Изобретение относится к мультиагентной робототехнике и предназначено для замещения личного состава поисково-спасательных и санитарных подразделений при проведении поиска и эвакуации раненых/пострадавших из опасных районов.
Известны планировавшиеся разработки и проекты создания многофункциональных робототехнических поисково-эвакуационных комплексов с автономными мобильными модулями, оснащёнными системами навигации, ориентации и позиционирования, устройствами для погрузки раненых/пострадавших в транспортный отсек модуля-эвакуатора и предназначенных для поиска и эвакуации раненых/пострадавших из опасных зон и транспортировки к месту оказания квалифицированной помощи.
Также известно, что конструктивно ни один из известных проектов не был доведен до пригодности к испытаниям даже в условиях имитации приближенности к реальным условиям применения.
На концептуальном уровне ни в одной из известных разработок не было обеспечено выполнение требуемого от автономного спасательно-эвакуационного комплекса функционала. Прежде всего, не было предусмотрено безлюдное безопасное отделение тела раненого/пострадавшего от подложки и погрузка его в транспортный средство.
Также, ни в одном известном проекте робототехнической поисково-эвакуационной системы не предусмотрен подъём тела раненого/пострадавшего и погрузка в транспортное средство без изменения позы раненого/пострадавшего, и автоматическое фиксирование шейно-плечевого отдела раненого/пострадавшего.
Наиболее близким изобретению по назначению аналогом является проект медицинской службы (РТК-МС) для розыска, выноса раненых с поля боя и оказания им элементов первой помощи. Проект направлен на сокращение периода времени от момента обнаружения раненого/пострадавшего до момента оказания ему медицинской помощи посредством применения комплекса РТК-МС в полевых условиях. Для этого в состав комплекса включают «транспортно-управляющую машину» ТУМ и «дистанционно-управляемую эвакуационную» машину. Для воздействия на внешние объекты, ограничивающие подвижность раненого/пострадавшего, предполагалось использовать пневматический домкрат. Для извлечения раненых/пострадавших из завалов планировалось оснастить «дистанционно-управляемую эвакуационную» машину специально созданной «рукой-манипулятором». Для обеспечения защиты раненого/пострадавшего от дополнительного поражения огневым воздействием противника во время транспортировки предполагалось применение специального «бронированного контейнера-ложемента». Для поддержания жизнеспособности раненого/пострадавшего предлагалось оснастить бронированный контейнер системами жизнеобеспечения [Шелепов, А. М., Жидик, В. В., Черный, А. Ж. Перспективные технологии лечебно-эвакуационного обеспечения в условиях современных военных конфликтов // Военно-медицинский журнал. 2007. № 2. С. 13-15.].
Указанный проект не был реализован вследствие недостаточной проработанности концепции проекта и вследствие отсутствия выполнимых инженерно-технических решений по его реализации. Прежде всего, не решены ключевые кинематические и алгоритмические задачи по безлюдному отделению тела раненого/пострадавшего от подложки. Не решена задача обеспечения безопасного подъёма тела раненого/пострадавшего. Не решена задача обеспечения неизменности позы раненого/пострадавшего до момента доставки его к месту оказания квалифицированной помощи. Без решения этих комплексных кинематических и алгоритмических задач создать применимую эффективную робототехническую систему для эвакуации раненых/пострадавших из опасной зоны невозможно. Также, следует отметить, что два основных компонента комплекса - «транспортно-управляющая машина» ТУМ и «дистанционно-управляемая эвакуационная» машина не автономны и требуют использования обученного специальным навыкам дистанционного управления персонала.
Особо следует отметить отсутствие решения безопасной погрузки раненого/пострадавшего в бронированный контейнер-ложемент с встроенными в него системами жизнеобеспечения. Ещё одним недостатком проекта является низкая эффективность применения, обусловленная тем, что в одном унитарном агрегате совмещены задачи розыска, выноса раненых с поля боя и оказания им элементов первой помощи. Для выполнения этих задач нужны мобильные автономные агрегаты с различными массогабаритами, различной подвижностью, различными скоростными и динамическими характеристиками и различным оборудованием. Вследствие этого, унитарный агрегат будет малоэффективным при выполнении любой из предписанных ему задач.
Задачей изобретения является создание робототехнического комплекса для автономного осуществления операций безлюдного поиска раненых/пострадавших в опасной зоне, доставки к месту расположения раненого/пострадавшего подъёмно-погрузочного оборудования, осуществления безопасного для раненого/пострадавшего отделения его тела от подложки, безопасного подъёма и погрузки в транспортно-медицинскую капсулу с обеспечением прикрытия от поражения огневым воздействием противника при проведении спасательно-эвакуационных работ в районе боевых действий, и транспортировки раненого/пострадавшего к месту оказания квалифицированной помощи.
Задача изобретения решается тем, что поисково-эвакуационный спасательный комплекс для осуществления безлюдного поиска и эвакуации раненых/пострадавших из опасных зон выполняют мультиагентным со стационарными модулями и автономными мобильными модулями, выполняющими согласованные действия по поэтапному выполнению миссии-предназначения комплекса.
Стационарные модули робототехнического комплекса представляют собой полуавтономные роботизированные модули-агрегаты для перезарядки и замены аккумуляторных батарей и пополнения боекомплекта вооружения на мобильных автономных поисково-разведывательных модулях комплекса, замены картриджей и заправки расходных материалов на мобильных модулях-эвакуаторах комплекса и выгрузки транспортно-медицинских капсул с ранеными/пострадавшими из модулей-эвакуаторов. Конструкции и технико-эксплуатационные характеристики стационарных модулей могут быть выполнены любыми известными способами из любых традиционных для промышленного изготовления электромеханических агрегатов материалов.
Отдельные агрегаты и устройства стационарных модулей, предназначенные для зарядки аккумуляторных батарей, устройства для их автоматической замены на мобильных модулях, устройства для замены картриджей различного вида в модулях-эвакуаторах, устройства для заправки на модулях-эвакуаторах ёмкостей с расходными материалами и/или замены самих ёмкостей на свежезаправленные могут также быть изготовлены из известных материалов по известным образцам изделий аналогичного назначения.
