УРОВЕНЬ ТЕХНИКИ
Современные транспортные средства рынка товаров массового производства могут включать в себя многообразие компонентов доступа, которые могут быть с ручным управлением или с силовым приводом, такие как двери и подъемные двери кузова. Более того, компоненты с силовым приводом могут управляться или вводиться в действие многообразием способов, в том числе, находящимися в транспортном средстве средствами управления, беспроводными средствами управления, распознаваемыми близостью и/или жестами пользователя и их комбинациями. Например, некоторые двери, например, створки подъемной двери кузова с силовым приводом на вариантах транспортного средства Ford Escape, частично могут управляться с помощью датчика движения, который выявляет конкретный жест, например, движение ступни, вместе с датчиком присутствия или близости, таким как датчик брелока для ключей.
Такие системы должны быть спроектированы надежно, чтобы избегать ложного выявления пусковых сигналов ввода в действие, например, непредумышленного ввода в действие на основании некоторого другого объекта или движения. Однако, преднамеренные жесты могут широко меняться от человека к человеку - например, так как движение ступни человека может меняться на основании разных роста, размеров ступни, обуви, подвижности, и т.д. По существу, в настоящее время такой системе тяжело приспосабливаться к широкому диапазону преднамеренных жестов ввода в действие и в достаточной мере проводить различие такого широкого диапазона преднамеренных жестов ввода в действие от ложных пусковых сигналов.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Предлагается система, содержащая компьютер в транспортном средстве, компьютер содержит процессор и память, при этом, компьютер выполнен с возможностью: определять, что пользователь расположен в пределах рабочей области для компонента доступа транспортного средства; собирать данные изображений объекта на траектории жеста для компонента доступа; сравнивать данные изображений объекта с параметрами жеста ввода в действие; и приводить в действие компонент доступа, когда сравнение идентифицирует жест ввода в действие. Система может дополнительно содержать по меньшей мере один из датчика беспроводного брелока для ключей, датчика инфракрасных лучей и датчика акустического локатора, при этом, определение, что пользователь расположен в пределах рабочей области для компонента доступа, включает в себя прием сигнала близости пользователя с по меньшей мере одного из датчика беспроводного брелока для ключей, датчика инфракрасных лучей и датчика акустического локатора. Причем которой компьютер дополнительно выполнен с возможностью: калибровать по меньшей мере одно из рабочей области, траектории жеста и параметров жеста ввода в действие под жест ввода в действие пользователя. Причем компонент доступа является задней подъемной дверью кузова транспортного средства. Причем система может дополнительно содержать исполнительный механизм задней подъемной двери кузова, при этом, приведение в действие задней подъемной двери кузова включает в себя управление исполнительным механизмом задней подъемной двери кузова. Причем система может дополнительно содержать камеру заднего вида транспортного средства, при этом, сбор данных изображений объекта на траектории жеста включает в себя ввод в действие и эксплуатацию камеры заднего вида транспортного средства. Причем компьютер дополнительно выполнен с возможностью: определять, что пользователь вышел из рабочей области, для задней подъемной двери кузова; и выводить из работы камеру заднего вида. Причем жест ввода в действие является пинающим движением пользователя.
Также предлагается способ, состоящий в том, что: определяют, что пользователь расположен в пределах рабочей области для компонента доступа транспортного средства; собирают данные изображений объекта на траектории жеста для компонента доступа; сравнивают данные изображений объекта с параметрами жеста ввода в действие; и приводят в действие компонент доступа, когда сравнение идентифицирует жест ввода в действие. Причем определение, что пользователь расположен в пределах рабочей области для компонента доступа, заключается в том, что принимают сигнал близости пользователя с по меньшей мере одного из датчика беспроводного брелока для ключей, датчика инфракрасных лучей и датчика акустического локатора. Причем способ дополнительно состоит в том, что калибруют по меньшей мере одно из рабочей области, траектории жеста и параметров жеста ввода в действие под жест ввода в действие пользователя. Причем компонент доступа является задней подъемной дверью кузова транспортного средства. Причем сбор данных изображений объекта на траектории жеста заключается в том, что вводят в действие и эксплуатируют камеру заднего вида транспортного средства. Причем способ дополнительно состоит в том, что определяют, что пользователь вышел из рабочей области, для задней подъемной двери кузова; и выводят из работы камеру заднего вида. Причем способ дополнительно состоит в том, что очищают камеру заднего вида.
