Изобретение относится к области радиолокации, в частности к методам восстановления траектории цели в разнесенной радиолокации.
Известны различные устройства для определения параметров движения объекта в разнесенной радиолокации.
Физическая основа работы этих устройств основана на способе, описанном в [1. см. Ширман Я.Д., Голиков В.Н., Бусыгин И.Н. и др. Под ред. Я.Д. Ширмана. Теоретические основы радиолокации, стр.321 - М.: Сов. Радио, 1970, 560 с.].
Принцип действия разнесенной радиолокационной системы основан на излучении передатчиком сигнала, приеме его приемником по двум путям: прямым и после отражения целью. При этом измеряется полное (суммарное) расстояние, равное длине пути передающая позиция - цель - приемная позиция, а также углы прихода отраженного сигнала, при известной базе (кратчайшему расстоянию между передающей и приемной позициями). Суммарное расстояние определяет положение цели на поверхности эллипсоида вращения, фокусы которого находятся в точках расположения передатчика и приемника. Пересечение прямой, характеризующей направление прихода отраженного сигнала, с поверхностью эллипсоида вращения определяет положение цели в пространстве.
В (2. см. Аверьянов В.Я. Разнесенные радиолокационные станции и системы. М.: Наука и техника, 1978, стр.28,рис.11.) рассмотрено построение приемокоординатного устройства.
Устройство состоит из антенны приемника запуска, выход которой соединен со входом приемника запуска, антенны приемника эхосигнала, выход которой соединен с приемником эхосигнала, выход которого соединен с первым входом счетно-решающего устройства, вторым входом которого является выход приемника запуска, выход счетно-решающего устройства соединен со входом индикатора.
Отраженный от наблюдаемого объекта сигнал принимается приемником сигнала и вводится в счетно-решающее устройство вместе с информацией о направлении прихода эхосигнала. По разности времени прихода сигнала, отраженного от цели, и сигнала, распространяющегося от передатчика к приемнику, величине базы и углу между направлениями на облучатель и наблюдаемый объект счетно-решающее устройство определяет дальность до цели.
В данном устройстве сложно реализовать процедуры когерентного накопления, а следовательно, неполно используются возможности системы в части получения потенциальной точности измерения координат цели.
Кроме того, при нахождении цели вблизи линии базы разность моментов времени между сигналом, переотраженным целью, и сигналом, распространяющимся от передатчика к приемнику, мала, что затрудняет их разрешение. Это вызывает необходимость использования радиоимпульсов малой длительности, что усложняет конструктивное исполнение устройств генерации и приема сигналов.
Известно (3. см. патент на изобретение РФ №2124220, М. кл. G01S 13/06, опубл. 27.12.1998 г.) устройство для определения параметров движения цели, содержащее передающую позицию и находящуюся в удаленной от нее точке приемную позицию, состоящую из антенны, последовательно соединенной с приемным устройством, детектором и фильтром низких частот, выход которого соединен с входами блока измерения направления прихода интерференционного сигнала и входами блока измерения доплеровской частоты, выход блока измерения направления прихода интерференционного сигнала соединен в первыми входами блока экстраполяции измеряемых параметров и блока вычисления траекторных параметров, причем один из входов блока экстраполяции измеряемых параметров соединен с выходом блока измерения направления прихода интерференционного сигнала, а другой вход - с выходом блока измерения доплеровской частоты, выход блока экстраполяции измеряемых параметров соединен со входом блока вычисления момента времени пересечения целью линии базы и одним из входов блока определения поверхности положения, другой вход которого соединен с выходом блока вычисления момента времени пересечения целью линии базы, выход блока вычисления траекторных параметров является выходом системы.
В данном устройстве блок измерения доплеровской частоты обладает малой точностью, обусловленной широкой полосой пропускания фильтра нижних частот (определяется диапазоном доплеровских частот), кроме того, в устройстве невозможно реализовать процедуру когерентного накопления, что приводит к неполному использованию возможностей системы в части получения потенциальной точности измерения координат цели.
Известно также (4. см. патент на изобретение РФ №2133480, М. кл. G01S 3/72, G01S 7/42, опубл. 20.07.1999 г.) устройство, содержащее передающую позицию и находящуюся в удаленной от нее точке приемную позицию, состоящую из антенны, последовательно соединенной с приемным устройством, детектором и фильтром низких частот, выход которого соединен с входами блока измерения направления прихода интерференционного сигнала и входами блока измерения допплеровской частоты, выход блока измерения доплеровской частоты соединен со входом блока определения поверхности положения, выход которого соединен с первым входом блока вычисления траекторных параметров, второй вход которого соединен с выходом блока измерения направления прихода интерференционного сигнала, выход блока вычисления траекторных параметров является выходом системы.
В данном устройстве ограниченная точность блока измерения направления прихода интерференционного сигнала, обусловленная широкой полосой спектра помехи, проходящей через фильтр нижних частот, приводит к снижению точности определения угловых координат цели, кроме того, в нем отсутствует процедура когерентного накопления.
