Изобретение относится к судостроению, в частности к монтажу судовых валопроводов.
Традиционно по ОСТ5Р.4368-2013 [1] после центровки и сборки валопровода на стапеле под действием сил, возникающих при перемещении его опор в результате деформаций корпусных конструкций, на плаву производится перецентровка валопровода.
В работе [2] предлагается метод перецентровки валопроводов и главных механизмов на плаву с использованием тензометрирования валов, позволяющим учитывать изменение напряжений валопровода при изменении упругой линии судна.
Сущность метода заключается в том, что на поверхности валов в различных сечениях по их длине устанавливают по четыре тензодатчика, включенных в мостовую схему. При вращении изогнутого вала меняется нагрузка на вал от реакций опор (подшипников) и, соответственно, изменяются напряжения валопровода. Изменяя положение опор, можно добиться отсутствия изменений напряжения (стабильности нагрузок на вал от реакций опор) или, практически, добиться заданного уровня изменения напряжений.
Указанную регулировку положения опор выполняют на плаву при некоторой загрузке корпуса судна. При изменении загрузки судна изменится форма его упругой линии, изменится взаимное положение опор валопровода и нарушится достигнутая центровка.
Точность известного существующего метода существенно зависит от чувствительности тензометров, базы между ними, длины валопровода, жесткости корпуса судна и характера кривой упругой линии валопровода.
Для оптимизации центрирования валопровода необходимо знать фактическую упругую линию как на момент центрирования, так и ее возможные изменения при изменении загрузки судна.
Метод, указанный в [2], не позволяет определить фактическую кривую упругой линии валопровода и обеспечить оптимальность ее формы при различных загрузках судна.
Указанный в прототипе способа тензодатчик является основным компонентом тензометра и предназначен для измерения деформаций. Деформации валопровода обычно производятся с помощью тензометров [3], позволяющих оценить величину изменений напряжений валов при вращении в районе опор и, при необходимости, за счет дополнительного перемещения опор обеспечить допустимый уровень напряжений в валах.
В простейшем случае тензометр [3] представляет собой упругую конструкцию с закрепленным на ней тензорезистором, например, из проволоки, изогнутой в виде спирали (решетки), оклеенной с обеих сторон пластинками изоляции из пленки лака или бумаги. Для подключения к электрической цепи устройство снабжено двумя медными выводными проводниками. Они привариваются или припаиваются к концам проволочной спирали и подключаются мостовой электрической схеме. Тензорезистор крепится на контролируемом валу в заданном сечении с помощью клея.
Напряжения при изгибе, измеряемые тензометрами, определяется по формуле:
где Δn - приращение показаний тензометра;
K - цена деления тензометра;
lб - база тензометра.
Недостатком проволочного тензометра является невозможность измерения углов поворота сечений валопровода и сравнительно низкая точность измерений.
Известен оптический тензометр Мартенса [4], принятый в качестве прототипа заявляемого изобретения, включающий планку с неподвижным ножом на одном ее конце и поворачиваемую металлическую призму с зеркальцем на другом конце. Нож и призма установлены на известной базе (известном расстоянии) друг от друга. Планка прижимается струбцинкой к испытуемому образцу. На зеркальце падает свет от осветителя. При деформации образца (например, вала) призма с зеркальцем поворачивается на угол пропорциональный деформации. При этом смещается световой зайчик от зеркальца, отражающийся на удаленной шкале, по которой с помощью зрительной трубы снимается отсчет.
Несмотря на то, что поворотная призма с зеркалом позволяет обеспечить точность измерений деформаций до 2 мкм при габаритах тензометра до 1000 мм, по существу указанный тензометр измеряет только деформации от растяжения и сжатия на поверхности вала. Однако с помощью тензометра Мартенса нельзя измерить углы поворота сечений валопровода при его изгибе, а кроме того при измерении напряжений в судовых валах выявляется также их недостаточная точность при приемлемых в практических работах габаритах.
Настоящее изобретение направлено на решение задачи разработки способа центровки валопровода, отвечающего повышенным требованиям нормативных документов, с использованием современного оптического тензометра. Технический результат, достигаемый при реализации изобретения, заключается в оптимизации центровки валопровода за счет повышения точности определения фактической упругой линии валопровода, а также расширение функциональных возможностей тензометра.
