Область техники, к которой относится изобретение
Группа изобретений относится к медицинской технике, в частности к эндоскопическому хирургическому аппарату с использованием механизма параллельной кинематики (МПК) с встроенным устройством сопряжения и механизмом возвратно-поступательного движения инструмента по направляющим, способному манипулировать в телероботизированной системе. Настоящая группа изобретений может быть применима для эндоскопической и открытой хирургии, а также в микрохирургии и нейрохирургии с применением робототехники.
Предпосылки создания изобретения
Применение манипуляторов в хирургии становится все более актуальной научной и технической задачей. Это обусловлено необходимостью удаленного расположения хирурга, а также требованиями минимального воздействия на ткани, расположенные рядом с полем операции. Такие устройства могут иметь последовательную или параллельную структуру.
Преимуществами механизмов параллельной структуры являются высокая точность и эффективность, а также относительно малые габариты и вес. Кроме того, механизмы отличаются высокой жесткостью, что обусловлено работой телескопического устройства на растяжение-сжатие и равномерным распределением усилий по всей структуре.
Все известные механизмы параллельной структуры построены на основе различных сочетаний штанг и шарниров.
На сегодняшний день механизмы параллельной кинематики (МПК) представлены широким разнообразием их исполнения. Механизмы параллельной структуры (МПС) можно классифицировать по следующим признакам:
- по виду штанг;
- по количеству штанг;
- по характеру расположения шарниров на платформе и основании;
- по расположению шпинделя и др.
По виду штанг разделение происходит:
- на механизмы со штангами управляемой переменной длины (бипод, трипод, пентапод, гексапод, «ножницы»);
- на механизмы со штангами постоянной длины (линапод, биглайд, триглайд, ортоглайд, гексаглайд, ротопод, «дельта», four-pod).
Механизм трипод состоит из трех симметрично установленных телескопических штанг, связанных шарнирно одним концом с выходным звеном, а другим - с неподвижным основанием. Эти штанги приводятся от отдельных двигателей и работают на растяжение - сжатие. Дополнительная неприводная штанга расположена в центре. Она воспринимает изгибные деформации от инструментальной головки и поэтому должна иметь значительно большие размеры по сравнению с приводными штангами.
Гексапод (от гекса - шесть) выполнен на базе шести механизмов поступательного перемещения.
Механизмы типа трипод и гексапод обладают высокой жесткостью. Триподы конструктивно проще гексаподов и более приспособлены к практическому применению. Гексаподы, оснащаемые шестью штангами, требуют значительно более сложного программного обеспечения.
При использования гексаподных и триподных систем в малоинвазивной роботизированной хирургии решаются следующие технические задачи:
1. Повышение точности проведения хирургической процедуры. Задача повышения точности проведения хирургической процедуры решается следующими компаниями: MAZOR ROBOTICS (US 9492241, US 8518051, US 2012143084, US 7887567), CHONGQING INSTITUTE GREEN & INTELLIGENT TECHNOLOGY CAS (CN 204428164), UNIVERSITY OF SHANGHAI FOR SCIENCE & TECHNOLOGY (CN 104644267), URS UNIVERSAL ROBOT SYSTEMS (EP 1212002), FRAUNHOFER (DE 19649082), SOOCHOW UNIVERSITY (CN 102968665), BEIHANG UNIVERSITY OF AERONAUTICS & ASTRONAUTICS (CN 100496430).
2. Повышение надежности манипулятора. Решение задачи повышения надежности манипулятора представлено в патенте компании CHONGQING INSTITUTE GREEN & INTELLIGENT TECHNOLOGY CAS (CN 204428164), а также авторами GALIMOV OLEG VLADIMIROVICH, SHKUNDIN ANTON VLADIMIROVICH и SIRUSIN TIMUR ANVAROVICH в патенте RU 2491161.
3. Повышение жесткости. Повышение жесткости достигается такими компаниями, как JOHNS HOPKINS UNIVERSITY (WO 201715235) и UNIVERSITY OF SHANGHAI FOR SCIENCE & TECHNOLOGY (CN 104644267).
4. Уменьшение размеров устройства. Уменьшение размеров манипулятора достигается в патентах компаний JOHNS HOPKINS UNIVERSITY (US 9554865), ZHEJIANG UNIVERSITY OF SCIENCE AND TECHNOLOGY (CN 204207850, CN 104337579), NOVINT TECHNOLOGIES (US 8806974), FUKUSHIMA NATIONAL UNIVERSITY (WO 2011155070), PRIETO DOERFEL DANIEL (DE 19606521).
5. Упрощение конструкции манипулятора. Способы усовершенствования конструкции манипулятора предложены в патентах следующих компаний: JOHNS HOPKINS UNIVERSITY (WO 201715235), SCHWAB MARTIN (US 9109743), NOVINT TECHNOLOGIES (US 8806974), URS UNIVERSAL ROBOT SYSTEMS (EP 1212002).
6. Снижение стоимости устройства. Задача снижения стоимости решается компаниями JOHNS HOPKINS UNIVERSITY (US 9554865), NOVINT TECHNOLOGIES (US 8806974), URS UNIVERSAL ROBOT SYSTEMS (EP 1212002), а также авторами GALIMOV OLEG VLADIMIROVICH, SHKUNDIN ANTON VLADIMIROVICH и SIRUSIN TIMUR ANVAROVICH в патенте RU 2491161.
7. Повышение степени гибкости при движении инструмента. Повышение гибкости достигается такими компаниями, как UNIVERSITY OF SHANGHAI FOR SCIENCE & TECHNOLOGY (CN 104644267), ZHEJIANG UNIVERSITY OF SCIENCE AND TECHNOLOGY (CN 204207850, CN 104337579).
8. Обеспечение безопасной эксплуатации. Решение задачи обеспечения безопасности при эксплуатации ZHEJIANG UNIVERSITY OF SCIENCE AND TECHNOLOGY (CN 204207850, CN 104337579), URS UNIVERSAL ROBOT SYSTEMS (EP 1212002).
9. Уменьшение времени, затрачиваемого на проведение операции. Компанией JOHNS HOPKINS UNIVERSITY в WO 2016086049 предложена режущая машина для изменения размеров имплантатов во время операции.
10. Компенсация систематических погрешностей гексапода. Способ компенсации систематических погрешностей гексапода описывается в WO 201764392 компании MICRO CONTROLE SPECTRA PHYSICS. Благодаря изобретению возможно компенсировать различные типы ошибок (связанные с геометрией устройства или его положением), таким образом, чтобы обеспечить особенно точный гексапод (с точным и контролируемым перемещением подвижной каретки относительно неподвижной базы).
11. Повышение манипуляционных возможностей. Повышение манипуляционных возможностей инструментов достигается такими компаниями, как ВОЕНМ (DE 102010018095), COLUMBIA UNIVERSITY (US 2010010504), FANUC (US 2008257092), INNOMEDIC (DE 10307054), а также авторами GALIMOV OLEG VLADIMIROVICH, SHKUNDIN ANTON VLADIMIROVICH и SIRUSIN TIMUR ANVAROVICH в патенте RU 2491161.
Известен манипулятор роботизированного хирургического комплекса, описанный в DE 19649082, включающий неподвижную платформу и подвижную платформу, которые соединяет между собой гексапод. Гексапод позволяет маневрировать положением подвижной платформой. Гексапод имеет в общей сложности шесть стержней. Эндоскопическое устройство установлено соосно внутри гексапода на подвижной платформе. Эндоскопическое устройство представляло собой трубчатый зонд диаметром от 2 до 3 мм.
Недостатком такого решения является жесткое крепление зонда на платформе гексапода, в связи с чем перемещение зонда происходит совместно с гексаподом. Это приводит к увеличению инерционных масс и, как следствие, к уменьшению точности перемещений в операционном поле. Для устранения этого недостатка необходимо конструктивно предусмотреть возможность автономного возвратно-поступательного движения зонда внутри гексапода. Также, представленный манипулятор имеет ограниченное применение, в данном случае для мониторинга, КТ, МРТ. Сама операция состоит из введения зонда через отверстие в черепной коробке. Контролируется процесс всей операции с помощью компьютерного томографа.
Хирургический инструмент известен из RU 2650201. Настоящее изобретение относится к хирургическим инструментам и, в различных конструкциях, к хирургическим режущим и сшивающим инструментам и кассетам со скобками для них, которые выполнены с возможностью разрезания и сшивания ткани скобками. Хирургический инструмент включает приводную систему, выполненную с возможностью выработки множества поворотных управляющих перемещений концевого эффекта, при этом приводная система инструмента приводится в движение с помощью узла двигателей. Приводная система разъемным образом соединена с узлом двигателей защелками, винтами и другими приспособлениями.
Недостатком такого решения является невозможность использования этого инструмента в роботизированном хирургическом комплексе. Описанный выше хирургический инструмент можно использовать только как ручной эндоскопический инструмент, в данном случае это «клип-аппликатор», позволяющий только резать и сшивать мягкие ткани. Также к недостаткам можно отнести конструктивную и технологическую сложность реализации устройства, так как для осуществления поворотов и управляющих перемещений шарнирных секций концевого эффектора применены мелкомодульные дифференциалы, которые сложны в изготовлении и трудоемки в сборке, что снижает надежность устройства.
Далее, концевой эффектор во время проведения хирургической операции находится в непосредственном взаимодействии с мягкими тканями, сосудами, тампонами, хирургическими нитями. Поэтому очень высока вероятность попадания или затягивания этих субстанций в зубчатый механизм конических дифференциалов, что приводит к заклиниванию механизма. Заклинивание не даст возможности вытягивать инструмент при замене инструмента или в экстренных случаях через троакар из операционной области, так как будет нарушена соосность шарнирных секций концевого эффектора со стволом инструмента.
Известна кинематическая схема концевого эффектора хирургического инструмента из US 2010004663, в которой используется тросовый механизм для вращения бранша и поворотного корпуса концевого эффектора. Для заделки двух тросов приходится делать соответственно две выемки в корневой зоне инструмента, что ослабляет конструкцию, а отсутствие запаса троса на поверхности бранша приводит к раскачке троса при вращении бранша и уменьшению срока службы и надежности.
Раскрытие сущности изобретения
Исходя из этого, цель рассматриваемого изобретения заключается в разработке автономного мобильного модуля роботизированного хирургического инструмента для выполнения хирургического вмешательства, содержащего усовершенствованный по сравнению с аналогами манипулятор хирургического инструмента на базе гексапода с встроенным узлом сопряжения, размещенным на подвижной платформе гексапода с приводом, являющегося постоянной частью конструкции, и сменным хирургическим инструментом, имеющего возможность возвратно-поступательного движения по направляющим, установленным перпендикулярно на подвижной платформе гексапода. Это позволяет расширить функциональные (манипуляционные) возможности и повысить точность позиционирования инструмента манипулятора по сравнению с аналогами и, главное - позволяет осуществить взаимодействие с ассистирующим роботизированным мехатронным хирургическим комплексом.
Технический результат, достигаемый при использовании заявляемого манипулятора хирургического инструмента в составе автономного мобильного модуля роботизированного хирургического инструмента (в дальнейшем - модуль), заключается в повышении точности позиционирования и в повышении манипуляционных возможностей хирургического инструмента.
Дополнительными преимуществом, возникающим при использовании заявляемого манипулятора с усовершенствованной конструкцией, является повышение точности проведения хирургической процедуры в рамках утвержденного плана (протокола) операции.
Точность позиционирования хирургического инструмента обеспечивается за счет использования в качестве манипулятора - гексапода, работающего по принципу параллельной кинематики и имеющего шести координатную систему микропозиционирования.
Повышение манипуляционных возможностей хирургического инструмента обеспечивается за счет наличия в конструкции манипулятора встроенного узла сопряжения привода с гексаподом (далее - узел сопряжения). Узел сопряжения обеспечивает линейное возвратно-поступательное перемещение постоянного привода со сменным хирургическим инструментом (далее - инструмент). Привод выполнен с возможностью приведения инструмента в движение, в том числе, обеспечивает собственное вращение инструмента вокруг его собственной оси. Таким образом, конструкция узла сопряжения, расположенного внутри гексапода и закрепленного на подвижной платформе гексапода, позволяет совершать возвратно - поступательное перемещение инструмента с его одновременным собственным вращением вокруг своей оси при различных отклонениях подвижной платформы гекспода. Это приводит к повышению числа степеней свободы устройства до W=10 по сравнению с аналогами, имеющими W=6, что упрощает конструкцию роботизированной руки манипулятора.
Повышение манипуляционных возможностей позволяет хирургу с меньшим числом движения джойстика со «стойки хирурга», доставлять хирургический инструмент в конкретную точку операционного поля.
Положительный эффект от крепления хирургического инструмента непосредственно к приводу, а не к подвижной платформе манипулятора, в отличие от известных представленных выше систем, позволяет перемещать инструмент отдельно от перемещения механизма параллельной кинематики, что приводит к уменьшению инерционных масс и, как следствие, к увеличению точности перемещения инструмента в операционном поле в процессе хирургической операции.
Все это в целом повышает точность проведения хирургической процедуры с использованием заявляемый манипулятора.
Более того, заявляемый манипулятор обеспечивает возможность применения разных типов хирургических инструментов, что расширяет возможность применения предлагаемого манипулятора робитизированного хирургического комплекса в различных областях хирургии, таких как урология, кардиология, микрохирургия, нейрохирургия и так далее.
