Заявляемое изобретение относится к авиационной технике, в частности беспилотным летательным аппаратам (БПЛА), предназначенным для нейтрализации малоразмерных воздушных целей.
Небольшие дроны-нарушители сложно идентифицировать, их поражение существующими зенитными средствами экономически нецелесообразно, радиоэлектронные средства подавления имеют свои ограничения и не всегда эффективны. Решением этой проблемы являются БПЛА-перехватчики для кинетического воздействия на дрон-нарушитель.
Известно устройство квадрокоптер «Interceptor» для уничтожения других дронов, представленный в 2019 году военно-техническим стартапом Anduril Industries (Сайт производителя https://www.anduril.com/news/2019/10/4/nbc-news-inside-anduril-the-startup-that-is-building-ai-powered-military-technology, дата скриншота 16.01.2020). «Interceptor» выслеживает, сканируя пространство с помощью системы компьютерного зрения, обнаружив цель, запрашивает у оператора-человека разрешение на атаку и затем идёт на контактный перехват.
Недостатком указанного устройства является то, что при столкновении «Interceptor» может потерять управляемость и разрушиться при падении.
Известна «Самонаводящаяся ракета» (Патент RU2015151254 A, МПК F42B 15/01, 07.03.2018.), содержащая корпус с головкой самонаведения и электрический реактивный движитель (ЭРД), предназначенная для перехвата ракет и дронов в непосредственной близости от объектов обороны.
Недостатком самонаводящейся электроракеты является её одноразовость использования, что ведет к избыточным расходам для поражения относительно недорогих дронов на коммерческих платформах, не предусмотрен длительный полет и мониторинг охраняемой территории.
Наиболее близким аналогом по технической сущности является устройство перехватчик DroneBullet от канадской компании AerialX (Сайт производителя https://www.aerialx.com/defeat.shtml, дата скриншота 16.01.2020). Перехватчик имеет компактный цилиндрический корпус с ударной частью в виде усиленного головного обтекателя и четыре винтомоторные группы. При помощи сигнала от встроенной камеры оператор наводит на цель DroneBullet, столкновение перехватчика и дрона-нарушителя приводит к их взаимному разрушению.
К недостаткам указанного устройства следует отнести то, что дистанционно управляемый оператором и небольшой по площади фронтальной проекции DroneBullet может быть применен только против малоподвижной цели, перехватчик используется исключительно как «дрон-камикадзе» с последующим саморазрушением, что представляет опасность в местах скопления людей, «одноразовость» применения экономически не целесообразна, нельзя подтвердить результаты атаки с борта перехватчика, а так же продолжить нейтрализацию других дронов-нарушителей.
Задачей предлагаемого изобретении является разработка БПЛА-перехватчика многоразового использования, эффективно поражающего посредством кинетического удара по воздушной малоразмерной цели, при этом БПЛА-перехватчик не теряет возможности выполнения полетной программы и самостоятельно возвращается на базу.
Еще одной задачей настоящего изобретения, в отличие от аналога является разработка новой конструкции ударной части, позволяющего корпусу БПЛА в момент перехвата находиться вне зоны контактного столкновения с целью.
Другой задачей настоящего изобретения, в отличие от аналога является повышение шансов гарантированного поражения цели за счет возможности выполнения ударной части с площадью фронтальной проекции значительно превышающей площадь фронтальной проекции корпуса БПЛА.
Еще одной задачей настоящего изобретения, является разработка новой конструкции ударной части обеспечивающей возможность установки сетки для ловли дрона-нарушителя и при этом сетка четко позиционирована в полете относительно корпуса за счет того, что сетка удерживается на ударной части.
Другой задачей настоящего изобретения, является сведение к минимуму критических перегрузок, передающихся на корпус БПЛА-перехватчик через ударную часть при столкновении с дроном-нарушителем.
Задачей настоящего изобретения, является возможность применить сбалансированную автоматику для компенсации импульса отката подвижных после удара при помощи противомассы.
Еще одной задачей настоящего изобретения, является возможность независимо от скорости сближения корпуса БПЛА-перехватчика и дрона-нарушителя выборочно изменять в известных пределах скорость столкновения ударной части с дроном-нарушителем, тем самым задавать уровень последующих повреждений цели.
Другой задачей настоящего изобретения, является многоцелевое назначение БПЛА-перехватчика благодаря разным режимам выборочного воздействия на цель: от полного разрушение дрона-нарушителя за счет ударного эффекта при перехвате на большой скорости, выведение из строя и удержание в воздухе колющим ударом по типу «гарпун», захват в воздухе без повреждения цели за счет удерживающей сетки.
Другие задачи и преимущества настоящего изобретения станут более очевидными ниже в описании и чертежах.
Технический результат - расширение арсенала и функциональных возможностей БПЛА-перехватчиков применяемых для предупреждения несанкционированного проникновения дронов-нарушителей.