Кроме того, в (5. см. патент на изобретение РФ №2168740, М. кл. G01S 13/06, опубл. 10.06.2001 г.)) рассмотрено устройство для определения параметров движения цели, содержащее передающую позицию и находящуюся в удаленной от нее точке приемную позицию, состоящую из антенны, соединенной с приемным устройством, имеющим N парциальных каналов, выходы которых соединены с соответствующими входами блока измерения доплеровской частоты и блока измерения направления прихода интерференционного сигнала, каждый из N парциальных каналов состоит из приемника, и содержащее также блок экстраполяции измеряемых параметров, блок вычисления момента времени пересечения целью линии базы и блок определения поверхности положения, выход которого соединен с одним из входов блока вычисления траекторных параметров, другой вход блока вычисления траекторных параметров соединен с выходом блока измерения направления прихода интерференционного сигнала, а выход является выходом всего устройства, один из входов блока экстраполяции измеряемых параметров соединен с выходом блока измерения направления прихода интерференционного сигнала, а выход - с входом блока вычисления момента времени пересечения целью линии базы и одним из входов блока определения поверхности положения, другой вход которого соединен с выходом блока вычисления момента времени пересечения целью линии базы, блока деления опорного напряжения, вход которого является одним из входов приемного устройства, а один из выходов соединен непосредственно с входом соответствующего приемника, в остальные N-1 парциальных каналов введены суммирующие устройства, один из входов которых является входов приемного устройства, а другой соединен с соответствующим выходом блока деления опорного напряжения, выход каждого суммирующего устройства соединен с соответствующим приемником, кроме того, в устройство введен блок идентификации сигналов но частоте и вычитания ложных сигналов, вход которого соединен с выходом блока измерения доплеровской частоты, а выход - с одним из входов блока экстраполяции измеряемых параметров.
В данном устройстве из-за невозможности реализации когерентного накопления каждый парциальный канал обладает ограниченной точностью.
Известно также (6. см. патент на полезную модель РФ №107370, М. кл. G01S 13/06, опубл. 10.08.2011 г.) устройство для определения параметров движения цели, содержащее передающую позицию, состоящую из передатчика и передающей антенны и находящуюся в удаленной от нее точке, приемную позицию, состоящую из приемной антенны, двух цепей, включающих в себя последовательно соединенные приемник, детектор и фильтр нижних частот, при этом выходы фильтров нижних частот первой и второй цепей соединены соответственно с первым и вторым входами блока измерения направления прихода интерференционного сигнала, выход которого соединен с первым входом блока вычисления траекторных параметров, выход которого является выходом устройства, а также первого блока измерения доплеровской частоты, вход которого соединен с выходом фильтра нижних частот первой цепи, а первый выход приемной антенны соединен с входом приемника первой цепи, передающая позиция содержит последовательно соединенные второй передатчик и блок суммирования, второй вход которого соединен с выходом первого передатчика, а выход соединен с входом передающей антенны, приемная позиция дополнительно содержит блок разделения, вход которого соединен со вторым выходом приемной антенны, а его первый выход соединен с входом приемника второй цепи, третью цепь, состоящую из последовательно соединенных приемника, детектора и фильтра нижних частот, причем вход приемника третьей цепи соединен со вторым выходом блока разделения, последовательно соединенные измеритель разности фаз, первый и второй входы которого соединены соответственно с выходами фильтров нижних частот второй и третьей цепей, и блок оценки суммарной дальности, выход которого соединен со вторым входом блока вычисления траекторных параметров, последовательно соединенные второй блок измерения доплеровской частоты, вход которого соединен с выходом фильтра нижних частот третьей цепи, и блок оценки скорости изменения направления прихода интерференционного сигнала, второй вход которого соединен с выходом блока измерения направления прихода интерференционного сигнала, третий вход соединен с выходом первого блока измерения доплеровской частоты, а выход подключен к третьему входу блока вычисления траекторных параметров, к четвертому входу которого подключен выход блока масштабирования, вход которого соединен с выходом первого блока измерения доплеровской частоты.
Данное устройство имеет ограничения по получению высокой точности измерения как доплеровской частоты, так и углового положения цели вследствие невозможности сужения полосы пропускания фильтра нижних частот (определяется диапазоном доплеровских частот) и невозможности реализации процедуры когерентного накопления.
Известно также устройство (7. см. патент на полезную модель РФ №109869, М. кл. G01S 3/46, опубл. 27.10.2011 г.) для определения параметров движения цели, содержащее передающую позицию, состоящую из последовательно соединенных передатчика и антенны, и в удаленной от нее точке приемную позицию, которая состоит из антенны приемной позиции, имеющей N выходов, каждый из которых, кроме центрального, соединен с одним из входов соответствующего суммирующего устройства, выход которого соединен с соответствующим приемником, а центральный выход антенны соединен с блоком деления опорного напряжения, один из выходов которого соединен непосредственно с входом приемника центрального парциального канала, а остальные N-1 выходов соединены со вторыми входами суммирующих устройств соответствующих парциальных каналов, блока определения азимутального положения диаграммы направленности антенны передающей позиции, вход которого подключен ко второму выходу приемника центрального парциального канала, а выход подключен ко второму входу блока вычисления траекторных параметров, при этом передатчик передающей позиции содержит последовательно соединенные блок синхронизации, синтезатор частоты, усилитель мощности и блок управления лучом, второй вход которого соединен со вторым выходом блока синхронизации, а выход соединен с входом передающей антенны, при этом выходы приемника каждого из парциальных каналов раздельно соединены с соответствующими входами блока измерения направления прихода интерференционного сигнала, выход которого соединен с первым входом блока вычисления траекторных параметров, выход которого является выходом всего устройства.
