Изобретение относится к техническим средствам обучения и позволяет формировать специальные, преимущественно сенсомоторные, навыки, необходимые для уверенного управления мотоциклом в реальных условиях, а также совершенствовать в процессе тренировок указанные навыки.
Известны динамические мототренажеры, содержащие установленные на беговых барабанах мотоциклы. Однако в таких тренажерах на мотоцикл при повороте не действует сила, которая в реальных условиях при прохождении поворотов делает необходимым для сохранения равновесия смещение центра тяжести системы мотоцикл - водитель в сторону поворота.
Цель изобретения - моделирование условий, возникающих при различных режимах реального движения мотоцикла.
Эта цель достигается тем, что к раме мотоцикла шарнирно прикреплены разводные направляющие с приводом от беговых барабанов, несущие связанные с рулем мотоцикла перемещаемые грузы.
Кроме того, привод разводных направляющих может быть выполнен в виде гидросистемы, содержащей связанный с беговыми барабанами гидронасос, трубопроводы, дроссель и гидроцилиндр с подпрул иненным поршнем, шток которого с помощью кинема2
тических пар связан с разводными направляющими.
Кинематические пары целесообразно выполнять в виде зз бчатых секторов, входящих
в зацепление с установленными на разводных направляющих зубчатыми рейками.
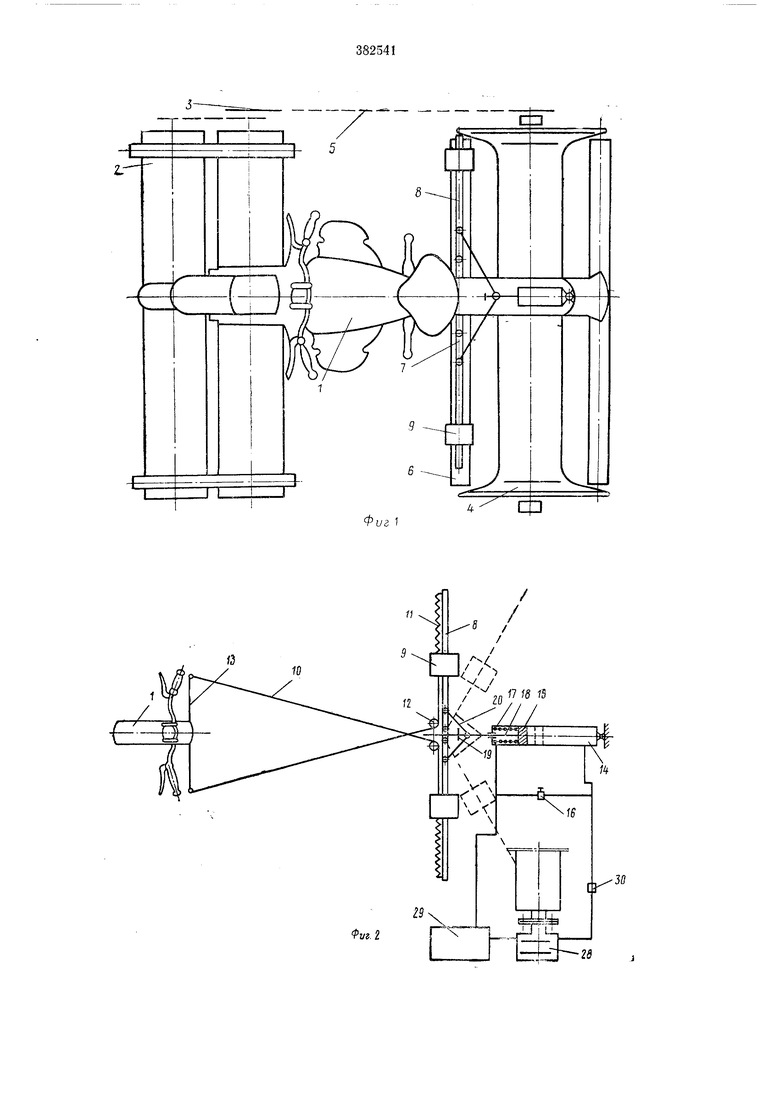
На фиг. 1 изобрал ен предлагаемый мототренажер, общий вид; па фиг. 2 - конструктивная схема привода разводных направляющих, обеспечивающего моделирование действия центробежной силы (сплощными линиями показано положение деталей при максимальной скорости «движения мотоцикла по прямой, а штриховыми - положение при
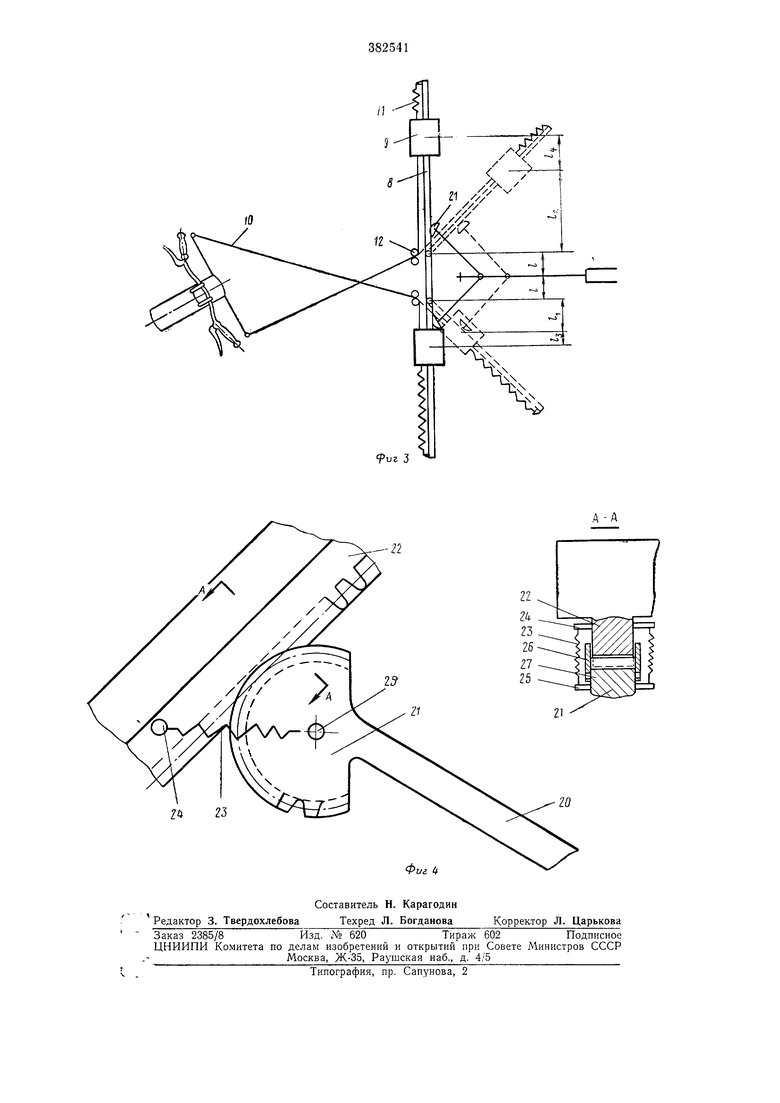
«движении с одной из промежуточных скоростей); на фиг. 3 - констрзктивная схема привода разводных направляющих и привода перемещаемых грузов (щтрифовыми линиями показано положение деталей при повороте
мотоцикла п «движении его с одной из промежуточных скоростей, а сплошными линиями - при «движении с максимальной скоростью); на фиг. 4 - кинематическая пара. Динамический мототренажер содержит мотоцикл /; два передних беговых барабана 2 со звездочками 3; задний беговой барабан 4 со звездочкой; приводные цепи 5; два ограничительных ролика 6 для удержания мотоцикла от продольных перемещений; две щарнирио прикрепленные к жесткой штанге 7 3 разводные направляющие 8, по которым грузы 9 перемещаютея в одну сторону с номощью тросов 10, а в другую - пружинами //; направляющие ролики 12, поворачивающиеся одновременно с рулем мотоцикла5 щтанги 13, с которыми связаны тросы 10; гидроцилиндр 14; порщень 15; обводной трубопровод с дросселем 16; пружина 17 порщня 15; шток 18, который нроходит через направляющую 19. Со щтоком 18 шарнирноЮ связаны две тяги 20, на свободных концах которых имеются зубчатые секторы 21. Секторы 21 входят в зацепление с зубчатыми рейками 22 направляющих 18. Наден ное зацепление между