Узел сопряжения можно рассматривать также как самостоятельное устройство с целой линейкой хирургических инструментов, применяемых при различных видах малоинвазивных операций с возможным применением на роботизированных руках типа «KUKA», «FANUC» совместно с устройствами с использованием механизмов параллельной кинематики (МПК) и аналогичных механизмов, а также на вновь проектируемых роботизированных хирургических комплексах.
Настоящее изобретение также относится к усовершенствованной конструкции сменного хирургического инструмента для использования его с приводом в автономном мобильном модуле роботизированного хирургического инструмента и непосредственно к усовершенствованной конструкции и кинематической схемы концевого эффектора упомянутого хирургического инструмента.
Технический результат, достигаемый при использовании заявляемой усовершенствованной конструкции сменного хирургического инструмента с усовершенствованной кинематической схемой и конструкцией концевого эффектора для использования с приводом в роботизированном хирургическом комплексе, заключается в расширении функциональных возможностей при проведении хирургических операций.
Дополнительных техническим результатом является повышение износостойкости, надежности, плавности хода и долговечности хирургического инструмента инструмента.
Привод и монтажная часть сменного хирургического инструмента со стороны приводных муфт имеют одинаковую форму и соединены таким образом, что приводные муфты инструмента соосны приводным муфтам привода, при этом приводные полумуфты серводвигателей передают крутящий момент на ответные полумуфты хирургического инструмента и обеспечивают раздельную или одновременную работу тросового механизма и механизма поворота концевого эффектора хирургического инструмента. Тросовый механизм передает тяговое усилие браншам концевого эффектора для соответствующего углового перемещения относительного корпуса концевого эффектора и корпусу концевого эффектора для его углового перемещения относительно его оси. Механизм поворота концевого эффектора передает поворотное движение корпусу концевого эффектора относительно его оси. Каждый механизм является независимым включается в работу по команде оперирующего хирурга.
Преимуществом такого крепления привода и монтажной части хирургического инструмента является его быстросъемность и возможность замены хирургического инструмента в случае необходимости
Положительный эффект и преимущества предлагаемой кинематической схемы концевого эффектора и инструмента следующие:
- в предлагаемой конструкции бранша, в отличие от аналога (US 2010/0004663 А1), используется один трос, который передает тяговое усилие и вращает бранш в обе стороны (в то время, как у аналога используется два троса для вращения, каждый трос передает тяговое усилие и вращает в одну сторону);
- в предлагаемой конструкции изменена заделка троса, в частности, трос фиксируется с помощью обжимной трубки в одной выемке в нижней, противоположной от корневой зоны инструмента, роликовой части бранша и каждая из ветвей укладывается встречно в свою канавку на бранше, т.е. совершает почти полный оборот, это позволяет при повороте троса из крайних положений иметь в запасе половину оборота в троса в канавке, это исключает возможность раскачки и обрыва троса, т.к. происходит равномерное распределение тягового усилия на радиальной поверхности бранша при знакопеременных направлениях вращения в месте заделке, что повышает износостойкость, надежность, плавность хода и долговечность инструмента.
Также увеличена вдвое по сравнению с аналогом толщина роликовой части бранша и корневой части инструмента, что повышает прочность инструмента без изменения внешних размеров корпусов шарниров концевого эффектора. В аналогичном инструменте для заделки двух тросов приходится делать соответственно две выемки в корневой зоне инструмента, что ослабляет конструкцию, а отсутствие запаса троса на поверхности бранша приводит к раскачке троса при вращении бранша и уменьшению срока службы и надежности.
Аналогичный принцип заделки троса применен и для вращения поворотного корпуса концевого эффектора хирургического инструмента (в то время как у аналога применяется тросовая система из двух тросов с заделкой в верхней точке роликовой части корпуса).
Изменение кинематической схемы концевого эффектора по сравнению с аналогом коснулось также размещения направляющих роликов, позволившего с меньшими радиальными изгибами тросовой системы передавать тяговые усилия к браншам инструмента и поворотному корпусу концевого эффектора, что повышает рабочий ресурс тросов.
Среди других преимуществ, описанных выше, предлагаемая разработка автономного мобильного модуля роботизированного хирургического инструмента, включающая манипулятор для управления движением привода со сменных хирургическим инструментом, содействует увеличенному разнообразию систем. Другими словами, данная разработка представляет систему пригодной для множества применений, особенно для минимальной инвазивной хирургии.
Краткое описание чертежей
Прилагаемые чертежи, которые включены в состав настоящего описания и являются его частью, иллюстрируют варианты осуществления изобретения и совместно с вышеприведенным общим описанием изобретения и нижеприведенным подробным описанием вариантов осуществления служат для пояснения принципов настоящего изобретения. На чертежах одинаковые позиции применяются для обозначения одинаковых деталей или элементов конструкции.
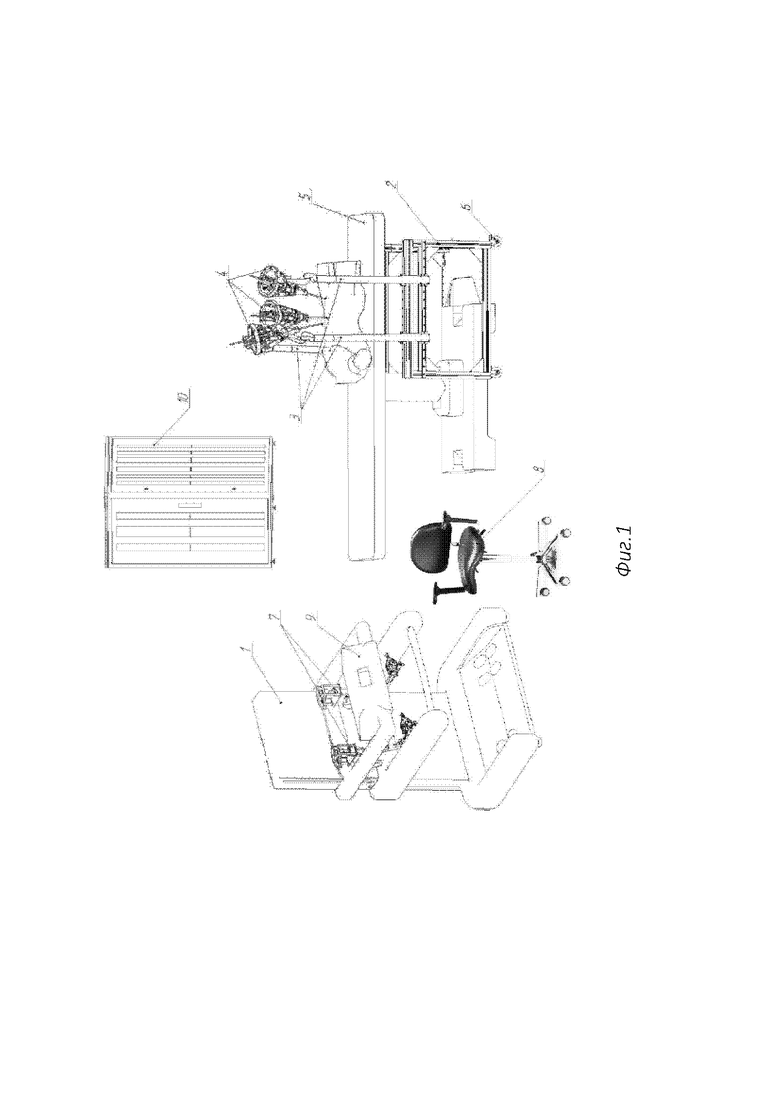
На фиг. 1 представлен перспективный вид ассистирующего роботизированного хирургического комплекса для выполнения минимальных инвазивных вмешательств, в частности, лапароскопических процедур.
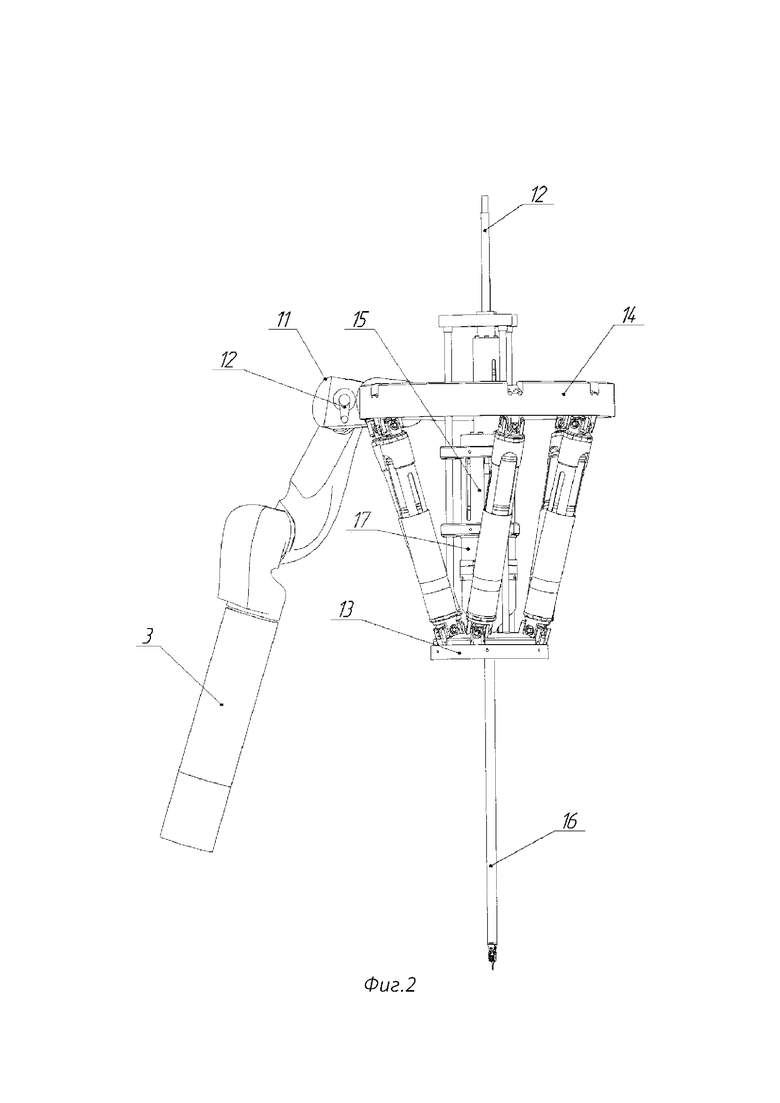
На фиг. 2 представлена конструкция и основные узлы автономного мобильного модуля роботизированного хирургического инструмента.
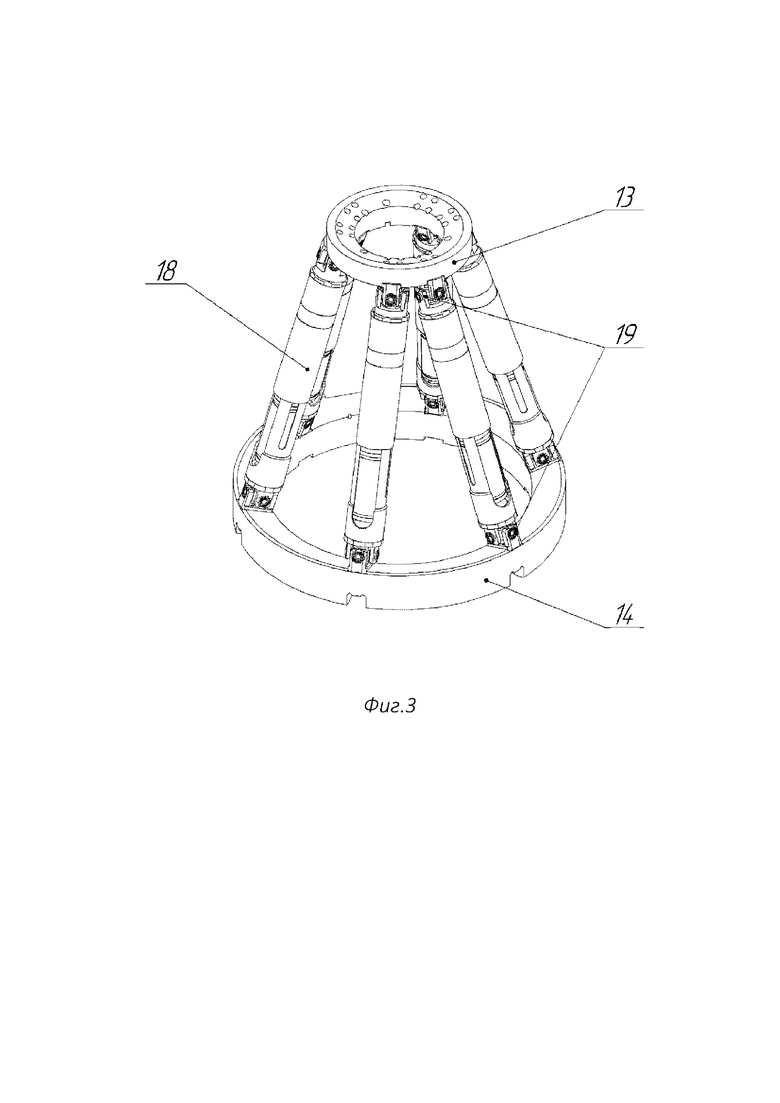
На фиг. 3 представлен общий вид гексапода в составе манипулятора.
