Изобретение относится к медицине, в частности к хирургии, и предназначено для применения во время проведения эндохирургических вмешательств.
В настоящее время уходят в прошлое оперативные вмешательства открытого типа, при которых часто наблюдаются послеоперационные осложнения и возникает наибольшее травмирование пациента, приводящее в конечном итоге к снижению трудоспособности.
На смену операциям открытого доступа происходит все более широкое внедрение эндовидеохирургических операций, которые обладают малой травматичностью и приводят пациентов к быстрому восстановлению после оперативного лечения.
Однако по мере широкого внедрения эндовидеохирургических технологий вскрылись технические проблемы и ограничения, связанные с их проведением. Современные эндоскопические инструменты не дают должного эффекта обратной связи с хирургом, особенно по части тактильной чувствительности и силы воздействия на ткани, и хорошим координационным взаимодействием (рука-глаз). У большинства эндоскопических манипуляторов имеется ограниченная в четырех плоскостях свобода действий, что ухудшает качество оперирования.
Физиологическое дрожание человеческой руки передается на инструменты, создавая трудности во время наложения анастомозов и прецизионной мобилизации. Внедрение робототехники позволяет преодолеть имеющиеся сложности и ограничения, решить вышеуказанные проблемы для расширения возможностей малотравматичной хирургии (Федоров А.В., Кригер А.Г. Роботохирургия // Хирургия. - 2008. - №12. - С.68-73).
На сегодняшний день в мире известны такие роботические хирургические системы как «Da Vinci», «Zeus», «AEZOP».
Известна медицинская роботизированная система для манипулирования медицинским инструментом, содержащая робот-манипулятор, который содержит основание, руку манипулятора, имеющую по существу вертикальную и горизонтальную части, запястный шарнир манипулятора и исполнительный блок для медицинского инструмента. Рука манипулятора имеет цилиндрическую (PRP) кинематическую конфигурацию для координатного перемещения запястного шарнира манипулятора. PRP конфигурация имеет призматическое (Р) первое сочленение (J1) для изменения высоты вертикальной части за счет поступательной степени свободы вдоль вертикальной оси, вращательное (R) второе сочленение (J2) для изменения угла поворота между вертикальной частью и горизонтальной частью за счет вращательной степени свободы вокруг по вертикальной оси и призматическое (Р) третье сочленение (J3) для изменения досягаемости горизонтальной части за счет поступательной степени свободы вдоль по горизонтальной оси [патент RU 2412799, 2011 г.].
Прототипом предлагаемой полезной модели является роботизированная хирургическая система для выполнения минимальных инвазивных вмешательств, содержащая панель управления и роботы-манипуляторы для манипулирования лапароскопическим инструментом. Робот-манипулятор имеет руку, поддерживаемый ею запястный шарнир и поддерживаемый им исполнительный блок. Рука обеспечивает три степени свободы посредством первого (J1), второго (J2) и третьего (J3) сочленений. Каждое из сочленений имеет привод для перемещения запястного шарнира. Запястный шарнир обеспечивает две степени свободы посредством четвертого (J4) и пятого (J5) сочленений. Сочленения (J4) и (J5) являются вращательными и имеют привод для настройки углов наклона исполнительного блока в поперечном и в продольном направлениях. Исполнительный блок содержит привод лапароскопического инструмента (ПЛИ) и обеспечивает одну степень свободы посредством вращательного шестого сочленения (J6), имеющего привод для настройки угла поворота ПЛИ. ПЛИ содержит гнездо с механизмом сцепления для прикрепления переходника хвостовика инструмента к исполнительному блоку и приводной механизм для приведения в действие соединенного с переходником лапароскопического инструмента. Исполнительный блок содержит датчик силомоментного очувствления с шестью степенями свободы и акселерометр с шестью степенями свободы [патент RU 2412800, 2011 г.].
