Изобретение относится к устройствам для приведения в действие транспортных средств мускульной силой человека и может быть использовано, например, в колясках, приводимых в движение больными.
Известно транспортное средство с мускульным приводом, в котором имеется ножной привод и ручной привод с качающейся рулевой колонкой, шарнирно соединенный через жесткую тягу дополнительный качающийся рычаг и переключатель ручного привода из рабочего состояния в застопоренное с правым ножным приводом. Перевод возвратно-поступательного движения рулевой колонки и педалей ножного привода во вращательное движение колес в устройстве обеспечивается кареткой захвата, в состав которой входят ролики и собачки. При движении транспортного средства наконечник, закрепленный на тяге ножного привода (движение ног от себя, а рук к себе), включает верхнюю собачку, выключает нижнюю и тянет верхнюю ветвь цепи, соединяющей ведущую и ведомую звездочки. При обратном движении рук и ног наконечник выключает верхнюю собачку, включает нижнюю собачку и тянет нижнюю ветвь цепи. При этом направление вращения колес транспортного средства сохраняется [1]
Недостаток известного устройства состоит в сложности конструкции узла, преобразующего возвратно-поступательное движение во вращательное, так как для обеспечения надежного зацепления собачек за звенья цепи необходимо соблюдать как точность конструктивных размеров составных частей узла, так и точность его установки в конструкции. Кроме того, надежность зацепления звеньев цепи зависит от натяжения цепи. Это снижает надежность устройства в целом. При этом конструкция привода не позволяет изменять усилие на привод ведущих колес в зависимости от характера рельефа дороги, что требует больших затрат мускульных усилий водителя. Кроме того, конструкция привода известного транспортного средства не позволяет производить задний ход, что снижает маневренность транспортного средства, а также совершать движение по инерции.
Наиболее близким к предлагаемому по технической сущности является дрезина [2] мускульный привод которой содержит руль, рулевую колонку, совмещенную с рычагом управления приводом, тягу управления приводом, соединенную одним концом посредством оси с рулевой колонкой, а другим с ведущей звездочкой, которая объединена цепью с ведомой звездочкой.
Недостаток привода состоит в наличии двух мертвых точек при переходе возвратно-поступательного движения рулевой колонки и тяги управления приводом во вращательное движение ведущей звездочки, а именно: в крайнем верхнем положении тяги управления приводом и в крайнем нижнем, что снижает надежность в работе привода, особенно при небольших скоростях. Кроме того, конструкция не позволяет изменять усилие на привод ведущих колес в зависимости от характера рельефа дороги, что требует больших мускульных усилий от водителя; не позволяет совершать задний ход, что снижает маневренность привода, а также совершать движение по инерции.
Таким образом, осуществление мускульных приводов известных транспортных средств не позволяет достичь технического результата, заключающегося в повышении надежности и маневренности, а также в обеспечении возможности движения по инерции, в возможности обеспечения большого усилия на приводе ведущих колес при малых затратах мускульного усилия.
Предлагаемое изобретение решает задачу создания мускульного привода транспортного средства, который при его осуществлении позволяет достичь технический результат, заключающийся в возможности обеспечения большого усилия на приводе ведущих колес при малых затратах мускульного усилия; в возможности длительного движения по инерции; в обеспечении маневренности за счет возможности движения задним ходом; в повышении надежности.
Для этого в мускульный привод транспортного средства, содержащий силовой узел, включающий в себя руль, рулевую колонку, одновременно являющуюся рычагом управления мускульным приводом, главную тягу, соединенную одним концом с рулевой колонкой, ведущую и ведомую звездочки, объединенные цепью, дополнительно введены храповой и реверсный узлы, при этом главная тяга выполнена с возможностью изменения соотношения длин ее рабочих плеч и шарнирно закреплена на раме, одним концом свободно охватывает рулевую колонку, а другим концом шарнирно соединена с концами рабочих тяг, другие концы которых соединены с концами соответствующих качающихся рычагов храпового узла, другие концы которых имеют общую ось с храповыми звездочками узла, жестко соединенными с ведущей звездочкой, при этом на каждом качающемся рычаге установлена собачка с возможностью зацепления с зубьями соответствующих храповых звездочек таким образом, что один из качающихся рычагов всегда находится в верхнем положении, а другой в нижнем, при этом реверсный узел содержит каретку захвата, сопряженную с полуосью, и расположенные одно в другом, обращенные друг к другу рабочими поверхностями и жестко соединенные на оси реверсного узла большое и малое зубчатые колеса, по окружностям рабочих поверхностей которых поперек установлены ролики, соответственно каретка захвата выполнена или в виде колеса, по окружности наружной поверхности которого поперек установлены ролики, или в виде зубчатого колеса, кроме того в устройство введен рычаг управления реверсным узлом, шарнирно соединенный с тягой управления реверсным узлом, который закреплен на тяге управления с возможностью сцепления с кареткой захвата рабочими поверхностями или большого, или малого колес, при этом ведомая звездочка установлена на оси реверсного узла и жестко соединена с ним. Кроме того, тяга управления реверсным узлом содержит тягу, подвижно соединенную через Г-образный рычаг с рычагом, который жестко соединен с осью реверсного узла, одним концом подвижно закреплен с помощью кронштейна на раме, а другим концом, снабженным сквозным продольным пазом, соединен с Г-образным рычагом посредством пальца, зафиксированным в пазу шайбой со шплинтом. При этом рулевая колонка нижним концом посредством шарнира Гука соединена с кронштейном, который жестко соединен с кронштейном поворотной вилки переднего колеса транспортного средства, закрепленной в корпусе, жестко соединенном с рамой транспортного средства. Конец главной тяги, свободно охватывающий рулевую колонку, снабжен рукояткой, а главная тяга выполнена в виде зубчатой рейки, размещенной в направляющей, шарнирно закрепленной на раме, кроме того в направляющей размещен с возможностью зацепления с зубьями рейки управляемый фиксатор, соединенный посредством гибкого троса с рычажком, закрепленным на рулевой колонке.
