Изобретение относится к механическим манипуляторам, предназначенным для работы в изолированных камерах с радиоактивными веществами и исключающим непосредственный контакт человека с этими веществами.
Известен копирующий манипулятор, содержащий двуплечий рычаг, несущий рабочий орган. Двуплечий рычаг в средней части выполнен со сферическим утолщением, установленном в шаровом поясе вваренном в стенку изолированной камеры. В зазоре между сферическим утолщением и шаровым поясом установлен сепаратор с шариками. Шаровой пояс герметизирован сильфоном, приваренным к этому поясу, а с другой стороны к двуплечему рычагу (а.с. СССР №517482, МКИ4 B25J 1/00). Недостатком копирующего манипулятора является ограниченная область обслуживания т.к. рабочий орган может перемещаться по сферической поверхности одного радиуса, и из-за того, что длина рабочего плеча двуплечего рычага не может быть изменена в процессе работы.
Известен также манипулятор, содержащий корпус, установленный в нем привод поступательного движения и захватный орган, связанный с корпусом посредством шарнирного многозвенника (а.с. СССР №963847, МКИ4 B25J 9/00). Этот манипулятор имеет более широкую область обслуживания по сравнению с копирующим манипулятором по авторскому свидетельству №517482, благодаря возможности изменять длину шарнирного многозвенника в процессе работы. Однако ему присуща относительно низкая жесткость исполнительного органа, что снижает точность фиксации образцов при осуществлении технологических операций. Низкая жесткость обусловлена конструкцией шарнирного многозвенника.
Повышенная жесткость достигнута в исполнительном органе манипулятора содержащем корпус, установленный в нем привод поступательного перемещения, рабочий орган выполненный в виде двух параллельных шарнирных многозвенников, связанных внутренними шарнирами с секциями телескопического механизма, установленного между этими шарнирными многозвенниками. Этот исполнительный механизм из-за наличия в нем двух шарнирных многозвенников имеет сложную громоздкую конструкцию. Исключением же одного из шарнирных многозвенников может привести при работе к перекосам секции и заклиниванию телескопического механизма. Перекосов секции телескопического механизма будут обусловлены тем, что шарнирный многозвенник удален от центра тяжести телескопического механизма на существенное расстояние и усилия передаваемые шарнирным многозвенником будут создавать значительные изгибающие моменты, действующие на эти секции.
В качестве прототипа взят шпаговый манипулятор, содержащий проходку, шаровую опору, смонтированную в ней трубку, в которой размещена с возможностью поступательного перемещения штанга, имеющая на одном конце замковый орган для крепления сменных инструментов, а на другом - герметичный привод штанги манипулятора, шаровая опора выполнена из трех сферических элементов, концентрично расположенных друг относительно друга. Внутренний сферический элемент через герметичный чехол связан с проходкой. Внутренний и наружный сферические элементы образуют полость, в которой расположен средний сферический элемент связанный с трубкой. Герметичный чехол выполнен в виде сильфона и для повышения надежности фиксации положения исполнительного органа, он снабжен фиксатором, выполненным в виде резьбовой втулки с внутренней кольцевой сферической поверхностью и предназначенной для взаимодействия с наружным сферическим элементом шаровой опоры. Полость, образованная внутренним и наружным сферическими элементами заполнена экранирующим веществом, поглощающим ионизирующее (бета и гамма) излучения. В качестве такого экранирующего вещества может быть использован порошок иридия, графита или проточная вода (а.с. СССР №117241, МКИ4 F27D 23/00).
Недостатком прототипа является ограниченная область обслуживания, т.к. величина продольного перемещения замкового органа равна величине продольного перемещения ручки управления, которая в свою очередь определяется возможностями сильфона изменять свои линейные размеры.
Целью изобретения является расширение области обслуживания.
Поставленная цель достигается тем, что в известном шпаговом манипуляторе, содержащем образованный подвижной штангой и захватом исполнительный орган, установленную в стенке камеры шаровую опору, герметизирующие сильфоны и рукоятку управления в котором подвижная штанга исполнительного органа пропущена через шаровою опору, герметизирующие сильфоны и связана с рукояткой управления, Согласно изобретению захват соединен с подвижной штангой многократным шарнирным параллелограммом, усиленным установленным вдоль его оси раздвижным элементом жесткости, который образован пластинами, связными между собой с помощью направляющих.
