Изобретение относится к области коммунального хозяйства, в частности к автоматизации учета объемов собранного или вывезенного мусора и к дистанционному мониторингу уровня наполненности мусорных контейнеров (баков), и может быть использовано для автоматизации процесса учета и расчета объемов вывозимого мусора, планирования и организации вывоза мусора и для контроля за своевременным опорожнением мусорных контейнеров.
Из уровня техники известен способ измерения объема заполнения мусорного бака, который реализуется в известном контейнером шкафе. Согласно данному способу на верхней внутренней стенке контейнерного шкафа устанавливают ультразвуковой датчик измерения объема заполнения мусорного бака, а внутри контейнерного шкафа устанавливают контролирующее устройство, содержащее контроллер. С помощью ультразвукового датчика измеряют объем заполнения мусорного бака, установленного внутри контейнерного шкафа, и передают данные от ультразвукового датчика на контролирующее устройство. С помощью контроллера обрабатывают сигналы от ультразвукового датчика и передают их с помощью GSM модуля на приложение мобильного устройства или диспетчерский пункт, после чего производят опустошение контейнера (см. патент RU 196833, опубликован 17.03.2020).
Недостатком известного решения является то, что датчик измерения объема заполнения мусорного контейнера устанавливают на верхней внутренней стенке контейнерного шкафа, что может вызвать при смещении внутри шкафа мусорного бака искажение измерения и неточность определения заполнения мусорного бака. Кроме того, если мусорный бак внутри шкафа будет иметь крышку, которая будет закрывать мусорный бак, то измерение объема заполнения мусорного бака будет невозможным. В связи с тем, что датчик стационарно установлен на внешней относительно мусорного бака конструкции, необходимо постоянно обеспечивать центровку мусорного бака и его установку на то же самое место, например, после вывоза мусора, что в противном случае может вызвать неточность определения заполнения мусорного бака.
Из уровня техники известен способ автоматизированного беспроводного мониторинга степени наполнения мусорного контейнера, заключающийся в том, что внутри контейнера (бака) устанавливают беспроводной ультразвуковой датчик наполнения. Датчик определяет наполненность контейнеров и по мобильной связи отправляют данные на обработку. Информацию передают на серверы и программное обеспечение, обрабатывающие информацию от сенсоров и на основании сохраняющейся статистики делают предсказания относительно периода заполнения мусорных контейнеров. С помощью вэб сайта пользователи получают информацию о заполненности контейнеров (см., например, сайты в Интернет http://wastetruck.ru/enevo/, https://www.ecubelabs.com/ru/, http://coolidea.ru/2013/06/30/vyivoz-musora-tolko-iz-polnyih-konteynerov/).
Недостатком такого способа является то, что ультразвуковые датчики осуществляют измерение расстояния в одной точке от точки излучения до ближайшего объекта в контейнере. При установке датчика для измерения расстояния в горизонтальной плоскости, по мере заполнения бака осуществляется определение верхней части кучи мусора за счет измерения расстояния. Учитывая различные свойства мусора и отходов, невозможно определить объем нижерасположенного мусора по данным о высоте кучи мусора. Возможным способом определения объема мусора в баке является измерение расстояния до верхней части кучи мусора в вертикальной плоскости. Для этого требуется установка датчика над баком на фиксированной высоте. В реальных условиях эксплуатации такое затруднительно ввиду того, что обычно баки не имеют крышек. При наличии крышки с установленным датчиком, открывание и ее закрывание или же постоянное ее открытое положение может привести к ложным результатам измерения расстояния. Кроме того, расположенный внутри контейнера датчик мешает выгрузке отходов, быстро загрязняется, подвержен механическим повреждениям при выгрузке отходов.
Также из уровня техники известен способ автоматизированного беспроводного мониторинга наполнения мусорного контейнера, заключающийся в том, что в мусорный контейнер (бак) устанавливают оптическое устройство контроля заполненности контейнера. Информацию о процентной наполненности контейнера передают в систему мониторинга по сети NB-IoT через настраиваемые интервалы времени. Основываясь на статистических данных, система рассчитывает примерные сроки наполнения мусорных контейнеров, определяет оптимальное число и расположение контейнеров (см., например, сайты в Интернет https://www.mos.ru/news/item/56951073/, http://www.mskit.ru/news/n213702/).
Недостатком такого способа является то, что оптические системы осуществляют измерение расстояния в одной точке от точки излучения до ближайшего объекта в контейнере. Учитывая, что контейнеры имеют различные размеры (наиболее распространённые контейнеры имеет размеры более 130×100 см), а твердые бытовые отходы имеют разную форму и размещаются в контейнер хаотично, задачу определения наполнения контейнера по измерению расстояния в одной точке решается не полноценно. Размещение устройства непосредственно в контейнере повышает вероятность повреждения датчика (и его оптических элементов) твердыми отходами и что наиболее важно ведет к загрязнению оптических элементов датчика, что в свою очередь приводит к необходимости проведения обслуживания датчика.
Наиболее близким к предложенному решению является способ обслуживания мусорного контейнера, включающий установку датчиков, определение факта заполнения контейнера, определение температуры в контейнере, передачу данных на удаленный компьютер. Датчик заполнения устанавливают на боковую стенку контейнера у верхнего края с его внутренней стороны, проводят инициализацию датчика заполнения, определяют эталонное расстояние до противоположной стенки контейнера. Фиксируют момент начала заполнения, проводят периодическое измерение расстояния до противоположной стенки контейнера, фиксируют момент, когда расстояние до противоположной стенки становится менее половины эталонного расстояния. Передают информацию о моменте наполнения контейнера. Продолжают периодическое измерение расстояния до противоположной стенки контейнера, фиксируют момент, когда расстояние до противоположной стенки становится равным эталонному расстоянию. Передают информацию об опорожнении контейнера на удаленный компьютер. Проводят периодические измерения температуры внутри контейнера, передают информацию о температуре на удаленный компьютер, далее повторяют измерения расстояния, температуры и передачу информации на удаленный компьютер не менее месяца с момента инициализации датчика заполнения. На основании переданной информации определяют скорость заполнения контейнера расчетным путем (см. Патент RU 2649150, опубликован 30.03.2018 г.).
Ключевым недостатком наиболее близкого решения является то, что описанный в изобретении способ основан на применении ультразвуковых датчиков, у которых присутствует «мертвая зона» вблизи сенсора, внутри которой расстояния не измеряются. В датчиках применяется 2G/3G/4G модемы, что требует относительно высокого энергопотребления для передачи данных, что в свою очередь требует наличия емкого источника питания. На практике это приводит к использованию относительно больших корпусов для датчиков: 15-20 см в длину и 5-10 см в ширину. Установка датчика такого объема на внутренней стороне контейнера является главным и основным недостатком способа. Такой датчик может быть поврежден при опорожнении контейнера, создаются условия для прикрепления мусора к датчику и др.
Технической проблемой, решаемой изобретением, является устранение вышеперечисленных недостатков, связанных с проблемой размещения датчика определения объема на внутренней стенке или над баком, а также возможность автоматизированного контроля объема сбора и вывоза мусора.
