ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к электромагнитному приводному механизму с магнитным сцеплением, имеющему в своем составе подвижный сердечник, установленный с возможностью скольжения в осевом направлении вдоль продольной оси внутри магнитного каркаса между положением сцепления и положением расцепления. Этот электромагнитный приводной механизм дополнительно содержит постоянный магнит и катушку, проходящую в осевом направлении вдоль продольной оси этого магнитного каркаса. Катушка выполнена с возможностью создания первого магнитного потока управления для перемещения подвижного сердечника из положения расцепления к положению сцепления, и второго магнитного потока управления, противодействующего магнитному потоку поляризации постоянного магнита и обеспечивающего возможность перемещения подвижного сердечника из положения сцепления к положению расцепления.
Настоящее изобретение относится также к устройству разъединения, содержащему, по меньшей мере, один неподвижный контакт, взаимодействующий с, по меньшей мере, одним подвижным контактом, выполненным с возможностью коммутации питания электрической нагрузки.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Использование электромагнитных приводных механизмов с магнитным сцеплением для управления расцеплением и сцеплением устройства разъединения, в частности вакуумной колбы, известно и описано, в частности, в патентных документах ЕР 0867903 В1 и US 6373675 В1.
Принимая во внимание геометрические характеристики магнитного контура различных известных электромагнитных приводных механизмов, получение усилий, пригодных для перемещения механизмов управления, обычно требует использования катушек управления, имеющих достаточно большие размеры или характеризующихся весьма значительной электрической мощностью управления (то есть значительным количеством ампер-витков) вследствие относительно небольшого коэффициента полезного действия такого электромагнитного приводного механизма.
Кроме того, принимая во внимание позиционирование одного или нескольких постоянных магнитов в магнитном контуре, имеется возможность наблюдать опасность размагничивания этих постоянных магнитов. Действительно, как это представлено в патентной заявке WO 095/07542, в том случае, когда эти постоянные магниты располагаются последовательно в магнитном контуре, магнитный поток, создаваемый катушкой управления, может противодействовать магнитному потоку, создаваемому постоянным магнитом, и может вызывать с течением времени размагничивание этих постоянных магнитов, в частности, в процессе размыкания контактов.
Другие технические решения, такие, например, как техническое решение, описанное в патентной заявке WO 2008/135670, требуют использования постоянных магнитов, обладающих весьма значительными объемами, для того, чтобы гарантировать поддержание положения сцепления даже в процессе воздействия достаточно сильных механических ударов. Таким образом, эти постоянные магниты оказываются достаточно дорогостоящими.
Другие технические решения, такие, например, как техническое решение, описанное в патентной заявке WO 95/07542, представляют опасность существования промежуточного устойчивого положения в отсутствие достаточно мощной возвратной пружины. При этом следует отметить, что нежелательно иметь те или иные устойчивые положения приводного механизма, отличные от положения расцепления и положения сцепления. Для того чтобы устранить эту проблему, избыточно мощные возвратные пружины используются для расцепления электромагнитных приводных механизмов, что приводит к необходимости использования дополнительной энергии для сцепления упомянутых электромагнитных приводных механизмов (фаза тяги).
