Изобретение относится к способу и устройству для контроля шин для колес транспортного средства.
Изобретение также относится к способу для оценки положения центра шины для колес транспортного средства.
Настоящее изобретение находится в области операций контроля, выполняемых над шинами, предпочтительно формованными и вулканизированными, приспособленного для проверки, что они отвечают требованиям технических условий на проектирование и, в частности, для выявления возможных наружных дефектов (на радиально внешней и/или радиально внутренней поверхностях) и/или дефектов внутри конструкции шины и, таким образом, для предоставления отвечающим требованиям шинам возможности отправляться на хранение, а дефектным шинам возможности списываться в расход.
Шина для колес транспортного средства типично содержит каркасную структуру, профилированную согласно по существу тороидальной конфигурации, содержащую по меньшей мере один каркасный слой, имеющий соответственно противоположные краевые участки. Последние зацеплены на соответственных кольцевых фиксирующих структурах, каждая из которых в большинстве случаев сформирована по меньшей мере одной по существу круговой кольцевой вставкой, называемой «сердечником борта шины», на которую как правило наложена по меньшей мере одна наполняющая вставка, сужаясь радиально от оси вращения. Кольцевые фиксирующие структуры скомпонованы в зонах, обычно определяемых названием «борта». Борта имеют внутренний диаметр, по существу соответствующий так называемому «посадочному диаметру» шины на соответственном монтажном ободе. Шина также содержит коронную структуру, содержащую по меньшей мере один брекерный пояс, скомпонованный в положении радиально снаружи каркасного слоя относительно оси вращения шины и беговой пояс шины радиально снаружи брекерного пояса. Продольные и поперечные канавки типично профилированы в беговом поясе шины, выполненном с возможностью определять требуемый рисунок протектора. Между беговым поясом шины и брекерным поясом(ами) может быть так называемый «подслой», сделанный из эластомерного материала, имеющего свойства, пригодные для обеспечения стабильного соединения брекерного пояса(ов) с самим беговым поясом шины. Шина также содержит пару так называемых боковин, сделанных из эластомерного материала, которые представляют собой внешние в осевом направлении поверхности шины, относительно средней плоскости, перпендикулярной оси вращения этой же шины. Например, боковины представляют собой внешние в осевом направлении поверхности относительно кольцевых фиксирующих структур, каркасного слоя(ев), брекерного пояса(ов) и возможно по меньшей мере одного участка бегового пояса шины. В «бескамерных» шинах, в радиально внутреннем положении относительно каркасного слоя, есть по меньшей мере один слой эластомерного материала, обычно называемый «гермослоем», имеющий воздухонепроницаемые характеристики и, как правило, продолжающийся от одного борта до другого.
Производственные циклы шины предусматривают, что, после процесса сборки, в котором различные конструктивные элементы самой шины изготавливаются и/или собираются, собранные сырые шины переносятся на линию формовки и вулканизации, где выполняется процесс формовки и вулканизации, приспособленный для определения конструкции шины согласно требуемым геометрии и рисунку протектора.
Термин «эластомерный материал» подразумевается указывающим состав, содержащий по меньшей мере один эластомерный полимер и по меньшей мере один армирующий наполнитель. Такой состав также может содержать добавки, например, подобные перекрестно-сшивающему агенту и/или пластификатору. Благодаря наличию перекрестно-сшивающего агента, такой материал может перекрестно сшиваться посредством нагревания, с тем чтобы формировать конечное готовое изделие.
Термин «сырая шина» подразумевается указывающим шину, полученную из процесса сборки, и еще не формованную и не вулканизированную.
Термин «готовая шина» подразумевается указывающим готовую шину, полученную из процесса сборки, и впоследствии формованную и вулканизированную.
Термин «шина» подразумевается указывающим готовую шину или сырую шину.
Термин «модель» шины подразумевается указывающим набор геометрических характеристик, которые отличают шину, другими словами, например, ширину бегового пояса шины, высоту боковин, посадочный диаметр и/или наружный диаметр.
Термины «осевой», «в осевом направлении», «радиальный», «радиально», «круговой» и «по окружности» используются по отношению к шине.
В частности, термины «осевой» и «в осевом направлении» подразумеваются в качестве реперов/величин, размещенных/измеренных или продолжающихся в направлении по существу параллельном оси вращения шины.
Термины «радиальный» и «радиально» подразумеваются в качестве реперов/величин, размещенных/измеренных или продолжающихся в направлении, которое пересекает ось вращения шины и лежит в плоскости, перпендикулярной такой оси вращения.
Термины «круговой» и «по окружности» подразумеваются в качестве реперов/величин, размещенных/измеренных или продолжающихся вдоль окружности, развертывающейся вокруг оси вращения шины.
Термин «осевая половина шины» подразумевается указывающим половину шины, разграниченную осевой средней плоскостью, перпендикулярной оси вращения шины и равноудаленной от бортов самой шины.
Термин «по меньшей мере одна осевая половина шины» подразумевается указывающим целую половину, как определено выше, плюс, возможно, дополнительную часть другой половины, которая продолжается в осевом направлении от вышеупомянутой средней плоскости.
Термины «нижний», «верхний», «низкий», «высокий», «выше» идентифицируют относительное положение элемента, например, подобного компоненту шины, шине, устройству, приспособлению, и т.д., относительно земли или одного из упомянутых элементов относительно другого элемента.
Термин «двумерное изображение» подразумевается указывающим цифровое изображение, состоящее из матрицы пикселей, в которой каждый пиксель связан с парой координат k,l (представляющих собой строчные и столбцовые индексы матрицы) и значения величины, например, аналогичной интенсивности серого или цвету пикселя либо расстоянию пикселя от заданной точки.
Термин «вид сбоку» относительно шины подразумевается указывающим вид, который дает возможность содержать по меньшей мере боковину и/или борт и/или плечевую часть шины. Предпочтительно, он означает вид, по существу по оси вращения шины.
В процессе производства, шины подвергаются операциям контроля, для того чтобы проверять возможное наличие дефектов и/или ненормальностей изготовления.
EP 2390621 раскрывает устройство проверки внешнего вида шин, содержащее поворотный стол и набор камер, приспособленных для получения изображения соответственных областей внутренней поверхности шины, во время вращения шины на поворотном столе. Влияния возможного неправильного выравнивания между центром шины и осью вращения поворотного стола устраняются автоматически, из изображений, полученных во время вращения шины, посредством пригодной обработки самих изображений.
EP 2711693 раскрывает способ для выявления выпуклого дефекта на контактной поверхности шины, содержащей элементы рисунка протектора. Такой способ содержит получение двумерных изображений области шины посредством облучения протектора шины щелевым световым пучком во время вращения шины на поворотном столе. Полученные изображения подвергаются различным этапам обработки, в том числе, этапу устранения влияний эксцентиситета вследствие неправильного выравнивания между центром шины и осью вращения поворотного стола.
Заявитель обнаружил, что операции контроля могут выполняться на пригодных станциях контроля, которые могут содержать поворотный стол, на котором шина вынуждена вращаться относительно пригодных устройств получения изображений, приспособленных для получения изображений поверхности шины для всей окружности шины. На таких станциях, в целях точного получения изображений, важно, чтобы центр шины был центрирован относительно оси вращения поворотного стола.
Заявитель обратил внимание, что способы, описанные в EP 2390621 и EP 2711693 для борьбы с неправильным выравниванием между осью вращения шины и осью вращения поворотного стола, основаны на апостериорной коррекции неправильного выравнивания. В частности, такие способы предусматривают получение изображений шины, в то время как она вращается на поворотном столе, анализ полученных изображений для определения наличия возможного неправильного выравнивания между центром шины и осью вращения стола и обработку полученных изображений для апостериорной коррекции влияний такого неправильного выравнивания на такие изображения.
Заявитель осознал, что при с таким типом апостериорной коррекции есть риск, особенно в случае использования камер с ограниченными глубиной поля и/или полем обзора, что, при наличии неправильного выравнивания между центром шины и осью вращения стола, полученные изображения не сфокусированы надлежащим образом и/или не расположены правильно в поле обзора камеры. Это может компрометировать точность и надежность обработки, выполняемой над такими изображениями.
