Изобретение относится к области радиоэлектроники, в частности к способу автоматизированного беспроводного обнаружения изменения угла наклона контролируемых объектов или их пространственного положения, которые расположены на расстоянии от лиц, контролирующих их положение, и может быть использовано для удаленного своевременного обнаружения изменения положения в пространстве контролируемых объектов, а также для мониторинга работы средств механизации, дорожной и строительной техники, выявления колебаний объекта (ударов по нему).
В настоящее время для контроля углов столбов, вышек и т.п.осуществляется периодический выезд специалистов к местам их расположения и контроль углов при помощи специализированной аппаратуры. При этом используют различные методы измерения угла наклона, например: метод сравнения с жесткими контрольными инструментами (угловыми мерами, угольниками, конусными калибрами и шаблонами); абсолютный гониометрический метод, основанный на использовании приборов с угломерной шкалой (нониусные, индикаторные и оптические угломеры); косвенный тригонометрический метод, основанный на определении линейных размеров, связанных с измеряемым углом тригонометрической функцией (синусные линейки, конусомеры).
Существенным недостатком такого способа контроля угла наклона является высокая стоимость проведения частого контроля и невозможность проведения контроля с сопоставимой частой в связи с необходимостью выезда специалиста к месту установки объекта контроля.
Для удаленного контроля положения рабочих частей (средств) строительной и дорожно-строительной техники могут применятся средства, которые интегрируются со средствами управления техникой и передающие показания беспроводным способом или осуществляющим запись в специализированные устройства. В данном случае для реализации контроля угла наклона могут применяться различные беспроводные датчики, например, беспроводной наклономер (см., например, сайт в Интернет https.//monsol.ru/besprovodnoy-naklonmer-ls-g6-inc 15/).
Недостатком таких способов является необходимость проведения дорогостоящих работ по интеграции устройства для каждого типа и модели строительной или дорожной техники.
Наиболее близким к предложенному изобретению является способ контроля угла наклона опор контактной сети железных дорог, заключающийся в том, что со стороны рельсового пути на штативе, оборудованном пузырьковым уровнем, устанавливают лазерный дальномер, определяют первую точку замера, расположенную на уровне головки рельса, определяют вторую точку замера, расположенную по высоте на расстоянии одного метра от первой точки замера, полученные результаты измерений, а также марку опоры, включающую высоту и конусность опоры, вводят в мобильное электронное устройство со специальной программой, которая рассчитывает по заданным параметрам угол наклона опоры контактной сети, сравнивает результаты расчетов с нормативными, при превышении нормативного уровня на дисплее электронного мобильного устройства появляется сигнал об аварийном состоянии опоры (см. Патент RU 2660195, опубликован 05.07.2018 г.).
Недостатками данного решения являются:
- необходимость периодической инспекции опор на месте ее установки, что влечет за собой невозможность его частого проведения, невозможность выявления опасных опор чаще, чем периодичность выезда, высокая стоимость ввиду вовлеченности в процесс персонала и транспортных средств;
- невысокий уровень автоматизации способа, ввиду того что: требуется ручной контроль установки штатива по пузырьковому указателю, а также ручной ввод данных измерения лазерного дальномера в специальную программу.
Технической проблемой, решаемой изобретением, является устранение всех вышеперечисленных недостатков, а также возможность автоматизированного контроля угла наклона и пространственного положения любых объектов беспроводными средствами без какой-либо модификации таких объектов.
Техническим результатом изобретения является повышение точности и надежности мониторинга угла наклона и пространственного положения объектов, а также повышение информативности и достоверности информации об изменении угла наклона или пространственного положения, обеспечение возможности своевременного обнаружения изменения угла наклона или пространственного положения объектов, обеспечение возможности удаленного автоматизированного мониторинга угла наклона или пространственного положения с применением бесконтактных датчиков, снижение стоимости ввода в действие и снижение стоимости эксплуатации за счет отсутствия необходимости прокладки проводных коммуникаций, обеспечение возможности долгосрочной работы без необходимости технического обслуживания за счет исключения подвижных механических частей.