Технический результат достигается следующим образом.
Благодаря тому что главная тяга одним концом свободно охватывает рулевую колонку, а другой ее конец соединен шарнирно с концами рабочих тяг, возвратно-поступательное движение рулевой колонки сообщается через главную тягу рабочим тягам. Шарнирное соединение рабочих тяг с качающимися рычагами храпового угла обеспечивает плавность передачи возвратно-поступательного движения рычагам. Благодаря тому что на каждом из рычагов установлена собачка с возможностью зацепления с зубьями соответствующих храповых звездочек таким образом, что один из качающихся рычагов всегда находится в верхнем положении, а другой в нижнем, а храповые звездочки жестко соединены с ведущей звездочкой, обеспечивается зацепление с зубьями храповых звездочек одной из собачек качающихся рычагов при поступательном движении рулевой колонки, а другой собачки при ее возвратном движении, что сохраняет направление вращения ведущей звездочки и исключает холостой ход храпового механизма.
Простота конструктивного исполнения узлов преобразования возвратно-поступательного движения во вращательное, отсутствие сложных деталей (система рычагов и тяг) и независимость от натяжения цепи, объединяющей ведущую и ведомую звездочки, повышает надежность предлагаемого привода.
Главная тяга, благодаря шарнирному закреплению на раме, а также благодаря тому что одним концом она свободно обхватывает рулевую колонку, а другим шарнирно соединена с рабочими тягами, представляет из себя двуплечий рычаг, для которого точкой опоры является точка крепления главной тяги к раме, а плечами плечо, ограниченное местом охвата рулевой колонки и точкой опоры, и плечо, ограниченное точкой опоры и шарнирным соединением главной тяги с рабочими тягами. Выполнение главной тяги в виде зубчатой рейки, размещенной в направляющей, шарнирно закрепленной на раме, а также размещение в направляющей с возможностью зацепления с зубьями рейки управляемого фиксатора, соединенного посредством гибкого троса с рычажком, закрепленным на рулевой колонке, позволяет в зависимости от требуемого усилия на привод изменять соотношение длин верхнего и нижнего плеч главной тяги. В результате при малых затратах мускульного усилия обеспечивается большое усилие на привод ведущих колес.
Возможность осуществления заднего хода обеспечивается введением в привод реверсного узла. Благодаря тому что реверсный узел выполнен в виде большого и малого колес, расположенных на одной оси с ведомой звездочкой одно в другом и жестко соединенных с ведомой звездочкой, обеспечивается возможность использования вращательного движения ведомой звездочки, направление вращения которой в процессе работы не изменяется, для организации работы реверсного узла. Благодаря тому что каретка захвата сопряжена с полуосью, на которую крепится колесо транспортного средства, а сама каретка также выполнена в виде колеса, при сцеплении каретки с рабочей поверхностью малого или большого колес колесу каретки захвата сообщается вращательное движение, направленное в сторону, противоположную направлению вращения малого колеса, или совпадающее с направлением вращения большого колеса. Это и обеспечивает возможность организации заднего хода в предлагаемом приводе. Выполнение большого и малого колес зубчатыми, а рабочей поверхности захватной каретки в виде роликов, установленных по окружности колеса каретки, или установка поперек рабочей поверхности по окружности большого и малого колес роликов и выполнение захватной каретки в виде зубчатого колеса, т.е. сочетание роликов с зубьями, обеспечивает плавность зацепления захватной каретки с рабочими поверхностями большого и малого колес, что в свою очередь обеспечивает плавность хода. Этим же обеспечивается плавность переключения режимов работы реверсного узла, так как ролики, имея собственные оси вращения, по инерции прокручиваются до тех пор, пока зубья не займут устойчивое положение. Управление работой реверсного узла обеспечивает рычаг и тяга управления реверсным узлом. Благодаря тому что тяга управления содержит тягу, соединенную с рычагом, жестко соединенным с осью реверсного узла, через Г-образный рычаг, возвратно-поступательное перемещение рычага управления вызывает вертикальное смещение большого и малого колес реверсного узла относительно каретки захвата. При поступательном движении рычага управления колеса реверсного узла поднимаются вверх, что обеспечивает прижим к захватной каретке рабочей поверхности большого колеса. При возвратном движении рычага управления колеса реверсного узла опускаются, что обеспечивает прижим к захватной каретке рабочей поверхности малого колеса. Соответственно включаются передний или задний ход. Нейтральное положение каретки соответствует свободному ходу, т.е. движению по инерции. Это позволяет использовать накат, включая свободный ход и в нужный момент выключая его. В результате обеспечивается маневренность транспортного средства.