Указанный технический результат достигается тем, что предлагаемый многоцелевой БПЛА-перехватчик для кинетического воздействия посредством столкновения с малоразмерной воздушной целью, состоящий из корпуса для размещения оборудования и полезной нагрузки, движителя, посадочного шасси, системы управления и навигации, системы наведения на цель, при этом, на корпусе в качестве полезной нагрузки установлен по меньшей мере, один таран с ударной частью, таран представлен в виде отдельного конструктивного элемента и подвижно соединен с корпусом посредством устройства поглощения энергии удара, устройство поглощения энергии удара представлено шарниром с демпфирующим устройством, ударная часть тарана перед столкновением с целью выступает за габариты корпуса на расстояние F, система наведения выполнена с возможностью обеспечить перехват цели за счет контактного пересечения траектории движения цели с траекторией движения ударной части тарана, выступающей за габариты корпуса, при этом система наведения дополнительно в момент перехвата обеспечивает бесконтактный пролет корпуса БПЛА-перехватчика рядом с целью на расстоянии R, меньшем чем расстояние F.
БПЛА–перехватчик может быть представлен в виде мультикоптера, самолета, конвертоплана, летающего крыла, вертолета или другим известным устройством. Корпус служит для установки оборудования и полезной нагрузки и может быть представлен планером, фюзеляжем, рамой или другим известным устройством. При необходимости корпус БПЛА может быть трансформируемым например, со складывающимися лучами рамы с винтами или убирающимся в фюзеляж посадочным шасси, в корпусе или крыле могут быть выполнены отсеки для хранения тарана. В варианте выполнения Н-образной формы корпуса выполняется установка тарана в центральной части корпуса и может обеспечиваться вращение тарана на 360 градусов. Дополнительно на корпусе БПЛА для установки устройства поглощения энергии удара могут быть выполнены опорные элементы, направляющие, ограничители, фиксаторы, соединения или другие известные элементы. Предпочтительно для взлета и посадки на корпусе БПЛА выполнено шасси или установлена парашютная система посадки или выполнено другое известное взлетно-посадочное устройство. В корпусе может быть установлена система электронной стабилизации, анализа работы бортовых устройств, внешних нагрузок и корпус может снабжаться гироскопами, бародатчиком, автопилотом, акселерометром, контроллерами, сонаром, GPS-приемником и другими известными устройствами. Для распознавания «свой-чужой» может быть установлен радиомаяк.
Малоразмерные воздушные цели - это дроны-нарушители любого типа, которые совершают несанкционированный пролет через охраняемую зону или представляют непосредственную угрозу.
Предпочтительно, заявленное устройство взаимодействует с основной станцией, которая выполняет роль командного пункта, обеспечивающего дистанционное управление и контроль за работой БПЛА-перехватчиком, мониторинг воздушного пространства и оборудована системами обнаружения и идентификации малоразмерных воздушных целей.
В качестве полезной нагрузки на внешней стороне корпуса или в его отсеке установлен по меньшей мере, один таран с ударной частью, таран подвижно соединен с корпусом посредством устройства поглощения энергии удара. Для усиления воздействия на цель таран может быть дополнительно снабжен противовесами, утяжелителями и другими известными элементами. Таран может быть представлен в виде замкнутой рамки внутри которой установлена сетка, может выполнять еще и функцию посадочного шасси, может иметь дополнительные разъемные или подвижные соединения с корпусом, На таране дополнительно могут быть установлены электронные устройства разного типа: датчики, элементы системы наведения на цель, системы подавления электронных устройств цели (радиочастотные, ультразвуковые, электромагнитные и другие), сервоприводы позволяющие поворачивать таран вокруг своей оси или менять положение относительно корпуса или раскрывать телескопический таран, устройства натяжения сетки и другие известные элементы и их комбинации. В других вариантах может быть установлен балансир - груз служащий для уравновешивания сил инерции, соединённый с подвижным тараном. Предпочтительно, форма выполнения тарана должна обеспечивать стабильность его положения относительно корпуса БПЛА без необратимых деформации при динамических нагрузках, возникающих в полете и при перехвате цели, таран может быть составным из разных элементов, в виде самостоятельной детали либо в виде многодетальной конструкции, быть полым, или иметь отсек для сетки. Материал из которого выполнен таран может быть представлен металлом, пластиком, резиной или другим известным материалом.
Ударная часть тарана непосредственно служит для контактного воздействия на цель и может быть представлена в виде штанги с острой концевой частью, стойки, телескопической трубки, клинком с острой кромкой, стержнем с выступающими в стороны поражающими элементами, утяжелителя, в некоторых вариантах выполнения ударная часть тарана может быть в виде сменного модуля, может быть полностью или частично выполнен из хрупкого материала, который при перехвате поглощает большую часть энергии удара и при этом разрушается или быть другим известным устройством.
Устройство поглощения энергии удара предназначено для демпфирования (рассеивания) основной части энергии столкновения тарана с целью. Состоит по меньшей мере, из демпферного устройства и подвижного соединения выполненного между ударной частью тарана и корпусом БПЛА. Подвижное соединение может быть представлено шарнирным соединением (цилиндрический, шаровой, карданный), упругим элементом (пружина, эластичная муфта, упругая пластина), гибким элементом (ремень, трос), комбинированным (двумя или более из указанных выше устройств) или другим известным устройством, которое обеспечит заданное смещение тарана относительно корпуса при столкновении ударной части тарана с целью. После столкновения с целью энергия удара частично затрачивается на смещение тарана относительно корпуса, а демпфер окончательно поглощает и рассеивает энергию удара. По способу поглощения энергии удара устройство может относится к следующим группам: фрикционные, гидравлические, эластомерные, из упругих элементов, магнитные, комбинированные (поглощение энергии происходит двумя или более из указанных выше способов) или другие известные устройства.