Мобильные модули комплекса представлены двумя видами автономных робототехнических систем. Один вид составляют мультиагентные подразделения воздушных и наземных оснащённых навигационной, позиционирующей и сенсорной системами с компьютерным зрением автономных воздушных и наземных вспомогательных модулей для разведки местности и поиска раненых/пострадавших. Также, в перечень выполняемых ими действий могут входить поиск и нейтрализация источников огневого воздействия на модули комплекса, прикрытие модулей-эвакуаторов от огневого поражения блокированием директрис возможного огневого воздействия и оказание содействия при освобождении раненых/пострадавших от ограничивающих подвижность объектов. Для этого данный вид автономных мобильных модулей оснащают дополнительно лазерными и/или инфракрасными и/или акустическими системами обнаружения источников возможного огневого воздействия на модули комплекса и вооружением безоткатного действия и/или малокалиберными планирующими управляемыми/самонаводящимися бомбами и ракетами. Наземные модули могут оснащать дополнительно обычным огнестрельным вооружением. Также, наземные модули могут оснащать манипулятором для силового воздействия на ограничивающие подвижность раненого/пострадавшего объекты, и/или для оказания согласованных динамических воздействий на внешние объекты при расчистке препятствий на пути к раненому/пострадавшему.
Известен патент РФ на изобретения №2090429 «Двухколейный двухколёсный велосипед с плавающей кабиной», где обеспечивается подавление маятникового раскачивания кабины, обеспечение удобной посадки и выхода из кабины и сохранение управляемости при всех режимах движения, для этого в конструкции, содержащий два несущих колеса-движителя и подвешенную между ними кабину, рама кабины выполнена отдельной от несущей рамы, на которой закреплены колеса-движители и эллиптические направляющие балки, на которые кабина опирается несущими и направляющими роликами, а бортовые цепные передачи, соединяющие мускульный привод и ведомые звездочки колес-движителей, обегают паразитные звездочки на концах направляющих балок.
Известен патент РФ на изобретения № 2102272 «Одноосный вездеход» одноосный вездеход с компенсированием реактивного момента на кабине содержит ведущий мост с колесами - движителями и несущее основание с кабиной с обитаемым и моторным отсеками. Основание опирается своими продольными несущими балками на опорные и направляющие ролики на концах балки моста, обитаемый отсек с органами управления установлен на несущих балках впереди колес-движителей, а моторный отсек с двигателем, трансмиссией и отдельным приводом к балке моста подвешен к несущим балкам позади колес-движителей так, что центр тяжести кабины располагается ниже оси колес-движителей, привод на балку моста смещает по опорным роликам основание относительно ведущего моста для создания вращательных моментов, компенсирующих реактивные моменты, отклоняющие
Известен патент РФ на изобретения № 2405122 «Робот-сапёр» состоящий из множества одноосных самоходных модулей, доставляемых на место разминирования посредством отдельного транспортного средства и осуществляющих коллективными действиями разминирование отдельных боеприпасов или минных полей. Одноосные самоходные модули выполнены автономными с возможностью обмена информацией между ними и составляющими мультиагентную систему, которые снабжены навигационными системами с устройствами ориентации относительно реперов и/или спутниковой навигационной системой, оборудованием для дистанционного обнаружения и идентификации боеприпасов, исполнительными механизмами для их маркирования и уничтожения и нейросетевыми устройствами обработки информации и выработки команд для исполнительных механизмов в режиме коллективного управления.
Известен патент РФ на изобретения №2492620 «Сельскохозяйственный робот» содержит каретки с агрегатными отсеками, навигационным оборудованием и устройством управления роботом, а также соединяющую каретки платформу со связанными с устройством управления роботом сканерами, рабочими органами для воздействия на почву и на посадки и сбора продукции и транспортером для перемещения продукции от рабочих органов к агрегатным отсекам. Платформа выполнена сборной из унифицированных производственных и/или транспортных секций. Производственные секции снабжены рабочими органами, транспортером продукции и встроенными элементами электрической, пневматической и/или гидравлической системы робота. Рабочие органы представляют собой очувствленные посредством сенсоров положения многозвенные манипуляторы с числом степеней подвижности не меньше шести. Транспортные секции снабжены устройствами погрузки-выгрузки и обработки продукции. Удельное давление эластичных беговых частей шин колес ниже порога устойчивости посадок к вытаптыванию. Конструкции кареток модулей робота обеспечивают перемещение движителей в полном кинематическом соответствии с передвижением модулей по посадкам, что не приводит к сдвиговым деформациям почвы и образованию колеи и не сопровождается необратимым повреждением посадок и продукции.
Конструктивно воздушные и наземные поисково-разведывательные модули могут быть выполнены известными способами из традиционно используемых при создании мобильной воздушной и наземной робототехники материалов. Воздушные модули могут быть представлены мультироторными аппаратами вертикального взлёта и посадки и/или летательными аппаратами самолётного типа. Наземные мобильные поисково-разведывательные модули агрегатируют на статически остойчивых шасси любого известного вида. В том числе колёсных с количеством колёс четыре и больше, гусеничных и колёсно-гусеничных любых известных конструкций, а также двухколейных двухколёсных (далее - одноосных) шасси с динамическим управлением остойчивостью.
Важной особенностью изобретения является выполнение мультиагентными подразделениями автономных мобильных поисково-разведывательных модулей комплекса специальных алгоритмов локального взаимодействия, обеспечивающих выполнение комплексом в целом миссии предназначения комплекса. В том числе, воздушные и наземные поисково-разведывательные вспомогательные модули комплекса реализуют биоинспирированный алгоритм локального взаимодействия «Axis-algorithm» на основе модифицированного алгоритма охранно-охотничьего поведения ос. Выполнение этого алгоритма проявляется как осуществление согласованных коллективных действий подразделений воздушных и наземных модулей, направленных на обнаружение и нейтрализацию возможных источников огневого воздействия на модули комплекса, главным образом – на модули-эвакуаторы, с проявлениями элементов альтруистического поведения в виде способности блокирования собственным корпусом директрис огневого воздействия на модули-эвакуаторы. При этом воздушные поисково-вспомогательные модули используют дополнительно биоинспирированный алгоритм роевого взаимодействия в полёте «Gyrinidae-algorithm» на основе модифицированного алгоритма взаимодействия жуков из надсемейства Gyrinoidea подотряда Adephaga. Выполнение этого алгоритма управления маневрированием модулей в полёте затрудняет прицеливание из стрелкового вооружения и нацеливание и самонаведение ракет.