Технический результат достигается благодаря реализации способа мониторинга угла наклона объекта контроля, заключающегося в том, что на объекте контроля устанавливают беспроводной датчик угла наклона, с помощью которого с использованием LPWAN или NBIoT технологии периодически отправляют сообщения на по меньшей мере одну базовую станцию, установленную в зоне распространения радиосигнала указанного датчика, причем каждое сообщение от указанного датчика содержит идентификационные данные указанного датчика и текущее значение угла наклона объекта контроля, с помощью по меньшей мере одной базовой станции принимают от указанного датчика каждое сообщение, обрабатывают его и отправляют на сетевой сервер, с помощью сетевого сервера принимают от по меньшей мере одной базовой станции каждое сообщение, обрабатывают его и отправляют на электронное устройство пользователя, причем отправку сообщений указанным датчиком осуществляют периодически с постоянными интервалами времени при неизменном угле наклона объекта контроля или при изменении угла наклона в пределах заданного максимального значения, а при изменении угла наклона более заданного максимального значения осуществляют немедленную передачу сообщений с меньшими интервалами времени, по которым пользователь судит об изменении угла наклона более заданного максимального значения.
Кроме того, при принятии по меньшей мере одной базовой станцией сообщений от указанного датчика, на ней могут осуществлять фильтрацию принятых сообщений путем отбрасывания искаженных и/или ложных сообщений.
Кроме того, при принятии сетевым сервером от по меньшей мере одной базовой станции сообщений, на нем могут осуществлять фильтрацию принятых сообщений путем отбрасывания искаженных и/или ложных сообщений, и могут осуществлять агрегацию принятых сообщений путем объединения в одно сообщение одного и того же сообщения, принятого разными базовыми станциями.
Кроме того, до начала отправки сообщений на по меньшей мере одну базовую станцию могут осуществлять настройку периодичности отправки сообщений.
Кроме того, электронное устройство пользователя имеет программное обеспечение, при этом могут осуществлять настройку сетевого сервера для этого программного обеспечения путем внесения идентификационных данных указанного датчика в базу данных сетевого сервера и ассоциации с программным обеспечением электронного устройства пользователя, а сетевой сервер может осуществлять хранение полученных от по меньшей мере одной базовой станции сообщений, а также значений угла наклона, и может осуществлять определение программного обеспечения электронного устройства пользователя, с которым ассоциирован указанный датчик.
Кроме того, указанный датчик выполнен, преимущественно, бесконтактным и включает корпус, трехосевой акселерометр, процессор управления с программным обеспечением, радиомодем, элемент питания, антенну и выключатель.
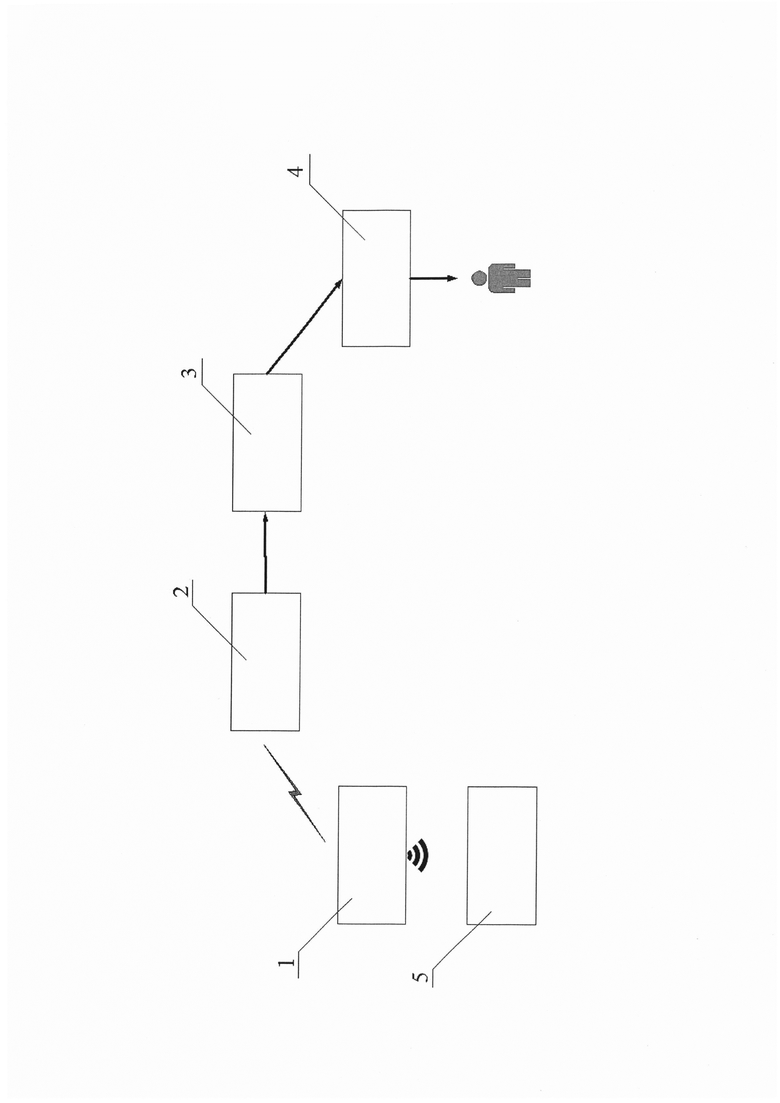
Изобретение поясняется чертежом, где на фигуре которого схематично показана связь элементов, с помощью которых осуществляется предложенный способ.