В других вариантах выполнения устройство поглощения энергии удара может быть представлено системой сбалансированной автоматики, реализующей принцип компенсации импульса отката подвижного после удара тарана при помощи противомассы. Сбалансированная автоматика может быть в виде рычагов, шестеренок, зубчатых реек или другой известной конструкции, противомасса может быть представлена утяжелителем или элементом оборудования (например, аккумулятором).
Предпочтительно, таран может менять свое положение относительно корпуса посредством электромеханического привода, шагового двигателя, сервопривода или другого известного устройства. Сервопривод может состоять из электромотора с редуктором, датчика угла поворота выходного вала редуктора, блока питания и посредством передающих механизмов (ременные, цепные, зубчатые и др.) передает движение на ведомый элемент - таран. Предпочтительно сервопривод взаимодействует с подвижным соединением устройства поглощения энергии удара например, с шарниром выполненным между ударной частью тарана и корпусом БПЛА, в некоторых вариантах сервопривод может быть элементом такого соединения, в других вариантах сервопривод может быть установлен на корпусе БПЛА. Сервопривод по команде может установить таран в разных положениях, например, в режиме «полет» таран размещен вдоль корпуса или в отсеке корпуса, в режиме «перехват» таран выдвигается максимально далеко от корпуса на позицию для удара, в режиме «гарпун» таран направляется своей острой частью на цель для ее захвата, в режиме «сеть» на таране разворачивается сетка (если она предварительно не установлена) и при необходимости происходит разворот тарана или БПЛА плоскостью растянутой сетки по направлению к цели. Так же сервопривод может обеспечить изменение силы удара при столкновения тарана с целью, например за счет быстрого перехода из режима «полет» в режим «перехват» непосредственно перед контактом с целью. Блок управления положением тарана представляет собой вариант контроллера, получающего данные от систем БПЛА, подключается к системе управления полетом и активно с ней взаимодействует. На их основе передаются команды на двигатели сервопривода, указывая им, когда и с какой скоростью нужно двигаться. Таран может убираться в отсек в фюзеляже или на крыле, после отсек может закрываться створками, что улучшает обтекаемость.
Таран может применятся как ударное оружие для механического разрушения цели. Для этого он устанавливается стационарно на корпусе или выполнен с возможностью автоматического выдвижения. Предпочтительно, таран выдвинут максимально от корпуса на условное расстояние F. В таком положении ударная часть тарана обладает большей площадью фронтальной проекции по сравнению с площадью фронтальной проекции корпуса, что увеличит шансы гарантированного поражения цели, а так же уменьшается вероятность столкновения корпуса БПЛА-перехватчика с целью.
Таран может применятся для нанесения точечного поражения в виде колющего удара по типу «гарпун». Предпочтительно такой удар наносится концевым элементом ударной части тарана, установленного за габариты корпуса. Такое воздействие позволит обездвижить дрон-нарушитель, но при этом удержать его в воздухе, что бы исключить падения цели например, в местах скопления людей.
Таран может взаимодействовать с гибкой сеткой для ловли дронов-нарушителей. Сетка может быть изначально установлена на таране, выполненном в виде рамки, быть прикрепленной к тарану одной из своих сторон или быть скрученной в плотный рулон на стержне, который установлен жестко или подвижно на таране или корпусе и под воздействием пружины или сервопривода сетка раскрывается, сетка может быть установлена в отсеке выполненном в таране или корпусе, сетка может разворачивать за счет перемещения по направляющим выполненным на таране, за счет раздвижения в стороны подвижных элементов формирующих тело тарана, за счет изменения положения элементов посадочного шасси выполняющего и роль тарана или взаимодействует с тараном другим известным способом. Дополнительно для автоматизации разворачивания сетки может быть установлен сервопривод. Совместно с перехватом сеткой могут быть применены устройства подавления электроники цели (за счет акустического воздействия, внесение помех в управление, подмены сигналов и т.п.). Таран за счет своей жесткой структуры взаимодействует с сеткой для ловли дронов-нарушителей, что обеспечит в полете четкое позиционирование сетки относительно корпуса и минимизирует раскачивание сетки на больших скоростях. Это решение превосходит известные беспилотники-перехватчики со свободно подвешенной сетью.
Управление полетом и наведение на цель осуществляется с участием или без участия человека в контуре управления (в автономном или дистанционно-управляемом режиме), с использованием машинного зрения, с применением искусственного интеллекта или другим известным способом. Задача наведения заключается в сближении тарана с целью, в совмещении их координат и решается с помощью различных методов наведения на цель с использованием комплекса взаимосвязанных устройств. В него входит корпус БПЛА с его динамическими характеристиками, таран с системой управления его положением относительно корпуса (в варианте автоматического выдвижения тарана), устройства, которые определяют положение цели в пространстве, системы передачи информации и другие. На БПЛА-перехватчике может быть установлена головка самонаведения (ГСН) которая принимает собственные излучения цели в виде радио, радиолокационных, тепловых (ИК) излучений, реагирует на шум винтов или другой фон. Обрабатывая принятые излучения, ГСН выдает в автопилот сигналы. Система наведения выполнена с возможностью обеспечить перехват цели за счет контактного пересечения траектории движения ударной части тарана с траекторией движения дрона-нарушителя, при этом система наведения в момент перехвата обеспечивает бесконтактный пролет самого корпуса БПЛА рядом с дроном-нарушителем. Это достигается за счет корректировок управления полетом или изначально задано специальными алгоритмами в программе наведения на цель или другим способом. В программу системы управления полетом могут быть введены дополнительные алгоритмы управления, стабилизирующие положение корпуса БПЛА при ударных нагрузках после перехвата цели.