Также предлагается постоянный машинно-читаемый носитель, материально воплощающий машинно-исполняемые инструкции, которые побуждают процессор выполнять операции, содержащие: определение, что пользователь расположен в пределах рабочей области для компонента доступа транспортного средства; сбор данных изображений объекта на траектории жеста для компонента доступа; сравнение данных изображений объекта с параметрами жеста ввода в действие; и приведение в действие компонента доступа, когда сравнение идентифицирует жест ввода в действие. Причем определение, что пользователь расположен в пределах рабочей области для компонента доступа, включает в себя прием сигнала близости пользователя с по меньшей мере одного из датчика беспроводного брелока для ключей, датчика инфракрасных лучей и датчика акустического локатора. Причем операции дополнительно содержат: калибровку по меньшей мере одного из рабочей области, траектории жеста и параметров жеста ввода в действие под жест ввода в действие пользователя. Причем сбор данных изображений объекта на траектории жеста включает в себя ввод в действие и эксплуатацию камеры транспортного средства. Причем операции дополнительно содержат определение, что пользователь вышел из рабочей области; и вывод из работы камеры.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
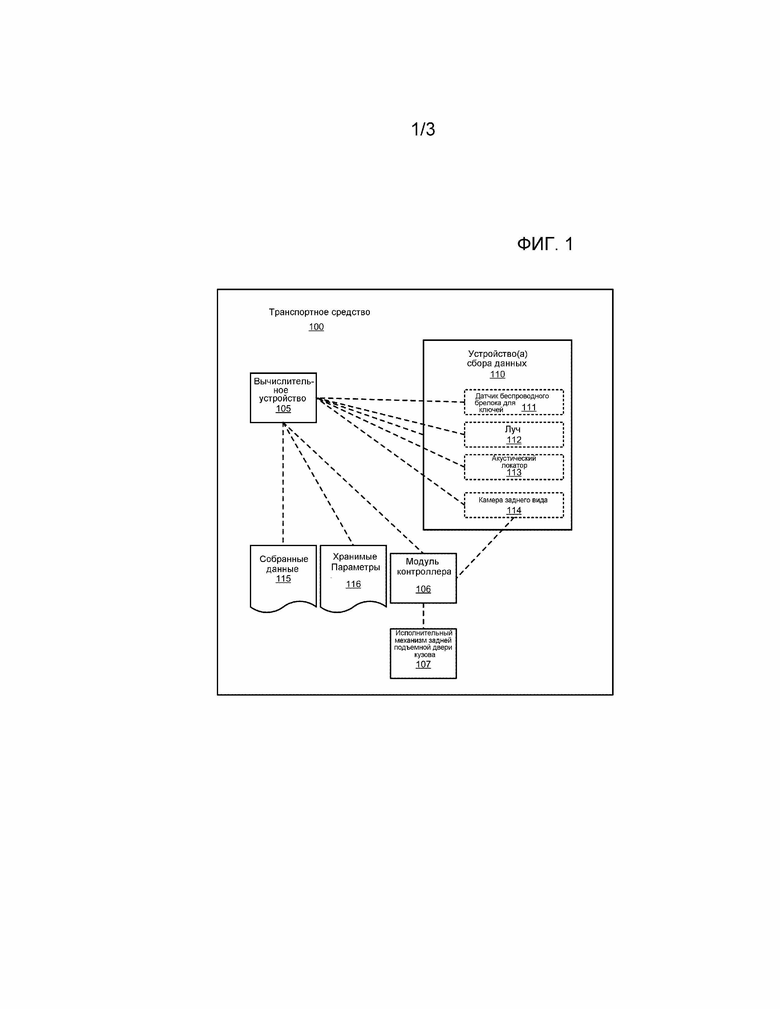
Фиг. 1 иллюстрирует примерную систему транспортного средства для управления подъемной дверью кузова транспортного средства.
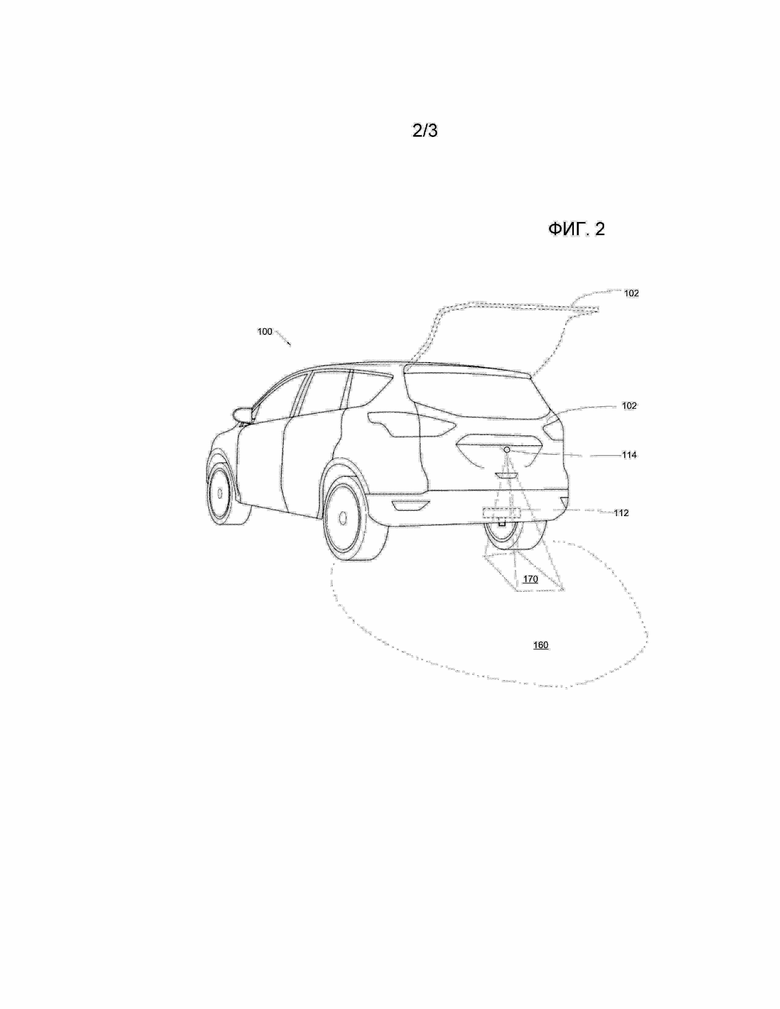
Фиг. 2 - вид сзади в перспективе примерного транспортного средства, имеющего систему транспортного средства для управления подъемной дверью кузова согласно принципам настоящего изобретения.
