Область техники, к которой относится изобретение
Изобретение относится к измерительной технике, предназначено для одновременного измерения линейных и угловых ускорений объекта во всех возможных направлениях в пространстве, используется для навигации.
Уровень техники
Известна конструкция акселерометра с Брэгговскими решетками: Kuo Li и др., «Very sensitive fiber Bragg grating accelerometer using transverse forces with an easy over-range protection and low cross axial sensitivity», 30 August 2013, Applied Optics. Устройство использует инерционную массу, закрепленную с обеих сторон участками оптического волокна с волоконной Брэгговской решеткой (ВБР). Эти участки используются в качестве пружинных элементов и жестко прикреплены к объекту, ускорение которого измеряется. При ускорениях в поперечных волокну направлениях масса растягивает волокно с ВБР, что приводит соответственно к изменению длины волны Брэгга. Такой акселерометр очень чувствителен, т.к. слегка растянутая ВБР более чувствительна к поперечным силам, чем к осевым. Его резонансная частота и статическая чувствительность анализируются классической теорией пружинной массы. Приведены формулы подсчета ускорений и результаты испытаний.
Однако такое устройство измеряет только линейные ускорения объекта, причем действующие только в плоскости, перпендикулярной изначальному направлению оптического волокна с инерционной массой.
Ближайшим прототипом предлагаемого изобретения является изобретение по патенту РФ №2716867 от 17.03.2020 «Система измерения трехмерного линейного и углового ускорения и перемещения объекта в пространстве с использованием волоконных Брэгговских решеток».
Чувствительная масса в виде грузика посредством волоконно-оптического световода с ВБР подвешена внутри герметичного корпуса датчика. Световод по меньшей мере пять раз проходит через корпус и мерный грузик, образуя по меньшей мере десять измерительных участков между корпусом и мерным грузиком, на каждом измерительном участке между корпусом и мерным грузиком световод содержит в себе ВБР. Указанные участки оптического волокна используются в качестве упругих элементов, традиционно применяемых в акселерометрах.
Сформированные в оптическом волокне ВБР являются оптическими фильтрами для широкополосного лазерного излучения в световоде, которое формирует фотонный резонанс на определенной длине волны для каждой ВБР в соответствии с законом Брэгга. ВБР при ускорениях корпуса деформируются, что приводит к изменению отраженной от них длины волны. Эти изменения фиксируются оптическими устройствами с высокой точностью. Далее подсчитываются величины относительной деформации на основании ее линейной зависимости от изменения длины волны фотонного резонанса. Техническим результатом изобретения названа устойчивость к электромагнитным помехам при измерении линейного и углового ускорения объекта в пространстве, за счет чего достигается надежность и точность измерения.
В предложенной указанным выше патентом конструкции для измерения угловых ускорений имеются участки волокна, прикрепленные со смещением от центральной оси грузика. Таких участков три, по одному для каждой оси вращения. Они служат для индикации ускорения путем сравнения их деформации с деформацией параллельных им волокон, размещенных вдоль центральной оси грузика.
В такой конструкции линейное ускорение, которое почти всегда сопутствует угловому ускорению, приводит к ненужному дополнительному вращению грузика из-за асимметричного крепления двух участков волокна относительно центральной оси. Кроме того, на деформацию каждого участка волокна действуют ускорения во всех возможных направлениях. Все это требует создания полной математической модели для разделения ускорений по типу - линейное ускорение или угловое, и по трем осям пространства. Это крайне сложно и затратно по вычислительным возможностям. Однако формулы и способы подсчета как угловых, так и линейных ускорений на основании измеренной величины деформации участков волокна в рассмотренном изобретении не приводятся.
Также отметим, что оптическое волокно используется здесь в качестве упругого элемента с деформациями продольного растяжения-сжатия, что создает значительные ограничения на измерительный диапазон. Оптическое волокно имеет ограниченную степень растяжения вдоль своей оси, материал сердцевины и оболочки волокна - кварц - не обладает достаточно упругими свойствами, чтобы осуществлять его неразрушающее растяжение и сжатие в широком интервале.
Раскрытие сущности изобретения
В конструкцию универсального инерциального волоконно-оптического акселерометра входят три датчика линейного ускорения и три датчика углового ускорения. Оси датчиков каждого типа взаимно перпендикулярны. Ось каждого датчика линейного ускорения совпадает с осью либо параллельна оси одного из датчиков углового ускорения. Все датчики используют оптическое волокно с ВБР, прикрепленное к пружине по ее длине, и испытывают изгибную деформацию при соответствующих им ускорениях. ВБР каждого датчика имеет свою уникальную для упомянутого акселерометра резонансную длину волны. Оптическое волокно от каждого датчика подключено к измерительной оптической системе.