Техническим результатом изобретения является обеспечение возможности мониторинга степени наполнения мусорного контейнера и объема мусора в контейнере, повышение точности и надежности мониторинга степени наполнения мусорных контейнеров и их очистки, а также повышение информативности и достоверности информации об объеме собранного и вывезенного мусора в контейнерах, обеспечение возможности своевременного обнаружения наполнения и очистки мусорных контейнеров, обеспечение возможности удаленного автоматизированного мониторинга степени наполнения и очистки мусорных контейнеров, обеспечение возможности долгосрочной работы без повреждения измерительных датчиков за счет исключения больших выступающих частей датчиков внутри контейнера.
Технический результат изобретения достигается благодаря осуществлению способа мониторинга степени наполнения и очистки мусорного контейнера, заключающегося в установке на стенке контейнера у его верхнего края по меньшей мере одного устройства мониторинга уровня мусора, измерении степени наполнения контейнера и передачи информации о степени наполнения контейнера в программное обеспечение пользователя, при этом осуществляют установку по меньшей мере одного устройства мониторинга уровня мусора, включающего устройство перенаправления излучения, а также корпус, внутри которого размещены управляющий процессор и соединенные с ним радиопередающее устройство, измеритель расстояния и элемент питания, при этом корпус устанавливают с наружной стороны по меньшей мере одной стенки контейнера, а устройство перенаправления устанавливают с внутренней стороны указанной по меньшей мере одной стенки контейнера напротив измерителя расстояния, с помощью измерителя расстояния излучают измерительный сигнал, который с помощью устройства перенаправления излучения направляют сверху вниз под углом к дну контейнера, отличным от прямого, и регистрируют отраженный измерительный сигнал с помощью измерителя расстояния, сигнал с измерителя расстояния, содержащий значение измеренного расстояния, подают на управляющий процессор и с помощью радиопередающего устройства в соответствии с тактикой отправляют сообщения с помощью сети связи в программное обеспечение пользователя, причем каждое сообщение содержит идентификационные данные по меньшей мере одного устройства мониторинга уровня мусора и значение измеренного расстояния, а в программном обеспечении пользователя при принятии сообщений на основании значения измеренного расстояния определяют степень наполнения мусорного контейнера.
Кроме того, могут использовать измеритель расстояния с СВЧ или ИК, или УЗ датчиком, а в качестве устройства перенаправления излучения могут использовать зеркало или призму, установленную в корпусе с прозрачными для используемого излучения стенками.
Причем могут использовать устройство перенаправления излучения, выполненное с возможностью изменения угла направления измерительного сигнала.
Отправку сообщений радиопередающим устройством могут осуществлять с использованием LPWAN или NBIoT, или 2G, или 3G, или 4G, или 5G технологии.
Кроме того, до начала отправки сообщений в приложение пользователя на по меньшей мере одном устройстве мониторинга уровня мусора могут осуществлять настройку тактики отправки сообщений.
Кроме того, до начала излучения измерительного сигнала могут осуществлять настройку сети связи и программного обеспечения пользователя путем внесения идентификационных данных по меньшей мере одного устройства мониторинга уровня мусора в связанную с программным обеспечением пользователя базу данных и ассоциации по меньшей мере одного устройства мониторинга уровня мусора с программным обеспечением пользователя, при этом программное обеспечение пользователя может осуществлять хранение полученных от по меньшей мере одного устройства мониторинга уровня мусора сообщений и ассоциацию с по меньшей мере одним устройством мониторинга уровня мусора.