Для эффективного перекрытия директрис огневого воздействия наземные поисково-разведывательные модули оснащают бронёй.
Второй вид мобильных автономных модулей комплекса представляют собой наземные и воздушные модули-эвакуаторы с транспортно-медицинскими эвакуационными капсулами и подъёмно-погрузочным оборудованием.
Воздушные модули-эвакуаторы имеют вид мультироторных грузовых аппаратов вертикального взлёта и посадки, оснащённых дополнительно рычажно-шарнирными системами подвески для переноски в режиме внешней подвески транспортно-медицинских капсул с ранеными/пострадавшими и подъёмно-погрузочных агрегатов для отделения тела раненого-пострадавшего от подложки и погрузки в транспортно-медицинскую капсулу. Конструкция и технико-эксплуатационные характеристики воздушных модулей-эвакуаторов соответствуют конструкции и расчётным технико-эксплуатационным характеристикам известных проектируемых грузовых мультироторных аппаратов вертикального взлёта и посадки.
Наземные модули-эвакуаторы комплекса имеют вид оснащённых электронным устройством управления, навигационной и сенсорной аппаратурой агрегатированных на гусеничных псевдоодноосных шасси экипажей с кузовом для размещения раненого/пострадавшего или транспортно-медицинской капсулы для размещения раненого/пострадавшего с агрегатированной с ней системой жизнеобеспечения раненого/пострадавшего, подъёмно-погрузочным оборудованием для отделения тела раненого/пострадавшего от подложки и погрузки его в кузов экипажа, или, при наличии, в транспортно-медицинскую капсулу модуля-эвакуатора, расходными материалами и картриджами системы жизнеобеспечения.
Для обеспечения высокой проходимости, маневренности и управляемости движением наземные модули-эвакуаторы агрегатируют на гусеничном псевдоодноосном шасси. Конструкция псевдоодноосного гусеничного шасси соответствует конструкции, представленной в заявке № 2016125031 на изобретение «Мобильный робот», и его изготавливают из используемых при создании гусеничных тележек для мобильной техники лёгкого/сверхлёгкого классов материалов и узлов с учётом предполагаемых геоклиматических условий эксплуатации спасательных комплексов.
Для снижения уровня вибрационных и ударных нагрузок на раненого/пострадавшего и увеличения максимальной скорости движения модуля-эвакуатора по неровностям гусеничные тележки соединяют с несущей рамой модуля-эвакуатора посредством мягкой подвески в виде прикреплённых к несущим рамам гусеничных тележек кареток, перемещающихся по вертикальным стойкам несущей рамы модуля-эвакуатора и соединённых со стойками пружинами.
Для снижения амплитуды и величины ускорений поперечных угловых отклонений кузова каретки мягкой подвески соединяют тросом поперечной устойчивости.
Днище кузова модуля-эвакуатора с подъёмно-погрузочным устройством снабжают створками. Носовую и кормовую части кузова выполняют распахивающимися или откидывающимися. Для того, чтобы поперечная балка несущей рамы не создавал препятствий подъёму раненого-пострадавшего в кузов, балку выносят в заднюю часть конструкции модуля-эвакуатора и укрепляют на продольных балках, соединяющих её с вертикальными стойками рамы.
Подъёмно-погрузочное оборудование модулей-эвакуаторов может быть изготовлено в двух различных вариантах с принципиально различными способами осуществления операции отделения тела раненого/пострадавшего от подложки и погружения его в транспортно-медицинскую капсулу. Для отделения тела раненого/пострадавшего от подложки используется высокократная быстротвердеющая пена, нагнетаемая в зазор между телом раненого/пострадавшего и подложкой с помощью самовыворачивающихся предварительно свёрнутых внутрь себя отрезков мягких перфорированных шлангов, закреплённых на концах телескопических манипуляторов с пеноподающими трубками. Подъём раненого/пострадавшего осуществляют подъёмно-погрузочным устройством-элеватором, частью конструкции которого является пеноподающая система. Для обеспечения свободного отделения тела раненого/пострадавшего от подложки подъемно-погрузочное устройство снабжают системой подачи в пеноподающую систему специального протекторного раствора, или однокомпонентной жидкости, смачивающей поверхность подложки и одежду или поверхность тела раненого/пострадавшего и создающей на них неадгезирующее к пенообразующему составу покрытие, а также способствующее отверждению пены. Также, эта жидкость может обладать антисептическими свойствами и дезинфицировать поверхность тела раненого/пострадавшего. В состав пенообразующего материала могут входить присадки, ограничивающие срок существования пены в отверждённом состоянии. Состав протекторной жидкости и состав пенообразующего раствора выбирается из множества известных составов в соответствии с геоклиматическими условиями эксплуатации комплекса.
Агрегат для подачи вспомогательной жидкости пенообразующего состава для укомплектования оборудования модуля-эвакуатора выбирается из множества известных агрегатов в соответствии с требуемой производительностью по запланированному режиму и условиями эксплуатации комплекса.
Подъёмно-погрузочное устройство может быть выполнено в различных конфигурациях. В том числе, в виде портальной конструкции, включающей подвешенную к силовым шпангоутам кузова модуля-эвакуатора несущую продольную балку с установленными перпендикулярно её продольной оси с возможностью поперечного смещения от приводов подвижными консолями с укреплёнными на их концах вертикальными телескопическими манипуляторами с пеноподающими трубами. На продольной балке устанавливают привод/приводы консолей и, также, могут быть установлены ёмкости с пенообразующим составом и протекторной жидкостью и запорно-регулирующая арматура. Портальная конструкция может соединяться с силовыми шпангоутами кузова модуля-эвакуатора посредством направляющих, перемещающихся от привода в подвешенных к силовым шпангоутам линейных подшипниках или в каретках с опорными роликами. Манипуляторы могут быть гидравлическими, пневматическими, тросовыми, зубчато-реечными или шнековыми. Гидронасосные или пневмонасосные станции к манипуляторам могут быть расположены в кузове модуля и соединяться с манипуляторами шлангами. Приводы тросовых, зубчато-реечных или шнековых манипуляторов располагают на консолях.