Данное устройство также не позволяет полностью использовать возможности системы в части получения потенциальной точности измерения координат цели вследствие отсутствия процедуры когерентного накопления.
Известно устройство (8. см. патент на изобретение РФ №2154840, М. кл. G01S 13/06, опубл. 20.08.2000 г.) для определения параметров движения объекта, содержащее передающую позицию и в удаленной от нее точке приемную позицию, состоящую из антенны, соединенной с приемным устройством, выход которого соединен со входами блока измерения доплеровской частоты и входами блока измерения направления прихода интерференционного сигнала, блока экстраполяции измеряемых параметров, один вход которого соединен с выходом блока измерения доплеровской частоты, второй вход - с выходом блока измерения направления прихода интерференционного сигнала, а выход соединен со входом блока вычисления момента времени пересечения целью линии базы, блока определения поверхности положения, соединенного одним своим входом с выходом блока вычисления момента времени пересечения целью линии базы, вторым - с выходом блока экстраполяции измеряемых параметров, а выходом - с одним из входов блока вычисления траекторных параметров, другой вход которого соединен с выходом блока измерения направления прихода интерференционного сигнала, блока определения статистических характеристик ошибок измерения доплеровской частоты и направления прихода интерференционного сигнала и блок конечного вычисления траекторных параметров, причем один вход блока определения статистических характеристик ошибок измерения доплеровской частоты и направления прихода интерференционного сигнала соединен с выходом блока измерения направления прихода интерференционного сигнала, второй вход - с выходом блока измерения доплеровской частоты, а выход соединен с одним из четырех входов блока конечного вычисления траекторных параметров, другие три входа которого раздельно соединены с выходами блока измерения направления прихода интерференционного сигнала, блока измерения доплеровской частоты и блока вычисления траекторных параметров, при этом выходом всего устройства является выход блока конечного вычисления траекторных параметров.
Данное устройство выбрано в качестве прототипа.
В прототипе не полно используются возможности системы в части получения потенциальной точности измерения координат цели, что обусловлено отсутствием возможности организации процедуры когерентного накопления отраженного целью сигнала в течение всего времени наблюдения.
Достигаемым техническим результатом изобретения является повышение точности оценки координат цели за счет реализации процедуры когерентного накопления.
Для достижения вышеуказанного результата устройство для определения параметров движения объекта, содержащее передающую позицию и в удаленной от нее точке приемную позицию, состоящую из антенны, соединенной со входом двухканального приемного устройства, выходы которого подключены к соответствующим входам измерителя направления прихода интерференционного сигнала, последовательно соединенных измерителя доплеровской частоты, блока экстраполяции измеряемых параметров, блока вычисления момента времени пересечения целью линии базы, блока определения поверхности положения и блока вычисления траекторных параметров, а также блока определения статистических характеристик ошибок измерения доплеровской частоты и направления прихода интерференционного сигнала, выходом связанного со входом блока конечного вычисления траекторных параметров, выход которого является выходом приемной позиции, при этом выход измерителя направления прихода интерференционного сигнала соединен со вторыми входами блока экстраполяции измеряемых параметров, блока вычисления траекторных параметров, блока конечного вычисления траекторных параметров, выход блока экстраполяции измеряемых параметров соединен со вторым входом блока определения поверхности положения, второй выход блока вычисления траекторных параметров соединен с третьим входом блока конечного вычисления траекторных параметров, выход которого является выходом всего устройства, отличается тем, что передающая позиция содержит передающие антенны горизонтальной и вертикальной поляризации, входом соединенные с выходом передающего устройства, в приемной позиции антенна состоит из приемных антенн горизонтальной и вертикальной поляризации, приемное устройство содержит помимо первого и второго приемных трактов основных каналов приемный тракт дополнительного канала, блок формирования фазированных опорных напряжений (БФФОН), первый и второй фазовые детекторы, измеритель разности фаз, первый и второй интеграторы, выходы которых являются выходами приемного устройства приемной позиции, и фазовращатель, при этом выход приемной антенны горизонтальной поляризации связан со входом приемного тракта дополнительного капала, выход приемной антенны вертикальной поляризации соединен со входами первого и второго приемных трактов основных каналов, выходы которых подключены ко входам первого и второго фазовых детекторов соответственно, и к первому и второму входам БФФОН соответственно, первый выход которого подключен ко второму входу первого фазового детектора, выход второго приемного тракта основного канала соединен также с первым входом измерителя разности фаз, ко второму входу которого подключен выход фазовращателя, вход которого соединен со вторым входом второго фазового детектора и вторым выходом БФФОН, третий вход которого соединен с выходом приемного тракта дополнительного канала, выходы первого и второго фазовых детекторов подключены соответственно ко входам первого и второго интеграторов, выходы которых являются выходами приемного устройства приемной позиции, выход измерителя направления прихода интерференционного сигнала дополнительно соединен с третьим входом блока определения поверхности положения, а второй выход измерителя доплеровской частоты подключен к четвертому входу блока конечного вычисления траекторных параметров.
При этом блок формирования фазированных опорных напряжений (БФФОН) состоит из параллельно соединенных первого и второго фазоизмерителей, первые входы которых являются входами для подключения выходов первого и второго приемных трактов основных каналов соответственно, первого и второго ключей, первого и второго запоминающих устройств, первого и второго управляемых фазовращателей, мультивибратора, выход которого соединен со вторыми входами первого и второго ключей и первого и второго запоминающих устройств, вторые входы первого и второго фазоизмерителей и первого и второго управляемых фазовращателей являются входами для подключения выхода приемного тракта дополнительного канала, а выходы первого и второго управляемых фазовращателей являются первым и вторым выходами БФФОН соответственно.