Таким образом, предлагаемый мускульный привод транспортного средства при его осуществлении позволяет достичь технический результат, заключающийся в возможности обеспечивать большое усилие на приводе ведущих колес при малых затратах мускульного усилия; в возможности длительного движения по инерции; в обеспечении маневренности за счет возможности движения задним ходом; в повышении надежности.
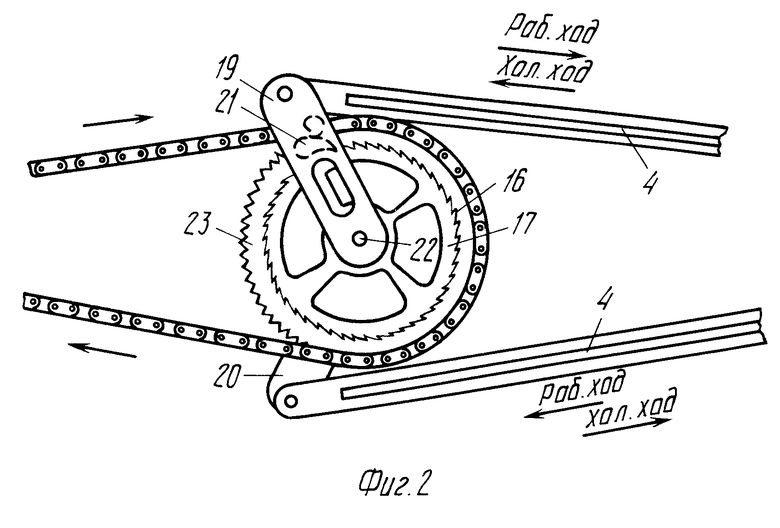
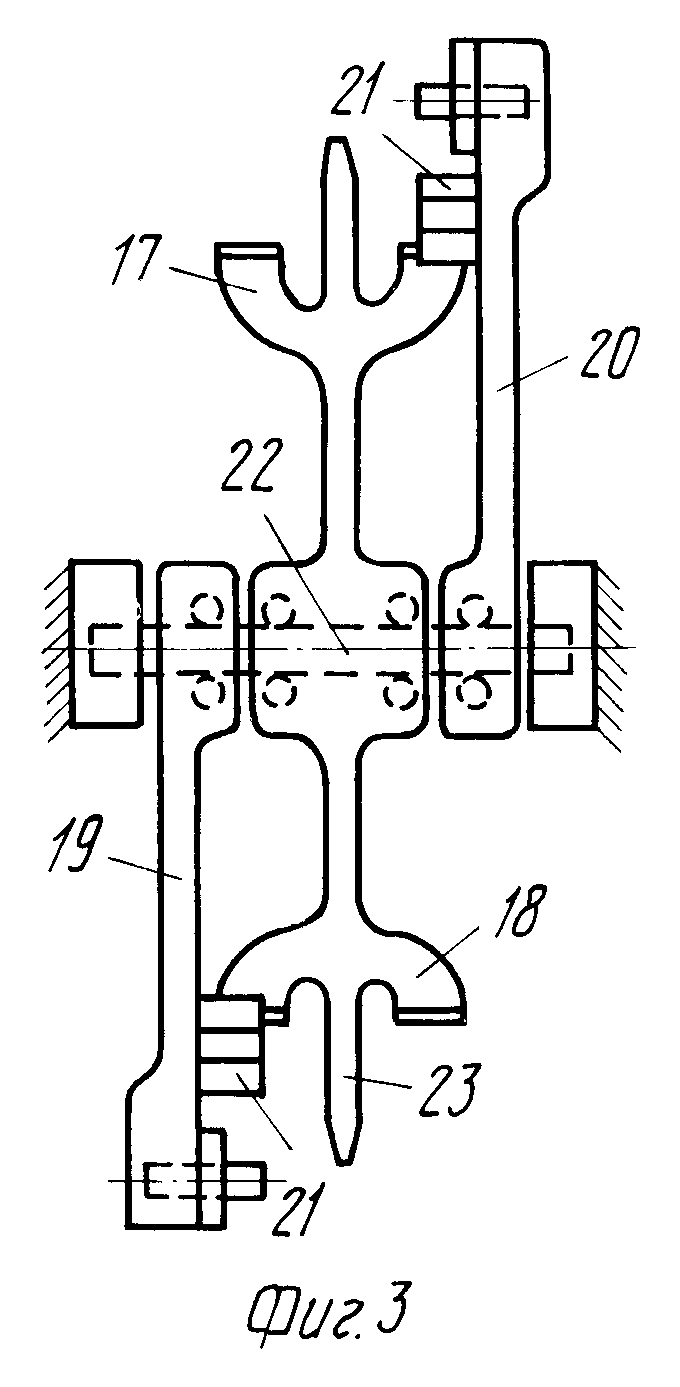
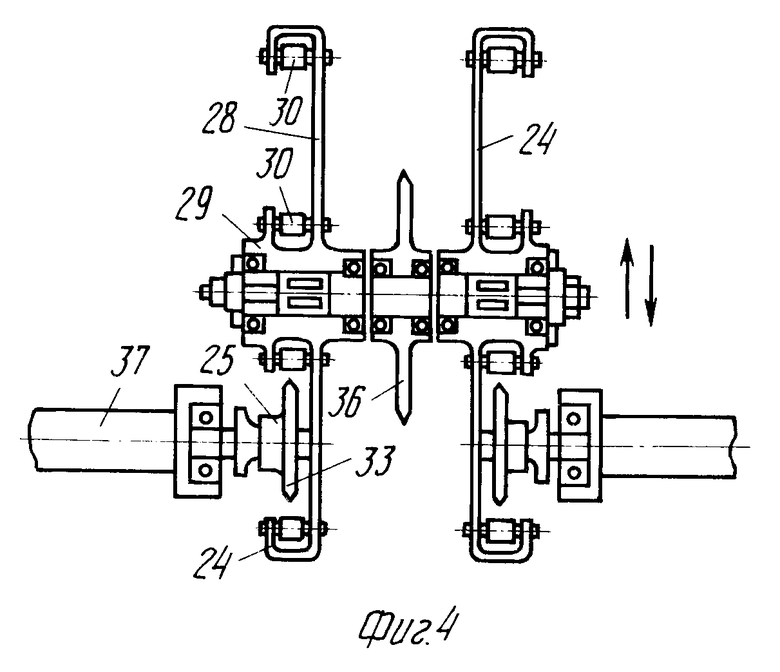
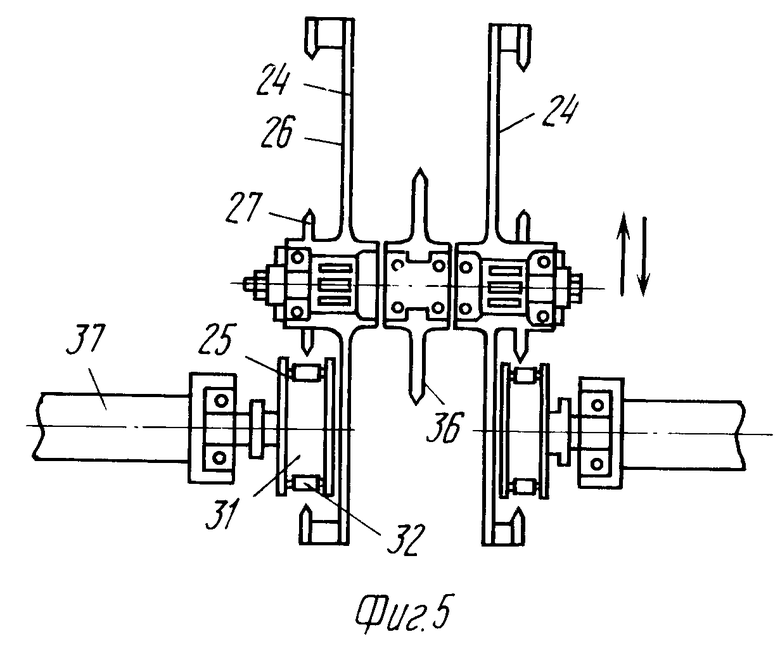
