Область техники, к которой относится изобретение
Данное изобретение относится к двухколёсным транспортным средствам, таким как велосипеды и мотоциклы.
Уровень техники
Повсеместно встречаются такие транспортные средства, как велосипед и мотоцикл. Это - одноколейные двухколёсные транспортные средства (то есть имеющие два колеса: одно - спереди, другое - сзади по ходу движения), далее – "ТС". Обычно переднее колесо крепится в рулевой колонке, а повороты ТС осуществляются поворотом руля.
На одноколейном транспорте существует проблема выполнения поворотов, которой нет на другом транспорте. Наклон ТС жёстко связан с поворотом руля и со скоростью ТС. Пусть ТС едет прямо, а водителю надо повернуть налево. Если при движении резко повернуть руль влево, то ТС сильно наклонится вправо, что может привести к падению (аналогично – в другую сторону). Водителю необходимо сначала наклонить ТС влево, а потом повернуть руль влево. Говоря точнее, водителю надо сместить влево центр масс системы водитель-ТС относительно точек контакта колёс с дорогой.
Но чтобы наклонить ТС влево, водитель кратковременно поворачивает руль вправо. Этот приём называется контррулением. В случае же, если водителю надо ехать прямо, а ТС по какой-то причине заваливается налево, водитель вынужден повернуть налево, чтобы не допустить падения ТС. То есть водитель ТС вынужден делать лишний поворот рулём, который может быть опасен.
Существуют изобретения, позволяющие управлять наклоном ТС кроме руления. Есть ряд ТС, использующих гироскоп, например изобретение US 2013/0233100 A1, где устранение наклона ТС осуществляется за счёт гироскопического момента маховика (реакция маховика на смену положения полярной оси). Но гироскопы очень тяжелы, дороги и малоэффективны. Есть более эффективное изобретение RU 2629764 - механизм, осуществляющий наклон ТС за счёт раскручивания и остановки маховиков с осью вращения вдоль направления движения ТС.
ТС, оснащённые изобретением RU 2629764, наиболее близки к данному изобретению, но имеет тот же недостаток, что и изобретения типа US 2013/0233100 A1: значительный вес маховиков и двигателя маховиков.
В данном изобретении смещение центра масс системы ТС-водитель (далее "ЦМ") относительно опорных точек (то есть точек контакта колёс с дорогой) осуществляется благодаря особой конструкции ТС. Преимущества данного изобретения перед аналогами: лучшая эффективность, меньший вес и меньшая стоимость производства.
Раскрытие изобретения
Идея изобретения состоит в особой конструкции ТС (схожей с классическим велосипедом и мотоциклом), позволяющей смещать ЦМ влево или вправо (относительно направления движения) без поворота руля и изменения скорости движения. Конструктивно для этого переднему колесу ТС придаётся дополнительная степень свободы (относительно рамы) - поступательное движение влево и вправо. Это представляет новизну и имеет изобретательский уровень. За это движение отвечает особый механизм. Это движение (далее - "движение сдвига") управляемо и ограничено, в пределах нескольких сантиметров.
Работа особого механизма проявляется в двух факторах:
1) Во время движения сдвига, при наличии контакта переднего колеса с дорогой. Движение сдвига вызывает реактивную силу со стороны дорожного покрытия, направленную в противоположном сдвигу направлении, которая будет передаваться ТС в целом. Таким образом, сдвиг колеса относительно рамы влево, вызовет силу, толкающую ТС вправо (и наоборот). Импульс смещения в сторону, переданный центру масс ТС, сохранится и после завершения движения сдвига.
2) По окончанию движения сдвига (даже при отсутствии контакта колёс с дорогой во время движения сдвига). ЦМ оказывается смещённым в сторону относительно опорных точек, что под действием силы тяжести вызовет заваливание и дальнейшее движение центра масс в ту же сторону.
Под смещением ЦМ подразумевается рассматриваемое на виде сверху смещение точки, соответствующей ЦМ относительно прямой линии, соединяющей точки контакта колёс с дорогой.