И наконец, технические решения, такие, например, как техническое решение, описанное в патентной заявке ЕР 1012856 В1, подразумевают использование двух различных катушек, одна из которых предназначена для сцепления, а другая предназначена для расцепления, что подразумевает, таким образом, дополнительное увеличение стоимости.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩЕСТВА ИЗОБРЕТЕНИЯ
Задача предлагаемого изобретения состоит в том, чтобы устранить недостатки существующего уровня техники в данной области и предложить электромагнитный приводной механизм с высоким энергетическим коэффициентом полезного действия.
Постоянный магнит электромагнитного приводного механизма в соответствии с предлагаемым изобретением расположен на подвижном сердечнике таким образом, чтобы находиться, по меньшей мере частично, за пределами фиксированного магнитного контура, в котором протекает первый магнитный поток управления, в том случае, когда подвижный сердечник находится в положении расцепления, и чтобы находиться, по меньшей мере частично, внутри фиксированного магнитного контура, используемого для протекания магнитного потока поляризации, создаваемого постоянным магнитом, в том случае, когда подвижный сердечник находится в положении сцепления.
В соответствии с первым вариантом реализации предлагаемого изобретения постоянный магнит является намагниченным в радиальном направлении, перпендикулярном к продольной оси каркаса.
Предпочтительным образом каркас содержит внутреннюю втулку, проходящую вокруг подвижного сердечника, причем постоянный магнит расположен на подвижном сердечнике таким образом, чтобы находиться, по меньшей мере частично, напротив внутренней втулки магнитного каркаса, в том случае, когда подвижный сердечник находится в положении сцепления.
Предпочтительным образом эта внутренняя втулка проходит на расстоянии перекрытия с размещенным напротив нее в положении сцепления постоянным магнитом.
Предпочтительным образом внутренняя втулка отделена от подвижного сердечника при помощи скользящего радиального воздушного зазора, остающегося одинаковым в процессе поступательного перемещения подвижного сердечника.
В соответствии со вторым вариантом реализации предлагаемого изобретения постоянный магнит является намагниченным в осевом направлении, ориентированным вдоль продольной оси каркаса.
В соответствии со специфическим вариантом реализации постоянный магнит расположен на подвижном сердечнике таким образом, чтобы полностью находиться снаружи по отношению к магнитному каркасу, в том случае, когда подвижный сердечник находится в положении расцепления.
В соответствии с вариантом реализации электромагнитный приводной механизм содержит кожух, изготовленный из неферромагнитного материала и располагающийся на уровне наружной поверхности магнитного каркаса таким образом, чтобы перекрывать весь подвижный сердечник в положении расцепления.
В соответствии с вариантом реализации подвижный сердечник содержит радиальную поверхность, выполненную с возможностью прижатия к магнитному каркасу в его положении сцепления, причем упомянутая поверхность является меньшей, чем среднее поперечное сечение этого сердечника.
Предпочтительным образом предлагаемый электромагнитный приводной механизм содержит, по меньшей мере, одну возвратную пружину, противодействующую перемещению подвижного сердечника из положения расцепления в положение сцепления.
В соответствии со специфическим вариантом реализации подвижный магнитный сердечник соединен с приводным немагнитным элементом, проходящим вдоль продольной оси.