Более того, в цехах, которые выпускают большое количество разных моделей шин, Заявитель обнаружил, что для того чтобы выполнять точные операции контроля, способные выявлять даже те дефекты, которые очень малы и/или расположены в областях (например, радиально внутренней поверхности) шины, к которым затруднен доступ устройствами получения изображений, необходимо, чтобы устройства, используемые для получения изображений, когда шина вращается на поворотном столе, были расположены как можно ближе к таким областям. Это необходимо для того, чтобы обеспечивать получение точных изображений, с высоким разрешением и сфокусированных надлежащим образом, одновременно избегая выполнения неуместных маневров, которые могли бы повредить сами устройства. В частности, Заявитель обнаружил, что расположение таких устройств получения изображений должно точно настраиваться согласно геометрическим характеристикам конкретной модели шины, подвергаемой контролю, например, с тем чтобы учитывать более или менее закругленные боковины, более или менее резко выраженную высоту боковин, и тому подобное.
В таком контексте, в котором устройства получения изображений расположены в положениях, очень близких к шине, а пространства для маневрирования устройств весьма ограничены, вышеупомянутые технологии апостериорной коррекции неправильного выравнивания между осями вращения шины и поворотного стола сопряжены с риском. Действительно, в случае неправильного выравнивания, есть риск, что шина, во время вращения поворотного стола, могла бы столкнуться с устройствами получения изображений.
Заявитель осознал, что вышеприведенные проблемы могут быть преодолены благодаря решению, которое дает возможность априорно определять возможное неправильное выравнивание между осью вращения шины и осью вращения поворотного стола и, в случае неправильного выравнивания, выравнивать ось вращения шины с осью вращения поворотного стола, до вращения шины на таком столе в целях получения изображений для контроля.
Точнее, Заявитель обнаружил, что такие проблемы могут быть преодолены благодаря процедуре центрирования, приспособленной для выравнивания оси вращения шины с осью вращения поворотного стола, которая содержит оценку положения оси вращения шины. Такая оценка выполняется посредством получения, согласно виду сбоку, изображения шины с боковиной, уложенной на опорную часть поворотного стола, и обработки изображения, полученного таким образом. Обработка изображения содержит: определение кумулятивного распределения вероятностей, которое комбинирует распределения вероятностей, указывающие вероятность того, что, для соответственных направлений анализа изображения, центр шины расположен на возможных осях симметрии, перпендикулярных таким направлениям анализа.
В соответствии с его первым аспектом, изобретение относится к способу для контроля шин для колес транспортного средства, каждая шина имеет ось вращения.
Предпочтительно, предусмотрена подача шины, подлежащей контролю, на станцию контроля, с боковиной шины, уложенной на опорную часть поворотного стола, в котором опорная часть лежит в плоскости, и поворотный стол имеет ось вращения, перпендикулярную упомянутой плоскости.
Предпочтительно, предусмотрено выполнять операцию центрирования, приспособленную выравнивать, в упомянутой плоскости, ось вращения шины с осью вращения поворотного стола.
Предпочтительно, операция центрирования содержит идентификацию, в упомянутой плоскости, оси вращения шины.
Предпочтительно, идентификация оси вращения шины содержит а) получение, согласно виду сбоку, изображения шины, уложенной на упомянутую опорную часть поворотного стола.
Предпочтительно, идентификация оси вращения шины содержит b) определение, в полученном изображении, количества n направлений анализа, α1, α2,..αi,.. αn, пересекающихся в одной выбранной центральной точке, причем n и i - целые числа, n>1 и 1 ≤ i ≤ n;
Предпочтительно, идентификация оси вращения шины содержит, в c), для каждого направления анализа αi,:
c1) определение, в полученном изображении, количества m возможных осей симметрии, si1, si2,.. sij,.. sim, перпендикулярных направлению анализа, αi, где m и j - целые числа, причем m>1 и 1 ≤ j ≤ m, и
c2) расчет уровня симметрии изображения относительно каждой из упомянутых возможных осей симметрии, si1, si2,.. sij,.. sim, в котором упомянутый уровень симметрии является указывающим вероятность того, что центр шины находится на соответственной возможной оси симметрии, si1, si2,.. sij,.. sim;
c3) определение распределения вероятностей, Pαi, указывающего отклонение упомянутого уровня симметрии вдоль упомянутого направления анализа, αi.
Предпочтительно, в d), центр шины определяется на основе кумулятивного распределения вероятностей, Pmerged, полученного посредством комбинирования распределений вероятностей, Pαi, рассчитанных для упомянутых направлений анализа, α1, α2,..αi,.. αn.
Предпочтительно, в e), ось вращения шины идентифицируется на оси, которая проходит через упомянутый определенный центр, и перпендикулярна упомянутой плоскости.
Заявитель считает, что способ контроля согласно изобретению, идентифицирующий ось вращения шины на основе изображения, взятого согласно виду сбоку шины (другими словами, на основе изображения сбоку шины, которое может быть получено с неподвижным поворотным столом), дает возможность априори определять возможное неправильное выравнивание между осью вращения шины и осью вращения поворотного стола и, в случае неправильного выравнивания, выравнивать ось вращения шины с осью вращения поворотного стола, до приведения шины во вращение на таком столе, в целях получения изображений для контроля.
Это дает возможность создать автоматизированную систему промышленного масштаба для контроля шин, собранных/изготовленных на любом промышленном предприятии, в том числе, в цехах, которые производят большое количество моделей шин, даже моделей, которые сильно отличаются друг от друга, удовлетворяющую требованиям, кратко изложенным выше, что в особенности касается точности, надежности и безопасности операций контроля, проводимых над шинами при вращении на поворотном столе.
В соответствии со вторым его аспектом, изобретение относится к устройству для контроля шин для колес транспортного средства, каждая шина имеет ось вращения.
Предпочтительно, упомянутое устройство содержит по меньшей мере одну станцию контроля.
Предпочтительно, упомянутая по меньшей мере одна станция контроля содержит стол, вращающийся вокруг оси вращения, имеющий опорную часть, выполненную с возможностью принимать и поддерживать боковину шины, опорная часть лежит в плоскости, перпендикулярной оси вращения поворотного стола.
Предпочтительно, упомянутая по меньшей мере одна станция контроля содержит устройства получения изображений, приспособленные получать, согласно виду сбоку, изображение шины, уложенной на упомянутую опорную часть поворотного стола.
Предпочтительно, упомянутая по меньшей мере одна станция контроля содержит электронный блок, выполненный с возможностью управлять действием центрирования, приспособленным выравнивать, в упомянутой плоскости, ось вращения шины с осью вращения поворотного стола.
Предпочтительно, операция центрирования содержит идентификацию, в упомянутой плоскости, оси вращения шины.
Предпочтительно, идентификация оси вращения шины содержит определение, в полученном изображении, количества n направлений анализа, α1, α2,..αi,.. αn, пересекающихся в одной выбранной центральной точке, причем n и i - целые числа, n>1 и 1 ≤ i ≤ n;
Предпочтительно, идентификация оси вращения шины содержит, для каждого направления анализа, αi,:
определение, в полученном изображении, количества m возможных осей симметрии, si1, si2,.. sij,.. sim, перпендикулярных направлению анализа, αi, где m и j - целые числа, причем m>1 и 1 ≤ j ≤ m;
расчет уровня симметрии изображения относительно каждой из упомянутых возможных осей симметрии, si1, si2,.. sij,.. sim, в котором упомянутый уровень симметрии является указывающим вероятность того, что центр шины находится на соответственной возможной оси симметрии, si1, si2,.. sij,.. sim;
определение распределения вероятностей, Pαi, указывающего отклонение, упомянутого уровня симметрии вдоль упомянутого направления анализа, αi.
Предпочтительно, идентификация оси вращения шины содержит определение центра шины на основе кумулятивного распределения вероятностей, Pmerged, полученного посредством комбинирования распределений вероятностей, Pαi, рассчитанных для упомянутых направлений анализа, α1, α2,..αi,.. αn.