Из отличительных от прототипа признаков в аналогах известны следующие: во-первых, выполнение исполнительного органа в виде многократного шарнирного параллелограмма с захватом (а.с. СССР 963847), во-вторых, оснащение многократного шарнирного параллелограмма раздвижным элементом жесткости. Выполнение же раздвижного элемента жесткости в виде пластин, связанных между собой с помощью направляющих в аналогах не обнаружено. Заявляемое исполнение раздвижного элемента жесткости по сравнению с телескопическим позволяет упростить конструкцию, т.к. отпадает необходимость в дополнительном многократном шарнирном параллелограмме, расположенном симметрично основному относительно раздвижного элемента жесткости. Действительно, плоский раздвижной элемент жесткости по сравнению с телескопическим менее подвержен перекатыванию. Следовательно заявляемый шпаговый манипулятор отвечает критерию «существенные отличия».
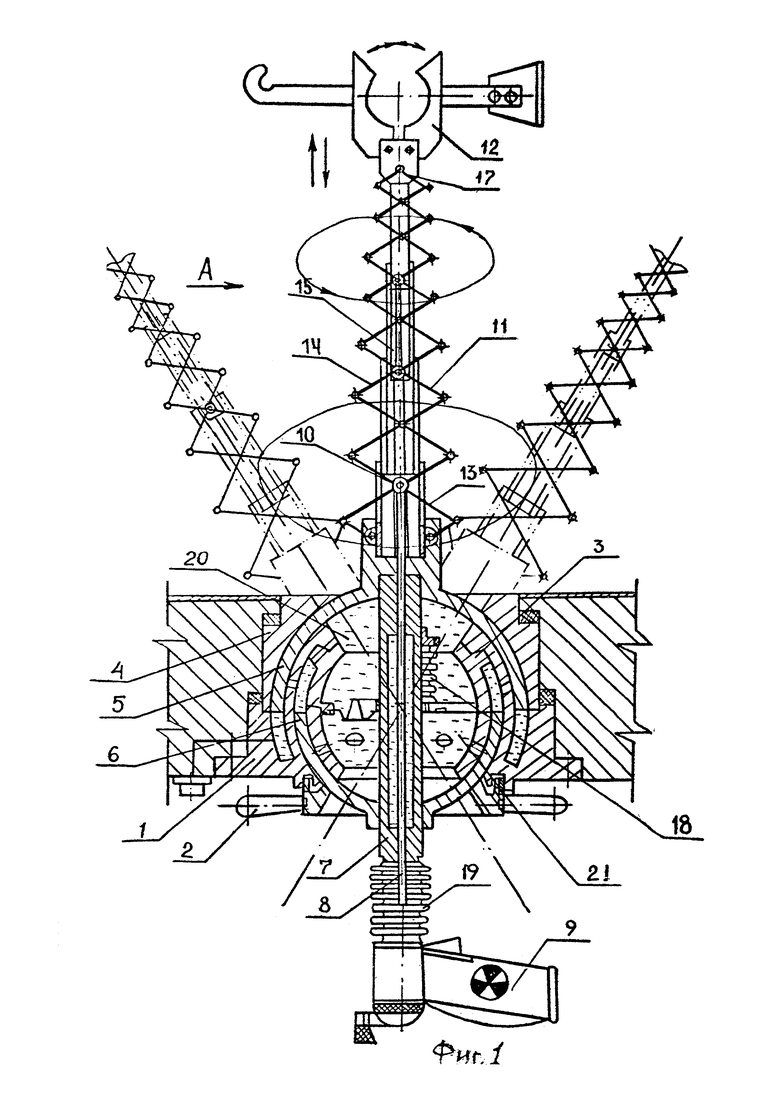
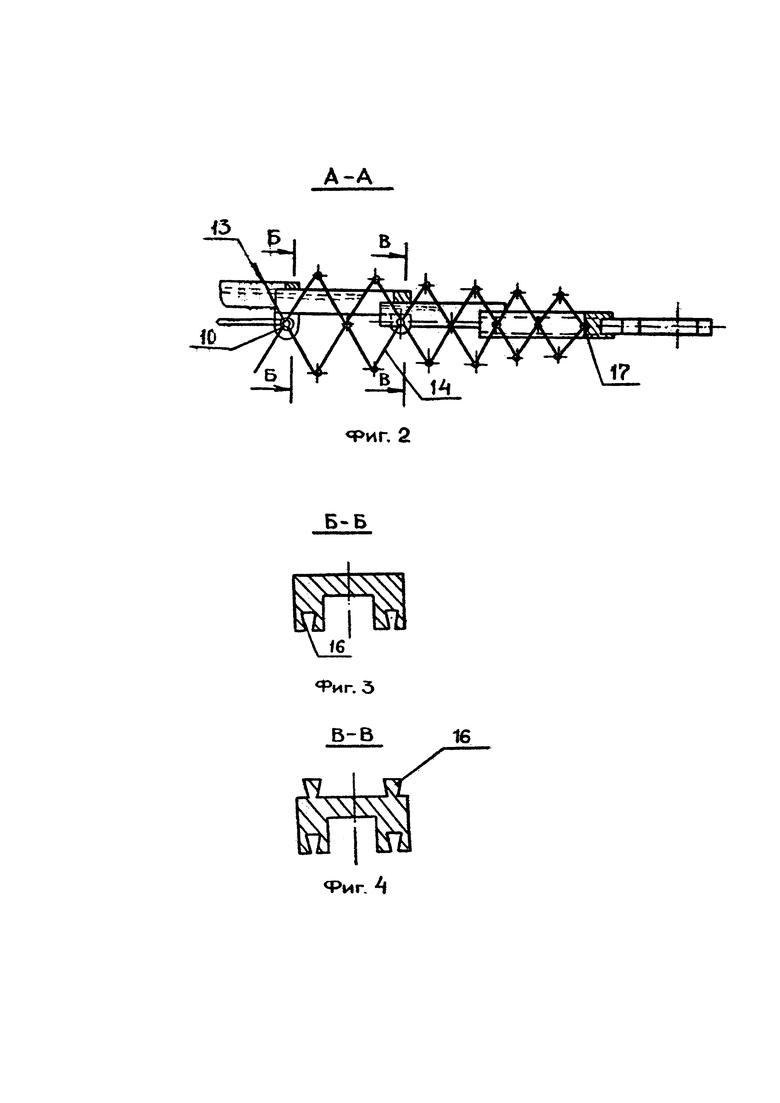
Сущность изобретения пояснена чертежами, где на фиг. 1 изображен общий вид шпагового манипулятора; на фиг. 2 исполнительный орган разрез А-А, на фиг. 3 разрез Б-Б, на фиг. 4 - разрез В-В.
Манипулятор содержит проходку 1, шаровую опору с фиксатором 2, состоящую из внутреннего 3 и наружного 4 и двух средних 5, 6 сферических элементов, расположенных концентрично друг относительно друга. В шаровой опоре смонтирована труба 7, закрепленная в средних сферических элементах 5 и 6. Через трубу 7 пропущена подвижная штанга 8, имеющая