Предпочтительным образом предлагаемый электромагнитный приводной механизм содержит подвижную втулку, которая может быть приведена в действие вручную или при помощи электромеханического приводного механизма.
Устройство разъединения в соответствии с предлагаемым изобретением содержит по меньшей один электромагнитный приводной механизм определенного выше типа, предназначенный для приведения в действие упомянутого, по меньшей мере, одного подвижного контакта.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылкой на сопроводительные чертежи, на которых:
Фиг. 1А и 1В представляют собой виды в разрезе электромагнитного приводного механизма в фазе сцепления в двух положениях функционирования в соответствии с первым вариантом реализации предлагаемого изобретения;
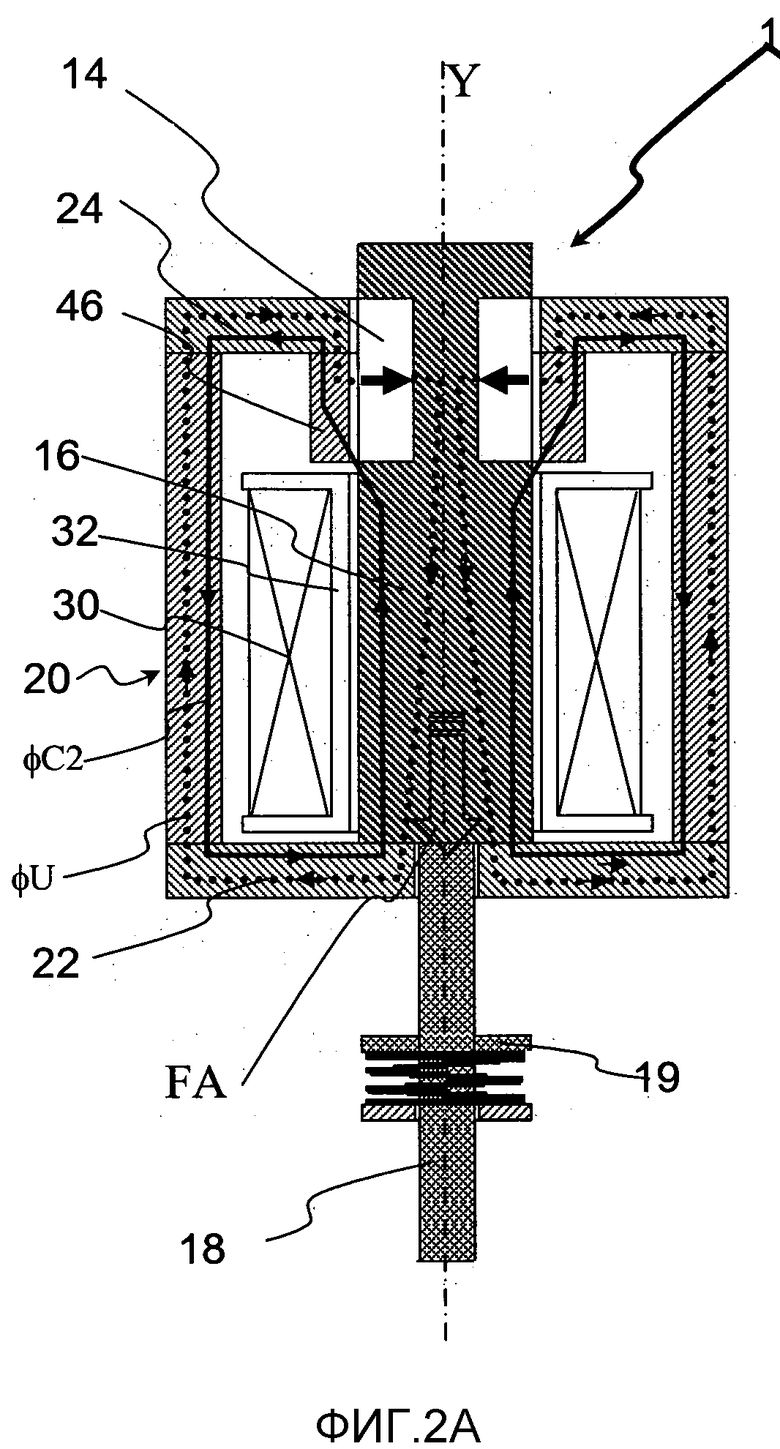
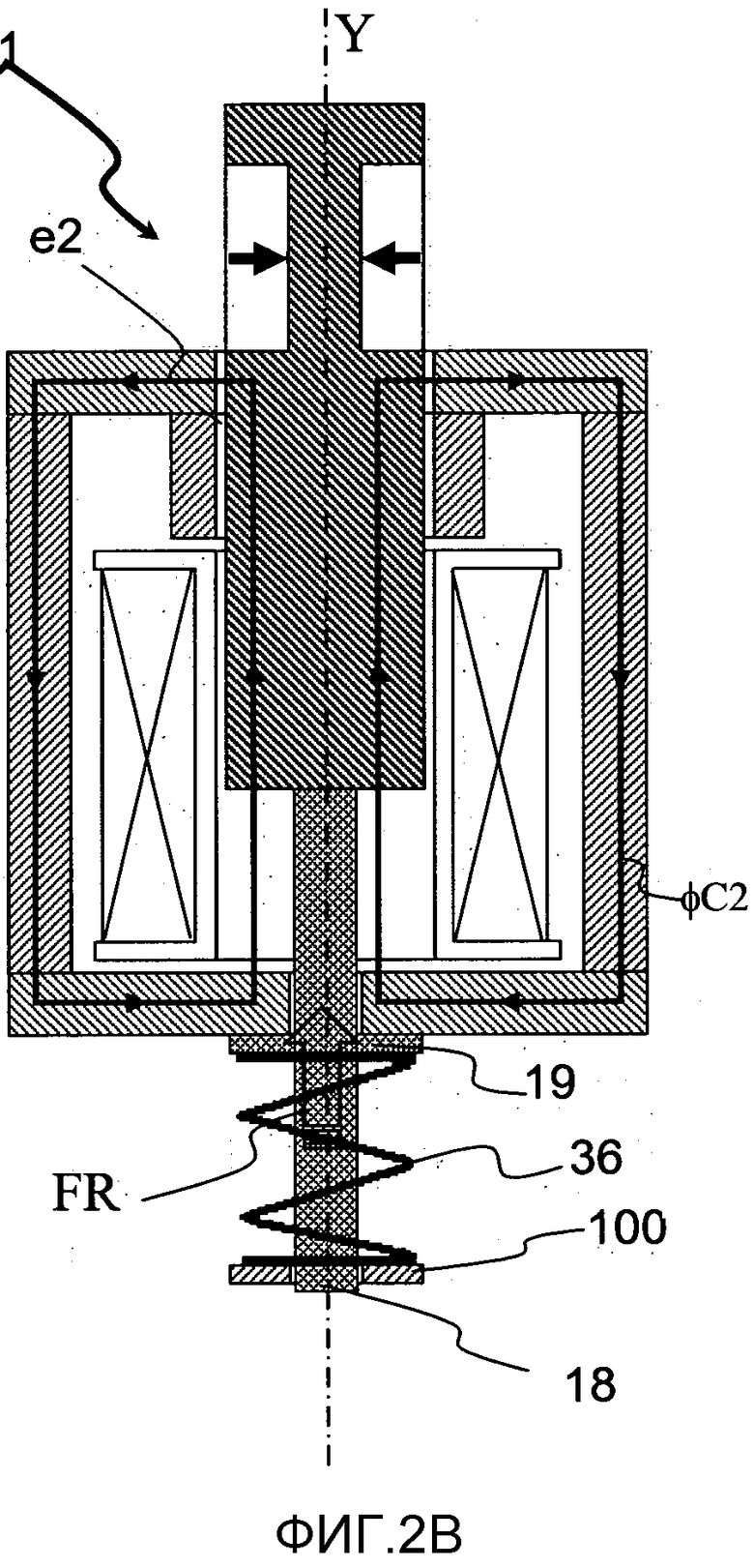
Фиг. 2А и 2В представляют собой виды в разрезе электромагнитного приводного механизма в фазе расцепления в двух положениях функционирования в соответствии с первым вариантом реализации предлагаемого изобретения;
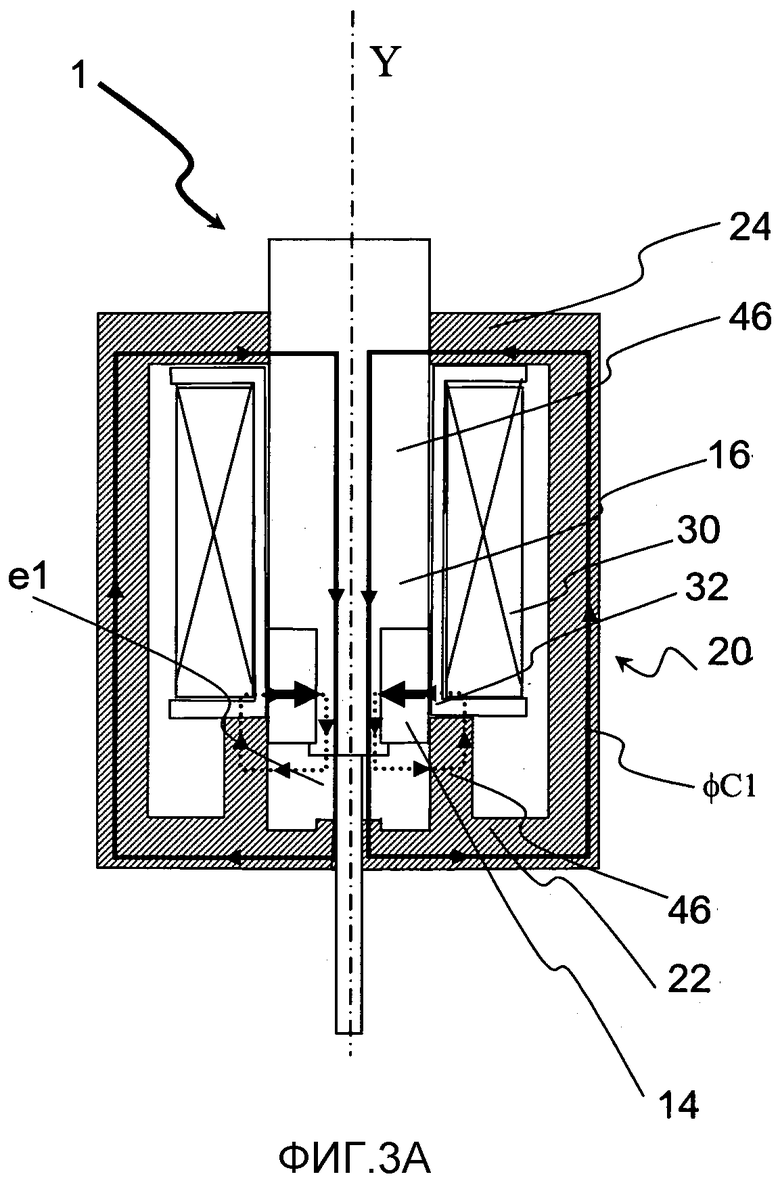
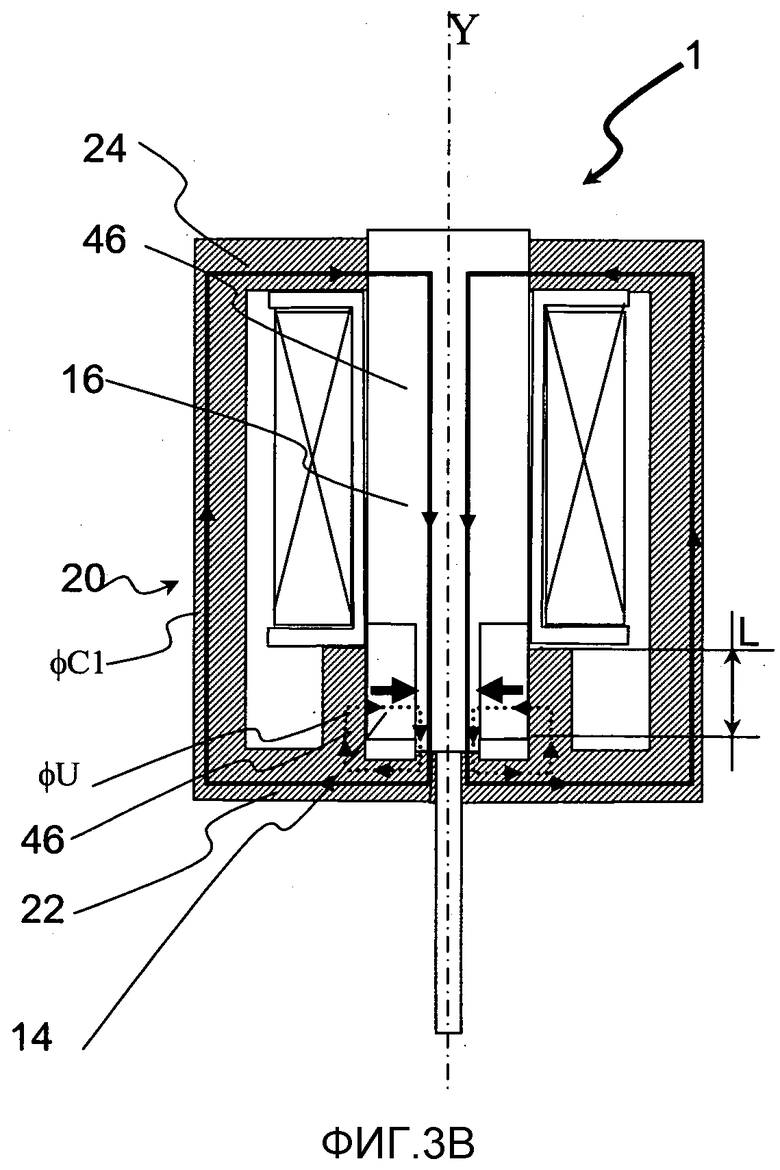
Фиг. 3А и 3В представляют собой виды в разрезе электромагнитного приводного механизма в фазе сцепления в двух положениях функционирования в соответствии с вариантом реализации, представленным на фиг. 1А и 1В;
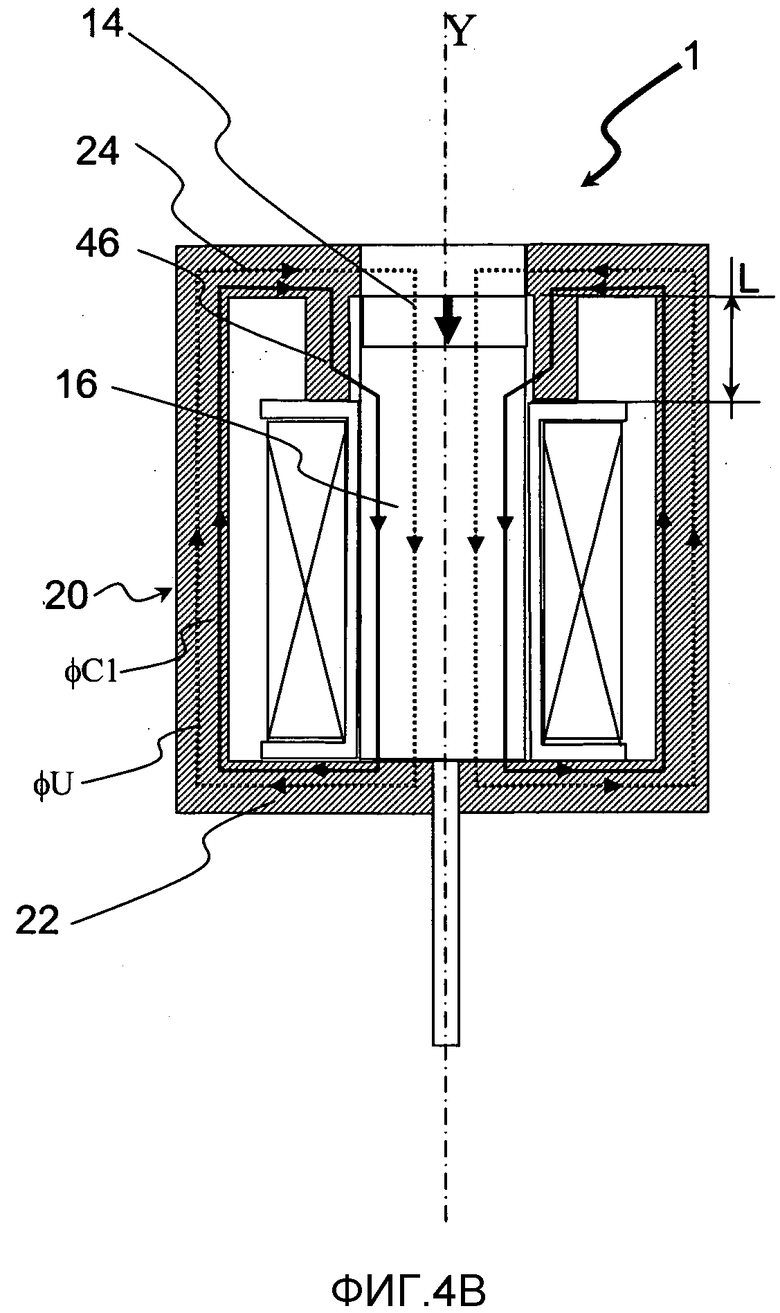
Фиг. 4А и 4В представляют собой виды в разрезе электромагнитного приводного механизма в фазе сцепления в двух положениях функционирования в соответствии со вторым вариантом реализации предлагаемого изобретения;
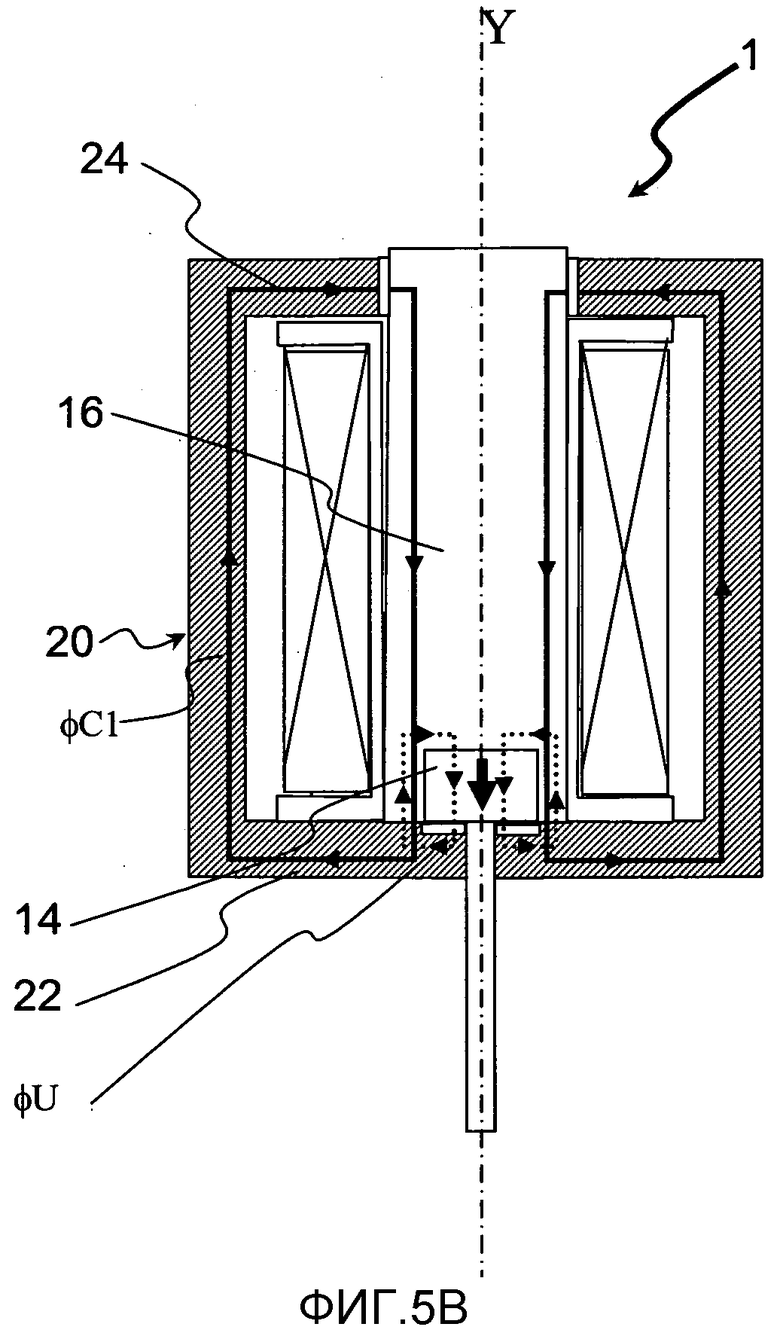
Фиг. 5А и 5В представляют собой виды в разрезе электромагнитного приводного механизма в фазе сцепления в двух положениях функционирования в соответствии с вариантом реализации, представленным на фиг. 1А и 1В;
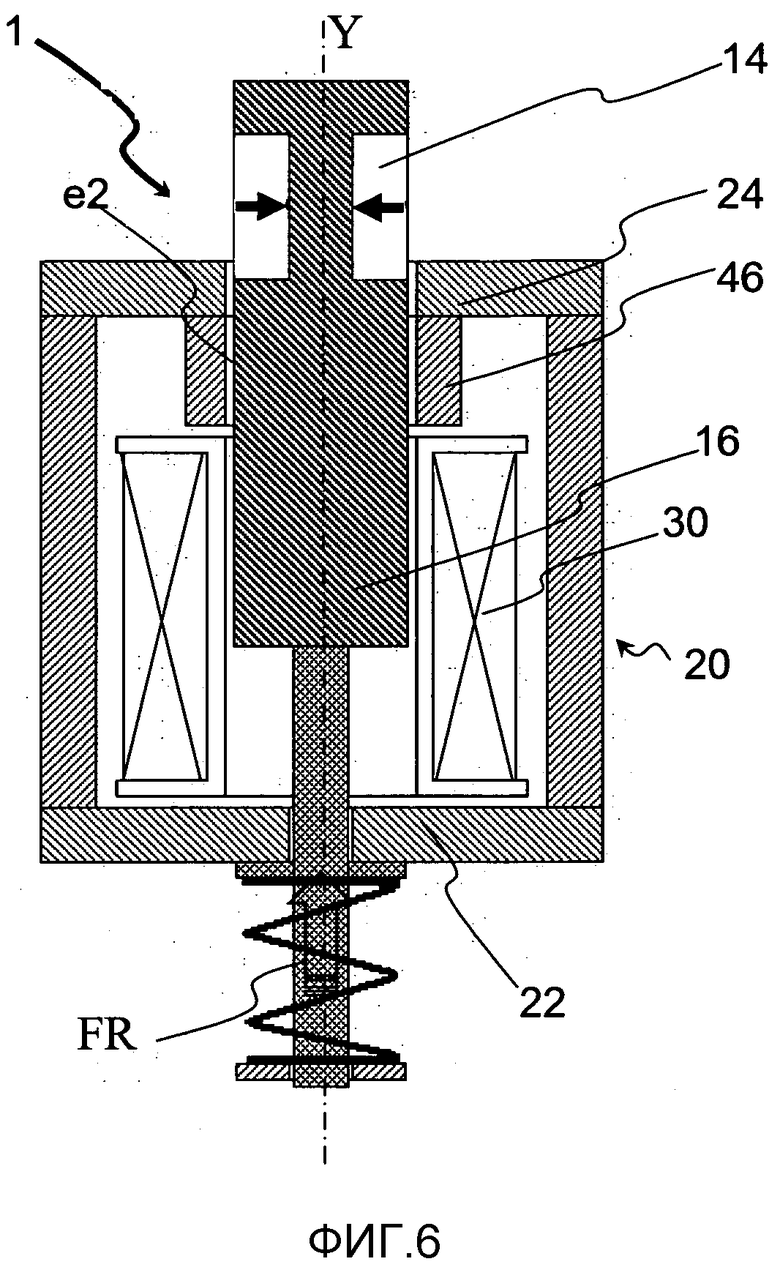
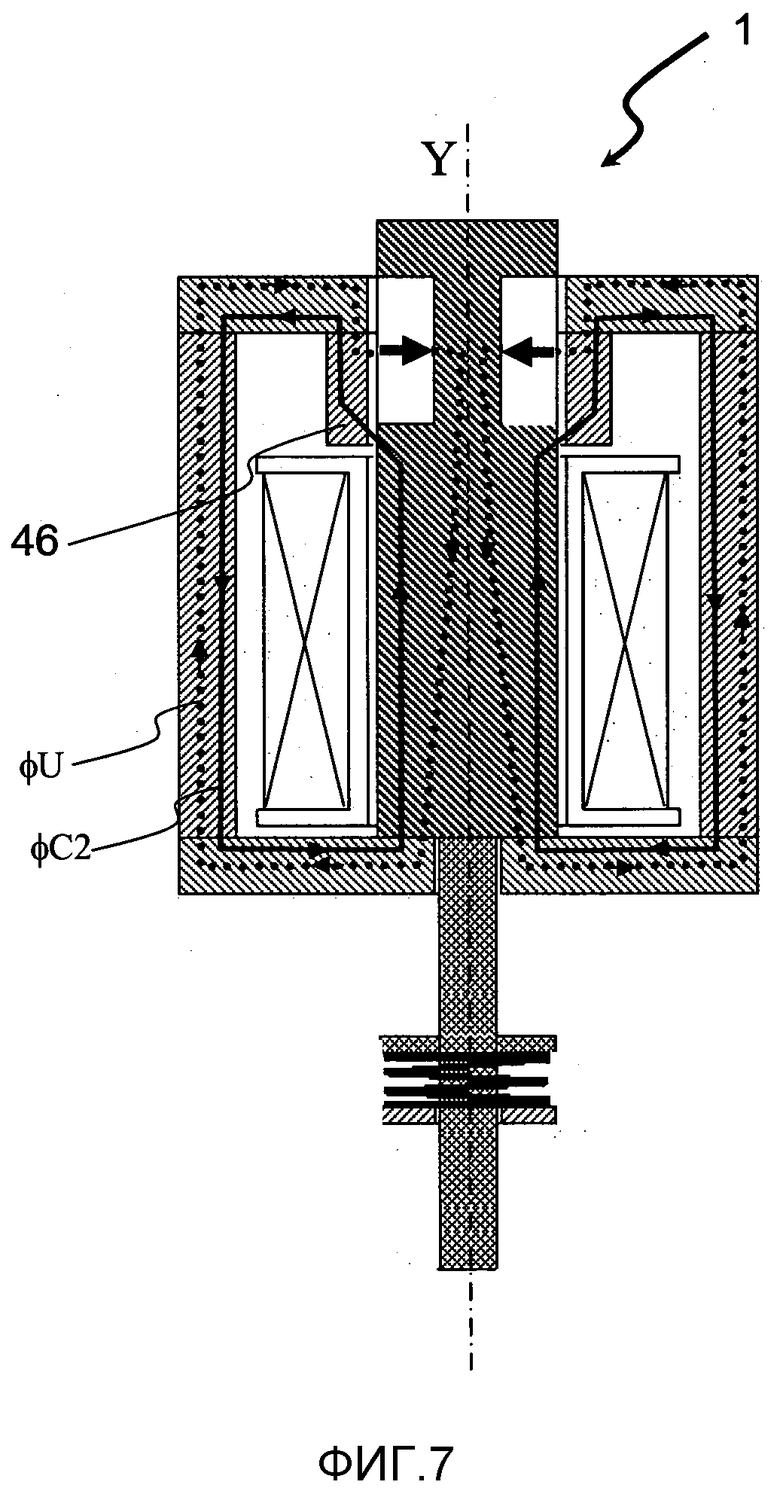
Фиг. 6 и 7 представляют собой виды в разрезе вариантов реализации электромагнитного приводного механизма, представленного на фиг. 1А и 2А;
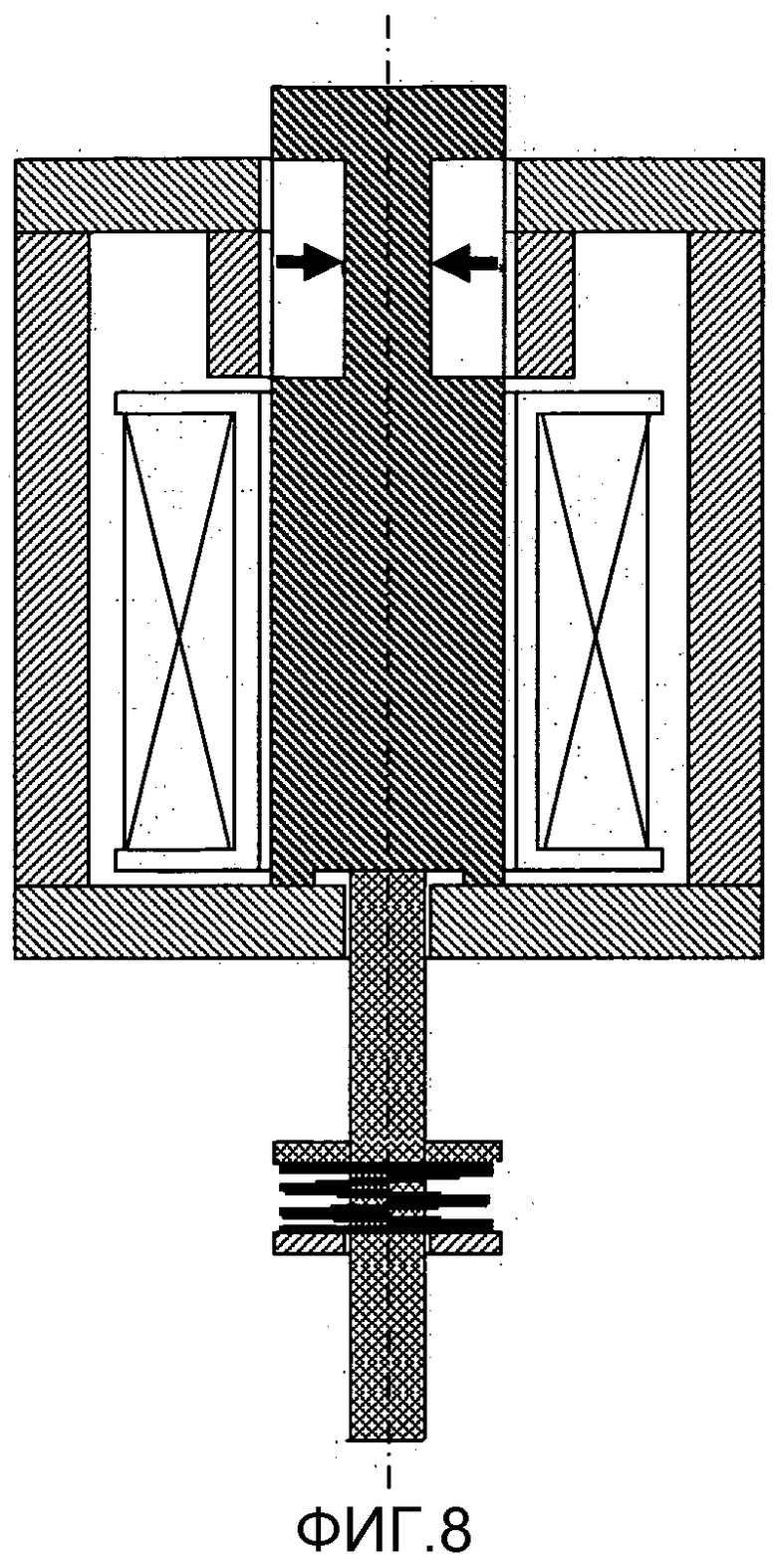
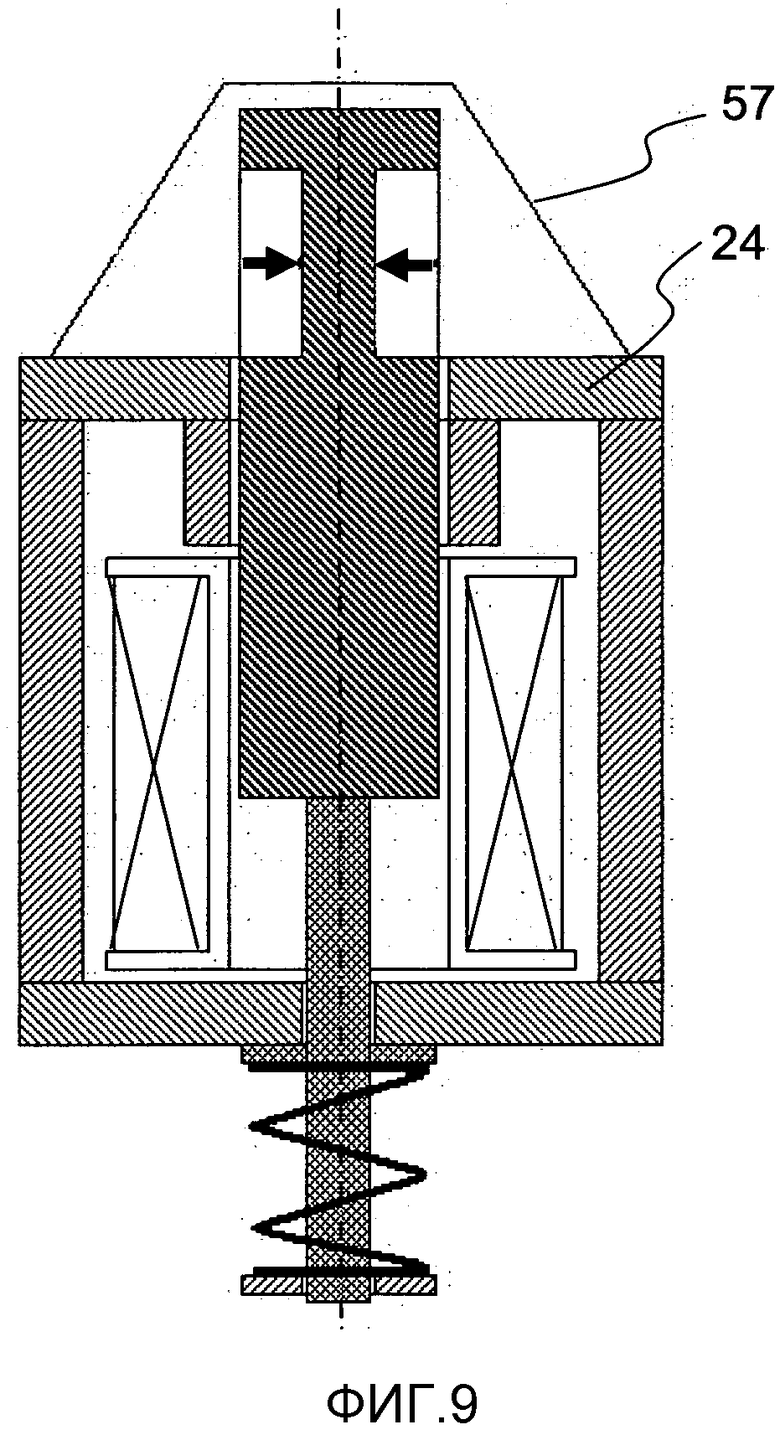
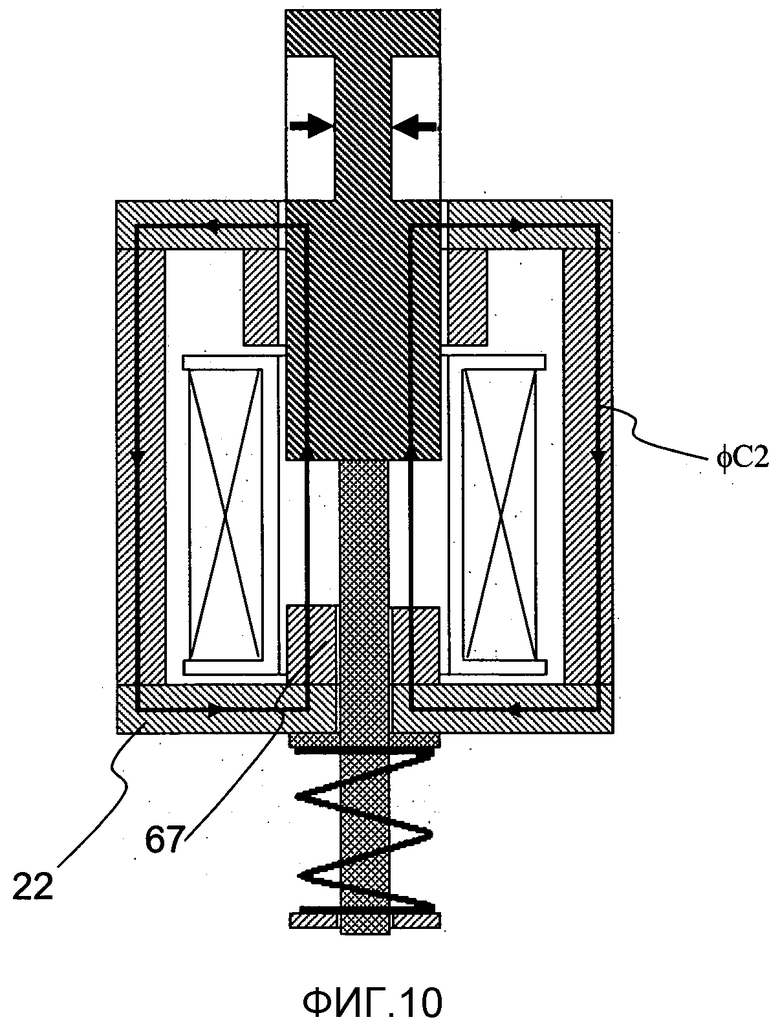
Фиг. 8, 9 и 10 представляют собой виды в разрезе вариантов реализации электромагнитного приводного механизма в соответствии с различными вариантами реализации предлагаемого изобретения;
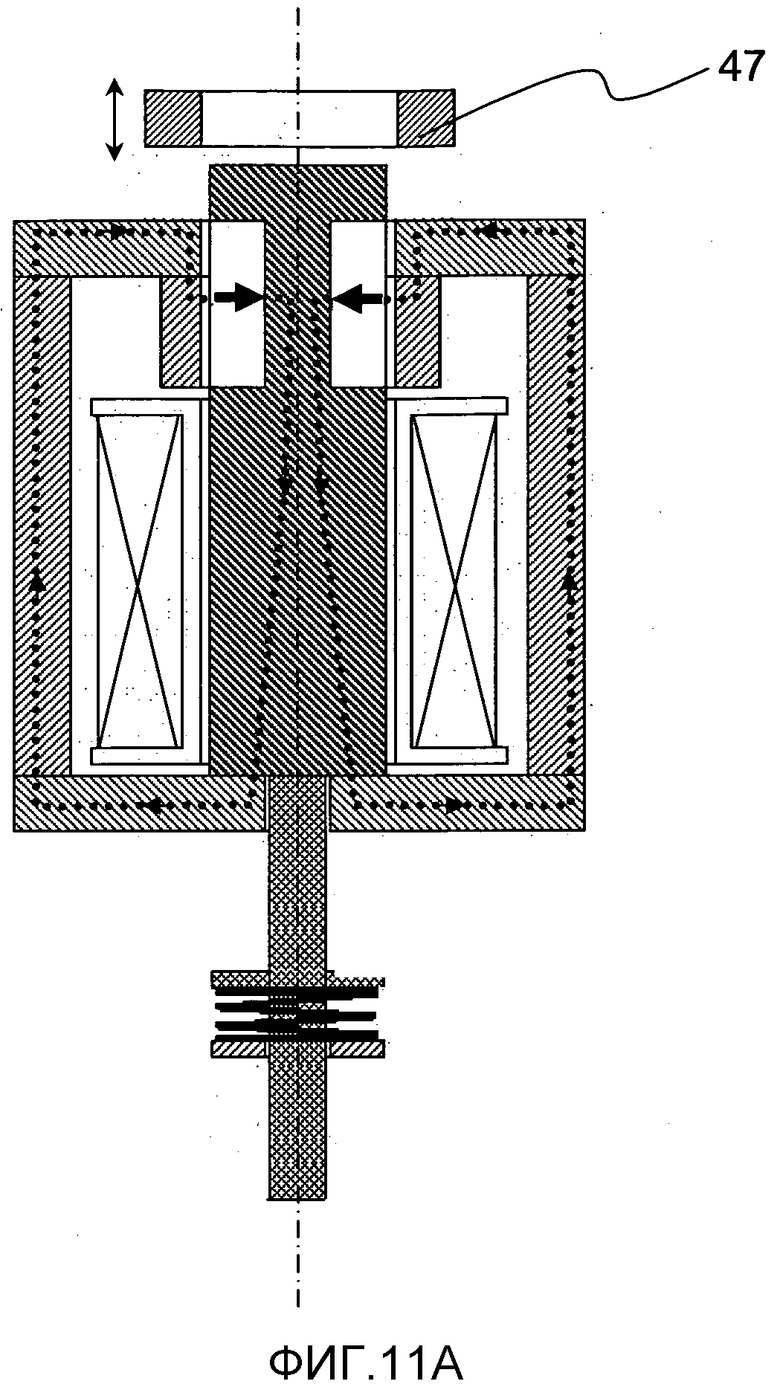
Фиг. 11А и 11В представляют собой виды в разрезе варианта реализации электромагнитного приводного механизма в положении сцепления, представленного на фиг.1А;
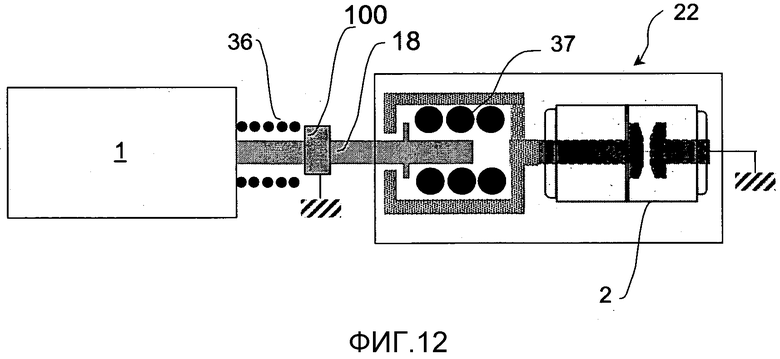
Фиг. 12 представляют собой вид синоптической схемы электромагнитного приводного механизма, соединенного с устройством разъединения.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ РЕАЛИЗАЦИИ
В соответствии с первым вариантом реализации, представленным на фиг. 1А и 1В, электромагнитный приводной механизм 1 с магнитным сцеплением содержит фиксированный магнитный контур из ферромагнитного материала.
Этот фиксированный магнитный контур содержит магнитный каркас 20, проходящий вдоль продольной оси Y. Магнитный каркас 20 магнитного контура содержит на своих противоположных концах параллельные между собой первый и второй фланцы 22, 24. Фланцы 22, 24 проходят перпендикулярно к продольной оси Y магнитного каркаса 20.