Достижение технического результата обеспечивается указанными отличиями путем периодического изменения фазы опорного сигнала таким образом, чтобы обеспечивалась синфазность (когерентность) опорного сигнала и сигнала от цели в течение всего времени наблюдения за целью. Вследствие этого амплитудное детектирование сигнала (осуществляемое в прототипе) оказалось возможным заменить на синхронное детектирование, осуществляемое в фазовых детекторах 6.1 и 6.2, обеспечивающих работу измерителя направления прихода сигнала 9, и в измерителе разности фаз 6.3, обеспечивающего работу измерителя доплеровской частоты 10. Синхронный детектор обладает высокой частотной избирательностью.
Выделение сигнала из шума происходит за счет высокой частотной избирательности синхронного детектора и последующего интегрирования сигнала в интеграторах 7.1 и 7.2. [9. Степанов А.В. Синхронный детектор. Описание задачи. МГУ им. М.В. Ломоносова, Физический факультет. Практикум кафедры физики колебаний. Электронный ресурс .msu.ru/mediawiki/upload/c/cc/Sync_detector.doc режим доступа свободный с экрана]
На чертежах, прилагаемых к описанию, приведены:
на фиг.1 - структурная схема прототипа;
на фиг.2 - структурная схема предлагаемого устройства;
на фиг.3 - схема блока формирования фазированных опорных напряжений (БФФОН);
на фиг.4 приведена геометрия задачи бистатической локации;
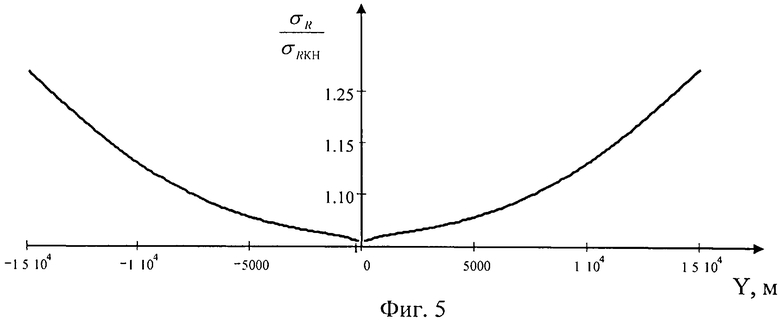
на фиг.5 приведены результаты моделирования отношения среднеквадратических ошибок (СКО) определения дальности относительно приемной позиции для прототипа и заявляемого устройства.
Устройство определения параметров движения целей содержит (фиг.2):
1 - передающее устройство (ПРД);
2.1 - передающая антенна вертикальной поляризации;
2.2 - передающая антенна горизонтальной поляризации;
3.1 - приемная антенна вертикальной поляризации;
3.2 - приемная антенна горизонтальной поляризации;
4.1. - первый приемный тракт основного канала (ПР 4.1);
4.2. - второй приемный тракт основного канала (ПР 4.2);
4.3. - приемный тракт дополнительного канала (ПР 4.3);
5 - блок формирования фазированных опорных напряжений (БФФОН);
6.1 - первый фазовый детектор (ФД 6.1);
6.2 - второй фазовый детектор (ФД 6.2);
6.3 - измеритель разности фаз (ИФ 6.3);
7.1 - первый интегратор;
7.2. - второй интегратор;
8 - фазовращатель;
9 - измеритель направления прихода интерференционного сигнала (ИНП);
10 - измеритель доплеровской частоты (ИЗМ);
11 - блок экстраполяции измеряемых параметров (зависимостей частоты Доплера и угловой координаты цели от времени);
12 - блок вычисления момента времени пересечения целью линии базы;
13 - блок определения поверхности положения;
14 - блок вычисления траекторных параметров;
15 - блок определения статистических характеристик ошибок измерения доплеровской частоты и направления прихода интерференционного сигнала;
16 - блок конечного вычисления траекторных параметров.