Существенные признаки изобретения:
- рама;
- заднее колесо;
- рулевая колонка;
- переднее колесо, закреплённое в рулевой колонке;
- механизм поступательного движения переднего колеса вдоль своей оси либо механизм поступательного движения рулевой колонки относительно рамы ТС (причём траектория этого движения не лежит в продольной вертикальной плоскости рамы).
Во втором варианте механизма траектория поступательного движения может быть разнообразной (при этом ось рулевой колонки остаётся параллельной себе в пространстве рамы). Любое такое движение вызовет смещение ЦМ влево или вправо (кроме движения в вертикальной продольной плоскости рамы).
Конструктивно данное изобретение аналогично таким изобретениям как велосипед и мотоцикл. ТС включает раму, служащую для крепления других элементов. На раме крепятся заднее колесо (сзади) и рулевая колонка (спереди), в рулевой колонке крепится переднее колесо. Колёса служат опорами ТС, благодаря их вращению вокруг своих осей осуществляется движение ТС. Для поворотов ТС используется рулевая колонка. Водитель поворачивает руль руками, при этом наибольшая часть веса водителя приходится на раму. Отличительным признаком данного изобретения является механизм поступательного движения переднего колеса вдоль своей оси либо механизм поступательного движения рулевой колонки относительно рамы ТС (причём траектория этого движения не лежит в продольной вертикальной плоскости рамы).
Данное изобретение может использоваться без привода, то есть приводиться в движение отталкиванием водителя от земли. Также на данное изобретение может быть установлен привод на заднее колесо, например (но не ограничиваясь):
- цепная передача, приводимая в движение ногами через педали;
- цепная передача, приводимая в движение двигателем внутреннего сгорания;
- цепная передача, приводимая в движение электродвигателем.
Технический результат использования данного изобретения:
- возможность осуществления поворотов без контрруления (что позволяет быстрее покинуть траекторию движения, ведущую к аварии);
- возможность во время движения удержать ТС от заваливания в сторону без поворота руля в сторону заваливания (что позволяет избежать столкновения с расположенным сбоку другим ТС или избежать выезда за пределы дороги).
Задачи, на которые направлено изобретение и результаты его использования
Задача 1. Объезд препятствий в аварийных ситуациях.
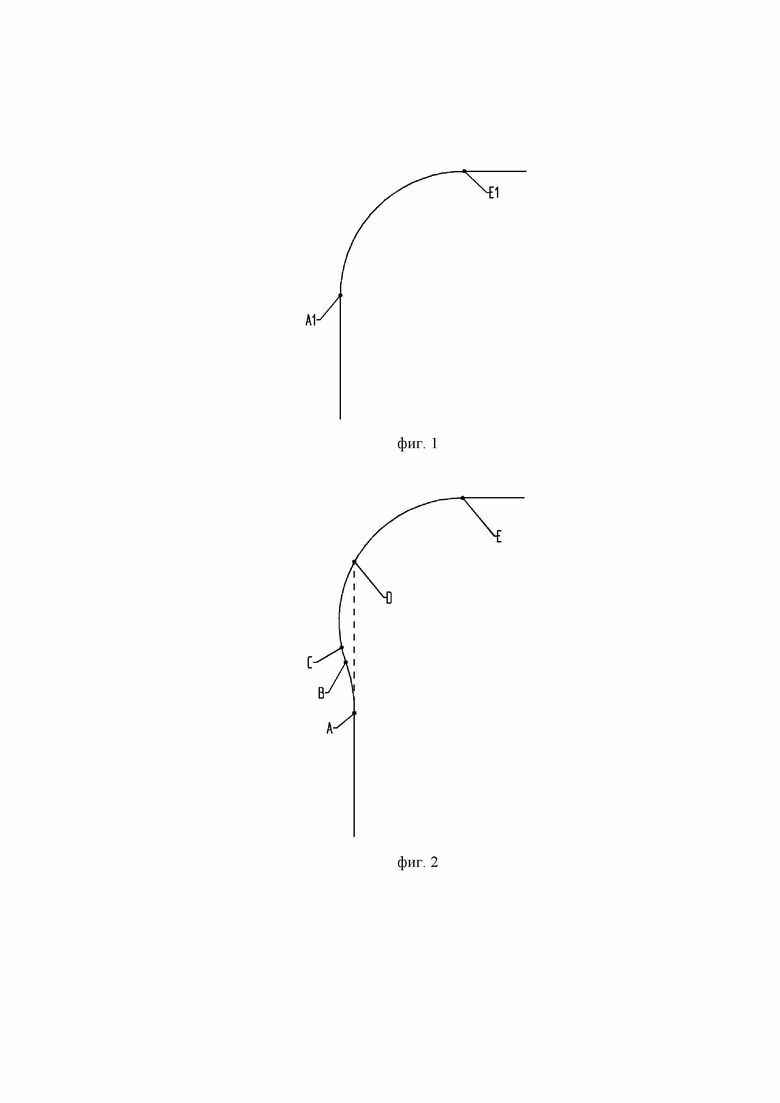
Наиболее частой и опасной причиной аварий с обычными двухколёсными мотоциклами является неожиданный выезд перед мотоциклом автомобиля. Рассмотрим, почему не удаётся объехать. На фиг. 1 показана желаемая траектория классического мотоцикла, на пути которого появилось препятствие. Пусть водитель решает свернуть вправо. В точке A1 водитель начинает поворот, а в точке E1 заканчивает.