Предпочтительным образом магнитный каркас 20 состоит из двух удлиненных пластин, изготовленных из ферромагнитного материала и расположенных друг относительно друга таким образом, чтобы оставлять между собой некоторый свободный внутренний объем. Две пластины удерживаются параллельными между собой при помощи первого и второго фланцев 22, 24, установленных соответственно на концах упомянутых пластин. Фланцы также изготавливаются из ферромагнитного материала. В соответствии со специфическим вариантом реализации каркас 20, выполненный в форме параллелепипеда, содержит, по меньшей мере, две стороны, открытые в его внутренний объем.
В соответствии с другим примером реализации две упомянутые пластины и первый фланец 22 могут представлять собой одну и ту же деталь, полученную путем сгибания, механической обработки или спекания. Кроме того, упомянутые фланцы могут быть реализованы в виде пакета отформованных металлических листов для того, чтобы уменьшить наводимые в них электрические токи и связанные с ними потери. Эта система может иметь форму параллелепипеда или же может быть осесимметричной.
Этот электромагнитный приводной механизм содержит, по меньшей мере, одну фиксированную катушку 30 управления, предпочтительным образом установленную на изолирующем кожухе 32 внутри каркаса 20. Упомянутая, по меньшей мере, одна катушка проходит в осевом направлении между первым фланцем 22 и вторым фланцем 24.
Электромагнитный приводной механизм содержит подвижный сердечник 16, установленный с возможностью осевого скольжения вдоль направления продольной оси каркаса 20.
Подвижный сердечник 16 устанавливается внутри упомянутой катушки. Перемещение подвижного сердечника 16 осуществляется, таким образом, внутри катушки 30 управления между двумя положениями функционирования, называемыми в последующем изложении положением РА сцепления и положением РО расцепления.
Упомянутая по меньшей мере одна катушка 30 управления предназначена для создания в магнитном контуре, в положении РО расцепления, первого магнитного потока фС1 управления таким образом, чтобы перемещать подвижный сердечник 16 из положения РО расцепления в положение РА сцепления. Кроме того, по меньшей мере, одна катушка 30 предназначена для создания в магнитном контуре, в положении РА сцепления, второго магнитного потока фС2, способствующего перемещению подвижного сердечника 16 из положения РА сцепления в положение РО расцепления.
Предпочтительным образом подвижный сердечник 16 представляет собой цилиндр, изготовленный из ферромагнитного материала.
Первая радиальная поверхность цилиндра предназначена для того, чтобы находиться в контакте с первым фланцем 22 в том случае, когда сердечник располагается в положении функционирования, называемом положением РА сцепления. Первый осевой воздушный зазор е1 соответствует промежутку между первым фланцем 22 и подвижным сердечником 16. Этот воздушный зазор является максимальным в том случае, когда подвижный сердечник находится в своем положении РО расцепления, как это представлено на фиг. 1А. Этот воздушный зазор является нулевым или весьма малым в том случае, когда подвижный сердечник находится в своем положении РА сцепления, как это представлено на фиг. 1В.
Вторая радиальная поверхность цилиндра предпочтительным образом выполнена с возможностью располагаться по существу снаружи от объема, сформированного магнитным каркасом и фланцами в том случае, когда подвижный сердечник находится в положении функционирования, называемом положением РО расцепления.
Подвижный сердечник 16 содержит постоянный магнит 14. Этот постоянный магнит 14 может быть единственным и/или кольцевым, и/или он может быть сформирован несколькими имеющими форму параллелепипеда постоянными магнитами, размещенными рядом друг с другом по периферийной части сердечника. Толщина постоянного магнита калибруется таким образом, чтобы оптимизировать его магнитное действие, принимая во внимание, что его эффективность связана с отношением между его толщиной и протяженностями воздушных зазоров, присутствующих в магнитном контуре в том положении, для которого следует обеспечить его максимальную эффективность.