При этом антенны вертикальной 2.1 и горизонтальной 2.2 поляризации передающей позиции входом соединены с выходом передающего устройства 1, при этом выход приемной антенны 3.2 горизонтальной поляризации связан со входом приемного тракта 4.3 дополнительного канала, выход приемной антенны 3.1 вертикальной поляризации соединен со входами первого 4.1 и второго 4.2 приемных трактов основных каналов, при этом выход приемной антенны 3.2 горизонтальной поляризации связан со входом приемного тракта 4.3 дополнительного канала, выход приемной антенны 3.1 вертикальной поляризации соединен со входами первого 4.1 и второго 4.2 приемных трактов основных каналов, выходы которых подключены ко входам первого 6.1 и второго 6.2 фазовых детекторов соответственно, и к первому и второму входам БФФОН 5 соответственно, первый выход которого подключен ко второму входу первого разового детектора 6.1, выход второго приемного тракта 4.2 основного канала соединен также с первым входом измерителя 6.3 разности фаз, ко второму входу которого подключен выход фазовращателя 8, вход которого соединен со вторым входом второго фазового детектора 6.2 и вторым выходом БФФОН 5, третий вход которого соединен с выходом приемного тракта 4.3 дополнительного канала, выходы первого и второго фазовых детекторов 6.1 и 6,2 подключены соответственно ко входам первого 7.1 и второго 7.2 интеграторов, выходы которых являются выходами приемного устройства приемной позиции, подключенными к соответствующим входам измерителя 9 направления прихода интерференционного сигнала, выход которого соединен с третьим входом блока 13 определения поверхности положения, со вторыми входами блока 11 экстраполяции измеряемых параметров, блока 14 вычисления траекторных параметров и блока 16 конечного вычисления траекторных параметров, выход измерителя 6.3 разности фаз соединен со входом измерителя 10 доплеровской частоты, первый выход которого подключен к первому входу блока 11 экстраполяции измеряемых параметров, а второй выход - ко второму входу блока 15 определения статистических характеристик ошибок измерения доплеровской частоты и направления прихода интерференционного сигнала и четвертому входу блока 16 конечного вычисления траекторных параметров, выход блока 11 экстраполяции измеряемых параметров соединен со входом блока 12 вычисления момента времени пересечения целью линии базы и вторым входом блока 13 определения поверхности положения, первый вход которого соединен с выходом блока 12 вычисления момента времени пересечения целью линии базы, выход блока 13 определения поверхности положения подключен к первому входу блока 14 вычисления траекторных параметров, первый выход которого соединен с первым входом блока 15 определения статистических характеристик ошибок измерения доплеровской частоты и направления прихода интерференционного сигнала, выход которого соединен с первым входом блока 16 конечного вычисления траекторных параметров, а второй выход блока 14 вычисления траекторных параметров подключен к третьему входу блока 16 конечного вычисления траекторных параметров, выход которого является выходом всего устройства.
Блок формирования фазированных опорных напряжений (БФФОН) содержит согласно фиг.3:
17.1 - первый фазоизмеритель;
17.2 - второй фазоизмеритель;
18.1 - первый ключ;
18.2 - второй ключ;
19.1 - первое запоминающее устройство;
19.2 - второе запоминающее устройство;
20.1 - первый управляемый фазовращатель;
20.2 - второй управляемый фазовращатель;
21 - мультивибратор.
При этом первый 17.1 и второй 17.2 фазоизмерители параллельно соединены и их первые входы являются входами для подключения выходов первого 4.1 и второго 4.2 приемных трактов основных каналов соответственно, выход мультивибратора 21, соединен со вторыми входами первого 18.1 и второго 18.2 ключей и первого 19.1 и второго 19.2 запоминающих устройств, вторые входы первого 17.1 и второго 17.2 фазоизмерителей и первого 20.1 и второго 20.2 управляемых фазовращателей являются входами для подключения выхода приемного тракта 4.3 дополнительного канала, а выходы первого 20.1 и второго 20.2 управляемых фазовращателей являются первым и вторым выходами БФФОН 5 соответственно. Рассмотрим работу устройства в соответствии с фиг.2. Передающее устройство (ПРД) 1 генерирует монохроматическое колебание вида:

где:
АП - амплитуда зондирующего сигнала;
ω0=2πf0 - несущая частота;
φ0 - начальная фаза колебания.
Посредством передающей антенны вертикальной поляризации (АНТ) 2.1 данный сигнал канализируется от передающего устройства (ПРД) 1 в пространство.
Этот же сигнал посредством передающей антенны горизонтальной поляризации (АНТ) 2.2 излучается в направлении линии базы.
Принятый приемной антенной вертикальной поляризации (АНТ 3.1) нереотраженный целью сигнал с выхода первого приемного и второго приемного тракта основного канала (ПР 4.1) и (ПР 4.2) приемников представим как:;


где:


RΣ0 - суммарная дальность, передающая позиция - цель - приемная позиция на момент начала измерения (см. фиг.4);
RΣ - скорость изменения суммарной дальности;
φотр - скачок фазы при отражении от цели;
Δφ - набег фазы, обусловленный разностью хода волн между облучателями приемной антенны.
Опорный сигнал, принятый приемной антенной горизонтальной поляризации (АНТ 3.2), представим как:

где: L - база между РЛС.
Отраженные сигналы с выходов приемных каналов 4.1-4.3. поступают на первый второй и третий входы блока 5 формирования фазированных опорных напряжений (БФФОН), который выполняет следующие операции:
1. измерение фазового сдвига Δψ1 между сигналами UC1(t) и UОП(t);
2. сдвиг по фазе опорного сигнала 
3. измерение фазового сдвига Δψ2 между сигналами UC2(t) и UОП(t);
4. сдвиг по фазе опорного сигнала 



где: AОП1, AОП2 - амплитуды опорного напряжения, формируемые на первом и втором выходах БФФОН соответственно.
Опорные напряжения (7) и (8) подаются на вторые входы фазовых детекторов ФД 6.1 и ФД 6.2. соответственно. Поскольку фазирование осуществляется с периодом Т, меньшем времени корреляции полезного сигнала, то полезный сигнал на интервале Т можно считать гармоническим колебанием и постоянные составляющие напряжений на выходах ФД 6.1 и ФД 6.2 соответственно определим соотношениями:
поскольку период коррекции фазы T много больше периода несущей частоты сигнала, то можно считать, что

и

Оба эти соотношения определяют величины постоянных составляющих гармонических функций на интервале времени T. Поскольку T много больше, чем длительности периодов приведенных функций, то постоянные составляющие их приблизительно равны нулю. Если T=K/fc+fo, т.е. усреднение производится по К целым периодам, то постоянная составляющая точно равна нулю.