Для решения поставленной задачи предлагается способ центровки судового валопровода, при котором перед началом центровки устанавливают в заданных сечениях валопровода отражатели, поворачивают валопровод на угол 180° и измеряют наклоны ряда сечений валопровода при его повороте на всей длине от фланца главного упорного подшипника до фланца, выходящего из дейдвудной трубы, относительно базового сечения, расположенного, например, в плоскости фланца главного упорного подшипника. На основании результатов измерений наклонов сечений определяют форму фактической упругой линии валопровода. Далее оптимизируют форму упругой линии и перемещают опоры валопровода на величину разницы оптимизированной и фактической упругой линии. При этом в качестве измерителей используют оптический тензометр, с помощью которого определяют углы поворота сечений и фактическую упругую линию валопровода после деформаций корпуса корабля.
Оптимизация формы упругой линии может быть осуществлена по данным измерений, например, графически с помощью гибкой линейки, концы которой фиксируются относительно изображений осей главного упорного подшипника и дейдвуда валопровода, либо расчетным методом по минимуму напряжений в валопроводе (при изгибе его с углами наклона касательных к упругой линии на главном упорном подшипнике и дейдвуде равными фактическим их значениям относительно оси валопровода). При изменении положения опор после спуска в результате деформаций корпуса по указанным схемам и действиям определяется фактическая упругая линия валопровода и осуществляется его подцентровка до состояния оптимальной упругой линии.