Кроме того, при принятии программным обеспечением пользователя сообщений от по меньшей мере одного устройства мониторинга уровня мусора, программное обеспечение пользователя может осуществлять перерасчет измеренного расстояния в объем мусора в контейнере.
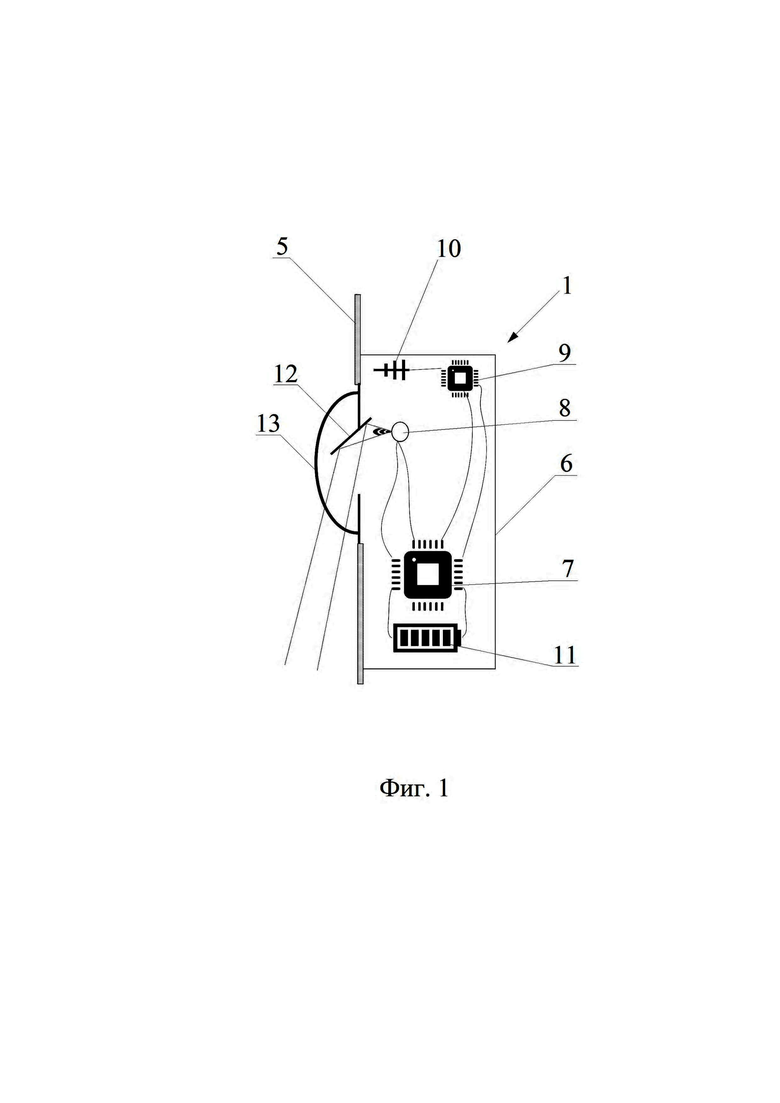
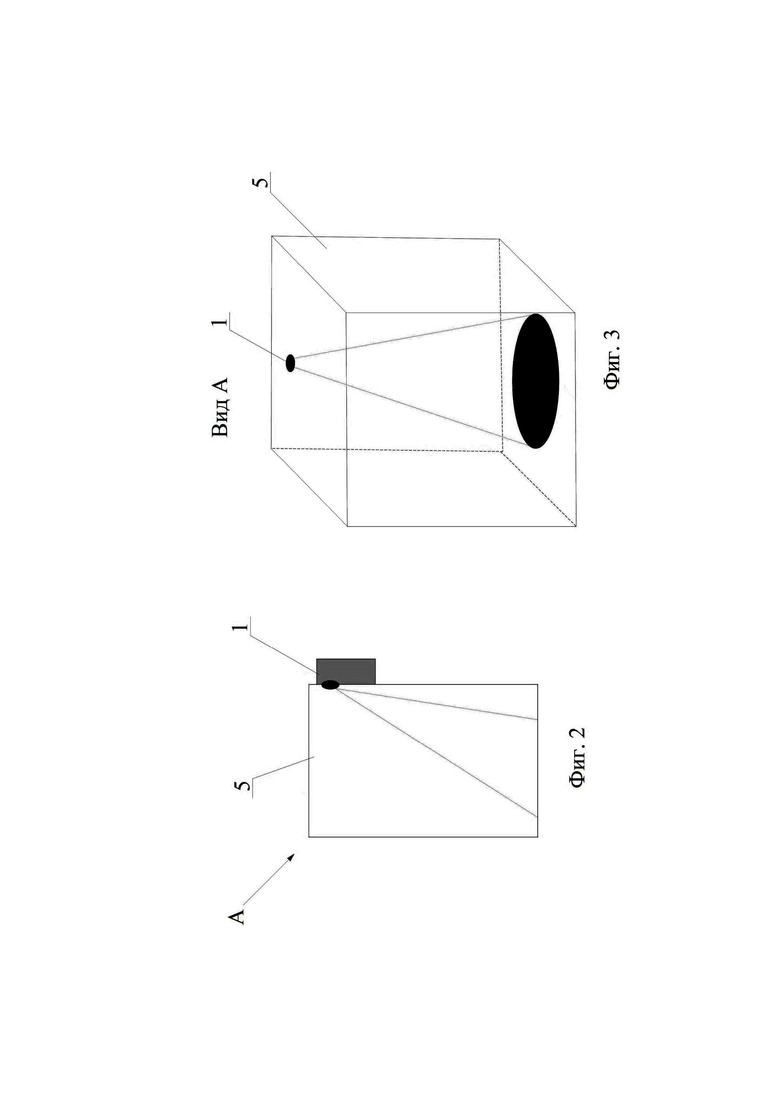
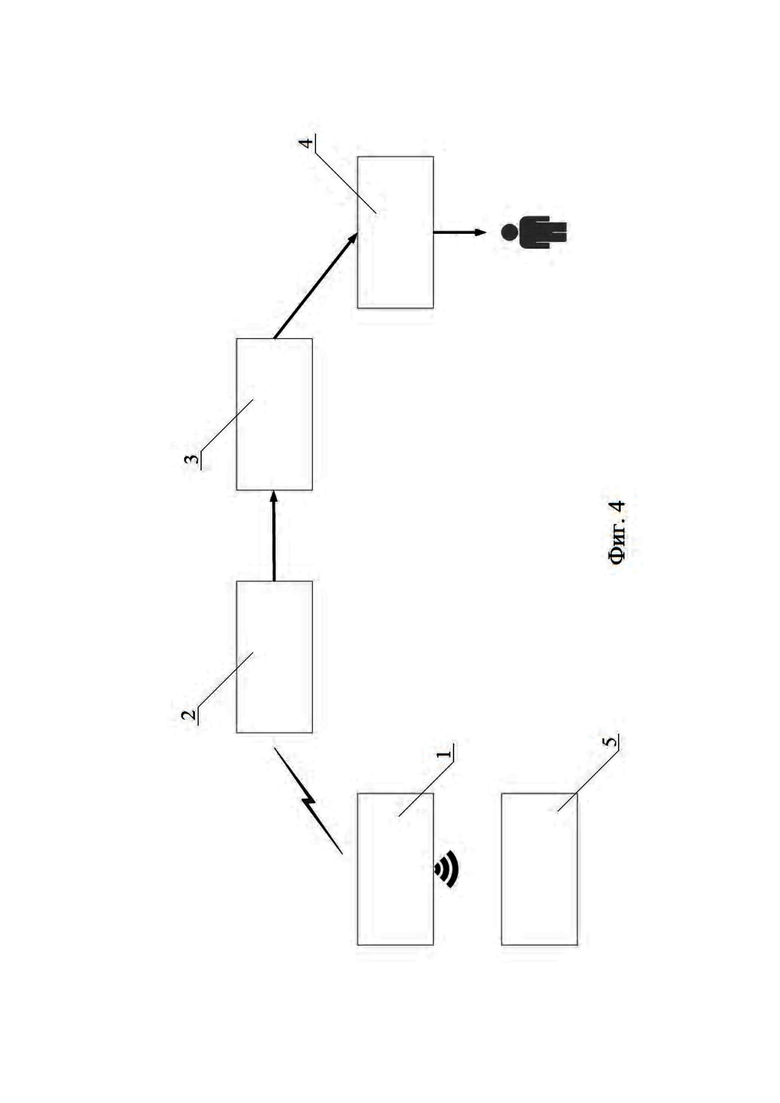
Изобретение поясняется с помощью чертежей, где на фиг. 1 показана схема компонентов устройства, с помощью которого осуществляется мониторинг степени наполнения мусорного контейнера; на фиг. 2 показан пример установки устройства на мусорном контейнере, вид сбоку; на фиг. 3 показан пример установки устройства на мусорном контейнере, вид А на фиг. 2 (вид в аксонометрии); на фиг. 4 схематично показана связь элементов, с помощью которых осуществляется предложенный способ.
Предложенный способ предназначен для автоматизированного измерения степени наполненности мусорных контейнеров с бытовыми мусорными отходами, для автоматизации учета объема накопленного или вывезенного мусора благодаря измерению расстояния от верхнего края мусорного контейнера до верхних выступающих точек мусора в мусорном контейнере.
Предложенный способ реализуется с помощью совокупности технических средств, связанных между собой беспроводными каналами связи и включающих в себя (но, не ограничиваясь): устройство 1 мониторинга уровня мусора; базовую станцию 2 (сетевой шлюз, при необходимости); сеть 3 связи (сеть передачи данных с оконечными устройствами, связанными каналами связи); специальное программное обеспечение 4 пользователя (приложение пользователя, сервис). При этом программное обеспечение 4 пользователя может быть реализовано либо на любом электронном устройстве конечного пользователя (телефон, смартфон, планшет, ноутбук, персональный компьютер или иное устройство), с помощью которого пользователь осуществляет мониторинг степени (уровня) наполнения мусорного контейнера; либо может быть реализовано на любом внешнем сервере (серверах) обработки информации (данных), причем такой сервер может быть частью программного обеспечения пользователя; либо может быть реализовано на любых других средствах обработки информации.
Устройство 1 для мониторинга уровня мусора представляет собой специальный датчик, с помощью которого измеряется расстояние от верхнего края мусорного контейнера 5 до выступающих верхних точек мусора в мусорном контейнере 5, и с помощью которого обеспечивается информирование пользователя о степени наполнения контейнера 5. Устройство 1 имеет, преимущественно, две части (основной блок и переотражатель), которые могут быть соединены друг с другом и выполнены в виде единого цельного устройства, либо которые могут быть съемными (конструктивно независимыми) друг относительно друга. При этом первая часть устройства 1 предназначена для закрепления на внешней стороне стенки мусорного контейнера 5, а вторая часть предназначена для закрепления на внутренней стороне этой же стенки мусорного контейнера 5 напротив первой части.
Первая часть устройства 1 (основной блок) включает в себя корпус 6, внутри которого расположены: управляющий процессор 7 (контроллер управления со специальным встроенным программным обеспечением), измеритель 8 расстояния, соединенный (связанный) с процессором 7, радиопередающее устройство, соединенное (связанное) с процессором 7 и включающее в себя сетевой модуль 9 (радиомодем) и соединенную с ним антенну 10, элемент 11 питания, соединенный (связанный) с процессором 7, с измерителем 8 расстояния и с радиопередающим устройством. Управляющий процессор 7, измеритель 8 расстояния, радиопередающее устройство и элемент 11 питания могут быть расположены на единой печатной плате и выполнены конструктивно с ней, которая расположена в корпусе 6. Управляющий процессор 7 может быть конструктивно совмещен с сетевым модулем 9 (в виде единого блока, с которым соединены измеритель 8 расстояния и антенна 10).