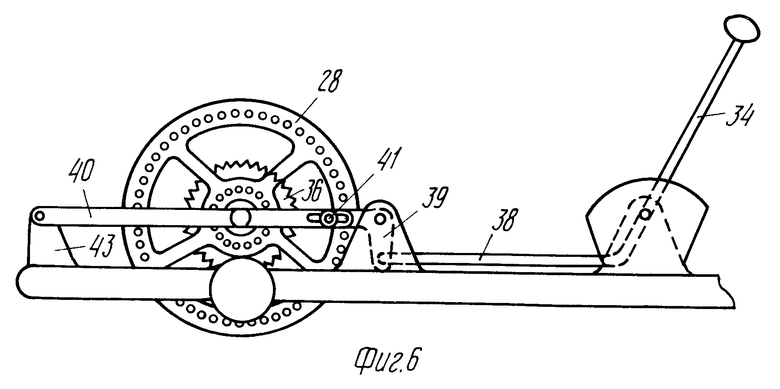
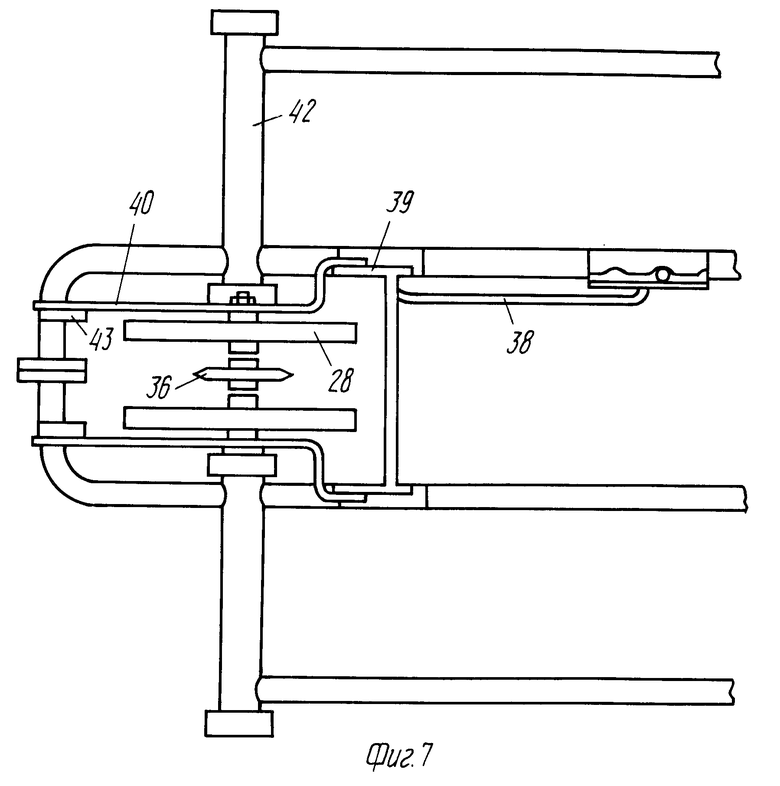
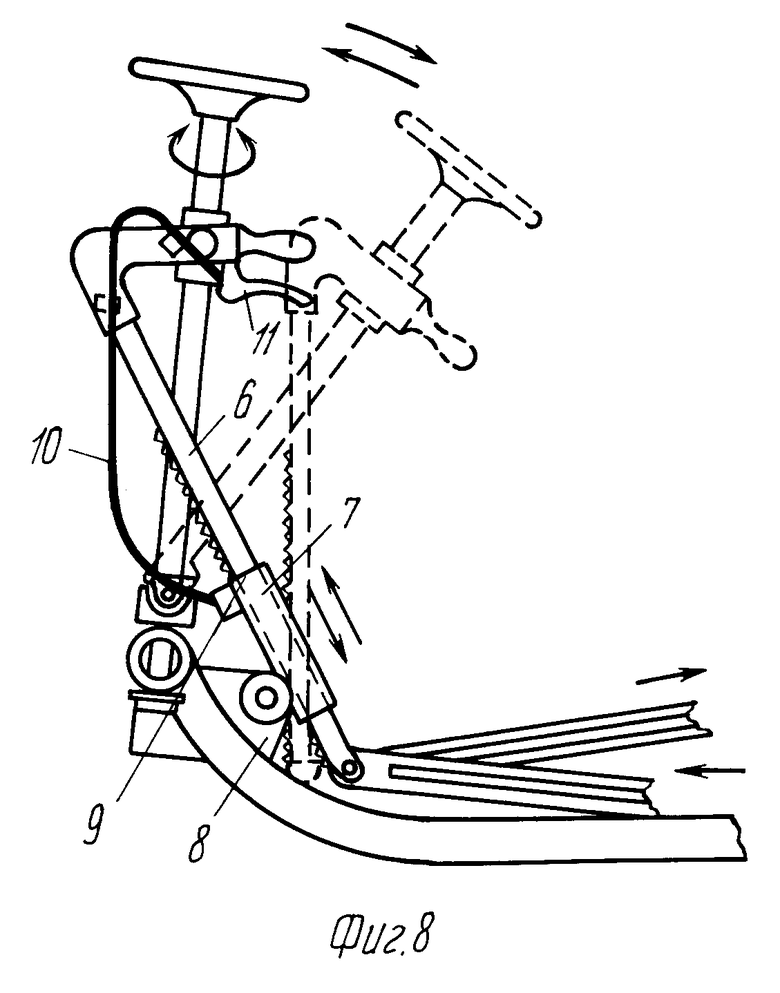
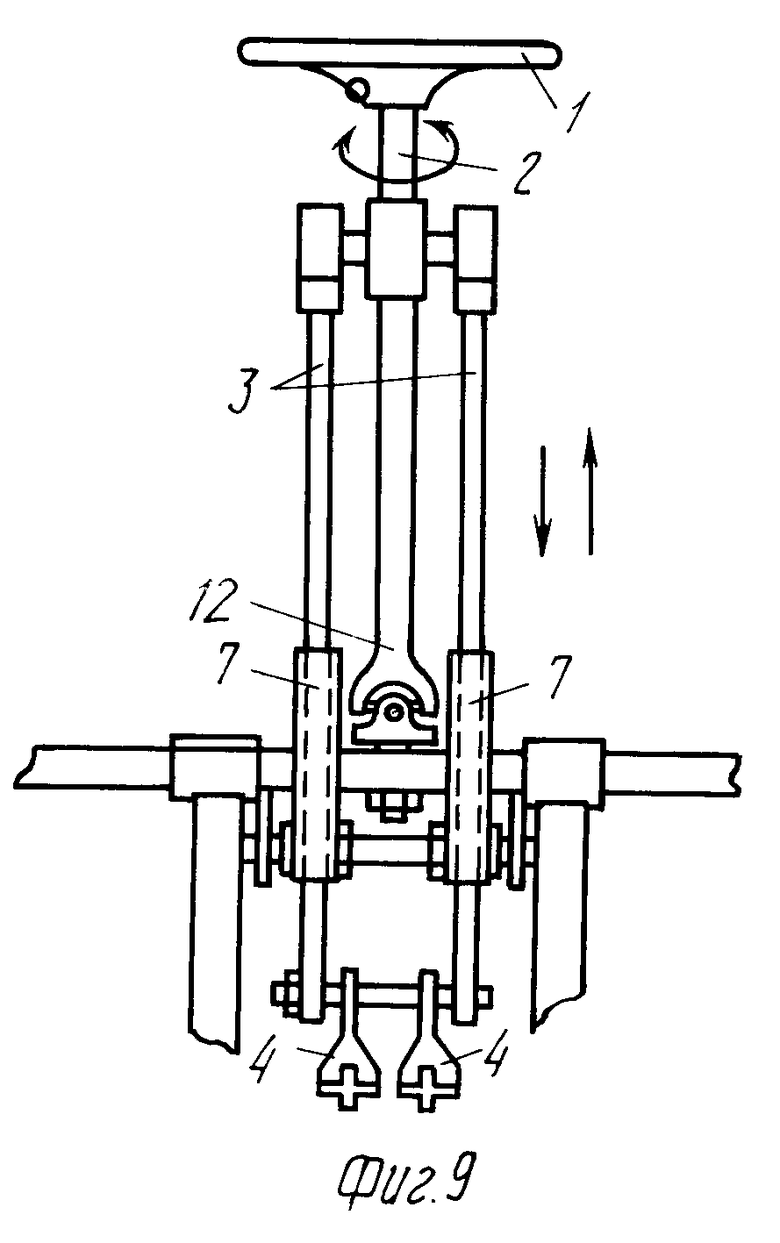
На фиг.1 изображен мускульный привод транспортного средства, установленного на раме, общий вид; на фиг.2 храповой узел, вид сбоку; на фиг.3 то же, вид сверху; на фиг.4 реверсный узел; на фиг.5 I положение работы реверсного узла; на фиг. 6 тяга управления реверсным узлом; на фиг.7 пример установки реверсного узла в транспортное средство; на фиг.8 главная тяга; на фиг.9 II положение главной тяги.
Мускульный привод транспортного средства содержит силовой, храповой и реверсный узлы.
Силовой узел включает в себя руль 1, рулевую колонку 2, одновременно являющуюся рычагом управления мускульным приводом, главную тягу 3 и рабочие тяги 4. Главная тяга 3 шарнирно закреплена на раме, одним концом свободно обхватывает рулевую колонку 2 и снабжена рукояткой 5, другим концом тяга 3 шарнирно соединена с концами рабочих тяг 4. Главная тяга 3 выполнена с возможностью изменения соотношения длин ее рабочих плеч и может быть выполнена, например, в виде зубчатой рейки 6, размещенной в направляющей 7, шарнирно закрепленной на раме на кронштейне 8. Кроме того, в направляющей размещен управляемый фиксатор 9 с возможностью зацепления с зубьями рейки 6. Фиксатор 9 соединен посредством гибкого троса 10 с рычажком 11, закрепленным на рулевой колонке 2. Рулевая колонка 2 посредством шарнира Гука 12 соединена с кронштейном 13, жестко соединенным с кронштейном 14 поворотной вилки (не показана) переднего колеса, которая закреплена в корпусе 15, жестко соединенном с рамой транспортного средства.