Также для решения указанной задачи предлагается оптический тензометр, содержащий призму, осветитель, измеритель, выполненный на известной базе, и два отражателя, например, зеркала, связанные с реперными точками на поверхности испытуемого вала. Кроме того тензометр снабжен коллимирующими линзами, две из которых установлены между призмой и отражателями, а третья - между призмой и измерителем, осветитель установлен по оси треугольной призмы с отражающими гранями, обеспечивающей возможность деления луча, приходящего от осветителя, на две части, перпендикулярные оси призмы, отражатели установлены с возможностью отражения луча через призму на измерители, а измеритель установлен в плоскости, перпендикулярной оси призмы, и выполнен в виде позиционно-чувствительной матрицы или интерферометра.
В частном случае решения заявляемого тензометра один его отражатель выполнен в виде уголкового отражателя, между которым и призмой установлен разделительный кубик с полупрозрачной зеркальной гранью, обеспечивающий возможность деления луча, приходящего от призмы, на две части, а также снабжен вторым измерителем, выполненным в виде интерферометра, и зеркалом, установленные на одной оси с разных (двух) сторон от кубика в плоскости, перпендикулярной оси призмы уголкового отражателя.
В другом частном случае элементы измерительного блока тензометра размещены в корпусе, снабженном узлом крепления к испытуемому валу.
Сущность предлагаемого технического решения поясняется чертежами:
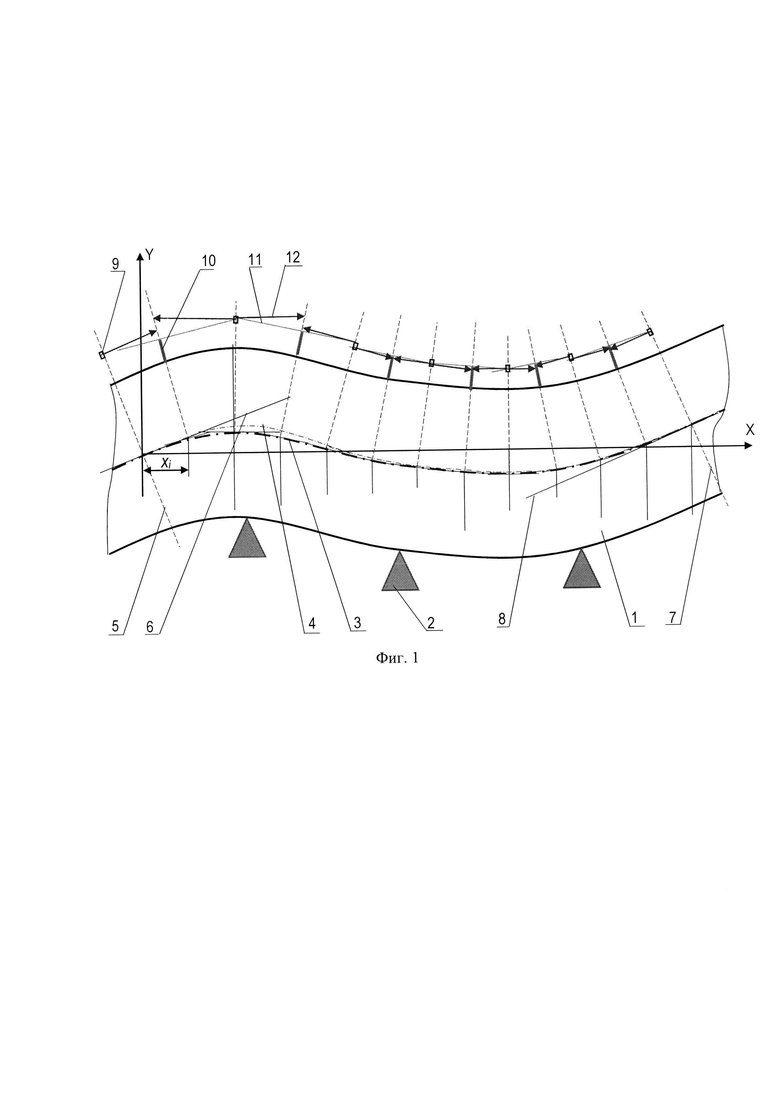
на фиг. 1 показана схема определения наклонов сечений валопровода и его центровки;
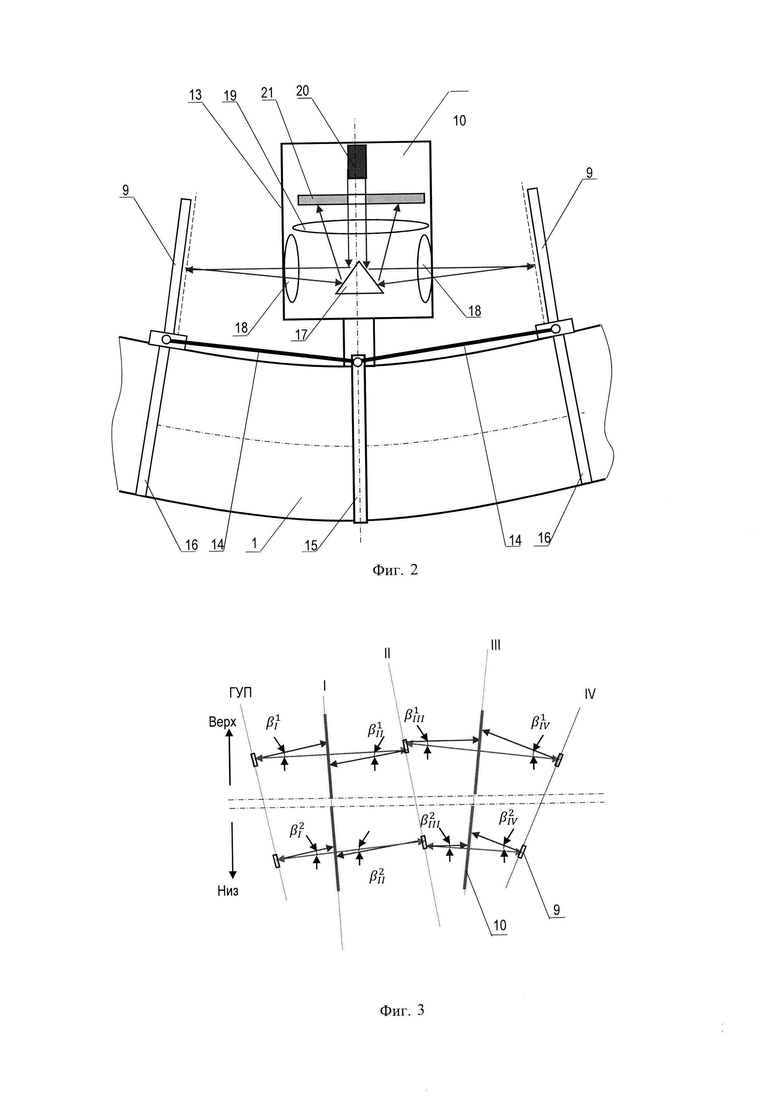