Измеритель 8 расстояния может представлять собой датчик, основанный на СВЧ (сверхвысокочастотном электромагнитном) излучении или на ИК (инфракрасном) излучении, или на УЗ (ультразвуковом) излучении, или на лазерном (оптическом) излучении. Количество измерителей 8 расстояния в корпусе 6 (на печатной плате) может быть любым от одного и более (два, три, четыре или более, в зависимости от размера контейнера 5, на котором устанавливают устройство 1). При этом возможно использование либо одного вида измерителей 8, либо различное сочетание видов измерителей 8, расположенных в одном корпусе 6, если их количество более одного. Например, если количество измерителей 8 в одном корпусе 6 равно двум, то они могут быть либо оба СВЧ датчика, либо оба УЗ датчика, либо оба ИК датчика, либо оба лазерных датчика, либо один из измерителей 8 представляет собой ИК датчик, а второй - лазерный датчик, либо один из измерителей 8 представляет собой СВЧ датчик, а второй - УЗ датчик, и так далее возможны любые сочетания из всех возможных, в том числе, если количество измерителей 8 более двух в корпусе 6.
В случае, когда количество измерителей 8 расстояния более одного (два, три или более), то они расположены друг относительно друга на определенном расстоянии, определяемом исходя из размеров мусорных контейнеров 5 и разумной достаточности длины устройства 1, т.е. адекватного его размера (например, от 5 до 15 см., или на большем расстоянии, причем расстояние между одними соседними измерителями 8 может быть равно, больше или меньше, чем расстояние между другими соседними измерителями 8 в случае, когда их количество более двух).
Вторая часть устройства 1 (переотражатель) представляет собой устройство перенаправления излучения, которое включает в себя отражатель 12 излучения (световод 12), который расположен в прозрачном корпусе 13. Корпус 13 может иметь прозрачные для используемого типа излучения стенки, т.е. пропускающие любой тип излучения. Отражатель 12 может представлять собой зеркало или призму (или иной тип отражателя), установленный в прозрачном корпусе 13 (в случае использования СВЧ, ИК или УЗ датчиков). Также отражатель может представлять собой световод 12, установленный в прозрачном корпусе 13 (в случае использования лазерного датчика). Причем устройство перенаправления излучения может быть выполнено с возможностью изменения угла направления (отражения) измерительного сигнала от измерителя 8 расстояния, т.е. с возможностью поворота зеркала или призмы (линзы), или световода на любой необходимый угол. За счет этого обеспечивается возможность направлять измерительный сигнал в любую необходимую точку мусорного контейнера 5 от верхнего его края в сторону дна (в сторону противоположного угла) или в сторону противоположной стенки контейнера 5 по диагонали сверху вниз, или под любым углом к дну контейнера 5, отличным от прямого угла.
Количество устройств перенаправления излучения в устройстве 1 может быть от одного и более (два, три, четыре или более, в зависимости от размера контейнера 5, на котором устанавливают устройство 1, и в зависимости от количества измерителей 8 расстояния). Таким образом, в случае, если в корпусе 6 устройства 1 имеется один измеритель 8 расстояния, то устройство 1 включает одно устройство перенаправления излучения, а если количество измерителей 8 расстояния более одного в корпусе 6, то и количество устройств перенаправления также более одного (равное количеству измерителей 8) в устройстве 1.
Устройство перенаправления излучения в отличие от измерительного устройства (первой части устройства 1) имеет малые размеры, закругленные края, практически не выступает за поверхность (плоскость) стенки контейнера 5 и, поэтому, не мешает выгрузке мусора и слабо подвержено механическим воздействиям при заполнении и выгрузке контейнера 5.
Процессор 7 осуществляет управление измерителем 8 расстояния, в том числе задает периодичность отправки (излучения) измерительных сигналов, осуществляет анализ и обработку данных, полученных от измерителя 8 расстояния, передачу сообщений (данных, информации) в радиопередающее устройство, хранение настроек периодичности отправки сообщений (сигналов) радиопередающим устройством.
Сетевой модуль 9 радиопередающего устройства обеспечивает передачу сообщений (сигналов) в сети передачи данных посредством антенны 10, а также хранение необходимых параметров для работы в соответствующей сети передачи данных.
Антенна 10 предназначена для обеспечения передачи сообщений (сигналов) в радиоканал (сотовую сеть).
Причем в случае передачи сообщений с использованием LPWAN технологии, то сетевой модуль 9 представляет собой радиомодуль, который передает данные по LPWAN каналу; в случае передачи сообщений с использованием NBIoT технологии, то сетевой модуль 9 представляет собой NBIoT модуль; а в случае передачи сообщений с использованием 2G/3G/4G или 5G технологии, то сетевой модуль 9 представляет собой модем сотовой связи и для передачи данных используется соответствующий протокол сотовой сети передачи данных.
Элемент 10 питания предназначен для обеспечения автономности работы устройства 1, т.е. установленных в корпусе 6 компонентов (процессора 7, измерителя 8 и сетевого модуля 9).
Корпус 6 устройства 1 может быть выполнен в виде полой трубки или в виде короба, преимущественно, прямоугольной (квадратной) формы поперечного сечения (или любой иной формы), или в виде цилиндра и т.п. Корпус 6 имеет необходимую длину, которая зависит от размера контейнера 5, на котором устанавливается устройство 1, и от размера печатной платы, которая неподвижно расположена внутри корпуса 6. Причем корпус 6 может иметь один открытый конец и один закрытый конец, либо может иметь оба открытых конца, на которых установлены съемные крышки, позволяющие обеспечить доступ вовнутрь корпуса 6 к компонентам, установленным в корпусе 6.
Корпус 6 может иметь отверстие (отверстия) в зоне расположения измерителя 8 расстояния (измерителей 8), которое позволяет пропускать измерительные сигналы от измерителя 8 на отражатель 12 излучения. В случае если обе части устройства 1 конструктивно соединены друг с другом, то корпус 6 может иметь прозрачную вставку (количество вставок равно соответственно количеству отражателей (световодов) 12 и количеству измерителей 8), которая и образует корпус 13 отражателя 12 излучения, в котором герметично расположен соответствующий отражатель (световод) 12.
Корпус 6 устройства 1 предназначен для установки либо непосредственно на наружной стороне стенки контейнера 5; либо в специальной цапфе, которая является накладным элементом на внешние стенки контейнера 5, и которая имеет специальные зацепы, за которые мусоросборочная машина поднимает и опрокидывает контейнер 5; либо для установки в иных технологических проемах контейнера 5. Также при наличии специальных технологических проемов или указанной цапфы, устройство 1 может не иметь корпус 6, а плата устанавливается (размещается) в этих технологических проемах или в проемах цапфы. Корпус 6 может иметь элемент крепления, предназначенный для соединения со стенкой контейнера 5.
Устройство 1 связано (соединено) посредством беспроводных каналов связи с базовой станцией 2 (или с несколькими базовыми станциями 2) и обеспечивает передачу на базовую станцию 2 сообщений, содержащих данные об измеренном расстоянии внутри мусорного контейнера 5 от верхнего края до уровня мусора в контейнере 5.
