Изобретение относится к механическим манипуляторам, предназначенным для работы в изолированных камерах с радиоактивными веществами и исключающим непосредственный контакт человека с этими веществами.
Известен копирующий манипулятор, содержащий двуплечий рычаг, несущий рабочий орган. Двуплечий рычаг в средней части выполнен со сферическим утолщением, установленном в шаровом поясе вваренном в стенку изолированной камеры. В зазоре между сферическим утолщением и шаровым поясом установлен сепаратор с шариками. Шаровой пояс герметизирован сильфоном, приваренным к этому поясу, а с другой стороны к двуплечему рычагу (1). Недостатком копирующего манипулятора является ограниченная область обслуживания т.к. рабочий орган может перемещаться по сферической поверхности одного радиуса, и из-за того, что длина рабочего плеча двуплечего рычага не может быть изменена в процессе работы.
Известен также манипулятор, содержащий корпус, установленный в нем привод поступательного движения и захватный орган, связанный с корпусом посредством шарнирного многозвенника (2). Этот манипулятор имеет более широкую область обслуживания по сравнению с копирующим манипулятором, благодаря возможности изменять длину шарнирного многозвенника в процессе работы. Однако ему присуща относительно низкая жесткость исполнительного органа, что снижает точность фиксации образцов при осуществлении технологических операций. Низкая жесткость обусловлена конструкцией шарнирного многозвенника.
В качестве прототипа взят шпаговый манипулятор, содержащий образованный подвижной штангой и захватом исполнительный орган, установленную в стенке камеры опору, герметизирующие сильфоны и рукоятку управления, причем подвижная штанга исполнительного органа пропущена через шаровую опору, герметизирующие сильфоны и связана с рукояткой управления. Захват соединен с подвижной штангой многозвенным шарнирным параллелограммом, установленным внутри телескопического механизма (3).
Целью изобретения является расширение области обслуживания.
Поставленная цель достигается тем, что в известном шпаговом манипуляторе, содержащем образованный подвижной штангой и захватом исполнительный орган, установленную в стенке камеры шаровую опору, герметизирующие сильфоны и рукоятку управления в котором подвижная штанга исполнительного органа пропущена через шаровою опору, герметизирующие сильфоны и жестко связана с рукояткой управления, согласно изобретению захват соединен с подвижной штангой двумя параллельными многократными шарнирными параллелограммами, установленными внутри телескопического механизма, причем ведомая часть многократных шарнирных параллелограммов разделена на звенья по количеству подвижных элементов телескопического механизма.
Из отличительных от прототипа признаков в аналогах известны следующие: во-первых выполнение исполнительного механизма в виде многократного шарнирного параллелограмма с захватом (а.с. СССР №963847), во-вторых оснащение многократного шарнирного параллелограмма телескопическим механизмом в качестве элемента жесткости.
Установка же двух параллельных многократных шарнирных параллелограммов внутри телескопического элемента жесткости и разделение ведомой части многократных шарнирных параллелограммов на звенья по количеству подвижных элементов телескопического механизма в аналогах не обнаружено. Расположение двух параллельных многократных шарнирных параллелограммов внутри телескопического механизма обеспечивает передачу усилий точно по оси этого механизма, чем исключает его перекосы.
Следовательно заявляемое решение отвечает критерию «существенные отличия».