на одном конце жесткозакрепленную рукоятку управления 9. Другой конец подвижной штанги 8 соединен с внутренним шарниром 10 многократного шарнирного параллелограмма 11. Подвижная штанга 8, многократный шарнирный параллелограмм 11 и захват 12 образуют исполнительный орган. Закрепленный на подвижной штанге внутренний шарнир 10 разделяет многократный шарнирный параллелограмм на ведущую часть 13 и ведомую 14. Ведущая часть 13 образована одним шарнирным параллелограммом, закрепленным на среднем сферическом элементе 5. Ведомая часть 14 образована несколькими шарнирными параллелограммами.
Многократный шарнирный параллелограмм 2 усилен раздвижным элементом жесткости, образованным пластинами 15. Пластины 15, кроме сопряженной с захватом 12, выполнены с направляющими 16 для установки пластин одна на другой, фиг. 3, 4. Крайняя пластина 15, расположена на противоположном от захвата 12 конце раздвижного элемента жесткости запрессована в прорези среднего сферического элемента 5. Остальные пластины являются подвижными и установлены одна на другой с помощью направляющих 16. На противолежащих концах подвижных пластин 15 приварены внутренние шарниры 17 многократного шарнирного параллелограмма фиг. 2. Остальные внутренние шарниры (кроме шарниров 17 и шарнира 10) оставлены незакрепленными. Таким образом параллелограммы расположенные между внутренними шарнирами 17, а также между шарниром 17 и шарниром 10, закрепленным на подвижной штанге 8 образуют звенья, количество которых равно количеству подвижных пластин 15.