Постоянный магнит 14 предназначен для создания магнитного потока фU поляризации, создающего магнитную силу FA сцепления, удерживающую подвижный сердечник 16 в положении прижатия к первому фланцу 22 в том случае, когда этот подвижный сердечник находится в положении РА сцепления.
В том случае, когда подвижный сердечник 16 находится в положении РА сцепления, он удерживается в состоянии прижатия к первому фланцу 22 в результате действия магнитной силы FA сцепления, возникающей вследствие наличия магнитного потока фU поляризации, создаваемого постоянным магнитом 14. Подвижный сердечник 16 предназначен для восприятия воздействия, в положении РО расцепления, по меньшей мере, одной возвратной пружины 36. Возвратное усилие FR, создаваемое этой возвратной пружиной 36, стремится противодействовать магнитному усилию FA сцепления, создаваемому постоянным магнитом 14. В положении РА сцепления сила магнитного усилия FA сцепления представляет собой силу, превышающую силу противодействующего ему возвратного усилия, создаваемого, по меньшей мере, одной возвратной пружиной 36.
Для того, чтобы гарантировать определенный уровень устойчивости к ударам без разъединения магнитного контура, магнитное усилие FA сцепления обычно рассчитывается таким образом, чтобы противодействовать не только возвратному усилию FR, но также и усилиям расцепления, возникающим вследствие возможных ударов и/или ускорений, воздействию которых может подвергаться электромагнитный приводной механизм во включенном положении. Эти усилия расцепления, которые зависят от предполагаемого уровня стойкости к ударам и от масс, находящихся в движении, будут добавляться к возвратному усилию FR.
Подвижный магнитный сердечник 16 соединен с немагнитным элементом 18 приведения в действие, проходящим в осевом направлении через отверстие 17, выполненное в первом фланце 22. Подвижный сердечник 16 и элемент 18 приведения в действие образуют подвижную сборку электромагнитного приводного механизма 1. В качестве примера немагнитный элемент 18 приведения в действие выполнен с возможностью управления вакуумной колбой.
В соответствии с любыми вариантами реализации предлагаемого изобретения осевое положение постоянного магнита 14 на подвижном сердечнике 16 реализуется таким образом, чтобы в положении РО расцепления этот постоянный магнит находился, полностью или частично, за пределами фиксированного магнитного контура, используемого для протекания первого магнитного потока фС1 управления, создаваемого катушкой 30. При этом магнитный поток фU поляризации постоянного магнита не принимает участия, или принимает лишь весьма незначительное участие, в сцеплении электромагнитного приводного механизма, в частности в процессе перемещения подвижного сердечника 16 из положения РО расцепления в следующее положение РА сцепления.
Кроме того, в соответствии с любым вариантом реализации предлагаемого изобретения осевое положение постоянного магнита 14 на подвижном сердечнике 16 реализуется таким образом, чтобы этот постоянный магнит, в положении РА сцепления, находился полностью или частично внутри фиксированного магнитного контура, используемого для протекания магнитного потока фU поляризации, создаваемого постоянным магнитом 14. Магнитный поток фU поляризации постоянного магнита при этом эффективным образом используется для поддержания подвижного сердечника 16 в положении РА сцепления.