Но дело в том, что для объезда препятствия, мотоцикл необходимо предварительно наклонить в сторону поворота, и только после этого можно сворачивать в нужную сторону. Это достигается путём контрруления.
Реальная траектория поворота показана на фиг. 2. В точке A водитель прибегает к контррулению, то есть намеренно поворачивает влево с целью наклонить мотоцикл вправо. После он поворачивает вправо. В точке B водитель уже выровнял руль и продолжает поворачивать вправо. В точке C мотоцикл достигает необходимого наклона вправо. В точке D мотоцикл пересекает первоначальную прямолинейную траекторию движения. В точке E мотоцикл заканчивает поворот. Проезжая путь от точки A до D, водитель рискует врезаться в препятствие, но избежать этого пути на классическом мотоцикле невозможно.
Данное изобретение позволяет придать импульс ЦМ вправо одновременно с началом поворота руля вправо. Смещение ЦМ относительно точек контакта колёс с дорогой вправо вызовет наклон ТС вправо.
Результат. Применение данного изобретения позволит водителю быстрее покинуть первоначальную траекторию движения, не прибегая к контррулению.
Задача 2. Удержание равновесия. Удержание ТС в пределах дороги.
Неудобство, с которым сталкиваются начинающие мотоциклисты – потеря устойчивости мотоцикла на малых скоростях, что особенно важно при проезде рядом со стоящими машинами. Пытаясь устранить сваливание мотоцикла в сторону, водитель интуитивно стремится выровнять вертикальное положение мотоцикла путём поворота руля в сторону сваливания. А это может привести к наезду на рядом находящийся автомобиль.
Результат. Применение данного изобретения позволяет водителю удержать равновесие и избежать заваливания транспортного средства без поворота руля. Также становится возможным удержать ТС от выезда с дороги на поворотном участке, даже если водитель не успел заранее снизить скорость и наклонить ТС в сторону поворота.
Краткое описание чертежей
На фиг. 1 показана желаемая траектория движения обычного мотоцикла или велосипеда при повороте направо (движение снизу вверх). В точке A1 водитель начинает поворот, в точке E1 заканчивает.
На фиг. 2 показана реальная траектория поворота обычного мотоцикла при повороте направо (движение снизу вверх). В точке A водитель прибегает к контррулению, то есть намеренно поворачивает влево с целью наклонить мотоцикл вправо. После он поворачивает вправо. В точке B водитель уже выровнял руль и продолжает поворачивать вправо. В точке C мотоцикл достигает необходимого наклона вправо. В точке D мотоцикл пересекает первоначальную прямолинейную траекторию движения. В точке E мотоцикл заканчивает поворот.
На фигурах 3..11 показаны три разных варианта данного изобретения. ТС изображены упрощённо, без сидений, тормозов и прочего возможного оборудования (например, цепной передачи или двигателя), с целью максимально доступно раскрыть изобретение.