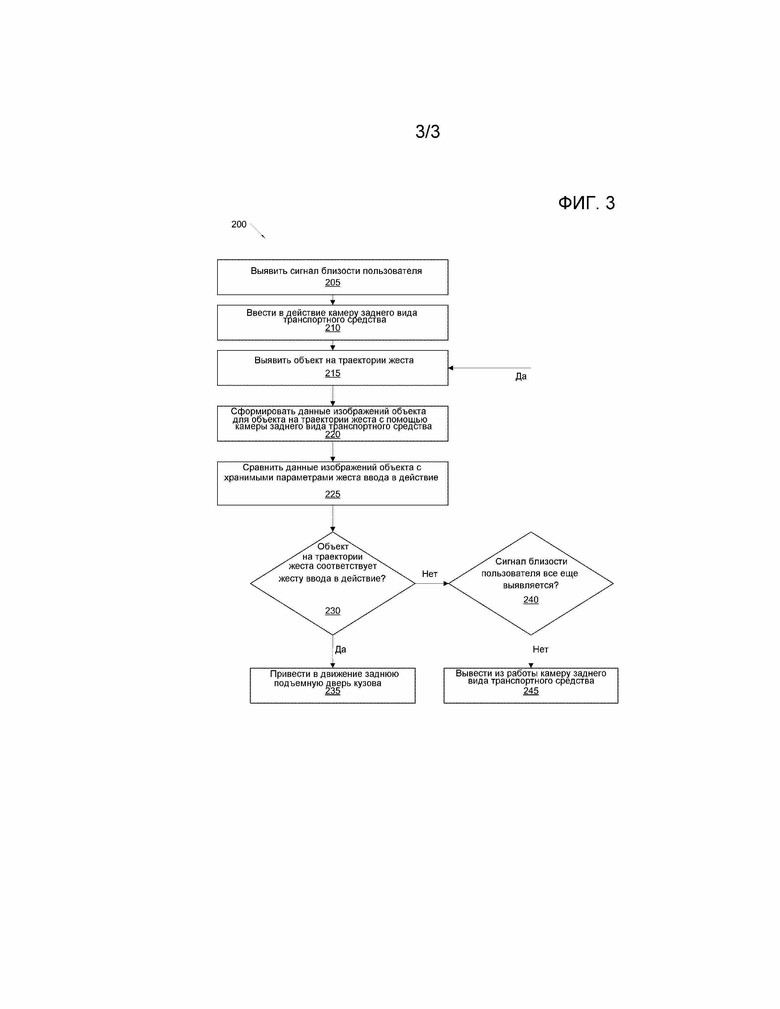
Фиг. 3 - блок-схема последовательности операций способа одной из примерных последовательностей операций, которая может быть реализована системой транспортного средства.
ПОДРОБНОЕ ОПИСАНИЕ
Фиг. 1 схематически иллюстрирует примерное транспортное средство 100, а фиг. 2 - вид сзади в перспективе примерного транспортного средства 100. Несмотря на то, что описано в материалах настоящей заявки в отношении примерного транспортного средства 100, имеющего заднюю подъемную дверь 102 кузова, примерная система может принимать многие разные формы и включать в себя многочисленные и/или альтернативные компоненты и оборудование. Должно быть понятно, что примерные проиллюстрированные компоненты не подразумеваются ограничивающими, и что могут использоваться дополнительные или альтернативные компоненты и/или реализации. Например, транспортное средство 100 может быть любым пассажирским или коммерческим транспортным средством, таким как легковой автомобиль, грузовой автомобиль, транспортное средство для активного отдыха, автобус, поезд, лодка или аэроплан, а система и способ согласно настоящему изобретению могут быть применены при автоматическом или механизированном приведении в движение многообразия компонентов доступа транспортного средства, то есть, подъемных дверей кузова, багажников, капотов, дверей, окон, и т.д.
С дополнительной ссылкой на фиг. 1, примерное транспортное средство 100 включает в себя вычислительное устройство или компьютер 105 транспортного средства, которые, как правило, включают в себя процессор и память, память включает в себя одну или более форм машинно-читаемых носителей и хранит инструкции, исполняемые процессором, для выполнения различных операций, в том числе, как раскрытые в материалах настоящей заявки. Компьютер 105 может включать в себя более чем одно вычислительное устройство, например, контроллеры, или тому подобное, включенные в транспортное средство 100 для контроля и/или управления различными компонентами транспортного средства, например, модуль 106 контроллера, блок управления двигателем (ECU), блок управления трансмиссией (TCU), и т.д. Например, один или оба из компьютера 105 и модуля 106 контроллера могут управлять исполнительным механизмом 107 задней подъемной двери кузова, механизмом с силовым приводом, работоспособным для приведения в движение задней подъемной двери 102 кузова из одного из закрытого положения и открытого положения (проиллюстрированных линиями невидимого контура на фиг. 2) в другое. Компьютер 105 транспортного средства 100 принимает информацию, например, собранные данные, с одного или более устройств 110 сбора данных, связанных с различными компонентами или условиями транспортного средства 100, например, компонентами, такими как системы датчиков присутствия или близости, системы камер, электронные системы питания, и т.д., и/или условиями, такими как скорость, ускорение, тангаж, рыскание, крен транспортного средства 100, и т.д. Компьютер в целом выполнен с возможностью для поддержания связи по шине локальной сети контроллеров (CAN) или тому подобному. Компьютер также может иметь соединение с разъемом бортовой диагностики (OBDII). Через шину CAN, OBD-II и/или другие проводные или беспроводные механизмы, компьютер может передавать сообщения в различные устройства в транспортном средстве и/или принимать сообщения с различных устройств, например, контроллеров, исполнительных механизмов, датчиков, и т.д. В качестве альтернативы или дополнительно, в случаях, где компьютер фактически содержит многочисленные устройства, шина CAN или тому подобное могут использоваться для связи между многочисленными устройствами, которые содержат компьютер транспортного средства. В дополнение, компьютер может быть выполнен с возможностью для поддержания связи с сетью, которая может включать в себя различные проводные и/или беспроводные сетевые технологии, например, сотовые, Bluetooth, проводные и/или беспроводные пакетные сети, и т.д.