Учитывая равенство амплитуд опорных сигналов на обоих выходах блока 5, получим:


где: 
Поскольку функция типа 
С выходом фазовых детекторов ФД 6.1 и ФД 6.2. напряжения (9) и (10) поступают на входы интеграторов ИНТ 7.1 и ИНТ 7.2, где и осуществляется накопление по ряду периодов фазирования T в течение всего времени обработки сигнала, при этом амплитудные соотношения Ac1 и Ac2 сохраняются, что позволяет в 1 измерителе 9 направления прихода интерференционного сигнала (ИНП) измерить азимут цели амплитудным методом. Но в отличие от прототипа отношение сигнал/шум на первом и втором входах ИНП 9 будет выше за счет процедуры когерентного накопления за ряд периодов фазирования Т, которое осуществляется в течение всего времени нахождения цели в пределах диаграммы направленности.
Потенциальные точности определения угловой координаты и частоты Доплера подчинены зависимостям [1. см. Ширман Я.Д., Голиков В.Н., Бусыгин И.Н. и др. Под ред. Я.Д. Ширмана. Теоретические основы радиолокации, стр.290, формула 4. - М.: Сов. Радио, 1970, 560 с.], и [10. см. Тузов Г.И. Выделение и обработка доплеровской информации. М.: Советское радио, 1967 г., 255 с.]:

где θ0,5β - ширина ДНА антенны по уровню половинной мощности; TKH - время измерения (время когерентного накопления).
Точность измерения доплеровской частоты в данных системах важна, поскольку используется для измерения суммарной дальности способом, рассмотренным, например, в (8. см. патент на изобретение РФ №2154840, М. кл. G01S 13/06, опубл. 20.08.2000 г.).
В случае монохроматического зондирующего сигнала отношение сигнал/шум q по мощности на выходе когерентного накопителя (узкополосного фильтра - интегратора) равно [11. см. Охрименко А.Е. Основы радиолокации и радиоэлектронная борьба / А.Е. Охрименко. стр.234 формула (11.12). - М.: Воениздат, 1983. - 449 с.]:

где N0Σ - спектральная плотность мощности шумов; ΔFФ - полоса пропускания фильтра; ΔfC - ширина спектра сигнала; TH - время когерентного накопления; 
Поскольку увеличивается время когерентного накопления, то увеличивается отношение сигнал/шум, а следовательно, улучшаются точности измерения и угловых координат и доплеровского сдвига частоты.
Рассмотрим работу блоков 6.3. и 8. Блок 6.3 измерения разности фаз представляет собой фазовый детектор, аналогичный фазовым детекторам 6.1. и 6.2, но с ограничением амплитуды по первому входу. Следовательно, напряжение на выходе 6.3 будет зависеть только от фазовых соотношений входных сигналов. Блок 8 - фазовращатель на 0.5π, и следовательно, входное напряжение (вход 1) UC(t) блока 6.3 и опорный сигнал (вход 2) UОП(f) в момент коррекции фазы (при τ=0) становятся квадратурными. При этом выходное напряжение измерителя разности фаз 6.3 запишем в виде:

Поскольку ФНЧ, входящий в состав измерителя разности фаз 6.3, должен выделять постоянную составляющую напряжения, то его выходное напряжение равно 
причем 
Напряжение с выхода блока 6.3, пропорциональное доплеровской частоте, поступает в измеритель 10 доплеровской частоты и далее поступает на вход блока 11 определения поверхности положения (ОПП), а затем на вход блока 12 вычисления траекторных параметров (ВТП).
Рассмотрим работу блока 5 формирования фазированных опорных напряжений (БФФОН).
Быстродействующие фазоизмерители (ФИ) 17.1 и 17.2 в течение каждого периода сигнала измеряют разности фаз между опорным сигналом, приходящим с блока 4.3, и сигналами с выхода блоков 4.1 и 4.2.
В момент времени ti измеренные разности фаз ψC1(ti) и ψC2(ti) через электронные ключи 18.1 и 18.2 поступают на входы запоминающих устройств (ЗУ) 19.1 и 19. 2, где значения фазы запоминаются на период Т до прихода следующего управляющего импульса.
Сигналы с выходов ЗУ 19.1 и 19.2 поступают на управляемые фазовращатели (УФВ) 20.1 и 20.2, где происходит изменение фазы опорного напряжения на ψC1(ti) и ψC2(ti) соответственно.
Интервал Т выбирается меньшем времени корреляции фазы полезного сигнала, которое должно измеряться экспериментально для заданного класса целей, тогда можно считать, что на интервале периода фазирования T фаза опорного сигнала

Рассмотрим пример выполнения блоков предлагаемого устройства. Передающее устройство (ПРД) 1 может быть выполнено на основе известных радиопередающих устройств, как в аналогичных системах (см. 12. Филькенштейн М.И. Основы радиолокации. М.: Сов. радио, 1973, стр.93, рис.2.3.1):
Передающая антенна вертикальной поляризации 2.1 и передающая антенна горизонтальной поляризации 2.2 - могут быть выполнены на основе известных элементов антенной техники, применимых в аналогичных системах (см. 12. Филькенштейн М.И. Основы радиолокации. М.: Сов. радио, 1973, стр.93. рис.2.3.1).