секторами и рейками обес-15 печивается пружинами 23, которые крепятся к пальцам 24 и 25, а также двумя накладными 26, закрепленными на секторе 2} щтифтами 27. Л ототренажер включает гидронасос 28, емкость 29 для рабочей жидкости, редук-20 ционный кланан 30, поворотный кинопроектор, страхующий трос, допускающий свободные боковые перемещения мотоцикла (последний крепится к степке, находящейся сзади пего), съемные страхующие опоры и25 пульт управления. Занятия на динамическом мототренажере - могут быть двух типов: упражнения первопачального обучения, позволяющие формировать специальные навыки, необходимые для30 управления мотоциклом в реальных уелоВИЯХ, и тренировки с целью соверщенствования этих навыков, в том числе при работе на повыщенных скоростях движения. При работе на тренажере в режиме перво-35 начального обучения для предотвращения падения мотоцикла набок он снабжается съемными страхующими опорами, которые ограничивают угол его наклона в пределах, несколько цревыщающих углы, необходимые40 при прохождении, поворотов. Кроме того, при работе в указанном режиме двигатель мотоцикла дросселируется на скорость двил ;ения порядка 40-50 км/час, так как в указапном интервале скоростей обеспечивается45 достаточная устойчивость мотоцикла. Кроме того, водитель имеет относительно больщое время для восприятия и оценки дорожной обстановки, принятия рещения и выполнения необходимых ответных действий.50 При неработающем двигателе мотоцикл располагается как показано на фиг. 1 и удерживается от падения стояночной откидной боковой подставкой. Грузы 9 в это время находятся па равных от продольной оси мо-55 тоцикла расстояниях, а разводные направляющие 8 расположены параллельно продольной оси мотоцикла. Обучаемый мотоциклист запускает двигатель мотоцикла, включает низщую передачу60 и выполняет все действия, необходимые для -трогания с места в реальных условиях. При включении сцепления ведущее колесо мотоцикла начинает вращаться, вращая при этом беговой барабан 4 задней опоры, который65 4 цепной передачей 5 связан с барабанами 2 передней опоры. Бараблны 2 передней опоры также вращаются, передавая вращение на переднее колесо мотоцикла, а следовательно, вращаются все беговые барабаны и оба колеса мотоцикла. Одновременно с началом вращения колес мотоцикла и беговых барабанов начинает работать кинопроектор, который проецирует на экран, расположенный на стене и на полу помещения перед передним колесом мотоцикла, дорожную обстановку. В это время разводные направляющие 8 благодаря тому, что в гидроцилиндр 14 начинает поступать рабочая жидкость, подаваемая насосом 28, занимают какое-то промежуточное положение (на фиг. 2 и 3 показано щтриховыми линиями), причем излищки подаваемой жидкости перетекают по обводному трубопроводу через дроссель 16 в емкость 29. По достижении определенного числа оборотов, т. е. по достижении определенной скорости движения, мотоцикл (как это происходит в реальных условиях) обретает