Устройства 110 сбора данных могут включать в себя многообразие устройств. Например, различные контроллеры в транспортном средстве 100 могут действовать в качестве устройств 110 сбора данных, чтобы выдавать данные 115 через шину CAN, например, данные 115, относящиеся к близости объектов или пользователей к транспортному средству 100, данные изображений вокруг транспортного средства 100, и т.д. Например, устройства 110 сбора данных могут включать в себя датчик 111 беспроводного брелока для ключей и датчик 112 инфракрасных лучей, которые соответственно могут вырабатывать сигнал при конкретной близости беспроводного брелока для ключей к транспортному средству 10 или пересечении объекта или пользователя с инфракрасным лучом, испускаемым из транспортного средства 100. В еще одном примере, механизмы, такие как датчики радиолокатора, лазерного локатора, акустического локатора, и т.д., например, датчик 113 акустического локатора транспортного средства 100, могут быть включены в состав для измерения расстояния между транспортным средством 100 и другими транспортными средствами, пользователями и объектами. Устройства 110 сбора данных также могут включать в себя одно или более устройств формирования изображений для сбора данных изображений в числе данных 115, таких как камера 114 заднего вида транспортного средства 100. Кроме того, датчики или тому подобное, оборудование глобальной системы определения местоположения (GPS), и т.д., могли бы быть включены в транспортное средство и выполнены в виде устройств 110 сбора данных, чтобы выдавать данные непосредственно в компьютер 105, например, через проводное или беспроводное соединение. Устройства 110 сбора данных могли бы включать в себя устройства связи для отправки и приема информации с других транспортных средств, такой как намерения по траектории движения с транспортных средств, окружающих транспортное средство 100. Кроме того, другие устройства 110 сбора данных могли бы включать в себя датчики с измерителем ускорения. В дополнение, устройства 110 сбора данных могут включать в себя датчики для выявления положения, изменения положения, скорости изменения положения, и т.д., компонентов транспортного средства 100, таких как рулевое колесо, тормозная педаль, акселератор, рычаг переключения передач, и т.д.
Память компьютера 105, как правило, хранит собранные данные 115. Собранные данные 115 могут включать в себя многообразие данных, собранных в транспортном средстве 100. Примеры собранных данных 115 приведены выше, а более того, данные 115 обычно собираются с использованием одного или более устройств 110 сбора данных и дополнительно могут включать в себя данные, рассчитанные по ним в компьютере 105. Согласно принципам настоящего раскрытия, собранные данные 115 для транспортного средства 100 могут включать в себя сигнал близости пользователя, сформированный одним или более из датчика 111 беспроводного брелока для ключей, датчика 112 инфракрасных лучей и датчика 113 акустического локатора, а также данные изображения объекта с камеры 114 заднего вида. Вообще, собранные данные 115 дополнительно могут включать в себя любые данные, которые могут быть собраны устройством 110 сбора данных или вычислены по таким данным. По существу, собранные данные 115 могут включать в себя многообразие данных, связанных с близостью пользователей и объектов к транспортному средству 100, в том числе, данные изображений любых таких пользователей и объектов. Более того, собранные данные 115 могли бы включать в себя многообразие данных, имеющих отношение к работе и/или эксплуатационным качествам транспортного средства 100, данных, принятых с другого транспортного средства, а также данных, имеющих отношение к условиям окружающей среды, дорожным условиям, и т.д., относящимся к транспортному средству 100. В других примерах, собранные данные 115 могли бы включать в себя данные касательно требования крутящего момента, положения, скорости, ускорения, тангажа, рыскания, крена, торможения транспортного средства, наличия или отсутствия атмосферных осадков, давления в шинах, состояния шин, и т.д.
Память компьютера 105 дополнительно может хранить параметры 116. Параметр 116 в целом обуславливает управление системой или компонентом транспортного средства 100. Эти параметры могут меняться вследствие конкретного пользователя транспортного средства 10, условий окружающей среды, дорожных условий, состояния транспортного средства 100, или тому подобного. Например, хранимые параметры 116 могут включать в себя параметры, идентифицирующие рабочую область 160 задней подъемной двери кузова вокруг подъемной двери 102 кузова, траекторию 170 жеста, на которой устройство формирования изображений собирает данные изображений для выявления жеста приведения в действие, и параметры жеста приведения в действие для сравнения с собранными данными изображений.
Как правило, заключенными в инструкциях, хранимых в и выполняемых компьютером 105, могут быть один или более контроллеров, например, модуль 106 контроллера. С использованием данных, принятых в компьютере 105, например, собранных данных 115 из устройств 110 сбора данных, данных, включенных в качестве хранимых параметров 116, и т.д., модуль 106 может управлять различными системами или оборудованием транспортного средства 100. Например, модуль 106 может использоваться для ввода в действие и управления системой 114 камеры заднего вида транспортного средства 100, к примеру, согласно принципам настоящего изобретения, когда транспортное средство 100 поставлено на стоянку, или выключен двигатель, пользователь выявляется возле задней подъемной двери 102 кузова транспортного средства 100 системой распознавания приближения транспортного средства 100. В еще одном примере, модуль 106 управления также может использоваться для управления компонентом доступа транспортного средства, например, задней подъемной дверью 102 кузова с помощью приведения в действие исполнительного механизма 107 задней подъемной двери кузова, как дополнительно подробно обсуждено ниже.
Согласно принципам настоящего изобретения, компьютер 105 и/или модуль 106 контроллера могут идентифицировать пользователя транспортного средства 100 возле компонента доступа транспортного средства с избирательным силовым приводом и, по выявлению жеста ввода в действие от пользователя, вводить в действие и управлять компонентом доступа, например, из одного из открытого и закрытого положения в другое. Например, в примерном транспортном средстве 100, компьютер 105 может принимать сигнал близости пользователя в виде собранных данных 115 из одной или более систем распознавания приближения пользователя, например, датчика 111 беспроводного брелока для ключей, датчика 112 инфракрасных лучей и/или датчика 113 акустического локатора. Рабочая область 160 задней подъемной двери кузова может быть определена в числе хранимых параметров 116, и компьютер 105 может определять, что сигнал близости пользователя соответствует расположению в пределах рабочей области 160 возле соответствующего компонента доступа транспортного средства, то есть, для примерного транспортного средства 100, что пользователь находится возле задней подъемной двери 102 кузова.