На фиг. 2 - схема оптического тензометра для определения углов поворота заданных сечений вала относительно его базового сечения;
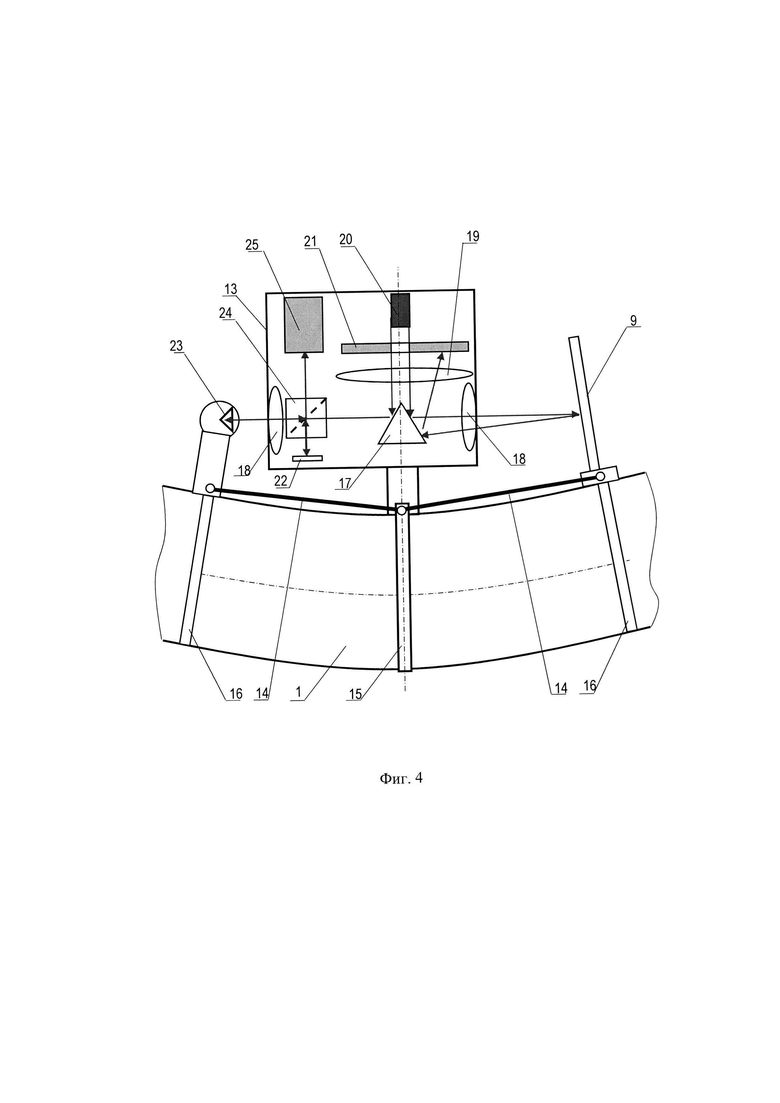
На фиг. 3 - схема определения поворотов сечений;
На фиг. 4 - схема оптического тензометра как для определения углов поворота заданных сечений вала относительно его базового сечения, так и напряжений вала. Правая часть измерительной схемы идентична рисунку 1 и служит для измерения только поворотов сечений вала, левая часть служит для измерения поворотов и напряжений вала.
На схеме фиг. 1 показаны: 1 - центруемый валопровод; 2 - опоры; 3 - фактическая линия валопровода; 4 - оптимальная кривая упругой линии валопровода; 5 - базовая плоскость (плоскость фланца главного упорного подшипника (ГУП); 6 - ось ГУП; 7 - плоскость фланца дейдвудного вала; 8 - ось дейдвудного вала; 9 - зеркала измерителя деформаций (отражатели), установленного в контролируемой плоскости сечения валопровода; 10 - измеритель угловых деформаций, установленный в заданном сечении валопровода; 11 - луч измерителя деформаций; 12 - луч, отраженный от зеркала 9; X - длина; Y - прогиб оси валопровода, xi - расстояние от ГУП до контролируемого сечения.
Из фиг. 1 видно, что в ряде сечений валопровода 1, расположенного на опорах 2, устанавливают измерители поворотов 10 сечений (оптические тензометры) и их отражатели 9, например, зеркала, в том числе устанавливается зеркало на фланце главного упорного подшипника 5. Лучи 11 измерителей 10 направляются на зеркала 9. Отраженные лучи 12, несущие информацию об углах поворота зеркал 9 (и, следовательно, о повороте сечений изогнутого валопровода), поступают на измерители 10.