На фиг. 3..5 показано ТС, имеющее сдвигаемую рулевую колонку (в пространстве рамы 1). К раме 1 крепится заднее колесо 2. Переднее колесо 3 крепится к рулевой колонке 4, вращающейся во втулке 5. Втулка 5 выполнена за одно целое с зубчатой рейкой, двигающейся по направляющим поверхностям кронштейна 7. Кронштейн 7 прикручен к раме 1, он оставляет одну степень свободы движения втулке 5 (при рассмотрении в пространстве рамы 1). На кронштейне 7 закреплён червячный мотор-редуктор 8 с зубчатым колесом, входящим в зацепление с зубчатой рейкой втулки 5. Таким образом, мотор-редуктор 8 вынуждает втулку 5 двигаться по направляющим кронштейна 7 влево или вправо (относительно вертикальной продольной плоскости рамы); включение и направления вращения мотор-редуктора 8 задаётся рукояткой 6. Направляющие поверхности деталей 5 и 7 задают прямолинейное движение, но, в общем случае, могут задавать круговое или иное поступательное движение.
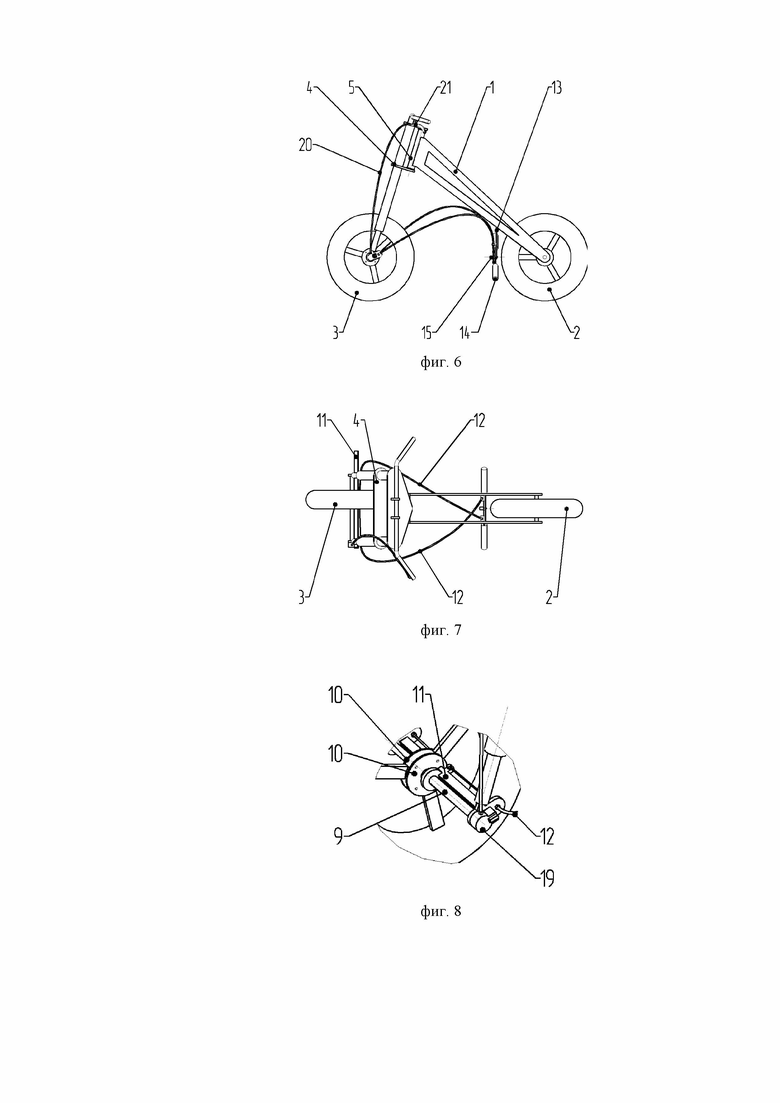
На фиг. 6..8 показано ТС, имеющее сдвигаемое переднее колесо (в пространстве рамы 1). Перья рулевой колонки 4 раздвинуты очень широко, а переднее колесо 3 может не только вращаться вокруг оси 9, но и скользить вдоль неё. Для этого с двух сторон ступицы колеса 3 закреплены фланцы 10, имеющие выступ, за который цепляются рейки 11. Рейки 11 могут скользить вдоль оси 9, не препятствую вращению фланцев 10. Сами рейки 11 приводятся в движение тросами 12. На кронштейне 13, закреплённом к раме 1, крепится рычаг 14, который может в некоторых пределах поворачиваться вокруг оси 15. Водитель ТС, надавливая то одной, то другой ногой на рычаг 14, вызывает натяжение одного из тросов 12, таким образом вызывая сдвиг колеса 3 вдоль оси 9 (в пространстве рамы 1). Тормозной суппорт 19 фиксирует рейку 11, а при нажатии на рукоятку 21, тормозной суппорт 19 через трос 20 освобождает рейку 11, делая возможным перемещение колеса 3 вдоль оси 9.
