Изобретение относится к самобалансирующему транспортному средству с по меньшей мере тремя колесами, опирающимися на грунт, причем по меньшей мере два из них расположены по обеим сторонам от центра тяжести относительно продольной оси транспортного средства, и по меньшей мере одно из этих колес управляется по направлению, в котором по меньшей мере одна секция транспортного средства может наклоняться вокруг продольной оси транспортного средства для осуществления и/или поддержания изменения в направлении управляемого по направлению колеса при движении, элемент управления для управления по меньшей мере одним управляемым по направлению колесом, и наклоняемый элемент с вспомогательным силовым приводом для наклона указанной наклоняемой секции вокруг продольной оси транспортного средства.
Четырехколесное транспортное средство с двигателем, имеющее заднюю часть, которая может наклоняться вокруг продольной оси относительно передней части, описано в Заявке EP-A-0592377. Для этой цели механическая трансмиссия соединяет ось передней рулевой секции, которой может быть руль, с наклоняемой секцией. Сервомеханизм гидравлического типа может управляться передней рулевой секцией. Два управляющих сервопривода действуют в противоположных направлениях благодаря сервораспределителю, подчиненному передней рулевой секции, для обеспечения наклона шасси в обоих направлениях. Известное транспортное средство имеет недостаток, заключающийся в том, что при заданном угловом положении рулевой секции ему придается фиксированный наклон. Невозможно приспособление к водителям, имеющим разный вес. Более того, не берутся в расчет скорости движения. Поворот рулевой секции на месте вызывает такой же наклон, как и при повороте рулевой секции при движении со сравнительно высокой скоростью.
Задачей настоящего изобретения является создание устройства управления, с которым наклон транспортного средства или секции транспортного средства в направлении внутрь кривой поворота достигается эффективно, так, что может обеспечиваться хорошая стабильность при всех режимах движения, в особенности при скоростях, которые выше скоростей, обычных при парковке транспортного средства или при выруливании с места парковки.
Для этой цели транспортное средство, согласно изобретению, отличается тем, что оно самобалансирующее и содержит датчик, соединенный с управляемым по направлению колесом для считывания значения и направления нагрузки, воздействующей на управляемое по направлению колесо для осуществления и/или поддержания изменения его направления в движении, причем датчик соединен с наклоняемым элементом для осуществления наклона как функции значения, считываемого датчиком.
Управляющая сила/управляющий момент рулевой секции рассчитывается, поскольку было обнаружено, что учет этих параметров нагрузки дает лучшие результаты. Сила/момент такого типа вырабатываются автоматически, когда управляемое по направлению колесо имеет определенный угол поворота, хотя угол наклона не соответствует скорости движения и радиусу поворота, предусматриваемым при повороте руля. Применяя это знание, угол наклона может управляться путем измерения указанной силы/момента. По сравнению, например, с известным применением датчиков ускорения, при применении настоящего изобретения были получены особенно естественные и постоянные характеристики движения, таким образом, транспортное средство может также управляться неопытными лицами.
Из EP-A-153521 известно устройство, названное корпусом транспортного средства, в котором гидравлический плунжер соединен с управляющим клапаном катушечного типа. Управляющий клапан приводится в действие рулевым механизмом, быстро инициируя наклонное движение при повороте рулевого механизма. Управляющий клапан также соединен с маятником, который наращивает наклонное движение до совпадения вертикальной оси транспортного средства с результирующим вектором силы тяжести и центростремительного ускорения.
Наклоняющее устройство такого типа относительно сложно, имеет существенное отставание в работе и может быть подвержено сбоям в результате препятствий качающемуся движению маятника.
Предпочтительно применение одновременно наклоняемого и управляемого по направлению колеса, при помощи чего может быть применено особенно простое устройство управления. С этим устройством весьма легко достигать равновесия при любом наклонном положении, поскольку в каждом положении равновесия для наклонного движения нагрузка при повороте руля будет равной нулю или практически равной нулю. Таким образом, при начале изгиба пути, в результате применения одновременно наклоняемого и управляемого по направлению колеса, нагрузка при повороте руля сначала будет максимальной, а потом будет постепенно уменьшаться при приближении наклонного положения равновесия, когда транспортное средство следует по необходимой кривой. Будет ясно, что путем придания необходимых размеров управляющему устройству время, проходящее между началом движения по кривой и достижением наклонного положения равновесия, может быть коротким, посредством чего могут быть достигнуты характеристики устройства, соответствующие угловым характеристикам современных мотоциклов.
Датчик положения может быть включен в схему управления с целью, например, получения скорости наклона, пропорциональной движению рулевого колеса. Например, скорость наклона тем ниже, чем больше отклонение относительно вертикали. Более того, при помощи таких средств изменение силы поворота управляемым колесом, которая пропорциональна движению рулевого колеса, может быть такой, что большая сила поворота управляемым колесом требуется для более крутых углов искривления пути. Кроме того, также возможна тем более высокая скорость возвращения наклона к вертикальному положению, чем больше наклон устройства относительно вертикального положения.
Предпочтительно, чтобы небольшая восстанавливающая сила постоянно воздействовала в наклонном положении равновесия так, чтобы момент или сила могла постоянно воздействовать на колесо управления. Если колесо управления отпустить, транспортное средство будет автоматически выходить в нейтральное положение для движения по прямой линии. Восстановление первоначального положения такого типа может достигаться, например, правильным положением соединительных элементов и действующих контактов и контактов короткого замыкания в соединении с, например, вращающимся компонентом, как будет более ясно видно из описания прилагаемых чертежей.
Работа системы управления, согласно изобретению, может зависеть от скорости так, что она будет полностью выключена, например, при парковке и выруливании с места парковки и/или при выполнении других маневров с низкой скоростью. Кроме того, устройства управления с силовым приводом сами по себе известны и управляются в зависимости от скорости и, что часто бывает обычным, могут размещаться между рулевым колесом и управляемым по направлению колесом.
Для того чтобы осуществлять наклонное движение, в особенности в случае когда одна секция транспортного средства поворачивается относительно секции транспортного средства, которая не изменяет положения, предпочтительно использовать один или более наборов приводных элементов, которые занимают ограниченное положение, в котором транспортное средство находится в нейтральном (вертикальном) положении. Нейтральное положение, таким образом, достигается легко, и приводные элементы для этой цели не требуют специальной регулировки. Наклон от нейтрального положения может затем осуществляться путем приведения в действие одного или другого приводного элемента. В этом контексте может применяться, например, комплект узлов цилиндр/поршень двойного действия, как описано и показано более подробно в следующем описании чертежей.
Наклон может также осуществляться, например, путем удлинения или укорочения подвески колеса, как описано, например, в Заявке GB-A-2-148217.
Изобретение применяется как для трехколесных, так и для многоколесных транспортных средств. В случае с трехколесным транспортным средством два задних колеса располагаются на некотором расстоянии друг от друга по обеим сторонам от центральной продольной оси и единственное переднее колесо может быть расположено на центральной продольной оси. В случае с многоколесными транспортными средствами два передних и два задних колеса могут иметь одинаковую или по существу одинаковую ширину колеи, как это бывает у обычных автомобилей.
Для успешной работы устройства даже с низкими скоростями движения предпочтительно, чтобы приводные колеса, расположенные на общем или практически общем радиусе изгиба поворота, имели разную вращательную скорость. В случае когда (задние) колеса приводятся централизованно от общего приводного двигателя, этого можно достичь при помощи дифференциала. В отдельных случаях действие дифференциала такого типа может временно блокироваться, необязательно постепенно, например в зависимости от скорости движения или величины преобладающей разницы углов поворота указанных приводных колес.
Другой задачей настоящего изобретения является достижение эффекта наклона в случае с транспортным средством, которое имеет по меньшей мере два управляемых по направлению колеса на одной или практически одной оси и которое имеет существенную ширину колеи, то есть промежуток между колесами, который заметно больше чем в несколько раз ширины покрышки, например в пять раз. Эта цель достигнута в соответствии с п. 14 прилагаемой формулы изобретения.
Описание чертежей относится к неограничивающим и иллюстративным вариантам воплощения изобретения, и ссылки делаются на прилагаемые чертежи.