Тензометр, показанный на фиг. 2, содержит: 1 - валопровод; 21 - матрица позиционно-чувствительного элемента (измеритель изгиба). 9 - два отражателя (зеркала), устанавливаемые в контролируемых сечения вала; 10 - измеритель угловых деформаций, 13 - корпус измерителя 10, устанавливаемый в базовом сечении вала; 14 - две шарнирные планки известной длины (базы), позиционирующие зеркала 9 относительно измерительного блока (после позиционирования и измерений удаляются, либо исполняются с возможностью свободного перемещения зеркал относительно измерителя); 15 - пояс крепления измерительного блока на валу; 16 - пояс крепления зеркала на валу; 17 - стеклянная призма измерительного блока; 18 - коллимирующая линза; 19 - коллимирующая линза; 20 - осветитель (светодиод).
Лазерный луч от светодиода 20 попадает на призму 17 и делится ею на две части, перпендикулярные оси светодиода и призмы. Далее эти два луча коллимируются линзами 18 и поступают на зеркала 9. После отражения от зеркал 9 лучи возвращаются в измерительный блок и после отражения от призмы 17, проходя коллимирующую линзу 19, попадают на матрицу 21 позиционно-чувствительного элемента, вырабатывающую измерительный сигнал. При повороте зеркал 9 отраженные лучи меняют свое положение на матрице 21 и дают сигнал, пропорциональный повороту зеркал и, следовательно, после тарировки, измеряют угол поворота контролируемых сечений вала относительно базового сечения.
На фиг. 3 представлена схема определения поворотов сечений относительно сечения ГУП после поворота валопровода на 180°. Здесь 9 - отражатель (зеркало); 10 - измеритель угловых деформаций; βi1 - углы в сечениях i - при положении системы измеритель-зеркало сверху вала, βi2 - углы в сечениях i - при положении системы измеритель-зеркало после поворота вала на 180°.
Поворот сечения I:

Поворот сечения II:

Поворот сечения III:
Поворот сечения i:
Получив значения углов наклона сечений относительно ГУП можно получить уравнение, коэффициенты которого определяются аппроксимированием по методу наименьших квадратов уравнением параболы третьей степени
β=ƒ+ах+bx2+сх3,
где β - наклон касательной в данном сечении относительно ЦКП, рад.;
х - расстояние между ГУП и сечением, в котором расположено данное зеркало, м;
ƒ - свободный член, характеризующий наклон ГУП относительно оси X, рад;
ƒ, а, b, с - коэффициенты, рассчитываемые на ПЭВМ на основе результатов измерений наклонов зеркал относительно измерителей и ГУП.
Коэффициенты ƒ, a, b, с уравнения следует определять из решения следующей системы уравнений:
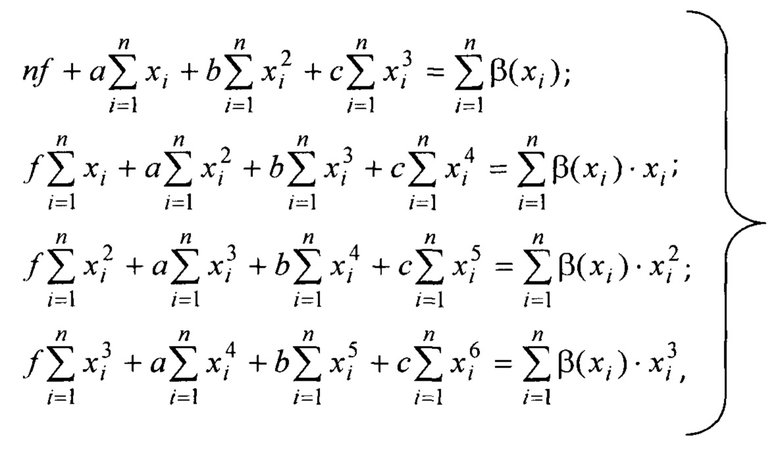
где n - количество сечений (без сечения ГУП);
β(xi) - результаты измерений наклонов зеркал относительно зеркала ГУП (в направлении, параллельном ДП) в данном сечении, угл.с.