Предпочтительно, ось вращения шины идентифицируется на оси, которая проходит через упомянутый определенный центр, и перпендикулярна упомянутой плоскости.
В соответствии с еще одним его аспектом, изобретение имеет отношение к способу для оценки положения центра шины для колес транспортного средства.
Предпочтительно, в а) предусмотрено получать, согласно виду сбоку, изображение шины с боковиной, уложенной на упомянутую опорную часть, лежащую в плоскости.
Предпочтительно, в b) предусмотрено определять, в полученном изображении, количество n направлений анализа, α1, α2,..αi,.. αn, пересекающихся в одной выбранной центральной точке, причем n и i - целые числа, n>1 и 1 ≤ i ≤ n.
Предпочтительно, в c), для каждого направления анализа, αi, предусмотрено:
с1) определять, в полученном изображении, количество m возможных осей симметрии, si1, si2,.. sij,.. sim, перпендикулярных направлению анализа, αi, где m и j - целые числа, причем m>1 и 1 ≤ j ≤ m;
с2) рассчитывать уровень симметрии изображения относительно каждой из упомянутых возможных осей симметрии, si1, si2,.. sij,.. sim, в котором упомянутый уровень симметрии является указывающим вероятность того, что центр шины находится на соответственной возможной оси симметрии, si1, si2,.. sij,.. sim;
c3) определять распределение вероятностей, Pαi, указывающего отклонение упомянутого уровня симметрии вдоль упомянутого направления анализа, αi.
Предпочтительно, в d), положение центра шины определяется на основе кумулятивного распределения вероятностей, Pmerged, полученного посредством комбинирования распределений вероятностей, Pαi, рассчитанных для упомянутых направлений анализа, α1, α2,..αi,.. αn.
Заявитель считает, что способ, согласно настоящему изобретению, пользуясь осевой симметрией шины, дает возможность оценивать центр шины, с помощью процедуры, которая одновременно точна (предпочтительно, предлагая точность меньше миллиметра), проста и быстра. Возможность повторения процедуры также позволяет делать способ все более и более точным и надежным, относительно возможных нежелательных нарушений симметрии и помех в полученном изображении.
Заявитель также считает, что способ согласно настоящему изобретению, будучи основанным на осевой симметрии шины и анализе изображения, взятого на основании ее вида сбоку, дает возможность оценивать центр шины без необходимости делать априорные предположения о ее форме. Это преимущественно дает возможность точно оценивать центр шины, даже при наличии внутренней формы шины, которая не является идеально круглой, например, вследствие наличия возможного формовочного облоя на бортах и/или вследствие деформации, которой может подвергаться ненадутая шина, лежащая на опорной части, переменным или непредсказуемым образом.
Настоящее изобретение в по меньшей мере одном из вышеупомянутых аспектов, может иметь по меньшей мере одну из следующих предпочтительных характеристик.
Предпочтительно, упомянутое распределение вероятностей, Pαi, определяется на основе упомянутого расчета уровня симметрии изображения относительно каждой из упомянутых возможных осей симметрии, si1, si2,.. sij,.. sim.
Предпочтительно, упомянутая опорная часть поворотного стола лежит в горизонтальной плоскости.
Предпочтительно, упомянутое изображение шины, полученное на основании упомянутого вида сбоку, является двумерным изображением.
Согласно предпочтительному варианту осуществления, в d), центр шины идентифицируется посредством определения области изображения с максимальными значениями упомянутого кумулятивного распределения вероятностей, Pmerged, и расчета центра тяжести упомянутой области.
Предпочтительно, упомянутая область изображения с максимальными значениями упомянутого кумулятивного распределения вероятностей, Pmerged, соответствует области изображения, в которой кумулятивное распределение вероятностей, Pmerged, принимает значения вероятностей большие, чем пороговое значение.
Еще предпочтительнее, упомянутое пороговое значение может быть задано в виде функции максимального значения Pmerged.
Предпочтительно, в d), центр шины идентифицируется посредством выбора пикселей изображения, в которых упомянутое кумулятивное распределение вероятностей, Pmerged, принимает значения, большие чем пороговое значение, и расчета центра тяжести упомянутых пикселей.
Согласно альтернативному варианту осуществления, в d), центр шины идентифицируется посредством идентификации пикселя изображения, в котором упомянутое кумулятивное распределение вероятностей, Pmerged, имеет максимальное значение.
Согласно предпочтительному варианту осуществления, предусмотрено повторять с b) по d) заданное количество раз, большее чем или равное 1, каждый раз принимая в качестве выбранной центральной точки центр шины, оцененный на непосредственно предыдущей итерации.
Предпочтительно, на первой итерации, выбранная центральная точка соответствует центру поворотного стола.
Согласно предпочтительному варианту осуществления, на каждой итерации, кумулятивное распределение вероятностей, Pmerged, получается посредством анализа ближних возможных осей симметрии, si1, si2,.. sij,.. sim, относительно непосредственно предыдущей итерации. Это преимущественно дает возможность одновременно оптимизировать точность и вычислительную мощность.
Согласно предпочтительному варианту осуществления, на каждой итерации, кумулятивное распределение вероятностей, Pmerged, получается посредством анализа возможных осей симметрии, si1, si2,.. sij,.. sim,, в соответствии с уменьшенным размахом E, относительно непосредственно предыдущей итерации, упомянутый размах E продолжается вдоль направления анализа, αi и центрируется в выбранной центральной точке. Это преимущественно дает возможность одновременно оптимизировать точность и вычислительную мощность.
Предпочтительно, в каждой итерации, для каждого направления анализа αi идентичное количество m потенциальных осей симметрии si1, si2,.. sij,.. sim учитывается относительно непосредственно предыдущей итерации.
Предпочтительно, в каждой итерации, упомянутые потенциальные оси симметрии si1, si2,.. sij,.. sim являются равноудаленными в пределах упомянутого отклонения Е.
Предпочтительно, для каждого направления анализа, αi, и для каждой возможной оси симметрии, sij, уровень симметрии изображения относительно каждой из упомянутых возможных осей симметрии, si1, si2,.. sij,.. sim,, рассчитывается посредством анализа пикселей полученного изображения, которые расположены на противоположных сторонах изображения относительно возможной оси симметрии sij.
Согласно предпочтительному варианту осуществления, для каждого направления анализа, αi и для каждой потенциальной оси симметрии, sij, уровень симметрии изображения относительно каждой из упомянутых возможных осей симметрии, si1, si2,.. sij,.. sim, рассчитывается посредством анализа пикселей полученного изображения, которые расположены на двух противоположных сторонах изображения относительно возможной оси симметрии, sij, количество анализируемых пикселей возрастает на каждой итерации, относительно непосредственно предыдущей итерации. Это дает возможность одновременно оптимизировать точность и вычислительную мощность.
Предпочтительно, анализируемые пиксели выбираются в пределах интересующей области, определенной в пределах полученного изображения для каждой возможной оси симметрии, sij каждого направления анализа, αi.
Предпочтительно, для каждой возможной оси симметрии, sij, упомянутая интересующая область симметрична относительно упомянутой возможной оси симметрии, sij.
Предпочтительно, для каждой возможной оси симметрии, sij, каждого направления анализа, αi, упомянутая интересующая область определяется пересечением между: кольцом, имеющим внутренний и внешний радиус, наделенные размерами соответственно в качестве функции номинальных значений внутреннего и внешнего радиуса шины, и прямоугольником, имеющим главную центральную линию на направлении анализа, αI и второстепенную центральную линию на возможной оси симметрии, sij.
Предпочтительно, упомянутый прямоугольник имеет длину w вдоль направления анализа, αi, большую чем или равную наружному диаметру шины, и высоту h вдоль возможной оси симметрии, по существу равную наружному радиусу шины 2.
Предпочтительно, внутренний радиус кольца заключен между 100% и 102% номинального значения внутреннего радиуса шины. Это полезно для исключения из анализа возможных формовочного облоя на бортах.