Способ автоматизированного беспроводного мониторинга степени наполнения мусорного контейнера 5 заключается в следующем.
Для реализации предложенного способа важным является размещение устройства 1 на мусорном контейнере 5 и обеспечение конфигурирования сети 3 связи таким образом, чтобы обеспечивалась доставка сообщений от устройства 1 до программного обеспечения 4 (приложения) конечного пользователя. Для этого осуществляют настройку сети 3 связи и настройку программного обеспечения 4 пользователя. На данном этапе уникальные идентификаторы (идентификационные данные) устройства 1 вносятся в базу данных, которая связана с программным обеспечением 4. Уникальным идентификатором устройства 1 является, например, сетевой адрес или идентификационный номер устройства 1 (ID) или ICCID, или иное (определяется применяемой технологией передачи данных LPWAN или NBIoT, или 2G/3G/4G/5G). Также на данном этапе осуществляется ассоциация устройства 1 с программным обеспечением 4 пользователя.
Устройство 1 устанавливают следующим образом. С верхней (открытой) части контейнера 5 на наружной стороне одной или нескольких стенок мусорного контейнера 5, степень наполнения которого необходимо контролировать, устанавливают (закрепляют) корпус 6 устройства 1, а на внутренней стороне этой же стенки (стенок) напротив измерителя 8 расстояния устанавливают устройство перенаправления излучения. Возможен вариант, когда на одной стенке (либо на нескольких стенках) устанавливают либо одно устройство 1 с одним измерителем 8 расстояния, либо несколько устройств 1 с одним измерителем 8 расстояния. Также возможен вариант, когда устанавливают либо одно устройство 1 с несколькими измерителями 8 расстояния, либо несколько устройств 1 с несколькими измерителями 8 расстояния. Также возможен вариант, когда устанавливают несколько устройств 1, часть из которых с одним измерителем 8 расстояния, а часть с несколькими измерителями 8 расстояния. Причем тип измерителей 8 расстояния в любом из установленных устройств 1 может быть любым из вышеуказанных, в том числе различное их сочетание.
В случае если обе части устройства 1 выполнены заодно целое, то в отверстие (отверстия) стенки (стенок) контейнера 5 пропускают устройство перенаправления так, что корпус 6 расположен с наружной стороны стенки контейнера 5, а корпус 13 расположен с внутренней стороны стенки контейнера 5 (незначительно выступая за внутреннюю плоскость стенки).
При установке устройства 1 на стенке (стенках) контейнера 5 осуществляют настройку (регулировку) угла наклона отражателя 12 излучения с целью обеспечения направления измерительного сигнала в нужную сторону (например, по диагонали сверху вниз) под необходимым углом к дну контейнера 5 (или к соответствующей стенке контейнера 5).
Перед установкой устройства 1 на контейнере 5 проводят следующее: а) определение оптимального исполнения устройства 1; б) подготовка устройства 1 к работе в соответствии с рекомендациями производителя, в том числе настройка периодичности отправки сообщений; в) подготовка (образование) специальных отверстий в стенках контейнера 5 для сообщения измерителей 8 расстояния с отражателями 12 и размещение устройства 1 на контейнере 5; г) измерение расстояния (в том числе с помощью устройства 1) при пустом мусорном контейнере 5 от верхнего края контейнера 5 до его дна под заранее определенным углом к дну. Для установки устройства 1 на контейнере 5 может потребоваться подготовка крепежа и/или подготовка самого контейнера 5, в том числе путем образования специальных отверстий и установки в них корпусов 13 устройств перенаправления излучения. При этом отсутствуют существенные ограничения на место установки (крепежа) устройства 1. Методы крепежа устройства 1 не ограничены и могут быть любыми.
В преимущественном варианте при установке устройства 1 на контейнере 5, в стенке контейнера 5 необходимо выполнить отверстие в месте соединения первой и второй части устройства 1 (основного блока и переотражателя). В случае если осуществляют мониторинг степени наполнения контейнера 5 (мусорного бака) с пластиковыми стенками, то при установке датчика, имеющего измеритель 8 с СВЧ излучением, необходимости в выполнении отверстия в стенке может не быть, т.к. СВЧ излучение имеет малое затухание в пластмассе и позволяет проводить измерение непосредственно через стенку контейнера 5.
После того, как устройство 1 установлено на стенке (стенках) контейнера 5 и настроено (в том числе определили максимальное расстояние при пустом контейнере 5 под необходимым углом к его дну), осуществляют непосредственный мониторинг степени наполнения мусорного контейнера 5.
Размещенное на стенке (стенках) контейнера 5 устройство 1 осуществляет непрерывное автоматизированное измерение расстояния от верхней открытой части контейнера 5 до уровня мусора (до выступающих его точек), находящегося в мусорном контейнере 5.
В процессе мониторинга каждый измеритель 8 расстояния периодически и часто излучает измерительный сигнал, который с помощью устройства перенаправления излучения, а именно с помощью отражателя излучения 12 (зеркала, призмы), направляют сверху вниз под необходимым заранее настроенным углом к дну контейнера 5, который отличен от прямого угла (преимущественно, по диагонали от верхнего края одной стенки до нижнего края (угла) противоположной стенки). Отраженный от выступающих точек внутри контейнера 5 измерительный сигнал (от дна или стенок, если контейнер пустой, или от выступающих точек уровня мусора, если в контейнере 5 имеется мусор) возвращается через устройство перенаправления обратно на измеритель 8 расстояния. Измеритель 8 расстояния регистрирует отраженный измерительный сигнал и определяет значение расстояния, пройденного измерительным сигналом от отражателя 12 до соответствующего уровня мусора в контейнере 5 (или стенок, дна контейнера 5, если он пустой). Далее сигнал, содержащий значение измеренного расстояния подают от измерителя 8 на управляющий процессор 7, на котором он обрабатывается и в соответствии с заранее определенной тактикой работы подается от процессора 7 на радиопередающее устройство (на сетевой модуль 9). Тактика работы подразумевает определенные алгоритмы отправки сигнала (сообщений), в том числе расписание излучения и отправки сигнала, периодичность отправки, время, в течение которого он передается и так далее.
Период между излучением измерительного сигнала настраивается пользователем и может быть равен любому необходимому промежутку времени. Измерители 8 расстояния периодически включаются для излучения измерительного сигнала и его обратного приема. Процессор 7 также периодически включается на прием от измерителя 8 измеренного расстояния и на отправку сигнала со значением расстояния на радиопередающее устройство.
Каждое излучение от измерителя 8 имеет определенную модуляцию. Это сделано для защиты от улавливания излучения пультов дистанционного управления и прочих посторонних источников соответствующих сигналов. Возможны переотражения от стенок контейнера 5, но они частичные. Для определения степени наполнения контейнера 5 (уровня мусора в контейнере 5) по значению расстояния, пройденного измерительным сигналом, осуществляют сравнение и вычитание измеренного расстояния в текущий момент из максимального расстояния, которое было измерено при настройке.
Таким образом, по разнице расстояний, управляющий процессор 7 определяет уровень мусора в контейнере 5 и степень его наполнения. Исходя из степени наполненности контейнера 5, измеритель 8 расстояния может включаться реже. Например, если контейнер 5 длительное время находится пустым, то измеритель 8 расстояния по команде управляющего процессора 7 с целью экономии энергии может не включаться в течение относительно долгого времени (например, 20-60 минут или другое время).