В соответствии с первым вариантом реализации, представленным на фиг. 1А-1В и 2А-2В, постоянный магнит 14 является намагниченным перпендикулярно относительно направлению перемещения упомянутого подвижного сердечника. Как это показано на фиг. 1А, постоянный магнит предпочтительным образом представлен располагающимся полностью за пределами магнитного контура, используемого для протекания первого магнитного потока фС1 управления. В соответствии с этим вариантом реализации упомянутый постоянный магнит находится снаружи по отношению к внутреннему объему магнитного каркаса. Такое относительное позиционирование постоянного магнита 14 по отношению к наружной поверхности второго фланца 24 обеспечивает возможность дозирования введения магнитного потока от постоянного магнита в фазе сцепления электромагнитного приводного механизма. В соответствии с этим вариантом реализации внутренняя поверхность второго фланца 24 содержит внутреннюю втулку 46, проходящую частично в кольцевом пространстве, выполненном коаксиальным образом вокруг подвижного сердечника 16. При этом подвижный сердечник 16 отделен от упомянутой втулки 46 вторым скользящим радиальным воздушным зазором е2, остающимся по существу одинаковым в процессе поступательного перемещения подвижного сердечника 16. Предпочтительным образом втулка 46, в положении РА сцепления, перекрывает подвижный сердечник 16 на некотором расстоянии L перекрытия. Эта втулка 46 предпочтительным образом имеет трубчатую форму и изготавливается из ферромагнитного материала. При этом она может представлять собой неотъемлемую часть фланца или может быть прикреплена к этому фланцу при помощи тех или иных средств крепления. Скользящий воздушный зазор е2 и расстояние L перекрытия между подвижным сердечником 16 и втулкой 46 выбираются таким образом, чтобы магнитное сопротивление системы, представляющей собой магнитный контур 20, было возможно меньшим, причем на всей протяженности рабочего хода подвижного сердечника 16 между двумя его положениями функционирования. Кроме того, имея целью оптимизировать функционирование постоянного магнита в положении РА сцепления, упомянутое расстояние L должно обеспечивать возможность полного перекрытия этого постоянного магнита в данном положении. В соответствии с вариантом реализации предлагаемого изобретения возвратная пружина 36 предпочтительным образом размещается снаружи по отношению к магнитному каркасу 20. Эта возвратная пружина содержит первую опорную поверхность, которая опирается на первую наружную опорную поверхность 100 магнитного каркаса, и содержит вторую опорную поверхность, которая опирается на упор 19, размещенный на органе 18 приведения в действие. В положении РО расцепления этот упор 19 опирается на вторую наружную опору. В качестве примера реализации эта вторая наружная опора может представлять собой, в частности, наружную поверхность первого фланца 22. Такое продольное позиционирование упора 19 на органе 18 приведения в действие позволяет контролировать протяженность перемещения подвижной системы электромагнитного приводного механизма 1. Удержание этого приводного механизма в положении расцепления обеспечивается при помощи возвратной пружины.
Упомянутая по меньшей мере одна катушка 30 выполнена с возможностью создавать в магнитном контуре, в положении РО расцепления, первый магнитный поток фС1 управления, который стремится противостоять действию возвратной пружины 36 таким образом, чтобы перемещать подвижный сердечник 16 из положения РО расцепления в положение РА сцепления. На фиг. 1А и 1В представлены соответственно, с одной стороны, электромагнитный приводной механизм в начале фазы сцепления, а с другой стороны, в конце этой фазы сцепления.
Упомянутая по меньшей мере одна катушка 30 выполнена с возможностью создавать в магнитном контуре, в положении РА сцепления, второй магнитный поток фС2 управления, который противодействует магнитному потоку фU поляризации постоянного магнита 14 таким образом, чтобы освобождать подвижный сердечник 16 и обеспечивать возможность его перемещения из положения РА сцепления в положение РО расцепления. На фиг. 2А и 2В представлены соответственно электромагнитный приводной механизм, с одной стороны, в начале фазы расцепления, а с другой стороны, в конце фазы расцепления. Перемещение подвижного сердечника 16 из положения РА сцепления в положение РО расцепления осуществляется под действием, по меньшей мере, одной возвратной пружины 36.
В соответствии с вариантом осуществления первого варианта реализации, представленным на фиг. 3А и 3В, постоянный магнит 14 с радиальным направлением намагничивания позиционируется за пределами фиксированного магнитного контура, используемого для протекания первого магнитного потока фС1 управления, будучи размещенным при этом внутри внутреннего объема магнитного каркаса. Магнитный поток фU поляризации постоянного магнита не принимает участия, или принимает весьма малое участие, в сцеплении электромагнитного приводного механизма, в частности в перемещении подвижного сердечника 16 из положения РО расцепления в последующее положение РА сцепления. В соответствии с этим вариантом реализации упомянутый постоянный магнит всегда находится внутри внутреннего объема магнитного каркаса 20 электромагнитного приводного механизма при любом положении функционирования подвижного сердечника. В положении сцепления и в положении расцепления этот постоянный магнит оказывается, таким образом, защищенным от внешних воздействий. Поперечное сечение подвижного сердечника, которое вступает в контакт с магнитным контуром в положении сцепления, оказывается уменьшенным по сравнению с остальным поперечным сечением этого сердечника. Магнитное сопротивление магнитного контура в положении сцепления оказывается, таким образом, уменьшенным, что позволяет повысить эффективность электромагнитного приводного механизма, уменьшая энергию расцепления и сцепления. Размер поверхности контакта между подвижным сердечником и первым фланцем оказывается, таким образом, адаптируемым в зависимости от конкретных потребностей.
В соответствии со вторым вариантом первого варианта реализации, представленным на фиг. 6, в положении РО расцепления меньшая часть постоянного магнита частично позиционирована в магнитном контуре, используемом для протекания магнитного потока фС1 управления. Эта меньшая часть постоянного магнита располагается внутри внутреннего объема магнитного каркаса. Кроме того, постоянный магнит предпочтительным образом частично представлен в магнитном контуре таким образом, чтобы магнитный поток фU поляризации постоянного магнита протекал в магнитном контуре и принимал, таким образом, участие в сцеплении электромагнитного приводного механизма 1.
В соответствии с другим вариантом первого варианта реализации, представленным на фиг. 7, постоянный магнит 14 устанавливается, в положении РА сцепления, таким образом, чтобы часть второго магнитного потока фС2 управления катушки противодействовала магнитному потоку фU поляризации постоянного магнита 14, при этом не пересекая этот магнитный поток. При этом эффективность катушки 30 управления повышается. Меньшая часть постоянного магнита не располагается в магнитном контуре, используемом для протекания второго магнитного потока фС2 управления. Как это представлено на упомянутом чертеже, в положении РА сцепления часть втулки 46 проходит за пределами постоянного магнита. Этот вариант реализации, однако, облегчает локальное повторное замыкание магнитного потока фU поляризации постоянного магнита 14, снижая, таким образом, его эффективность. Кроме того, в соответствии с непредставленным здесь специфическим вариантом осуществления этого варианта реализации часть втулки 46, проходящая за пределами постоянного магнита, отделена от подвижного сердечника скользящим воздушным зазором, толщина которого может регулироваться. Этот регулируемый воздушный зазор позволяет, в частности, устранить короткое замыкание магнитного потока от постоянного магнита в том случае, когда подвижный сердечник находится в положении РА сцепления.
Все описанные выше варианты реализации могут быть применены независимо друг от друга или одновременно.
В соответствии со вторым вариантом реализации предлагаемого изобретения, проиллюстрированным на фиг. 4А и 4В, постоянный магнит 14 представляет собой магнит с направлением намагничивания, ориентированным вдоль направления перемещения подвижного сердечника. Этот постоянный магнит представлен полностью за пределами магнитного контура, используемого для протекания первого магнитного потока фС1 управления. В соответствии с этим способом реализации упомянутый постоянный магнит предпочтительным образом размещается снаружи от внутреннего объема магнитного каркаса. Такое относительное позиционирование постоянного магнита 14 по отношению к наружной поверхности второго фланца 24 обеспечивает возможность дозирования вклада магнитного потока от постоянного магнита в фазе сцепления электромагнитного приводного механизма. В соответствии с этим вариантом реализации внутренняя поверхность второго фланца 24 содержит внутреннюю втулку 46, частично проходящую в кольцевом пространстве, выполненном коаксиальным образом вокруг подвижного сердечника 16. Этот подвижный сердечник 16 отделен от втулки 46 вторым скользящим радиальным воздушным зазором е2, остающимся по существу постоянным в процессе поступательного перемещения подвижного сердечника 16.
Предпочтительным образом, и как это представлено на фиг. 4В, втулка 46, в положении РА сцепления, перекрывает подвижный сердечник 16 на некотором расстоянии L перекрытия. Эта втулка 46 предпочтительным образом имеет трубчатую форму и изготавливается из ферромагнитного материала. Эта втулка может представлять собой неотъемлемую часть фланца или может быть закреплена на этом фланце при помощи тех или иных средств крепления. Скользящий воздушный зазор е2 и расстояние перекрытия L между подвижным сердечником 16 и втулкой 46 регулируются таким образом, чтобы первый магнитный поток фС1 управления, создаваемый катушкой, не проходил через постоянный магнит в процессе любой фазы сцепления, то есть в том случае, когда подвижный сердечник проходит из положения РО расцепления в положение РА сцепления.
В соответствии с вариантом осуществления второго варианта реализации, как это представлено на фиг. 5А и 5В, постоянный магнит 14, имеющий осевое направление намагниченности, позиционируется за пределами фиксированного магнитного контура, используемого для протекания первого магнитного потока фС1 управления, будучи размещенным внутри внутреннего объема магнитного каркаса. При этом магнитный поток фU поляризации от постоянного магнита не участвует, или участвует весьма незначительно, во включении электромагнитного приводного механизма, в частности в перемещении подвижного сердечника 16 из положения РО расцепления в положение РА сцепления. В соответствии с этим вариантом реализации постоянный магнит всегда располагается внутри внутреннего объема магнитного каркаса 20 электромагнитного приводного механизма при любом положении функционирования подвижного сердечника. В положении РА сцепления и в положении РО расцепления постоянный магнит оказывается, таким образом, защищенным от внешних воздействий. Поперечное сечение подвижного сердечника, которое входит в контакт с магнитным контуром в положении включения, оказывается уменьшенным по сравнению с основным поперечным сечением этого подвижного сердечника. Магнитное сопротивление магнитного контура в положении сцепления оказывается при этом уменьшенным, что позволяет повысить эффективность электромагнитного приводного механизма, уменьшая энергию расцепления и сцепления. Величина поверхности контакта между подвижным сердечником и первым фланцем оказывается при этом адаптируемой в зависимости от конкретных потребностей. Для того чтобы не увеличивать магнитное сопротивление подвижного сердечника 16 и не снижать энергетическую эффективность электромагнитного приводного механизма, подвижный сердечник содержит магнитный шунт. Другими словами, в данном случае постоянный магнит образован кольцом или диском, имеющим поперечное сечение, меньшее, чем поперечное сечение подвижного сердечника. Кроме того, факт наличия магнитного шунта существенно снижает опасность размагничивания этого постоянного магнита.
В соответствии с непредставленным на приведенных в приложении чертежах вариантом осуществления первого и второго вариантов реализации постоянный магнит предпочтительным образом заменяется участком поддающегося намагничиванию материала, такого, например, как твердая сталь марки ALNICO.