Приемная антенна вертикальной поляризации 3.1 и приемная антенна горизонтальной поляризации 3.2 могут быть выполнены на основе известных элементов антенной техники, применимых в аналогичных системах (см. 12. Филькенштейн М.И. Основы радиолокации. М.: Сов. радио, 1973, стр.93, рис.2.3.1).
Первый приемный тракт основного канала (ПР 4.1), второй приемный тракт основного канала (ПР 4.2), приемный тракт дополнительного канала (ПР 4.3), являются типовыми элементами приемного тракта РЛС и могут быть выполнены по аналогии с блок-схемой доплеровского радиолокатора (см. 1. Теоретические основы радиолокации. Под. ред. Ширмана Я.Д., М.: Советское радио, 1970, стр.356, рис.6.26).
Блок 5 формирования фазированных опорных напряжений (БФФОН), а также элементы его составляющие: первый фазоизмеритель - 17.1, второй фазоизмеритель - 17.2, первый ключ 18.1 и второй ключ 18.2, первое запоминающее устройство 19.1, второе запоминающее устройство - 19.2, первый управляемый фазовращатель 20.1, второй управляемый фазовращатель, 20.2 и мультивибратор 21, а также блок 11 экстраполяции измеряемых параметров (зависимостей частоты Доплера и угловой координаты цели от времени), блок 12 вычисления момента времени пересечения целью линии базы, блок 13 определения поверхности положения, блок 14 вычисления траекторных параметров, блок 15 определения статистических характеристик ошибок измерения доплеровской частоты и направления прихода интерференционного сигнала и блок 16 конечного вычисления траекторных параметров, первый фазовый детектор (ФД 6.1), второй фазовый детектор (ФД 6.2), измеритель разности фаз (ИФ 6.3), первый интегратор 7.1 и второй интегратор 7.2 и фазовращатель 8 по своей сути представляют устройства, реализующие вычислительные процедуры и могут быть выполнены как (13. см. Патент РФ на полезную модель РФ №72339, М. кл. G06F 15/16, опубл. 10.04.2008).
Измеритель 9 направления прихода интерференционного сигнала (ИНП) основан на использовании амплитудного моноимпульсного метода, поэтому блок может быть выполнен на основе схемы сравнения амплитуд или схемы вычитания [1. Теоретические основы радиолокации. Под. ред. Ширмана Я.Д. М.: Советское радио, 1970, 560 стр., стр.297, рис.5.62.). Измеритель 10 доплеровской частоты (ИЗМ) выполнен в виде резистивного масштабирующего устройства, поскольку с выхода фазового детектора 6.3 поступает постоянное напряжение, пропорциональное доплеровской частоте.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕЛИ | 2012 |
|
RU2515562C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕЛИ | 2019 |
|
RU2714672C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕЛИ | 2015 |
|
RU2584332C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА | 1999 |
|
RU2154840C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 2010 |
|
RU2444757C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ С ЗАЩИТОЙ ОТ ШУМОВЫХ АКТИВНЫХ ПОМЕХ | 2003 |
|
RU2246736C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕЛИ | 1999 |
|
RU2168740C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА | 1998 |
|
RU2133480C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА С ЗАЩИТОЙ ОТ АКТИВНЫХ ШУМОВЫХ ПОМЕХ | 2006 |
|
RU2324198C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕЛИ | 1997 |
|
RU2124220C1 |
Изобретение относится к области радиолокации. Достигаемый технический результат - повышение точности оценки координат цели за счет реализации процедуры когерентного накопления. Указанный результат достигается за счет того, что устройство содержит передающую позицию и в удаленной от нее точке приемную позицию, при этом в передающей позиции имеются передающие антенны горизонтальной и вертикальной поляризации, входом соединенные с выходом передающего устройства, а в приемной позиции антенна состоит из приемных антенн горизонтальной и вертикальной поляризации, связанных с приемным устройством, которое содержит помимо первого и второго приемных трактов основных каналов приемный тракт дополнительного канала, блок формирования фазированных опорных напряжений, первый и второй фазовые детекторы, измеритель разности фаз, первый и второй интеграторы, выходы которых являются выходами соответствующего приемного устройства приемной позиции, и фазовращатель, соответствующим образом связанные между собой, при этом выход приемной антенны горизонтальной поляризации связан со входом приемного тракта дополнительного канала, выход приемной антенны вертикальной поляризации соединен со входами первого и второго приемных трактов основных каналов, выходы приемной позиции подключены к соответствующим входам измерителя направления прихода интерференционного сигнала, последовательно соединенных измерителя доплеровской частоты, блока экстраполяции измеряемых параметров, блока вычисления момента времени пересечения целью линии базы, блока определения поверхности положения и блока вычисления траекторных параметров, а также блока определения статистических характеристик ошибок измерения доплеровской частоты и направления прихода интерференционного сигнала, выходом связанного со входом блока конечного вычисления траекторных параметров. 1 з.п. ф-лы, 5 ил.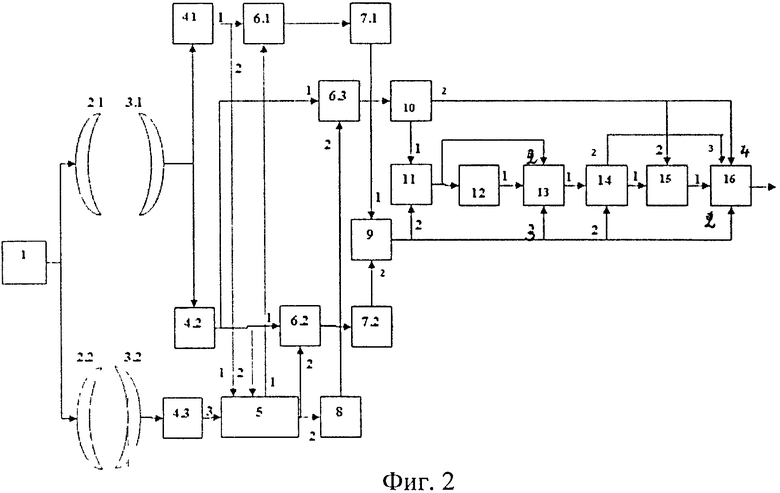