Заявляемый многоцелевой БПЛА-перехватчик работает следующим образом: при подачи команды оператора с основной станции БПЛА-перехватчик активируется и выдвигается на участок где был замечен дрон-нарушитель. В режиме «полет» таран размешен в отсеке корпуса или вдоль корпуса для уменьшения аэродинамического сопротивления. При решение атаковать цель сервопривод переводит таран в режим «перехват»: таран на шарнирном соединении поворачивается, и его ударная часть выдвигается за габариты корпуса на расстояние F. В таком положении таран обладает большей площадью фронтальной проекции, что увеличивает шансы гарантированного поражения цели. Система наведения рассчитывает траекторию движения так, что бы ударная часть тарана столкнулся с целью, но при этом корпус должен неконтактно пролететь рядом с целью на расстоянии R. При необходимости сервопривод может обеспечить изменение силы удара при столкновения тарана с целью за счет быстрого перехода из режима «полет» в режим «перехват» непосредственно перед контактом с целью, то есть в этот момент ударная часть тарана движется к цели быстрее чем движется сам корпус БПЛА. Столкновение с целью воспринимается ударной частью тарана, в месте подвижного соединения происходит смещение тарана относительно корпуса посредством устройства поглощения энергии удара (поворот на шарнире, или за счет изгиба гибкого элемента, или за счет деформации упругого элемента, или за счет комбинации таких устройств) и при этом демпфер рассеивает энергию удара от столкновения тарана с целью, что ведет к снижению нагрузок, передающихся на корпус перехватчика. БПЛА-перехватчик не теряет возможности выполнения полетной программы, может зафиксировать результат перехвата, при необходимости атаковать другие цели и самостоятельно возвратиться на базу. При необходимости вывести цель из строя, но не дать ей упасть на землю БПЛА-перехватчик в режиме «гарпун» выдвигается за габариты корпуса и направляет острый элемент ударной части тарана на цель, пробивает конструкцию дрона-нарушителя и захватывает его. В режиме «сеть» на таране развертывается сетка (например, за счет выдвижения рычага на таране к которому прикреплена часть сетки), таран выдвигается за габариты корпуса и при необходимости происходит разворот тарана плоскостью растянутой сетки по направлению к цели. При этом нейтрализуется дрон-нарушитель, но не разрушается.
Таким образом, заявляемая конструкция обеспечивает расширение арсенала и функциональных возможностей беспилотников-перехватчиков.
Сопоставительный анализ заявляемого устройства с прототипом позволяет сделать вывод о том, что заявляемый многоцелевой БПЛА-перехватчик отличается от известного:
- установкой на корпусе в качестве полезной нагрузки по меньшей мере, одного тарана с ударной частью;
- выполнением тарана в виде отдельного конструктивного элемента;
- выполнением подвижного соединения тарана с корпусом посредством устройства поглощения энергии удара;
- выполнением устройства поглощения энергии удара в виде шарнира с демпфирующим устройством;
- установкой перед столкновением с целью ударной части тарана, выступающей за габариты корпуса на расстояние F;
- выполнением системы наведения с возможностью обеспечить перехват цели за счет контактного пересечения траектории движения цели с траекторией движения ударной части тарана, выступающей за габариты корпуса;
- выполнением системы наведения дополнительно обеспечивающей бесконтактный пролет корпуса БПЛА-перехватчика рядом с целью на расстоянии R, меньшем чем расстояние F.
Заявляемая конструкция обеспечивает:
- разработку БПЛА-перехватчика многоразового использования, эффективно поражающего посредством кинетического удара по воздушной малоразмерной цели, при этом БПЛА-перехватчик не теряет возможности выполнения полетной программы и самостоятельно возвращается на базу;
- разработку новой конструкции ударной части, позволяющей корпусу БПЛА в момент перехвата находиться вне зоны контактного столкновения с целью.
- повышение шансов гарантированного поражения цели за счет возможности выполнения ударной части с площадью фронтальной проекции значительно превышающей площадь фронтальной проекции корпуса БПЛА;
- разработку новой конструкции ударной части обеспечивающей установку сетки для ловли дрона-нарушителя и при этом сетка четко позиционирована в полете относительно корпуса за счет того, что сетка удерживается на ударной части;
- сведение к минимуму критических перегрузок передающихся на корпус БПЛА-перехватчика через ударную часть при столкновении с дроном-нарушителем;
- возможность применить сбалансированную автоматику для компенсации импульса отката подвижных после удара частей при помощи противомассы;
- возможность независимо от скорости сближения корпуса БПЛА-перехватчика и дрона-нарушителя выборочно изменять скорость столкновения ударной части с дроном-нарушителем, тем самым задавать уровень последующих повреждений цели;
- многоцелевое назначение БПЛА-перехватчика благодаря разным режимам выборочного воздействия на цель: от полного разрушение дрона-нарушителя за счет ударного эффекта при перехвате на большой скорости, выведение из строя и удержание в воздухе колющим ударом по типу «гарпун», захват в воздухе без повреждения цели за счет удерживающей сетки.