Предложенный способ автоматизированного беспроводного мониторинга угла наклона предназначен для своевременного обнаружения изменения угла наклона или положения в пространстве таких объектов контроля, как: столбы освещения, столбы связи, рекламные щиты, опоры контактных и электрических сетей, иные опорные конструкции и другие объекты, положение которых должно быть строго вертикальное или близкое к нему, либо строго горизонтальное или близкое к нему. Также предложенный способ предназначен для выявления колебаний объектов, (сильных) ударов по объекту, сломанных деревьев или их веток, для мониторинга средств механизации, дорожной и строительной техники - экскаваторов, кранов, самосвалов, бульдозеров и пр. Применение предложенного способа для мониторинга угла наклона не ограничено перечисленными объектами, положение которых необходимо контролировать и способ может применяться на любых объектах, пространственное положение которых должно быть неизменным, а также положение которых может меняться, но, например, при определенных условиях работы таких объектов, т.е. можно контролировать сам факт того, что положение меняется (работает кран, идет уборка снега и пр,), в каких диапазонах меняется положение (например, грузовику нельзя вываливать кузов находясь вне специально заданной зоны. В данном случае будет иной алгоритм осуществления способа, не отходя от сути нижеизложенного способа, и пользователю на электронное устройство будет отправляться не сообщение «изменение положения», а будут отправляться текущие значения угла объекта, что при совмещении их с данными о местоположении объекта позволяет осуществлять полный контроль).
Предложенный способ реализуется с помощью совокупности технических средств, связанных между собой беспроводными каналами связи и включающих в себя (но, не ограничиваясь): бесконтактный беспроводной датчик 1 угла наклона; базовую станцию 2 (сетевой шлюз); сетевой сервер 3 обработки информации (данных); электронное устройство 4 конечного пользователя со специальным программным обеспечением (приложение пользователя), при этом в качестве электронного устройства 4 могут использовать телефон, смартфон, планшет, ноутбук, персональный компьютер или иное устройство (программное обеспечение или сервис), с помощью которого пользователь осуществляет мониторинг угла наклона или пространственного положения объектов 5 контроля.
Датчик 1 представляет собой LPWAN или NBIoT датчик угла наклона и содержит корпус, выполненный в виде полой трубки, преимущественно, цилиндрической формы (или иной формы). Внутри корпуса расположены: источник питания (элемент питания), трехосевой акселерометр, с которым связан процессор (контроллер) управления со встроенным программным обеспечением, радиопередающее устройство, связанное с процессором и включающее в себя радиомодем (он же сетевой модуль, причем контроллер может быть совмещен с сетевым модулем) и антенну. На корпусе имеется выключатель, предназначенный для включения и выключения датчика 1. Процессор управления осуществляет опрос акселерометра, анализ и обработку данных, полученных от акселерометра, передачу данных (сообщений, сигналов) на радиомодем, а также хранение настроек периодичности отправки сообщений. Процессор (контроллер) управления со встроенным программным обеспечением может осуществлять фильтрацию поступающих с акселерометра данных с целью выявления (или наоборот игнорирования) колебаний, изменения положения, вибрации и сильных ударов. Радиомодем обеспечивает передачу данных (сообщений, сигналов), полученных от процессора, в сети передачи данных (по радиоканалу на базовую станцию), а также хранение необходимых параметров для работы в соответствующей сети передачи данных. Причем в случае передачи сообщений с использованием LPWAN технологии, то сетевой модуль представляет собой радиомодуль, который передает данные по LPWAN каналу; а в случае передачи сообщений с использованием NBIoT технологии, то сетевой модуль представляет собой NBIoT модуль, т.е. модем сотовой связи и для передачи данных используется протокол сотовой сети передачи данных. Элемент питания предназначен для обеспечения автономности работы датчика 1, и соединен с радиомодемом и с процессором. Антенна предназначена для обеспечения передачи сообщений (сигналов) в радиоканал (сотовую сеть). Для контроля угла наклона объектов 5 применяется широкораспостраненная и зарекомендовавшая себя технология многоосевых датчиков ускорения, применяемых в мобильных средствах и носимой электронике.