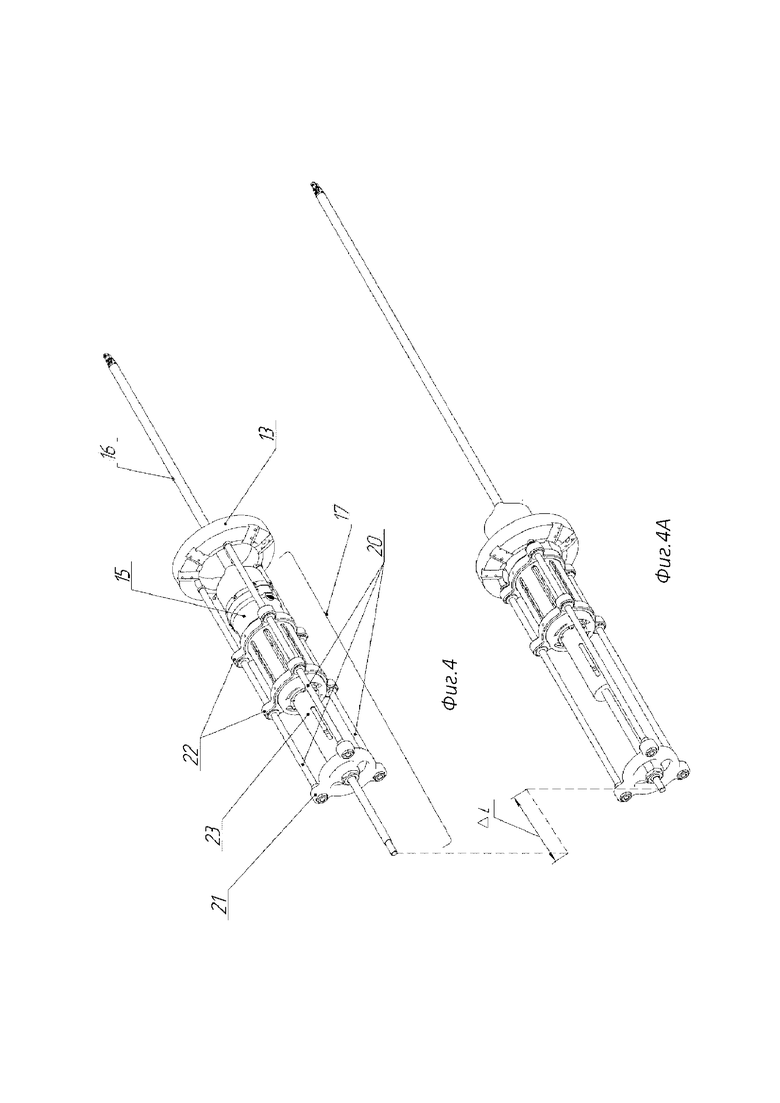
На фиг. 4 представлен общий вид узла сопряжения привода со сменным хирургическим инструментом с гексаподом.
На фиг. 4А представлен общий вид узла сопряжения привода со сменным хирургическим инструментом с гексаподом, когда привод со сменным хирургическим инструментом находится в выдвинутом вперед положении.
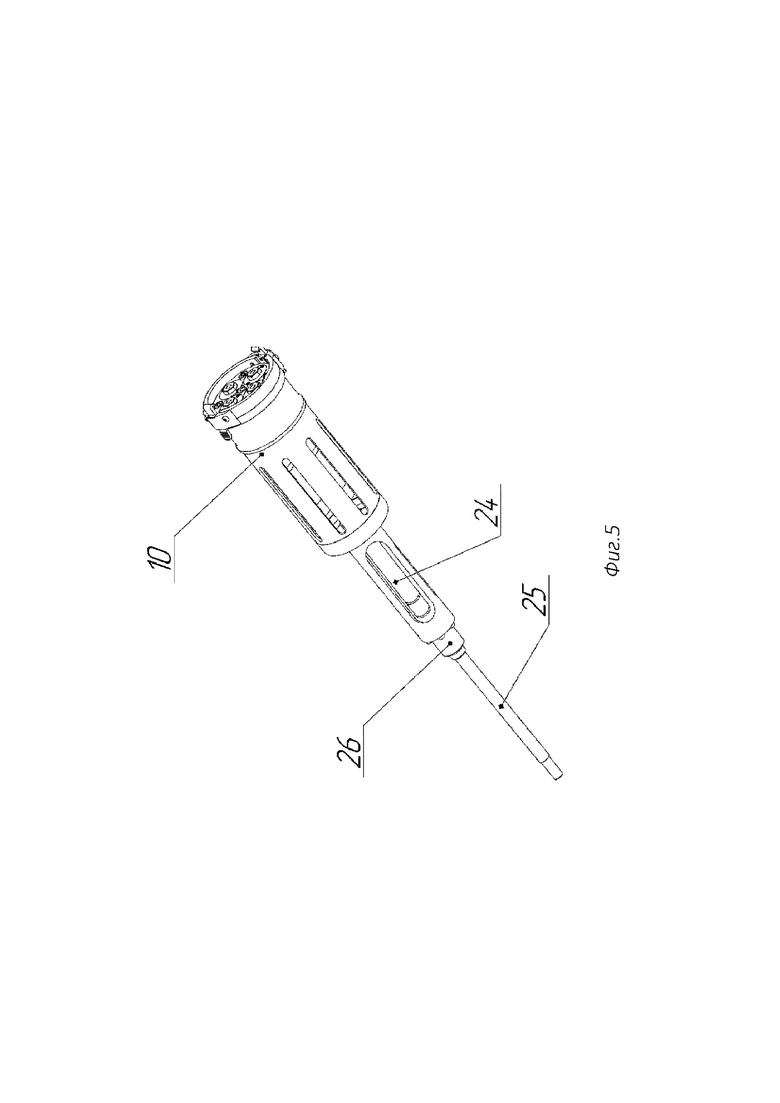
На фиг. 5 представлен конструктивный вид исполнительного механизма узла сопряжения.
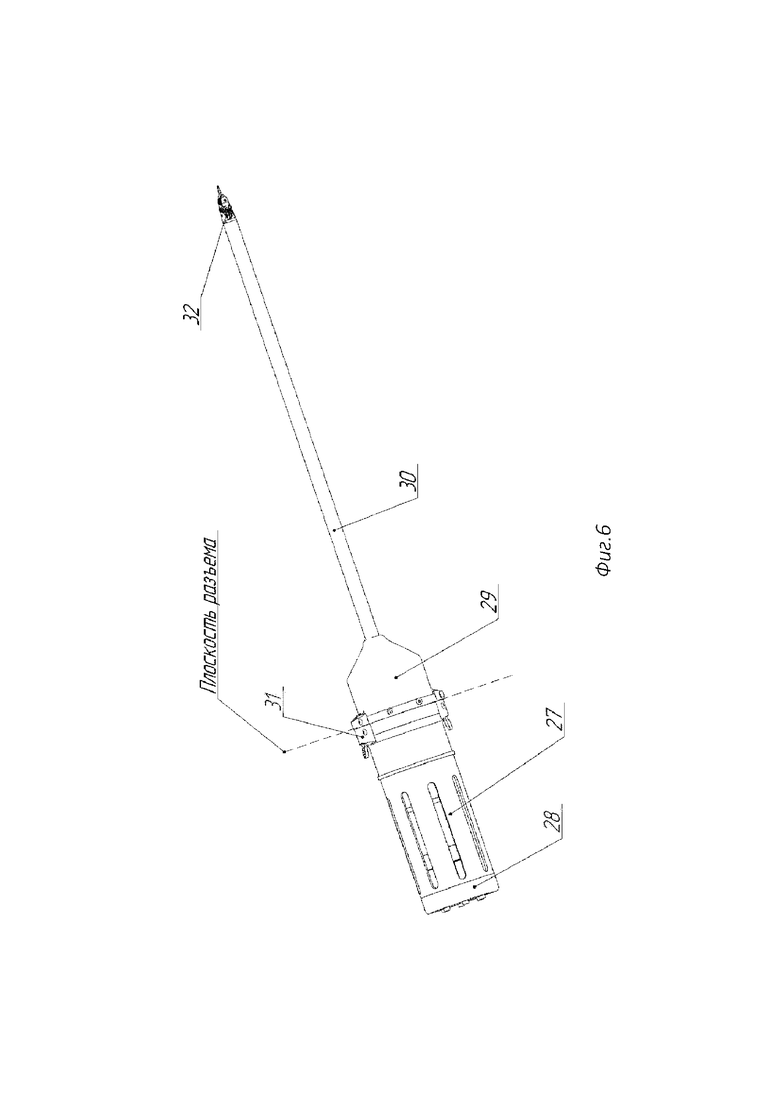
На фиг. 6 представлен общий вид привода со сменным хирургическим инструментом.
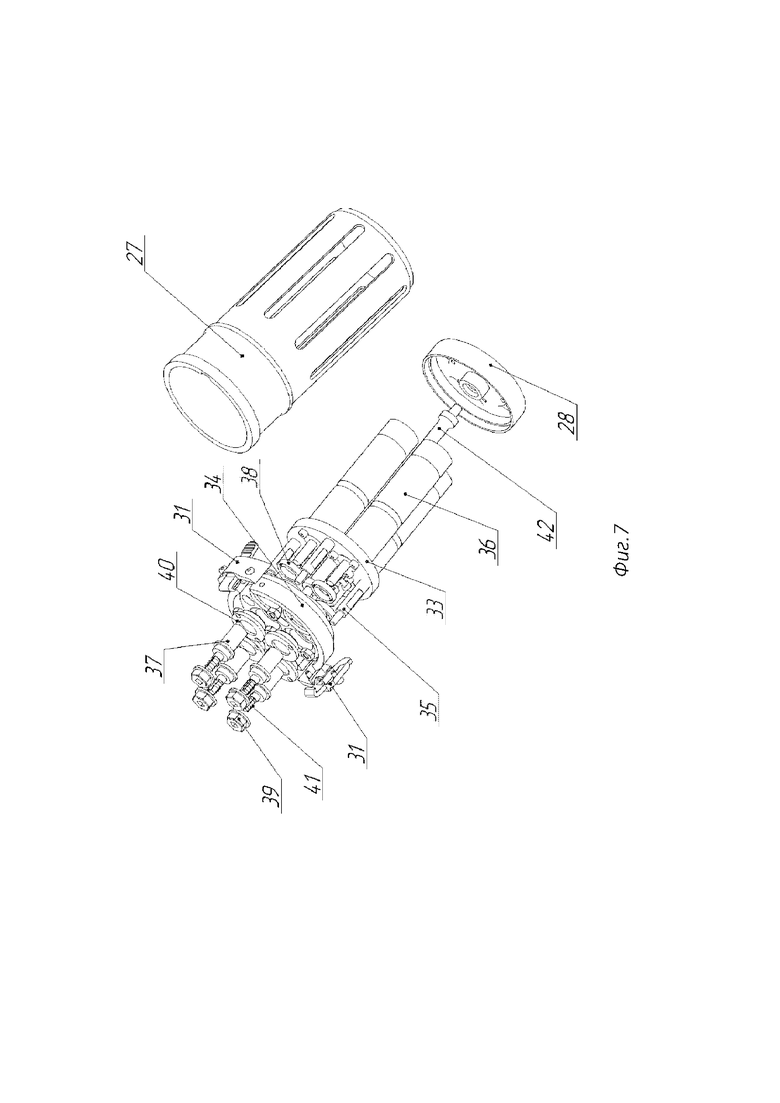
На фиг. 7 представлена конструкция привода с пространственным разделением деталей.
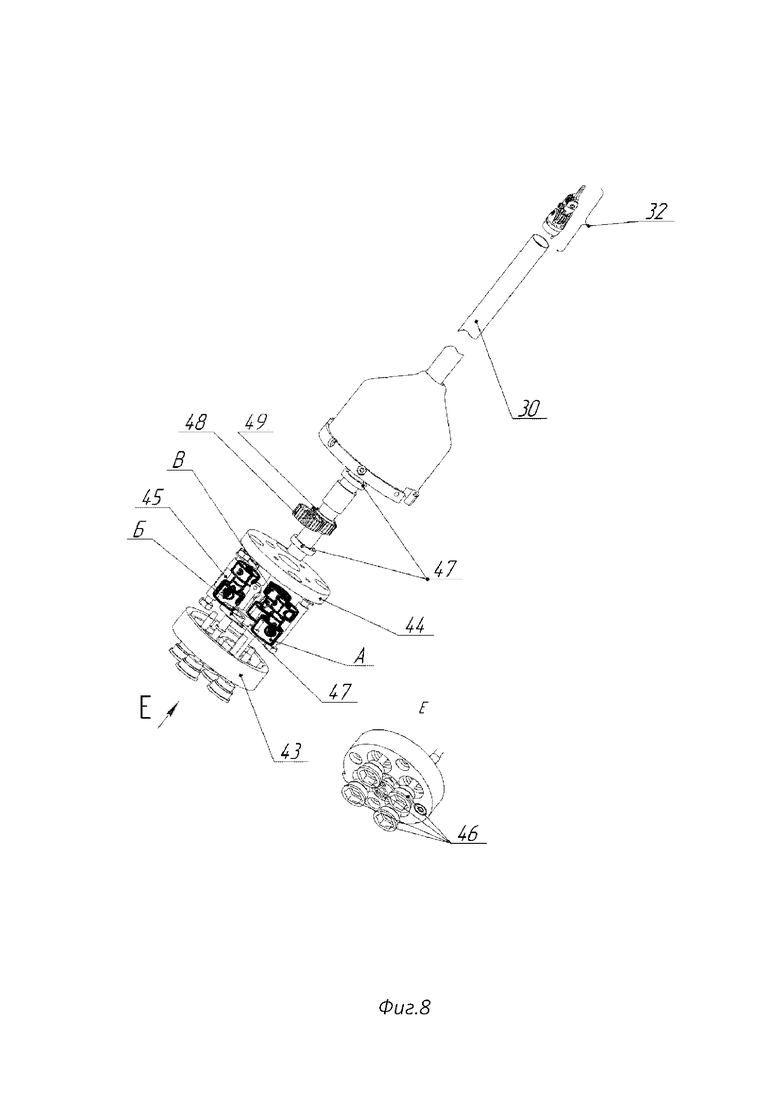
На фиг. 8 представлена конструкция сменного хирургического инструмента с пространственным разделением деталей для использования с предлагаемым приводом.