Для защиты лица раненого/пострадавшего от пены подъёмно-погрузочное устройство снабжают саморазворачивающейся пневматической конструкцией, которая, при подаче в неё воздуха, опускается на голову раненого/пострадавшего, фиксирует голову и шею раненого/пострадавшего, а пневматический решётчатый шлем-забрало обеспечит свободное дыхание раненого/пострадавшего и установку приборов для подачи дыхательной смеси при любом положении лица раненого/пострадавшего. Пневматический фиксатор шейно-воротникового отдела может быть использован любой известной конструкции и изготовлен из любых традиционно применяемых в травматологии и в службе неотложной помощи материалов. Особенности конструкции пневматической конструкции и её применения в данном изобретении не рассматриваются.
Работает подобная система отделения тела раненого/пострадавшего от подложки и подъёма-погрузки в полость кузова модуля-эвакуатора следующим образом:
Модуль-эвакуатор прибывает на место расположения обнаруженного раненого/пострадавшего и занимает рабочее положение, при котором раненый/пострадавший оказывается расположенным под днищем кузова модуля между гусеничными движителями шасси. Створки днища кузова модуля-эвакуатора раздвигаются, а консоли с пеноподающими трубами перемещаются и занимают позиции соответственно с контуром расположения тела раненого/пострадавшего по данным тепловизионных датчиков сенсорной системы модуля-эвакуатора. При невозможности расположить кузов экипажа модуля-эвакуатора непосредственно над телом раненого/пострадавшего из-за препятствий для движителей или для кузова модуля, передняя (или задняя) часть кузова откидывается (или распахивается) и подъёмно-погрузочное устройство по направляющим выдвигается из кузова и занимаем положение над телом раненого/пострадавшего. После принятия подъёмно-погрузочным устройством рабочего положения, телескопические манипуляторы на консолях опускают свои нижние секции до упора в подложку вблизи тела раненого/пострадавшего, поперечные консоли сдвигаются до упора патрубков пеноподающих телескопических труб на секциях манипуляторов в места прилегания тела раненого/пострадавшего к подложке. При необходимости, в зависимости от положения тела и головы раненого/пострадавшего, электронное устройство управления по данным сенсорной системы вырабатывает команды на исполнительные органы и в район расположения шейно-воротникового отдела тела раненого/пострадавшего автоматически опускается пневматическая конструкция и создаёт защитную оболочку вокруг головы раненого/пострадавшего. Затем, в пеноподающие трубы подаётся протекторная жидкость, а вслед за ней и высокократная пена. Протекторная жидкость расправляет отрезки перфорированных шлангов, проталкивает их в зазор между телом раненого/пострадавшего и подложкой и сквозь перфорацию в стенках отрезков шлангов смачивает поверхности подложки и поверхности одежды или тела раненого/пострадавшего. Поступающая вслед за протекторной жидкостью высокократная пена проступает сквозь перфорацию и, расширяясь, заполняет всё пространство под телом раненого/пострадавшего сплошным слоем и полностью отделяет тело раненого/пострадавшего от подложки. После затвердевания пенная прокладка между телом раненого и подложкой образует фиксирующий тело раненого/пострадавшего ложементоподобный монолит. Манипуляторы подъёмно-погрузочного устройства втягивают свои нижние секции и поднимают раненого в полость кузова экипажа или, при наличии, в транспортно-медицинскую капсулу. Створки в днище кузова закрываются и фиксируются в закрытом положении обычно применяемыми в таких устройствах замками.
Кузов модуля-эвакуатора и/или транспортно-медицинскую капсулу изготавливают и оснащают оборудованием с учётом необходимости обеспечения контроля сердечной деятельности и дыхания, фиксации ранений для остановки кровотечений, подачи дыхательной смеси, введения противошоковых инъекций и амортизации толчков и тряски при транспортировке. Оборудование и применяемые препараты выбирают из множества известных образцов мобильного медицинского оборудования и средств для оказания экстренной медицинской помощи в полевых условиях.
Известен патент изобретение РФ №2724824 C2 «Агрегат для перемещения лежачих больных - больничный робот». Конструкция пенетраторного стола-платформы соответствует технической идее пенетраторного стола-платформы с виброходным покрытием и отличается тем, что материалы жёсткой основы и покрытия стола-платформы допускают его использование на открытом воздухе при различных метеорологических условиях и включает несущую и нагрузочную или нагрузочные конструкции, установленные на самоходном или на несамоходном статически уравновешенном шасси, оснащенной или не оснащенной электронным устройством управления, сенсорной системой на основе компьютерного зрения, навигационной и позиционирующей системами, системой дистанционного управления и блоком интеллектуального принятия решений и выработки управляющих сигналов для приводов агрегата по результатам обработки информации от сенсорной, навигационной и позиционирующей систем и от установленной на устройстве управления компьютерной программы с выполняемой миссией, а на несущей конструкции, которого установлены устройства управляемого изменения высоты положения и угла наклона нагрузочной или нагрузочных конструкций, при этом агрегат для перемещения лежачих больных имеет вид установленной или установленных на шасси стойки или стоек с устройствами управляемого изменения высоты положения и угла наклона нагрузочной конструкции, а нагрузочная конструкция имеет вид стола-платформы со страховочными ремнями и вибраторами и с виброходным покрытием в виде эластичного ворса или наклонных параллельных гребней.
Отделение тела раненого/пострадавшего от подложки и подъём в кузов транспортного средства осуществляется пенетраторным столом-платформой, самозадвигающимся в зазор между телом раненого/пострадавшего и подложкой, на которой тело покоится. Стол-платформа включена в конструкцию установленного в кузове модуля-эвакуатора подъёмно-погрузочного устройства с возможностью выдвижения из кузова и пенетрации под тело раненого/пострадавшего.