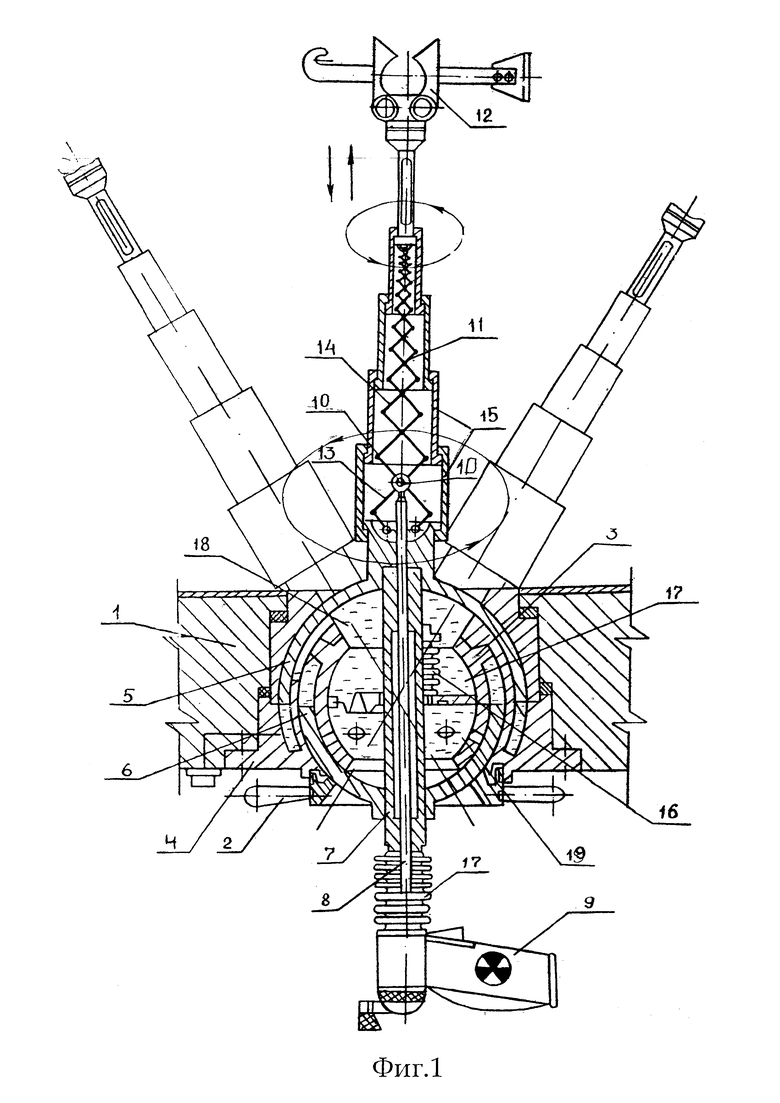
Сущность изобретения пояснена чертежом, где изображен общий вид шпагового манипулятора - фиг. 1 в разрезе, а на фотографии фиг. 2 показан его опытный образец.
Манипулятор содержит проходку 1, шаровую опору с фиксатором 2, состоящую из внутреннего 3 наружного 4 и двух средних 5, 6 сферических элементов, расположенных концентрично друг относительно друга. В шаровой опоре смонтирована труба 7, закрепленная в средних сферических элементах 5 и 6. Через трубу 7 пропущена подвижная штанга 8 имеющая на одном конце жесткозакрепленную рукоятку управления 9. Другой конец подвижной штанги 8 соединен с внутренним шарниром 10 многократными шарнирными параллелограммами 11. Подвижная штанга 8, многократные шарнирные параллелограммы 11, захват 12 образуют исполнительный орган. Закрепленный на подвижной штанге внутренний шарнир 10 разделяет многократный шарнирный параллелограмм на ведущую часть 13 и ведомую 14. Ведущая часть 13 образована одним шарнирным параллелограммом, закрепленным на среднем сферическом элементе 5. Ведомая часть 14 образована несколькими шарнирными параллелограммами.
Многократные шарнирные параллелограммы 11 установлены внутри телескопического механизма 15. Крайний элемент телескопического механизма, расположенный на противоположном от захватам 12 конце приварен к среднему сферическому элементу 5 шаровой опоры. Остальные элементы телескопического механизма установлены один в другом с возможностью продольного перемещения. Ведомая часть многократного шарнирного параллелограмма разделена на звенья, каждое из которых ограничено внутренними шарнирами 10, закрепленными на концах подвижных элементов телескопического механизма. Внутренний диаметр элементов телескопического механизма равен сумме двух плеч параллелограммов этого звена, которое расположено внутри этого элемента.
Внутренний сферический элемент шаровой опоры связан с трубой 7 посредством герметизирующего сильфона 16. Другой конец трубы 7 связан с рукояткой управления 9 посредством герметизирующего сильфона 17. Средний сферический элемент 5, наружный сферический элемент 4 и внутренний сферический элемент 3 образуют со стороны исполнительного органа полость 18. Средний сферический элемент 6 и внутренний сферический элемент 3 образуют со стороны рукоятки управления 9 полость 19. Полости 18 и 19 заполнены экранирующим веществом, в качестве которого могут быть использованы порошки графита, иридия или проточная вода.
Манипулятор работает следующим образом: захват 12 манипулятора получает качательные движения от рукоятки управления 9 через подвижную штангу 8, качающуюся вместе с трубой 7 в шаровой опоре. Герметизирующий сильфон 16 герметизирует передачу качательного движения захвату 12 от рукоятки управления 9.