С пользователем, идентифицированным в пределах рабочей области 160, один или оба из компьютера 105 и модуля 106 контроллера могут вводить в действие камеру 114 заднего вида. Компьютер 105 может сравнивать данные изображений из камеры 114 заднего вида в числе собранных данных 115 с хранимой траекторией 170 жеста, определенной среди хранимых параметров 116. По идентификации объекта на хранимой траектории 170 жеста, компьютер 105 сравнивает данные изображения объекта с хранимыми параметрами жеста ввода в действие из хранимых параметров 116. Что касается примерной траектории 170 жеста, проиллюстрированной на фиг. 2, хранимые параметры жеста ввода в действие, например, могут соответствовать данным изображений ступни, качающейся при пинающем движении по хранимой траектории 170 жеста. В этом примере, хранимые параметры жеста ввода в действие могут соответствовать обработанным данным из изображений объектов/жестов на хранимой траектории 170 жеста, что касается диапазона скоростей для пинающих движений; диапазона размеров ступни; формы/конфигурации ступни, лодыжки и нижней части ноги; и общего направления, определенного для жеста, предназначенного для ввода в действие системы. Относительно большее количество типов данных, например, в сравнении с двоичным датчиком, таким как датчик инфракрасных лучей, может обеспечивать, согласно принципам настоящего изобретения, надежную систему, которая может избегать ложных пусковых сигналов от объекта, животных или непреднамеренных жестов на траектории жеста, тем временем, приспосабливаясь к разбросу размера ступней пользователя, предпочтительного пинающего движения, высоты, подвижности, и т.д. Должно быть понятно, что система согласно принципам настоящего раскрытия может быть выполнена с возможностью для других жестов ввода в действие, например, движения руки. Более того, в некоторых вариантах осуществления, в тех случаях, когда устройства формирования изображений, такие как камера 114 заднего вида транспортного средства 100, могут быть работоспособны для автоматической очистки своих линз, хранимые параметры 116 могут включать в себя параметры для идентификации потребности в операции очистки устройства формирования изображений или камеры - например, выявления грязи на линзе. По существу, в некоторых вариантах осуществления, устройство формирования изображений может выполнять операцию очистки для обеспечения минимального уровня точности перед сбором данных изображений объекта с траектории 170 жеста.
В некоторых вариантах осуществления, данные, такие как рабочая область 160, хранимая траектория 170 жеста, любые один или более хранимых параметров ввода в действие из числа хранимых параметров 116 могут обновляться или калиброваться, например, на основе по каждому транспортному средству, по каждому компоненту доступа и/или по каждому пользователю. Например, разные пользователи транспортного средства могут быть способны устанавливать в компьютере 105 индивидуальные брелоки для ключей. После этого, компьютер 105 может быть установлен в режим калибровки, в котором камера 114 заднего вида вводится в действие для сбора данных изображений, которые пользователь демонстрирует в качестве намеренных жестов ввода в действие. Эти данные изображений могут обрабатываться для обновления хранимых параметров жеста ввода в действие согласно характеристикам и/или предпочтениям пользователя - например, для жеста ввода в действие в форме пинающего движения, хранимые параметры жеста ввода в действие могут калиброваться и/или обновляться для каждого из размера ступни, подвижности, предпочтительной скорости пинающего движения, и т.д., пользователя. В некоторых вариантах осуществления, многочисленные компоненты доступа одиночного транспортного средства могут раздельно управляться жестами, соответственные жесты могут быть разных типов, и каждый может калиброваться соответственно. Кроме того, в некоторых вариантах осуществления, в тех случаях, когда устройства формирования изображений, такие как камера 114 заднего вида транспортного средства 100, могут быть работоспособными для автоматической очистки своих линз, калибровка параметров жеста ввода в действие может включать в себя выполнение операции очистки для устройства формирования изображений или камеры, чтобы давать возможность относительно точной работы устройства формирования изображений.
Вообще, вычислительные системы и/или устройства, такие как компьютер 105 и/или модуль 106 контроллера транспортного средства 100 могут применять любые из некоторого количества компьютерных операционных систем, в том числе, но не в качестве ограничения, версии и/или разновидности операционной системы Ford SYNC®, операционной системы Microsoft Windows®, операционной системы Unix (например, операционной системы Solaris®, распространяемой корпорацией Oracle из Редвуд Шорез, штат Калифорния), операционной системы AIX UNIX, распространяемой International Business Machines из Армонка, штат Нью-Йорк, операционной системы Linux, операционных систем Mac OS X и iOS, распространяемой компанией Apple из Купертино, штат Калифорния, и операционной системы Andriod, разработанной Open Handset Alliance. Примеры вычислительных устройств включают в себя, без ограничения, компьютер или блок управления транспортного средства, компьютерную рабочую станцию, сервер, настольный компьютер, дорожный компьютер, блокнотный компьютер или карманный компьютер, или некоторые другие вычислительные систему и/или устройство.
Вычислительные устройства обычно включают в себя машинно-исполняемые инструкции, где инструкции могут быть приводимыми в исполнение одним или более вычислительных устройств, таких как перечисленные выше. Машинно-исполняемые инструкции могут компилироваться или интерпретироваться из компьютерных программ, созданных с использованием многообразия языков и/или технологий программирования, в том числе, но не в качестве ограничения, и в одиночку или в комбинации, Java™, C, C++, Visual Basic, Java Script, Perl, и т.д. Вообще, процессор (например, микропроцессор) принимает инструкции, например, из памяти, машинно-читаемого носителя, и т.д., и исполняет эти инструкции, тем самым, выполняя одну или более последовательностей операций, в том числе, одну или более из последовательностей операций, описанных в материалах настоящей заявки. Такие инструкции и другие данные могут храниться и передаваться с использованием многообразия машинно-читаемых носителей.
Машинно-читаемый носитель (также указываемый ссылкой как читаемый процессором носитель) включает в себя любой постоянный (например, материальный) носитель, который участвует в предоставлении данных (например, инструкций), которые могут считываться компьютером (например, процессором компьютера). Такой носитель может принимать многие формы, в том числе, но не в качестве ограничения, энергонезависимые носители и энергозависимые носители. Энергонезависимые носители, например, могут включать в себя оптические или магнитные диски и другую постоянную память. Энергозависимые носители, например, могут включать в себя динамическое оперативное запоминающее устройство (DRAM), которое типично составляет основную память. Такие инструкции могут передаваться посредством одной или более сред передачи, в том числе, коаксиальных кабелей, медных проводов и волоконной оптики, в том числе, проводов, которые содержат системную шину, присоединенную к процессору компьютера. Обычные формы машинно-читаемых носителей, например, включают в себя дискету, гибкий диск, жесткий диск, магнитную ленту, любой другой магнитный носитель, CD-ROM (постоянное запоминающее устройство (ПЗУ) на компакт-диске), DVD (цифровой многофункциональный диск), любой другой оптический носитель, перфокарты, бумажную ленту, любой другой физический носитель со схемой расположения отверстий, ОЗУ (оперативное запоминающее устройство, RAM), ППЗУ (программируемое ПЗУ, PROM), СППЗУ (стираемое программируемое ПЗУ, EPROM), флэш-память/ЭСППЗУ (FLASH-EEPROM (электрически стираемое программируемое ПЗУ)), любые другие микросхему или картридж памяти, или любой другой носитель, с которого компьютер может осуществлять считывание.