Для этого стол-платформу выполняют в виде тонкого листа из материала с высокой механической жёсткостью, на верхнюю поверхность которого наносят ворсообразное покрытие в виде коротких наклонных щетинок из эластичного материала, или покрывают эластичным материалом с рубчатой поверхностью из параллельных наклонных гребней (далее – виброходное покрытие). Виброходное покрытие выполняют с локально ориентированными наклонами ворса или гребней для обеспечения позиционирования тела раненого/пострадавшего относительно продольной оси стола-платформы. Стол-платформу снабжают виброприводом, опорными роликами или линейными подшипниками для обеспечения управляемого перемещения по направляющим, укреплённым в кузове модуля-эвакуатора или в установленной в кузове транспортно-медицинской капсуле, и приводом для управляемого перемещения стола-платформы по направляющим. Транспортно-медицинская капсула устанавливается в кузове модуля-эвакуатора на направляющих с возможностью управляемого перемещения от привода. Конструкции вибропривода стола-платформы, привода для перемещения стола-платформы по направляющим и привода перемещения транспортно-медицинской капсулы могут быть любыми из известных устройств аналогичного назначения и соответствующей мощности и выбираются по техническим условиям применения соответственно климатическим условиям эксплуатации спасательного комплекса.
Устройство приводится в действие после прибытия модуля-эвакуатора на место расположения раненого/пострадавшего и позиционирования модуля относительно раненого/пострадавшего. Для этого устройство управления модулем вырабатывает команды управления приводам для откидывания передней части кузова или раскрытия носовых створок и для выдвижения транспортно-медицинской капсулы и/или пенетраторного стола-платформы до упора края стола-платформы в место сопряжения тела раненого/пострадавшего в подложку и включают вибропривод стола-платформы и медленную подачу стола-платформы в направлении расположения центра массы тела раненого/пострадавшего. В результате взаимодействия виброходного покрытия вибрирующего с малой амплитудой стола-платформы с поверхностью подложки и поверхностью тела или одежды раненого/пострадавшего возникает результирующая пропульсивная сила, приложенная со стороны пенетраторного стола к сопряжённым с поверхностью стола-платформы участкам поверхности тела или с одеждой раненого/пострадавшего и направленная по углу отклонения эластичных элементов - щетинок или гребней - виброходного покрытия стола-платформы от нормали к плоскости стола-платформы. Под действием этой силы тело раненого/пострадавшего надвигается на стол-платформу с одновременной ориентацией относительно оси стола-платформы и подбором конечностей. Для этого локальная ориентация наклона эластичных элементов виброходного покрытия распределяется таким образом, чтобы обеспечить необходимую ориентацию тела и конечностей раненого/пострадавшего относительно оси стола-платформы для обеспечения безопасной транспортировки раненого/пострадавшего, возможности обследования тела, фиксирования местоположения и характера повреждений и применения средств остановки кровотечения, наложения тампонов, дыхательных приспособлений и проведения противошоковых воздействий.
После полного отделения тела раненого/пострадавшего от подложки пенетраторный стол-платформа по направляющим задвигают в кузов модуля-эвакуатора, или, при наличии, в транспортно-медицинскую капсулу.
Транспортно-медицинскую капсулу по своим направляющим задвигают в кузов модуля-эвакуатора, пневматический фиксатор шейно-воротникового отдела фиксирует голову и шею раненого/пострадавшего, а пневматический решётчатый шлем-забрало образует защитную оболочку перед лицом раненого/пострадавшего для обеспечения свободного дыхания раненого/пострадавшего и установку приборов для подачи дыхательной смеси при любом положении лица раненого/пострадавшего. После выполнения операций по фиксированию головы и шеи раненого/пострадавшего модуль-эвакуатор начинает движение и транспортирует раненого/пострадавшего к месту оказания квалифицированной помощи.
Высокую автономность и эффективность применения мультиагентного робототехнического поисково-спасательного комплекса обусловливает то, что управляющие команды на приводы исполнительных механизмов модулей комплекса вырабатывает собственная система управления модуля по целеопределяющим командам распределённой системы управления осуществлением миссии-предназначения комплекса.
Программа распределённой системы управления мультиагентным комплексом включает, в том числе, программу поэтапного выполнения миссий посредством коллективной выработки целеопределяющих задач системам управления отдельных модулей комплекса в режиме скользящего целеполагания в соответствии с результатами стратегического планирования осуществления миссии и с учётом результатов анализа текущего состояния системы «комплекс-цель миссии». Для этого анализируются формализованные, посредством онтологизации, отношения показаний датчиков сенсорной системы комплекса с онтологизированными текущим и целевым состоянием комплекса с учётом технического состояния модулей комплекса и оперативным планированием исполнения специальных алгоритмов коллективного взаимодействия модулей комплекса и взаимодействия модулей с объектами внешней среды. Специальные алгоритмы управления действиями модулей синтезирует распределённая система управления комплексом из модифицированных биоинспирированных алгоритмов локального взаимодействия модулей, хранящихся в библиотеке подпрограмм программы управления комплекса. Способ синтезирования заключается в достижении согласования онтологии синтезируемого специального алгоритма с онтологией задачи перевода текущего состояния системы «модуль-цель миссии» в целевое состояние.
Схематические изображения элементов конструкций робототехнического комплекса поясняются чертежами фиг. 1 – 10.
На фиг. 1 схематически представлен вид спереди конструкции модуля–эвакуатора с пенетраторным столом-платформой в походном состоянии с погруженным в транспортно-медицинскую капсулу раненым/пострадавшим. На фиг. обозначены: 1 - кузов модуля-эвакуатора; 2 – гусеничная тележка псевдоодноосного шасси модуля-эвакуатора; 4 – иллюминатор на откидной передней части кузова; 5 – полость транспортно-медицинской капсулы; 6 – пенетраторный стол-платформа; 7 – направляющая пенетраторного стола-платформы; 8 – линейный подшипник на раме модуля-эвакуатора; 9 – поперечная балка несущей рамы модуля-эвакуатора; 10 – направляющая кузова модуля-эвакуатора; 13 – пружины подвески гусеничных тележек на вертикальной стойке несущей рамы модуля-эвакуатора.