При полном мусорном контейнере 5 измерительный сигнал проходит минимальное расстояние, информация о чем (в короткие промежутки времени) поступает на процессор 7, а с процессора 7 на радиопередающее устройство.
В процессе мониторинга степени наполнения контейнера 5 устройство 1 с помощью радиопередающего устройства (сетевого модуля 9 и антенны 10) периодически отправляет по радиоканалу сообщения со значением измеренного расстояния, пройденного измерительным сигналом внутри контейнера 5.
Устройство 1 передает сообщения, каждое из которых содержит значение измеренного расстояния внутри контейнера 5 и идентификационные данные устройства 1. Сообщения передаются в соответствии с настраиваемой пользователем тактикой работы. Например, один раз в два часа (или любое иное настраиваемое время). Такие сообщения могут использоваться также для контроля работоспособности устройства 1 и канала связи.
При получении процессором 7 сигнала со значением измеренного расстояния существенно меньшим, чем при пустом контейнере 5, сообщения могут передаваться вне расписания и сразу после получения сигнала со значением пройденного расстояния, например, менее половины расстояния, измеренного при пустом контейнере 5 (периодичность отправки таких сообщений также настраивается пользователем). Для минимизации риска недоставки сообщения по радиоканалу, такое сообщение может быть отправлено несколько раз подряд (например, 3-5 раз). Отправляемые радиопередающим устройством сообщения также могут использоваться для передачи приложению 4 пользователя информации о факте работоспособности самого устройства 1 и радиоканала до базовой станции 2. Тактика отправки таких сообщений настраивается пользователем в зависимости от условий эксплуатации и контролируемого объекта (контейнера 5), в том числе от места расположения контейнера 5.
Отправка сообщений осуществляется с помощью радиопередающего устройства (сетевого модуля 9 и антенны 10) с использованием LPWAN технологии или с использованием NBIoT технологии, или с использованием 2G/3G/4G/5G технологии (в зависимости от наличия зоны покрытия в месте установки устройства 1, дальности передачи сигнала от радиопередающего устройства и пр.). Сообщения отправляют либо сначала на базовую станцию 2 (или на несколько базовых станций 2), установленную в зоне распространения радиосигнала сетевого модуля 9, либо непосредственно в программное обеспечение 4 пользователя. Причем до начала отправки сообщений на базовую станцию 2, на устройстве 1 (на процессоре 7) может быть осуществлена настройка тактики отправки сообщений. Настройка тактики отправки может осуществляться для сообщений с различным значением измеренного расстояния. При этом для сообщений с максимальным значением расстояния, пройденного измерительным сигналом, интервалы времени отправки могут быть больше; для сообщений, например, со средним значением расстояния, пройденного измерительным сигналом, интервалы времени отправки могут быть меньше, чем для сообщений с максимальным значением расстояния; а при минимальном расстоянии, пройденном измерительным сигналом, сообщения могу отправлять с еще меньшим интервалом времени, чем для сообщений со средним значением расстояния, по которым пользователь судит о степени наполнения контейнера 5.
За счет того, что каждое сообщение от устройства 1 содержит идентификационные данные беспроводного устройства 1 и значение расстояния, пройденного измерительным сигналом, пользователь в любой момент может узнать уровень мусора в контейнере 5 (степень наполнения контейнера 5) и место расположения такого контейнера 5.
Сообщения отправляют периодически с интервалами времени, которые задаются пользователем. При этом пользователь в зависимости от задачи контроля, от условий эксплуатации, от своих потребностей и от места, где установлен контейнер 5 с устройством 1, может настроить любые интервалы времени для отправки сообщений (через несколько секунд или через несколько минут, или через каждый час, или один раз в день в определенное время, или один раз месяц в определенное время соответствующего дня и так далее). В случае, когда значение расстояния, пройденного измерительным сигналом, существенно меньше первоначально определенного при пустом контейнере 5, может автоматически осуществляться немедленная (моментальная) внеочередная передача сообщений вне установленного пользователем расписания.
После получения сообщений программным обеспечением 4 (приложением) пользователя и после их обработки, пользователь может быть уведомлен о степени наполнения мусорного контейнера 5.
Для отправки устройством 1 сообщений (радиосигналов) используется LPWAN технология или NBIoT технология, или 2G/3G/4G/5G технология, причем протокол передачи данных (сотовой сети) определяется применяемой в конкретном случае технологией. Частотный диапазон зависит от применяемой в конкретном случае технологии и действующих в конкретном регионе правил и разрешений.
Для приема сообщений от устройства 1 в зоне распространения радиосигнала радиопередающего устройства (сетевого модема 9 с антенной 10) может присутствовать по меньшей мере одна базовая станция 2 (сетевой шлюз). Однако может быть и большее количество базовых станций 2, причем для приема сообщения от устройства 1 могут использоваться уже заранее установленные базовые станции 2, либо при их отсутствии в зоне распространения сигнала от датчика 1 устанавливают базовую станцию 2 (или несколько базовых станций 2).
После отправки устройством 1 сообщений, с помощью базовой станции 2 (или нескольких базовых станций 2) принимают от устройства 1 каждое сообщение, обрабатывают его и отправляют его в сеть 3 связи.
Базовая станция 2 (базовые станции, при их наличии при осуществлении способа) осуществляет передачу (отправку) принятых из радиоканала сообщений в сеть 3 связи немедленно после их получения из радиоэфира от устройства 1. Способ передачи данных базовой станцией 2 в сеть 3 связи определяется конкретной моделью базовой станции 2.
После принятия сетью 3 связи каждого сообщения от базовой станции 2 (станций), осуществляется передача каждого такого принятого сообщения с помощью данной сети 3 связи в программное обеспечение 4 конечного пользователя (в том числе, например, на его электронное устройство). Таким образом базовая станция 2 перенаправляет с помощью сети 3 связи каждое сообщение от устройства 1 в программное обеспечение 4 пользователя. В программном обеспечении 4 пользователя при обработке сообщений также может происходить пересчет измеренного расстояния в объем мусора в контейнере 5 с учетом данных о типе (размере) контейнера 5, места его установки и т.п. Сообщения от устройства 1 могут быть направлены с помощью сети 3 связи в программное обеспечение 4 пользователя напрямую (без использования базовых станций 2).
При получении программным обеспечением 4 пользователя из сети 3 связи каждого обработанного сообщения осуществляются сопоставление идентификационных данных устройства 1 (соотнесение идентификатора датчика 1) с физическим объектом контроля, на котором установлено устройство 1, и осуществляют уведомление (информирование) пользователя. Информирование пользователя может быть осуществлено путем периодической отправки ему сообщений (через определенные периоды времени, настраиваемые пользователем), включающих идентификационные данные устройства 1 и значение расстояния, пройденного измерительным сигналом (а также значение пересчитанного объема мусора). При заполненном контейнере 5, когда значение измеренного расстояния минимальное, пользователя немедленно уведомляют путем отправки ему сообщения и путем воспроизведения определенного сигнала на устройстве 4. При опорожнении контейнера 5 пользователя уведомляют путем отправки ему сообщения, включающего идентификационные данные устройства 1 и максимальное значение расстояния, пройденного измерительным сигналом (данное сообщение может отправляться немедленно и с меньшими интервалами времени в течение определенного времени). Таким образом, при очистке контейнера 5 пользователя уведомляют об этом с помощью его программного обеспечения 4 путем воспроизведения определенного сигнала.