ВБР являются оптическими фильтрами для широкополосного лазерного излучения в оптическом волокне, являющемся световодом. Указанное излучение исходит от источника излучения измерительной оптической системы и формирует оптоволоконный фотонный резонанс на определенной длине волны для каждой ВБР в соответствии с законом Брэгга. Это приводит к изменению длины волны отраженного от решеток сигнала, которое поступает от ВБР в измерительную оптическую систему, где фиксируется оптическими устройствами в виде видеокадров с высокой точностью и частотой. Затем полученные видеокадры преобразуются в цифровой вид, поступают в компьютер и пересчитываются в значения ускорений в реальном масштабе времени.
Техническим результатом изобретения является повышение точности и надежности измерения всех возможных ускорений объекта в широком диапазоне за счет предложенной конструкции и высокоточного подсчета изгибной деформации оптического волокна.
Краткое описание чертежей
Изобретение поясняется чертежами, на которых:
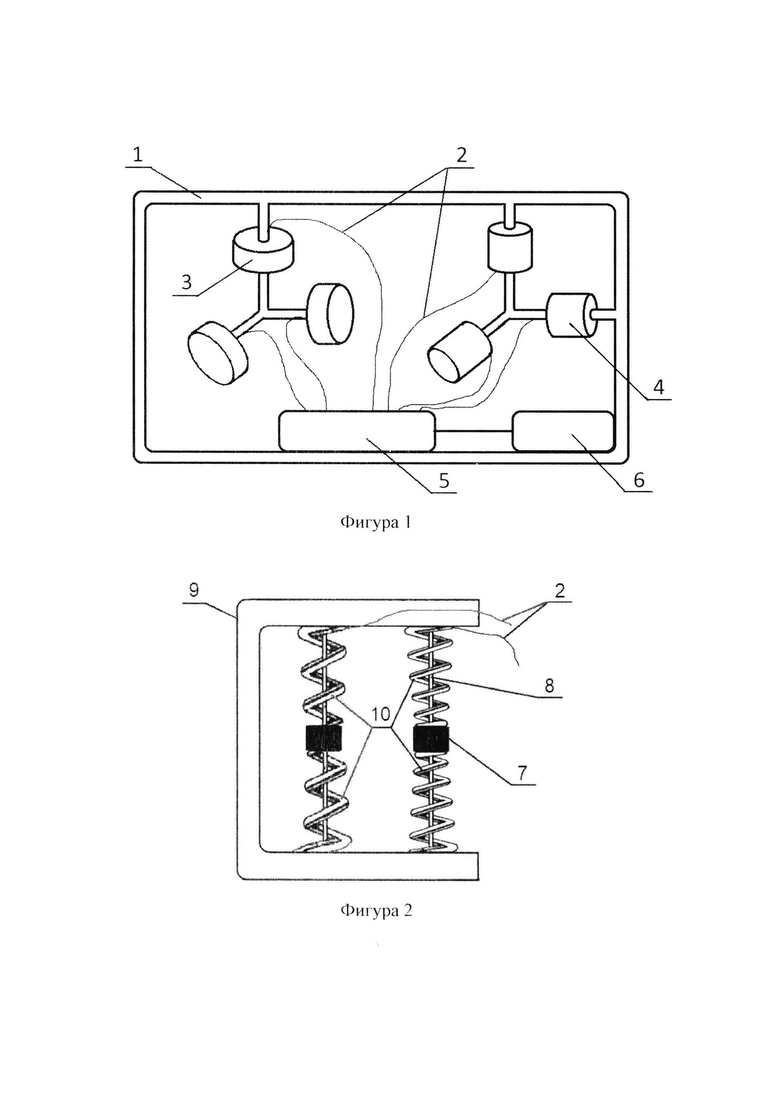
фиг. 1 показывает устройство универсального инерциального волоконно-оптического акселерометра;
фиг. 2 показывает схему датчика линейного ускорения;
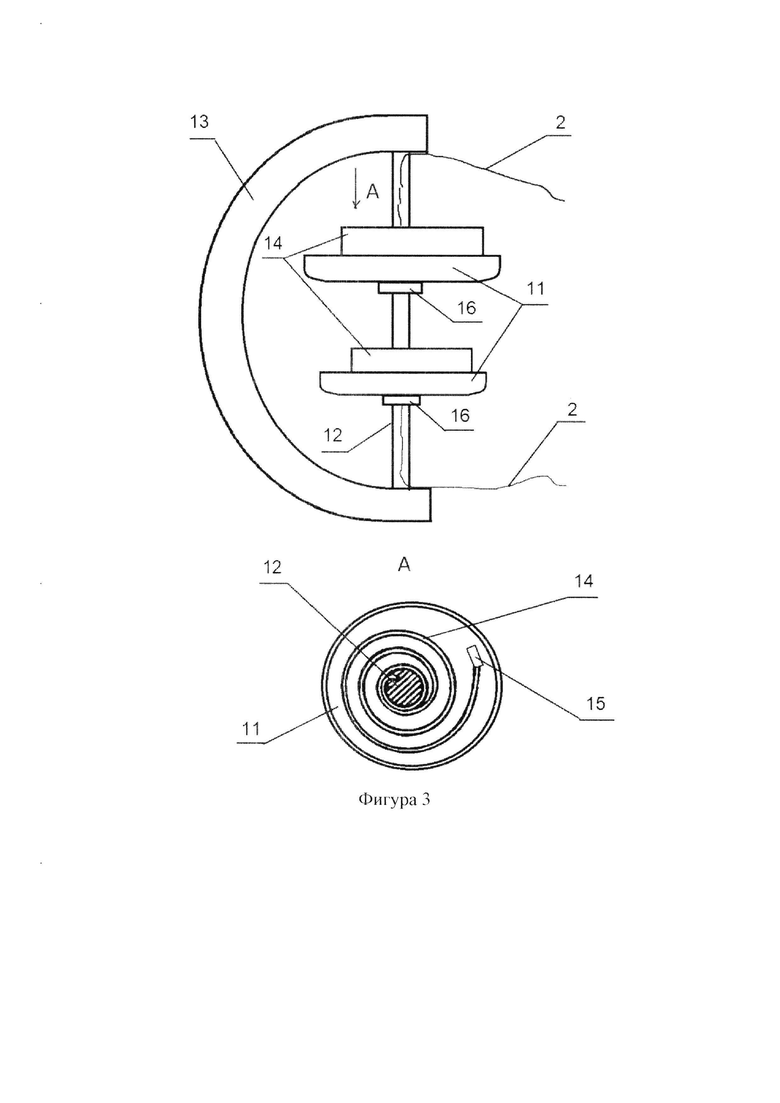
фиг. 3 показывает схему датчика углового ускорения.
Осуществление изобретения
Универсальность акселерометра достигается одновременным измерением линейных и угловых ускорений по трем осям пространства.
В едином корпусе 1 (фиг. 1) установлены три датчика линейного ускорения 4 (фиг. 1), три датчика углового ускорения 3 (фиг. 1), измерительная оптическая система 5 (фиг. 1) и компьютер 6 (фиг. 1).