Вышеизложенное позволяет сделать вывод о том, что заявленная совокупность признаков характеризует новое конструктивное решение, ранее не известное из уровня техники, а следовательно заявленное изобретение соответствует критерию «новизна».
Поскольку предлагаемая конструкция многоцелевого БПЛА-перехватчика и достигаемый технический результат явным образом не следуют из уровня техники, можно сделать вывод о соответствии заявляемого решения критерию «изобретательский уровень».
Предлагаемая конструкция многоцелевого БПЛА-перехватчика может быть изготовлена с использованием известных в технике конструктивных деталей и известных технологий. Возможность промышленного использования заявляемого многоцелевого БПЛА-перехватчика позволяет сделать вывод о его соответствии критерию «промышленная применимость».
Примеры конкретного выполнения многоцелевого БПЛА-перехватчика описываются ниже со ссылками на прилагаемые чертежи.
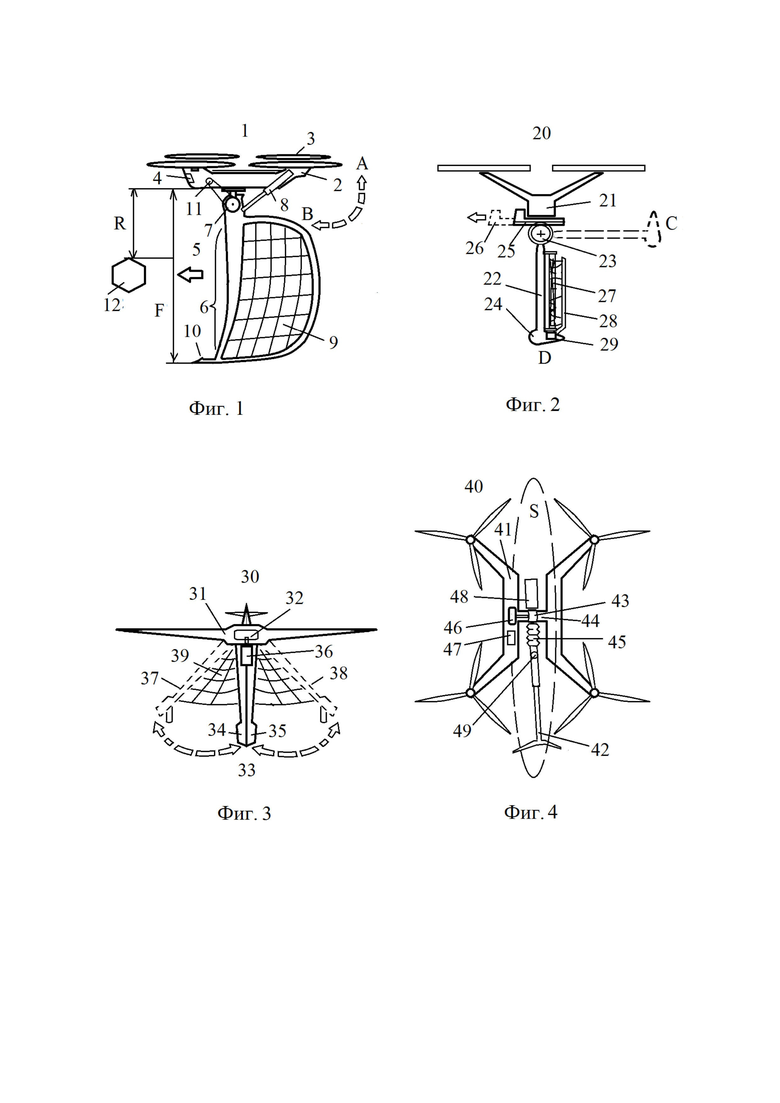
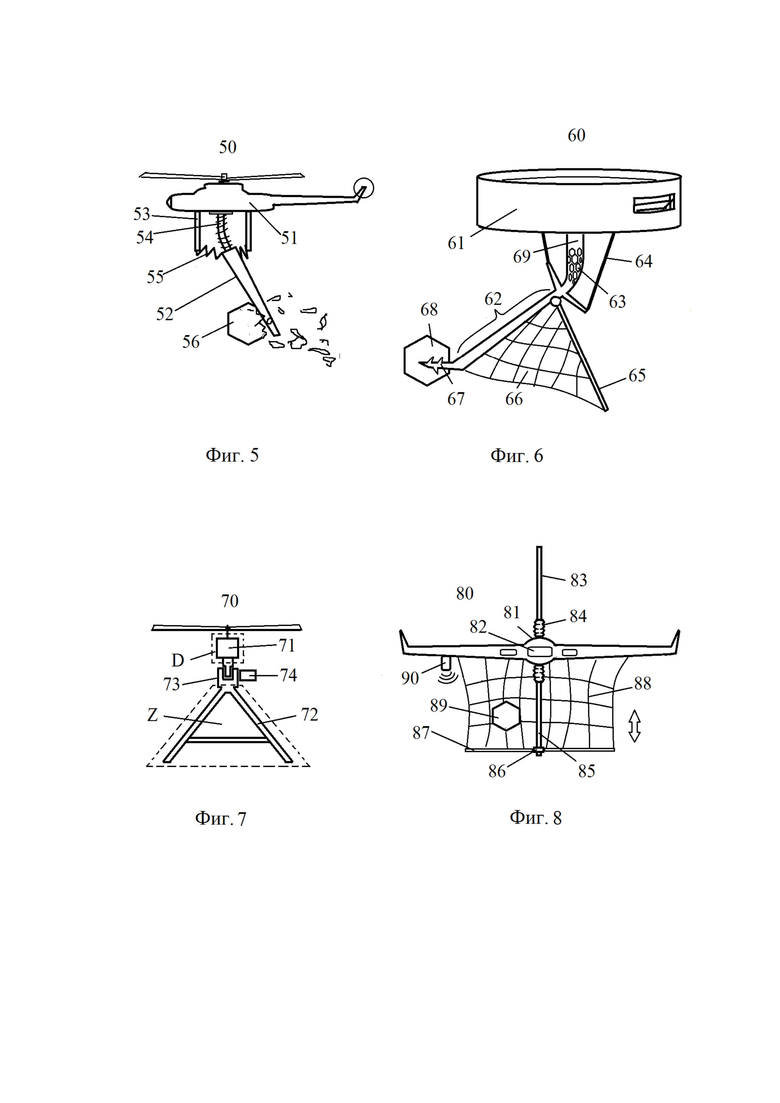
Фиг.1 БПЛА-перехватчик в виде мультикоптера, устройство поглощения энергии удара представлено шарниром и демпфером, в корпусе выполнен сервопривод изменения положения тарана, на таране выполнены рамка с растянутой сеткой, условная схема наведения ударной части тарана на цель и схема пролета корпуса при перехвате. Фиг.2 Устройство поглощения энергии удара представлено сбалансированной автоматикой, реализующей принцип компенсации импульса отката подвижного тарана после удара при помощи противомассы. Фиг.3 Схема работы тарана, выполненного из нескольких раздвижных элементов, таран в виде посадочного шасси. Фиг.4 Корпус представлен Н-образной рамой, таран в виде телескопического элемента, сервопривод и контроллер управляют вращением тарана. Фиг.5 Схема перехвата цели, устройство поглощения энергии удара представлено гибким элементом с демпфирующим устройством. Фиг.6 Перехват цели по схеме «гарпун» таран снабжен острой частью с удерживающими зацепами, устройство поглощения энергии удара представлено в виде упругого сотового элемента, сетка раскрыта на таране. Фиг.7 Таран в виде посадочного шасси, сервопривод изменения положения тарана относительно корпуса установлен непосредственно на устройстве поглощения энергии удара, схема сравнения площади фронтальной проекции ударной части и площади фронтальной проекции корпуса БПЛА. Фиг.8 Вариант выполнения стационарного двойного тарана в виде штанг, сетка выполнена с возможностью перемещения по тарану посредством сервопривода, система наведения на цель в виде головки самонаведения, установлена система радиоэлектронного подавления.