Метод информирования (уведомления) пользователя может быть любым, например, путем подачи тревожного сигнала на его устройстве с приложением 4, или путем световой индикации, или вибрации его устройства, или любым иным возможным способом, в том числе комбинацией указанных методов. Причем приложение 4 пользователя может отображать, например, карту расположения контейнеров 5 с устройствами 1 или список таких объектов, и пользователь имеет возможность в режиме реального времени, находясь на любом расстоянии от объекта мониторинга, проверить степень наполнения контейнера 5.
Таким образом, благодаря реализации предложенного способа обеспечивается непрерывный мониторинг степени наполнения мусорных контейнеров 5 в любых местах, где это необходимо осуществлять. Это обеспечивается за счет того, что устройство 1 периодически отправляет сообщения (со значением расстояния, пройденного измерительным сигналом) на базовую станцию 2, которая отправляет эти сообщения в сеть 3 связи, а далее отправляет сообщения в программное обеспечение 4 (приложение) пользователя. Сообщения при различном значении измеренного расстояния отправляются с необходимой для пользователя периодичностью с необходимыми для него интервалами времени, и пользователь в любое время может с помощью своего приложения 4 проверить работоспособность устройства 1 и радиоканал, а также степень наполнения контейнера 5. Если значение измеренного расстояния минимально, т.е. при заполненном контейнере 5, устройство 1 незамедлительно отправляет соответствующее сообщение также на базовую станцию 2, которая отправляет это сообщение в сеть 3 связи, а далее на приложение 4 пользователя. При получении приложением 4 пользователя такого сообщения, осуществляют уведомление пользователя о факте наполненности контейнера 5 путем подачи звукового сигнала в приложении 4 или путем световой индикации или любым иным возможным способом. При получении такого сообщения пользователь может незамедлительно отреагировать на этот факт и предпринять необходимые меры для оперативного его опорожнения. Как только контейнер 5 очистят (опустошат), устройство 1 незамедлительно отправляет сообщение с максимальным значением измеренного расстояния также на базовую станцию 2, которая отправляет это сообщение в сеть 3 связи, а далее сообщение отправляется в приложение 4 пользователя. При получении приложением 4 пользователя такого сообщения осуществляется уведомление пользователя о факте очистки контейнера 5 путем подачи звукового сигнала приложением 4 или путем световой индикации или любым иным возможным способом.
Благодаря использованию базовых станций 2 и сети связи 3 сообщения от устройства 1 могут быть переданы на любые расстояния, причем пользователь может находиться в любом месте и на любом расстоянии от устройства 1. В соответствии с общепринятой идеологией построения LPWAN сетей или NBIoT сетей, или 2G/3G/4G/5G сетей размещение базовых станций 2 (сетевых шлюзов) и обеспечение зоны радиопокрытия является задачей оператора связи.
Благодаря использованию устройства 1 вышеописанного исполнения, исключаются выступающие части на внутренней стороне стенки контейнера 5, что исключает возможность повреждения устройства 1 при наполнении контейнера 5 и его опорожнении, в результате чего существенно повышается надежность и долговечность мониторинга степени наполнения контейнера 5.
Кроме того, благодаря предложенному способу обеспечивается:
- удаленный автоматизированный контроль в режиме реального времени степени наполнения и опорожнения контейнеров 5 на базе устройства 1 с недорогими измерителями 8 расстояния путем определения расстояния, пройденного измерительным сигналом внутри контейнера 5;
- высокая точность контроля наполненности и опорожнения контейнера 5 за счет применения соответствующих датчиков и отражателей;
- применение бесконтактного способа контроля наполнения и очистки, а также отсутствие на внутренней стенке контейнера 5 сильно выступающих частей устройства 1, что позволяет сохранить устройство 1 в сохранности в течение всего срока эксплуатации, тем самым повысить надежность и долговечность работы;
- удаленный автоматизированный контроль без необходимости прокладки проводных коммуникаций;
- отсутствие необходимости обслуживания устройства 1 и долгая работа от одного элемента 11 питания (3-5 лет);
- размещение устройства 1 в технологических проемах мусорного контейнера 5 (контейнера) обеспечивает его защиту от повреждений при эксплуатации;
- низкая стоимость устройства 1 и совокупная стоимость владения системой за счет долгого срока работы устройства 1 и отсутствия необходимости обслуживания устройства 1;
- снижение стоимости на внедрение системы и малый срок внедрения, а также снижение стоимости на дальнейшую эксплуатацию.
Благодаря применению ИК, СВЧ, УЗ или оптических датчиков, образующих определенную зону для измерения расстояния, а также благодаря применению устройства перенаправления, способного направить измерительный сигнал в любое место под любым углом в контейнере 5, исключается необходимость применения подвижных механических частей и можно быстро настроить для любого типа контейнера 5 область, в которой будет измеряться расстояние до уровня мусора. Размещение устройства 1 на нескольких стенках контейнера 5, в том числе с различными типами измерителя 8 расстояния, позволяет максимально точно определить расстояние с разных сторон и степень наполнения контейнера 5, даже если контейнер 5 заполнен мусором неравномерно. Применение указанных измерителей 8 с устройствами перенаправления излучения позволяет контролировать мусорные баки любых размеров от десятков сантиметров до нескольких метров. Благодаря описанному принципу размещения устройства 1 на стенках контейнера 5, а также благодаря такой организации измерения расстояния от стенки контейнера 5 до мусора в нем, обеспечивается автоматизация учета объема накопленного или вывезенного мусора.