Предпочтительно, наружный радиус кольца заключен между 100% и 102% номинального значения наружного радиуса шины. Это преимущественно дает возможность иметь более четкие переходы направления изменения уровня симметрии изображения относительно каждой из упомянутых осей симметрии.
Согласно предпочтительному варианту осуществления, в c2), расчет уровня симметрии изображения относительно каждой оси, sij, из упомянутых возможных осей симметрии, si1, si2,.. sij,.. sim, содержит расчет среднеквадратического отклонения  между интенсивностью (например, серого) пикселей изображения, которые расположены по одну сторону относительно возможной оси симметрии, sij, и интенсивностью зеркальных пикселей, расположенных на противоположной стороне изображения относительно возможной оси симметрии, sij.
между интенсивностью (например, серого) пикселей изображения, которые расположены по одну сторону относительно возможной оси симметрии, sij, и интенсивностью зеркальных пикселей, расположенных на противоположной стороне изображения относительно возможной оси симметрии, sij.
Предпочтительно, расчет уровня симметрии изображения относительно каждой из упомянутых возможных осей симметрии, si1, si2,.. sij,.. sim, содержит расчет второй производной упомянутого среднеквадратического отклонения .
Предпочтительно, расчет уровня симметрии изображения относительно каждой из упомянутых возможных осей симметрии, si1, si2,.. sij,.. sim, содержит фильтрацию второй производной.
Еще предпочтительнее, упомянутая фильтрация второй производной рассчитывается посредством установки равными нулю всех значений второй производной, которые находятся ниже порогового значения.
Предпочтительно, для каждого направления анализа, αi, если определенное распределение вероятностей, Pαi, имеет максимальное значение ниже заданного порогового значения, распределение вероятностей, Pαi, не учитывается при получении кумулятивного распределения вероятностей, Pmerged. Это преимущественно дает возможность отбрасывать недостоверные или ненадежные распределения.
В альтернативном варианте осуществления, упомянутое кумулятивное распределение Pmerged вероятностей получается посредством комбинации всех распределений вероятностей Pαi.
Предпочтительно, в а), изображение получается при неподвижном поворотном столе.
Предпочтительно, в d), координаты центра шины идентифицируются в двумерной системе координат изображения, и упомянутые координаты преобразуются в трехмерную декартову систему координат поворотного стола. В самом деле, предпочтительно, что система калибруется, и расстояние от верхней поверхности шины (боковины, обращенной вверх) узнается из устройства получения изображений (например, камеры).
Предпочтительно, операция центрирования содержит выявление отклонения, в упомянутой плоскости, между осью вращения поворотного стола и осью вращения шины.
Предпочтительно, при наличии упомянутого отклонения, операция центрирования содержит перемещение шины в упомянутой плоскости относительно оси вращения поворотного стола (который остается неподвижным), до тех пор, пока ось вращения шины по существу не выровнена с осью вращения поворотного стола.
Предпочтительно, предусмотрено перемещать шину до тех пор, пока упомянутое отклонение не уменьшено ниже заданного значения, предпочтительно меньшего, чем 1 мм, еще предпочтительнее, меньшего, чем 0,1 мм.
Предпочтительно, после операции центрирования, предусмотрено вращать поворотный стол вместе с шиной вокруг упомянутой оси вращения поворотного стола и выполнять операции контроля над упомянутой шиной, в то время как поворотный стол и шина вращаются.
Предпочтительно, устройства получения изображений содержат камеру, расположенную, с тем чтобы иметь оптическую ось, по существу совпадающую с осью вращения поворотного стола.
Предпочтительно, устройства получения изображений содержат камеру, расположенную над поворотным столом, с объективом, обращенным вниз (другими словами, в направлении шины, уложенной на опорную часть поворотного стола).
Предпочтительно, поворотный стол установлен на основании, с тем чтобы быть способным вращаться вокруг упомянутой оси вращения поворотного стола.
Предпочтительно, упомянутая по меньшей мере одна станция контроля содержит движущее устройство, выполненное с возможностью вращать поворотный стол вокруг упомянутой оси вращения.
Предпочтительно, опорная часть поворотного стола подвижна в упомянутой плоскости, относительно оси вращения поворотного стола, по двум направлениям x, y, принадлежащим упомянутой плоскости.
Предпочтительно, упомянутые два направления x, y перпендикулярны.
Предпочтительно, упомянутая по меньшей мере одна станция контроля содержит по меньшей мере один привод, функционально присоединенный к опорной части поворотного стола, чтобы перемещать упомянутую опорную часть по двум направлениям x, y, принадлежащим упомянутой плоскости.
Предпочтительно, электронный блок выполнен с возможностью управлять упомянутым по меньшей мере одним приводом, с тем чтобы перемещать опорную часть поворотного стола согласно по меньшей мере одному из упомянутых двух направлений x, y до тех пор, пока ось вращения шины по существу не выровнена с осью вращения поворотного стола.
Предпочтительно, поворотный стол содержит круговой конвейер, подвижный вдоль первого направления х из упомянутых двух направлений x, y и несущий упомянутую опорную часть.
Предпочтительно, упомянутый круговой конвейер может перемещаться на заданный ход вдоль второго направления у из упомянутых двух направлений x, y.
Предпочтительно, круговой конвейер содержит конвейерную ленту, обернутую вокруг пары роликов, при этом, верхняя поверхность конвейерной ленты определяет опорную часть.
Предпочтительно, круговой конвейер содержит множество моторизованных роликов, при этом, узел верхних поверхностей упомянутых моторизованных роликов определяет упомянутую опорную часть.
Дополнительные характеристики и преимущества настоящего изобретения станут ясны из последующего подробного описания его некоторых примерных вариантов осуществления, приведенных исключительно в качестве неограничивающих примеров, упомянутое описание делается со ссылкой на прилагаемые чертежи, на которых:
- фиг. 1 схематически показывает цех для производства шин для колес транспортного средства;
- фиг. 2 показывает радиальное полусечение шины, взятое в плоскости, которая содержит ось вращения и радиус шины;
- фиг. 3 показывает вид в перспективе станции контроля из устройства для контроля шин, принадлежащего цеху по фиг. 1;
- фиг. 4 схематически показывает элементы станции контроля по фиг. 3;
- фиг. 5 схематически показывает блок-схему последовательности операций предпочтительного варианта осуществления алгоритма, который может использоваться для выполнения способа для оценки центра шины согласно изобретению;
- фиг. 6 схематически показывает m возможных осей симметрии si1, si2,.. sij,.. sim, перпендикулярных направлению анализа αi, которые могут использоваться в алгоритме по фиг. 5;
- фиг. 7 схематически показывает интересующую область анализа, которая может использоваться в алгоритме по фиг. 5;
- фиг. 8а-8е схематически показывают результат операций, которые могут выполняться в алгоритме по фиг. 5, для определения распределения вероятностей, что центр шины расположен на пикселях изображения, лежащих на возможных осях симметрии si1, si2,.. sij,.. sim по фиг. 6;
- фиг. 9а-9е схематически показывают определение кумулятивного распределения вероятностей Pmerged, которое может быть реализовано в алгоритме по фиг. 5.
Фиг. 1 показывает цех 1 для производства шин 2 для колес транспортного средства.
Фиг. 2 показывает пример шины 2, которая может быть произведена в цеху 1.
Шина 2 имеет ось R вращения и среднюю плоскость М, перпендикулярную оси R вращения (следует обратить внимание, что на фиг. 2, положение оси R вращения относительно сечения шины 2 показано абсолютно условно и схематично). Средняя плоскость М делит шину 2 на первую осевую половину 2а и на вторую осевую половину 2b. Ради простоты иллюстрации, фиг. 2 показывает только первую осевую половину 2а шины 2, другая половина 2b является по существу зеркальной (кроме рисунка протектора, который может не быть симметричным относительно вышеупомянутой средней плоскости М).
