы которых соединены соответственно с входами первого и второго приемников, угловой дискриминатор, блок вычисления траекторных параметров, содержит также вторую приемную антенну, последовательно соединенные первый блок фазовращателей, третий сумматор, третий приемник, согласованный фильтр, первый обнаружитель и блок вычисления ΔR, второй и третий блоки фазовращателей, первый и второй управляемые согласованные фильтры, последовательно соединенные четвертый сумматор, четвертый приемник, блок согласованных фильтров и блок выбора максимума, первый и второй ключи, второй обнаружитель, третий, четвертый ключи и блок выработки управляющих напряжений. 3 з.п. ф-лы, 12 ил.
1. Устройство для определения параметров движения цели, содержащее передающую позицию, состоящую из передатчика, выход которого соединен с входом передающей антенны, и находящуюся в удалении от источника излучения, приемную позицию, состоящую из приемной антенны, первого и второго сумматоров, выходы которых соединены соответственно с входами первого и второго приемников, а также угловой дискриминатор и блок вычисления траекторных параметров, отличающееся тем, что в устройство дополнительно введены: вторая приемная антенна, последовательно соединенные первый блок фазовращателей, третий сумматор, третий приемник, согласованный фильтр, первый обнаружитель и блок вычисления ΔR, выход которого соединен со вторым входом блока вычисления траекторных параметров, третий вход которого является входом подачи значения дальности L, где ΔR=R1+R2-L, R1 - расстояние между целью и передающей позицией, R2 - расстояние между целью и приемной позицией, L - известное расстояние между приемной позиции и передающей позицией, входы первого блока фазовращателей подключены к выходам приемной антенны, второй и третий блоки фазовращателей, входы которых соединены с выходами второй приемной антенны, а выходы - с входами первого и второго сумматоров, первый и второй управляемые согласованные фильтры, первые входы которых соединены соответственно с выходами первого и второго приемников, а выходы - с входами углового дискриминатора, последовательно соединенные четвертый сумматор, четвертый приемник, блок согласованных фильтров и блок выбора максимума, первый и второй выходы которого соединены с первыми входами первого и второго ключей, третий выход соединен с входом второго обнаружителя, выход которого соединен со вторыми входами первого, второго, третьего, четвертого ключей и вторым входом блока вычисления ΔR, причем первый и второй входы четвертого сумматора подключены к выходам первого и второго сумматоров соответственно, блок выработки управляющих напряжений, первый выход которого соединен со вторыми входами первого и второго управляемых согласованных фильтров, второй выход соединен с третьими входами первого и второго управляемых согласованных фильтров, выходы первого и второго ключей соединены с первым и вторым входами блока выработки управляющих напряжений соответственно и четвертым и пятым входами блока вычисления траекторных параметров, выход углового дискриминатора соединен с первым входом третьего ключа, выход которого соединен с первым входом блока вычисления траекторных параметров, выход которого соединен с первым входом четвертого ключа, выход которого является выходом всего устройства, второй выход передатчика соединен со вторым входом передающей антенны.
2. Устройство для определения параметров движения цели по п. 1, отличающееся тем, что передатчик, содержит синтезатор частоты, первый усилитель мощности, выход которого является первым выходом передатчика и соединен с первым входом передающей антенны, первый и второй фазовращатели, входы которых подключены к выходу синтезатора частоты, а выходы, соответственно, к первым входам первого и второго ключевых каскадов, вторые входы которых соединены с выходом генератора псевдослучайной последовательности, выход первого ключевого каскада подключен к входу первого усилителя мощности, а выход второго ключевого каскада через второй усилитель мощности, выход которого является вторым выходом передатчика, подключен к второму входу передающей антенны.
3. Устройство для определения параметров движения цели по п. 1, отличающееся тем, что первый управляемый согласованный фильтр содержит линию задержки с отводами, вход которой является первым входом первого управляемого согласованного фильтра, а ее выходы подключены к соответствующим им по номеру входам блока управляемых фазовращателей частотной настройки, вход управления которого является третьим входом первого управляемого согласованного фильтра, часть выходов блока управляемых фазовращателей частотной настройки подключены к соответствующим им по номеру входам первого сумматора первого управляемого согласованного фильтра, выход которого через первый управляемый фазовращатель азимутальной настройки первого управляемого согласованного фильтра подключен к первому входу третьего сумматора первого управляемого согласованного фильтра, другая часть выходов блока управляемых фазовращателей частотной настройки соединена с соответствующими им по номеру входами второго сумматора первого управляемого согласованного фильтра, выход которого соединен со вторым входом третьего сумматора первого управляемого согласованного фильтра через последовательное соединенные фазовращатель на «π», и второй управляемый фазовращатель азимутальной настройки первого управляемого согласованного фильтра, выход которого является выходом первого управляемого согласованного фильтра, входы управления первого и второго управляемых фазовращателей азимутальной настройки первого управляемого согласованного фильтра соединены с его вторым входом.
4. Устройство для определения параметров движения цели по п. 1, отличающееся тем, что блок согласованных фильтров содержит линию задержки с отводами, вход которой является входом блока согласованных фильтров, а выходы подключены к совпадающим им по номеру входам N блоков фазовращателей частотной настройки, часть выходов которых подключены к соответствующим им по номеру входам N первых сумматоров, выходы которых подключены к соответствующим им по номеру N первым блокам фазовращателей настройки на М направления, другая часть выходов каждого из N блоков фазовращателей частотной настройки подключена к соответствующим им по номеру входам вторых сумматоров, выход каждого из которых через соответствующий фазовращатель на «π» соединены с соответствующими им по номеру входами вторых блоков фазовращателей настройки на М направлений, М выходов каждого из первых блоков фазовращателей настройки на М направлений подключены к соответствующим им по номеру первым входам М двухвходовых сумматоров, вторые входы каждого из которых соединены с соответствующими им по номеру выходами вторых блоков фазовращателей настройки на М направлений, выходы каждого из которых подключены к входам М амплитудных детекторов, выходы которых являются выходами всего блока согласованных фильтров.
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕЛИ | 2015 |
|
RU2584332C1 |
| Подвесная опора рамочной подвижной системы магнитоэлектрического измерительного прибора | 1956 |
|
SU107370A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 2010 |
|
RU2444757C1 |
| СПОСОБ КОНТРОЛЯ ВОЗДУШНОГО ПРОСТРАНСТВА, ОБЛУЧАЕМОГО ВНЕШНИМИ ИСТОЧНИКАМИ ИЗЛУЧЕНИЯ, И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2285939C1 |
| WO 2002014291 A2, 21.02.2002 | |||
| US 20170254896 A1, 07.09.2017 | |||
| US 8314733 B1, 20.11.2012. | |||