Однако все эти роботические системы обладают рядом недостатков, основными из которых являются очень высокая стоимость как самой роботической системы, так и комплектующих к ней. Так же эти системы занимают значительное рабочее пространство в операционной, что приводит к неудобству нахождения в ней хирургов и медицинских сестер. Из-за сложной процедуры замены инструментов во время проведения хирургического вмешательства затрачивается значительное количество времени, которое в крайних случаях может стоить жизни оперируемым пациентам. Слабая маневренность и большие размеры манипуляторов, которые могут приводить к их столкновению во время операции, что может причинить серьезный риск для здоровья пациентов и врачей. Так же к недостаткам известных роботических систем можно отнести: относительно длительное время подготовки роботической системы; определенные трудности при выполнении операций на нескольких этажах брюшной полости, что обусловлено относительно медленными передвижениями камеры и манипуляторов при смене зоны оперирования; необходимость траты части времени на адаптацию системы к пациенту; сложность в обучении хирургов для работы с данной хирургической системой.
Одним из недостатков известных роботических систем является наличие жестко зафиксированной мертвой точки, то есть той точки, где не происходит движения инструмента. В известных роботических системах она реализована механически и требует обязательного расположения этой точки в месте операционного прокола.
Все это послужило серьезным основанием для разработки новой роботической системы для проведения эндовидеохирургических вмешательств, которая смогла бы избежать наличия представленных недостатков существующих на сегодняшний день роботических систем.
Задачей изобретения является разработка роботической системы для мини-инвазивной хирургии, которая должна отвечать ряду требований, а именно: 1) иметь невысокую стоимость самой роботической системы, а так же комплектующих к ней, которая позволит оснастить ей большинство лечебных учреждений;
2) достижение высокой эргономичности конструкции роботической системы, которая должна занимать незначительное рабочее пространство в операционной и иметь возможность быстрой и удобной смены инструментов во время оперативного вмешательства, а так же иметь высокую маневренность, которая позволит быстро передвигать камеру и манипуляторы при смене зоны оперирования;
3) отсутствие жесткой механической мертвой точки, то есть той точки, в которой не происходит движения инструмента.
4) простота в использовании, которая позволит быстро и качественно обучить практикующих хирургов, а так же операционных сестер работе с данной роботической системой.
Технический результат при использовании изобретения - высокая эргономичность; минимальные эксплуатационные и расходные затраты; маневренность; возможность использования в малых по площади операционных комнатах; легкость и удобство в управлении и обслуживании; надежность и безопасность во время работы.
Указанный технический результат достигается тем, что в роботической системе для мини-инвазивной хирургии, содержащей дистанционный пульт управления и 3-5 манипуляторов с инструментальной площадкой, содержащей блок инструментов с приводом, согласно изобретению каждый манипулятор содержит основание, в котором выполнено отверстие, закреплены четыре шаговых двигателя, каждый из которых на своем валу имеет рычаг, на конце которого с двух сторон зафиксированы верхние шарнирные наконечники, присоединенные к тягам, а другие концы тяг соединены с нижними шарнирными наконечниками, при этом нижние шарнирные наконечники присоединены к платформе, на которой вертикально запрессована бронзовая втулка с возможностью поворота вокруг оси Х вилки, на концах которой имеются отверстия, в которые продеты штифты инструментальной площадки с возможностью ее движения по оси Y, при этом инструментальная площадка снабжена двумя шаговыми двигателями, на валах которых закреплены колесики с зубьями, обеспечивающими зацеп за отверстия колесиков в блоке инструментов и механическую передачу поворота шаговых двигателей в поворот бранш или хвостовика инструмента вокруг оси, при этом один шаговый двигатель обеспечивает управлением браншами или хвостовиком инструмента, а другой - поворотом инструмента вокруг своей оси, причем манипуляторы через отверстия в основаниях жестко закреплены на несущей раме, выполненной с возможностью ее подвешивания на консоли к потолку операционной.