При вращательном движении рукоятки управления 9 захват 12 получает вращение от рукоятки управления 9 через подвижную штангу, многократные шарнирные параллелограммы 11, при этом вместе с подвижной штангой 8 и многократными шарнирными параллелограммами осуществляют вращательное движение трубка 7 и средние сферические элементы 5 и 6 шаровой опоры.
При возвратно-поступательном движении захват 12 получает возвратно-поступательное движение от рукоятки управления 9 через подвижную штангу 8, которая перемещаясь вдоль трубы 7, перемещает крайний внутренний шарнир 10 многократного шарнирного параллелограмма. При этом, когда рукоятку управления перемещают в сторону захвата 12, подвижная штанга 8 растягивает ведущую часть многократного шарнирного параллелограмма, сближая его внешние шарниры. Перемещение подвижной штанги передается захвату через ведомую часть 13 многократного шарнирного параллелограмма. Причем величина перемещения подвижной части штанги увеличивается в n раз, где n - число параллелограммов ведомой части. При растяжении ведомой части 13 внутренние шарниры 17 увлекают за собой подвижные элементы телескопического механизма. Герметизирующий сильфон 17 обеспечивает герметизацию возвратно-поступательного движения.
При движении рукоятки управления 9 в сторону от захвата 12 подвижная штанга 8 сжимает многократные шарнирные параллелограммы, перемещая захват в обратном направлении.
Предлагаемый манипулятор обеспечивает по сравнению с прототипом увеличение зоны обслуживания за, счет того, что возвратно-поступательное перемещение рукоятки управления, ограниченное размерами герметизирующего сильфона 17, увеличивается во столько раз, во сколько число параллелограммов ведомой части больше числа параллелограммов ведущей части. Расположение многократных шарнирных параллелограммов внутри телескопического механизма повышает жесткость.
Источники информации:
1. SU 517482 А, опубл.15.06.1976;
2. SU 963847 А, опубл. 07.10.1982;
3. RU 2691170 C1, опубл.11.06.2019 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Шпаговый манипулятор | 2018 |
|
RU2691170C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691174C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691172C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691171C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691352C1 |
| Шпаговый манипулятор | 2018 |
|
RU2698114C2 |
| Шпаговый манипулятор | 2018 |
|
RU2691349C1 |
| ШПАГОВЫЙ МАНИПУЛЯТОР | 2018 |
|
RU2718771C1 |
| ШПАГОВЫЙ МАНИПУЛЯТОР | 2019 |
|
RU2721659C1 |
| ШПАГОВЫЙ МАНИПУЛЯТОР | 2019 |
|
RU2718812C1 |
Изобретение относится к механическим манипуляторам, предназначенным для работы в изолированных камерах с радиоактивными веществами и исключающим непосредственный контакт человека с этими веществами. Шпаговый манипулятор содержит образованный подвижной штангой и захватом исполнительный орган, установленную в стенке камеры шаровую опору, герметизирующие сильфоны и рукоятку управления. Подвижная штанга исполнительного органа пропущена через шаровую опору, герметизирующие сильфоны и жестко связана с рукояткой управления. При этом захват соединен с подвижной штангой двумя параллельными многократными шарнирными параллелограммами, установленным внутри телескопического механизма. Причем ведомая часть многократных шарнирных параллелограммов разделена на звенья по количеству подвижных элементов телескопического механизма. Изобретение обеспечивает расширение области обслуживания. 2 ил.
Шпаговый манипулятор, содержащий образованный подвижной штангой и захватом исполнительный орган, установленную в стенке камеры шаровую опору, герметизирующие сильфоны и рукоятку управления, причем подвижная штанга исполнительного органа пропущена через шаровую опору, герметизирующие сильфоны и связана с рукояткой управления, отличающийся тем, что захват соединен с подвижной штангой двумя параллельными многозвенными шарнирными параллелограммами, установленными внутри телескопического механизма, причем ведомая часть многократных шарнирных параллелограммов разделена на звенья по количеству подвижных элементов телескопического механизма.
| Шпаговый манипулятор | 2018 |
|
RU2691170C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691174C1 |
| Манипулятор шпаговый | 1958 |
|
SU117241A1 |
| Манипулятор шпагового типа | 1960 |
|
SU137594A1 |
| US 4850779 A1, 25.07.1989. | |||