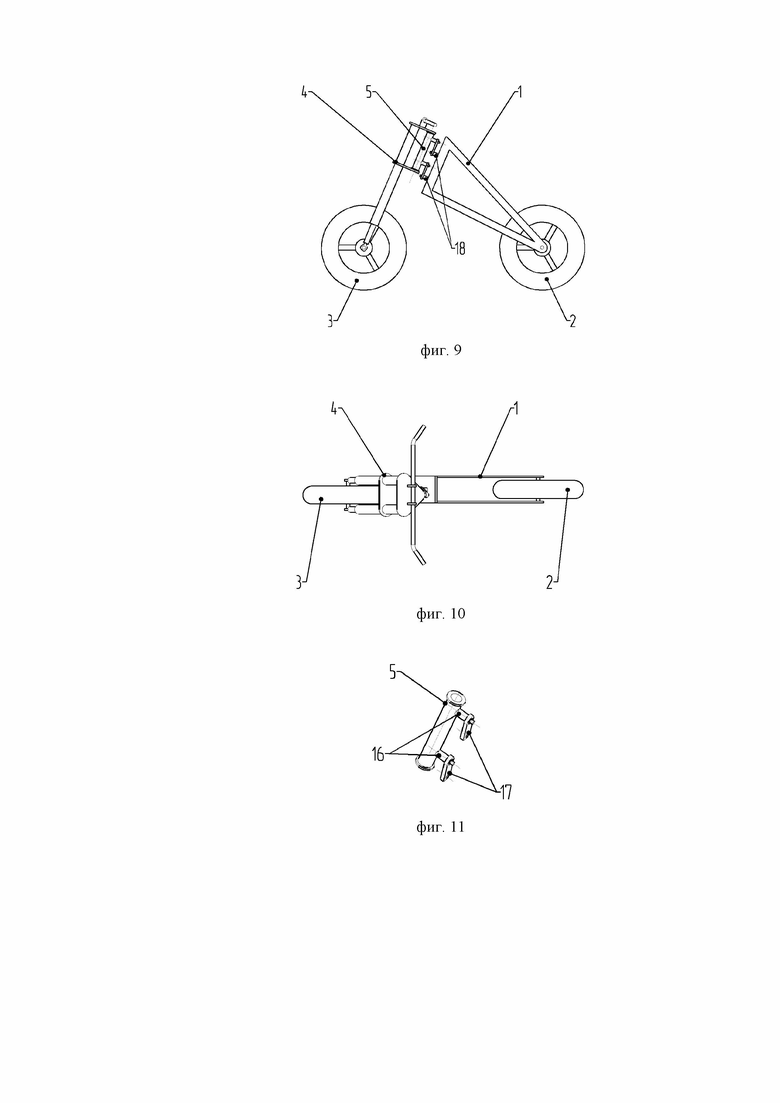
На фиг. 9..11 показано ТС, имеющее сдвигаемую рулевую колонку (в пространстве рамы 1). В отличие от варианта, показанного на фиг. 3..5, рулевая колонка 4 сдвигается мускульной силой водителя. Втулка 5 здесь имеет две оси 16. Такие же оси 16 с таким же межосевым расстоянием имеются на раме 1. Рама 1 и втулка 5 связаны кинематически пластинами 17, которые могут вращаться на осях 16. Таким образом, втулка 5 может поступательно двигаться в пространстве рамы 1.
