Изобретение относится к области машиностроения, а именно, к защитной технике, предназначенной для работы в лабораториях, производственных и защитных боксах, исключающих воздействие агрессивных веществ на обслуживающий персонал.
Известен копирующий манипулятор, содержащий двуплечий рычаг, несущий рабочий орган. Двуплечий рычаг, в средней части выполнен со сферическим утолщением, установленном в шаровом поясе, вваренном в стенку изолированной камеры. В зазоре между сферическим утолщением и шаровым поясом установлен сепаратор с шариками. Шаровой пояс герметизирован сильфоном, приваренным к этому поясу, а с другой стороны к двуплечему рычагу (А.С. СССР №517482, МКл B25J 1/00, 1976).
Недостатком копирующие манипулятора является ограниченная область обслуживания, т.к. рабочий орган может перемещаться только по сферической поверхности одного радиуса, из-за того, что длина рабочего плеча двуплечего рычага не может быть изменена в процессе работы.
Недостатки аналога частично устранены в выбранном качестве прототипа манипуляторе, содержащем корпус, установленный в нем привод поступательного движения и захват, связанный с корпусом, посредством шарнирного многозвенника (А.С. СССР №963847, МКл B25J 9/00). Этот манипулятор имеет широкую область обслуживания по сравнению с копирующим манипулятором, благодаря возможности изменять длину шарнирного многозвенника.
Недостатком прототипа является то, что в зону обслуживания не попадает значительная часть пространства, прилегающего к корпусу. Это обусловлено большой толщиной многозвенника в сложенном состоянии из-за большого количества звеньев. Уменьшить же эту толщину за счет уменьшения сечения рычагов невозможно, т.к. снизятся прочностные характеристики многозвенника.
Целью изобретения является расширение зоны обслуживания.
Поставленная цель достигается тем, что в известном шпатовом манипуляторе, содержащим захват, привод поступательного движения и соединяющий их шарнирный многозвенник, согласно изобретению шарнирный многозвенник выполнен в виде ведущего и ведомого параллелограммов, смежные звенья которых образованы короткими плечами рычагов у ведущего параллелограмма и длинными плечами этих же рычагов у ведомого параллелограмма.
Отличительные признаки являются существенными, т.к. каждый из них необходим, а вместе с ограничительными достаточны для достижения поставленной цели. Действительно выполнение шарнирного многозвенника в виде ведущего и ведомого параллелограммов позволяет за счет сокращения количества звеньев по сравнению с прототипом значительно уменьшить толщину многозвенника в сложенном виде. А это обеспечивает уменьшение величины минимального удаления захвата от стенки камеры. Выполнение смежных звеньев параллелограммов таким образом, что образующие их рычаги разделены на короткие плечи, принадлежащие ведущему параллелограмму, и на длинные плечи, принадлежащие ведомому параллелограмму, позволяет не уменьшать максимального удаления захвата от стенки камеры при сокращении по сравнению с прототипом количества шарнирных параллелограммов. Если же смежные звенья ведущего и ведомого параллелограммов выполнять, как в прототипе, в виде равноплечих рычагов, то зона обслуживания сузится, т.к. уменьшится максимальное удаление захвата от стенки камеры.
Отличительные от прототипа признаки в исследованных аналогах не обнаружены, следовательно заявляемый захват отвечает критерию «существенные отличия».
На чертеже изображен общий вид шпатового манипулятора.
Шпатовый манипулятор содержит проходку 1, шаровую опору с фиксатором 2, состоящую из внутреннего 3, наружного 4, и двух средних 5, 6 сферических элементов, расположенных концентрично друг относительно друга. В шаровой опоре смонтирована труба 7, закрепленная в средних сферических элементах. Через трубу 7 пропущена подвижная штанга 8, на одном конце которой жестко закреплена рукоятка управления 9. Другой конец подвижной штанги 8 соединена с внутренним шарниром 10 ведущего 11 и ведомого 12 параллелограммов. Подвижная штанга 8, параллелограммы 11, 12 и захват 13 образуют исполнительный орган. Ведущий параллелограмм 11 шарнирно закреплен на среднем сферическом элементе 5. Смежные звенья параллелограммов образуют неравноплечие рычаги: которые плечи у ведущего параллелограмма 11 и длинные у ведомого 12.