На этих чертежах:
фиг. 1 схематически изображает перспективный вид трехколесного транспортного средства согласно настоящему изобретению;
фиг. 2a-2c изображают более подробно устройство наклона, применяемое в транспортном средстве, соответствующем фиг. 1;
фиг. 3a схематически изображает чертеж, показывающий принцип устройства гидравлического средства, которое может быть использовано в устройстве наклона, показанном на фиг. 2;
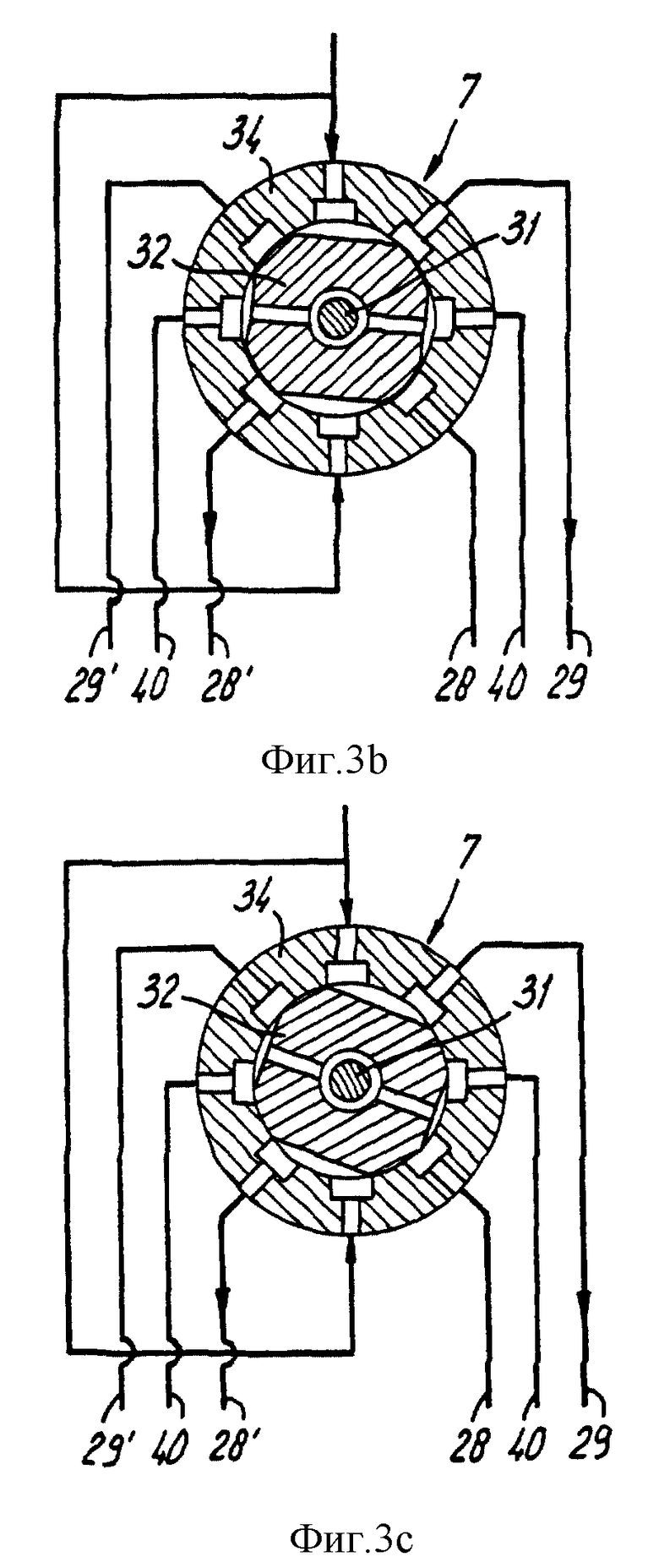
фиг. 3b изображает часть фиг. 3a в следующем положении;
фиг. 3c изображает часть фиг. 3a, показанную в еще одном следующем положении;
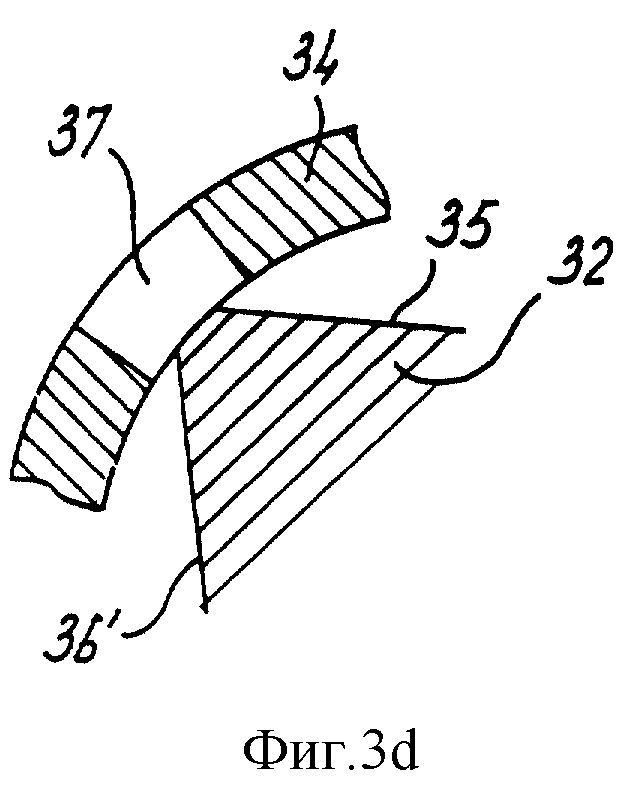
фиг. 3d изображает деталь альтернативного варианта выполнения варианта воплощения изобретения, показанного на фиг. 3b; и
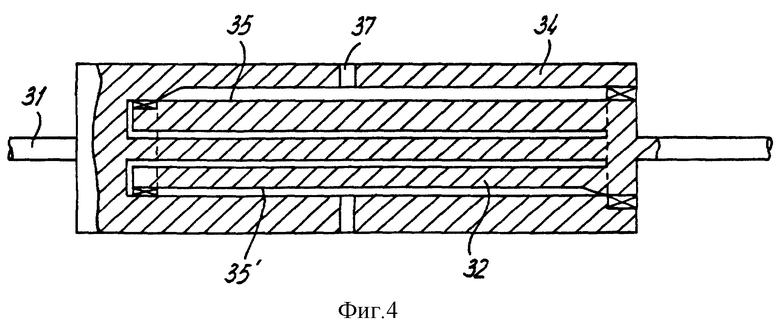
фиг. 4 изображает вид сбоку с частичным разрезом измерителя крутящего момента.
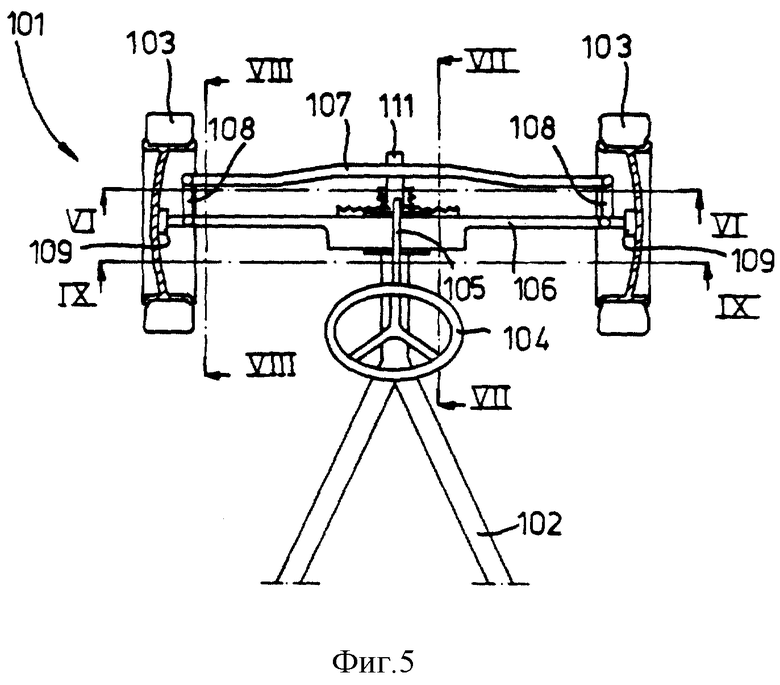
Фиг. 5 изображает схематический вид сверху, частично в разрезе, части транспортного средства, оснащенного устройством согласно изобретению;
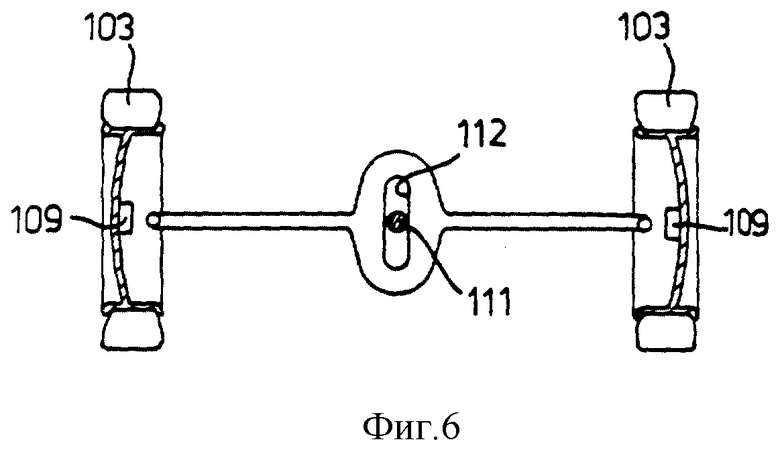
фиг. 6 изображает вид сечения по линии VI-VI на фиг. 1;
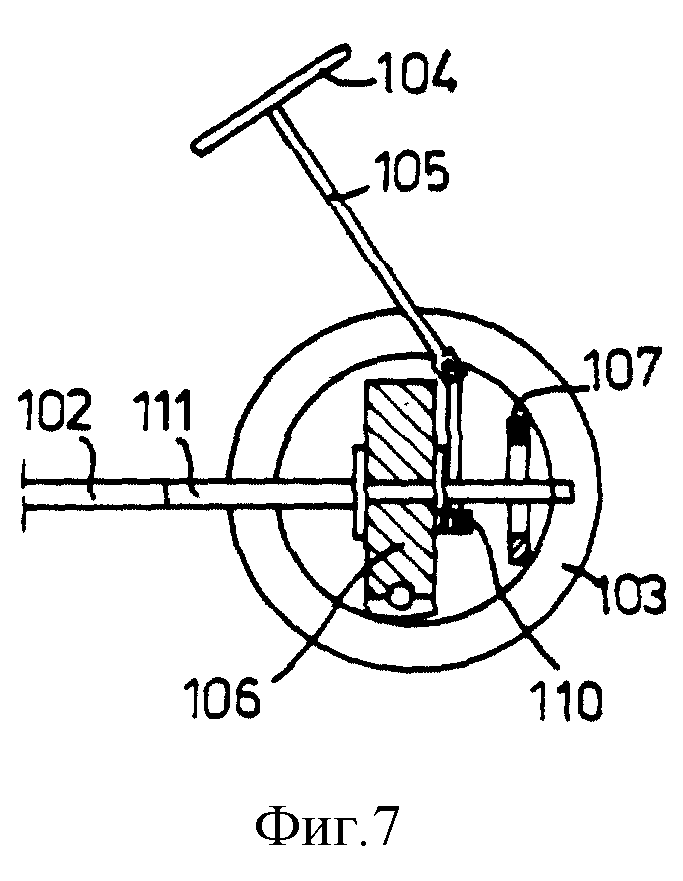
фиг. 7 изображает вид сечения по линии VII-VII на фиг. 1;
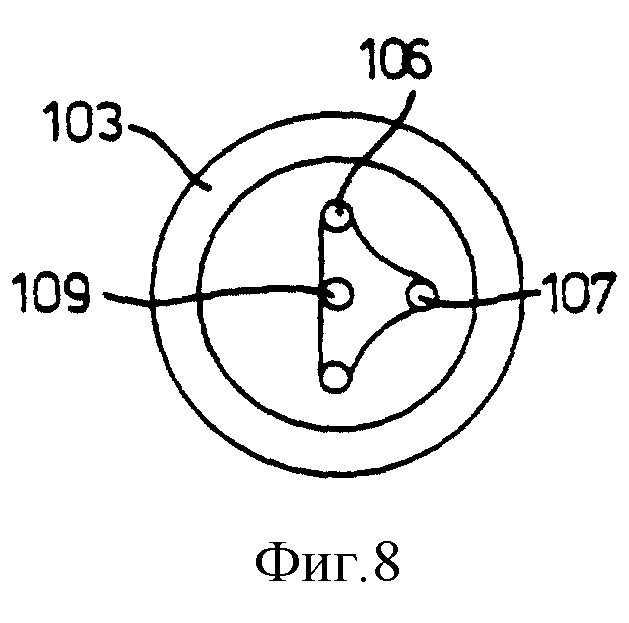
фиг. 8 изображает вид сечения по линии VIII-VIII на фиг. 1;
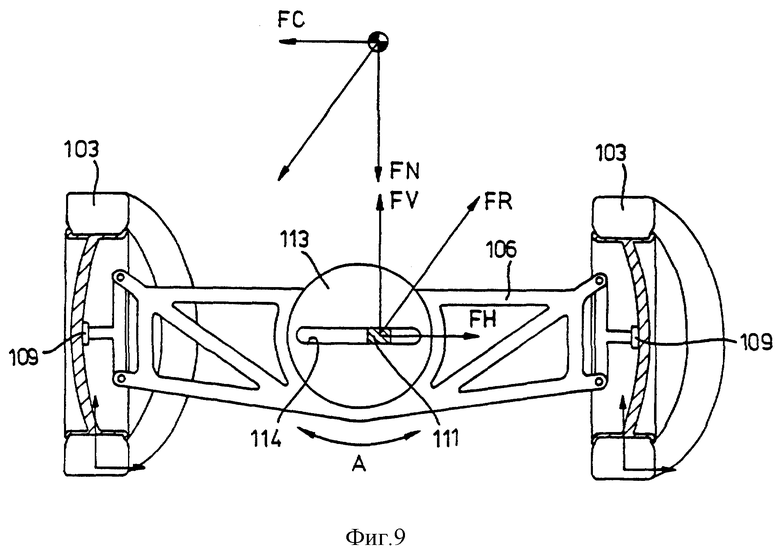
фиг. 9 изображает вид сечения по линии IX-IX на фиг. 1, когда транспортное средство находится в первом положении;
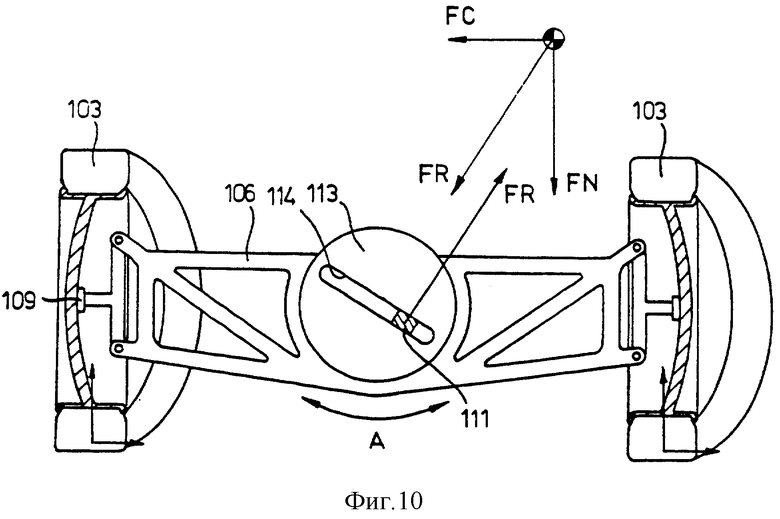
фиг. 10 изображает вид соответствующий фиг. 9, когда транспортное средство находится во втором положении;
фиг. 11 изображает вид сзади транспортного средства, показанного на фиг. 1, согласно еще одному альтернативному варианту воплощения изобретения;
фиг. 12 изображает схему гидравлического устройства, которое может применяться в альтернативном варианте, показанном на фиг. 11; и
фиг. 13 изображает деталь XIII на фиг. 12 в сечении.
На фиг. 1 схематично изображено трехколесное транспортное средство 1. Указанное транспортное средство имеет два задних колеса 2, которые расположены в осевом направлении на некотором расстоянии друг от друга по обе стороны от продольной оси транспортного средства 1. Также показано переднее колесо 3, расположенное в центре. Два задних колеса 2 приводятся двигателем. Силовой установкой 4 является обычный двигатель внутреннего сгорания, расположенный между задними колесами 2, и его расположение схематически показано на фиг. 2. Как показано на фиг. 1, переднее колесо 3 крепится к секции 9 при помощи передней вилки 5, которая вращается вокруг оси 11, находящейся в вертикальной плоскости. Передняя вилка 5 направлена так, что по направлению движения ось 11 достигает грунта в точке 43, расположенной впереди точки контакта 42 колеса 3 с грунтом. Соединение смонтировано между рулевым колесом 6 и передней вилкой 5. Указанное соединение включает измеритель момента поворота руля или измеритель силы поворота руля 7. Рулевое колесо 6 может соединяться непосредственно с передней вилкой 5, как, например, у обычного велосипеда. Необязательно соединение может осуществляться через передающие средства, например рулевые тяги, тросы управления или тому подобные (не показаны). Соединение также может быть выполнено в гидравлическом или электрическом варианте и т.