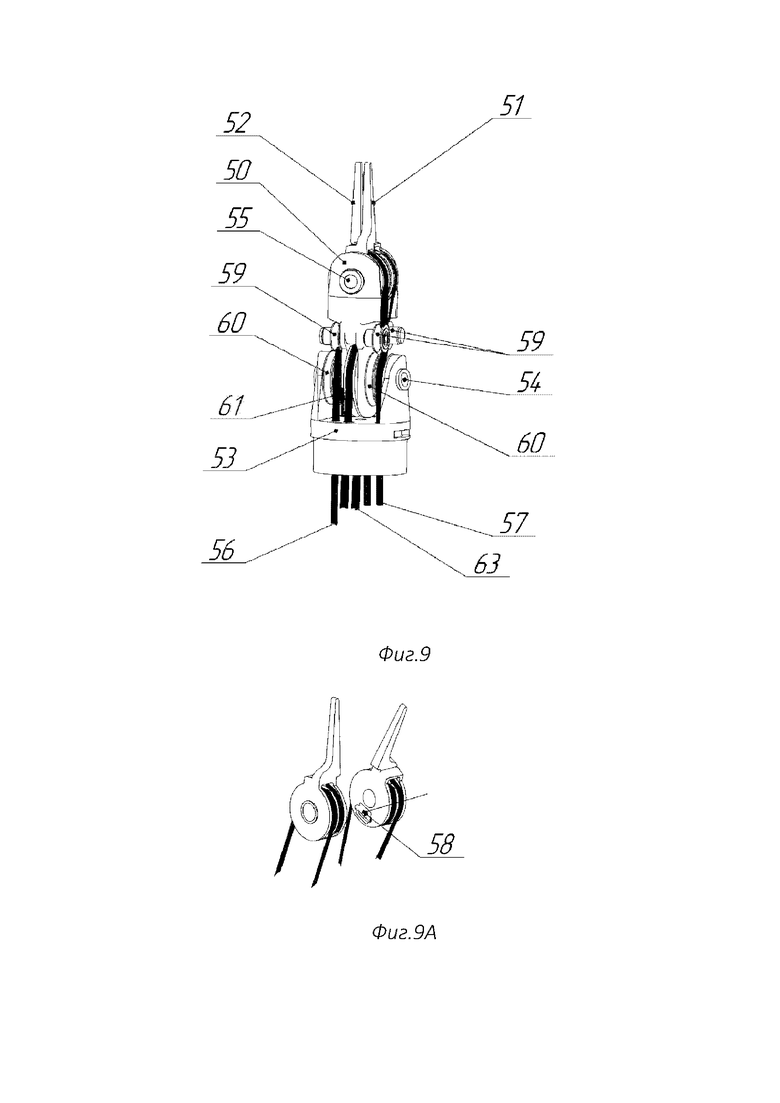
На фиг. 9 представлена шарнирная секция концевого эффектора с хирургическим инструментом.
На фиг. 9А представлена схема крепления тросов к браншам.
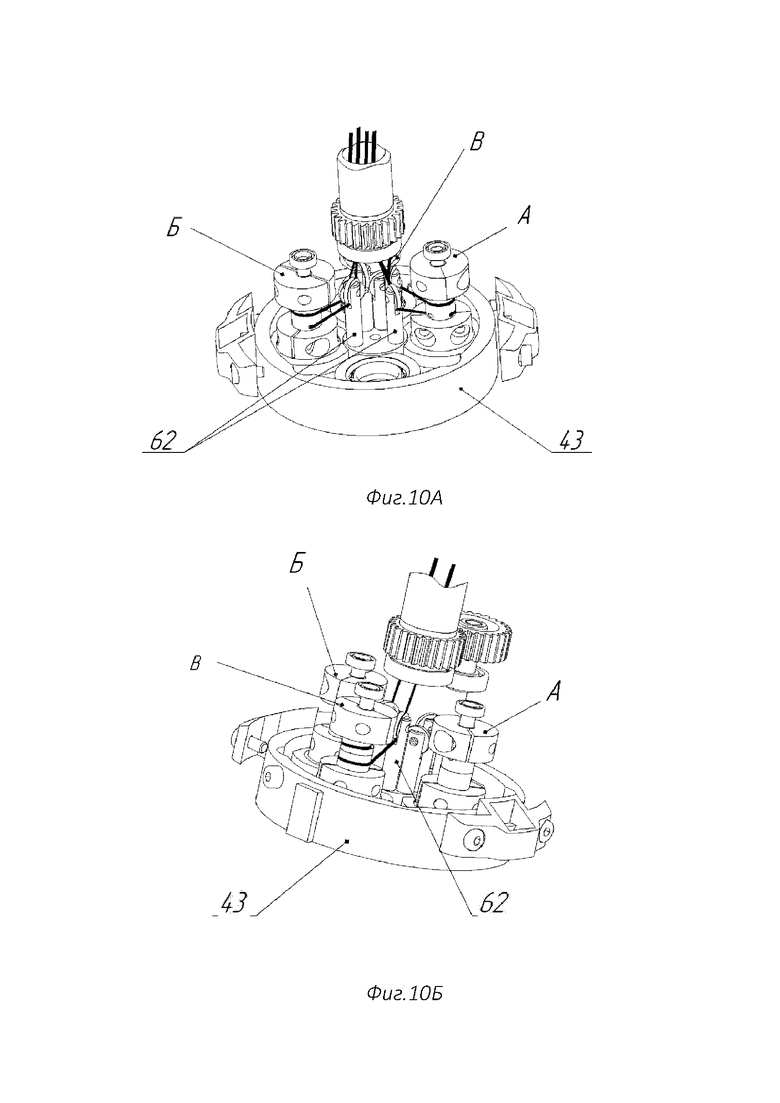
На фиг. 10А-В представлен механизм тросового привода инструмента.
На фиг. 10A представлен механизм тросового привода браншей.
На фиг. 10Б представлен механизм тросового привода поворотного корпуса концевого эффектора.
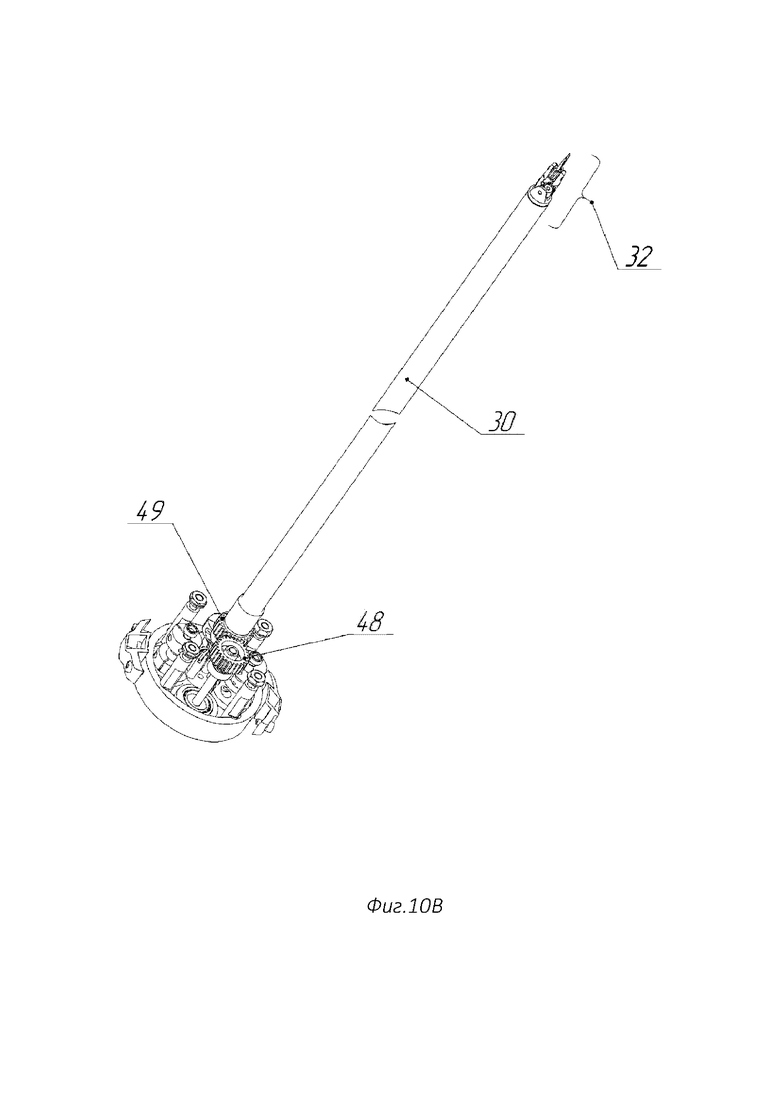
На фиг. 10В представлен механизм вращения концевого эффектора с инструментом.
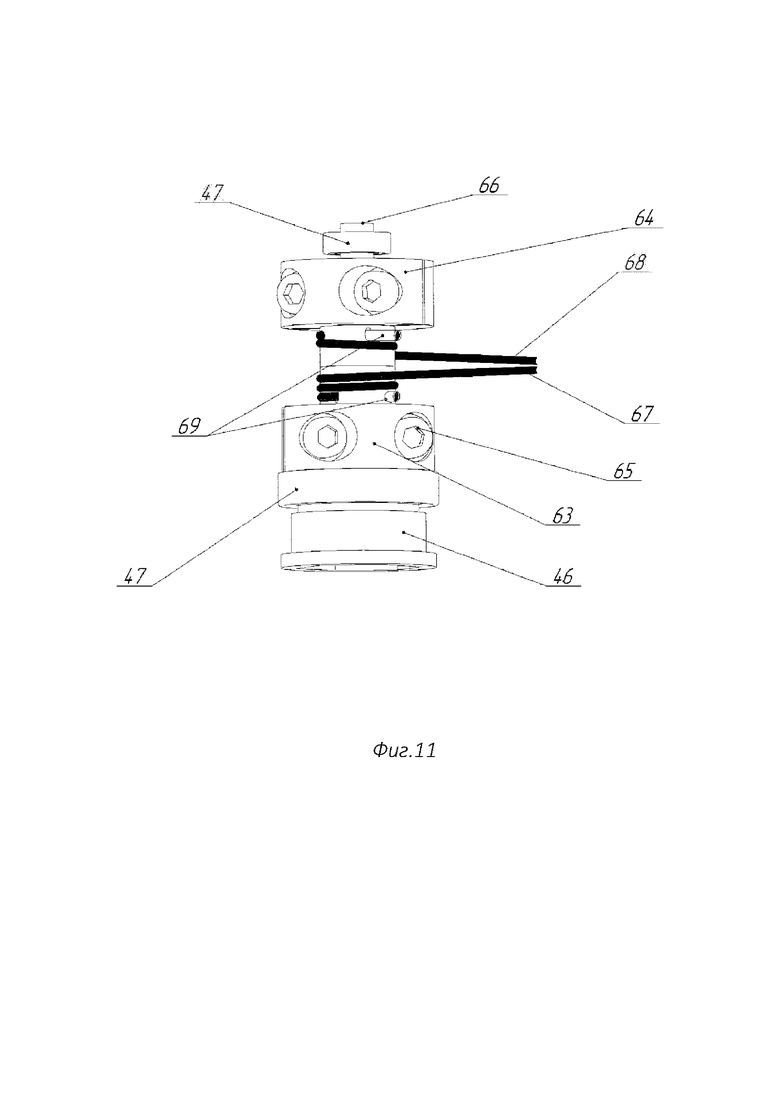
На фиг. 11 представлена схема крепления троса на роликовом барабане.