Внутренний сферический элемент 3 связан с трубой 7 посредством герметизирующего сильфона 14. Другой конец трубы 7 связан с рукояткой управления 9 посредством герметизирующего сильфона 15. Средний сферический элемент 5, наружный сферический элемент 4 и внутренний сферический элемент 3 образуют со стороны исполнительного органа полость 16. Средний сферический элемент 6 и внутренний сферический элемент 3 образуют со стороны рукоятки управления 9 полость 17. Полости 16 и 17 заполнены экранирующим веществом, в качестве которого могут быть использованы порошки графита, иридия или проточная вода.
Манипулятор работает следующим образом. Перемещая рукоятку управления 9 в сторону исполнительного органа, подвижной штангой передвигают внутренний шарнир 10 от шаровой опоры. При этом сдвигаются крайние шарниры и раскрывается захват 13. Затем захват подводят к образцу. Рукоятку управления перемещают в обратном направлении и захватывают захватом 13 образец. Захват 13 получает качательное движение от рукоятки управления 9 через подвижную штангу 8, качающуюся вместе с трубой 7 в шаровой опоре. Герметизирующий сильфон 14 герметизирует передачу качательного движения захвату 13 от рукоятки управления 9.
При вращательном движении рукоятки управления 9 захват 13 получает вращательное движение через подвижную штангу 8, внутренний шарнир 10, ведомый параллелограмм 12. При этом вместе с подвижной штангой 8 ведущим 11 и ведомым 12 параллелограммами осуществляют вращательное движение трубка 7 и средние сферические элементы 5 и 6 шаровой опоры.
При возвратно-поступательном движении захват получает возвратно-поступательное движение от рукоятки управления 9 через подвижную штангу 8, которая перемещаясь вдоль трубы 7 перемещает внутренний шарнир 10. При этом, когда рукоятку управления 9 перемещают в сторону захвата 13, подвижная штанга 8 растягивает ведущий параллелограмм 11. Сближение внешних шарниров ведущего параллелограмма вызывает сближение внешних шарниров ведомого параллелограмма 12 и перемещение захвата в глубь камеры. Причем величина перемещения захвата во столько раз больше величины перемещения рукоятки управления 9, во сколько раз звено ведомого параллелограмма 12 больше звена ведущего параллелограмма 11. Герметизирующий сильфон 15 обеспечивает герметизацию возвратно-поступательного движения.
При движении рукоятки управления 9 от захвата 13 подвижная штанга сжимает ведущий параллелограмма 11, перемещая захват в обратном направлении.
Предлагаемый манипулятор по сравнению с прототипом увеличивает зону обслуживания за счет сокращения толщины шарнирного многозвенника в сжатом состоянии, благодаря уменьшению количества параллелограммов.