устойчивость. Теперь обучаемый мотоциклист может поставить ноги на подножки мотоцикла и продолжать движение, удержисая мотоцикл в равиовесии незначительными поворотами руля в правую и левую стороны, Таким образом, моделируется прямолинейное движение мотоцикла в реальных условиях. Усложняя условия движения, инструктор поворотом кинопроектора, смещает на экране изображение дороги, побуждая обучаемого мотоциклиста поворачивать руль, чтобы выполнить необходимый в данной обстановке маневр. В реальных условиях каждое измепение направления движения вызывает возникновение центробежной силы. В этих случаях для сохранения равновесия требуется смещение центра тяжести системы мотоцш л - водитель в €торону поворота. На мототренажере каждый поворот руля мотоцикла вызовет с помощью штанг 13, тросов 10 и пружин 11 перемещение грузов 9 по разводным направляющим 8. Оба груза 9 (см. фиг. 3) перемещаются в сторону, противоположную повороту руля мотоцикла. Так, при повороте руля влево оба груза 9 перемещаются в правую сторону. При этом левый груз перемещается под действием своего троса, преодолевая усилие своей пружипы. Правый груз перемещается также в правую сторону, но под действием своей пружины и благодаря уменьщению натяжения своего троса. В результате, расстояния грузов 9 от продольной оси мотоцикла будут следующие: левый груз разместится на расстоянии /+/ь а правый - на расстоянии от продольиой оси мотоцикла. На фиг. 3 штриховыми линиями показано положение деталей мототренажера, соответствующее движению мотоцикла на повороте с одной из промежуточных скоростей. При увеличении скорости движения мотоцикла в результате увеличения
производительности иасоса 28 шток 18 через тяги 20 переместит разводные направляющие 8, и они займут новые положения, например, соответствзющие максимальной скорости движения мотоцикла. Это положение показано на фиг. 3 сплош1 ыми линиями. В результате, расстояние грузов от продольной оси мотопикла изменятся: левый груз находится на расстоянии /+/ -f-/4, а правый на расстоянии l- -L-{-L. Это перемещение вызовет дальнейшее смещение центра тяжести системы мотоцикл - водитель в npaBvro стооону, так как из ДВУХ поиращений /.. При повороте руля мотоцикла вправо мототренажер работает аналогично.
Перемещение грузов 5 по разводным направляющим 5 вызывает смещение центра тяжести системы мотоцикл - водитель, что моделирует действие центробежной силы. При одинаковых по величине линейных переметцениях грузов 9 по разводным направляющим 8. вызываемых поворотами рУля на одинаковые углы, величина опрокидывающего момента, моделирующего действия цетттробежпой силы, меняется в зависимости от угла развода направляюптих 8. который, в свою очередь, зависит от скорости движения мотоцикла. Для достижения прогрессивного роста опрокидывающего момента в зависимости от СКОРОСТИ движения мотоцикла усилие от тяг 20 к разводным направляюншм 8 передается с помощью зубчатых секторов 21 и реек 22.