Внутренний сферический элемент шаровой опоры связан с трубой 7 посредством герметизирующего сильфона 18. Другой конец трубы 7 связан с рукояткой управления 9 посредством герметизирующего сильфона 19. Средний сферический элемент 5, наружный сферический элемент 4 и внутренний сферический элемент 3 образуют со стороны исполнительного органа полость 20. Средний сферический элемент 6 и внутренний сферический элемент 3 образуют со стороны рукоятки управления 9 полость 21. Полости 20 и 21 заполнены экранирующим веществом, в качестве которого могут быть использованы порошки графита, иридия или проточная вода.
Манипулятор работает следующим образом: захват 12 манипулятора получает качательные движения от рукоятки управления 9 через подвижную штангу 8, качающуюся вместе с трубой 7 в шаровой опоре. Герметизирующий сильфон 18 герметизирует передачу качательного движения захвату 12 от рукоятки управления 9.
При вращательном движении рукоятки управления 9 захват 12 получает вращение от рукоятки управления 9 через подвижную штангу, многократный шарнирный параллелограмм 11 при этом вместе с подвижной штангой 8 и многократным шарнирным параллелограммом осуществляют вращательное движение трубка 7 и средние сферические элементы 5 и 6 шаровой опоры.
При возвратно-поступательном движении захват 12 получает возвратно-поступательное движение от рукоятки управления 9 через подвижную штангу 8, которая перемещаясь вдоль трубы 7, перемещает внутренний шарнир 10 многократного шарнирного параллелограмма. При этом, когда рукоятку управления перемещают в сторону захвата 12, подвижная штанга 8 растягивает ведущую часть многократного шарнирного параллелограмма, сближая его внешние шарниры. Перемещение подвижной штанги передается захвату через ведомую часть 13 многократного шарнирного параллелограмма. Причем величина перемещения подвижной части штанги увеличивается в n раз, где n - число параллелограммов в ведомой части. При растяжении ведомой части 13 внутренние шарниры 17 увлекают за собой подвижные пластины 15 раздвижного элемента жесткости, которые перемещаются по направляющим 16. Герметизирующий сильфон 19 обеспечивает герметизацию возвратно-поступательного движения.
При движении рукоятки управления 9 в сторону от захвата 12 подвижная штанга 8 сжимает четырехугольный шарнирный параллелограмм, перемещая захват в обратном направлении.