д. Тип измерителя 7 зависит от выбранного соединения. Например, указанный измеритель момента поворота руля 7 устроен так, как показано более подробно на фиг. 3. Водитель может сидеть за рулевым колесом 6 на сидении 8. Кроме того, транспортное средство 1, показанное на фиг. 1, состоит из двух секций: передней секции 9 и задней секции 10, которые сконструированы так, что они могут наклоняться относительно друг друга вокруг продольной оси транспортного средства 1. Переднее колесо 3, передняя вилка 5, рулевое колесо 6, измеритель момента поворота руля 7 и сидение 8 расположены в передней секции 9. Два задних колеса 2 и двигатель 4 расположены в задней секции 10. Два задних колеса 2 приводным способом соединены через обычный дифференциал друг с другом и с двигателем 4. В другом варианте воплощения изобретения двигатель может быть смонтирован в наклонной части 9. Переднее колесо 3 может соединяться с остальной частью транспортного средства 1 так, что образуется так называемое рулевое управление со ступицей.
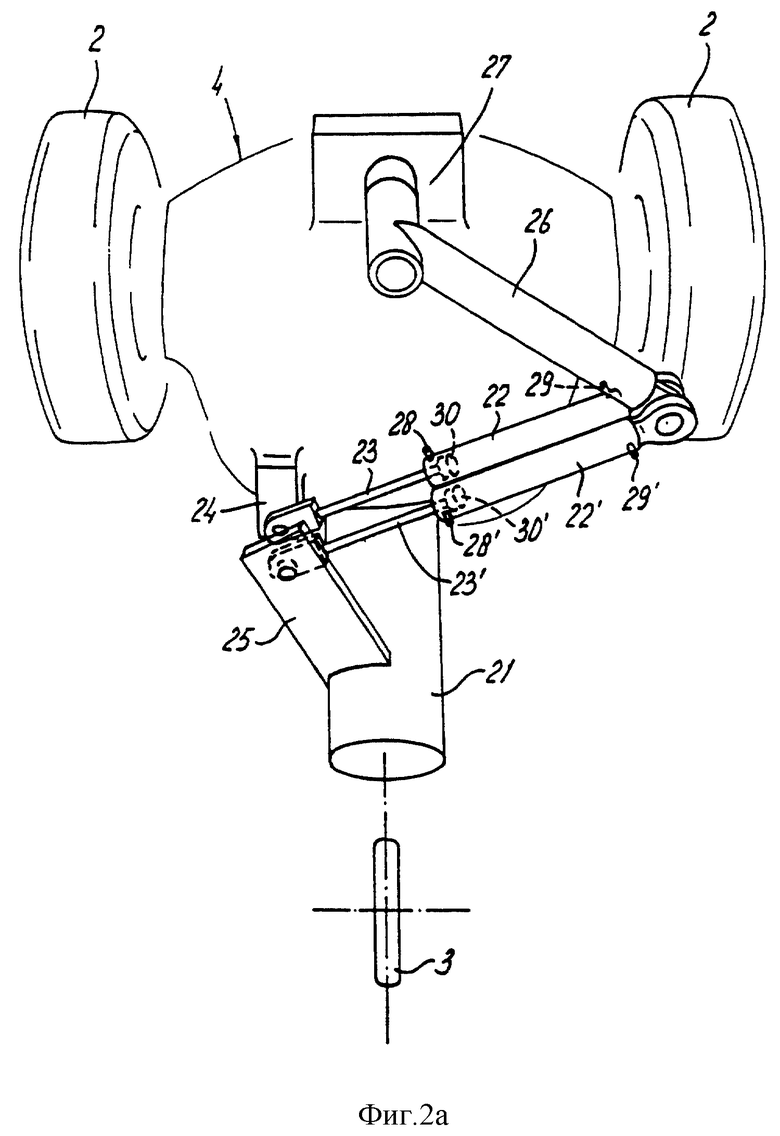
Как показано более подробно на фиг. 2, наклоняющая труба 21, которая отступает назад от передней секции 9, проходит вдоль нижней стороны передней секции 9. Такая наклоняющая труба не вызывает необходимости проводить ее горизонтально. Центральная линия указанной наклоняющей трубы 21 представляет собой центральную продольную ось транспортного средства 1. Указанная наклоняющая труба 21 помещена так, что она может вращаться вокруг центральной линии транспортного средства в подшипниковой втулке (не показана) двигателя 4 в задней секции 10 транспортного средства 1. При помощи указанной вращающейся подшипниковой втулки наклоняющей трубы 21 передняя секция 9 может наклоняться влево и вправо вокруг центральной продольной оси транспортного средства 1, в то время как задняя секция 10 остается в неизменном положении. При наклоне передней секции 9 переднее колесо 3 будет наклоняться одновременно с ней в аналогичном направлении.
Для определения степени наклона, согласно изобретению, измеряются движение рулевого колеса, или сила поворота руля, или момент поворота руля, как описано более подробно и более конкретно со ссылками на фиг. 3. Собственно наклон может достигаться при помощи наклоняющего устройства, которое показано в деталях на фиг. 2. На ней показаны две комбинации двойного действия поршень/цилиндр 22, 22'. Свободный конец штока поршня 23 соединен с возможностью качания с крепежным выступом 24 двигателя 4. Свободный конец штока поршня 23' соединен с возможностью качания на некотором расстоянии от центральной оси наклоняющей трубы 21 с крепежным выступом 25, отступающим от наклоняющей трубы 21. На противоположном конце комбинации поршень/цилиндр 22, 22' соединены с возможностью качания друг с другом и с соединительным стержнем 26, другой конец которого соединен с возможностью качания с другим крепежным выступом 27 на секции 10 или секции 9; здесь указанный выступ 27 находится на двигателе 4.