Рассмотрим устройство датчика линейного ускорения (фиг. 2). Пробная инерционная масса 7 помещена на жесткую ось 8, закрепленную в корпусе 9 датчика и задающую направление движения пробной инерционной массы. Жесткая ось строго определяет вектор чувствительности измерения. Благодаря профильному исполнению жесткая ось не позволяет осуществлять вращение вокруг нее пробной инерциальной массы, что исключает ошибки и помехи измерения от других возможных направлений движения пробной инерциальной массы. Применение линейного подшипника уменьшает трение при линейном движении пробной массы и увеличивает чувствительность линейного измерения. Используя пружины различной жесткости, возможно производить как очень чувствительные измерения линейного ускорения при применении пружин с малой жесткостью, так и измерения высоких и сверхвысоких линейных ускорений. Наличие линейной направляющей в виде жесткой оси позволяет разместить на концевых участках движения пробной инерциальной массы упругие стопорные элементы, которые обеспечат целостность конструкции даже при нагрузках, превышающих измерительные пределы на пороге конструкционной прочности изделия. Инерционная масса закреплена с обеих сторон пружинами 10, жестко соединенными с держателями. Это плоские спиральные пружины, формирующие цилиндрический пружинный подвес. Оптическое волокно 2 приклеено к плоской поверхности этих пружин по их длине с одной или несколькими ВБР на каждой из них.
При наличии ускорения вдоль жесткой оси датчика одна его пружина сжимается, а другая разжимается, при этом происходит деформация изгиба оптического волокна и имеющихся в нем ВБР. Оптическое волокно соединяет датчик линейного ускорения с циркулятором.