В результате интегрирования уравнения наклонов уравнение упругой линии судна примет вид:
V(x)=4,848⋅10-3ƒx+2,424⋅10-3ax2+1,616⋅10-3bx3+1,212⋅10-3cx4,
где V(x) - прогиб данного сечения корпуса корабля, мм.
После определения формы фактической упругой линии валопровода выполняют оптимизацию формы упругой линии, например, графически с помощью гибкой линейки, концы которой фиксируются относительно изображений осей главного упорного подшипника и валопровода, либо расчетным методом по минимуму напряжений в валопроводе по ОСТ5Р.4368-2013.
Затем осуществляют подцентровку валопровода, перемещая его опоры на разницу расстояний между фактической и оптимизированной упругими линиями валопровода.
При центровке валопровода по напряжениям используют тензометр, показанный на фиг. 4, и обеспечивающий более высокую точность в сравнении существующими тензометрами. Этот же тензометр может быть использован для центровки валопровода по узлам поворота сечений, аналогично тензометру, представленному на фиг. 3.
Тензометр, показанный на фиг. 4, включает в себя: 1 - вал; 9 - отражатель (зеркало); 13 - корпус измерителя 10; 14 - шарнирная планка известной длины (база); 15 - пояс крепления измерительного блока на валу; 16 - пояс крепления отражателей на валу; 17 - призма; 18 - коллимирующая линза; 19 - коллимирующая линза; 20 - осветитель (светодиод); 21 - матрица позиционно-чувствительного элемента (измеритель); 22 - зеркало; 23 - уголковый отражатель; 24 - кубик с полупрозрачной зеркальной гранью; 25 - интерферометр.
Источники информации
1. ОСТ5Р.4368-2013. Валопроводы судовых движительных установок. Монтаж. Технические требования, правила приемки и методы контроля
2. Vassilopoulos L. Static and Underway Alignment of Main Propulsion Shaft Systems. "Naval Engineers Journal", 1988
3. Мехеда В.А. Тензометрический метод измерения деформаций изд. СГАУ, Самара, 2011
4. Шапошников Н.А. Механические испытания металлов, 2 изд., М. - Л., 1954.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ЛОКАЛЬНОГО РАДИУСА КРИВИЗНЫ УПРУГОДЕФОРМИРОВАННОЙ ЭТАЛОННОЙ БАЛКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2581440C1 |
| Датчик угла скручивания | 1990 |
|
SU1776989A1 |
| Способ центровки судового валопровода | 1987 |
|
SU1468818A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОПЕРЕЧНОГО РАЗМЕРА ДЕТАЛИ | 1990 |
|
RU2047091C1 |
| СПОСОБ МОНТАЖА СУДОВОГО ВАЛОПРОВОДА | 1991 |
|
RU2031055C1 |
| Оптический способ центровки судовых механизмов | 1982 |
|
SU1046159A1 |
| Способ центровки макет-кондукторов судовых механизмов | 1980 |
|
SU901145A1 |
| Устройство для измерения взаимного углового положения объектов | 1976 |
|
SU679791A1 |
| Фотоэлектрический автоколлиматор | 1977 |
|
SU603939A2 |
| НАКЛАДНОЙ ПРИБОР ДЛЯ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ЦИЛИНДРИЧЕСКОЙ ПОВЕРХНОСТИ КРУПНОГАБАРИТНЫХ ДЕТАЛЕЙ | 1996 |
|
RU2180428C2 |
Изобретение относится к судостроению, в частности к монтажу судовых валопроводов. Заявлен способ центровки судового валопровода, при котором перед началом центровки устанавливают измерители, поворачивают валопровод на угол 180° и дважды (до и после поворота) измеряют наклоны сечений валопровода, после чего перемещают опоры по показаниям измерителей. В качестве измерителей используют оптический тензометр с отражателями, которые устанавливают в заданных сечениях валопровода, с помощью которого определяют углы поворота сечений и фактическую упругую линию валопровода после деформаций корпуса корабля, а перемещение опор осуществляют на величину