Фиг.1 Многоцелевой БПЛА-перехватчик 1, имеет корпус 2, движитель 3, систему наведения на цель 4, в качестве полезной нагрузки установлен таран 5 с ударной частью 6, устройство поглощения энергии удара представлено шарниром 7 и демпфером в виде амортизатора 8, на таране выполнены рамка с растянутой сеткой 9 и гарпун 10, в корпусе 2 установлен сервопривод 11 изменения положения тарана 5, ударная часть 6 тарана выступает от корпуса на расстояние F, система наведения выполнена с возможностью обеспечить перехват цели 12, при этом система наведения обеспечивает бесконтактный пролет корпуса 2 рядом с целью 12 на расстоянии R , меньшем чем расстояние F.
Устройство 1 работает следующим образом: при подачи команды БПЛА-перехватчик выдвигается к цели 12. В режиме «полет» таран 5 размешен вдоль корпуса 2 (положение «А» на рис. не показано). Перед атакой цели 12 сервопривод 11 переводит таран 5 в режим «перехват»: таран на шарнирной опоре 7 поворачивается и его ударная часть 6 устанавливается максимально далеко от корпуса (расстояние F) на позицию для удара (положение «В»). В положении «В» таран обладает большей площадью фронтальной проекции, что увеличивает шансы гарантированного поражения цели. Система наведения 4 рассчитывает траекторию движения так, что бы ударная часть 6 столкнулся с целью 12, но при этом корпус 2 должен неконтактно пролететь рядом с целью 12 на расстоянии R. Столкновение воспринимается ударной частью 6, и от удара таран начинает смещаться относительно корпуса 2, посредством устройства поглощения энергии удара происходит поворот тарана на шарнире 7 и при этом демпфер амортизатор 8 рассеивает энергию удара. При необходимости БПЛА-перехватчик 1 в режиме «гарпун» атакует цель острым элементом 10 и захватывает его (не показано). В режиме «сеть» происходит разворот тарана или БПЛА плоскостью растянутой сетки 9 по направлению к цели 12 и захватывает ее (не показано).
Фиг.2 БПЛА-перехватчик 20 с корпусом 21, таран 22 с ударной частью в виде утяжелителя 24, устройство поглощения энергии удара представлено системой сбалансированной автоматики в виде шестеренки 23 установленной на таране 22 и зубчатой рейки с противомассой 25, сетка свернута в рулон 27 и установлена на таране, подвижная штанга 28 соединена с сеткой, сервопривод 29 управляет поворотом штанги 28. Таран в режиме «полет» находится в положении «C», таран в режиме «перехват» находится в положение «D». При столкновении с целью утяжелитель 24 замедляет скорость смещения назад тарана 22, шестеренка 23 поворачивается и начинает линейно смещать зубчатую рейку с противомассой 25 на позицию 26 - тем самым реализуется принцип компенсации импульса отката тарана при помощи противомассы и минимизируются ударные нагрузки на корпус 21.