Шина 2 по существу содержит каркасную структуру 3, имеющую один или два каркасных слоя 4a, 4b. Слой непроницаемого эластомерного материала или так называемый гермослой 5 нанесен с внутренней стороны каркасного слоя(ев) 4a, 4b. Две кольцевые фиксирующие структуры 6 (только осевая половина которой 2а показана на фиг. 2) зацеплены, в осевых противоположных положениях (относительно средней плоскости М), с соответственными краевыми кромками каркасного слоя(ев) 4a, 4b. Каждая из двух кольцевых фиксирующих структур 6 содержит так называемый сердечник 6а борта шины, несущий эластомерный наполнитель 6b в радиально внешнем положении. Две кольцевые фиксирующие структуры 6 объединены рядом с зонами, обычно идентифицируемыми названием «борта» 7 (только осевая половина которых 2а показана на фиг. 2), в которых обычно происходит зацепление между шиной 2 и соответственным монтажным ободом. Брекерная структура 8, содержащая брекерные слои 8a, 8b, нанесена по кругу вокруг каркасного слоя(ев) 4a, 4b, и беговой пояс 9 шины наложен по кругу на брекерной структуре 8. Брекерная структура 8 может содержать дополнительный слой (не показан), известный как нулевые уровни, в радиально внешнем положении относительно вышеупомянутых слоев 8a, 8b. Брекерная структура 8 может быть связана с так называемыми «подбрекерными вставками» 10, каждая размещена между каркасными слоями 4a, 4b и одной из противоположных в осевом направлении краевых кромок брекерной структуры 8. Две боковины 11, каждая продолжается от соответствующего борта 7 до соответствующей боковой кромки бегового пояса 9 шины, наложены в противоположных в осевом направлении положениях (относительно средней плоскости М) на каркасные слои 4a, 4b. Совокупность участка каждой боковины 11, находящегося рядом с соответственной боковой кромкой бегового пояса 9 шины и каждого участка бегового пояса 9 шины, находящегося рядом с соответственной боковиной 11, известно как плечо шины 2.
С конкретной ссылкой на фиг. 1, цех 1 содержит линию 13 сборки сырых шин и линию 14 формовки и вулканизации, функционально скомпонованную после линии 13 сборки по ходу движения.
В неограничивающем варианте осуществления цеха 1, проиллюстрированного на фиг. 1, линия 13 сборки содержит линию 15 сборки каркасной структуры, линию 16 сборки коронной структуры, каждая коронная структура содержит по меньшей мере брекерную структуру 8, беговой пояс 9 шины, и возможно по меньшей мере часть боковин 11, и станцию 17 профилирования и сборки.
На линии 15 сборки каркасной структуры, формовочные барабаны (не проиллюстрированы) перемещаются между разными рабочими станциями (не проиллюстрированы), выполненными с возможностью формировать, на каждом формовочном барабане, каркасную структуру 3, содержащую каркасный слой(и) 4a, 4b, гермослой 5, кольцевые фиксирующие структуры 6 и возможно по меньшей мере часть боковин 11.
Одновременно, на линии 16 сборки коронной структуры, один или более вспомогательных барабанов (не проиллюстрированы) перемещаются последовательно между разными рабочими станциями (не проиллюстрированы), выполненными с возможностью формировать коронную структуру на каждом вспомогательном барабане.
На станции 17 профилирования и сборки, каркасная структура 3, сформированная на ее собственном формовочном барабане на линии 15 сборки каркасной структуры, профилируется и устанавливается на коронную структуру, сформированную на линии 16 сборки коронной структуры.
В других не проиллюстрированных вариантах осуществления цеха 1, линия 13 сборки может быть иного типа, например, выполненной с возможностью формировать все вышеупомянутые компоненты на унифицированном формовочном барабане.
Сырые шины, собранные посредством линии 13 сборки, переносятся на линию 14 формовки и вулканизации, содержащую один или более вулканизаторов.
С линии 14 формовки и вулканизации готовые шины 2 выходят последовательно одна за другой с заданной частотой и соответствующим заданным временем производственного цикла.
После линии 14 формовки и вулканизации по ходу движения, цех 1 содержит устройство 18, выполненное с возможностью осуществлять контроль шин 2 после формовки и вулканизации.
В дополнительном или альтернативном варианте осуществления (не проиллюстрирован), цех 1 может содержать такое же устройство 18, размещенное между линией 13 сборки и линией 14 формовки и вулканизации, выполненное с возможностью осуществлять контроль сырых шин перед этапом формовки и вулканизации.
Устройство 18 для контроля шин содержит по меньшей мере одну станцию 27 контроля, где шины 2 подвергаются контролю качества, для того чтобы проверить возможное наличие дефектов согласно способам, которые будут описаны в дальнейшем. Следует обратить внимание, что, ради простоты иллюстрации, фиг. 1 показывает только одну станцию 27 контроля, даже если типично устройство 18 содержит много станций 27 контроля.
Шины 2, подлежащие контролю, последовательно одна за другой попадают в устройство 18 и последовательно проходят через станции 27 контроля вдоль по существу прямолинейного направления F продвижения.
С конкретной ссылкой на фиг. 3 и 4, каждая станция 27 контроля содержит раму 28, в которой располагается основание 34 (фиг. 4), лежащее на земле. Поворотный стол 35 установлен на основании 34, с тем чтобы быть способным поворачиваться вокруг вертикальной оси Z вращения. Поворотный стол 35 имеет по существу горизонтальную опорную часть 36, выполненную с возможностью принимать и поддерживать боковину 11 шины 2, подлежащей контролю.
В соответствии с проиллюстрированным вариантом осуществления, поворотный стол 35 содержит поворотную опору 37 (фиг. 7), размещенную над основанием 34 и связанную с основанием 34 с возможностью вращения вокруг упомянутой вертикальной оси Z вращения. Поворотная опора 37 неподвижно присоединена к валу 37А, выходящему из основания 34. Вал 37А присоединен к движущему устройству 38 (схематически проиллюстрированному на фиг. 4), установленному в основании 34 и выполненному с возможностью побуждать поворотный стол 35 вращаться вокруг упомянутой вертикальной оси Z вращения. Вертикальная ось Z вращения зафиксирована (неподвижна) относительно основания 34 и относительно земли.
Круговой конвейер 39 установлен на поворотной опоре 37. В частности, круговой конвейер 39 содержит салазки 40 (фиг. 4), определенные пластиной, снабженной, на ее нижней поверхности, парой ползунов 41 (фиг. 4). Каждый из ползунов 41 с возможностью скольжения зацеплен с соответственной направляющей 42 (фиг. 4), установленной на верхней поверхности поворотной опоры 37.
Салазки 40 несут, на их верхней поверхности, пару роликов 43, навешанных с возможностью вращения на кронштейнах, которые не проиллюстрированы и жестко присоединены к салазкам 40. Ролики 43 подвижны при вращении вокруг соответственных осей W поворота, параллельных друг другу и параллельных направляющим 42. Конвейерная лента 44 обернута вокруг пары роликов 43, чтобы определять замкнутую траекторию. Конвейерная лента 44 имеет верхнюю ветвь, верхняя поверхность которой определяет упомянутую опорную часть 36, которая, поэтому, лежит в по существу горизонтальной плоскости.
Первый привод 45 (схематически проиллюстрированный на фиг. 4) установлен на салазках 40 и функционально присоединен по меньшей мере к одному из двух роликов из пары 43, чтобы приводить его во вращение и перемещать конвейерную ленту 44 по замкнутой траектории. Ролики 43 могут побуждаться вращаться в одном направлении вращения или в противоположном направлении для формирования поступательного движения верхней ветви и опорной части 36 в первом направлении х (проиллюстрированном на фиг. 3), как в одном направлении, так и в противоположном направлении. Первое направление х лежит в горизонтальной плоскости и перпендикулярно осям W поворота. С поворотным столом 35, неподвижным в положении покоя, первое направление х выровнено с направлением F продвижения.