В конструкции датчика углового ускорения (фиг. 3) пробное инерциальное тело 11 в виде сплошного диска или тонкого цилиндра, возможно с приподнятыми краями, являющееся телом вращения, располагается на направляющей 12, проходящей через его центр перпендикулярно его поверхности. Направляющая жестко закреплена в корпусе 13, и ее положение является осью измеряемого ускорения вращения. Рядом с плоскостью пробного тела вдоль его поверхности располагается кольцевая пружина 14 в виде ленты упругого материала, свернутой по спирали. Один конец пружины жестко закреплен на направляющей, а второй ее конец 15 закреплен на пробном теле ближе к его краю. Благодаря центральному подшипнику 16 пробное тело свободно вращается вокруг направляющей. Внутренняя часть подшипника жестко закреплена на направляющей, а внешняя часть подшипника жестко закреплена в пробном теле. Таким образом, исключены любые движения пробного тела, кроме вращения вокруг направляющей.
Пробное тело под действием закрепленной пружины находится в равновесии и может вращаться на направляющей по часовой стрелке и против часовой стрелки, испытывая действие силы инерции и силы упругости закрепленной пружины, которая стремится вернуть пробное тело в начальное состояние. Стопорные ограничители вращения задают его предельное угловое вращение, предохраняя датчик от разрушения при предельных нагрузках. Оптическое волокно 2 с одной или несколькими ВБР приклеено к поверхности плоской спиральной пружины вдоль ее длины. При сжатии или растяжении спиральной пружины, которое вызвано вращением пробного тела под действием ускорения, волокно с ВБР испытывает деформацию изгиба.
Высокая чувствительность измерения деформации волокна позволяет использовать очень жесткие пружины, что дает многократное расширение измерительного диапазона по сравнению с акселерометрами, использующими только волокно в качестве упругого элемента.
Подбором жесткости пружины, ее длины вдоль спирали, толщины и ширины устанавливаются чувствительность и пределы измерения смещения пробного тела. Кроме того, размещение в датчике нескольких описанных выше измерительных конструкций с различной жесткостью пружин дополнительно расширяет пределы измерения и чувствительности. Для этого в конструкцию датчика линейного ускорения добавляется одна или две жесткие оси со своими пружинами так, чтобы все оси были параллельны. А в конструкцию датчика углового ускорения на существующую направляющую добавляется одно или два пробных тела, каждое со своей пружиной. Таким образом, возможно определить ускорения в широком диапазоне с необходимой точностью.
На фиг. 2 и фиг. 3 приведены варианты датчиков с двумя измерительными конструкциями.
В соответствии с количеством измерительных конструкций каждый датчик может иметь несколько отдельных каналов измерения с различными чувствительностью и диапазоном измеряемых ускорений.
Оптические волокна 2 (фиг. 1) от каждого датчика подключены к оптической измерительной системе. Она включает в себя источник излучения - сверхлюминесцентный лазерный диод, циркулятор, анализатор спектра оптического сигнала с АЦП. Сверхлюминесцентный лазерный диод генерирует излучение в виде светового сигнала, которое по оптическому волокну через циркулятор доходит до каждой ВБР на датчиках и частично отражается от них, изменив при этом длину волны. Динамическая оценка этого изменения длины волны определяется деформацией оптического волокна. Циркулятор за счет эффекта поляризации выделяет отраженный от ВБР сигнал, направляя его на анализатор спектра оптического сигнала. Здесь происходят оптические преобразования, распределяющие множество монохроматических изображений в плоскости детектора. Для детектирования измеряемого светового потока и преобразования его в цифровой вид используется прибор с зарядовой связью.
Полученный цифровой вид сигнала обрабатывается специальным программным обеспечением в компьютере. Проводится подсчет величины деформации каждого оптического волокна с высоким разрешением в реальном масштабе времени с частотой измерений от единиц герц до десятков килогерц. В расчетах необходимо учесть, что пружина с приклеенным к ней оптическим волокном является по сути композитным материалом, и модуль упругости этого материала рассчитывается как
Е=EПVП+ЕBVB,
где
ЕП - модуль Юнга пружины;
VП - объемная доля материала пружины в композите;
ЕВ - модуль Юнга волокна;
VB - объемная доля материала волокна в композите.
Поскольку ЕП и VП значительно больше, чем ЕВ и VB соответственно, материал пружины значительно укрепляет общий с волокном упругий элемент.