Архитектурное решение основано на общепринятой архитектуре IoT, в которой предусмотрено наличие сетевого шлюза, сервера обрабатывающего сообщения и передающего их приложению пользователя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматизированного беспроводного мониторинга наполнения и очистки мусорного контейнера и устройство для его осуществления | 2019 |
|
RU2722576C1 |
| Способ автоматизированного беспроводного мониторинга состояния мусорного контейнера | 2020 |
|
RU2739076C1 |
| Способ цифровой передачи данных об уровне наполненности контейнера отходами | 2022 |
|
RU2784725C1 |
| Способ автоматизированного беспроводного мониторинга уровня жидкости и устройство для его осуществления | 2019 |
|
RU2722862C1 |
| СИСТЕМА ДИСТАНЦИОННОГО КОНТРОЛЯ ЗА МУСОРНЫМИ КОНТЕЙНЕРАМИ | 2021 |
|
RU2767003C1 |
| Способ контроля эксплуатации мусорного контейнера | 2017 |
|
RU2649150C1 |
| СИСТЕМА КОНТРОЛЯ СОСТОЯНИЯ ЁМКОСТЕЙ | 2022 |
|
RU2814793C1 |
| Способ автоматизированного беспроводного мониторинга угла наклона объектов контроля | 2019 |
|
RU2714969C1 |
| Способ контроля заполненности и местоположения мусоровоза и устройство для его осуществления | 2020 |
|
RU2754732C1 |
| Способ беспроводного обнаружения открывания объекта контроля | 2019 |
|
RU2697946C1 |
Изобретение относится к области коммунального хозяйства, в частности к автоматизации учета объемов собранного или вывезенного мусора и к дистанционному мониторингу уровня наполненности мусорных контейнеров (баков), и может быть использовано для автоматизации процесса учета и расчета объемов вывозимого мусора, планирования и организации вывоза мусора и для контроля за своевременным опорожнением мусорных контейнеров. Техническим результатом является обеспечение возможности мониторинга степени наполнения мусорного контейнера и объема мусора в контейнере, а также повышение точности и надежности мониторинга степени наполнения мусорных контейнеров и их очистки. Способ заключается в установке на стенке контейнера у его верхнего края устройства мониторинга уровня мусора, измерении степени наполнения контейнера и передачи информации о степени наполнения контейнера в программное обеспечение пользователя. Устройство мониторинга включает устройство перенаправления излучения, а также корпус, внутри которого размещены управляющий процессор и соединенные с ним радиопередающее устройство, измеритель расстояния и элемент питания. Корпус устанавливают с наружной стороны стенки контейнера, а устройство перенаправления устанавливают с внутренней стороны стенки контейнера напротив измерителя расстояния. 5 з.п. ф-лы, 4 ил.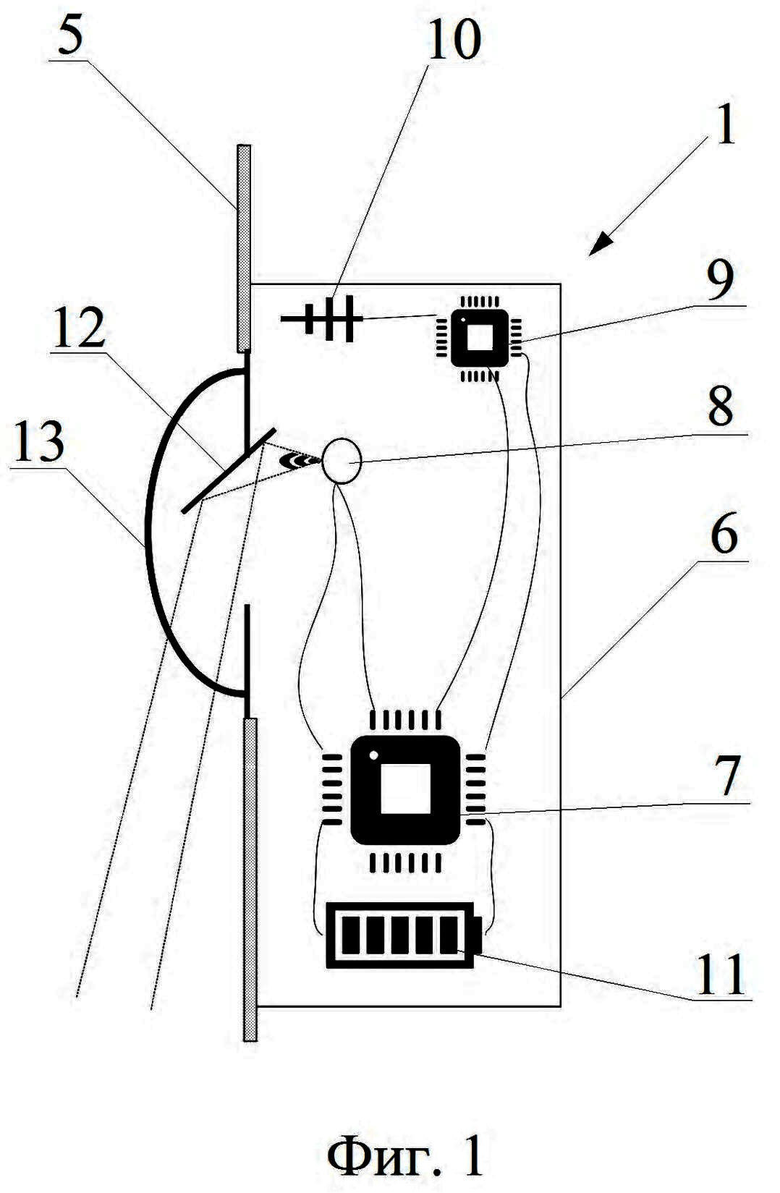
1. Способ мониторинга степени наполнения мусорного контейнера, заключающийся в установке на стенке контейнера у его верхнего края по меньшей мере одного устройства мониторинга уровня мусора, измерении степени наполнения контейнера и передачи информации о степени наполнения контейнера в программное обеспечение пользователя, при этом осуществляют установку по меньшей мере одного устройства мониторинга уровня мусора, включающего устройство перенаправления излучения, а также корпус, внутри которого размещены управляющий процессор и соединенные с ним радиопередающее устройство, измеритель расстояния и элемент питания, корпус устанавливают с наружной стороны по меньшей мере одной стенки контейнера, а устройство перенаправления устанавливают с внутренней стороны указанной по меньшей мере одной стенки контейнера напротив измерителя расстояния, осуществляют настройку сети связи и программного обеспечения пользователя путем внесения идентификационных данных по меньшей мере одного устройства мониторинга уровня мусора в связанную с программным обеспечением пользователя базу данных и ассоциации по меньшей мере одного устройства мониторинга уровня мусора с программным обеспечением пользователя, с помощью измерителя расстояния излучают измерительный сигнал, который с помощью устройства перенаправления излучения направляют сверху вниз под углом к дну контейнера, отличным от прямого, и регистрируют отраженный измерительный сигнал с помощью измерителя расстояния, сигнал с измерителя расстояния, содержащий значение измеренного расстояния, подают на управляющий процессор и с помощью радиопередающего устройства в соответствии с тактикой отправляют сообщения с помощью сети связи в программное обеспечение пользователя, причем каждое сообщение содержит идентификационные данные по меньшей мере одного устройства мониторинга уровня мусора и значение измеренного расстояния, а в программном обеспечении пользователя при принятии сообщений на основании значения измеренного расстояния определяют степень наполнения мусорного контейнера, при этом программное обеспечение пользователя осуществляет хранение полученных от по меньшей мере одного устройства мониторинга уровня мусора сообщений и ассоциацию с по меньшей мере одним устройством мониторинга уровня мусора.
2. Способ по п.1, отличающийся тем, что используют измеритель расстояния с СВЧ или ИК, или УЗ датчиком, а в качестве устройства перенаправления излучения используют зеркало или призму, установленную в прозрачном корпусе.
3. Способ по п.1, отличающийся тем, что используют устройство перенаправления излучения, выполненное с возможностью изменения угла направления измерительного сигнала.
4. Способ по п.1, отличающийся тем, что отправку сообщений радиопередающим устройством осуществляют с использованием LPWAN или NBIoT, или 2G, или 3G, или 4G, или 5G технологии.
5. Способ по п.1, отличающийся тем, что до начала отправки сообщений в программное обеспечение пользователя на устройстве мониторинга уровня мусора осуществляют настройку тактики отправки сообщений.
6. Способ по п.1, отличающийся тем, что при принятии программным обеспечением пользователя сообщений от по меньшей мере одного устройства мониторинга уровня мусора, программное обеспечение пользователя осуществляет перерасчет измеренного расстояния в объем мусора в контейнере.
| US 2019359421 A1, 28.11.2019 | |||
| KR 101421137 B1, 13.08.2014 | |||
| Оптический уровнемер | 1979 |
|
SU1004766A1 |
| WO 2018209375 A1, 22.11.2018 | |||
| [7,7,7,6,6,5,5-Гептафтор-4-4-бис (трифторметил) гептил] метилдихлорсилан для синтеза масло-,бензо-,морозостойких силоксановых полимеров | 1977 |
|
SU626569A1 |
| WO 2011058287 A1, 19.05.2011 | |||
| US 9382067 B2, 05.07.2016. | |||