Второй привод 46, схематически проиллюстрированный на фиг. 4, установлен между салазками 40 и поворотной опорой 37 и выполнен с возможностью перемещать салазки 40 по направляющим 42 вдоль второго направления у (проиллюстрированного на фиг. 3), которое в горизонтальной плоскости перпендикулярно первому направлению х и параллельно осям W поворота. Поэтому, опорная часть 36 подвижна в горизонтальной плоскости согласно упомянутым двум направлениям х, у относительно вертикальной оси Z вращения, которая, с другой стороны, неподвижна относительно упомянутой опорной части 36. Перемещение опорной части 36 вдоль первого направления х может быть непрерывным и бесконечным. Перемещение опорной части 36 вдоль второго направления у ограничено полезным ходом, обеспечиваемым системой, состоящей из ползунов 41 и направляющих 42.
В другом варианте осуществления, не проиллюстрированном, вместо конвейерной ленты 44, круговой конвейер 39 содержит множество моторизованных роликов, параллельных друг другу и установленных на поворотной опоре 37. В этом случае, узел верхних поверхностей упомянутых моторизованных роликов определяет упомянутую опорную часть 36.
Устройство 47 получения изображений (схематически проиллюстрированное на фиг. 3) установлено над поворотным столом 35 и обращено на опорную часть 36. Устройство 47 получения изображений содержит камеру и множество осветительных устройств (не проиллюстрированы), размещенных на станции 27 контроля.
Камера расположена над поворотным столом 35, с объективом, обращенным вниз (другими словами, на шину 2, уложенную на опорную часть 36). Благодаря подходящей процедуре калибровки, камера имеет оптическую ось, по существу совпадающую с вертикальной осью Z вращения поворотного стола 35.
Осветительные устройства выполнены с возможностью пригодным образом освещать по меньшей мере боковину 11, плечо и борт 7 (и возможно по меньшей мере часть бегового пояса 9 шины), повернутыми вверх (другими словами, к камере). Осветительные устройства выполнены с возможностью пригодным образом также освещать задний план шины 2.
Электронный блок 48 (схематически проиллюстрированный на фиг. 3 и 4) функционально присоединен к устройству 47 получения изображений, к движущему устройству 38, к первому приводу 45 и второму приводу 46. Как подробнее описано в дальнейшем, электронный блок 48 выполнен с возможностью выявлять отклонение S между вертикальной осью Z вращения поворотного стола 35 и осью R вращения шины 2, размещенной на опорной части 36 и с возможностью управлять первым и вторым приводами 45, 46, с тем чтобы перемещать опорную часть 36 согласно первому направлению х и/или второму направлению у, в качестве функции выявленного отклонения S до тех пор, пока ось R вращения шины не выровнена с осью Z вращения поворотного стола 35.
В варианте осуществления (не проиллюстрирован), устройство 18 для контроля шин предпочтительно также содержит, перед станциями 27 контроля по ходу движения, механическую центрирующую опору, содержащую роликовый конвейер, на котором шина 2 располагается перед подачей ее на первую станцию контроля из станций 27 контроля. Такая механическая центрирующая опора выполнена с возможностью осуществлять операцию предварительного центрирования шины 2 относительно оси Z вращения поворотного стола 35, приспособленную для получения отклонения Sy вдоль второго направления у, между вертикальной осью Z вращения поворотного стола 35 и осью R вращения шины 2, например, меньшего, чем 20-25 мм (предварительное центрирование вдоль второго направления у).
Как показано на фиг. 3, каждая станция 27 контроля также содержит одну или более антропоморфных роботизированных рук 49 (в качестве примера на фиг. 3 показаны две из них), установленных над поворотным столом 35 и ограниченных рамой 28.
Оконечность каждой антропоморфной роботизированной руки 49 несет одно или более устройств 50 контроля. Антропоморфные роботизированные руки 49 определяют устройства поддержки и перемещения устройств 50. Например, устройства 50, несомые антропоморфными роботизированными руками 49, способны выполнять последовательность операций неразрушающего контроля, которые дают возможность выявлять возможные наружные дефекты (на радиально внешней и/или радиально внутренней поверхности) и/или дефекты внутри конструкции шины. Упомянутые операции контроля, например, могут быть оптического (фотография, ширография, голография, радиография, и т.д.), ультразвукового или механического типа или их комбинацией.
В качестве неисчерпывающего примера, устройства 50 могут содержать цифровые камеры с возможными источниками света с рассеянным, падающим по касательной или прямым светом, например, типа лазера или типа СИД (светоизлучающего диода, LED), выполненные с возможностью получать двумерные и/или трехмерные изображения радиально внешней и/или радиально внутренней поверхности шин 2.
При использовании и в соответствии со способом для контроля шин согласно настоящему изобретению, всякий раз, когда готовая шина 2 выходит из установки 14 вулканизации, она переносится, например, посредством конвейера, который не проиллюстрирован, в устройство 18 для выполнения ее контроля.
Затем, шина 2 подается в каждую станцию 27 контроля устройства 18.
Шина 2, не установленная на ободе (таким образом, спущенная), укладывается боковиной 11 на опорную часть 36 поворотного стола 35 станции 27 контроля. Опорная часть 36 ориентирована, так что ее первое направление х совпадает с по существу прямолинейным направлением F продвижения. Шина 2, положенная на боковину 11, имеет свою вторую осевую половину 2b прилегающей к опорной части 36, а первую осевую половину 2a, обращенной вверх.
Нахождение лежащей на боковине 11 гарантирует, что форма шины 2 всегда одинакова во время всех из испытаний, без необходимости ее накачивать. Шина 2 в состоянии покоя (спущенная) уменьшает ее вибрации относительно накаченной шины и улучшает качество операций контроля, в частности, полученных изображений. Нахождение лежащей на боковине устраняет значительные механические напряжения, которые могли бы компрометировать ее целостность и качество операций контроля. Нахождение лежащей на боковине также предоставляет возможность легкого центрирования относительно системы координат операций контроля, как описано в дальнейшем.
В этот момент, электронный блок 48 обеспечивает управление операцией центрирования, приспособленной для выравнивания, в горизонтальной плоскости х, у опорной части 36 поворотного стола 35, оси R вращения шины 2 с вертикальной осью Z вращения поворотного стола 35. Операция центрирования выполняется при неподвижном поворотном столе 35, в положении покоя, где первое направление х совпадает с направлением F продвижения. Операция центрирования прежде всего содержит оценку положения центра шины, а потому, оси R вращения шины.
Фиг. 5 показывает предпочтительный вариант осуществления алгоритма, который может использоваться для применения способа для оценки положения центра шины 2 для колес транспортного средства согласно настоящему изобретению.
В частности, со ссылкой на блок-схему последовательности операций по фиг. 5, на вершине 100 блок-схемы, алгоритм принимает входные данные, в том числе:
- изображение, предпочтительно двумерное, шины 2, уложенной на упомянутую опорную часть 36 поворотного стола 35; изображение получается сверху, согласно виду сбоку шины 2, посредством устройства 47 получения изображений;
- структуру данных с номинальными размерами внутреннего радиуса, наружного радиуса и ширины бегового пояса 9 шины у шины 2; и
- данные, полученные из вышеупомянутой процедуры калибровки, приспособленной для выравнивания оптической оси камеры устройства 47 получения изображений с вертикальной осью Z вращения поворотного стола 35.
Двумерное изображение шины 2 предпочтительно содержит боковину 11, по меньшей мере одну плечевую часть, борт 7 и, возможно, по меньшей мере часть бегового пояса 9 шины первой осевой половины 2а шины 2, обращенной вверх (другими словами, к камере).
Двумерное изображение представлено матрицей пикселей, имеющей k и l в качестве строчного и столбцового индексов, соответственно. Значение пикселей может меняться, например, по шкале уровней серого между 0 (черным) и 255 (белым).
Процедура калибровки дает возможность характеризовать геометрию оптической системы устройства 47 получения изображений и дает возможность отображать координаты точки пикселями на двумерном изображении с относительным положением в трехмерной декартовой системе координат станции 27 контроля, определенной первым направлением х, вторым направлением у и осью Z вращения поворотного стола 35. Для того чтобы делать это, необходимо знать расстояние упомянутой точки от камеры. Принимая во внимание, что алгоритм рассматривает точки боковины 11, плеча и борта 7 первой осевой половины 2а шины 2, обращенной вверх, зная высоту опорной плоскости 36 относительно камеры и ширину бегового пояса 9 шины, можно переходить с пикселей на миллиметры и обратно, для всех точек, принадлежащих плоскости боковины 11, обращенной вверх, шины 2.