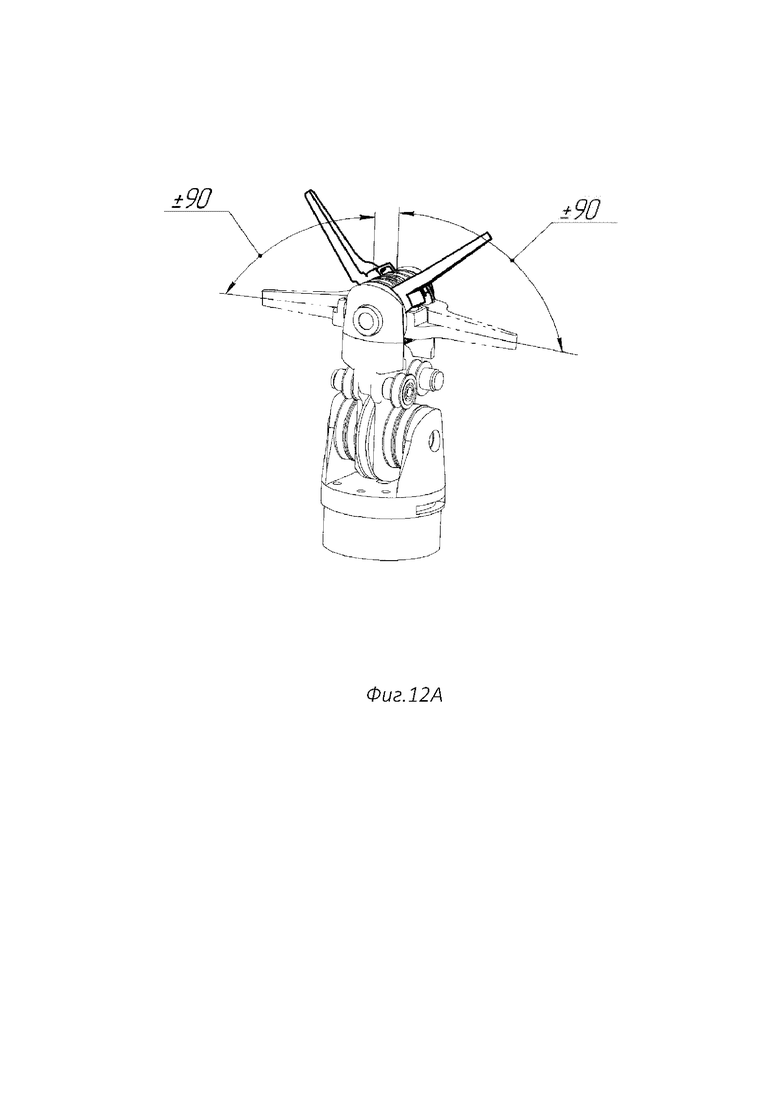
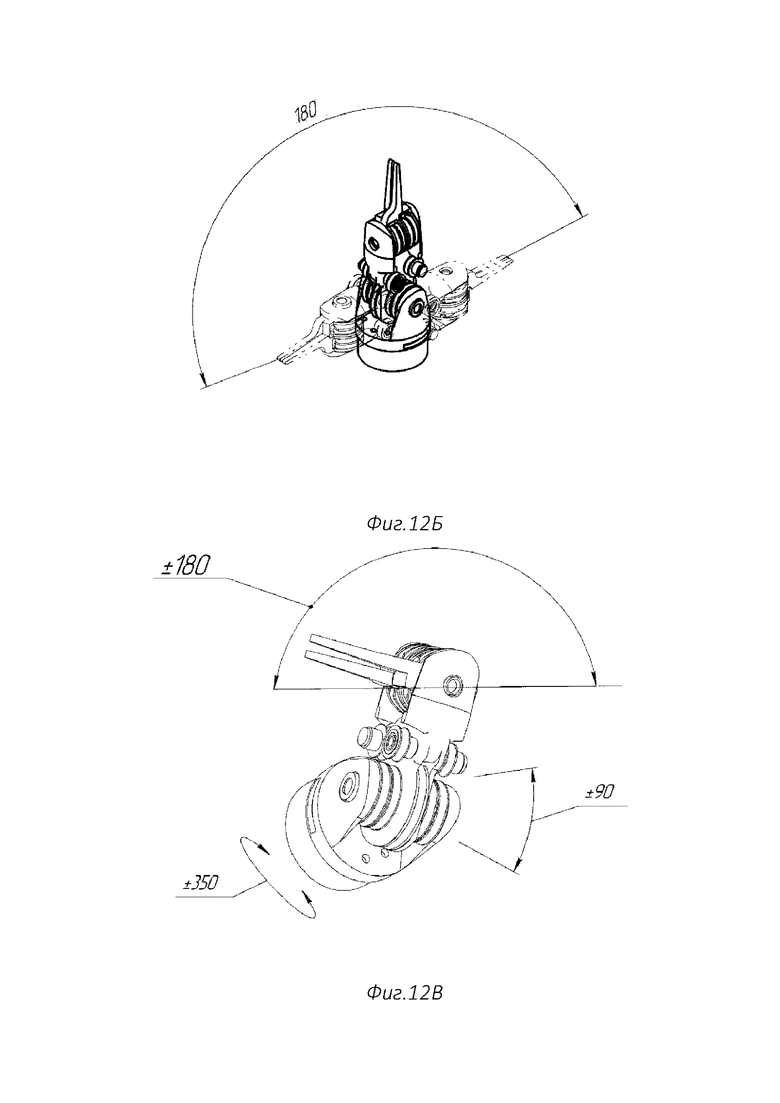
На фиг. 12А-12В изображена работа шарнирной секции концевого эффектора.
На фиг. 12А представлен вид, отображающий сведение или разведение рабочих частей хирургического инструмента, осуществляемого тросовым механизмом в крайних угловых значениях.
На фиг. 12Б представлен вид сбоку, отображающий работу шарнирной секции поворотного корпуса концевого эффектора, осуществляемого тросовым механизмом в крайних угловых значениях.
На фиг. 12В представлен вид отображающий возможные перемещения в пространстве браншей относительно поворотного корпуса, поворотного корпуса относительно корпус-вилка и вращения всей шарнирной секции относительно оси трубки инструмента.
Обозначения
Перспективный вид автономного мобильного модуля роботизированного хирургического комплекса состоит из следующих узлов (фиг. 1):
1 - Консоль хирурга;
2 - Подкатная тележка;
3 - Стойка манипулятора;
4 - Манипулятор;
5 - Хирургический стол;
6 - Ролики;
7 - Джойстик;
8 - Кресло хирурга;
9 - Видеосистема;
10 - Стойка управления.
Конструкция и основные узлы автономного мобильного модуля роботизированного хирургического инструмента (фиг. 2):
3 - Стойка манипулятора;
11 - Запястный шарнир;
12 - Ручная струбцина;
13 - Подвижная платформа;
14 - Неподвижная платформа;
15 - Привод хирургического инструмента;
16 - Хирургический инструмент;
17 - Узел сопряжения;
Общий вид гексапода (фиг. 3):
13 - Подвижная платформа;
14 - Неподвижная платформа;
18 - Актуатор (исполнительное звено);
19 - Шарнир.
Общий вид узла сопряжения (фиг. 4):
13 - Подвижная платформа;
15 - Привод хирургического инструмента;
16 - Хирургический инструмент;
17 - Узел сопряжения;
20 - Направляющая;
21 - Фиксирующая пластина;
22 - Крепежный хомут;
23 - Исполнительный механизм узла сопряжения;
Общий вид узла сопряжения в выдвинутом состоянии (фиг. 4А): ΔL - длина рабочего хода узла сопряжения.
Конструктивный вид исполнительного механизма узла сопряжения (фиг. 5):
15 - Привод;
24 - Серводвигатель;
25 - Вал шарико-винтовой передачи;
26 - Резьбовая втулка шарико-винтовой передачи.
Общий вид привода с инструментом (фиг. 6):
3 - Замок пружинный;
27 - Корпус привода;
28 - Крышка привода;
29 - Монтажная часть корпуса сменного хирургического инструмента;
30 - Удлиненный полый трубчатый корпус сменного хирургического инструмента;
31 - Защелка замка пружинного;
32 - Концевой эффектор.
Конструкция привода с пространственным разделением деталей (фиг. 7):
27 - Корпус привода;
28 - Крышка привода;
31 - Защелка замка пружинного;
33 - Монтажная платформа;
34 - Монтажная стыковочная платформа;
35 - Дистанционная стойка;
36 - Двигатель;
37 - Соединительная муфта;
38 - Подшипник качения;
39 - Ведущие полумуфты привода;
40 - Установочный фланец полумуфты;
41 - Пружина сжатия.
Конструкция сменного инструмента с пространственным разделением деталей для использования с предлагаемым приводом (фиг. 8):
30 - Удлиненный полый трубчатый корпус хирургического инструмента;
32 - Концевой эффектор;
43 - Монтажная стыковочная платформа;
44 - Верхняя монтажная платформа;
45 - Дистанционная стойка;
46 - Ведомые полумуфты хирургического инструмента
47 - Подшипник качения;
48 - Ведущая шестерня;
49 - Ведомая шестерня;
А - Тросовый барабан бранша 51;
Б - Тросовый барабан бранша 52;
В - Тросовый барабан поворота поворотного корпуса.
Шарнирная секция концевого эффектора с хирургическим инструментом (фиг. 9):
50 - Поворотный корпус концевого эффектора;
51, 52 - Бранш;
53 - Корпус-вилка концевого эффектора;
54 - Ось поворотного корпуса;
55 - Ось браншей;
56, 57 - Тросы браншей;
58 - Обжимная трубка;
59 - Направляющие ролики поворотного корпуса;
60 - Направляющие ролики корпуса-вилка;
61 - Направляющий канал;
63 - Трос поворотного корпуса.
Г - выемка для фиксации троса.
Механизм тросового привода браншей (фиг. 10A):
43 - Монтажная стыковочная платформа;
62 - Направляющие ролики привода браншей;
А - Тросовый барабан бранша 51;
Б - Тросовый барабан бранша 52;
В - Тросовый барабан поворота поворотного корпуса 50.
Механизм тросового привода поворотного корпуса концевого эффектора (фиг. 10Б):
43 - Монтажная стыковочная платформа;
62 - Направляющие ролики привода поворотного корпуса;
А - Тросовый барабан бранша 51;
Б - Тросовый барабан бранша 52;
В - Тросовый барабан поворота поворотного корпуса 50.
Механизм вращения концевого эффектора с инструментом (фиг. 10 В);
30 - Удлиненный полый трубчатый корпус;
32 - Концевой эффектор;
48 - Ведущая шестерня;
49 - Ведомая шестерня;
Схема крепления троса на роликовом барабане (фиг. 11):
46 - Ведомые полумуфты хирургического инструмента;
47 - Подшипник качения;
65 - Фиксирующий винт;
66 - Ось ведомой полумуфты;
67, 68 - Тросы;
69 - Обжимная трубка.
Подробное описание вариантов воплощения изобретения
Настоящее изобретение предлагает автономный мобильный модуль роботизированного хирургического инструмента, входящий в состав ассистирующего роботизированного хирургического комплекса.
Ассистирующий роботизированный хирургический комплекс, как правило, состоит из нескольких основных компонентов: консоли хирурга, консоли пациента и системы обзора. В показанном на фиг. 1 примере представлен перспективный вид ассистирующего роботизированного хирургического комплекса для выполнения минимальных инвазивных вмешательств, в частности, лапароскопических процедур в составе консоли хирурга 1 и робота-хирурга, называемого также роботом ассистентом или роботом-манипулятором, который состоит из подкатной тележки 2 с установленными (закрепленными) на ней на стойках 3 манипуляторами 4. Манипуляторы 4 предназначены для позиционирования и ориентации исполнительного блока, который удерживает и приводит в движение различные виды хирургических инструментов.
Тележка 2 имеет п-образную форму и подкатывается вручную ассистентом под стандартный хирургический стол 5, на котором располагается пациент, на определенную глубину. Тележка 2 фиксируется тормозной системой, встроенной в колеса 6 тележки.
Консоль хирурга 1 представляет собой устройство, включающее в себя видео систему для отображения операционного поля, два устройства 7 управления хирургическим инструментом (джойстик). Во время проведения операции на консоли хирурга 1 хирург сидит в кресле 8 перед видеосистемой 9, наблюдает за операционным полем и дистанционно управляет манипуляторами 4 и, соответственно, хирургическими инструментами с помощью джойстиков 7 по одному в каждой руке. Количество используемых манипуляторов 4 может быть не менее трех в зависимости от типа проводимой операции и числа применяемых во время операции хирургических инструментов. Причем один манипулятор 4 всегда должен удерживать хирургический инструмент с видеокамерой. Консоль хирурга 1 электрически связана с подкатной тележкой 2, располагающейся непосредственно возле пациента, и стойкой управления 10, в которой расположены блоки питания и блоки с программным обеспечением управления джойстиками 7, манипуляторами 4 и всех вспомогательных систем.
Сами манипуляции и ход операции с использованием ассистирующего роботизированного хирургического комплекса практически не отличаются от таковых при лапароскопических, за исключением большего удобства для хирурга, который работает сидя, в комфортных условиях, вне самой операционной или рядом на некотором удалении от операционного стола.
Настоящее изобретение направлено на усовершенствование конструкции манипулятора 4 на стойке 3. Так, настоящее изобретение предлагает автономный мобильный модуль роботизированного хирургического инструмента, включающий в себя новую конструкцию манипулятора для манипулирования сменным хирургическим инструментом в соответствии с первым аспектом предлагаемого изобретения, и сам хирургический инструмент в соответствии со вторым аспектом предлагаемого изобретения. В соответствии с третьим аспектом предлагаемого изобретения хирургический инструмент имеет усовершенствованную конструкцию концевого эффектора.
На фиг. 2 показан общий внешний вид предлагаемого настоящим изобретением автономного мобильного модуля роботизированного хирургического инструмента. Модуль включает в себя манипулятор на основе механизма параллельной кинематики, жестко закрепленный на стойке 3 через запястный шарнир 11, который позволяет вручную ориентировать (перемещать) манипулятор для того чтобы завести инструмент через троакар в брюшную полость пациента в операционное поле. Далее происходит фиксация положения манипулятора с помощью ручной струбцины 12 на запястном шарнире 11. Наблюдение за перемещением инструмента внутри брюшной полости производится с помощью видеосистемы 9 на консоли хирурга 1.