Предлагаемое изобретение относится также к устройству 22 разъединения, содержащему электромагнитный приводной механизм 1 определенного выше типа. Как это представлено на фиг. 12 в качестве примера реализации, устройство 22 разъединения представляет собой выключатель, содержащий, в частности, по меньшей мере, одну колбу 2. Эта колба 2 может представлять собой вакуумную колбу или классическую камеру разъединения выключателя. Для перехода из положения расцепления к положению сцепления контактов упомянутой, по меньшей мере, одной колбы 2 функционирование электромагнитного приводного механизма 1 происходит следующим образом. Первое усилие FR расцепления, приложенное возвратной пружиной 36 к подвижному сердечнику 16 посредством немагнитного элемента 18 приведения в действие, стремится удерживать подвижный сердечник 16 в положении расцепления, причем контакты в этом случае находятся в разомкнутом положении. В том случае, когда на катушку 30 подается электрическое питание, эта катушка создает первый магнитный поток фС1 управления, вызывающий возникновение электромагнитного усилия сцепления. Как только усилие сцепления превысит первое усилие FR расцепления, подвижный сердечник 16 перемещается из положения РО расцепления к положению РА сцепления. В конце определенной части своего рабочего хода, соответствующей расцеплению контактов, этот подвижный сердечник сталкивается с вторым усилием FP расцепления, соответствующим усилию давления, приложенного к контактам упомянутой по меньшей мере одной колбы 2. При этом подвижный сердечник должен будет сжать эти пружины 37 давления контакта на оставшейся части своего рабочего хода для того, чтобы достигнуть своего положения РА сцепления, соответствующего предохранению контактов от износа. Энергия, запасенная подвижным сердечником в процессе его перемещения из положения расцепления в положение столкновения полюсных контактов, должна быть достаточной для того, чтобы гарантировать свободное (без остановки) замыкание контактов с тем, чтобы исключить опасность сваривания этих контактов. Именно поэтому соответствующие величины второго усилия FR расцепления, рабочего хода расцепления и электрической мощности, подаваемой в катушку, должны быть оптимизированы таким образом, чтобы обеспечить это свободное включение сердечника.
В том случае, когда подвижный сердечник 16 находится в положении РА сцепления, как это представлено, например, на фиг. 1В, питание катушки прекращается. Магнитное усилие FA сцепления, возникающее вследствие магнитного потока фU поляризации постоянного магнита 14, при этом имеет интенсивность, превышающую сумму возвратных усилий, связанных с первым и вторым усилиями расцепления FR и FP.
Магнитное усилие FA сцепления обычно рассчитывается таким образом, чтобы, с одной стороны, противодействовать первому и второму усилиями расцепления FR и FP, а с другой стороны, противодействовать усилиям отсоединения, связанным с ударами, испытываемыми этим электромагнитным приводным механизмом в сцепленном положении. Эти усилия отсоединения будут добавляться к первому и второму усилиями расцепления FR и FP.
Для того, чтобы перейти из положения замыкания в положение расцепления контактов упомянутой, по меньшей мере, одной колбы 2, или, другими словами, перейти из положения РА сцепления в положение РО расцепления подвижного сердечника 16, функционирование электромагнитного приводного механизма 1 происходит следующим образом. Два противодействующих друг другу усилия прикладываются к подвижному сердечнику 16, а именно магнитное усилие сцепления FA, возникающее вследствие наличия магнитного потока фU поляризации постоянного магнита 14 и суммы усилий FR и FP расцепления, результирующей усилия, прикладываемые возвратными пружинами 36, и давление полюсных контактов 37. Магнитное усилие FA сцепления имеет при этом силу, превышающую силу усилий FR + FP расцепления.
При этом запитывается катушка 30 управления для того, чтобы создать второй магнитный поток управления. Второй магнитный поток управления протекает в направлении, противоположном направлению циркуляции потока фU поляризации постоянного магнита 14, для того, чтобы уменьшить, таким образом, магнитное усилие FA сцепления. При этом как только результирующее усилие (FR + FP) расцепления становится превышающим магнитное усилие FA сцепления, подвижный сердечник 16 перемещается из положения РА сцепления в положение РО расцепления, вызывая тем самым разъединение контактов. Это разъединение осуществляется свободным и непрерывным образом вследствие того, что геометрические характеристики электромагнитного приводного механизма не представляют никакого промежуточного устойчивого положения.
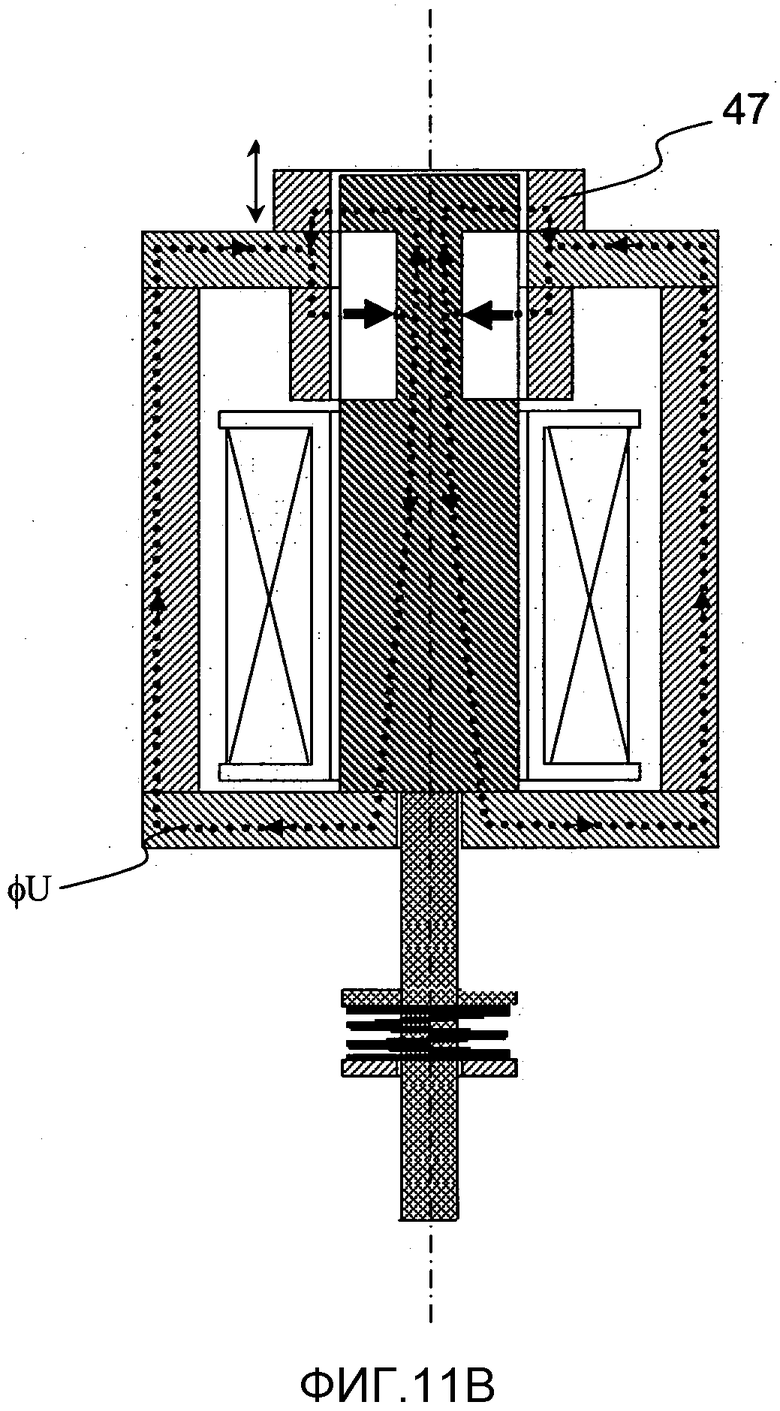
В соответствии с вариантом реализации, представленным на чертежах 11А и 11В, электромагнитный приводной механизм содержит подвижную втулку 47, изготовленную из ферромагнитного материала. Продольная ось этой втулки совпадает с осью подвижного сердечника 16. Как это представлено на фиг. 11А, упомянутая втулка устанавливается в своем первом положении функционирования таким образом, чтобы не составлять часть магнитного контура и так, чтобы магнитный поток фU поляризации постоянного магнита 14 не протекал через эту втулку в том случае, когда этот электромагнитный приводной механизм находится в своем положении РО расцепления.
Как это представлено на фиг. 11В, упомянутая втулка также может быть установлена в свое второе положение функционирования таким образом, чтобы она составляла часть магнитного контура в том случае, когда этот электромагнитный приводной механизм находится в своем положении РА сцепления. В качестве примера реализации эта подвижная втулка 47 располагается в этом своем втором положении в упоре в наружную поверхность второго фланца 24. В этом втором положении упомянутая втулка позволяет отводить часть магнитного потока от постоянного магнита 14, снижая, таким образом, его эффективность на уровне удержания подвижного сердечника 16 в его положении РА сцепления и обеспечивая тем самым возможность перемещения этого подвижного сердечника 16 из его положения РА сцепления в его положение РО расцепления. Перемещение подвижной втулки 47 может быть инициировано посредством управляемого вручную механизма в том случае, когда энергия, необходимая для повторного выключения электромагнитного приводного механизма, не подается. Перемещение этой подвижной втулки 47 также может быть реализовано при помощи электромагнитного приводного механизма. Катушка этого электромагнитного приводного механизма может управляться вместо катушки 30 для того, чтобы реализовать расцепление подвижного сердечника.
В случае управления, по меньшей мере, одной вакуумной колбой или одним выключателем при помощи основного электромагнитного приводного механизма, представляющего собой объект данной патентной заявки, второй электромагнитный приводной механизм, позволяющий обеспечить перемещение упомянутой втулки, также может быть управляемым в случае дефекта типа перегрузки или короткого замыкания в электрической установке, защищаемой при помощи, по меньшей мере, одной колбы или выключателя.
В соответствии с другим вариантом реализации, представленным на фиг. 9, немагнитный кожух устанавливается на уровне наружной поверхности второго фланца 24 таким образом, чтобы обеспечить защиту постоянного магнита от металлической пыли или пыли другого происхождения.
В соответствии с еще одним вариантом реализации, представленным на фиг. 8, поперечное сечение подвижного сердечника 16 на его конце, располагающемся со стороны первого фланца 22, может быть уменьшенным на небольшой высоте с целью увеличения усилия удержания, связанного с постоянным магнитом 14. Это уменьшение может быть осуществлено на оси подвижного сердечника или на его периферийной части. Специфическая локализация этого уменьшения поперечного сечения подвижного сердечника позволяет повысить усилие прижатия этого подвижного сердечника 16 без снижения его эффективности в процессе его движения соединения из положения РО расцепления в положение РА сцепления.
В соответствии с еще одним вариантом реализации, представленным на фиг. 10, электромагнитный приводной механизм содержит фиксированный сердечник 67, размещенный внутри внутреннего объема магнитного каркаса напротив внутренней поверхности первого фланца 22. Этот фиксированный сердечник, изготовленный из ферромагнитного материала, может составлять, или же не составлять, неотъемлемую часть этого фланца. Этот фиксированный сердечник 67, обеспечивая концентрацию магнитного потока катушки управления, повышает ее эффективность.