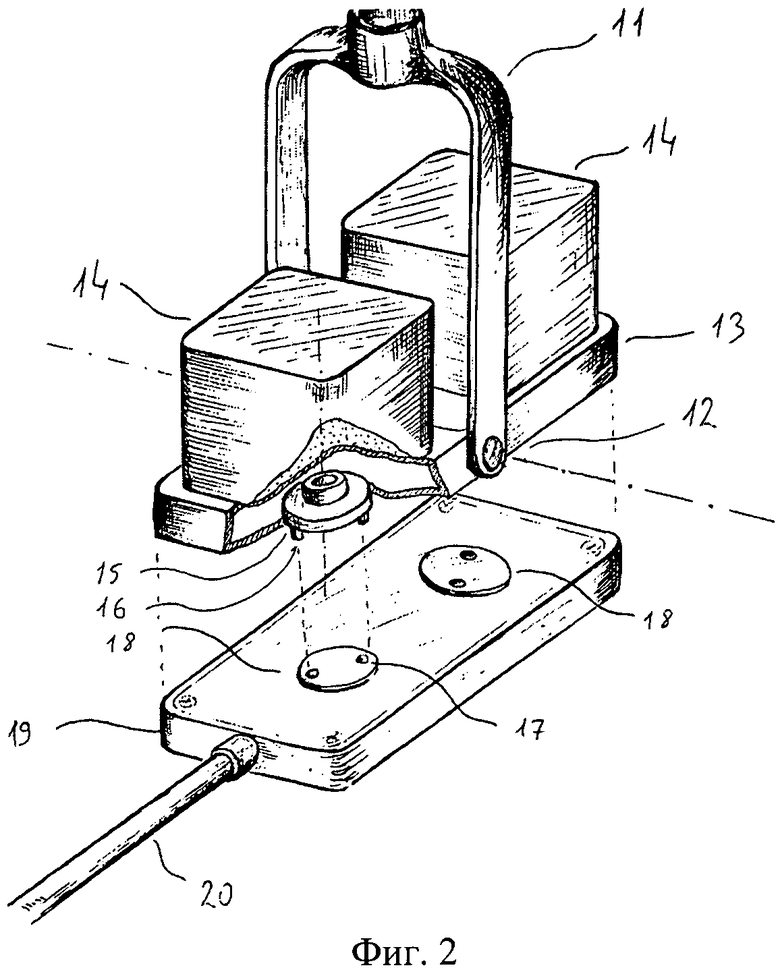
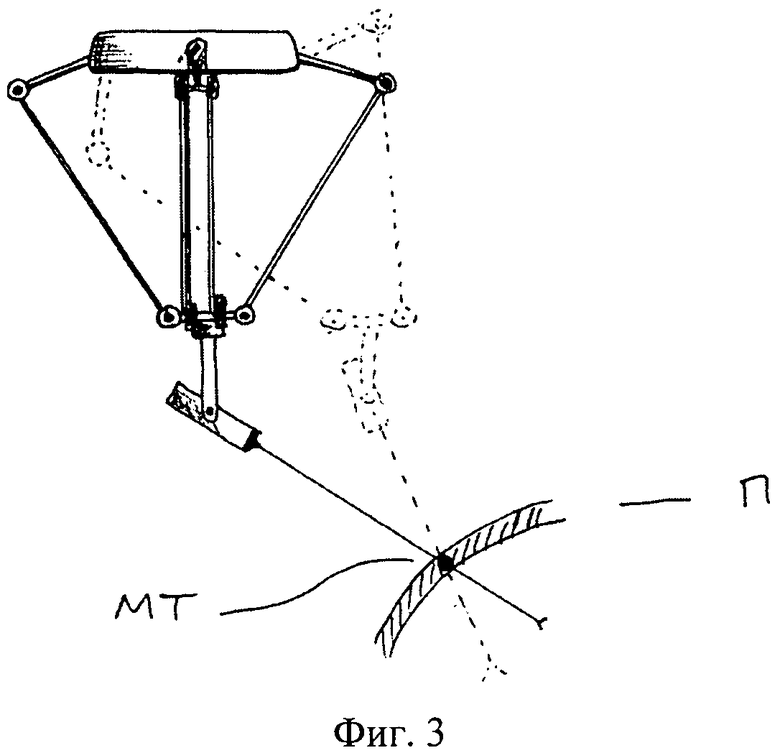
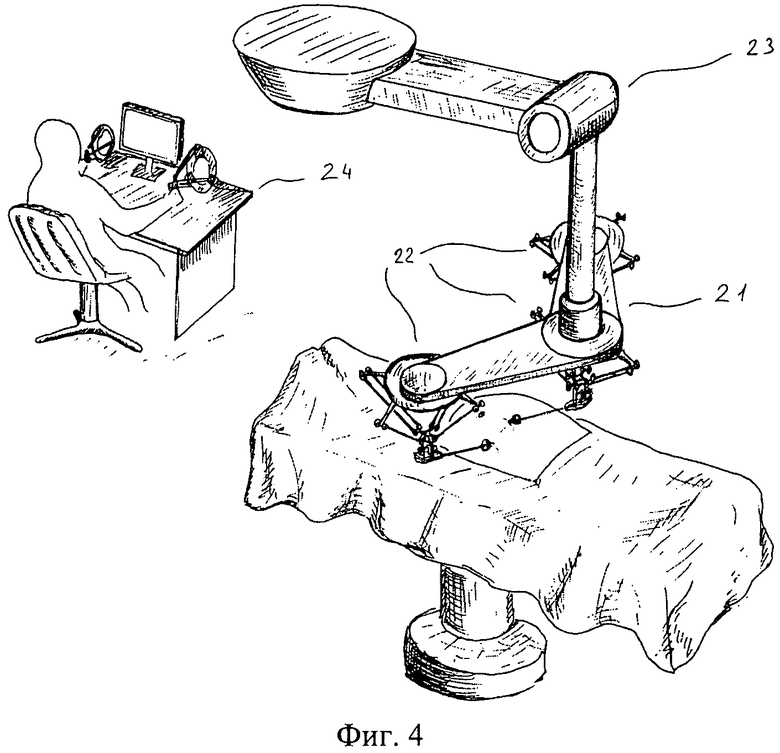
Сущность изобретения поясняется следующими фигурами: на фиг.1 манипулятор предлагаемой роботизированной системы, общий вид; на фиг.2 - инструментальная площадка с блоком инструмента; на фиг.3-мертвая точка предлагаемой модели хирургического робота; на фиг.4 - общий вид работы предлагаемой роботической системы.
Предлагаемая хирургическая роботическая система содержит дистанционный пульт, с помощью которого осуществляется управление манипуляторами в количестве от трех до пяти, жестко закрепленными на несущей раме, которая подвешена на консоли к потолку операционной. Консоль обеспечивает перемещение рамы с хирургическими манипуляторами в 3-х пространствах X, Y и Z вокруг пациента в зависимости от хирургического доступа и области оперирования.
Все хирургические манипуляторы имеют одинаковую конструкцию параллельного робота: содержат основание 1, на котором выполнено отверстие 2 и закреплены четыре шаговых двигателя 3, каждый из которых на своем валу имеет рычаг 4. С двух сторон на конце рычагов болтами 5 прикручены верхние шарнирные наконечники 6. Таким образом, на каждом рычаге имеется два верхних шарнирных наконечника. Верхние шарнирные наконечники прикручены к тягам 7, другие концы тяг соединены с нижними