разницы между фактической упругой линией валопровода и ее упругой оптимизацией по осям главного упорного подшипника и дейдвуда валопровода. Заявленный оптический тензометр содержит призму, осветитель, измерительный блок и два отражателя, связанные с реперными точками на поверхности испытуемого вала. При этом тензометр снабжен коллимирующими линзами, две из которых установлены между призмой и отражателями, а третья - между призмой и измерительным блоком. Осветитель установлен по оси треугольной призмы с отражающими гранями, обеспечивающей возможность деления луча, приходящего от осветителя, на две части, перпендикулярные оси призмы. Отражатели установлены с возможностью отражения луча через призму на измерительный блок, а измерительный блок установлен в плоскости, перпендикулярной оси призмы, и выполнен в виде позиционно-чувствительной матрицы. Технический результат - оптимизация центровки валопровода за счет повышения точности определения фактической упругой линии валопровода, а также расширение функциональных возможностей тензометра. 2 н. и 2 з.п. ф-лы, 4 ил. 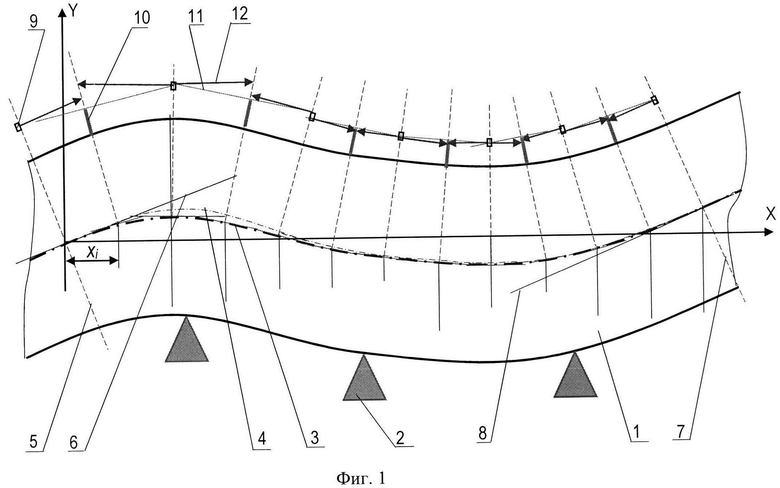
1. Способ центровки судового валопровода, при котором перед началом центровки устанавливают измерители, поворачивают валопровод на угол 180° и дважды (до и после поворота) измеряют наклоны сечений валопровода, после чего перемещают опоры по показаниям измерителей, отличающийся тем, что в качестве измерителей используют оптический тензометр с отражателями, которые устанавливают в заданных сечениях валопровода, с помощью которого определяют углы поворота сечений и фактическую упругую линию валопровода после деформаций корпуса корабля, а перемещение опор осуществляют на величину разницы между фактической упругой линией валопровода и ее упругой оптимизацией по осям главного упорного подшипника и дейдвуда валопровода.
2. Оптический тензометр, содержащий призму, осветитель, измерительный блок и два отражателя, связанные с реперными точками на поверхности испытуемого вала, отличающийся тем, что тензометр снабжен коллимирующими линзами, две из которых установлены между призмой и отражателями, а третья - между призмой и измерительным блоком, осветитель установлен по оси треугольной призмы с отражающими гранями, обеспечивающей возможность деления луча, приходящего от осветителя, на две части, перпендикулярные оси призмы, отражатели установлены с возможностью отражения луча через призму на измерительный блок, а измерительный блок установлен в плоскости, перпендикулярной оси призмы, и выполнен в виде позиционно-чувствительной матрицы.
3. Оптический тензометр по п. 2, отличающийся тем, что один его отражатель выполнен в виде уголкового отражателя, между которым и призмой установлен разделительный кубик с полупрозрачной зеркальной гранью, обеспечивающий возможность деления луча, приходящего от призмы, на две части, а также снабжен вторым измерительным блоком, выполненным в виде интерферометра, и зеркалом, установленнымми на одной оси с разных (двух) сторон от кубика в плоскости, перпендикулярной оси призмы уголкового отражателя.
4. Оптический тензометр по п. 2 или 3, отличающийся тем, что элементы его измерительного блока размещены в корпусе, снабженном узлом крепления к испытуемому валу.
| Шапошников Н.А | |||
| Механические испытания металлов, 2 изд., М | |||
| - Л., 1954 | |||
| Способ центровки судового валопровода | 1987 |
|
SU1468818A1 |
| Способ центровки судового валопровода | 1982 |
|
SU1081074A1 |
| Электронный влагомер | 1959 |
|
SU125687A1 |