Базы данных, репозитории данных или другие хранилища данных, описанные в материалах настоящей заявки, могут включать в себя различные виды механизмов для хранения, осуществления доступа и извлечения различных видов данных, в том числе, иерархическую базу данных, набор файлов в файловой системе, прикладную базу данных в пользовательском формате, систему управления реляционной базой данных (RDBMS), и т.д. Каждое такое хранилище данных, обычно включено в вычислительное устройство, применяющее операционную систему компьютера, такую как упомянутые выше, и подвергается доступу через сеть любым одним или более из многообразия способов. Файловая система может быть доступна из операционной системы компьютера и может включать в себя файлы, хранимые в различных форматах. RDBMS обычно использует язык структурированных запросов (SQL) в дополнение к языку для создания, сохранения, редактирования и выполнения хранимых процедур, такому как язык PL/SQL, упомянутый выше.
В некоторых примерах, элементы системы могут быть реализованы в качестве машинно-читаемых инструкций (например, программного обеспечения) на одном или более вычислительных устройств (например, серверов, персональных компьютеров, и т.д.), хранимых на машинно-читаемых носителях, ассоциативно связанных с ними (например, дисках, устройствах памяти, и т.д.). Компьютерный программный продукт может содержать такие инструкции, хранимые на машинно-читаемых носителях, для выполнения функций, описанных в материалах настоящей заявки.
Фиг. 3 - блок-схема последовательности операций способа по примерной последовательности 200 операций, которая может быть реализована компьютером 105 и/или модулем 106 управления транспортного средства, чтобы автоматически управлять задней подъемной дверью 102 кузова транспортного средства 100.
На вершине 205 блок-схемы, компьютер 105 может принимать сигнал близости пользователя в виде собранных данных 115 с одного или более устройств 110 сбора данных, указывающий, что пользователь находится в пределах рабочей области 160 в задней части транспортного средства 100, из одной или более намеченных систем распознавания близости пользователя, в числе устройств 110 сбора данных. Например, транспортное средство 100 может включать в себя один или более датчиков 111 беспроводного брелока для ключей, действующего в области 160. При входе пользователя с беспроводным брелоком для ключей транспортного средства 100 в область 160, датчики 111 вырабатывают сигнал близости пользователя. Согласно таким собранным данным 115, на вершине 210 блок-схемы, один или оба из компьютера 105 и контроллера 106 могут вводить в действие камеру 114 заднего вида. С датчиками беспроводного брелока для ключей, типично потребляющими меньшую мощность, чем система камеры, камера 114 заднего вида используется в системе и способе согласно принципам настоящего изобретения, без необходимости постоянно питать камеру 114 заднего вида в активном режиме, даже когда транспортное средство 100 выключено.
На вершине 215 блок-схемы, с пользователем, выявленным поблизости от задней подъемной двери 102 кузова, то есть, в области 160 в задней части транспортного средства 100, и введенной в действие камерой 114 заднего вида, камера 114 заднего вида может выявлять объект, попадающий на хранимую траекторию 170 жеста. На вершине 220 блок-схемы, при попадании объекта на траекторию 170 жеста, камера 114 заднего вида собирает данные изображений объекта в виде собранных данных 115 для объекта на траектории 170 жеста и передает такие собранные данные 115 в компьютер 105. На вершине 225 блок-схемы, компьютер 105 сравнивает данные изображений объекта собранных данных 115 с хранимыми параметрами жеста ввода в действие из числа хранимых параметров 116.
На вершине 230 блок-схемы, если компьютер 105 определяет, посредством сравнения данных изображений объекта из собранных данных 115 с хранимыми параметрами жеста ввода в действие из числа хранимых параметров 116, что объект на траектории 170 жеста соответствует намеренному жесту ввода в действие пользователя, затем, на вершине 235 блок-схемы, один или оба из компьютера 105 и контроллера 106 вводят в действие исполнительный механизм 107 задней подъемной двери кузова, чтобы автоматически приводить в движение заднюю подъемную дверь 102 кузова из одного из закрытого и открытого положения в другое.
На вершине 240 блок-схемы, если компьютер 105 определяет, посредством сравнения данных изображений объекта из собранных данных 115 с хранимыми параметрами жеста ввода в действие из числа хранимых параметров 116, что объект на траектории 170 жеста не соответствует намеренному жесту ввода в действие от пользователя, компьютер обновляет сигнал близости пользователя. Если пользователь остается поблизости от задней подъемной двери 102 кузова, то есть, в области 160 в задней части транспортного средства 100, камера 114 заднего вида остается введенной в действие, и последовательность 200 операций возвращается на вершину 215 блок-схемы. Если пользователь больше не находится в области 160 в задней части транспортного средства 100, камера 114 заднего вида выводится из работы, и последовательность 200 операций заканчивается. В некоторых вариантах осуществления, последовательность операций согласно принципам настоящего изобретения дополнительно включает в себя калибровочную последовательность, посредством которой любое одно или более из рабочей области 160, хранимой траектории 170 жеста, любого одного или более из хранимых параметров жеста ввода в действие из числа хранимых параметров 116 обновляются или калибруются, например, на основе по каждому транспортному средству, по каждому компоненту доступа и/или по каждому пользователю, а также очистку линзы устройства формирования изображений или камеры до выявления объекта на траектории 170 жеста и/или перед калибровкой.