Фиг.3 БПЛА-перехватчик самолетного типа 30 с корпусом 31, с системой управления 32, таран 33 представлен раздвижными элементами 34,35, установлен сервопривод 36 для управления элементами 34,35, по команде на сервопривод 36, элементы 34,35 раскрываются в стороны и устанавливаются на позициях 37 и 38 в виде посадочного шасси, одновременно растягивается сетка 39.
Фиг.4 БПЛА-перехватчик 40, корпус 41 представлен Н-образной рамой, телескопический таран 42 с механизмом его раскрытия 49, устройство поглощения энергии удара представлено в виде кольца 43 вокруг перемычки 44 (Н-образной рамы), демпфер 45, сервопривод 46 и контроллер 47 управляют вращением тарана 42, для уравновешивания сил инерции на таране установлен балансир 48. Такая конструкция корпуса 41 позволит выборочно устанавливать таран 42 по всей плоскости вращения S для выполнения разных задач, механизмом раскрытия 49 может изменять габариты тарана 42, сервопривод 46 может тормозить откат тарана 42 и тем самым дополнительно рассеивать импульс удара как демпфер.
Фиг.5 БПЛА-перехватчик представлен вертолетом 50 с корпусом 51, ударная часть тарана в виде лезвия 52, устройство поглощения энергии удара представлено гибким элементом 54 с демпфирующим устройством 55, соединенным с опорными элементами 53 корпуса 51. При перехвате цели 56, от удара происходит изгиб элемента 54, а демпфер 55 рассеивает импульс удара.
Фиг.6 БПЛА-перехватчик 60 представлен с корпусом в виде кольца 61, которое «охватывает» летательный аппарат по кругу, ударная часть 62 на которой выполнен «гарпун» 67 в виде острой части с удерживающими зацепами, на опоре 69 установлено устройство поглощения энергии удара представленное в виде упругого сотового элемента 63, сервопривод (не показан) посредством гибкой тяги 64 изменяет положение гарпуна 67, сетка 66 раскрыта посредством штанги 65. При задачи захватить и удержать в воздухе цель 68 поступает команда «гарпун» и гибкая тяга 64 направляет гарпун 67 для перехвата цели 68.
Фиг.7 БПЛА-перехватчик 70, таран в виде посадочного шасси 72 установленного на корпусе 71, устройство поглощения энергии удара 73 в виде шарнира на котором установлен сервопривод 74 управления положением тарана 72, площадь фронтальной проекции ударной части тарана Z и площадь фронтальной проекции корпуса D. Сравнительная схема показывает, что площадь Z может в несколько раз превышать площадь D и как следствие - значительно увеличиваются шансы гарантированного поражения цели.
Фиг.8 БПЛА-перехватчик представлен «летающим крылом» 80 с корпусом 81, головкой самонаведения 82, первый стационарный таран 83 и устройство поглощения энергии удара 84, второй стационарный таран 85, сетка 88 закреплена на штанге 87, штанга 87 выполнена с возможностью перемещения по тарану 85 посредством сервопривода 86, что позволяет перехватывать цель 89 без ее разрушения, система радиоэлектронного подавления 90 нейтрализует электронику цели 89.
Использование предлагаемого устройства позволит расширить ассортимент и повысить эффективность беспилотных летательных аппаратов, применяемых для перехвата малоразмерных воздушных целей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Роботизированный боевой комплекс | 2023 |
|
RU2819942C1 |
| БПЛА-перехватчик (варианты) | 2024 |
|
RU2825677C1 |
| Беспилотный летательный аппарат-перехватчик | 2024 |
|
RU2825353C1 |
| Устройство перехвата беспилотных летательных аппаратов | 2020 |
|
RU2738383C2 |
| Робототехнический комплекс и способ его эксплуатации на высотных объектах, относящихся к электроэнергетике и радиосвязи | 2019 |
|
RU2715682C1 |
| Зенитная управляемая ракета | 2024 |
|
RU2837930C1 |
| Зенитная управляемая ракета | 2024 |
|
RU2837439C1 |
| СИСТЕМА ЗАЩИТЫ ОБЪЕКТА ОТ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2023 |
|
RU2823195C1 |
| Малый беспилотный летательный аппарат (варианты) | 2023 |
|