Кроме того сокращается количество пар трения из-за сокращения числа шарниров, а это приводит к повышению надежности и уменьшению количества загрязнений (продуктов износа), выделяемых при работе пар трения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Шпаговый манипулятор | 2018 |
|
RU2691170C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691174C1 |
| ШПАГОВЫЙ МАНИПУЛЯТОР | 2019 |
|
RU2724735C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691172C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691349C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691352C1 |
| ШПАГОВЫЙ МАНИПУЛЯТОР | 2019 |
|
RU2721659C1 |
| Динамический манипулятор | 2018 |
|
RU2691351C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691171C1 |
| ШПАГОВЫЙ МАНИПУЛЯТОР | 2018 |
|
RU2718771C1 |
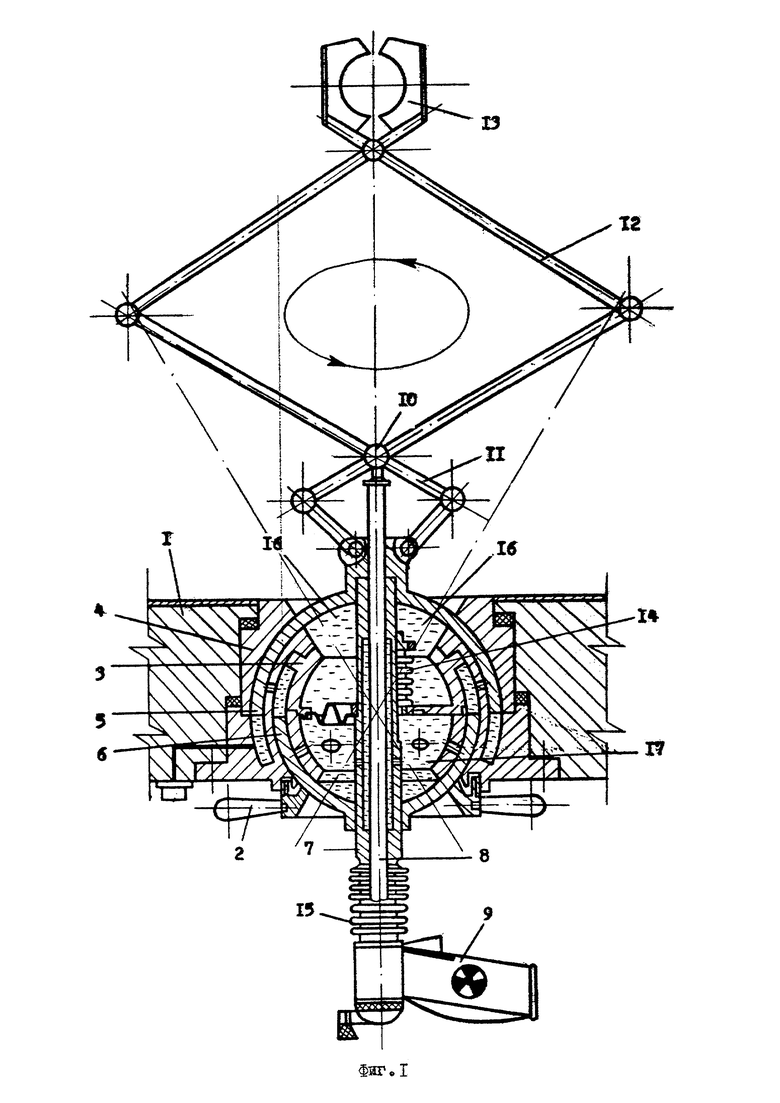
Изобретение относится к шпаговому манипулятору и может быть использовано для работы в лабораториях, производственных и защитных боксах, исключающих воздействие агрессивных веществ на обслуживающий