Что касается последовательностей операций, систем, способов, эвристических правил, и т.д., описанных в материалах настоящей заявки, должно быть понятно, что, хотя этапы таких последовательностей операций, и т.д., были описаны в качестве происходящих согласно определенной упорядоченной последовательности, такие последовательности операций могли бы быть осуществлены на практике с описанными этапами, выполняемыми в порядке, ином, чем порядок, описанный в материалах настоящей заявки. Кроме того, должно быть понятно, что некоторые этапы могли бы выполняться одновременно, что могли бы быть добавлены другие этапы, или что некоторые этапы, описанные в материалах настоящей заявки, могли бы быть опущены. Другими словами, описания способов в материалах настоящей заявки предоставлены с целью иллюстрации некоторых вариантов осуществления и никоим образом не должны толковаться, с тем чтобы ограничивать формулу изобретения.
Соответственно, должно быть понятно, что вышеприведенное описание подразумевается иллюстративным, а не ограничивающим. Многие варианты осуществления и применения, иные чем предоставленные примеры, были бы очевидны по прочтению вышеприведенного описания. Объем не должен определяться со ссылкой на вышеприведенное описание, но взамен, должен определяться со ссылкой на прилагаемую формулу изобретения наряду с полным объемом эквивалентов, на которые дано право такой формуле изобретения. Ожидается и подразумевается, что будущие усовершенствования будут происходить в технологиях, обсужденных в материалах настоящей заявки, и что раскрытые системы и способы будут заключены в таких будущих вариантах осуществления. В целом, должно быть понятно, что заявка является допускающей модификацию и изменение.
Все термины, используемые в формуле изобретения, подразумеваются обусловленными своими наиболее свободными расширительными толкованиями и своими обычными значениями в качестве понятных сведущим в технологиях, описанных в материалах настоящей заявки, если в материалах настоящей заявки не приведено явное указание на иное. В частности, использование форм единственного числа, «упомянутый», и т.д., должно читаться излагающим один или более из указанных элементов, если пункт формулы изобретения не передает явное ограничение иначе.
Реферат предоставлен, чтобы дать читателю возможность быстро выяснить сущность технического изобретения. Он представлен на рассмотрение с пониманием, что он не будет использоваться для толкования или ограничения объема или значения пунктов формулы изобретения. В дополнение, в вышеизложенном Подробном описании, может быть видно, что различные признаки сгруппированы вместе в различных вариантах осуществления с целью упорядочения изобретения. Способ по изобретению не должен толковаться в качестве отражающего намерение, чтобы заявленные варианты осуществления требовали большего количества признаков, чем изложено в прямой форме в каждом пункте формулы изобретения. Скорее, как отражает последующая формула изобретения, обладающий признаками изобретения объект заключается в менее чем всех признаках одиночного раскрытого варианта осуществления. Таким образом, последующая формула изобретения настоящим включена в Подробное описание, причем, каждый пункт формулы изобретения полагается сам на себя в качестве отдельно заявленного объекта изобретения.
Изобретение относится к системам управления компонентом доступа транспортного средства. Система для управления компонентом доступа транспортного средства содержит компьютер, выполненный с возможностью определять, что пользователь расположен в пределах рабочей области для компонента доступа транспортного средства, собирать данные изображений объекта на траектории жеста для компонента доступа, сравнивать данные изображений объекта с параметрами жеста ввода в действие. Причем параметры жеста ввода в действие включают в себя по меньшей мере одно из диапазона динамических характеристик жеста и диапазона характеристик пользователя, причем параметры жеста ввода в действие определяют множество пользовательских жестов ввода в действие. Компьютер также приводит в действие исполнительный механизм для перемещения компонента доступа между открытым и закрытым положениями, когда сравнение идентифицирует, что данные изображений объекта соответствуют одному из множества пользовательских жестов ввода в действие. Достигается безопасный доступ к транспортному средству. 3 н. и 16 з.п. ф-лы, 3 ил.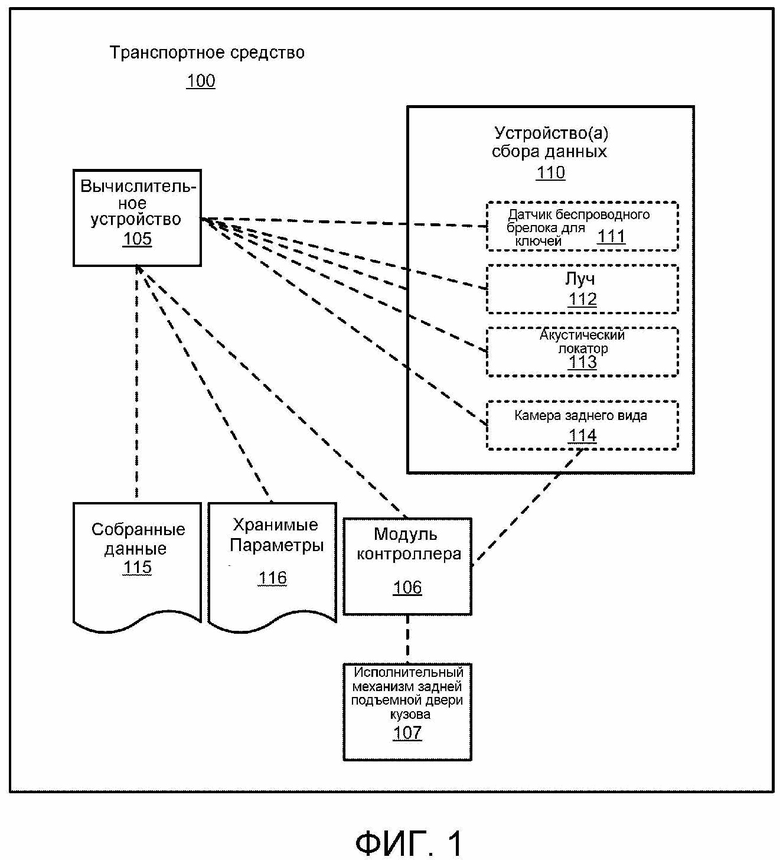
1. Система для управления компонентом доступа транспортного средства, содержащая компьютер в транспортном средстве, причем компьютер содержит процессор и память, при этом компьютер выполнен с возможностью:
определять, что пользователь расположен в пределах рабочей области для компонента доступа транспортного средства;
собирать данные изображений объекта на траектории жеста для компонента доступа;
сравнивать данные изображений объекта с параметрами жеста ввода в действие, причем параметры жеста ввода в действие включают в себя по меньшей мере одно из диапазона динамических характеристик жеста и диапазона характеристик пользователя, причем параметры жеста ввода в действие определяют множество пользовательских жестов ввода в действие; и
приводить в действие исполнительный механизм для перемещения компонента доступа между открытым и закрытым положениями, когда сравнение идентифицирует, что данные изображений объекта соответствуют одному из множества пользовательских жестов ввода в действие.