В соответствии с любым способом реализации сердечник может представлять форму параллелепипеда. Кроме того, электромагнитный приводной механизм может содержать геометрические элементы, имеющие асимметричные формы.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТНОЕ ПРИВОДНОЕ УСТРОЙСТВО | 2014 |
|
RU2651933C2 |
| МЕХАНИЗМ ДЛЯ УВЕЛИЧЕНИЯ ЖЕСТКОСТИ ДЛЯ ПОДШИПНИКА НА МАГНИТНОЙ ПОДВЕСКЕ, ПОДШИПНИК НА МАГНИТНОЙ ПОДВЕСКЕ И НАСОС ДЛЯ КРОВИ | 2020 |
|
RU2772509C1 |
| Электромагнитное приводное устройство | 1978 |
|
SU750377A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД С ДВУМЯ УСТОЙЧИВЫМИ СОСТОЯНИЯМИ ДЛЯ СРЕДНЕВОЛЬТНОГО АВТОМАТИЧЕСКОГО ВЫКЛЮЧАТЕЛЯ | 2010 |
|
RU2540114C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СТЕРЖНЯМИ В ЯДЕРНОМ РЕАКТОРЕ | 2010 |
|
RU2578172C2 |
| Электропривод стрелочного перевода | 1987 |
|
SU1527061A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД | 2002 |
|
RU2235383C1 |
| ВЫСОКОТЕМПЕРАТУРНАЯ ПРИВОДНАЯ СИСТЕМА ДЛЯ МАССОВОГО РАСХОДОМЕРА КОРИОЛИСА | 1999 |
|
RU2238525C2 |
| ЭЛЕКТРОМАГНИТНЫЙ ИСПОЛНИТЕЛЬНЫЙ ЭЛЕМЕНТ УПРАВЛЕНИЯ, В ЧАСТНОСТИ, ДЛЯ ВЫКЛЮЧАТЕЛЯ СРЕДНЕГО НАПРЯЖЕНИЯ | 2007 |
|
RU2410783C2 |
| СПОСОБ ФИКСАЦИИ И ПРИВОДА РИГЕЛЯ ЗАМКА И МАГНИТОЭЛЕКТРИЧЕСКИЙ ЗАМОК (ВАРИАНТЫ) | 2010 |
|
RU2487225C2 |


Изобретение относится к электромагнитному приводному механизму, содержащему сердечник (16), подвижный между положением сцепления и положением расцепления, постоянный магнит (14), катушку (30), выполненную с возможностью создания первого магнитного потока управления, для перемещения подвижного сердечника (16) из положения расцепления в положение сцепления, и второго магнитного потока управления, содействующего перемещению подвижного сердечника (16) из положения сцепления в положение расцепления. Постоянный магнит (14) расположен на подвижном сердечнике (16) таким образом, чтобы находиться, по меньшей мере частично, за пределами фиксированного магнитного контура, в котором протекает первый магнитный поток управления, в положении расцепления и чтобы находится, по меньшей мере частично, внутри фиксированного магнитного контура, используемого для протекания магнитного потока поляризации постоянного магнита (14), в положении сцепления. Техническим результатом является повышение энергетического коэффициента полезного действия. 2 н. и 22 з.п.ф-лы,18 ил.
1. Электромагнитный приводной механизм с магнитным сцеплением, содержащий:
- подвижный сердечник (16), установленный с возможностью осевого скольжения вдоль продольной оси (Y) внутри магнитного каркаса (20) между положением (РА) сцепления и положением (РО) расцепления;
- по меньшей мере, один постоянный магнит (14);
- по меньшей мере, одну катушку (30), проходящую в осевом направлении вдоль продольной оси (Y) каркаса (20) и выполненную с возможностью создания:
- первого магнитного потока (фС1) управления, для перемещения подвижного сердечника (16) из положения (РО) расцепления в положение (РА) сцепления;
- второго магнитного потока (фС2) управления, противодействующего магнитному потоку (фU) поляризации постоянного магнита (14) и обеспечивающего возможность перемещения подвижного сердечника (16) из положения (РА) сцепления в положение (РО) расцепления,
отличающийся тем, что постоянный магнит (14) расположен на подвижном сердечнике (16) таким образом, чтобы:
- находиться, по меньшей мере частично, за пределами фиксированного магнитного контура, в котором протекает первый магнитный поток (фС1) управления, в том случае, когда подвижный сердечник (16) находится в положении (РО) расцепления,
- и находиться, по меньшей мере частично, внутри фиксированного магнитного контура, используемого для протекания магнитного потока (фU) поляризации, создаваемого постоянным магнитом (14), в том случае, когда подвижный сердечник (16) находится в положении (РА) сцепления.
2. Электромагнитный приводной механизм по п.1, отличающийся тем, что постоянный магнит (14) является намагниченным в радиальном направлении, перпендикулярном к продольной оси (Y) каркаса (20).
3. Электромагнитный приводной механизм по пп.1 или 2, отличающийся тем, что каркас (20) содержит внутреннюю втулку (46), проходящую вокруг подвижного сердечника (16), причем постоянный магнит (14) расположен на подвижном сердечнике (16) таким образом, чтобы находиться, по меньшей мере частично, напротив внутренней втулки (46) магнитного каркаса, в том случае, когда этот подвижный сердечник (16) находится в положении (РА) сцепления.
4. Электромагнитный приводной механизм по п. 3, отличающийся тем, что внутренняя втулка (46) проходит на расстоянии (L) перекрытия с размещенным напротив нее в положении (РА) сцепления постоянным магнитом (14).
5. Электромагнитный приводной механизм по п. 3, отличающийся тем, что внутренняя втулка (46) отделена от подвижного сердечника (16) при помощи скользящего радиального воздушного зазора (е2), остающегося одинаковым в процессе поступательного перемещения этого подвижного сердечника (16).
6. Электромагнитный приводной механизм по п. 4, отличающийся тем, что внутренняя втулка (46) отделена от подвижного сердечника (16) при помощи скользящего радиального воздушного зазора (е2), остающегося одинаковым в процессе поступательного перемещения этого подвижного сердечника (16).
7. Электромагнитный приводной механизм по п.1, отличающийся тем, что постоянный магнит (14) является намагниченным в осевым направлением вдоль продольной оси (Y) каркаса (20).
8. Электромагнитный приводной механизм по любому из предшествующих пп.1, 2, 4, 5, 6, 7, отличающийся тем, что постоянный магнит (14) расположен на подвижном сердечнике (16) таким образом, чтобы полностью находиться снаружи по отношению к магнитному каркасу (20), в том случае, когда подвижный сердечник (16) находится в своем положении (РО) расцепления.
9. Электромагнитный приводной механизм по п.3, отличающийся тем, что постоянный магнит (14) расположен на подвижном сердечнике (16) таким образом, чтобы полностью находиться снаружи по отношению к магнитному каркасу (20), в том случае, когда подвижный сердечник (16) находится в своем положении (РО) расцепления.
10. Электромагнитный приводной механизм по п.7, отличающийся тем, что содержит подвижную втулку (47), которая может быть приведена в действие вручную или посредством электромеханического приводного механизма.
11. Электромагнитный приводной механизм по любому из пп.1, 2, 4, 5, 6, 7, отличающийся тем, что постоянный магнит (14) расположен на подвижном сердечнике (16) таким образом, чтобы полностью располагаться внутри магнитного каркаса (20), в том случае, когда подвижный сердечник (16) находится в положении (РО) расцепления.
12. Электромагнитный приводной механизм по п.3, отличающийся тем, что постоянный магнит (14) расположен на подвижном сердечнике (16) таким образом, чтобы полностью располагаться внутри магнитного каркаса (20), в том случае, когда подвижный сердечник (16) находится в положении (РО) расцепления.
13. Электромагнитный приводной механизм по любому из предшествующих пп.1, 2, 4, 5, 6, 7, 9, 10, 12, отличающийся тем, что этот механизм содержит кожух (57), изготовленный из неферромагнитного материала и расположенный на уровне наружной поверхности магнитного каркаса (20) таким образом, чтобы перекрывать весь подвижный сердечник (16) в положении (РО) расцепления.
14. Электромагнитный приводной механизм по п.3, отличающийся тем, что этот механизм содержит кожух (57), изготовленный из неферромагнитного материала и расположенный на уровне наружной поверхности магнитного каркаса (20) таким образом, чтобы перекрывать весь подвижный сердечник (16) в положении (РО) расцепления.
15. Электромагнитный приводной механизм по п.8, отличающийся тем, что этот механизм содержит кожух (57), изготовленный из неферромагнитного материала и расположенный на уровне наружной поверхности магнитного каркаса (20) таким образом, чтобы перекрывать весь подвижный сердечник (16) в положении (РО) расцепления.
16. Электромагнитный приводной механизм по п.11, отличающийся тем, что этот механизм содержит кожух (57), изготовленный из неферромагнитного материала и расположенный на уровне наружной поверхности магнитного каркаса (20) таким образом, чтобы перекрывать весь подвижный сердечник (16) в положении (РО) расцепления.
17. Электромагнитный приводной механизм по любому из предшествующих пп.1, 2, 4, 5, 6, 7, 9, 10, 12, 14, 15, 16, отличающийся тем, что подвижный сердечник (16) содержит радиальную поверхность, выполненную с возможностью прижатия к магнитному каркасу (20) в положении (РА) сцепления, причем упомянутая поверхность является меньшей, чем среднее поперечное сечение этого сердечника.
18. Электромагнитный приводной механизм по п.3, отличающийся тем, что подвижный сердечник (16) содержит радиальную поверхность, выполненную с возможностью прижатия к магнитному каркасу (20) в положении (РА) сцепления, причем упомянутая поверхность является меньшей, чем среднее поперечное сечение этого сердечника.
19. Электромагнитный приводной механизм по п.8, отличающийся тем, что подвижный сердечник (16) содержит радиальную поверхность, выполненную с возможностью прижатия к магнитному каркасу (20) в положении (РА) сцепления, причем упомянутая поверхность является меньшей, чем среднее поперечное сечение этого сердечника.
20. Электромагнитный приводной механизм по п.11, отличающийся тем, что подвижный сердечник (16) содержит радиальную поверхность, выполненную с возможностью прижатия к магнитному каркасу (20) в положении (РА) сцепления, причем упомянутая поверхность является меньшей, чем среднее поперечное сечение этого сердечника.
21. Электромагнитный приводной механизм по п.13, отличающийся тем, что подвижный сердечник (16) содержит радиальную поверхность, выполненную с возможностью прижатия к магнитному каркасу (20) в положении (РА) сцепления, причем упомянутая поверхность является меньшей, чем среднее поперечное сечение этого сердечника.
22. Электромагнитный приводной механизм по любому из предшествующих пп.1, 2, 4, 5, 6, 7, 9, 10, 12, 14, 15, 16, 18, 19, 20, 21, отличающийся тем, что содержит, по меньшей мере, одну возвратную пружину (36), противодействующую перемещению упомянутого сердечника из его положения (РО) расцепления в его положение (РА) сцепления.
23. Электромагнитный приводной механизм по любому из предшествующих пп.1, 2, 4, 5, 6, 7, 9, 10, 12, 14, 15, 16, 18, 19, 20, 21, отличающийся тем, что подвижный магнитный сердечник (16) соединен с приводным немагнитным элементом (18), проходящим вдоль продольной оси (Y).
24. Устройство (22) разъединения, содержащее, по меньшей мере, один неподвижный контакт, взаимодействующий с, по меньшей мере, одним подвижным контактом, выполненным с возможностью коммутировать питание электрической нагрузки, отличающееся тем, что это устройство содержит, по меньшей мере, один приводной электромагнитный механизм (1) по любому из предшествующих пп.1-23 для того, чтобы приводить в действие упомянутый, по меньшей мере, один подвижный контакт.
| ПНЕВМАТИЧЕСКИЙ УПРУГИЙ ЭЛЕМЕНТ | 2006 |
|
RU2325567C1 |
| Металлическая пустотелая балка, в частности для летательных аппаратов | 1926 |
|
SU6941A1 |
| ПРИВОД ВЫКЛЮЧАТЕЛЯ | 0 |
|
SU190964A1 |
| ЭЛЕКТРОДВИГАТЕЛЬНЫЙ ПРИВОД ВЫКЛЮЧАТЕЛЯ | 0 |
|
SU258417A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Шпаклевка | 1979 |
|
SU867903A1 |
| US 6373675 B1, 16.04.2002 | |||