По мере движения штока 18 влево (см. Аиг. 3 и 4) тяги 20. передавая уснлие на рейки разводных направляющих 8. своими зубчатыми секторами 21 перекатываются по рейкам 22, уменьнгая, тем самым, расстояние от осей качания разво.дных направляющих 8 до точек приложения сил. Это дает приращение угловой СКОРОСТИ поворота разводных направляющих 8. а следовательно, и бо.тее быстрый РОСТ опрокидываюпего момента, приближая характер этого поста к закону роста центробежной силы. Подбором чисел зубьев сектора и его формы можно с достаточной степенью приближения моте.лировать закон роста центробежной силы, действующей на систему мотоцикл - водитель п реальных условиях при прохож тении поворота с переменной скоростью. Таким образом, на данном тренажере обучаемый, как и в реальных условиях, при прохождении поворотов вынужден для сохранения равиовесия производить соответствующий наклон системы мотоцикл - водитель в зависимости
от скорости движения мотоцикла и радиуса поворота.
На тре ажере кромке моделирования прохождения мотоциклом поворотов (маневрировання) в реальных условиях движения можно с помощью поворотного кинопроектора моделировать разлпчные варианты дорожной обстановки, требующей применения торможення Атотоцикла. Время реакции обучаемого мотоциклиста измеряется, фиксируется и оценивается.
В процессе занятий на .динамическом мототренажере в режиме тренировки с целью соверщенствования навыков вожления моделируется в определенной степени характерный элемент деятельностн человека, управляющего мотоциклом в реальных условиях, - элемент риска. Занятия в указанном режиме
проводятся без съемных страхующих опор, поэтому неправильные действия обучаемого мотоциклиста могут привести к падению мотоцикла. B тecтe с тем данный тренажер безопасен. ПОТОМУ то мотопик.т, установленный на беговых барабанах, не имеет поступательной СКОРОСТИ и для страховки крепится тросом к стене, находянтейся сзади него. В случае падения мотоцикла инструктор с пульта управ.лення может выключить двигатель мотоцикла н затормозить беговые барабаны.
Предмет и з о б р е т е н TI я
1.Динамический мототренажер, содержаП1ИЙ установленный беговых барабанах
1 тотоцикл. отлччаюгкипся тем, что, с целью моделирования условий, возникающих при различных режимах реального движения мотоцикла, к раме мотоцикла шарнирно прикреплены разводные направляющие с приводом от беговых барабанов, несущие связанные с рулем мотоцикла перемещаемые .
2.Мототренажер по п. 1, отличающийся тем, что привод разводных направляющттх
выполнен в виде гидросистемы, содержатцей связанный с беговыми барабанами гидронасос, трубопроводы, дроссель и гцдроцилиндр с подпружиненным порщнем, щток которого с помощью кинематических пар связан с разводными направляющими.
3.Мототренажер по пп. 1 и 2, отличающийся тем, что кинематические пары выполнены в виде зубчатых секторов, входящих в
зацепление с установленными па разводных направляющих зубчатыми рейками.
и
ьч
±
Т-/
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2131146C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ И ОТРАБОТКИ АКРОБАТИЧЕСКИХ ПРИЕМОВ САМОСТРАХОВКИ МОТОЦИКЛИСТОВ | 2012 |
|
RU2493607C1 |
| Способ обучения приемам управления четырехколесным внедорожным мототранспортным средством (квадроциклом) и тренажер для его реализации | 2024 |
|
RU2830015C1 |
| СПОСОБ ОБУЧЕНИЯ ВОЖДЕНИЮ БОЕВОГО ТРАНСПОРТНОГО СРЕДСТВА И ТРЕНАЖЕР ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2019 |
|
RU2709344C1 |
| Тренажер транспортного средства | 1987 |
|
SU1508265A1 |
| ДИНАМИЧЕСКИЙ СТЕНД-ТРЕНАЖЕР УСТОЙЧИВОГО ВОЖДЕНИЯ АВТОМОБИЛЯ | 2018 |
|
RU2694427C1 |
| Тренажер для водителей транспортных средств | 1983 |
|
SU1238135A1 |
| ТРЕНАЖЕР ВОЖДЕНИЯ | 1998 |
|
RU2150753C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ МЕХАНИКА-ВОДИТЕЛЯ ГУСЕНИЧНОЙ МАШИНЫ | 2006 |
|
RU2306615C1 |
| Тренажер для обучения вождению гусеничных машин | 1983 |
|
SU1164767A1 |
4 CD
Фиг 1 Г h