2. Система транспортного средства по п. 1, дополнительно содержащая:
по меньшей мере один из датчика беспроводного брелока для ключей, датчика инфракрасных лучей и датчика акустического локатора,
при этом определение, что пользователь расположен в пределах рабочей области для компонента доступа, включает в себя прием сигнала близости пользователя с по меньшей мере одного из датчика беспроводного брелока для ключей, датчика инфракрасных лучей и датчика акустического локатора.
3. Система транспортного средства по п. 1, в которой компьютер дополнительно выполнен с возможностью:
калибровать для пользователя по меньшей мере одно из рабочей области, траектории жеста и параметров жеста ввода в действие.
4. Система транспортного средства по п. 1, в которой компонент доступа является задней подъемной дверью кузова транспортного средства.
5. Система транспортного средства по п. 4, дополнительно содержащая камеру заднего вида транспортного средства, при этом сбор данных изображений объекта на траектории жеста включает в себя ввод в действие и эксплуатацию камеры заднего вида транспортного средства.
6. Система транспортного средства по п. 1, в которой компьютер дополнительно выполнен с возможностью:
определять, что пользователь вышел из рабочей области, для задней подъемной двери кузова; и
выводить из работы камеру заднего вида.
7. Система транспортного средства по п. 1, в которой жест ввода в действие является пинающим движением пользователя.
8. Способ управления компонентом доступа транспортного средства, состоящий в том, что:
определяют, что пользователь расположен в пределах рабочей области для компонента доступа транспортного средства;
собирают данные изображений объекта на траектории жеста для компонента доступа;
сравнивают данные изображений объекта с параметрами жеста ввода в действие, причем параметры жеста ввода в действие включают в себя по меньшей мере одно из диапазона динамических характеристик жеста и диапазона характеристик пользователя, причем параметры жеста ввода в действие определяют множество пользовательских жестов ввода в действие; и
приводят в действие исполнительный механизм для перемещения компонента доступа между открытым и закрытым положениями, когда сравнение идентифицирует, что данные изображений объекта соответствуют одному из множества пользовательских жестов ввода в действие.
9. Способ по п. 8, в котором определение, что пользователь расположен в пределах рабочей области для компонента доступа, заключается в том, что принимают сигнал близости пользователя с по меньшей мере одного из датчика беспроводного брелока для ключей, датчика инфракрасных лучей и датчика акустического локатора.
10. Способ по п. 8, дополнительно состоящий в том, что:
калибруют для пользователя по меньшей мере одно из рабочей области, траектории жеста и параметров жеста ввода в действие.
11. Способ по п. 8, в котором компонент доступа является задней подъемной дверью кузова транспортного средства.
12. Способ по п. 11, в котором сбор данных изображений объекта на траектории жеста заключается в том, что вводят в действие и эксплуатируют камеру заднего вида транспортного средства.
13. Способ по п. 12, дополнительно состоящий в том, что:
определяют, что пользователь вышел из рабочей области, для задней подъемной двери кузова; и
выводят из работы камеру заднего вида.
14. Способ по п. 12, дополнительно состоящий в том, что:
очищают камеру заднего вида.
15. Компьютер, выполняющий инструкции, хранящиеся на постоянном компьютерно-читаемом носителе, которые побуждают процессор выполнять операции, содержащие:
определение, что пользователь расположен в пределах рабочей области для компонента доступа транспортного средства;
сбор данных изображений объекта на траектории жеста для компонента доступа;
сравнение данных изображений объекта с параметрами жеста ввода в действие, причем параметры жеста ввода в действие включают в себя по меньшей мере одно из диапазона динамических характеристик жеста и диапазона характеристик пользователя, причем параметры жеста ввода в действие определяют множество пользовательских жестов ввода в действие; и
приведение в действие исполнительного механизма для перемещения компонента доступа между открытым и закрытым положениями, когда сравнение идентифицирует, что данные изображений объекта соответствуют одному из множества пользовательских жестов ввода в действие.
16. Компьютер по п. 15, в котором определение, что пользователь расположен в пределах рабочей области для компонента доступа, включает в себя прием сигнала близости пользователя с по меньшей мере одного из датчика беспроводного брелока для ключей, датчика инфракрасных лучей и датчика акустического локатора.
17. Компьютер по п. 15, материально воплощающий машинно-исполняемые инструкции, которые побуждают процессор выполнять операции, дополнительно содержащие:
калибровку для пользователя по меньшей мере одного из рабочей области, траектории жеста и параметров жеста ввода в действие.
18. Компьютер по п. 17, в котором сбор данных изображений объекта на траектории жеста включает в себя ввод в действие и эксплуатацию камеры транспортного средства.
19. Компьютер по п. 18, материально воплощающий машинно-исполняемые инструкции, которые побуждают процессор выполнять операции, дополнительно содержащие:
определение, что пользователь вышел из рабочей области; и
вывод из работы камеры.
| US 2011242303 A1, 06.10.2011 | |||
| US 2014156112 A1, 05.06.2014 | |||
| DE 102012012664 A1, 24.12.2013 | |||
| DE 102009025212 A1, 01.04.2010 | |||
| US 7366137 B2, 29.04.2008. |