Датчик 1 соединен посредством беспроводных каналов связи с базовой станцией 2 (или с несколькими базовыми станциями 2) и обеспечивает передачу на базовую станцию 2 сообщений, содержащих данные о значениях угла наклона объектов 5.
Способ автоматизированного беспроводного мониторинга угла наклона с использованием датчика 1, базовой станции 2, сетевого сервера 3 и электронного устройства 4 пользователя со специальным программным обеспечением заключается в следующем.
Для реализации предложенного способа важным является размещение датчика 1 и обеспечение конфигурирования сетевого сервера 3 таким образом, чтобы обеспечивалась доставка сообщений от датчика 1 до приложения электронного устройства 4 пользователя. Для этого осуществляют настройку сетевого сервера 3 для приложения устройства 4 пользователя. На данном этапе уникальные идентификаторы (идентификационные данные) датчика 1 (или нескольких датчиков 1, в зависимости от их используемого количества в месте мониторинга) вносятся в базу данных сервера 3 и ассоциируются с приложением электронного устройства 4 пользователя. Уникальным идентификатором датчика 1 является, например, сетевой адрес или идентификационный номер датчика 1 (ID) или ICCID, или иное (определяется применяемой технологией LPWAN или NBIoT).
LPWAN или NBIoT датчик 1 устанавливают внутри объекта контроля или снаружи (в зависимости от объекта контроля и его конфигурации). Причем датчик 1 может быть закреплен любым возможным способом на объекте 5.
Перед установкой датчика 1 на объекте 5, угол наклона которого (пространственное положение) необходимо контролировать (осуществлять мониторинг), проводят следующее: а) подготовка датчика 1 к работе в соответствии с рекомендациями производителя, в том числе настройка периодичности отправки сообщений и типа алгоритма работы; б) определение оптимального места для размещения датчика 1 в соответствии с рекомендациями производителя; в) установка (размещение) датчика 1 на контролируемых объектах 5, причем для установки датчика 1 может потребоваться подготовка крепежа и/или подготовка самого объекта. При этом отсутствуют существенные ограничения на место установки (крепежа) датчика 1. Методы крепежа датчика 1 не ограничены и могут быть любыми.
Датчик 1 может работать как минимум по двум алгоритмам работы. Первый алгоритм работ отправляет по расписанию сообщения типа «контроль канала» означающие, что положение не менялось и сообщения типа «положение изменилось» вне расписания и сразу после выявления изменения положения или после выявления колебаний или ударов.
Второй алгоритм работы подразумевает, что датчик 1 отправляет по расписанию сообщения, содержащие значения текущего угла и вне расписания отправляются сообщения, содержащие значения текущего угла при его существенном изменении.
При работе по второму алгоритму, сразу после включения датчика 1 он в течение короткого срока (например, 20-300 сек) определяет свое «нулевое» положение, от которого в дальнейшем будет происходить расчет угла отклонения. Также могут применяться модификации датчика 1, которые перенастроены на измерение угла или от вертикали, или от горизонтали. Это необходимо для того, чтобы включенный датчик 1 смонтировали и установили на объекте контроля (столб, вышка, опорная конструкция, люк, дерево и прочее). Если отклонение датчика 1 превышает настроенное значение (например, 5 градусов), то датчик 1 передает сообщение вне расписания со своим текущим положением. Если отклонение датчика 1 не менялось более чем на настроенное значение (например, 5 градусов), то датчик 1 передает по расписанию свое текущее положение.
После того, как датчик 1 установлен на объекте 5 контроля и настроен, осуществляют непосредственный мониторинг угла наклона (пространственного положения) объектов 5.
Размещенный на объекте 5 датчик 1 осуществляет непрерывный автоматизированный мониторинг угла наклона объекта 5. Датчик 1 с помощью процессора осуществляет опрос акселерометра, обработку данных и передачу их на радиомодем. При обработке данных осуществляется пересчет значений акселерометра в значение угла относительно вертикальной оси.
Посредством радиопередающего устройства периодически отправляют в радиоканал сообщения первого типа. Сообщения первого типа означают неизменность угла и содержат закодированное сообщение «положение не менялось» (при работе по первому алгоритму) или значение угла наклона в сообщениях (при работе по второму алгоритму). Периодическая отправка сообщений осуществляется с помощью радиопередающего устройства с использованием LPWAN технологии или с использованием NBIoT технологии (в зависимости от наличия зоны покрытия в месте установки датчика 1, дальности передачи сигнала от радиопередающего устройства и пр.). Сообщения отправляют на базовую станцию 2 (или на несколько базовых станций 2), установленную в зоне распространения радиосигнала радиопередающего устройства. Причем до начала отправки сообщений на базовую станцию 2, на датчике 1 (на процессоре) осуществляют настройку периодичности отправки сообщений и тип алгоритма работы датчика 1. Настройка периодичности отправки осуществляется, преимущественно, для сообщений о неизменности угла наклона или его изменении в пределах заданного максимального значения (например, от 5° до 15° в зависимости от объекта контроля и его необходимом допустимом положении).