На фиг. 2 схематически представлен вид сбоку конструкции модуля: 3 – передняя откидная часть кузова; позиции 1, 2, 4, 5, 6, 7, 8, 9, 10 соответственно позициям на фиг 1; 11 –место расположения вибропривода стола-платформы.
На фиг. 3 схематически представлен вид конструкции модуля –эвакуатора с пенетраторным столом-платформой в состоянии пенетрации стола-платформы и погружения раненого/пострадавшего на стол-платформу. На фиг. представлены: 3 – откинутая для выдвижения транспортно-медицинской капсулы передняя часть кузова; 12 – откинутая для выдвижения стола-платформы передняя часть транспортно-медицинской капсулы.
На фиг. 4 схематически представлен вид сверху модуля-эвакуатора с погруженным в транспортно-медицинскую капсулу раненым-пострадавшим.
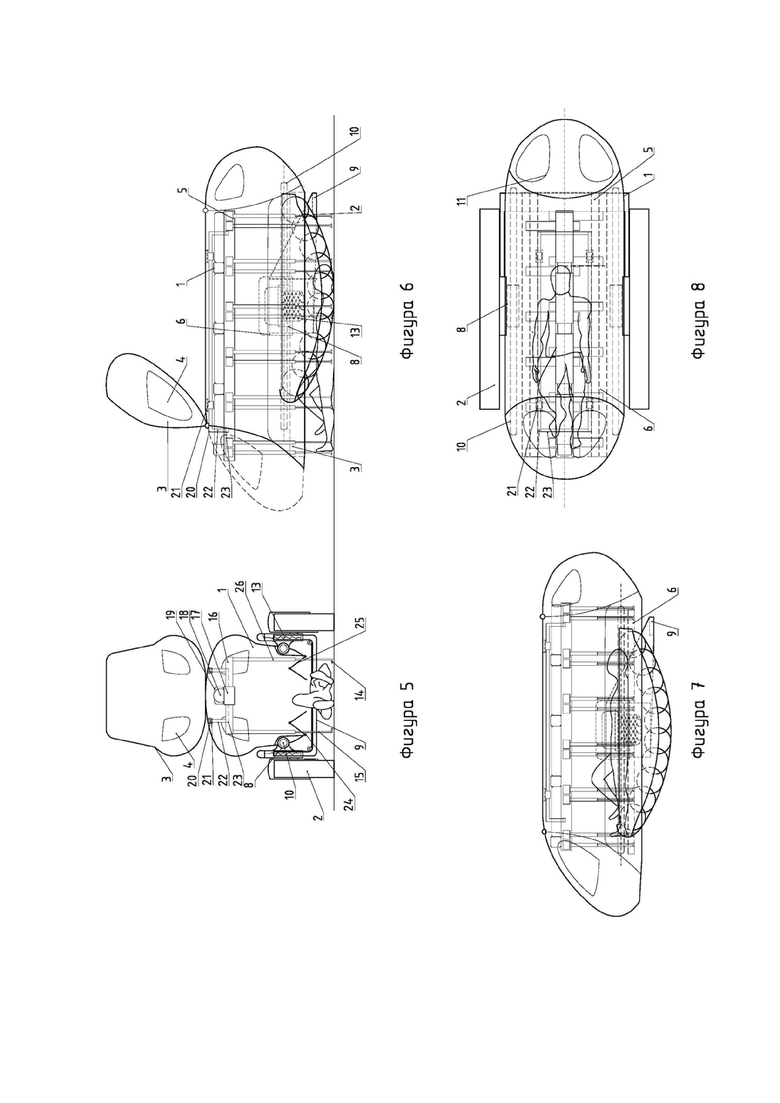
На фиг. 5 схематически представлен вид спереди модуля-эвакуатора с подъёмно-погрузочным устройством с запенивающим устройством в состоянии готовности к сдвижению поперечных консолей до упора патрубков пеноподающих телескопических труб на секциях манипуляторов в места прилегания тела раненого/пострадавшего к подложке. Створки 25 в днище кузова модуля изображены в полуоткрытом состоянии для демонстрации их эффективности. На фигуре обозначены: 13 - пружины мягкой подвески гусеничной тележки на вертикальной стойке рамы; 14 – патрубок подачи протекторной жидкости и пенообразующего раствора; 15 – нижняя секция телескопического манипулятора с пеноподающей трубкой; 16 – поперечные консоли на несущей балке подъёмно-погрузочного устройства; 17 – несущая балка; 18 – примерное месторасположение двигателей приводов поперечных консолей; 19 – примерное месторасположение ёмкостей с протекторной жидкостью и пенообразующим раствором; 20 – примерное месторасположение направляющих подъёмно-погрузочного устройства; 21 – месторасположение линейных подшипников на силовых шпангоутах конструкции кузова; 22 – тяга подвески продольной балки подъёмно-погрузочного устройства к направляющим; 23 – поперечный рычаг подвески подъёмно-погрузочного устройства к направляющим; 24 – комлевый шарнир створки в днище кузова; 25 – комлевая секция створки; 26 – верхняя секция телескопического манипулятора подъёмно-погрузочного устройства.
На фиг. 6 схематически представлен вид сбоку модуля-эвакуатора с подъёмно-погрузочным устройством с запенивающим устройством в состоянии готовности к запениванию зазора между телом раненого/пострадавшего и подложкой для последующего подъёма раненого/пострадавшего в кузов модуля-эвакуатора. Показано примерное расположение поперечной балки несущей рамы, смещённой для освобождения доступа к раненому/пострадавшему и его подъёма в кузов.
На фиг. 8 представлен вид сверху модуля-эвакуатора с погружённым раненым/пострадавшим.