шарнирными наконечниками 8. Нижние шарнирные наконечники болтами прикручены к платформе 9, на которой вертикально запрессована бронзовая втулка 10, обеспечивающая поворот вокруг оси Х вилки 11. На концах вилки имеется отверстия 12, в которые продеты штифты инструментальной площадки 13 и обеспечивающие движения по оси Y. Таким образом, данная конструкция имеет три степени свободы и позволяет производить движения по осям X, Y и Z, сохраняя пространственную ориентации платформы 9 (фиг.1).
Инструментальная площадка предназначена для фиксации сменного инструмента и управления им. На инструментальной площадке 13 размещены два шаговых двигателя 14. На валах шагового двигателя 14 закреплены колесики 15, имеющие зубья 16. С помощью этих зубьев происходит зацеп за отверстия 17 колесиков 18 в блоке 19 инструментов и механическая передача поворота шаговых двигателей в поворот бранш или хвостовика инструмента 20 вокруг оси. Один шаговый двигатель обеспечивает управлением браншами инструментов, а другой - поворотом инструмента вокруг своей оси (фиг.2). Через отверстия 2 в основаниях 1 на несущей раме 21 с помощью болтов жестко закреплены манипуляторы 22. Несущая рама 21 подвешена на консоли 23 к потолку операционной. Манипуляторы 22 соединены с дистанционным пультом управления 24 (фиг.4).
Изобретение используется следующим образом.