Храповой узел 16 закреплен на раме транспортного средства (на фиг. не показано) и содержит храповые звездочки 17 и 18 и качающиеся рычаги 19 и 20, снабженные собачками 21. Храповые звездочки 17 и 18 и вторые концы качающихся рычагов 19 и 20 имеют общую ось 22. Кроме того, храповые звездочки 17 и 18 жестко соединены с ведущей звездочкой 23. Собачки 21 на каждом качающемся рычаге 19 и 20 установлены с возможностью зацепления с зубьями соответствующих храповых звездочек 17 и 18. При этом один из рычагов 19 и 20 всегда находится в верхнем положении, а другой в нижнем. Кроме того, качающиеся рычаги 19 и 20 первыми концами шарнирно соединены с концами соответствующих рабочих тяг 4.
Реверсный узел 24 содержит каретку захвата 25 и расположенные одно в другом, обращенные друг к другу рабочими поверхностями и жестко соединенные на оси реверсного узла 24 или большое 26 и малое 27 зубчатые колеса (фиг.5), или большое 28 и малое 29 (фиг.4) колеса, по окружностям рабочих поверхностей которых, поперек, установлены ролики 30. Соответственно каретка захвата 25 выполнена или в виде колеса 31, по окружности наружной поверхности которого, поперек, установлены ролики 32 (фиг.5), или в виде зубчатого колеса 33. Рычаг 34 управления реверсным узлом 24 шарнирно соединен с тягой управления 35 реверсным узлом 24. При этом реверсный узел 24 закреплен на тяге управления 35 с возможностью сцепления с кареткой захвата 25 рабочими поверхностями или большого 26 (28), или малого 27 (29) колес. Ведомая звездочка 36 установлена на оси реверсного узла 24 и жестко соединена с ним. Каретка захвата 25 сопряжена с полуосью 37, на которую устанавливают ведомое колесо транспортного средства. При этом тяга управления 35 реверсным узлом 24 содержит тягу 38, подвижно соединенную через Г-образный рычаг 39 с рычагом 40, жестко соединенным с осью реверсного узла 24. Один конец рычага 40 с помощью кронштейна подвижно закреплен на раме. Другой конец рычага 40 снабжен сквозным продольным пазом. Г-образный рычаг 39 соединен с рычагом 40 посредством пальца 41, зафиксированного в пазу шайбой со шплинтом.
В примере выполнения предлагаемого мускульного привода транспортного средства реверсный узел 24 используют в транспортном средстве с двумя задними колесами. На фиг. 4, 5 и 7 показаны два реверсных узла 24 в сборке с ведомой звездочкой 36. Сборку из двух реверсных узлов 24 с ведомой звездочкой 36 в примере выполнения устанавливают следующим образом (фиг.7). Полуоси 37 размещают во втулках 42, жестко соединенных с рамой транспортного средства. Ось реверсных узлов 24 жестко соединяют с рычагами 40, вторые концы которых подвижно закрепляют на раме на кронштейнах 43. Тяга управления 35 и рычаг управления 34 реверсным узлом закреплены на раме транспортного средства (на фиг. не показано) с обеих сторон от реверсных узлов 24.
Мускульный привод транспортного средства работает следующим образом.
Для движения транспортного средства вперед рычаг управления 34 реверсным узлом 24 устанавливают в положение, при котором с захватной кареткой 25 взаимодействует рабочая поверхность большого колеса 26 (28). При движении рулевой колонки 2 на себя нижний конец главной тяги 3 перемещается вперед и тянет за собой рабочие тяги 4. При этом собачка 21 качающегося рычага 19, находящегося в верхнем положении, зацепляется за зуб храповой звездочки 17 и при дальнейшем перемещении рабочей тяги 4 поворачивает звездочку 17, одновременно с которой поворачивается и ведущая звездочка 23 (фиг.2). При движении рулевой колонки 2 от себя нижний конец главной тяги 3 перемещается назад и толкает перед собой рабочие тяги 4. В этом случае аналогично срабатывает собачка 21 нижнего качающегося рычага 20. Направление вращения ведущей звездочки 23 сохраняется и посредством цепи передается на ведомую звездочку 36, жестко соединенную с реверсным узлом 24. При этом большое 26 (28) и малое 27 (29) колеса реверсного узла 24 вращаются синхронно с ведомой звездочкой 36. Направление вращения каретки захвата 25, взаимодействующей с рабочей поверхностью большого колеса 26 (28), совпадает с направлением вращения большого 26 (28) и малого 27 (29) колес и транспортное средство движется вперед.
Для совершения транспортным средством заднего хода рычаг управления 34 реверсным узлом 24 устанавливают в положение, при котором с кареткой захвата 25 взаимодействует рабочая поверхность малого колеса 27 (29) (фиг.4). При этом при перемещении рулевой колонки 2 направление вращения ведущей звездочки 23, ведомой звездочки 36 и большого 26 (28) и малого 27 (29) колес реверсного узла 24 сохраняется, а захватная каретка 25 изменяет направление вращения на противоположное. В результате задние колеса транспортного средства вращаются в обратную сторону.
Для движения по инерции рычаг 34 управления узлом 24 устанавливают в такое положение, при котором рабочие поверхности колес 26 (28), 27 (29) и захватной каретки 25 не соприкасаются.