Предварительно проведенные на стендах ускорений работы с описанной конструкцией акселерометра устанавливают зависимость величины деформации оптического волокна каждого датчика от соответствующего ускорения. По этим данным при движении объекта в пространстве в реальном масштабе времени вычисляются значения всех его ускорений.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПРЕЦИЗИОННОЙ КАЛИБРОВКИ ВОЛОКОННО-ОПТИЧЕСКИХ ДАТЧИКОВ С РЕШЁТКОЙ БРЭГГА | 2020 |
|
RU2728725C1 |
| Система измерения трёхмерного линейного и углового ускорения и перемещения объекта в пространстве с использованием волоконных брэгговских решеток | 2019 |
|
RU2716867C1 |
| МОБИЛЬНЫЙ ЛАЗЕРНЫЙ ЭМИССИОННЫЙ АНАЛИЗАТОР ВЕЩЕСТВ | 2020 |
|
RU2751434C1 |
| АДАПТИВНОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ СНАРЯДА НА ЭТАПЕ ВНУТРЕННЕЙ БАЛЛИСТИКИ | 2021 |
|
RU2780667C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ДЛЯ НЕПРЕРЫВНОГО ИЗМЕРЕНИЯ ВЯЗКОСТИ ТЕКУЧЕЙ СРЕДЫ | 2020 |
|
RU2755782C1 |
| ЦИФРОВОЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ПЕРЕМЕЩЕНИЯ | 2016 |
|
RU2674574C2 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ТЕНЗОМЕТРИЧЕСКИЙ ДАТЧИК | 2015 |
|
RU2643686C2 |
| ЦИФРОВОЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ПЕРЕМЕЩЕНИЯ | 2022 |
|
RU2813169C1 |
| Способ повышения спектральной чувствительности брэгговского преобразователя деформации балочного типа | 2017 |
|
RU2655471C1 |
| Адресная волоконная брэгговская структура | 2025 |
|
RU2841047C1 |
Изобретение относится к измерительной технике. В конструкцию акселерометра входят три датчика линейных ускорений и три датчика угловых ускорений. Оси датчиков каждого типа взаимно перпендикулярны. Датчики используют оптическое волокно с решеткой Брэгга, приклеенное к пружине, и испытывают изгибную деформацию при ускорениях. Материал пружины своей жесткостью нормирует растяжение - сжатие оптического волокна, повышая надежность конструкции датчика и расширяя диапазон измеряемых ускорений. Этот диапазон еще более расширяется при размещении в датчике нескольких измерительных элементов с пружинами различной жесткости. Оптические волокна от датчиков подключены к оптической измерительной системе, обрабатывающей световой поток от решеток Брэгга и преобразующей его в цифровой вид. При изменении длины волны светового потока от каждого датчика компьютер в реальном масштабе времени с частотой измерений от единиц герц до десятков килогерц вычисляет деформацию и соответствующее ускорение. Технический результат - повышение точности и надежности измерения всех возможных ускорений объекта в широком диапазоне. 3 ил.
Устройство для измерения линейных и угловых ускорений объекта в пространстве, включающее оптическое волокно с волоконными Брэгговскими решетками, измерительную оптическую систему, компьютер, отличающееся тем, что в него входят три датчика линейного ускорения и три датчика углового ускорения, оси датчиков линейного ускорения взаимно перпендикулярны, датчики углового ускорения сориентированы по этим же осям, датчик линейного ускорения имеет корпус с жесткой осью, пронизывающей пробную инерционную массу, две пружины, удерживающие пробную инерционную массу с двух сторон и прикрепленные к ней и к корпусу, и оптическое волокно, прикрепленное к пружинам по их длине так, чтобы на каждой из них находилась по меньшей мере одна волоконная Брэгговская решетка, и присоединенное к измерительной оптической системе; датчик углового ускорения имеет корпус с жесткой осью, к которой одним концом прикреплена кольцевая пружина, другим концом прикрепленная к пробному инерциальному телу, которое имеет возможность вращения вокруг жесткой оси, и оптическое волокно по меньшей мере с одной волоконной Брэгговской решеткой, прикрепленное к пружине по ее длине, присоединенное к измерительной оптической системе.
| Система измерения трёхмерного линейного и углового ускорения и перемещения объекта в пространстве с использованием волоконных брэгговских решеток | 2019 |
|
RU2716867C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ АКСЕЛЕРОМЕТР | 1991 |
|
RU2010235C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ АКСЕЛЕРОМЕТР | 1996 |
|
RU2115933C1 |
| WO 2011141445 A1, 17.11.2011. | |||