Хирург садится за дистанционный пульт управления роботической сиcтемы для проведения эндовидеохирургических вмешательств, и после нажатия комбинации клавиш приводит ее в рабочее состояние, в результате чего блоки манипуляторов роботической системы опускаются с несущей рамы, которая крепится к потолку. При этом операционная сестра находится в непосредственной близости от пациента и манипуляторов и по команде хирурга устанавливает в манипуляторы необходимые инструменты и эндоскопическую камеру, после чего хирург, находящийся за пультом управления, начинает оперативное лечение пациента.
В предлагаемой конструкции мертвая точка не имеет фиксированного расположения, она может располагаться в любом месте инструмента, в месте прокола мягких тканей (фиг.3).
При этом операционная сестра должна постоянно находиться вблизи манипуляторов для своевременной смены инструментов в течение операции.
После окончания оперативного лечения операционная сестра удаляет инструменты из манипуляторов, а хирург приводит роботическую систему в выключенное состояние, при котором блоки манипуляторов вновь поднимаются вверх к потолочной консоли.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРОФИЛАКТИКИ ОБРАЗОВАНИЯ ГРЫЖ ПОСЛЕ ЭНДОВИДЕОХИРУРГИЧЕСКИХ ОПЕРАЦИЙ | 2013 |
|
RU2525279C1 |
| СПОСОБ ФИКСАЦИИ ЖЕЛЧНОГО ПУЗЫРЯ ПРИ ЛАПАРОСКОПИЧЕСКОЙ ХОЛЕЦИСТЭКТОМИИ | 2010 |
|
RU2440040C1 |
| МЕДИЦИНСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2007 |
|
RU2412799C2 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МИНИМАЛЬНЫХ ИНВАЗИВНЫХ ВМЕШАТЕЛЬСТВ | 2007 |
|
RU2412800C2 |
| Автономный мобильный модуль роботизированного хирургического инструмента | 2019 |
|
RU2715684C1 |
| СПОСОБ ТОЧНОГО НАНЕСЕНИЯ КЛЕЕВОЙ КОМПОЗИЦИИ В ХИРУРГИЧЕСКОЙ ПРАКТИКЕ | 2011 |
|
RU2449812C1 |
| СПОСОБ ХИРУРГИЧЕСКОЙ ПРОФИЛАКТИКИ ГРЫЖЕВЫХ ОСЛОЖНЕНИЙ У БОЛЬНЫХ С ОЖИРЕНИЕМ ПРИ ПРОВЕДЕНИИ ЛАПАРОСКОПИЧЕСКИХ ОПЕРАЦИЙ | 2011 |
|
RU2454952C1 |
| ПРИВОД ДЛЯ ИНСТРУМЕНТА ЭНДОСКОПИЧЕСКОГО ХИРУРГИЧЕСКОГО АППАРАТА | 2014 |
|
RU2570939C1 |
| Устройство управления манипуляторами роботохирургического комплекса | 2020 |
|
RU2757969C1 |
| Ведущий манипулятор роботохирургического комплекса | 2022 |
|
RU2803231C1 |
Изобретение относится к медицине, и предназначено для применения во время проведения эндохирургических вмешательств. Роботическая система содержит дистанционный пульт управления и 3-5 манипуляторов с инструментальной площадкой, содержащей блок инструментов с приводом. Каждый манипулятор содержит основание, четыре шаговых двигателя, имеющих на своем валу рычаг, на конце которого с двух сторон зафиксированы верхние шарнирные наконечники, присоединенные к тягам, а другие концы тяг соединены с нижними шарнирными наконечниками. Нижние шарнирные наконечники присоединены к платформе, на которой вертикально запрессована бронзовая