В случае необходимости преодоления препятствий, обусловленных изменением рельефа дороги, или при трогании с места для снижения мускульного усилия водителя с одновременным увеличением усилия на привод ведущих колес изменяют соотношение длин плеч главной тяги 4. Для этого отжимают рычажок 11 фиксатора 9 и освобождают зубчатую рейку 6 главной тяги 4 в направляющей 7 от зацепления с фиксатором 9. Рукояткой 5 поднимают или опускают главную тягу 4, отпускают рычажок 11 фиксатора 9 и последний фиксирует новое положение рейки 6 в направляющей 7. Если мускульное усилие снизилось недостаточно операцию повторяют вновь.
Управление поворотом переднего колеса осуществляют, сообщая рулевой колонке 2 вращательное движение в нужном направлении, которое через шарнир Гука 12 передается поворотной вилке колеса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортное средство с мускульным приводом | 1986 |
|
SU1311996A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2008 |
|
RU2392166C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО, ПРИВОДИМОЕ В ДЕЙСТВИЕ МУСКУЛЬНОЙ СИЛОЙ ВОДИТЕЛЯ | 1992 |
|
RU2106278C1 |
| Кресло-коляска | 1988 |
|
SU1572619A1 |
| Транспортное средство, приводимое в действие мускульной силой человека, преимущественно велосипед | 2017 |
|
RU2651477C1 |
| ПОЛНОПРИВОДНЫЙ ВЕЛОСИПЕД | 1995 |
|
RU2097249C1 |
| ТАНДЕМ А.Г. ДВОРЯНИДОВА | 2003 |
|
RU2247051C1 |
| ДВУХКОЛЕЙНЫЙ ДВУХКОЛЕСНЫЙ ВЕЛОСИПЕД С ПЛАВАЮЩЕЙ КАБИНОЙ | 1995 |
|
RU2090429C1 |
| СКЛАДНОЙ ВЕЛОМОБИЛЬ | 2004 |
|
RU2274575C1 |
| СКЛАДНОЙ ВЕЛОМОБИЛЬ | 2006 |
|
RU2299827C1 |
Использование: для транспортных средств, приводимых в действие мускульной силой человека, а также в колясках, приводимых в движение больными. Сущность изобретения: привод содержит силовой, храповой и реверсный узлы 24. Управление приводом выполняет рулевая колонка 2, являющаяся одновременно рычагом управления. Главная тяга 3 шарнирно закреплена на раме и одним концом соединена с рулевой колонкой 2, а другим - с концами рабочих тяг 4. Качающиеся рычаги 19 и 20 храпового узла соединены с рабочими тягами 4. Возвратно-поступательное движение рулевой колонки 2 посредством тяг 3 и 4, рычагов 19 и 20, снабженных собачками, преобразуется во вращательное движение храповых звездочек и ведущей звездочки 23. Ведущая звездочка 23 сообщена посредством цепи с ведомой звездочкой. Ведомая звездочка жестко соединена на общей оси с реверсным узлом 24. Последний осуществляет включение переднего, свободного и заднего хода. Главная тяга 3 выполнена с возможностью изменения соотношения длин ее рабочих плеч. Положительный эффект - повышение маневренности, снижение мускульного усилия на привод. 3 з.п. ф-лы, 9 ил.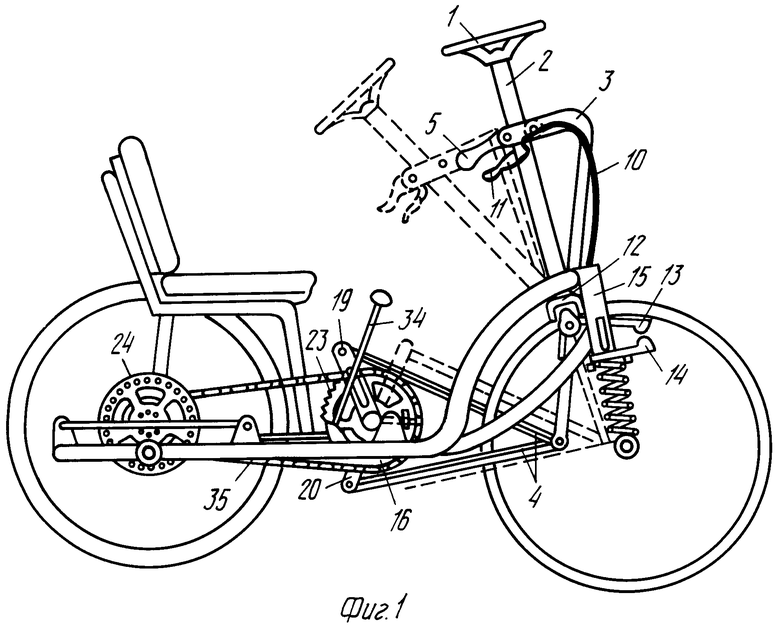
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Южный техник | |||
| М.: Молодая гвардия, 1980, N 2, с.65-68. | |||