Механизм параллельной кинематики выполнен в виде гексапода. Указанный механизм соединяет подвижную платформу 13 и неподвижную платформу 14 и выполнен с возможностью управляемого маневрирования подвижной платформы 13 относительно неподвижной платформы 14. Внутренняя часть гексапода определяется как объемное усеченное виртуальное коническое тело, образованное шестью исполнительными механизмами, соединенных шарнирно одной стороной с неподвижной платформой 14, а другой - с подвижной платформой 13, которые являются соответственно основанием и вершиной конуса.
Во внутренней части гексапода расположен привод 15, к которому присоединяется сменный хирургический инструмент 16. Сочленение привода 15 и сменного хирургического инструмента 16 выполнено таким образом, что позволяет использование доступных стандартных инструментов, которые были разработаны для обычных, неавтоматизированных процедур, или узкоспециализированных хирургических инструментов, в том числе разрабатываемого согласно одному из аспектов предлагаемого изобретения.
Привод 15 предназначен для приведения хирургического инструмента 16 в движение, в том числе, обеспечивает вращение хирургического инструмента 16 вокруг собственной оси. При этом сам привод 15 вместе с хирургическим инструментом 16 имеет возможность линейно перемещаться в возвратно-поступательном направлении относительно гексапода через подвижную платформу 13 и неподвижную платформу 14 гексапода. Такое перемещение привода 15 совместно с хирургическим инструментом 16 внутри гексапода реализуется с помощью узла сопряжения 17. Узел сопряжения 17 расположен внутри гексапода и закреплен на его подвижной платформе 13.
В следующих абзацах будет дано более подробное описание конструкции манипулятора со ссылкой на фигуры 3-5.
Фиг. 3 показывает некоторые признаки гексапода. Гексапод обеспечивает отклонение подвижной платформы 13 относительно неподвижной платформы 14 с помощью шести независимых исполнительных звеньев 18, каждое из которых с помощью соответствующих верхних и нижних шарниров 19 соединено одним концом с подвижной платформой 13, а другим концом - с неподвижной платформой 14.
В качестве верхних шарниров и нижних шарниров могут быть использованы разные типы шарниров. В предпочтительном варианте осуществления в качестве шарниров используются одинаковые типы шарниров со сходными угловыми характеристиками. В качестве шарниров 19 могут быть использованы разные типы шарниров, например, шаровые опоры. В предпочтительном варианте осуществления изобретения в гексаподе применяются карданные шарниры для обеспечения большей жесткости конструкции.
Исполнительное звено 18 в различных вариантах осуществления изобретения может быть выполнено в виде актуатора различной конструкции, выбранной из: линейный актуатор, сервомашинка, соленоид, гидравлический привод, пневматический привод, пневматический мускул, актуатор на основе электроактивных полимеров, актуатор на основе металлов с эффектом памяти. В предпочтительном варианте осуществления согласно предлагаемому изобретению исходя из целей и задач разработки исполнительное звено 18 выполнено в виде линейного актуатора, состоящего из серводвигателя постоянного тока или шагового двигателя с шарико-винтовой передачей.
Управление каждым из исполнительных звеньев 18 осуществляется независимо. Такая конфигурация манипулятора позволяет проводить позиционирование подвижной платформы 13 по трем линейным координатам (X,Y,Z), а также осуществлять вращение подвижной платформы вокруг соответствующих осей  . Исходя из кинематической схемы гексаподов происходит вращение каждого актуатора вокруг соответствующих осей и, соответственно подвижной платформы, центральная точка которой описывает полусферическое поле.
. Исходя из кинематической схемы гексаподов происходит вращение каждого актуатора вокруг соответствующих осей и, соответственно подвижной платформы, центральная точка которой описывает полусферическое поле.
Диаметр неподвижной платформы 14 выбран из обеспечения условий свободного размещения и перемещения узла сопряжения 17 совместно с подвижной платформой 13 относительно неподвижной платформы 14 при крайних отклонениях подвижной платформы 13, допускаемых конструкцией верхних и/или нижних шарниров 19. Поверхности подвижной 13 и неподвижной 14 платформ, обращенных друг к другу, на которых установлены шарниры 19, выполнены с уклоном на внешнюю и внутреннюю стороны (часть гексапода) соответственно, под углом, составляющим 18°. Это значение угла получено при оптимизации перемещений узла сопряжения и позволило расширить угловой диапазон работы карданных шарниров. Подобные гексаподы в зависимости от задачи имеют углы отклонений подвижной платформы до значений 10°. В заявляемом изобретении отклонение подвижной платформы, узла сопряжения с приводом и хирургическим инструментом на 18° относительно неподвижной платформы гексапода было получено для создания возможности работы рабочей части хирургического инструмента (концевого эффектора) в операционном поле с условным диаметром операционного поля не менее 200 мм.
На фиг. 4 представлен общий вид узла сопряжения 17 привода 15 со сменным хирургическим инструментом 16 с подвижной платформой 13 гексапода. Узел сопряжения выполнен в виде механизма сопряжения привода 15 с подвижной платформой 13 гексапода и исполнительного механизма 23, который обеспечивает линейное перемещение привода 15 в возвратно-поступательном направлении.
Механизм сопряжения привода 15 с подвижной платформой 13 включает по меньшей мере две направляющие 20, жестко закрепленные на подвижной платформе 13 гексапода и установленные перпендикулярно ей, по меньшей мере один крепежный хомут 22, который размещен на направляющих 20.
По меньшей мере две направляющие 20 узла сопряжения 17 жестко закреплены во внутренней части гексапода на подвижной платформе 13. Каждая из направляющих 20 узла сопряжения 17 закреплена одним концом на подвижной платформе 13 гексапода таким образом, что направляющие 20 устанавливаются перпендикулярно к указанной платформе 13. Другой конец каждой из направляющих 20 закреплен на фиксирующей пластине 21. На направляющих 20 размещен по меньшей мере один крепежный хомут 22, в котором закреплен привод 15. Фиксирующая пластина 21 выполняет функции ограничителя хода привода 15, фиксации направляющих 20.
Исполнительный механизм 23 узла сопряжения 17 обеспечивает линейное перемещение привода 15 со сменным хирургическим инструментом 16 по направляющим 20 узла сопряжения 17 в возвратно-поступательном направлении. Исполнительный механизм 23 согласно показанному на фиг. 4 варианту осуществления изобретения представлен в парковочном положении.
Исполнительный механизм 23 с одной стороны соосно жестко закреплен винтами на крышке корпуса привода 15, а с другой стороны исполнительный механизм 23 жестко закрепленна фиксирующей пластине 21.
В качестве исполнительного механизма может быть применен серводвигатель постоянного тока, шаговый двигатель с шарико-винтовой передачей, реечный механизм, тросовый механизм, а также гидравлический привод, пневмопривод, соленоидный привод.
На фиг. 4 представлен вариант осуществления изобретения, в котором в качестве исполнительного механизма применен серводвигатель с шарико-винтовой передачей. В изображенном на фиг. 4 варианте осуществления изобретения исполнительный механизм 23 жестко закреплен на фиксирующей пластине 21 посредством резьбовой втулки шарико-винтового механизма, ввернутой в резьбовое отверстие в центре фиксирующей пластины 21. Таким образом, дополнительной функцией фиксирующей пластины 21 является место крепления резьбовой втулки шарико-винтового механизма.
На фиг. 4А показан узел сопряжения в выдвинутом положении, где ΔL - длина «рабочего хода» (выдвижение/втягивание), которая зависит от длины штока шарико-винтовой передачи применяемого исполнительного механизма 23 и соответствующих ему длин направляющих 20. В этом положении привод 15 со сменным хирургическим инструментом 16 проходит через подвижную платформу 13 гексапода таким образом, что хирургический инструмент занимает рабочую позицию, а привод смещается относительно парковочного положения (фиг. 4)
На фиг. 5 показан один из примеров выполнения исполнительного механизма 23, который состоит из серводвигателя 24, вала шарико-винтовой передачи 25 и резьбовой втулки шарико-винтовой передачи 26. Серводвигатель 24 передает крутящий момент шарико-винтовой передаче 25. При вращении вала шарико-винтовой передачи 25 происходит линейное перемещение привода 15 со сменным хирургическим инструментом 16 (по типу «винт-гайка»), осуществляемое через резьбовую втулку шарико-винтовой передачи 26, жестко закрепленную на фиксирующей пластине 21 узла сопряжения 17. Перемещение осуществляется со скоростью и направлением, задаваемым хирургом с помощью программного обеспечения автономного мобильного модуля роботизированного хирургического инструмента. Процессор с программным обеспечением устанавливается на компьютерной стойке 10, расположенной рядом с консолью хирурга 1. Через процессор с установленным в нем программным обеспечением хирург имеет возможность осуществлять управление манипулятором и концевым эффектором хирургического инструмента с помощью джойстика на консоли хирурга.
В предпочтительных вариантах осуществления изобретения в качестве двигателя исполнительного механизма может быть применен тот же двигатель с шарико-винтовой передачей, что и в исполнительных звеньях (актуаторах) гексапода, обеспечивающих такую же точность позиционирования. Это позволяет унифицировать узлы конструкции и возможность применения однотипных контроллеров и протоколов обмена, что приводит к упрощению программы управления манипулятора. При разработке изделий в целях унификации и удобства сопряжения внешних устройств (контроллеров, драйверов и так далее) целесообразно комплектовать изделие однотипным оборудованием.
Другой аспект заявляемого изобретения относится к конструкции сменного хирургического инструмента для использования его с приводом, который является постоянной частью манипулятора автономного мобильного модуля роботизированного хирургического инструмента.
На фиг. 6 представлен общий вид привода со сменным хирургическим инструментом. Предпочтительно, когда привод хирургического инструмента содержит корпус 27 цилиндрической формы с крышкой 28 на одном конце и с поверхностью доступа, в которой расположен механизм быстросъемной установки или снятия 31 сменного хирургического инструмента, на другом. Данный механизм крепит корпус 27 привода к корпусу сменного хирургического инструмента в сборе и обеспечивает быструю установку и/или замену хирургического инструмента. В качестве поверхности доступа механизма быстросъемной установки или снятия сменного хирургического инструмента используется монтажная стыковочная платформа корпуса привода.
Предпочтительно, когда корпус сменного хирургического инструмента выполнен в виде монтажной части 29 и удлиненного полого трубчатого корпуса 30. Удлиненный полый трубчатый корпус 30 выполнен с возможностью функционального взаимодействия с приводом. Монтажная часть 29 корпуса сменного хирургического инструмента имеет цилиндрическую воронкообразную форму с поверхностью доступа, в которой расположен механизм быстросъемной установки или снятия сменного хирургического инструмента 31. Диаметр присоединяемой монтажной части 29 корпуса сменного хирургического инструмента равен диаметру корпуса 27 привода. В качестве поверхности доступа механизма быстросъемной установки или снятия сменного хирургического инструмента используется монтажная стыковочная платформа монтажной части корпуса хирургического инструмента.
В предпочтительных вариантах осуществления в качестве механизма быстросъемной установки или снятия сменного хирургического инструмента может быть выбран один из: пружинный замок с защелками, байонетное соединение, резьбовая накидная гайка, магнитный замок. На фиг. 6 изображен вариант осуществления механизма быстросъемной установки или снятия хирургического инструмента согласно настоящему изобретению в виде пружинного замка с защелками.
Диаметр удлиненного полого трубчатого корпуса 30 хирургического инструмента зависит от типа хирургической операции. Например, в нейрохирургии применяются инструменты с диаметром 3 мм, в детской хирургии - диаметром 5 мм, в урологии - 8,5 мм. Длина указанного трубчатого корпуса 30 составляет от 495 мм до 555 мм в зависимости от типа и назначения хирургического инструмента. На дистальном конце удлиненного полого трубчатого корпуса 30 закреплен хирургический концевой эффектор 32.
Конструкция привода станет понятна из фиг. 7.
Корпус 27 одет на соответствующее посадочное место монтажной стыковочной платформы 34 привода и закрыт, с другой стороны, крышкой привода 28. Внутри корпуса привода 27 находится монтажная платформа 33. Платформы 33 и 34 выполнены в виде фланцев с отверстиями для крепления двигателей, узлов приводных муфт, подшипников качения и соединены между собой по меньшей мере четырьмя дистанционными стойками 35. На монтажной платформе 33 жестко закреплены по меньшей мере четыре двигателя 36 по кольцевой схеме. При разработке конструкции выбираются двигатели со следующими характеристиками: точность углового поворота вала двигателя; необходимая величина крутящего момента и скорости вращения вала с возможностью их регулирования; напряжение питания и ток применяемых двигателей; способ крепления; габариты и масса.
Двигатель может представлять собой серводвигатель. В других конфигурациях двигатель может включать в себя приводной щеточный двигатель постоянного тока, бесщеточный двигатель, синхронный двигатель, малогабаритный шаговый двигатель или любой другой подходящий электрический двигатель. Двигатель может получать электропитание от источника питания, который в одной форме может содержать блок питания, хранящийся с возможностью извлечения в стандартной 19-ти дюймовой стойке 10, находящейся рядом с консолью хирурга 1.
Блок питания может функционально вмещать в себя несколько батарей (не показаны). Каждая батарея может представлять собой, например, литий-ионную или другую подходящую батарею, кроме этого, блок питания может быть сменным и/или перезаряжаемым.