Предпочтительно, изображение на входе фильтруется традиционным медианным фильтром, например, типа 3×3, для устранения шума и чтобы сделать уровни серого изображения более ровными.
На вершине 101 блок-схемы, алгоритм рассматривает, в полученном изображении, первое направление анализа, αi, из n направлений анализа, α1, α2,..αi,.. αn, которые пересекаются друг с другом в выбранной центральной точке Pc (подаваемой на входе из вершины 102 блок-схемы), где n и i - целые числа, причем n>1, а i указывает исходное целое число от 1 до n. Предпочтительно, n имеет значение больше 2. Количество n направлений анализа предпочтительно выбирается, с тем чтобы находить хороший компромисс между устойчивостью и точностью алгоритма с одной стороны и простотой вычислений с другой. Предпочтительно, n направлений анализа, α1, α2,..αi,.. αn, расположены с равным угловым интервалом. Например, m равно 12 и n направлений анализа, α1, α2,..αi,.. αn, расположены с угловым интервалом 30°. Предпочтительно, как лучше пояснено в дальнейшем, на первой итерации алгоритма, выбранная центральная точка Рс устанавливается равной центру (в пикселях) поворотного стола 35.
На вершине 103 блок-схемы, алгоритм рассматривает, в полученном изображении, для направления анализа, αi, первую возможную ось симметрии, sij, из m возможных осей симметрии, si1, si2,.. sij,.. sim, перпендикулярных направлению анализа, αi, где m и j - целые числа, причем m>1 и j указывает исходное целое число от 1 до m. Как схематически проиллюстрировано на фиг. 6, предпочтительно, m возможных осей симметрии, si1, si2,.. sij,.. sim, равноудалены в пределах размаха Е, который задан (в пикселях) вдоль упомянутого направления анализа, αi, и центрирован в выбранной центральной точке Pc. Например, как подробнее пояснено в дальнейшем, на первой итерации алгоритма, размах Е может иметь общую длину 300 пикселей и m возможных осей симметрии, si1, si2,.. sij,.. sim, могут быть разнесены на расстояние d, равное 10 пикселям (для суммарного количества 30 осей симметрии, другими словами, m=30). Значение такого размаха Е и расстояния d подаются в вершину 103 блок-схемы по фиг. 5 из вершины 104 блок-схемы. Как подробнее пояснено в дальнейшем, размах Е и расстояние d в пикселях между осями симметрии являются переменными параметрами алгоритма (другими словами, которые меняются от одной итерации до другой).
На вершине 105 блок-схемы, алгоритм определяет интересующую область 150 (ROI) в пределах полученного изображения для упомянутой рассматриваемой первой возможной оси симметрии, sij. Как схематически проиллюстрировано на фиг. 7, такая интересующая область 150 симметрична относительно возможной оси симметрии, sij, и определена пересечением между: кольцом 151, имеющим внутренний и внешний радиусы, соответственно наделенные размерами в качестве функции номинальных значений (в пикселях) внутреннего и внешнего радиусов шины (принимаемых в качестве данных на входе в вершину 100 блок-схемы), и прямоугольником 152, имеющим главную центральную линию, лежащую на направлении анализа, αi и второстепенную центральную линию, лежащую на рассматриваемой возможной оси, sij, симметрии. Предпочтительно, прямоугольник 152 имеет длину w вдоль направления анализа, αi, слегка большую (например, приблизительно на 1 или 2%), чем длина (в пикселях) наружного диаметра шины, и высоту h вдоль возможной оси симметрии, sij, по существу равную длине (в пикселях) наружного радиуса шины. Центр с прямоугольника 152 находится в точке пересечения между направлением анализа, αi, и возможной осью симметрии, sij. На фиг. 7, центр c имеет исходные координаты I,J в декартовой плоскости i, j, где i представляет собой координаты вдоль направления анализа, αi, и j - координаты вдоль возможной оси симметрии, sij.
Предпочтительно, внутренний радиус кольца 151 слегка больше (например, приблизительно на 1-2%) номинального значения (в пикселях) внутреннего радиуса шины 2.
Предпочтительно, наружный радиус кольца 151 слегка больше (например, приблизительно на 1-2%) номинального значения (в пикселях) наружного радиуса шины 2.
На вершине 106 блок-схемы, алгоритм рассчитывает уровень антисимметрии , изображения относительно рассматриваемой возможной оси симметрии, sij. В частности, уровень антисимметрии определяется посредством расчета среднеквадратического отклонения между интенсивностью In серого определенного количества р пикселей изображения, которые расположены на одной стороне изображения относительно возможной оси симметрии, sij, и интенсивностью In серого зеркальных пикселей, которые расположены на противоположной стороне изображения относительно возможной оси симметрии, sij; количество р пикселей выдается в вершину 106 блок-схемы из вершины 107 блок-схемы.
Расчет среднеквадратического отклонения, например, может быть представлен схематически следующей формулой:
где p указывает количество рассматриваемых пикселей, In указывает интенсивность серого пикселя; h и w соответственно указывают высоту и длину прямоугольника 152; I и J - координаты центра c прямоугольника 152; i и j - координаты пикселя относительно центра с прямоугольника 152 вдоль направления анализа, αi, и вдоль возможной оси симметрии, sij, соответственно. Как подробно пояснено в дальнейшем со ссылкой на вершины 113 и 116 блок-схемы, количество р рассматриваемых пикселей является переменным параметром алгоритма (другими словами, оно меняется от одной итерации к другой). Более того, следует обратить внимание, что даже если в формуле схематически указано, что координата i меняется от 0 до w/2, а координата j меняется от h/2 до -h/2, в реальности рассматриваются только пиксели с координатами i, j, которые попадают в пределы кольца 151.
Следует обратить внимание, что если имеет высокое значение, это означает, что две противоположные стороны изображения относительно возможной оси симметрии, sij, сильно отличаются (не симметричны) друг от друга, если равно нулю, с другой стороны, это означает, что две стороны идеально симметричны. Поэтому, высокое значение является указывающим низкую вероятность, что рассматриваемая возможная ось симметрии, sij, является диаметром шины. С другой стороны, низкое значение является указывающим высокую вероятность, что рассматриваемая возможная ось симметрии, sij, является диаметром шины.
Как изложено выше, внутренний радиус кольца 151, предпочтительно, слегка больше номинального значения (в пикселях) внутреннего радиуса шины 2. Таким образом, возможный ассиметричный облой, присутствующий на борту 7 шины, априори исключен из анализа, избегая искажения рассчитанного уровня антисимметрии изображения.
Наружный радиус кольца 151, предпочтительно, также является слегка большим, чем номинальное значение наружного радиуса шины 2, чтобы включать в анализ небольшую полосу пикселей заднего плана. Таким образом, как может быть понятно из представления фиг. 8а, если интересующая область 150 не центрирована идеально относительно фактического центра шины 2, такие пиксели (как правило, более светлые или, в любом случае, имеющие иной уровень серого, чем у пикселей шины 2), сравниваемые с зеркальными темными пикселями шины 2, вносят вклад в быстро возрастающее значение уровня антисимметрии . Если, с другой стороны, интересующая область 150 центрирована, пиксели заднего плана сравниваются с другими пикселями заднего плана на противоположной стороне, и их вклад в значение уровня антисимметрии является нулевым. Это преимущественно дает возможность иметь более четкие переходы направления изменения уровня антисимметрии изображения вдоль направления, αi.