Осуществление изобретения
Вариант №1 исполнения данного изобретения.
На фиг. 3..5 показано ТС, имеющее сдвигаемую рулевую колонку (в пространстве рамы 1). К раме 1 крепится заднее колесо 2. Переднее колесо 3 крепится к рулевой колонке 4, вращающейся во втулке 5. Втулка 5 выполнена за одно целое с зубчатой рейкой, двигающейся по направляющим поверхностям кронштейна 7. Кронштейн 7 прикручен к раме 1, он оставляет одну степень свободы движения втулке 5 (при рассмотрении в пространстве рамы 1). На кронштейне 7 закреплён червячный мотор-редуктор 8 с зубчатым колесом, входящим в зацепление с зубчатой рейкой втулки 5. Таким образом, мотор-редуктор 8 вынуждает втулку 5 двигаться по направляющим кронштейна 7 влево или вправо (относительно вертикальной продольной плоскости рамы); включение и направления вращения мотор-редуктора 8 задаётся рукояткой 6. В нейтральном положении рукоятки 6, мотор-редуктор 8 выключен, а благодаря его червячной передаче втулка 5 неподвижна относительно рамы 1. Направляющие поверхности деталей 5 и 7 задают прямолинейное относительное их движение, но, в общем случае, могут задавать круговое или иное поступательное движение.
Для упрощения на фиг. 3..5 не показано следующее оборудование: сидение, электропривод ТС с цепной передачей на заднее колесо, аккумулятор, тормозная система, некоторые органы управления.
Допустим, водитель ТС ехал прямо на большой скорости и перед внезапным препятствием хочет резко повернуть направо. Для этого ему надо наклонить ТС направо. Говоря точнее, водителю надо сместить вправо центр масс системы водитель-ТС относительно точек контакта колёс с дорогой. Для этого водитель поворачивает рукоятку 6 на себя, что вызывает смещение колеса 3 вместе с рулевой колонкой относительно рамы 1 влево (см. фиг. 4). Это придаст импульс ЦМ вправо, что и требовалось достичь. Одновременно с поворотом рукоятки 6, водитель поворачивает руль вправо. После этого водитель восстанавливает симметричное положение втулки 5 путём вращения рукоятки 6 от себя.
Вариант №2 исполнения данного изобретения.
Рассмотрим вариант реализации, показанный на фиг. 6..8. К раме 1 ТС крепится заднее колесо 2, втулка 5 и кронштейн 13. Рулевая колонка 4 вращается во втулке 5. Это напоминает компоновку обычного мотоцикла или велосипеда, но есть отличия: переднее колесо 3, вращающееся вокруг передней оси 9 рулевой колонки, может ещё скользить вдоль этой оси. Положение переднего колеса вдоль оси 9 определяется рейками 11. Рейки 11 могут двигаться вдоль оси 9; они входят в зацепление с фланцами 10, определяя положение этих фланцев вдоль оси 9, при этом не мешая вращению фланцев. Сами же фланцы 10 жёстко закреплены с обоих сторон колеса 3. Для управления положением колеса 3 вдоль оси 9 используется рычаг 14, качающийся на оси 15 кронштейна 13. При повороте рычага 14, натягивается один из тросов 12, приводя в движение рейку 11, а значит, и колесо 3 вдоль оси 9. Водитель ТС, давя на рычаг 14 то с одной, то с другой стороны, соответственно сдвигает колесо 3 относительно рулевой колонки 4 то в одну, то в другую сторону.
Для упрощения на фиг. 6..8 не показано следующее оборудование: сидение, двигатель внутреннего сгорания с коробкой переключения передач и цепной передачей на заднее колесо, топливный бак, тормозная система, некоторые органы управления.
Допустим, водитель ТС ехал прямо на большой скорости и перед внезапным препятствием хочет резко повернуть налево. Для этого ему надо наклонить ТС налево. Говоря точнее, водителю надо сместить влево центр масс системы водитель-ТС относительно точек контакта колёс с дорогой. Для этого водитель кратковременно надавливает на левую часть рычага 14, что вызывает смещение колеса 3 относительно рулевой колонки вправо (см. фиг. 7). Это придаст импульс ЦМ влево, что и требовалось достичь. Одновременно с надавливанием на рычаг 14, водитель поворачивает руль налево. После этого водитель восстанавливает симметричное положение колеса 3 на своей оси 9 путём надавливания на правую часть рычага.