Двигатели 36 привода хирургического инструмента активируются хирургом с консоли хирурга с помощью двух джойстиков под каждую руку, сигналы с которых интерпретируются с помощью программного обеспечения. Каждый из двигателей 36 управляется независимо друг от друга. Система управления двигателями обеспечивает их раздельную или одновременную работу в зависимости от команды оперирующего хирурга.
Крутящий момент от двигателей 36 через соединительные муфты 37, вращающиеся в подшипниках качения 38, передается на ведущие полумуфты 39, установленные с возможностью свободного вращения на монтажной стыковочной платформе 34 в установочном фланце полумуфты 40 и подпружиненные пружинами сжатия 41.
Тип используемых муфт выбирается в зависимости от решаемых задач, а именно: жесткие или глухие муфты - фланцевые, втулочные, продольно-свертные; компенсирующие муфты - шарнирные, упруго-демпфирующие, втулочно пальцевые и другие. В случае, описанным в настоящем изобретении, применяются самоуправляемые или автоматические муфты, однооборотные, которые срабатывают, попадая в определенное положение, через один или несколько оборотов вала. В предпочтительном варианте осуществления изобретения муфты выполнены в виде шестигранников, что ускоряет процесс зацепления в отличие от шлицевых и других муфт.
Согласно фиг. 7 ведущие полумуфты 39, выполненные в виде шестигранников S=8 mm, выступают над монтажной стыковочной платформой 34 на 2 мм. Пружины сжатия 41 выполняют роль демпфера и механизма зацепления ведущих полумуфт 39 с ведомыми полумуфтами сменного хирургического инструмента. Таким образом, ведущие полумуфты 39 привода передают крутящий момент на ответные ведомые полумуфты хирургического инструмента.
Внутренняя конструкция привода установлена в корпус 27. Сборка конструкции обеспечивается стягивающей осью 42, имеющей резьбовое окончание с обеих сторон, проходящей по центральной оси привода между двигателями 36 и через центральное отверстие в крышке 28. Стягивающая ось 42 одной стороной ввернута в монтажную стыковочную платформу 34, а другой стороной проходит через сквозное отверстие в крышке 28 привода. На внешней поверхности крышки 28 стягивающая ось 42 фиксируется стандартной резьбовой гайкой, обеспечивая простое, легко разборное и жесткое соединение элементов привода. На крышке корпуса привода 15 соосно жестко закреплен винтами исполнительный механизм 23.
Фиксация соединения или разъединения корпуса привода со сменным инструментом реализуется с помощью замка пружинного 31, расположенного внутри монтажной стыковочной платформы 34.
Приведение в движение хирургического инструмента станет понятным из фиг. 8.
Удлиненный полый трубчатый корпус выполнен с возможностью функционального взаимодействия с приводом и возможностью вращения вокруг собственной оси в двух соосно установленных подшипниках качения 47, являющихся его опорами, один из которых, запрессован в верхнюю часть монтажного корпуса 29, второй в верхнюю монтажную платформу 44.
Монтажная часть 29 корпуса хирургического инструмента одета с натягом на соответствующее посадочное место монтажной стыковочной платформы 43 хирургического инструмента.
Внутри монтажной части корпуса сменного инструмента находится монтажная стыковочная платформа 43 и верхняя монтажная платформа 44 соединенные между собой, по меньшей мере четырьмя дистанционными стойками 45. Платформы 43 и 44 выполнены в виде фланцев с отверстиями и являющиеся опорными поверхностями для крепления тросового механизма, механизма поворота концевого эффектора и ведомых полумуфт.
Ведомые полумуфты 46 хирургического инструмента, выполненные в изображенном на фиг. 8 варианте осуществления изобретения с шестигранной выборкой S=8 мм имеют те же координаты размещения, что и ведущие полумуфты 39 (фиг. 7) привода. Оси ведомых полумуфт 46 установлены в подшипники качения 47 монтажной стыковочной платформы 43 и верхней монтажной платформы 44 в соответствующих расточках, выполненных в этих платформах. Ведомые полумуфты 46 хирургического инструмента входят в зацепление с соответствующими ведущими полумуфтами 39 (фиг. 7) привода.
Тросовый механизм содержит три поворотных элемента, выполненных с возможностью приема поворотного движения от привода 15, и тросы, закрепленные на поворотных элементах, и проходящие через удлиненный полый трубчатый корпус для соединения с элементами концевого эффектора. Концевой эффектор представляет собой шарнирную секцию, в частности, двухзвенный шарнирный механизм с поворотным корпусом и корпусом-вилка. На оси поворотного корпуса закреплены первая бранша и вторая бранша. На оси корпуса-вилка закреплен поворотный корпус.
В качестве поворотных элементов использованы роликовые барабаны А, Б и В, которые одновременно являются блоками натяжения тросов и закреплены на осях ведомых полумуфт 46. Роликовые барабаны А, Б и В приводятся в действие тремя двигателями 36 привода (фиг. 7). Ответные ведомые полумуфты 46 хирургического инструмента передают крутящий момент от соответствующих двигателей через ведущие полумуфты 39 привода и обеспечивают вращение роликовых барабанов А, Б и В. Две пары тросов жестко закреплены на роликовых барабанах, тросы проходят через полый трубчатый корпус 30 и соединяются с шарнирными элементами концевого эффектора 32.
Одна пара тросов, которая жестко закреплена на роликовых барабанах А и Б передает тяговое усилие каждому из браншей концевого эффектора для углового перемещения относительно продольной оси поворотного корпуса концевого эффектора 32 (сведение или разведение рабочих частей бранш концевого эффектора). Вторая пара тросов, которая жестко закреплена на роликовом барабане В, передает тяговое усилие поворотному корпусу концевого эффектора 32 для его углового перемещения (отклонения) относительно оси удлиненного полого трубчатого корпуса 30 хирургического инструмента. Перемещение браншей хирургического инструмента и отклонение поворотного корпуса концевого эффектора 32 осуществляется автономно во взаимно-перпендикулярных плоскостях.
В разных вариантах осуществления изобретения тросы, используемых в тросовом механизме, могут быть выполнены из: металлических нитей, кевларовых нитей, полиэтиленовых нитей или из любого другого материала, удовлетворяющего медико-техническим требованиям.
Механизм поворота концевого эффектора содержит механизм зубчатой передачи, состоящий из ведущего колеса 48, передающего крутящий момент ведомому колесу 49, для вращения удлиненного полого трубчатого корпуса 30 вокруг собственной оси и соответственно корпуса-вилка концевого эффектора 32, который жестко соединен с удлиненным полым трубчатым корпусом 30.
Таким образом, поворотный корпус концевого эффектора 32 выполнен с возможностью углового перемещения относительно оси удлиненного полого трубчатого корпуса 30. Корпус - вилка концевого эффектора 32 выполнен с возможностью вращения (поворота) вокруг оси удлиненного полого трубчатого корпуса 30.
Другой аспект заявляемого изобретения относится к совершенствованной конструкции кинематической схемы концевого эффектора сменного хирургического инструмента для использования его с приводом, который является постоянной частью манипулятора автономного мобильного модуля роботизированного хирургического инструмента.
На фиг. 9 представлен общий вид шарнирной секции концевого эффектора с хирургическим инструментом. Концевой эффектор представляет из себя шарнирную секцию, состоящую из корпуса-вилки 53, поворотного корпуса 50 и двух бранш 51, 52.
Корпус-вилка 53 концевого эффектора 32 жестко соединен лазерной сваркой с удлиненным полым трубчатым корпусом 30 хирургического инструмента. Поворотный корпус 50 выполнен совместно с направляющим каналом 61. Направляющий канал 61 поворотного корпуса 50, направляющие ролики 60 корпуса-вилка 53, расположенные с обоих сторон от направляющего канала 61, соединены осью 54.
Направляющие ролики 59, по паре с каждой стороны от поворотного корпуса 50, и направляющие ролики 60 обеспечивают направление и точность схода тросов 56, 57 браншей 51,52 через соответствующие отверстия в корпусе-вилка 53 и далее внутри удлиненного трубчатого корпуса 30 к соответствующим тросовым барабанам А, Б, В (фиг. 8).
Каждая из бранш 51, 52 хирургического инструмента имеет нижнюю роликовую часть. Бранши 51, 52 и поворотный корпус 50 соединены осью 55 бранш, которая проходит через нижнюю роликовую часть бранш. В частном случае, изображенном на фиг. 9, на фиг. 9А, представлены бранши микроиглодержателя. При этом ось 55 браншей 51, 52 хирургического инструмента и ось 54, соединяющая поворотный корпус 50 и корпус-вилку 53, взаимно перпендикулярны друг другу, что позволяет поворотному корпусу 50 и браншам 51, 52 вращаться соответственно, во взаимно перпендикулярных плоскостях.
Схема крепления тросов к браншам показана на фиг. 9А.
В нижней роликовой часть каждой из браншей 51 и 52 на внутренних частях, обращенных друг к другу, имеются выемки Г. Тяговое усилие к каждому из двух браншей 51 и 52 передается тросами 56 и 57 соответственно, жестко закрепленных в выемках Г с помощью обжимных трубок 58 и, обеспечивающих угловое перемещение браншей 51, 52 относительно продольной оси поворотного корпуса 50 концевого эффектора в диапазоне ±90°. Каждая из ветвей тросов 57, 58 укладывается встречно в свою канавку нижней роликовой части бранши на соответствующий бранш, огибая его по обе стороны нижней роликовой части. Далее обе ветви тросов проходят по направляющим роликам 59 и 60 (фиг. 9) и через соответствующие отверстия в корпусе-вилка 53 концевого эффектора подводятся через полый удлиненный трубчатый корпус 30 и через направляющие ролики 62, установленные на монтажной стыковочной платформе 43 (фиг. 10A) (верхняя монтажная платформа 44 условно не показана) к роликовым барабанам А и Б.
Тяговое усилие к поворотному корпусу 50 для его отклонения относительно оси удлиненного полого трубчатого корпуса сменного хирургического инструмента 30 передает вторая пара тросов 63, которая обвивает направляющий канал 61 поворотного корпуса 50. Тросы через соответствующие отверстия в корпусе-вилка 53 концевого эффектора подводятся через полый удлиненный трубчатый корпус 30 и через направляющие ролики 62, установленные на монтажной стыковочной платформе 43 (фиг. 10Б), (верхняя монтажная платформа 44 условно не показана) к роликовому барабану В.
С другой стороны верхней монтажной платформы 44 хирургического инструмента 32 расположен механизм поворота концевого эффектора, который содержит механизм зубчатой передачи 51, 52 для поворота корпуса-вилки 53 концевого эффектора 32. В показанном на фиг. 10В (верхняя монтажная платформа 44 условно не показана) варианте осуществления изобретения механизм поворота концевого эффектора выполнен в виде прямозубого шестеренчатого механизма, который работает от крутящего момента, передаваемым четвертым двигателем 36 привода 27 через полумуфты 39 и 46 на ведущую шестерню 51 и ведомую шестерню 52, которая жестко связана с удлиненным полым трубчатым корпусом 30 хирургического инструмента.
На фиг. 11 изображена схема крепления тросов на роликовом барабане (тросы и барабаны показаны как пример, безотносительно к выполняемой функции).
Каждый из роликовых барабанов состоит из двух разрезных (по образующей) втулок 63, 64 с роликовой частью, стянутых между собой фиксирующими винтами 65 и одетых на ось 66 ведомой полумуфты 46 навстречу друг другу роликовыми частями.
Два троса 67.68 жестко закреплены в тангенциально расположенных отверстиях на внутренней стороне роликовой части барабана с помощью обжимных трубок 69, залитых литьевым полиамидом. Каждая ветвь троса наматывается на роликовый барабан тросового механизма следующим образом: одна ветвь наматывается на разрезную подвижную втулку верхнего роликового барабана 64, вторая ветвь - на разрезную подвижную втулку нижнего роликового барабана 65 по одному обороту навстречу друг другу и жестко закрепляются с помощью обжимных трубок 69 на концах тросов. Натяжение тросов, для исключения провисания и холостых пробегов, производится путем вращения соответствующих барабанов во встречном направлении с последующей фиксацией фиксирующими винтами 65.
На фиг. 12А-12В изображена работа шарнирной секции концевого эффектора. Управление каждым браншем может быть осуществлено с помощью двух двигателей подсоединяемого к хирургическому инструменту привода как автономно, в пределах угловых перемещений φ=±90°, так и совместно обоими браншами в том же угловом диапазоне (фиг. 12А). Отклонение поворотного корпуса концевого эффектора осуществляется с помощью третьего двигателя, подсоединяемого к хирургическому инструменту привода до крайних симметричных угловых значений относительно оси инструмента в пределах φ=±90° (фиг. 12Б). На фиг. 12 В представлен вид отображающий возможные перемещения в пространстве браншей относительно поворотного корпуса, поворотного корпуса относительно корпус-вилка и вращения всей шарнирной секции относительно оси трубки инструмента.
Таким образом, расположенный внутри корпуса хирургического инструмента тросовый механизм, соединяющий роликовые барабаны с шарнирными механизмами концевого эффектора через тросы, которые проходят через полый удлиненный трубчатый корпус хирургического инструмента, позволяет управлять с помощью 2-х двигателей автономно каждым браншем инструмента, обеспечивая сведение/разведение рабочих поверхностей на φ=±180°, и управлять с помощью третьего двигателя поворотным корпусом концевого эффектора, обеспечивая его отклонение на φ=±90° относительно оси инструмента. Перемещение браншей инструмента и отклонение корпуса концевого эффектора осуществляется во взаимно-перпендикулярных плоскостях.