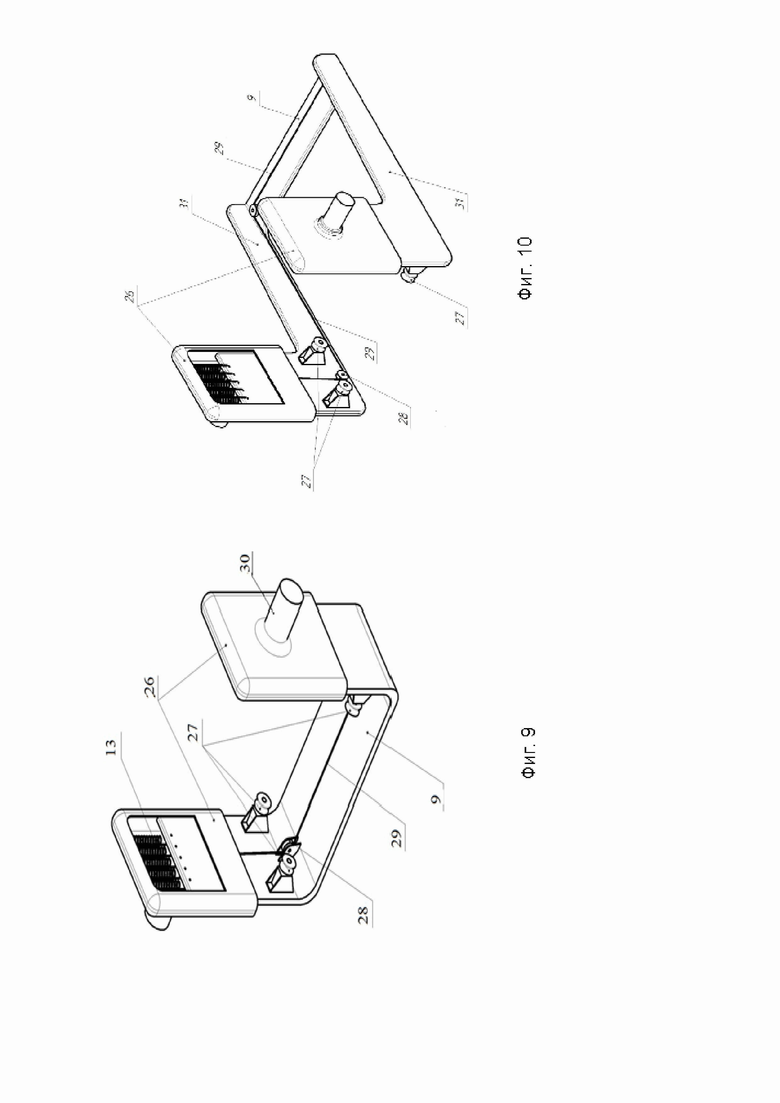
На фиг. 9 представлен примерный вид несущей рамы модуля-эвакуатора с опорными роликами для направляющих кузова, включающей: 9 – поперечная балка несущей рамы; 13 – пружины мягкой подвески; 26 – каретки мягкой подвески; 27 – опорные ролики; 28 – блок троса поперечной устойчивости; 29 – трос поперечной устойчивости; 30 – условное изображение кронштейна соединения каретки мягкой подвески с гусеничной тележкой.
На фиг. 10 представлен общий вид несущей рамы модуля-эвакуатора со смещённой поперечной балкой. Позиция 31 на Фигуре 10 обозначает примерный вид продольных балок рамы, соединяющих вертикальные стойки со смещенной поперечной балкой рамы.
Технический результат от применения комплекса заключается, во-первых, в предотвращении угроз огневого поражения личного состава поисково-спасательных и санитарных подразделений в ходе проведения поиска и эвакуации раненых. Во-вторых – в сокращении времени доставки раненых/пострадавших к месту оказания квалифицированной помощи. В-третьих – в повышении эффективности проведения поисково-спасательных операций за счёт предоставлении возможности организации массового поиска и эвакуации раненых/пострадавших посредством простого наращивания количества безлюдной робототехники без привлечения дополнительного личного состава спасательных служб.
| название | год | авторы | номер документа |
|---|---|---|---|
| САНИТАРНЫЙ ТРАНСПОРТ "АКАДЕМИК ЛИТВИНОВ" | 2002 |
|
RU2254115C2 |
| МОБИЛЬНЫЙ КОМПЛЕКС НАЗЕМНОЙ ПОИСКОВО-СПАСАТЕЛЬНОЙ КОМАНДЫ | 2018 |
|
RU2697003C1 |
| УСТРОЙСТВО ПОДВИЖНОГО МЕДИЦИНСКОГО КОМПЛЕКСА | 1996 |
|
RU2144812C1 |
| Мобильный комплекс для ремонтной или поисковой команды | 2020 |
|
RU2767222C1 |
| СПОСОБ ПРОВЕДЕНИЯ ПОИСКОВО-СПАСАТЕЛЬНЫХ РАБОТ | 2018 |
|
RU2694528C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОЙ ЭВАКУАЦИИ НА БАЗЕ РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА | 2024 |
|
RU2838648C1 |
| МОБИЛЬНЫЙ ЛЕЧЕБНО-ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС ТЕРАПЕВТИЧЕСКОГО ПРОФИЛЯ | 2008 |
|
RU2365515C1 |
| Робототехнический комплекс для безлюдного возведения строений/укрытий на Луне | 2020 |
|
RU2751836C1 |
| ЭВАКУАЦИОННЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2023 |
|
RU2824684C1 |
| Наземный роботизированный комплекс | 2023 |
|
RU2819223C1 |

Мультиагентный робототехнический поисково-спасательный комплекс включает стационарные полуавтономные модули для обслуживания и обеспечения работоспособности мобильных автономных модулей комплекса - подразделений автономных воздушных и наземных поисково-разведывательных модулей, мобильных модулей-эвакуаторов комплекса, выгрузки транспортно-медицинских эвакуационных капсул с ранеными/пострадавшими из модулей-эвакуаторов. Оборудование модулей-эвакуаторов включает подъемно-погрузочные системы с транспортно-медицинскими капсулами и медицинское оборудование для оказания первичной медицинской помощи раненым/пострадавшим во время транспортировки из опасной зоны к месту оказания квалифицированной помощи. Наземные модули-эвакуаторы агрегатируют на псевдоодноосных гусеничных шасси и оснащают возимым подъемно-погрузочным устройством в виде пенетраторного стола-платформы с транспортно-медицинской капсулой, или съемным элеватором с пеноподающими устройствами и системой подъемных телескопических штанг с саморазворачивающимися перфорированными мягкими насадками для подачи быстротвердеющей пены в зазор между телом раненого/пострадавшего и подложкой. Технический результат – исключение огневого поражения личного состава поисково-спасательных и санитарных подразделений в ходе проведения поиска и эвакуации раненых, сокращение времени доставки раненых/пострадавших к месту оказания квалифицированной помощи, повышение эффективности проведения поисково-спасательных операций без привлечения дополнительного личного состава спасательных служб. 9 з.п. ф-лы, 10 ил.