Для того, чтобы переднее колесо 3 не смещалось произвольно вдоль оси 9, установлен тормозной суппорт 19. В нормальном положении этот суппорт фиксирует рейку 11, превращая данное ТС в классический мотоцикл. При нажатии на рукоятку 21, усилие через трос 20 передаётся на тормозной суппорт 19, который освобождает рейку 11, делая возможным перемещение колеса 3 вдоль оси 9.
Вариант №3 исполнения данного изобретения.
На фиг. 9..11 показано ТС, имеющее сдвигаемую рулевую колонку (в пространстве рамы). В отличие от варианта, показанного на фиг. 3..5, рулевая колонка 4 сдвигается мускульной силой водителя. Втулка 5 здесь имеет две параллельные оси 16. Параллельные им оси 18 с таким же межосевым расстоянием имеются на раме 1. Рама 1 и втулка 5 связаны кинематически пластинами 17, которые могут поворачиваться вокруг осей 16 и 18. Таким образом, втулка 5 может поступательно двигаться в пространстве рамы 1. В нормальном состоянии, при движении прямо, рулевая колонка 4 будет занимать симметричное положение относительно вертикальной продольной плоскости рамы 1, так как сила тяжести рамы и водителя будет стремиться задать пластинам 17 вертикальное положение.
Для упрощения на фиг. 9..11 не показано следующее оборудование: сидение, педальный привод с цепной передачей на заднее колесо, тормозная система, некоторые органы управления.
Допустим, водитель ТС хочет резко повернуть направо. Для этого ему надо наклонить ТС направо. Говоря точнее, водителю надо сместить вправо центр масс системы водитель-ТС относительно точек контакта колёс с дорогой. Для этого водитель усилием рук смещает рулевую колонку 4 влево, при этом надавливая на правую рукоятку вниз, а на левую - вверх (см. фиг. 10). Это придаст импульс ЦМ вправо, что и требовалось достичь.
Так как данное ТС лёгкое (не имеет двигателя), то водитель может рывком оторвать переднее колесо от дороги и сдвинуть рулевую колонку 4 влево в воздухе, без контакта с дорогой, что даст аналогичный результат.
Одновременно со сдвигом рулевой колонки влево, водитель поворачивает руль вправо. После поворота водитель восстанавливает симметричное положение втулки 5 (относительно вертикальной продольной плоскости рамы) усилием рук.
Вариант №4 исполнения данного изобретения.
Данный вариант не показан на фигурах. Он аналогичен варианту №3. Разница состоит в том, что здесь нет педального привода, цепной передачи и сиденья, рама имеет подножку как у самокатов, на которой стоит водитель, а отталкивается водитель от дороги непосредственно ногой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство принудительного наклона или предотвращения наклона двухколёсного транспортного средства с помощью маховиков | 2016 |
|
RU2629764C1 |
| Двухколёсное транспортное средство с колёсной формулой 2х2 | 2024 |
|
RU2837920C1 |
| МОТОЦИКЛ | 1997 |
|
RU2111144C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С УПРАВЛЕНИЕМ КРЕНОМ | 2003 |
|
RU2264306C2 |