Кроме того, цифрами 28, 28' и 29, 29' обозначены соединительные отверстия цилиндров комбинаций цилиндр/поршень 22 и 22', соответственно, для подсоединения к гидравлическому контуру, как, например, описано и показано более конкретно на фиг. 3. Отверстие 28 соединено непосредственно с отверстием 29'. Отверстие 28' соединено непосредственно с отверстием 29. Следовательно, между измерителем момента 7 и комбинациями цилиндр/поршень 22, 22' проходит не более двух линий. Однако отверстия 28, 28', 29, 29' не обязательно должны быть соединены как показано, и более чем две линии могут быть проведены между измерителем момента 7 и комбинациями цилиндр/поршень 22, 22'. Если давление в отверстии 28 выше, чем давление в отверстии 29, транспортное средство 1 будет наклоняться направо. Наклон влево будет происходить в обратной ситуации. Положение поршня 30, 30' показано прерывистой линией на фиг. 2 в каждом случае.
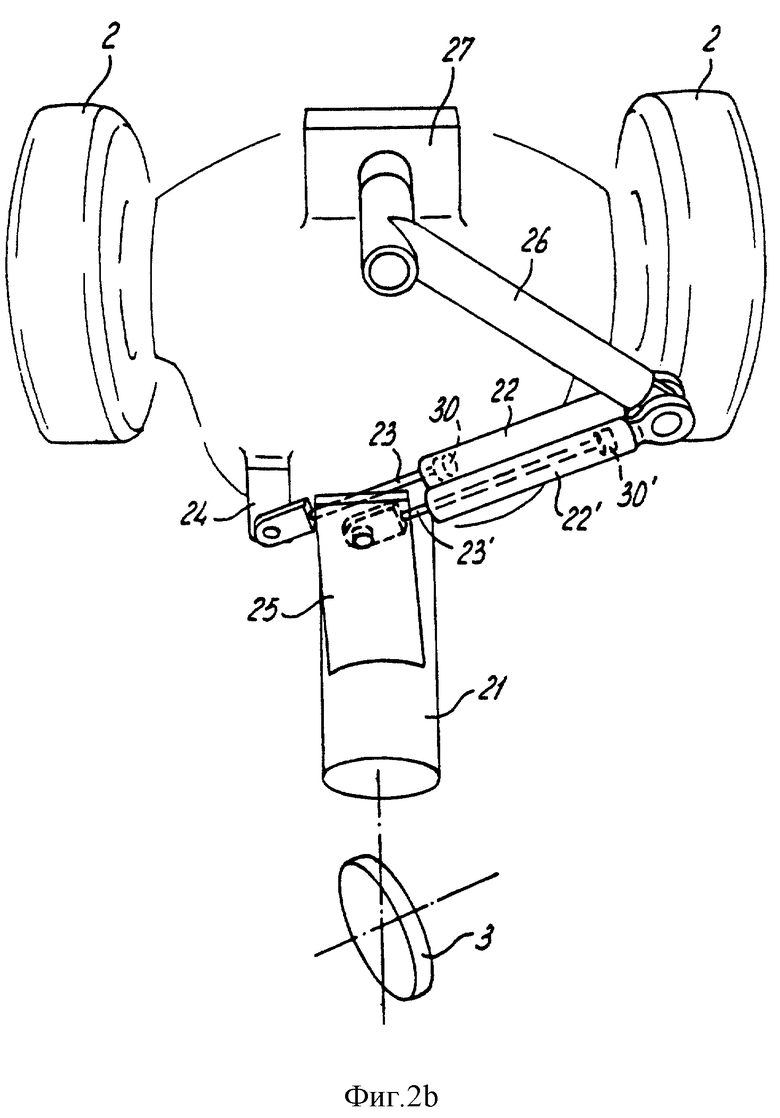
При езде по прямой (фиг. 2а) два штока поршня 23, 23' находятся в максимально выдвинутом положении и оба поршня 30, 30' находятся в контакте с соответствующими стопорами (не показаны), которые определяют максимальное положение конца хода поршня. В указанном положении передняя секция 9 транспортного средства 1 находится в нейтральном положении, то есть указанная секция расположена вертикально и переднее колесо 3 также расположено вертикально и выровнено с положением для движения по прямой, то есть параллельно центральной продольной оси транспортного средства 1, и, таким образом, параллельно центральной оси наклоняющей трубы 21. Это положение может устанавливаться надежно и эффективно, поскольку в указанном положении два поршня 30, 30' находятся в полностью выдвинутом состоянии. На фиг. 2b показана ситуация, когда произведен наклон вправо. В этом случае поршень 30' комбинации 22' цилиндр/поршень движется, в то время как поршень 30, предпочтительно, остается на месте. Переднее колесо 3, соответственно, поворачивается вправо вокруг оси 11. Одновременно переднее колесо 3 наклоняется вправо вместе с секцией 9. На фиг. 2b поршень 30' показан в полностью задвинутом положении. Это соответствует положению максимального наклона направо. Будет ясно, что поршнем 30' также могут заниматься промежуточные положения, соответствующие промежуточным наклонным положениям.
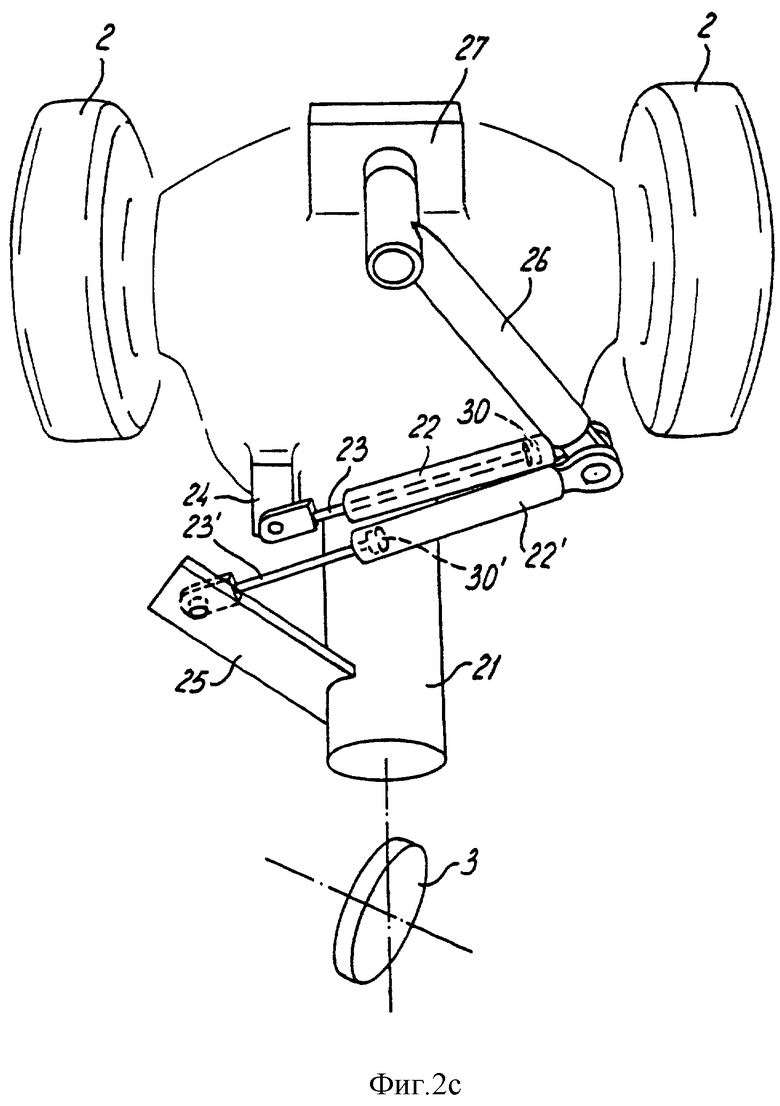
На фиг. 2c показана ситуация, когда передняя секция 9 наклонена в другую сторону, то есть налево на чертеже. Поршень 30 теперь движется от полностью выдвинутого положения, показанного на фиг. 2a, тогда как поршень 30', предпочтительно, остается в неизменном положении. Вновь переднее колесо 3 поворачивается соответственно, то есть влево.
Нейтральное положение, показанное на фиг. 2a, принимается автоматически от наклонного положения, если, например, максимальное гидравлическое давление воздействует на каждый из поршней 30, 30'. В таком случае поршни 30, 30' автоматически приводятся в полностью выдвинутое положение, показанное на фиг. 2a, благодаря преобладающей разности в площади поверхности на каждой стороне каждого поршня в результате наличия штоков поршней 23 и 23', соответственно. Путем уравновешивания разницы давлений на поршни 30, 30' через отверстия 28, 29 и, соответственно, 28', 29' может обеспечиваться соответствующее движение поршней 30 или 30' в зависимости от направления и значения силы поворота руля или момента поворота руля и/или движения рулевого колеса, и/или углового вращения переднего колеса 3 вокруг оси 11.
Конечно, также могут применяться наклоняющие устройства, отличающиеся от изображенного на фиг. 2. Например, узлы 22, 22' цилиндр/поршень могут замещаться одним или более линейными двигателями другого типа, такого как, например, двигателем электрического или магнитного действия. Также возможно, например, выбрать применение вращающегося приводного элемента, который может, например, включаться в наклоняющую трубу 21. Пневматический принцип действия, например, также может применяться вместо гидравлического принципа действия. Комплект комбинаций 22, 22' цилиндр/поршень может также заменяться одной комбинацией цилиндр/поршень, поршень 30 которой занимает центральное положение между двумя конечными точками хода поршня, когда передняя секция 9 находится в нейтральном, то есть не наклонном положении. Однако для точного и надежного получения нейтрального (для движения по прямой линии) положения предпочтителен альтернативный вариант воплощения изобретения, изображенный на фиг. 2.