1. Устройство для определения параметров движения объекта, содержащее передающую позицию и в удаленной от нее точке приемную позицию, состоящую из антенны, соединенной со входом двухканального приемного устройства, выходы которого подключены к соответствующим входам измерителя направления прихода интерференционного сигнала, последовательно соединенных измерителя доплеровской частоты, блока экстраполяции измеряемых параметров, блока вычисления момента времени пересечения целью линии базы, блока определения поверхности положения и блока вычисления траекторных параметров, а также блока определения статистических характеристик ошибок измерения доплеровской частоты и направления прихода интерференционного сигнала, выходом связанного со входом блока конечного вычисления траекторных параметров, выход которого является выходом приемной позиции, при этом выход измерителя направления прихода интерференционного сигнала соединен со вторыми входами блока экстраполяции измеряемых параметров, блока вычисления траекторных параметров, блока конечного вычисления траекторных параметров, выход блока экстраполяции измеряемых параметров соединен со вторым входом блока определения поверхности положения, второй выход блока вычисления траекторных параметров соединен с третьим входом блока конечного вычисления траекторных параметров, выход которого является выходом всего устройства, отличается тем, что передающая позиция содержит передающие антенны горизонтальной и вертикальной поляризации, входом соединенные с выходом передающего устройства, в приемной позиции антенна состоит из приемных антенн горизонтальной и вертикальной поляризации, приемное устройство содержит помимо первого и второго приемных трактов основных каналов приемный тракт дополнительного канала, блок формирования фазированных опорных напряжений (БФФОН), первый и второй фазовые детекторы, измеритель разности фаз, первый и второй интеграторы, выходы которых являются выходами приемного устройства приемной позиции, и фазовращатель, при этом выход приемной антенны горизонтальной поляризации связан со входом приемного тракта дополнительного канала, выход приемной антенны вертикальной поляризации соединен со входами первого и второго приемных трактов основных каналов, выходы которых подключены ко входам первого и второго фазовых детекторов соответственно, и к первому и второму входам БФФОН соответственно, первый выход которого подключен ко второму входу первого фазового детектора, выход второго приемного тракта основного канала соединен также с первым входом измерителя разности фаз, ко второму входу которого подключен выход фазовращателя, вход которого соединен со вторым входом второго фазового детектора и вторым выходом БФФОН, третий вход которого соединен с выходом приемного тракта дополнительного канала, выходы первого и второго фазовых детекторов подключены соответственно ко входам первого и второго интеграторов, выходы которых являются выходами приемного устройства приемной позиции, выход измерителя направления прихода интерференционного сигнала дополнительно соединен с третьим входом блока определения поверхности положения, а второй выход измерителя доплеровской частоты подключен к четвертому входу блока конечного вычисления траекторных параметров.
2. Устройство по п.1, отличающееся тем, что блок формирования фазированных опорных напряжений (БФФОН) состоит из параллельно соединенных первого и второго фазоизмерителей, первые входы которых являются входами для подключения выходов первого и второго приемных трактов основных каналов соответственно, первого и второго ключей, первого и второго запоминающих устройств, первого и второго управляемых фазовращателей, мультивибратора, выход которого соединен со вторыми входами первого и второго ключей и первого и второго запоминающих устройств, вторые входы первого и второго фазоизмерителей и первого и второго управляемых фазовращателей являются входами для подключения выхода приемного тракта дополнительного канала, а выходы первого и второго управляемых фазовращателей являются первым и вторым выходами БФФОН соответственно.
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА | 1999 |
|
RU2154840C1 |
| Высокотемпературная керосиновая горелка | 1957 |
|
SU109869A1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ НЕСКОЛЬКИХ ОБЪЕКТОВ В МНОГОКАНАЛЬНЫХ ДОПЛЕРОВСКИХ РЛС | 2008 |
|
RU2373551C1 |
| СПОСОБ И СИСТЕМА ДЛЯ РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ СКОРОСТЕЙ И КООРДИНАТ ОБЪЕКТОВ (ВАРИАНТЫ) | 2002 |
|
RU2239845C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 2010 |
|
RU2444757C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВОЗДУШНО-СКОРОСТНЫХ ПАРАМЕТРОВ ПОЛЕТА ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2006 |
|
RU2314541C1 |
| ДВУХПОЗИЦИОННЫЙ ТЕРМОРЕГУЛЯТОР | 0 |
|
SU334560A1 |
| US 7071868 B2, 04.07.2006 | |||
| US 4806936 A, 21.02.1989 | |||