Каждое сообщение от датчика 1 содержит идентификационные данные беспроводного датчика 1 и сообщение со значением угла наклона объекта 5 или без него. При неизменном положении объекта 5 (т.е. при неизменности угла наклона) или при небольшом изменении угла наклона, т.е. в пределах заданного максимального значения, которое может составлять, например, от 5° до 15°, в радиоканал передаются сообщения первого типа («периодические показания угла наклона»).
Таким образом, сообщения первого типа отправляют при стабильном неизменном угле наклона объекта 5 или при незначительном (не критичном) изменении угла наклона. Сообщения первого типа отправляют периодически с постоянными интервалами времени, которые задаются пользователем. При этом пользователь в зависимости от задачи контроля, от условий эксплуатации, от своих потребностей и от объекта 5, положение которого необходимо контролировать и на котором установлен датчик 1, может настроить любые интервалы времени для отправки сообщений (через несколько секунд или через несколько минут, или через каждый час, или один раз в день в определенное время, или один раз месяц в определенное время соответствующего дня и так далее).
В случае обнаружения по сравнению с предыдущими показаниями резкого изменения угла наклона более, чем на величину заданного максимального значения (свыше 5-15°), либо при постоянно изменяющемся значении угла наклона в короткие промежутки времени, автоматически осуществляется немедленная (моментальная) внеочередная передача сообщения второго типа. Сообщения второго типа отправляют вне установленного пользователем расписания для первого типа сообщений и с меньшими интервалами времени (например, через секунду или через минуту, или через час, но не более интервала времени, установленного для сообщений первого типа). Таким образом, сообщение «тревога» передается при резком изменении угла наклона объекта 5, либо при постоянно изменяющемся угле наклона в короткие промежутки времени (при превышении заданных граничных значений). Сообщение второго типа содержит закодированное сообщение «изменение положения» (при работе по первому алгоритму) или изменившееся значение угла (при работе по второму алгоритму). По сообщениям второго типа пользователь судит об изменении угла наклона более заданного максимального значения.
Таким образом, устройство 1 передает два типа сообщений: означающих или неизменность угла, или его изменение.
Сообщение первого типа «предназначено для передачи приложению пользователя информации о факте работоспособности самого датчика 1 и радиоканала до базовой станции 2, а также для отражения текущих значений угла наклона объекта 5. Сообщение типа «тревога» отправляется при обнаружении изменения угла наклона объекта 5 более нормального угла наклона, причем для минимизации вероятности недоставки сообщений типа «тревога» они отправляются многократно (например, 2-5 раз, или большее количество раз в зависимости от потребности пользователя).
В зависимости от алгоритма работы, после того как угол объекта изменился и было отправлено соответствующее сообщение, угол, относительно которого осуществляется измерение может принять новое значение (например, новое фактическое положение объекта) или остаться прежним (определенным при включении) или быть жестко равным горизонтали или вертикали.
Для отправки датчиком 1 сообщений (радиосигналов) используется LPWAN технология или NBIoT технология, причем протокол передачи данных (сотовой сети) определяется применяемой в конкретном случае LPWAN технологией или NBIoT технологией. Частотный диапазон зависит от применяемой в конкретном случае LPWAN технологии или NBIoT технологии и действующих в конкретном регионе правил и разрешений.
Для приема сообщений от датчика (датчиков) 1 в зоне распространения радиосигнала радиопередающего устройства должна присутствовать по меньшей мере одна базовая станция 2 (сетевой шлюз). Однако может быть и большее количество базовых станций 2, причем для приема сообщения от датчика 1 могут использоваться уже заранее установленные базовые станции 2, либо при их отсутствии в зоне распространения сигнала от датчика 1 устанавливают базовую станцию 2 (или несколько базовых станций 2).
После отправки датчиком 1 сообщений, с помощью базовой станции 2 (или нескольких базовых станций 2) принимают от датчика 1 каждое сообщение, обрабатывают его и отправляют его на сетевой сервер 3.