Предлагаемый манипулятор обеспечивает по сравнению с прототипом увеличение зоны обслуживания за счет того, что возвратно-поступательное перемещение рукоятки управления, ограниченные размерами герметизирующего сильфона 19, увеличиваются во столько раз, во сколько число параллелограммов ведомой части больше числа параллелограммов ведущей части. Введение в исполнительный орган раздвижного элемента жесткости исключает недостаточную жесткость, присущую шарнирным параллелограммам.
ИСТОЧНИКИ ИЗВЕСТНОСТИ
1. А.С. 517482, МКИ4 B25J 1/00,
2. А.С. 963847, МКИ4 B25J 9/00,
3. А.С. 117241, МКИ4 F23D 23/00 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Шпаговый манипулятор | 2018 |
|
RU2691174C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691170C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691349C1 |
| ШПАГОВЫЙ МАНИПУЛЯТОР | 2019 |
|
RU2724735C1 |
| Шпаговый манипулятор | 2018 |
|
RU2698114C2 |
| Шпаговый манипулятор | 2018 |
|
RU2691171C1 |
| ШПАГОВЫЙ МАНИПУЛЯТОР | 2019 |
|
RU2721659C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691352C1 |
| ШПАГОВЫЙ МАНИПУЛЯТОР | 2018 |
|
RU2718771C1 |
| ШПАГОВЫЙ МАНИПУЛЯТОР | 2019 |
|
RU2718812C1 |
Изобретение относится к механическим манипуляторам, предназначенным для работы в изолированных камерах с радиоактивными веществами и исключающим непосредственный контакт человека с этими веществами. Шпаговый манипулятор содержит образованный подвижной штангой и захватом исполнительный орган, установленную в стенке камеры шаровую опору, герметизирующие сильфоны и рукоятку управления. Захват соединен с подвижной штангой многозвенным шарнирным параллелограммом, усиленным установленным вдоль его оси раздвижным элементом жесткости, который образован пластинами, связанными между собой с помощью направляющих, выполненных с возможностью установки пластин одна на другой. Изобретение обеспечивает расширение области обслуживания. 4 ил.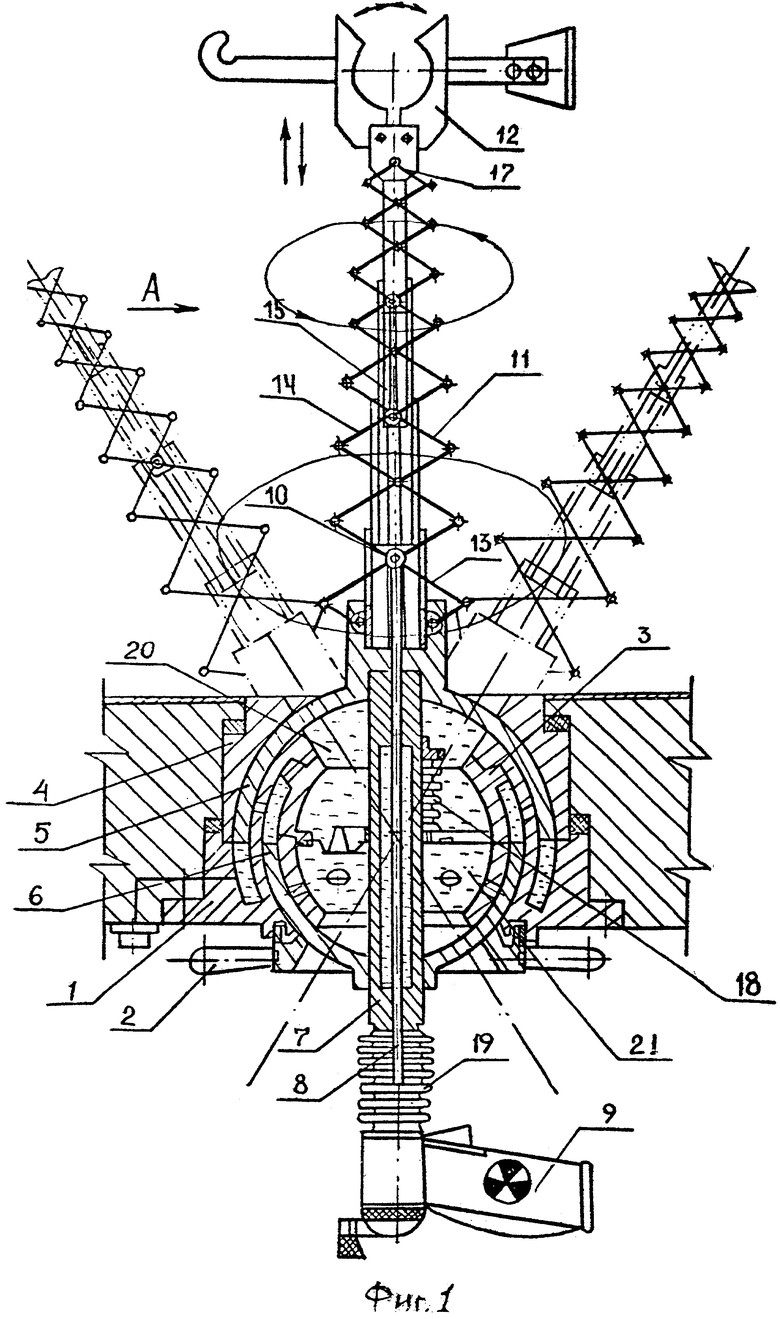
Шпаговый манипулятор, содержащий образованный подвижной штангой и захватом исполнительный орган, установленную в стенке камеры шаровую опору, герметизирующие сильфоны и рукоятку управления, причем подвижная штанга исполнительного органа пропущена через шаровую опору, герметизирующие сильфоны и связана с рукояткой управления, отличающийся тем, что захват соединен с подвижной штангой многозвенным шарнирным параллелограммом, усиленным установленным вдоль его оси раздвижным элементом жесткости, который образован пластинами, связанными между собой с помощью направляющих, выполненных с возможностью установки пластин одна на другой.
| Манипулятор шпаговый | 1958 |
|
SU117241A1 |
| Манипулятор шпагового типа | 1960 |
|
SU137594A1 |
| Манипулятор | 1981 |
|
SU963847A1 |
| US 4850779 A1, 25.07.1989 | |||
| US 2996330 A1, 15.08.1961. | |||