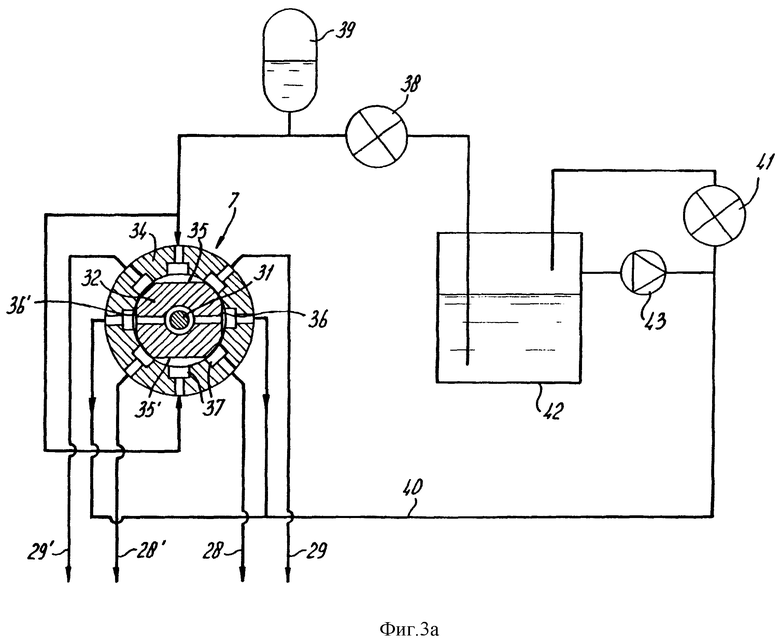
Гидравлическое управление, которое в особенности преимущественно в отношении альтернативного варианта, показанного на фиг. 2, теперь будет описано более подробно со ссылками на фиг. 3 и 4. На фиг. 4 показан узел, включающий измеритель 7 момента поворота руля и рулевую тягу 31. Измеритель 7 момента поворота руля содержит цилиндрический корпус 34, который одним концом соединен с рулевой тягой 31 так, что он не может вращаться. Рулевой ползун 32 помещен в указанный корпус 34. На свободном конце корпуса 34 указанный рулевой ползун 32 соединен с рулевой тягой 31 так, что он не может вращаться, и окружает рулевую тягу 31 с зазором между ними. Наружная окружность рулевого ползуна имеет серию плоскостей 35, 35', 36, 36', что более ясно можно видеть на фиг. 3. Если на рулевую тягу 31 воздействует момент, указанная рулевая тяга поворачивается, в результате чего корпус 34 будет поворачиваться относительно рулевого ползуна 32. На фиг. 3 в сечении показан измеритель рулевого момента 7, встроенный в гидравлическое устройство, показанное схематически. На цилиндрической периферической поверхности рулевой ползун 32 имеет два комплекта диаметрально противоположных плоскостей, причем плоскости 35, 35' шире плоскостей 36, 36'. Восемь отверстий 37, выполненных в корпусе 34, открыты в полость корпуса и, как видно в сечении корпуса 34, они распределены под одинаковыми углами по всей окружности. Как показано на чертеже, верхнее и нижнее отверстия 37 сообщаются с нагнетательным насосом 38 и накопителем давления 39. В показанном варианте воплощения изобретения корпус 34 и рулевой ползун 32 в сечении симметричны. Асимметричный вариант также возможен, и в этом случае накопитель соединяется с корпусом 34 только в одной точке и отверстия 28, 29' и, соответственно, 28', 29 соединяются с корпусом 34 общей линией.
Оба отверстия 37, расположенные в горизонтальной средней плоскости на чертежах, соединены с выпускным средством 40, которое (необязательно) через шестеренчатый насос 41 сообщается с накопительной емкостью 42. Преобладающее давление в указанной накопительной емкости 42 для жидкости ниже, чем преобладающее давление в накопителе давления 39. Шестеренчатый насос 41, которым можно пренебречь, вращается со скоростью, пропорциональной скорости транспортного средства. Чем быстрее вращается шестеренчатый насос 41, тем ниже будет противодавление, с которым шестеренчатый насос воздействует на жидкость, протекающую из корпуса 34 по линии 40. При медленном вращении шестеренчатого насоса 41 жидкость будет испытывать большее сопротивление, в результате чего действие наклоняющего устройства будет соответственно задерживаться. Это дает преимущество, например, при движении к месту парковки и от него, которое связано с большими значениями поворота рулевого колеса или большими рулевыми моментами/рулевыми силами, когда наклон секции 9 транспортного средства нежелателен и даже вызывает неудобство. Для ограничения действия наклоняющего устройства при движении с относительно низкими скоростями может также быть выбрано вместо шестеренчатого насоса 41 другое средство. Например, вместо шестеренчатого насоса 41 может быть выбран управляемый скоростью отсечной клапан, который при уменьшении скорости закрывается в нарастающей степени.
Другие отверстия 37, показанные на чертежах, соединены с соответствующими отверстиями в комбинациях цилиндр/поршень 22 и 22' соответственно (см. фиг. 2).
Если применяется шестеренчатый насос 41, предпочтительно включить в конструкцию обратный клапан 43, как показано, для предотвращения возрастания давления и/или образования вакуума в насосе и в контуре вследствие действия шестеренчатого насоса 41.
Гидравлическое устройство, показанное на фиг. 3, действует следующим образом:
На фиг. 3а показано нейтральное положение рулевого ползуна 32, находящегося внутри корпуса 34, которое соответствует положению транспортного средства 1 при движении по прямой линии. Можно ясно видеть, что плоские части соединительного паза 35 рулевого ползуна 32 достаточно велики, чтобы обеспечивать сообщение отверстий 28, 28' и 29, 29' с накопителем давления 39. Следовательно, на стороны обоих поршней 30, 30' (фиг. 2) воздействует одинаковое преобладающее давление, и, таким образом, они находятся в полностью выдвинутом положении, показанном на фиг. 2. Плоскости 36, 36' имеют такую небольшую величину, что в нейтральном положении рулевого ползуна 32 они сообщаются только с выпускной линией 40. Указанная выпускная линия 40 не соединяется через измеритель управляющего момента 7 с накопителем давления 39.
Когда рулевой ползун 32 слегка поворачивается (например, направо, как показано на фиг. 3b), соединение между отверстиями 28, 28', 29, 29' с накопителем 39 сохраняется. Однако жидкость теперь может поступать также в отверстия соединительного паза 36, 36' и, таким образом, в линию 40. Положение рулевого ползуна 32 относительно корпуса 34 в этой ситуации показано более подробно на фиг. 3d. Следовательно, в этом положении происходит "утечка" жидкости из накопителя 39 в линию 40. Следовательно, потеря давления возрастает в пределах, которые зависят от степени, в которой может вытекать жидкость. При помощи этого возможно надежное управление скоростью наклона. При дальнейшем повороте вправо (фиг. 3c) отверстия 28 и 29 отсоединяются от накопителя давления 39. Теперь они сообщаются только с линией 40 и, соответственно, в указанных линиях возрастает потеря давления, в результате чего поршни начнут движение. При этом происходит наклон транспортного средства 1. Следовательно, разница давлений на поршень 30 и поршень 30' будет достаточно большой для движения от положения, показанного на фиг. 2a, в направлении положения, показанного на фиг. 2c и 2b соответственно. Пока поршень 30 или поршень 30' движется, рулевой ползун 32 будет медленно вращаться назад, в положение, показанное на фиг. 3b, пока необходимая управляющая сила или управляющий момент или необходимое движение рулевого колеса автоматически не уменьшится в результате увеличения наклона транспортного средства. Как только будет достигнуто наклонное положение равновесия, что связано с преобладающими условиями для продолжения наклона, будет преобладать ситуация, показанная на фиг. 3b, в которой малая управляющая сила или движение рулевого колеса все еще должно обеспечиваться рулевым колесом 6. Как только рулевое колесо 6 будет повернуто в противоположном направлении или отпущено, рулевой ползун 32 займет положение, показанное на фиг. 3a, или будет повернут за эту точку в противоположном направлении так, что поршни 30, 30' (фиг. 2) возвратятся в первоначальное положение, как показано на фиг. 2a.
Конечно, для осуществления изобретения также могут применяться варианты, отличающиеся от показанных и описанных здесь. Например, обычный рулевой механизм с силовым приводом также может встраиваться между рулевым колесом 6 и передним колесом 3 для образования части управляющей силы, требуемой для управления транспортным средством, особенно с низкими скоростями движения. Указанный механизм может, например, соединяться с тем же накопителем давления 39, нагнетательным насосом 38 и накопительной емкостью 42 для жидкости, как показано на фиг. 3a. Кроме того, может также применяться другой вариант измерителя управляющего момента, отличающийся от варианта, показанного на фиг. 3. Кроме того, также, например, можно снабдить транспортное средство более чем одним управляемым по направлению колесом, которое движется вместе с наклоняемой секцией транспортного средства. Измеритель момента управления 7, показанный на фиг. 3, может также применяться для электронного управления. Для этой цели плоские части 35, 35' и 36, 36' могут выполняться в качестве скользящих контактов, и положения отверстий 37 определяют различные точки электрических контактов с источником электроэнергии, заземлением и точки соединения с одним или более линейных двигателей. Вместо измерения момента измеритель 7 может также предназначаться для измерения силы. Может использоваться преобладающая нормальная сила между рулевым колесом и передней вилкой. Указанная сила прямо пропорциональна прилагаемому моменту управления. Отсечной клапан, который может скользить в продольном направлении относительно рулевой тяги, может помещаться в корпус, снабженный отверстиями, при этом отсечной клапан управляет открыванием и перекрытием отверстий в качестве функции прилагаемой управляющей силы. Отсечной клапан может удерживаться в нейтральном положении при помощи, например, пружин. На основании фиг. 3 специалист в данной области техники легко сможет создать управляемый электронным способом измеритель управляющего момента такого типа, опираясь на свои знания. Однако предпочтительно получить гидравлическое устройство, обладающее большей надежностью. Такой уровень надежности важен, в частности, для автомобилей.
На фиг. 5 изображена часть транспортного средства 101. На фиг. изображена центральная рама 102, к которой крепится кузов (не показан), сидения, педали управления и другие средства, монтаж которых подробно не показан. Рама 102 перемещается на колесах. Только два передних колеса 103 показаны на фиг. 5. Эти колеса (необязательно) могут быть задними колесами. Специалисту в данной области техники будет понятно, что транспортное средство 101 также подвешено на одном или более приводных задних колес, которые на фиг. 5 не показаны. Указанным одним или более колес может быть единственное, например, расположенное по центру, колесо или два колеса с шириной колеи, которая, например, сравнима с шириной колеи передних колес 103. Транспортное средство 101 может быть двухосным или многоосным. Передние колеса 103, как показано, установлены на одной оси. Когда два колеса расположены относительно близко рядом друг с другом на одной или по существу на одной оси (например, с промежутком между ними, который не больше, чем несколько размеров ширины колеса), такие колеса не могут рассматриваться в рамках настоящего изобретения как одно колесо. Фактически, количество колес не имеет значения, если транспортное средство удерживается этими колесами в равновесии. Это означает, что транспортное средство должно быть по меньшей мере так называемым трехколесным транспортным средством.