Базовая станция 2 (базовые станции) осуществляет безусловную автоматизированную передачу принятых из радиоканала сообщений на сервер 3 обработки сообщений (с учетом необходимости фильтрации сообщений). Базовая станция 2 осуществляет отправку сообщения на сервер 3 немедленно после его получения из радиоэфира от датчика 1. Способ передачи данных базовой станцией 2 на сервер 3 определяется конкретной моделью базовой станции 2. В частности, распространены следующие способы - через оптоволоконный канал, ethernet канал, через сотовую сеть и через WiFi. Используемый канал передачи данных определяется составом поддерживаемых сетевым шлюзом протоколов и передачи данных.
Сервер 3 может быть расположен как в «облаке», так и на стороне пользователя, это определяется применяемой в конкретном случае LPWAN технологией или NBIoT технологией.
После принятия сервером 3 каждого сообщения от базовой станции 2, сетевой сервер 3 осуществляет обработку каждого принятого от базовой станции 2 (станций) сообщения и передачу этих сообщений приложению конечного пользователя на его электронное устройство 4.
Помимо того, что сетевой сервер 3 осуществляет обработку сообщений, полученных от базовой станции 2 и передачу сообщений приложению конечного пользователя, сервер 3 также осуществляет хранение полученных от базовой станции 2 сообщений, хранение значений угла наклона объектов 5 и определение приложения электронного устройства 4 пользователя, с которым ассоциированы датчики 1.
Все принятые от датчика 1 сообщения должны пройти фильтрацию и агрегацию. Это необходимо для выявления сообщений, которые были искажены в процессе передачи по радиоканалу и удаления их из дальнейшей обработки. Фильтрация может проводиться как на базовой станции 2 (сетевом шлюзе) при принятии сообщений от датчика 1, так и на сетевом сервере 3 при принятии сообщений от базовой станции 2. Агрегация проводится на сетевом сервере 3 при принятии сообщений от базовой станции 2 (базовых станций). При фильтрации сообщений осуществляется отбрасывание искаженных сообщений и/или ложных сообщений, т.е. отбрасывают как искаженные сообщения, так и ложные, или отбрасывают только искаженные, если отсутствуют ложные сообщения, или отбрасывают только ложные, если отсутствуют искаженные сообщения. Агрегация сообщений осуществляется для объединения в одно сообщение одного и того же сообщения, принятого на разных базовых станциях 2.
После того, как сетевой сервер 3 принял от базовой станции 2 каждое сообщение, обработал его, с помощью сетевого сервера 3 отправляют уже обработанные сообщения посредством канала передачи данных на электронное устройство 4 пользователя (приложению пользователя), при этом каждое обработанное сообщение включает идентификационные данные датчика 1 (например, его уникальный идентификатор) и значение угла наклона объекта 5. Метод передачи данных определяется составом поддерживаемых сетевым сервером 3 и приложением пользователя протоколов. Примером передачи данных может быть общедоступный или проприетарный API или открытый протокол MQTT (Message Queuing Telemetry Transport) или иной пригодный для передачи данных протокол.
При получении электронным устройством 4 от сервера 3 каждого обработанного сообщения на устройстве 4 с помощью приложения осуществляют сопоставление идентификационных данных датчика 1 (соотнесение идентификатора датчика 1) с физическим объектом 5 контроля, на котором установлен датчик 1, и осуществляют уведомление (информирование) пользователя. Информирование пользователя осуществляют путем периодической отправки ему сообщений (через определенные периоды времени, настраиваемые пользователем), включающих идентификационные данные датчика 1 и текущее значение угла наклона объекта 5 (первый тип сообщения - «периодические показания угла наклона»). При получении такого типа сообщения пользователь с помощью своего устройства 4 может в любое время проверить состояние работоспособности датчика 1 и радиоканала, а также убедиться в неизменности угла наклона объекта 5, или в незначительном (некритичном) его изменении. При этом электронное устройство 4 при периодическом получении сообщения «периодические показания угла наклона» может автоматически оповещать (информировать) пользователя о работоспособности путем воспроизведения сигнала любым возможным способом (воспроизведение звукового сигнала, световая индикация, вибрация и т.п.), а может находиться в пассивном состоянии (состоянии покоя) и пользователь самостоятельно с помощью приложения может проверить работоспособность датчика 1 и радиоканала, а также текущее значение угла наклона объекта 5 (в данном случае при открытии пользователем приложения на своем устройстве 4, приложение может информировать пользователя любым указанным способом). А при резком изменении угла наклона объекта 5 или при постоянном изменении угла наклона в короткий промежуток времени, т.е. при изменении угла наклона более заданного максимального значения, пользователя уведомляют путем отправки ему сообщения, включающего идентификационные данные датчика 1 и сигнал тревоги (второй тип сообщения - «тревога»). Таким образом, при изменении угла наклона объекта 5, пользователя уведомляют об этом с помощью его устройства 4 путем воспроизведения сигнала тревоги и пользователь может оперативно отреагировать и предпринять необходимые меры для исключения негативных последствий изменения пространственного положения объектов 5.