персонал. Для расширения зоны обслуживания шпатовый манипулятор содержит захват 14, привод поступательного движения в виде подвижной штанги 8 и шарнирный многозвенник. Упомянутый многозвенник состоит из ведущего 11 и ведомого 12 параллелограммов, смежные звенья которых образованы короткими плечами рычагов у ведущего параллелограмма и длинными плечами этих же рычагов у ведомого параллелограмма. 1 ил.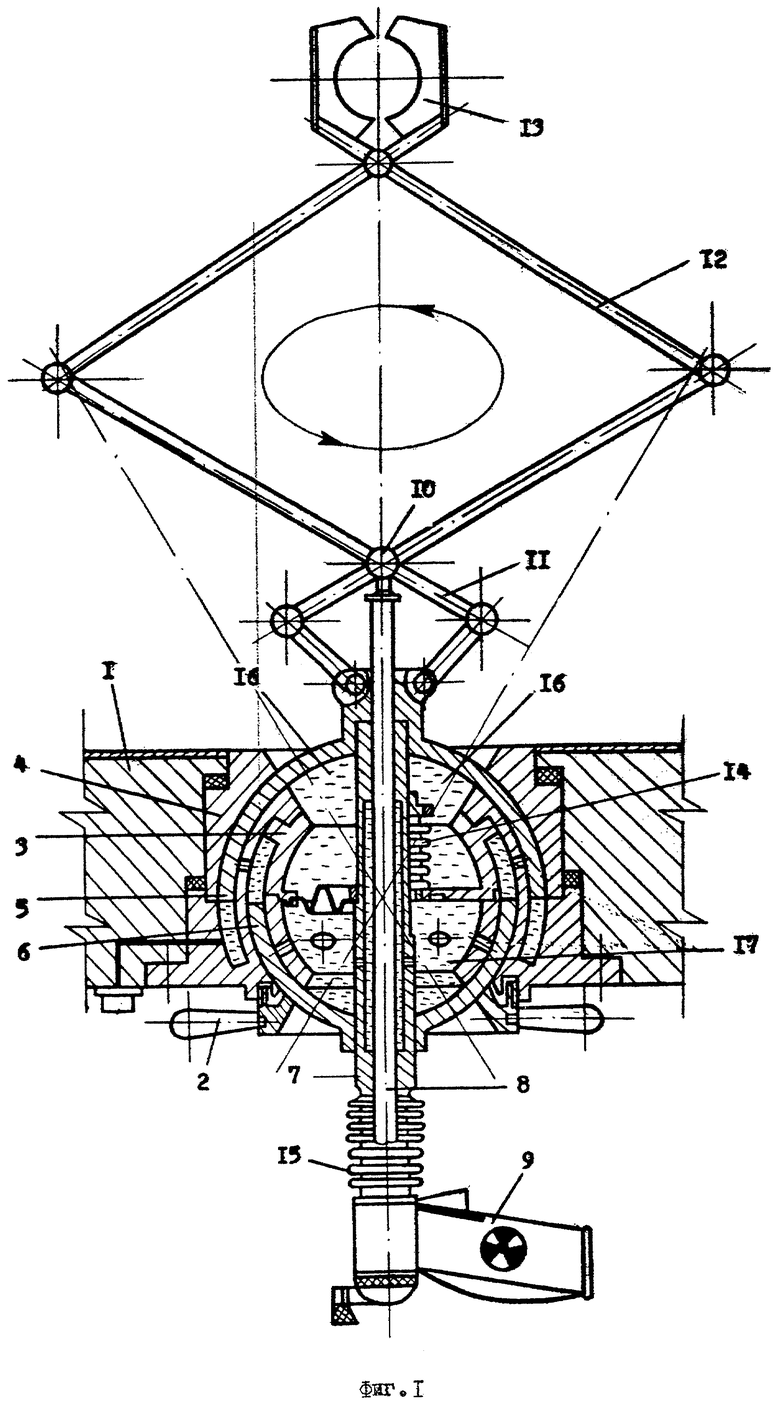
Шпаговый манипулятор, содержащий захват, привод поступательного движения и соединяющий их шарнирный многозвенник, отличающийся тем, что шарнирный многозвенник выполнен в виде ведущего и ведомого параллелограммов, смежные звенья которых образованы короткими плечами рычагов у ведущего параллелограмма и длинными плечами этих же рычагов у ведомого параллелограмма.
| Манипулятор | 1986 |
|
SU1390015A1 |
| Манипулятор | 1987 |
|
SU1530435A1 |
| Манипулятор | 1981 |
|
SU963847A1 |
| Захват манипулятора | 1978 |
|
SU963849A1 |
| Устройство для диагностики состояния механизмов | 1980 |
|
SU911166A1 |