На фиг. 5 также изображено рулевое колесо 104, вращающееся вокруг рулевой колонки 105. Датчик управляющей силы (не показан) или датчик движения рулевого колеса (не показан) может устанавливаться на рулевой колонке 105 или в любом другом пригодном месте. Датчик может быть типа, описанного относительно фиг. 4. Данные, выдаваемые таким датчиком, используются для контроля степени наклона транспортного средства внутрь окружности поворота. Данные от указанного датчика передаются к так называемому устройству наклона транспортного средства (не показано), при помощи которого наклоняемая секция транспортного средства наклоняется с силовым содействием (в нужном направлении и в необходимых пределах) относительно ненаклоняемой секции. Например, устройство наклона транспортного средства имеет одну или более гидравлических или пневматических комбинаций поршень/цилиндр или другие приводные элементы, которые могут удлиняться и укорачиваться, или вращающиеся приводные элементы для достижения управляемого наклона с силовым содействием двух секций относительно друг друга. Наклоняющие устройства могут быть такого типа, который показан на фиг. 2. На конце рулевой колонки 105, удаленном от рулевого колеса 104, находится широко распространенная трансмиссия для бокового движения задней рулевой тяги 106. Применяется также передняя рулевая тяга 107, которая соединена обычным способом при помощи шарнирных соединений 108 со ступицей 109 каждого колеса 103. Совокупность рулевых тяг 106 и 107 и соединений 108 образует средство для управления колесами 103, которое обычно для автомобилей. На фиг. 7 показано более подробно, как рулевая колонка 105 соединяется при помощи рулевой трансмиссии 110 с задней рулевой тягой 106. В этом конкретном случае выбрана обычная реечная трансмиссия. Как можно видеть, в частности на фиг. 5, рама 102 поддерживается относительно рулевых тяг 106, 107 при помощи балки 111. Как можно видеть, в частности на фиг. 7, указанная балка 111 проходит через заднюю рулевую тягу 106 и через переднюю рулевую тягу 107. Для этого передняя рулевая тяга 107 имеет вертикальный паз 112. Как можно видеть на фиг. 9 и 10, задняя рулевая тяга 106 снабжена вращающимся элементом 113, который вращается вокруг продольной оси, параллельной продольной оси транспортного средства (то есть соответственно двойной
стрелке А, лежащей в плоскости чертежа на фиг. 9 и 10). Паз 114 выполнен в указанном вращающемся элементе 113, и в этот паз заключена балка 111 с возможностью скольжения. Как показано на фиг. 6, балка 111 имеет круглое поперечное сечение в том месте, где указанная балка проходит через паз 112. Как можно видеть на фиг. 9 и 10, балка 111 имеет прямоугольное сечение в том месте, где указанная балка проходит через паз 114. Балка 111, таким образом, может вращаться вокруг ее продольной оси относительно паза 112, но не может вращаться вокруг указанной продольной оси относительно вращающегося элемента 113. Когда транспортное средство движется по прямой линии (фиг. 9), паз 114 будет горизонтальным. При движении по изогнутой линии (изогнутой вправо, как показано на фиг. 10), паз 114 займет наклонное положение. При движении по прямой линии балка 111 в целом центруется относительно оси вращения вращающегося элемента 113. Балка 111 удерживается по центру при помощи придания пригодного угла наклона колеса 103 относительно, например, передней рулевой тяги 107. При повороте рулевого колеса 104 (направо на фиг. 9) задняя рулевая тяга будет перемещаться налево на фиг. так, что балка 111 соответственно перемещается направо от ее центрального положения. Наклон направо произведен. Горизонтальная сила FH должна образовываться рулевым колесом 104 для получения необходимого смещения задней рулевой тяги 106 влево. Это требует воздействия момента на рулевое колесо 104, значение и направление которого может измеряться датчиком управляющей силы (не показан), который уже описан выше и который, например, установлен на рулевой колонке 105. Горизонтальная сила FH вместе с вертикальной силой FV (сила противодействия силе тяжести) определяет результирующую силу FR, которая первоначально направлена под углом к продольному направлению паза 114. Устройство наклона транспортного средства (не показано) управляется при помощи сигналов от датчика управляющей силы для осуществления наклона наклоняемой секции 102 транспортного средства 101 вправо вокруг продольной оси. Следовательно, вращающийся элемент 113 будет поворачиваться вокруг своей оси; при повороте руля направо он будет поворачиваться до достижения положения равновесия, показанного на фиг. 10. В результате указанного наклона результирующая FR будет нарастать до положения, перпендикулярного относительно продольного направления паза 114, в результате чего необходимая управляющая сила, которая должна прилагаться к рулевому колесу 104, уменьшается с таким же темпом до нуля, когда достигается наклонное положение равновесия, датчик управляющей силы отслеживает с тем же темпом непрерывно уменьшающуюся управляющую силу, воздействующую на рулевое колесо 104, и будет соответственно управлять устройством наклона транспортного средства. Когда, при создании наклона при постоянной скорости и радиусе поворота (и постоянном боковом ветре и других нагрузках), управляющая сила, воздействующая на рулевое колесо 104, падает до нуля, устройство наклона транспортного средства будет поддерживать наклонное положение равновесия наклоняемой секции. Если рама 102 поддерживается в задней части расположенным по центру единственным задним колесом (трехколесная конфигурация), указанное расположенное по центру заднее колесо может наклоняться вместе с рамой 102. Если транспортное средство, например четырехколесное, где задняя часть рамы 102 поддерживается двумя колесами с шириной колеи, которая соответствует ширине колеи передних колес 103, то будет возможно избрать свободно вращающийся элемент для соединения рамы 102 с указанными задними колесами, при этом указанный вращающийся элемент также свободно вращается вокруг оси, параллельной продольной оси транспортного средства 101, относительно задней оси. Конечно, специалистам, знакомым с предшествующим уровнем техники, будут очевидны другие решения. При помощи устройства обратной подачи (например, основанного на рулевых механизмах с усилением для транспортных средств) возможно добиться искусственными средствами, чтобы управляющая сила все еще прилагалась к рулевому колесу 104, даже в положении наклонного равновесия (фиг. 10) так, что водитель сохраняет "ощущение руля" при прохождении поворота. Для этого можно, например, встроить в рулевую колонку 105 пригодный торсионный элемент. Необязательно, можно обеспечить неполный наклон наклоняемой секции транспортного средства до достижения положения равновесия при прохождении поворота. Следовательно, результирующая сила FR никогда не будет окончательно перпендикулярной продольному направлению паза 114. Следовательно, водитель должен продолжать прилагать силу к рулевому колесу 104, даже при прохождении поворота с постоянным радиусом при постоянной скорости движения. Специалистам в данной области техники будет понятно, что отклонение наклонного положения равновесия от реального наклонного положения при прохождении поворота может следовать прогрессирующей кривой так, что при более быстром движении и/или при большей кривизне поворота водитель отмечает обратную реакцию руля, соответствующую условиям движения. Этот тип механизма обратной реакции руля особенно прост и, например, не требует торсионного элемента, который должен приводиться в действие извне, или чего-то подобного.
Наконец, на фиг. 8 изображено положение задней рулевой тяги и передней рулевой тяги 107 относительно ступицы 109. Будет понятно, что задняя рулевая тяга 106 находится на одной линии со ступицей 109 и с точкой контакта колеса с дорогой. Необходимый угол наклона передней оси достигается при помощи передней рулевой тяги 107.
При наклоне рамы 102 балка 111 будет двигаться вверх и вниз относительно паза 112 в передней рулевой тяге 107.
Таким образом, возможно управлять наклоном рамы 102 вокруг оси, параллельной продольной оси транспортного средства 101, как прямой функции движения рулевого колеса или управляющей силы, в результате чего более нет необходимости в, например, датчиках ускорения.
По сути, нет необходимости приводить вращающийся элемент 113 в плоскость движения задней рулевой тяги. Важно то, что рама 102 направляется вдоль, предпочтительно, прямой направляющей поверхности, которая может занимать горизонтальное или наклонное положение относительно ненаклоняемой секции транспортного средства 101 (здесь: рулевые тяги 106 и 107).
Составные элементы, показанные на фиг. 11, 12 и 13, которые соответствуют аналогичным элементам на фиг. 1-4, имеют аналогичные обозначения.