Метод информирования (уведомления) пользователя может быть любым, например, путем подачи тревожного сигнала на устройстве 4 или путем световой индикации, или вибрация устройства 4, или любым иным возможным способом, в том числе комбинацией указанных методов. Причем приложение пользователя может отображать, например, карту расположения объектов 5 мониторинга с датчиками 1 или список таких объектов, и пользователь имеет возможность в режиме реального времени, находясь на любом расстоянии от объекта 5, проверить угол наклона объекта 5.
Таким образом, благодаря реализации предложенного способа обеспечивается непрерывный мониторинг угла наклона в любых местах и любых объектов 5, которые необходимо контролировать.
Если кратко охарактеризовать предложенный способ, то он осуществляется следующим образом. Датчик 1 периодически отправляет сообщения типа «периодические показания угла наклона» на базовую станцию 2, которая отправляет эти сообщения на сервер 3, а далее сервер 3 обрабатывает полученные сообщения и отправляет их на электронное устройство 4 пользователя. Сообщение «периодические показания угла наклона» отправляется с необходимой для пользователя периодичностью с постоянными интервалами времени и пользователь в любое время может с помощью приложения своего устройства 4 проверить работоспособность датчика 1 и радиоканал, а также текущее значение угла наклона объекта 5. Как только угол наклона объекта 5 изменится более критичного значения, датчик 1 незамедлительно отправляет сообщение типа «тревога» также на базовую станцию 2, которая отправляет это сообщение на сервер 3, а далее сервер 3 обрабатывает это сообщение и отправляет его на устройство 4 пользователя. При получении приложением устройства 4 пользователя такого типа сообщения («тревога»), устройство 4 уведомляет пользователя о факте изменения угла наклона объекта 5 путем подачи тревожного сигнала на устройстве 4 или путем световой индикации или любым иным возможным способом. При получении сообщения типа «тревога» пользователь может незамедлительно отреагировать на изменение угла наклона и предпринять необходимые меры для устранения неблагоприятных последствий.
Благодаря использованию базовых станций 2, сообщения от датчика 1 могут быть переданы на любые расстояния, причем пользователь может находиться в любом месте и на любом расстоянии от датчика 1. В соответствии с общепринятой идеологией построения LPWAN сетей или NBIoT сетей размещение базовых станций 2 (сетевых шлюзов) и обеспечение зоны радиопокрытия является задачей оператора связи.
Кроме того, благодаря предложенному способу обеспечивается:
- удаленный автоматизированный контроль угла наклона без необходимости прокладки проводных коммуникаций и внесения изменений в конструкцию контролируемого объекта 5;
- применение датчика 1 без движущихся частей позволяет сохранить его в сохранности в течение всего срока эксплуатации, при этом отсутствует необходимость в обслуживании датчика 1 и обеспечивается долгая работа датчика 1 от одного элемента питания;
- отсутствие существенных ограничений на способ и место крепежа датчика 1 ввиду широкой области контроля;
- низкая стоимость датчиков 1 и совокупная стоимость владения системой за счет долго срока работы датчиков 1 и отсутствия необходимости обслуживания датчиков 1;
- снижение стоимости на внедрение системы и малый срок внедрения, а также снижение стоимости на дальнейшую эксплуатацию;
- для осуществления контроля угла для столбов и вышек и т.п. не требуется выезд на место специалиста и использование специализированных дорогостоящих средств.
Благодаря применению бесконтактного датчика 1 для измерения угла наклона, исключается необходимость применения подвижных механических частей, а также оптических или иных датчиков, использование которых не целесообразно ввиду их высокой стоимости.
Архитектурное решение основано на общепринятой архитектуре IoT, в которой предусмотрено наличие сетевого шлюза, сервера обрабатывающего сообщения и передающего их приложению пользователя.