втулка с возможностью поворота вокруг оси Х вилки с отверстиями на концах, в которые продеты штифты инструментальной площадки для ее движения по оси Y. Инструментальная площадка снабжена двумя шаговыми двигателями, на валах которых закреплены колесики с зубьями, обеспечивающими зацеп за отверстия колесиков в блоке инструментов и механическую передачу поворота шаговых двигателей в поворот бранш или хвостовика инструмента вокруг оси. Один шаговый двигатель обеспечивает управление браншами или хвостовиком инструмента, а другой - поворот инструмента вокруг своей оси. Манипуляторы через отверстия в основаниях жестко закреплены на несущей раме, подвешенной на консоли к потолку операционной. Использование изобретения повышает эргономичность роботической системы, ее маневренность, надежность и безопасность. 4 ил.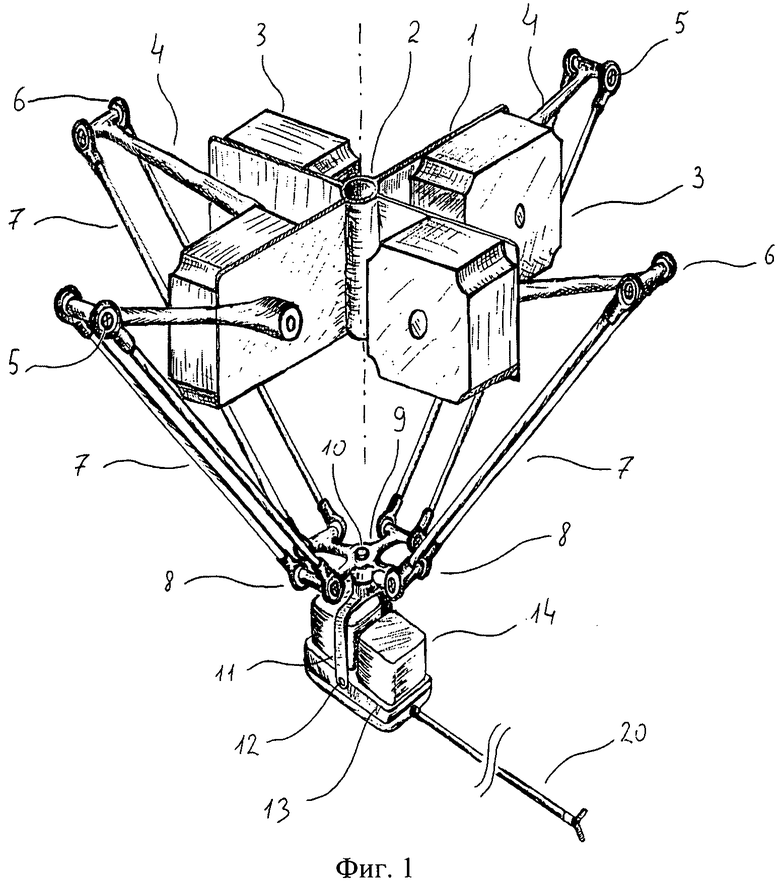
Роботическая система для мини-инвазивной хирургии, содержащая дистанционный пульт управления и 3-5 манипуляторов с инструментальной площадкой, содержащей блок инструментов с приводом, отличающаяся тем, что каждый манипулятор содержит основание, в котором выполнено отверстие, закреплены четыре шаговых двигателя, каждый из которых на своем валу имеет рычаг, на конце которого с двух сторон зафиксированы верхние шарнирные наконечники, присоединенные к тягам, а другие концы тяг соединены с нижними шарнирными наконечниками, при этом нижние шарнирные наконечники присоединены к платформе, на которой вертикально запрессована бронзовая втулка с возможностью поворота вокруг оси Х вилки, на концах которой имеются отверстия, в которые продеты штифты инструментальной площадки с возможностью ее движения по оси Y, при этом инструментальная площадка снабжена двумя шаговыми двигателями, на валах которых закреплены колесики с зубьями, обеспечивающими зацеп за отверстия колесиков в блоке инструментов и механическую передачу поворота шаговых двигателей в поворот бранш или хвостовика инструмента вокруг оси, при этом один шаговый двигатель обеспечивает управление браншами или хвостовиком инструмента, а другой - поворот инструмента вокруг своей оси, причем манипуляторы через отверстия в основаниях жестко закреплены на несущей раме, выполненной с возможностью ее подвешивания на консоли к потолку операционной.
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МИНИМАЛЬНЫХ ИНВАЗИВНЫХ ВМЕШАТЕЛЬСТВ | 2007 |
|
RU2412800C2 |
| Робот-ассистированная резекция почки | |||
| Экспериментальная и клиническая урология | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Робот-ассистированные операции в абдоминальной хирургии | |||
| Федоров А.В | |||
| и др | |||
| Хирургия | |||
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| WO 1997029690 A1, 21.08.1997 | |||
| RU 2009119356 A, 27.11.2010 | |||
| WO 2009057347 A1, 07.05.2009. | |||