1. Мультиагентный робототехнический поисково-спасательный комплекс, включающий стационарные полуавтономные модули для перезарядки и замены аккумуляторных батарей и пополнения боекомплекта вооружения на мобильных автономных модулях комплекса, замены картриджей и заправки расходных материалов на мобильных модулях-эвакуаторах комплекса, выгрузки транспортно-медицинских эвакуационных капсул с ранеными/пострадавшими из модулей-эвакуаторов, подразделений автономных воздушных и наземных поисково-разведывательных модулей для разведки местности, поиска раненых/пострадавших, поиска и нейтрализации источников огневого воздействия на модули комплекса, прикрытия модулей-эвакуаторов от огневого поражения и оказания содействия при освобождении раненых/пострадавших от ограничивающих подвижность объектов, наземных и воздушных модулей-эвакуаторов для доставки к раненым/пострадавшим подъёмно-погрузочного оборудования и транспортно-медицинских эвакуационных капсул, погрузки раненых/пострадавших в транспортно-медицинскую эвакуационную капсулу и транспортировки к месту оказания раненым-пострадавшим квалифицированной помощи, в которых воздушные поисково-разведывательные модули оснащены дополнительно лазерными, и/или инфракрасными, и/или акустическими системами обнаружения источников возможного огневого воздействия на модули комплекса и оснащаются вооружением безоткатного действия и/или планирующими управляемыми/самонаводящимися малокалиберными бомбами и ракетами, а наземные поисково-разведывательные модули оснащаются также обычным огнестрельным вооружением, а оборудование модулей–эвакуаторов включает подъёмно-погрузочные системы с транспортно-медицинскими эвакуационными капсулами и медицинское оборудование для оказания первичной медицинской помощи раненым/пострадавшим во время транспортировки из опасной зоны к месту оказания квалифицированной помощи.
2. Комплекс по п. 1, отличающийся тем, что наземные поисково-разведывательные модули размещают на колесных с количеством колес четыре и больше, гусеничных и колесно-гусеничных шасси или одноосных шасси с динамическим управлением остойчивостью, а наземные мобильные модули-эвакуаторы агрегатированы на гусеничных псевдоосных шасси.
3. Комплекс по п. 1 или 2, отличающийся тем, что наземные мобильные модули-эвакуаторы оснащены возимым подъёмно-погрузочным устройством с эвакуационной транспортно-медицинской капсулой и пенетраторным столом-платформой, защитным колпаком и контейнером с устройствами обеспечения свободного дыхания и безопасного положения головы раненого, или оснащённой элеватором с пеногенераторным устройством с возможностью отделения раненого/пострадавшего от подложки и погрузки в транспортную капсулу наземного мобильного модуля-эвакуатора.
4. Комплекс по п. 1 или 2, отличающийся тем, что наземные мобильные поисково-разведывательные модули содержат автономные и дистанционные системы наведения и приведения в действие огнестрельного оружия.
5. Комплекс по п. 1 или 2, отличающийся тем, что наземные мобильные модули-эвакуаторы оснащены возимым подъёмно-погрузочным устройством с приведённым от вибратора выдвижным пенетраторным столом-платформой с виброходным покрытием.
6. Комплекс по п. 1 или 2, отличающийся тем, что наземные мобильные модули-эвакуаторы оснащены съёмным элеватором с системой телескопических штанг с мягкими насадками для подачи жидких и жидкообразных материалов и пенообразующих смесей в зону сопряжения тела раненого/пострадавшего с подложкой.
7. Комплекс по любому из пп. 1, 2, 5 и 6, отличающийся тем, что оборудование транспортно-медицинских эвакуационных капсул включает пневматические фиксаторы для шейно-воротникового отдела раненого/пострадавшего и пневматические шлемы-забрала для дыхания раненого/пострадавшего и приборы для подачи дыхательной смеси к лицу раненого/пострадавшего.
8. Комплекс по любому из пп. 1, 2, 5 и 6, отличающийся тем, что оборудование кузова наземного мобильного модуля-эвакуатора или транспортно-медицинской эвакуационной капсулы включает аппаратуру для подачи дыхательных смесей и дезинфекции.
9. Комплекс по п. 1 или 2, отличающийся тем, что наземные поисково-разведывательные модули оснащены дополнительно манипулятором для силового воздействия на ограничивающие подвижность раненого/пострадавшего объекты и/или оказания согласованных коллективных динамических воздействий на внешние объекты при расчистке препятствий на пути к раненому/пострадавшему.
10. Комплекс по п. 1 или 2, отличающийся тем, что содержит распределённую систему управления комплекса; системы управления приводами исполнительных механизмов модулей комплекса.
| Мультиагентная робототехническая система | 2017 |
|
RU2658684C1 |
| РОБОТ-САПЕР | 2008 |
|
RU2405122C2 |
| Бесконтактное реле частоты | 1949 |
|
SU82871A1 |
| RU 2009106990 A, 10.09.2010 | |||
| CN 106054842 A, 26.10.2016 | |||
| RU 2016125031 A, 27.12.2017 | |||
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ РОБОТ | 2011 |
|
RU2492620C2 |
| RU 2014137078 A, 10.04.2016 | |||
| US 7559103 B2, 14.07.2009 | |||
| US 6964073 B1, 15.11.2005. | |||