Изобретение относится к способу мониторинга угла наклона объекта контроля. На объекте контроля устанавливают беспроводной датчик угла наклона, с помощью которого с использованием LPWAN или NBIoT технологии периодически отправляют сообщения минимум на одну базовую станцию, установленную в зоне распространения радиосигнала указанного датчика. Каждое сообщение от датчика содержит идентификационные данные датчика и текущее значение угла наклона объекта контроля. С помощью минимум одной базовой станции принимают сообщение от датчика, обрабатывают его и отправляют на сетевой сервер. С помощью сетевого сервера принимают сообщение минимум от одной базовой станции, обрабатывают его и отправляют на электронное устройство пользователя. Отправку сообщений указанным датчиком осуществляют периодически с постоянными интервалами времени при неизменном угле наклона объекта контроля или при изменении угла наклона в пределах заданного максимального значения. При изменении угла наклона более заданного максимального значения осуществляют немедленную передачу сообщений с меньшими интервалами времени, по которым пользователь судит об изменении угла наклона более заданного максимального значения. Достигается автоматизация процесса удаленного мониторинга за углом наклона объекта контроля. 5 з.п. ф-лы, 1 ил.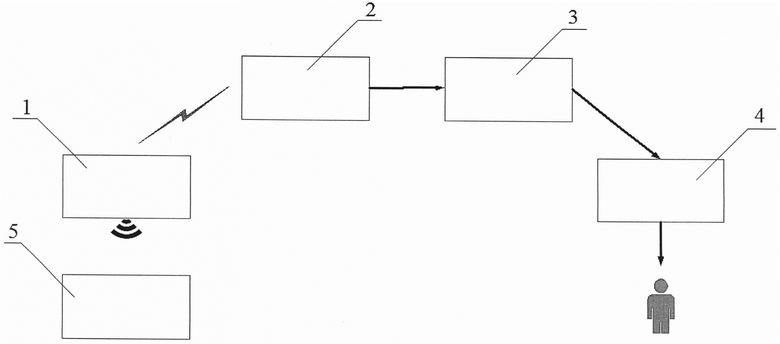
1. Способ мониторинга угла наклона объекта контроля, заключающийся в том, что на объекте контроля устанавливают беспроводной датчик угла наклона, с помощью которого с использованием LPWAN или NBIoT технологии периодически отправляют сообщения на по меньшей мере одну базовую станцию, установленную в зоне распространения радиосигнала указанного датчика, причем каждое сообщение от указанного датчика содержит идентификационные данные указанного датчика и текущее значение угла наклона объекта контроля, с помощью по меньшей мере одной базовой станции принимают от указанного датчика каждое сообщение, обрабатывают его и отправляют на сетевой сервер, с помощью сетевого сервера принимают от по меньшей мере одной базовой станции каждое сообщение, обрабатывают его и отправляют на электронное устройство пользователя, причем отправку сообщений указанным датчиком осуществляют периодически с постоянными интервалами времени при неизменном угле наклона объекта контроля или при изменении угла наклона в пределах заданного максимального значения, а при изменении угла наклона более заданного максимального значения осуществляют немедленную передачу сообщений с меньшими интервалами времени, по которым пользователь судит об изменении угла наклона более заданного максимального значения.
2. Способ по п. 1, в котором при принятии по меньшей мере одной базовой станцией сообщений от указанного датчика на ней осуществляют фильтрацию принятых сообщений путем отбрасывания искаженных и/или ложных сообщений.
3. Способ по п. 1, в котором при принятии сетевым сервером от по меньшей мере одной базовой станции сообщений на нем осуществляют фильтрацию принятых сообщений путем отбрасывания искаженных и/или ложных сообщений и осуществляют агрегацию принятых сообщений путем объединения в одно сообщение одного и того же сообщения, принятого разными базовыми станциями.
4. Способ по п. 1, в котором до начала отправки сообщений на по меньшей мере одну базовую станцию осуществляют настройку периодичности отправки сообщений.
5. Способ по п. 1, в котором электронное устройство пользователя имеет программное обеспечение, при этом осуществляют настройку сетевого сервера для этого программного обеспечения путем внесения идентификационных данных указанного датчика в базу данных сетевого сервера и ассоциации с программным обеспечением электронного устройства пользователя, а сетевой сервер осуществляет хранение полученных от по меньшей мере одной базовой станции сообщений, а также значений угла наклона и осуществляет определение программного обеспечения электронного устройства пользователя, с которым ассоциирован указанный датчик.
6. Способ по п. 1, в котором указанный датчик выполнен бесконтактным и включает корпус, трехосевой акселерометр, процессор управления с программным обеспечением, радиомодем, элемент питания, антенну и выключатель.
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| CN 207487656 U, 12.06.2018 | |||
| CN 108600367 A, 28.09.2018 | |||
| CN 108551469 A, 18.09.2018 | |||
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |