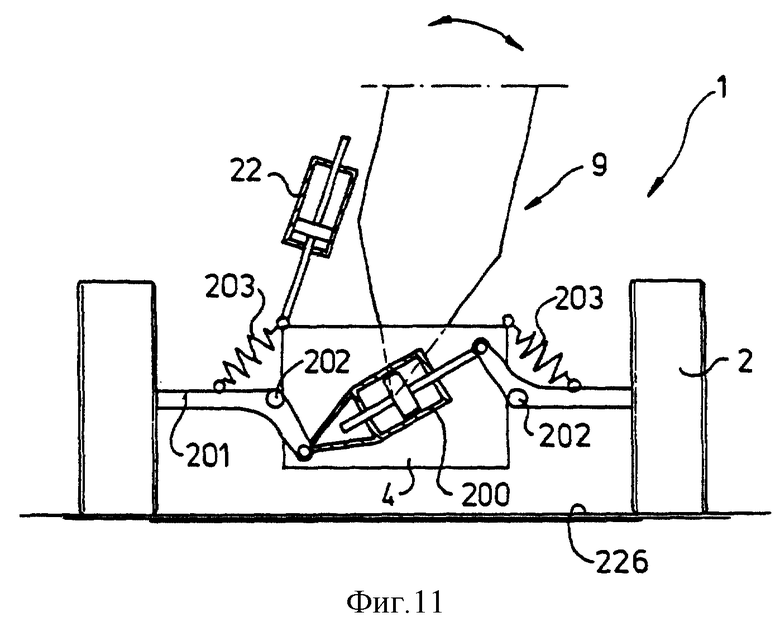
На фиг. 11 показан в особенности преимущественный вариант ненаклоняемой секции 10 транспортного средства 1. С этим вариантом негативные эффекты пружинной подвески 10 задних колес 2 при наклоне секции 9 транспортного средства могут быть ограничены до приемлемых пределов или даже устранены. Это возможно без необходимости выбора особенно сложной конструкции пружинной подвески колес 2. Общий режим работы транспортного средства 1 также может быть усовершенствован в варианте, соответствующем фиг. 11. Вариант воплощения изобретения, соответствующий фиг. 11, основан на понимании того, что существует возможность уменьшения или устранения негативного эффекта пружинной подвески задних колес 2 при наклонном движении наклоняемой секции 9 путем образования момента при помощи средства с силовым приводом, с колесами 2, моменту которых противостоит противодействующий момент, образуемый ненаклоняемой секцией 10 при наклоне наклоняемой секции 9. Этот противоположный момент, который должен образовываться с силовым содействием колесами 2, может иметь такое же значение, как и противодействующий ему момент. Однако в некоторых обстоятельствах это не является абсолютно необходимым. Противоположный момент образуется с помощью приводного элемента 200, который, в этом случае, является узлом двойного действия поршень/цилиндр. Каждое колесо 2 соединено при помощи поворотного рычага 201 с приводным элементом 200. Каждый поворотный рычаг 201 соединен с возможностью поворота шарниром 202 с ненаклоняемой секцией 10 транспортного средства. При помощи удлинения или укорочения приводного элемента 200 может достигаться поворот поворотных рычагов 201 в противоположных направлениях относительно шарниров 202 для образования, таким образом, противоположного момента. Пружинная подвеска колес 2 обеспечивается при помощи элементов пружина/амортизатор 203, которые могут быть обычного типа, и здесь показаны лишь схематично. Указанные элементы 203 соединены с одной стороны с соответствующим поворотным рычагом 201 и с ненаклоняемой секцией 10 транспортного средства 1.
Приводной элемент 200, преимущественно, имеет такую конструкцию, что действие элементов 203 не подвергается воздействию, или подвергается как можно меньшему воздействию при приведении в действие указанного приводного элемента. Приводной элемент 200 должен, таким образом, предпочтительно, иметь такую конструкцию, чтобы движения колес 2 относительно ненаклоняемой секции 10 вследствие, например, неровностей на дороге, допускались даже в момент времени, когда преобладает противоположный момент. Это означает, что сжатие и разгрузка элементов 203 вследствие таких движений колес 2 допускаются элементом 200. В случаях гидравлического или пневматического вариантов действия элемента 200 вариант воплощения изобретения, соответствующий фиг. 12, в этом контексте предпочтителен.
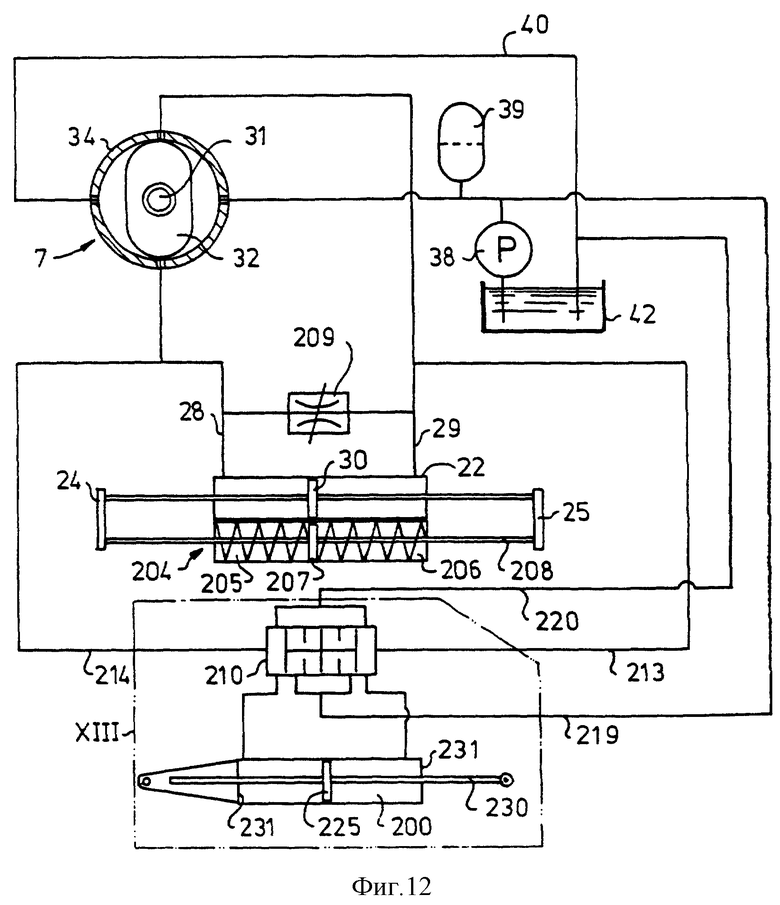
Измеритель управляющего момента или измеритель управляющей силы 7, показанный на фиг. 12, является упрощенным вариантом альтернативных вариантов воплощения изобретения, соответствующих фиг. 3 и 4. Специалистам, знакомым с предшествующим уровнем техники, будет понятно, как измеритель управляющей силы или управляющего момента 7, соответствующий фиг. 3 или 7, или другие его варианты могут применяться в варианте воплощения изобретения, соответствующем фиг. 12. Измеритель 7 в первую очередь используется для управления приводным элементом 22 устройства наклона транспортного средства. Конструкция указанного приводного элемента 22 отличается от конструкции элемента, показанного на фиг. 2. Специалистам в данной области техники будет понятно, как привод устройства наклона транспортного средства, соответствующий фиг. 2, может применяться в варианте воплощения изобретения, соответствующем фиг. 12. В варианте, соответствующем фиг. 12, для получения эффекта наклона было избрано применение единственного узла двойного действия поршень/цилиндр 22.
Указанный узел поршень/цилиндр 22 последовательно соединен с предварительно натянутым узлом 204, при помощи которого узел поршень/цилиндр 30 притянут в нейтральное среднее положение. В показанном альтернативном варианте для этого образован возвратный элемент 204 из двух пружин 207, 206, расположенных с двух сторон от тарелки 207, которая соединена при помощи штока 208 с выступами 24, 25. Конечно, применение альтернативных элементов для возврата привода 22 устройства наклона в его нейтральное, среднее положение, также возможно. Дроссельный элемент 209 с регулируемой установкой встроен между линиями 28, 29, которые ведут к приводному элементу 22.
Управляющий элемент 210 также встроен в гидравлический контур на фиг. 12. Указанный управляющий элемент показан более подробно на фиг. 13. Измеритель 7 контролирует положение управляющего элемента 210 для того, чтобы таким образом управлять приводным элементом 200.
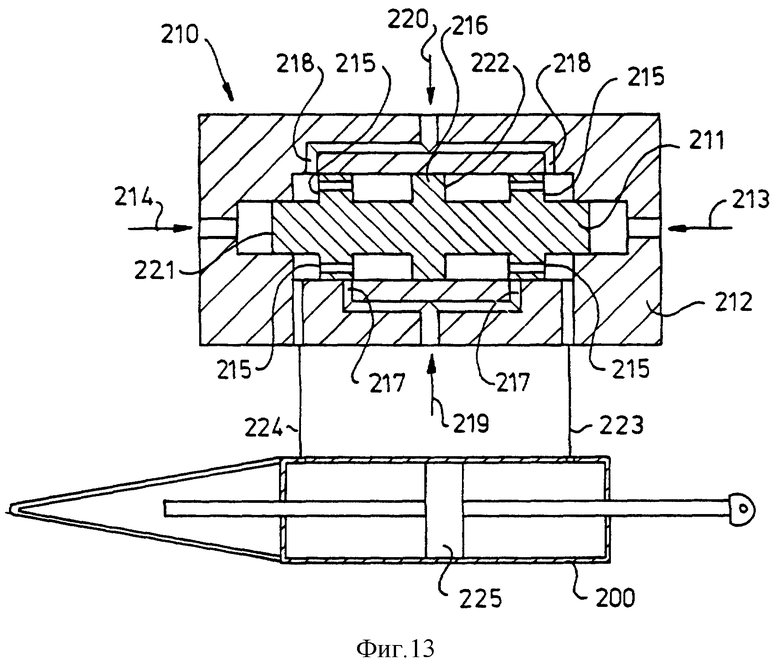
Управляющий элемент 210 показан более подробно на фиг. 13. Указанный управляющий элемент 210 имеет корпус 212, который имеет выемку, в которой тело 211 может перемещаться справа налево и наоборот (на чертеже). Движение указанного тела 211 управляется при помощи разницы давлений, которые воздействуют на его концы. Указанная разница давлений регулируется при помощи гидравлических линий 213 и 214 способом, соответствующим созданию разницы давлений при помощи линий 28 и 29. Кроме того, тело 211 несет на своей периферической поверхности отсечные элементы 215 и управляющий элемент 216, находящийся между ними. В результате движения тела 211 отсечные элементы 215 открывают одно из впускных отверстий 217, 218, одновременно одно из других впускных отверстий 217, 218 закрывается. Впускные отверстия 217 соединены с линией 219, в которой давление, образуемое насосом 38, преобладает. Впускные отверстия 218 соединены с линией 220, в которой преобладает давление, заметно отличающееся от давления, преобладающего в линии 219 (ниже в этом варианте). В принципе, в показанном иллюстративном варианте линия 220 теряет давление, поскольку указанная линия открывается в масляный резервуар 42. Следовательно, в результате движения тела 211 будет создана разница давлений на управляющий элемент 216 так, что образуется сила, которая противостоит силе, воздействующей на тело 211 вследствие разницы давлений в линиях 213 и 214. Следовательно, тело 211 будет в каждом случае занимать положение равновесия в зависимости от разницы давлений, образованных линиями 213, 214 и, соответственно, 219, 220. Путем изменения соотношения площади поверхности концов 221 тела 211 и площади поверхности 222 управляющего элемента 216 существует возможность использовать единственный общий источник давления (насос 38 и накопитель давления) для того, чтобы установить степень смещения тела 211 до положения его равновесия. Таким образом, степень открывания впускного отверстия 218 и перекрытия впускного отверстия 218 и наоборот может регулироваться. Поскольку камеры с обеих сторон управляющего элемента 216 соединены соответствующими линиями 223, 224 с камерами с обеих сторон поршня 225 элемента 200, сила будет последовательно воздействовать на поршень 225 за счет разницы давлений на торцевые поверхности 221 и, следовательно, указанный поршень 225 будет также занимать положение равновесия благодаря разнице давлений на торцевые поверхности тела 211 и на управляющий элемент 216. Разница давлений на торцевые поверхности тела 211 управляется образующейся управляющей силой/управляющим моментом, благодаря чему также контролируется степень наклона наклоняемой секции 9 транспортного средства 1.
Если правое (на фиг. 11) колесо 2 наталкивается на неровность на поверхности дороги и в результате подвергается воздействию направленной вверх (на фиг. ) силы, элемент 225 на фиг. 13 первоначально будет подвержен силе, направленной влево на фиг. Следовательно, давление в линии 224 увеличивается и в результате разного давления устанавливается разница давлений на управляющий элемент 216. Если разница давлений на торцевые поверхности 221 тела 211 остается неизменной, указанное тело 211 будет, следовательно, двигаться в его продольном направлении в новое положение равновесия. Таким образом, противоположный момент может продолжительно сохраняться при помощи элемента 200 при наклонном движении наклоняемой секции 9 транспортного средства 1, в то время как колеса 2 могут следовать неровностям на поверхности дороги 226 при помощи упругого и амортизирующего действия подвески 203.
В качестве примера действие элемента 210 может быть описано следующим образом. Когда управляющий момент воздействует на рулевое колесо 6 в соответствии с вхождением транспортного средства 1 в поворот, разница давления будет производиться между линиями 213 и 214 при помощи измерителя управляющего момента 7. Следовательно, тело 211 движется от его нейтрального, среднего положения, в котором оба впускных отверстия 217 закрыты, например, направо на фиг. При этом движении левое впускное отверстие 217 на фиг. остается закрытым, в то время как правое впускное отверстие 217 на фиг, открыто. Одновременно левое впускное отверстие 218 на фиг. остается открытым, в то время как правое впускное отверстие 218 на фиг закрыто. Следовательно, давление, действующее на правую сторону управляющего элемента 216, будет увеличиваться, противодействуя движению тела 211 вправо. Чем дальше тело 211 движется вправо (на фиг.), тем больше открывается правое (на фиг.) впускное отверстие 217 и одновременно правое (на фиг.) впускное отверстие 218 закрывается и в результате тем больше будет противодействующее давление на правую сторону управляющего элемента 216. В результате тело 211 достигнет положения равновесия. Благодаря тому, что разница давлений, воздействующая на управляющий элемент 216, одновременно воздействует на поршень 225, противоположный момент, который (в значительной степени) нейтрализует эффект воздействия противоположного момента на подвеску 203, образуемого наклоняющим устройством и воздействующего на секцию 10, будет образован одновременно при помощи элемента 200. В результате наклона наклоняемой секции 9 транспортного средства 1 управляющий момент, прилагаемый к рулевому колесу 6, будет постепенно уменьшаться. Одновременно с уменьшением наклонного движения (22, 28, 29), разница давлений, воздействующая на тело 211, образованная линиями 213 и 214, будет также постепенно уменьшаться так, что тело 211 движется назад, влево (на фиг.), в его нейтральное положение, и противоположный момент, образуемый элементом 200, таким образом, также пропорционально уменьшается.
Конечно, возможны другие способы для образования противоположного момента, который, например, имеет такую же величину (но направленный в противоположную сторону), как и реактивный момент, образуемый ненаклоняемой секцией 10 транспортного средства 1 при действии привода 22 наклоняющего устройства для наклона наклоняемой секции 9 транспортного средства 1. Например, управляющий элемент 210 может быть заменен электрическим эквивалентом. Предпочтительно, при таком устройстве должны быть предусмотрены меры для того, чтобы колеса ненаклоняемой секции 10 были способны продолжать неизменно следовать неровностям поверхности дороги 226, даже когда противоположный момент преобладает. Для этого предпочтительно сконструировать привод для образования противоположного момента таким образом, чтобы сжатие и разгрузка колес 2 ненаклоняемой секции 10 оставались возможными.
Элемент 210 применяется не только в транспортных средствах, которые имеют наклоняемую секцию 9. Его применение также возможно в обычных транспортных средствах, не имеющих наклоняющего устройства, например для образования противоположного момента при прохождении поворота для сохранения горизонтального положения транспортного средства, чтобы оно не наклонялось в наружном относительно изгиба поворота направлении, что является обычным для трех- или многоколесных транспортных средств, в то время как в этом случае также остается возможным сжатие и разгрузка отдельных колес без ограничения работы их индивидуальной подвески. Конечно, другие варианты устройства, показанного на фиг. 11-13, также возможны. Например, единственный узел поршень/цилиндр 200 при помощи которого совместно управляются рычаги 201, может быть заменен, например, двумя узлами поршень/цилиндр, каждый из которых затем соединяется одной стороной с ненаклоняемой секцией 10 и другим концом - с одним соответствующим рычагом 201 для управления рычагами 201 индивидуально. Фиг. 11-13 показывают, как приводной шток 230 выдвигается через две торцевые стенки 231 цилиндра узла поршень/цилиндр 200. Следовательно, поршень 225 имеет одинаковые площади поверхности на обеих его сторонах. Специалистам в данной области техники будет понятно, что также могут быть выбраны другие конструкции. Необходимый момент также может быть образован при помощи вращающегося элемента вместо узлов поршень/цилиндр (так называемые линейные исполнительные средства).
Сила может прилагаться к телу 211, например, механическими или электромагнитными средствами вместо средства, применяющего разницу давлений. Механический способ может быть осуществлен, например, с применением вытягивающейся/сжимающейся пружины. Было бы преимущественно управлять движением тела 211 основываясь на силе, а не смещении.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО С ИЗМЕНЯЕМЫМ УГЛОМ НАКЛОНА, ВЫПОЛНЕННОЕ С УПРАВЛЯЕМЫМИ ЗАДНИМИ КОЛЕСАМИ | 2001 |
|
RU2257306C2 |
| НАКЛОНЯЮЩЕЕСЯ ТРАНСПОРТНОЕ СРЕДСТВО | 1998 |
|
RU2225310C2 |
| СРЕДСТВО ПЕРЕДВИЖЕНИЯ С ИЗМЕНЯЕМЫМ УГЛОМ НАКЛОНА | 1998 |
|
RU2205122C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ПЕРЕМЕННОЙ КОЛЕЕЙ | 2011 |
|
RU2570184C2 |
| ВРАЩАТЕЛЬНАЯ СИСТЕМА ПРИВОДА, ИМЕЮЩАЯ РОЛИК, РАБОТАЮЩИЙ ОТ КУЛАЧКА, СО СЪЕМНОЙ ОПОРОЙ КОЛЕСА | 2012 |
|
RU2607714C2 |
| ИНСТРУМЕНТ И УЗЕЛ ИЗ ДВИГАТЕЛЯ И НАСОСА, УСТАНОВЛЕННЫХ НА ОБЩЕМ ВАЛУ ИНСТРУМЕНТА | 2019 |
|
RU2765854C1 |
| ИНСТРУМЕНТ, СОДЕРЖАЩИЙ НАСОС, И НАСОС | 2019 |
|
RU2754797C1 |
| ИНСТРУМЕНТ С НАСОСОМ И НАСОС | 2019 |
|
RU2759455C1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ НАПРАВЛЕНИЕМ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА ВОЗДУШНОЙ И НАЗЕМНОЙ ТРАНСПОРТИРОВКИ | 2015 |
|
RU2686803C2 |
| РУЛЬ И СУДНО, ИМЕЮЩЕЕ ТАКОЙ РУЛЬ | 2010 |
|
RU2533955C2 |
Изобретение относится к самобалансирующим транспортным средствам, имеющим по меньшей мере три колеса, два из этих колес расположены по обеим сторонам от центра тяжести относительно продольной оси транспортного средства и по меньшей мере одно из этих колес может управляться по направлению. По меньшей мере одна секция транспортного средства может наклоняться вокруг продольной оси транспортного средства, и имеется датчик для измерения величины и/или направления нагрузки, или образования, и/или поддержания направления управляемого по направлению колеса при движении, который соединен с управляющим элементом для управления по меньшей мере одним управляемым по направлению колесом. Наклоняющий элемент с силовым содействием применяется для наклона указанной секции транспортного средства вокруг продольной оси транспортного средства, этот наклоняющий элемент соединен с указанным датчиком для осуществления наклона как функции данных, полученных от датчика. Это позволяет обеспечить хорошую стабильность поворота при всех режимах движения, в особенности на больших скоростях. 18 з.п. ф-лы, 13 ил.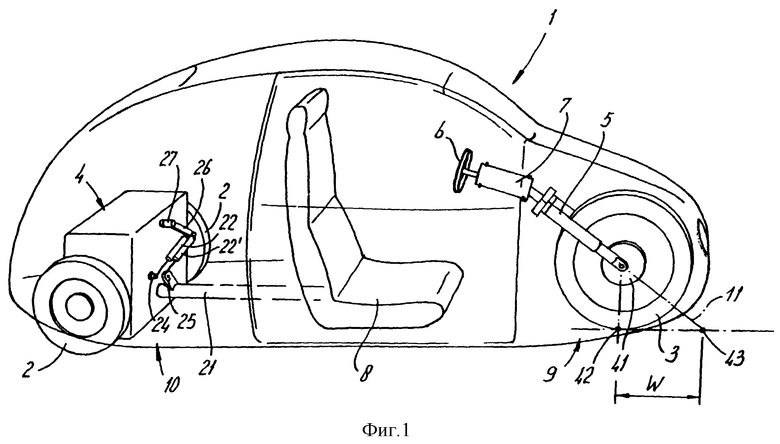
Приоритет по пунктам:
14.06.94 - по пп.1, 3 - 11;
18.04.95 - по пп.2, 14 - 19;
11.08.94 - по пп.12 и 13.
| Шланговое соединение | 0 |
|
SU88A1 |
| Устройство для магнитной записи | 1974 |
|
SU592377A3 |
| 0 |
|
SU153521A1 | |
| Приспособление для включения работомера при нагрузке трактора, превышающей нагрузку холостого хода | 1930 |
|
SU20835A1 |
| Мост транспортного средства | 1988 |
|
SU1585201A1 |