Вращение инструмента вокруг оси на φ=±350° обеспечивает прямозубый шестеренчатый механизм, также встроенный в корпус инструмента и работающий от крутящего момента, передаваемого 4-м двигателем привода на ведомую шестерню жестко связанной с трубкой инструмента.
Более того, узел сопряжения 17 обеспечивает линейное возвратно-поступательное перемещение хирургического инструмента 16 при различных отклонениях подвижной платформы 13, при этом концевой эффектор хирургического инструмента одновременно с указанным линейным перемещением имеет возможность вращаться вокруг своей собственной оси, а бранши концевого эффектора могут независимо от этих движений перемещаться друг относительно друга.
Положительный эффект и преимущества предлагаемого автономного мобильного модуля роботизированного хирургического инструмента:
- использование гексапода как элемента роботизированного модуля, повышающего точность проведения хирургической процедуры;
- встроено устройство сопряжения инструмента с приводом и с механизмом возвратно-поступательного движения инструмента по направляющим;
- быстросъемный инструмент;
- повышение манипуляционных возможностей;
- упрощение конструкции роботизированной руки (уменьшение числа степеней свободы) за счет применения гексапода в качестве манипулятора.
- в отличие от широко известного аналога, роботохирургического комплекса «da Vinci», предлагаемое устройство имеет существенно меньшие размеры и вес.
Хотя настоящая патентная заявка относится к определенному в прилагаемой ниже в формуле изобретения изобретению, специалист без труда поймет, что настоящая заявка на патент содержит основание для формулировки других изобретений, которые могут, например, быть заявлены как объект уточненной формулы изобретения настоящей заявки или как объект формулы изобретения в выделенной и/или продолжающей заявке. Такой объект может быть охарактеризован любым признаком или комбинацией признаков, описанных в настоящем документе.
Группа изобретений относится к медицине. Манипулятор хирургического инструмента в составе автономного мобильного модуля роботизированного хирургического инструмента включает неподвижную платформу, подвижную платформу, механизм параллельной кинематики, привод и узел сопряжения привода с гексаподом. Механизм параллельной кинематики выполнен в виде гексапода, соединяющего неподвижную платформу и подвижную платформу и выполненного с возможностью управляемого маневрирования подвижной платформой. Привод выполнен с возможностью присоединения к нему сменного хирургического инструмента и приведения указанного хирургического инструмента в движение. Узел сопряжения упомянутого привода с гексаподом расположен внутри гексапода и закреплен на подвижной платформе. Узел сопряжения выполнен с возможностью линейного перемещения привода со сменным хирургическим инструментом в возвратно-поступательном направлении через подвижную платформу. Сменный хирургический рабочий инструмент для использования с приводом манипулятора включает корпус и хирургический концевой эффектор. Корпус выполнен в виде монтажной части и удлиненного полого трубчатого корпуса. Монтажная часть имеет поверхность доступа, в которой расположен механизм быстросъемной установки или снятия сменного хирургического инструмента для соединения с корпусом привода. Удлиненный полый трубчатый корпус выполнен с возможностью функционального взаимодействия с приводом. Хирургический концевой эффектор выполнен в виде шарнирной секции с поворотным корпусом и корпусом-вилкой. Корпус-вилка жестко соединен с дистальным концом удлиненного полого трубчатого корпуса. На оси корпуса-вилки установлен поворотный корпус. На оси поворотного корпуса установлены первая бранша и вторая бранша. Внутри монтажной части находятся тросовый механизм, который содержит три поворотных элемента, выполненных с возможностью приема поворотного движения от привода, и тросы, закрепленные на поворотных элементах и проходящие через удлиненный полый трубчатый корпус для соединения с элементами шарнирной секции концевого эффектора. Тросы двух поворотных элементов передают тяговое усилие к каждой бранше для углового перемещения соответствующих первой бранши и второй бранши относительно продольной оси поворотного корпуса концевого эффектора. Трос третьего поворотного элемента передает тяговое усилие поворотному корпусу концевого эффектора для его углового перемещения относительно оси удлиненного полого трубчатого корпуса хирургического инструмента. Механизм поворота концевого эффектора содержит механизм зубчатой передачи для поворота корпуса-вилки концевого эффектора вокруг оси удлиненного полого трубчатого корпуса хирургического инструмента, выполненный с возможностью приема поворотного движения от привода. Корпус-вилка концевого эффектора хирургического рабочего инструмента выполнен с двумя направляющими роликами. Поворотный корпус выполнен совместно с направляющим каналом. Направляющий канал поворотного корпуса и направляющие ролики корпуса-вилки, расположенные по обе стороны от направляющего канала, установлены на оси корпуса-вилки. Каждая из бранш имеет нижнюю роликовую часть и установлена на оси поворотного корпуса, перпендикулярной оси корпуса-вилки. Соответствующий трос фиксируется в нижней роликовой части соответствующей бранши таким образом, что каждая из ветвей троса укладывается встречно в свою канавку на бранше, огибая ее по обе стороны нижней роликовой части и проходя соответствующие направляющие ролики поворотного корпуса, направляющие ролики корпуса-вилки через удлиненный полый трубчатый корпус к поворотным элементам тросового механизма для углового перемещения бранш. Третий трос обвивает направляющий канал поворотного корпуса и через удлиненный полый трубчатый корпус связан с поворотным элементом тросового механизма для углового перемещения поворотного корпуса концевого эффектора относительно оси удлиненного полого трубчатого корпуса. Изобретения обеспечивают повышение точности позиционирования и повышение манипуляционных возможностей хирургического инструмента. 3 н. и 13 з.п. ф-лы, 12 ил.
1. Манипулятор хирургического инструмента в составе автономного мобильного модуля роботизированного хирургического инструмента, включающий:
неподвижную платформу 14, подвижную платформу 13,
механизм параллельной кинематики, выполненный в виде гексапода, соединяющего неподвижную платформу 14 и подвижную платформу 13 и выполненного с возможностью управляемого маневрирования подвижной платформой 13;
привод 15, выполненный с возможностью присоединения к нему сменного хирургического инструмента 16 и приведения указанного хирургического инструмента 16 в движение,
узел сопряжения 17 упомянутого привода 15 с гексаподом, расположенный внутри гексапода и закрепленный на подвижной платформе 13, при этом узел сопряжения 17 выполнен с возможностью линейного перемещения привода 15 со сменным хирургическим инструментом 16 в возвратно-поступательном направлении через подвижную платформу 13.
2. Манипулятор по п. 1, в котором гексапод выполнен из шести исполнительных звеньев 18, каждое из которых с помощью шарниров 19 соединено одним концом с подвижной платформой 13, а другим - с неподвижной 14.
3. Манипулятор по п. 2, в котором исполнительное звено 18 может быть выполнено в виде линейного актуатора, состоящего из серводвигателя постоянного тока или шагового двигателя с шарико-винтовой передачей.
4. Манипулятор по п. 1, в котором узел сопряжения 17 выполнен состоящим из:
по меньшей мере двух направляющих 20, жестко закрепленных на подвижной платформе 13 и установленных перпендикулярно подвижной платформе 13,
по меньшей мере одного крепежного хомута 22, который размещен на направляющих 20 и в котором закреплен привод 15, перемещающийся по указанным направляющим 20,
и исполнительного механизма 23, обеспечивающего перемещение привода 15 со сменным хирургическим инструментом 16.
5. Манипулятор по п. 4, в котором исполнительный механизм 23 узла сопряжения 17 может быть выполнен в виде серводвигателя постоянного тока или шагового двигателя с шарико-винтовой передачей.
6. Манипулятор по п. 1, в котором привод 15 имеет корпус 27 цилиндрической формы с поверхностью доступа, в которой расположен механизм 31 быстросъемной установки или снятия сменного хирургического инструмента для соединения с корпусом хирургического инструмента.
7. Манипулятор по п. 6, в котором в качестве поверхности доступа механизма 31 быстросъемной установки или снятия сменного хирургического инструмента используется монтажная стыковочная платформа 34 корпуса привода.
8. Манипулятор по п. 7, в котором внутри корпуса 27 привода 15 дополнительно находится монтажная платформа 33, соединенная с монтажной стыковочной платформой 34 по меньшей мере четырьмя дистанционными стойками 35.
9. Манипулятор по п. 8, в котором на монтажной платформе 33 жестко закреплены по меньшей мере четыре двигателя 36 по кольцевой схеме, выполненные с возможностью передачи крутящего момента ведущим полумуфтам 39 привода.
10. Сменный хирургический рабочий инструмент для использования с приводом манипулятора по п. 9, включающий:
корпус, который выполнен в виде монтажной части 29 и удлиненного полого трубчатого корпуса 30, при этом монтажная часть 29 имеет поверхность доступа, в которой расположен механизм 31 быстросъемной установки или снятия сменного хирургического инструмента для соединения с корпусом привода 15, а удлиненный полый трубчатый корпус 30 выполнен с возможностью функционального взаимодействия с приводом 15;
хирургический концевой эффектор 32, который выполнен в виде шарнирной секции с поворотным корпусом 50 и корпусом-вилкой 53, при этом корпус-вилка 53 жестко соединен с дистальным концом удлиненного полого трубчатого корпуса 30, на оси корпуса-вилки 53 установлен поворотный корпус 50, на оси поворотного корпуса 50 установлены первая бранша 51 и вторая бранша 52, причем внутри монтажной части 29 находятся тросовый механизм, который содержит три поворотных элемента А, Б, В, выполненных с возможностью приема поворотного движения от привода 15, и тросы 56, 57, 63, закрепленные на поворотных элементах А, Б, В и проходящие через удлиненный полый трубчатый корпус 30 для соединения с элементами шарнирной секции концевого эффектора 32,
при этом тросы 56, 57 двух поворотных элементов А, Б передают тяговое усилие к каждой бранше 51, 52 для углового перемещения соответствующих первой бранши 51 и второй бранши 52 относительно продольной оси поворотного корпуса 50 концевого эффектора,
а трос 63 третьего поворотного элемента передает тяговое усилие поворотному корпусу 50 концевого эффектора для его углового перемещения относительно оси удлиненного полого трубчатого корпуса 30 хирургического инструмента,
механизм поворота концевого эффектора, который содержит механизм зубчатой передачи для поворота корпуса-вилки концевого эффектора вокруг оси удлиненного полого трубчатого корпуса хирургического инструмента, выполненный с возможностью приема поворотного движения от привода 15.
11. Хирургический инструмент по п. 10, в котором в качестве поверхности доступа механизма 31 быстросъемной установки или снятия сменного хирургического инструмента используется стыковочная монтажная платформа 43.
12. Хирургический инструмент по п. 11, в котором внутри монтажной части 29 корпуса находится верхняя монтажная платформа 44, соединенная со стыковочной монтажной платформой 43 по меньшей мере четырьмя дистанционными стойками 45.
13. Хирургический инструмент по п. 12, в котором на стыковочной монтажной платформе 43 и на верхней монтажной платформе 44 установлены оси ведомых полумуфт 46, которые входят в зацепление с соответствующими ведущими полумуфтами 39 привода 15 для приема крутящего момента от них и передачи поворотного движения тросовому механизму и механизму поворота концевого эффектора.
14. Хирургический инструмент по п. 11, в котором механизм быстросъемной установки или снятия сменного хирургического инструмента может быть выбран из: пружинный замок с защелками, байонетное соединение, резьбовая накидная гайка, магнитный замок.
15. Концевой эффектор хирургического рабочего инструмента по любому из пп. 10-14, содержащий:
корпус-вилку 53 с двумя направляющими роликами 60,
поворотный корпус 50, выполненный совместно с направляющим каналом 61, причем направляющий канал 61 поворотного корпуса 50, направляющие ролики 60 корпуса-вилки 53, расположенные по обе стороны от направляющего канала 60, установлены на оси 54 корпуса-вилки 53, бранши 51,52, каждая из которых имеет нижнюю роликовую часть и установлена на оси 55 поворотного корпуса 50, перпендикулярной оси 54 корпуса-вилки 53, при этом соответствующий трос 56, 57 фиксируется в нижней роликовой части соответствующей бранши 51, 52 таким образом, что каждая из ветвей троса укладывается встречно в свою канавку на бранше, огибая ее по обе стороны нижней роликовой части и проходя соответствующие направляющие ролики 59 поворотного корпуса, направляющие ролики 60 корпуса-вилки через удлиненный полый трубчатый корпус 30 к поворотным элементам А, Б тросового механизма для углового перемещения бранш 51, 52, а третий трос 63 обвивает направляющий канал 61 поворотного корпуса и через удлиненный полый трубчатый корпус 30 связан с поворотным элементом В тросового механизма для углового перемещения поворотного корпуса 50 концевого эффектора относительно оси удлиненного полого трубчатого корпуса 30.
16. Концевой эффектор по п. 15, в котором трос может быть выполнен из: металлических нитей, кевларовых нитей, полиэтиленовых нитей.
| WO 2008120753 A1, 09.10.2008 | |||
| РОБОТИЧЕСКАЯ СИСТЕМА ДЛЯ МИНИ-ИНВАЗИВНОЙ ХИРУРГИИ | 2012 |
|
RU2491161C1 |
| US 20110319913 A1, 29.12.2011 | |||
| CN 107334509 A, 10.11.2017 | |||
| US 20160249990 A1, 01.09.2016 | |||
| DE 19649082 C1, 08.01.1998 | |||
| US 20100004663 A1, 07.01.2010. | |||