RU2824014C1 |
| Беспилотный летательный аппарат-перехватчик | 2020 |
|
RU2741142C2 |
Изобретение относится к области авиации, в частности к конструкциям беспилотных перехватчиков. Многоцелевой БПЛА-перехватчик содержит в качестве полезной нагрузки таран с ударной частью, устройство поглощения энергии удара, имеющее шарнир и демпфер в виде амортизатора. На таране установлены рамка с растянутой сеткой и гарпун. В корпусе установлен сервопривод изменения положения тарана. Ударная часть тарана выступает от корпуса на расстояние F. Система наведения выполнена с возможностью обеспечить тарану контактный перехват цели, при этом система наведения обеспечивает бесконтактный пролет корпуса рядом с целью на расстоянии R, меньшем чем расстояние F. Обеспечивается расширение функциональных возможностей беспилотных летательных аппаратов для перехвата малоразмерных воздушных целей. 9 з.п. ф-лы, 8 ил.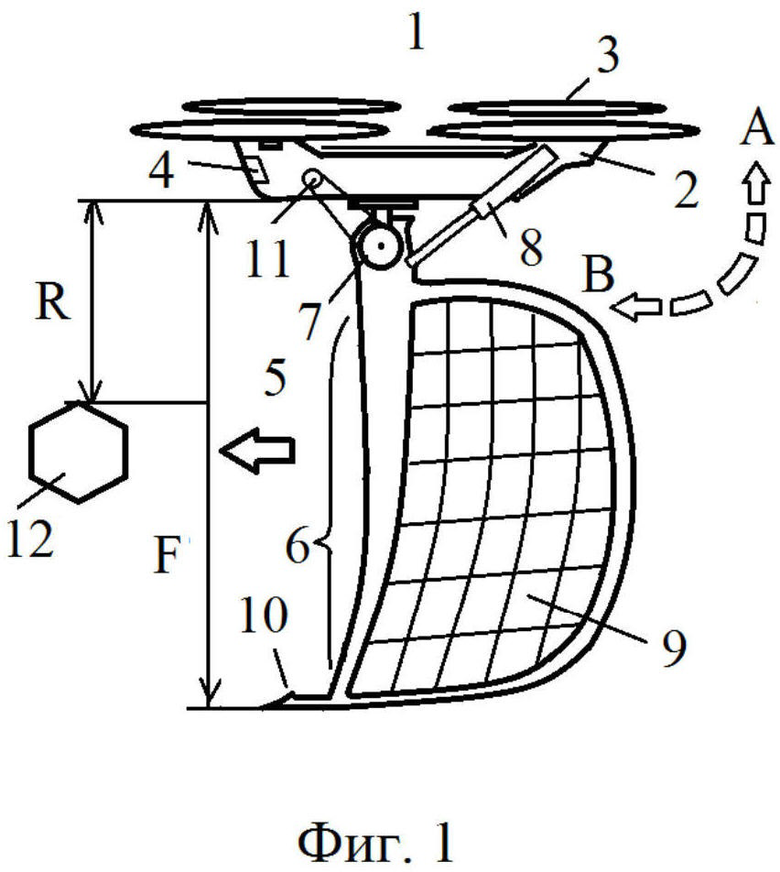
1. Многоцелевой БПЛА-перехватчик для кинетического воздействия посредством столкновения с малоразмерной воздушной целью, состоящий из корпуса для размещения оборудования и полезной нагрузки, движителя, посадочного шасси, системы управления и навигации, системы наведения на цель, отличающийся тем, что на корпусе в качестве полезной нагрузки установлен по меньшей мере, один таран с ударной частью, таран представлен в виде отдельного конструктивного элемента и подвижно соединен с корпусом посредством устройства поглощения энергии удара, устройство поглощения энергии удара представлено шарниром с демпфирующим устройством, ударная часть тарана перед столкновением с целью выступает за габариты корпуса на расстояние F, система наведения выполнена с возможностью обеспечить перехват цели за счет контактного пересечения траектории движения цели с траекторией движения ударной части тарана, выступающей за габариты корпуса, при этом система наведения дополнительно в момент перехвата обеспечивает бесконтактный пролет корпуса БПЛА-перехватчика рядом с целью на расстоянии R, меньшем чем расстояние F.
2. Многоцелевой БПЛА-перехватчик по п. 1, отличающийся тем, что дополнительно установлен сервопривод управляющий изменением положения тарана относительно корпуса.
3. Многоцелевой БПЛА-перехватчик по п. 1, отличающийся тем, что корпус представлен Н-образной рамой, в центре рамы установлено устройство поглощения энергии удара, плоскость вращения тарана проходит через центр Н-образной рамы по направлению движения БПЛА.
4. Многоцелевой БПЛА-перехватчик по п. 1, отличающийся тем, что дополнительно выполнена гибкая сетка, при этом края сетки установлены на таране.
5. Многоцелевой БПЛА-перехватчик по п. 4, отличающийся тем, что дополнительно установлен сервопривод, управляющий раскрытием сетки, установленной на таране.
6. Многоцелевой БПЛА-перехватчик по п. 1, отличающийся тем, что таран представлен в виде посадочного шасси.
7. Многоцелевой БПЛА-перехватчик по п. 1, отличающийся тем, что устройство поглощения энергии удара представлено сбалансированной автоматикой, реализующей принцип компенсации импульса отката тарана подвижного после удара при помощи противомассы.
8. Многоцелевой БПЛА-перехватчик по п. 1, отличающийся тем, что устройство поглощения энергии удара представлено гибким элементом с демпфирующим устройством.
9. Многоцелевой БПЛА-перехватчик по п. 1, отличающийся тем, что устройство поглощения энергии удара представлено упругим элементом с демпфирующим устройством.
10. Многоцелевой БПЛА-перехватчик по п. 1, отличающийся тем, что таран снабжен устройством типа «гарпун» в виде острой частью с удерживающими зацепами.
| RU 2016132752 A, 13.02.2018 | |||
| Прессформа для изготовления резиновых образцов | 1952 |
|
SU94690A1 |
| Устройство для контроля сопротивления изоляции | 1961 |
|
SU145279A1 |
| US 20190285388 A1, 19.09.2019 | |||
| KR 101806305 B1, 07.12.2017. | |||