| КВАДРОЦИКЛ С ПЛАТФОРМОЙ (ВАРИАНТЫ) | 2020 |
|
RU2749206C1 |
| МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2038252C1 |
| ОДНОКОЛЕЙНОЕ ДВУХКОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО С ПРИВОДОМ ОТ МУСКУЛЬНОЙ ЭНЕРГИИ | 1991 |
|
RU2036117C1 |
| Устройство управления поворотом колёс транспортного средства | 2023 |
|
RU2809854C1 |
| ДИНАМИЧЕСКИЙ МОТОТРЕНАЖЕР | 1973 |
|
SU382541A1 |
| САМОСТАБИЛИЗИРУЮЩЕЕСЯ, УПРАВЛЯЕМОЕ ПО НАПРАВЛЕНИЮ ТРАНСПОРТНОЕ СРЕДСТВО С ПО МЕНЬШЕЙ МЕРЕ ТРЕМЯ КОЛЕСАМИ | 1995 |
|
RU2156201C2 |

Группа изобретений относится к области машиностроения, в частности к двухколесным транспортным средствам. Двухколесное транспортное средство включает раму, заднее колесо, рулевую колонку, переднее колесо, закрепленное в этой колонке. ТС по первому варианту содержит механизм поступательного движения переднего колеса вдоль своей оси. Механизм позволяет смещать центр масс ТС вправо или влево относительно точек контакта колес с дорогой, не прибегая к повороту руля и/или изменению скорости ТС. ТС по второму варианту содержит механизм поступательного движения рулевой колонки относительно рамы ТС. Траектория этого движения не лежит в продольной вертикальной плоскости рамы, что позволяет смещать центр масс ТС вправо или влево относительно точек контакта колес с дорогой, не прибегая к повороту руля и/или изменению скорости ТС. Достигается уменьшение веса транспортного средства. 2 н. и 4 з.п. ф-лы, 11 ил. 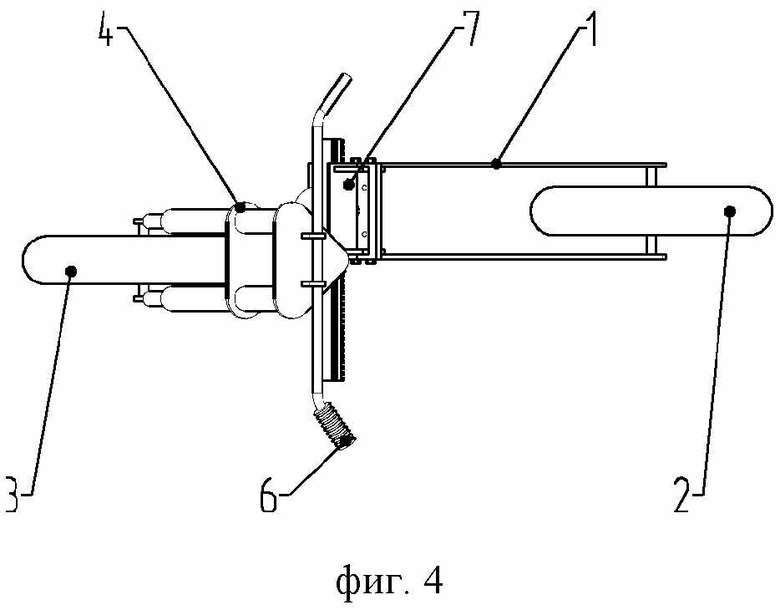
1. Двухколесное транспортное средство (ТС), включающее раму, заднее колесо, рулевую колонку, переднее колесо, закрепленное в этой колонке, отличающееся тем, что имеет механизм поступательного движения переднего колеса вдоль своей оси, что позволяет смещать центр масс ТС вправо или влево относительно точек контакта колес с дорогой, не прибегая к повороту руля и/или изменению скорости ТС.
2. ТС по п. 1, отличающееся тем, что включает педальный привод на заднее колесо.
3. ТС по п. 1, отличающееся тем, что включает механический двигатель с приводом на заднее колесо.
4. Двухколесное транспортное средство (ТС), включающее раму, заднее колесо, рулевую колонку, переднее колесо, закрепленное в этой колонке, отличающееся тем, что имеет механизм поступательного движения рулевой колонки относительно рамы ТС, причем траектория этого движения не лежит в продольной вертикальной плоскости рамы, что позволяет смещать центр масс ТС вправо или влево относительно точек контакта колес с дорогой, не прибегая к повороту руля и/или изменению скорости ТС.
5. ТС по п. 4, отличающееся тем, что включает педальный привод на заднее колесо.
6. ТС по п. 4, отличающееся тем, что включает механический двигатель с приводом на заднее колесо.
| Устройство принудительного наклона или предотвращения наклона двухколёсного транспортного средства с помощью маховиков | 2016 |
|
RU2629764C1 |
| US 20130233100 A1, 12.09.2013 | |||
| US 20140353062 A1, 04.12.2014. | |||