На вершине 108 блок-схемы, алгоритм контролирует, были ли проанализированы все из m возможных осей симметрии, si1, si2,.. sij,.. sim. В отрицательном случае, алгоритм возвращается на вершину 103 блок-схемы, где он возобновляет анализ для другой еще не рассмотренной возможной оси симметрии, sij, для того чтобы рассчитать уровень антисимметрии изображения относительно такой оси. Если, с другой стороны, все из m возможных осей симметрии, si1, si2,.. sij,.. sim, были проанализированы (другими словами, уровни антисимметрии изображения были рассчитаны для всех из m возможных осей симметрии, si1, si2,.. sij,.. sim, перпендикулярных направлению анализа, αi), на вершине 109 блок-схемы алгоритм определяет, по уровню симметрии  изображения, рассчитанному относительно каждой из упомянутых возможных осей симметрии, si1, si2,.. sij,.. sim, распределение вероятностей, Pαi, которое является указывающим вероятность того, что центр шины расположен на пикселях изображения, лежащих на упомянутых возможных осях симметрии, si1, si2,.. sij,.. sim (другими словами, вероятность, что диаметр шины расположен на упомянутых возможных осях симметрии, si1, si2,.. sij,.. sim).
изображения, рассчитанному относительно каждой из упомянутых возможных осей симметрии, si1, si2,.. sij,.. sim, распределение вероятностей, Pαi, которое является указывающим вероятность того, что центр шины расположен на пикселях изображения, лежащих на упомянутых возможных осях симметрии, si1, si2,.. sij,.. sim (другими словами, вероятность, что диаметр шины расположен на упомянутых возможных осях симметрии, si1, si2,.. sij,.. sim).
В частности, распределение вероятностей, Pαi, определяется посредством:
- расчета второй производной уровней антисимметрии  изображения (другими словами, среднеквадратических отклонений), рассчитанных для каждой из упомянутых возможных осей симметрии, si1, si2,.. sij,.. sim, перпендикулярных направлению анализа αi; и
изображения (другими словами, среднеквадратических отклонений), рассчитанных для каждой из упомянутых возможных осей симметрии, si1, si2,.. sij,.. sim, перпендикулярных направлению анализа αi; и
- фильтрации рассчитанной второй производной, выполняемой посредством установки всех значений второй производной, которые ниже определенного порогового значения, равными нулю.
Фильтрация, преимущественно, дает возможность устранять отрицательные значения (которые не интересны для целей расчета распределения вероятностей, Pαi) и пики малого возмущения.
Вышеупомянутые операции схематически проиллюстрированы на фиг. 8, где: фиг. 8B схематически показывает кривую AS, которая представляет собой уровни антисимметрии изображения , рассчитанные вдоль направления анализа, αi, для m возможных осей симметрии, si1, si2,.. sij,.. sim; фиг. 8c схематически показывает кривую ASʺ, которая представляет собой вторую производную кривой AS; и фиг. 8D схематически показывает кривую P, которая представляет собой распределение вероятностей, Pαi, полученное посредством фильтрации кривой ASʺ.
Как может быть видно из фиг. 8b-8d, кривые ASʺ и Р имеют максимальный пик на минимуме кривой AS. Поэтому, кривые ASʺ и P являются указывающими уровень симметрии изображения вдоль направления анализа, αi, для m возможных осей симметрии, si1, si2,.. sij,.. sim, а потому, вероятность того, что центр шины расположен на одной из m возможных осей симметрии, si1, si2,.. sij,.. sim. В частности, чем больше значение Р для возможной оси симметрии, sij, тем больше вероятность того, что диаметр шины 2 лежит на этой оси симметрии, sij.
Следует обратить внимание, что на фиг. 8d кривая P представляет собой распределение вероятностей, Pαi, одномерно, другими словами, вдоль направления анализа, αi. Однако, как изложено выше, в реальности, распределение вероятностей, Pαi, является двумерным, поскольку оно указывает вероятность того, что центр шины лежит вдоль m возможных осей симметрии, si1, si2,.. sij,.. sim. Поэтому, на фиг. 8е, кривая P представлена в двух измерениях изображением, имеющим пиксели, которые являются тем светлее, чем выше распределение вероятностей, PαI, в плоскости i, j, где i представляет собой координату вдоль направления анализа, αi, и j - координату вдоль направления, перпендикулярного направлению анализа, αi, и параллельного возможным осям симметрии, si1, si2,.. sij,.. sim. Как может быть видно, пиксели изображения являются в большей степени светлыми на пике кривой Р по фиг. 8d. Как представлено на фиг. 8е, двумерное изображение может быть прямоугольником, например, имеющим протяженность вдоль направления i, равную размаху Е, и исходную протяженность вдоль направления j. В предпочтительном варианте осуществления (не проиллюстрирован), двумерное изображение является квадратом, имеющим протяженность как вдоль направления i, так и вдоль направления j, равную размаху Е (который как правило меньше высоты h прямоугольника 152).
Возвращаясь к блок-схеме последовательности операций по фиг. 5, на вершине 110 блок-схемы, алгоритм контролирует, были ли проанализированы все из n направлений анализа α1, α2,..αi,.. αn. В отрицательном случае, алгоритм возвращается на вершину 101 блок-схемы, где он возобновляет анализ для другого еще не рассмотренного направления анализа, αi, для того чтобы рассчитать распределение вероятностей, Pαi, относительно такого направления анализа. С другой стороны, если были проанализированы все из n направлений анализа, α1, α2,..αi,.. αn, (другими словами, все из распределений вероятностей, Pα1, Pα2, … Pαi, … Pαn, были рассчитаны для всех из n направлений анализа,α1, α2,..αi,.. αn), на вершине 111 блок-схемы алгоритм определяет кумулятивное распределение вероятностей, Pmerged, которое комбинирует распределения вероятностей, Pα1, Pα2, … Pαi, … Pαn, рассчитанные для всех из направлений анализа, α1, α2,..αi,.. αn.
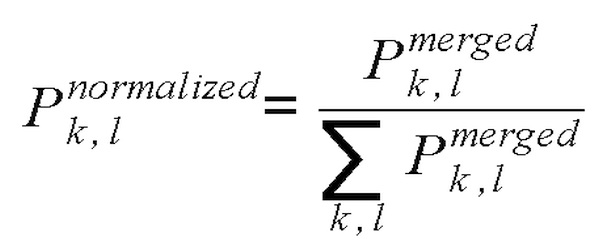
Для каждого пикселя двумерного изображения шины 2 (принятого на входе на вершине 100 блок-схемы), имеющего исходные строчный и столбцовый индексы k и l, кумулятивное распределение вероятностей  задано произведением значений распределения вероятностей, Pαi, полученных вдоль всех из n направлений анализа, α1, α2,..αi,.. αn, на таком пикселе по координатам k,l. Такое , например, может быть схематически представлено следующей формулой:
задано произведением значений распределения вероятностей, Pαi, полученных вдоль всех из n направлений анализа, α1, α2,..αi,.. αn, на таком пикселе по координатам k,l. Такое , например, может быть схематически представлено следующей формулой:
 .
.
где  представляет собой значение распределения вероятностей, Pαi, рассчитанного на вершине 109 блок-схемы на пикселе с координатами k,l. Переход с координат i, j на координаты k,l может выполняться посредством через пригодные математические зависимости в рамках возможностей специалистов в данной области техники.
представляет собой значение распределения вероятностей, Pαi, рассчитанного на вершине 109 блок-схемы на пикселе с координатами k,l. Переход с координат i, j на координаты k,l может выполняться посредством через пригодные математические зависимости в рамках возможностей специалистов в данной области техники.
Следует обратить внимание, что единица «1» в множителях произведения π предотвращает обнуление, даже когда только одна (другими словами, вероятность вдоль одного направления анализа) равна нулю. Это дает возможность не присваивать слишком большого веса возможным затенениям или возмущениям, присутствующим в одном направлении анализа изображения шины 2.
Предпочтительно, при расчете , учитываются только значения , для которых распределение вероятностей, Pαi, (другими словами, кривая P по фиг. 8d) имеет пик (значения или ʺпоказанияʺ) выше определенного порогового значения. Принимая во внимание, что низкое пиковое значение соответствует ситуации неопределенности, это обеспечивает надежность в случае затенений или возмущений в конкретных направлениях полученного изображения шины 2.
Предпочтительно, на вершине 111 блок-схемы, в заключение нормируется, как представлено следующей формулой:
фиг. 9e схематически представляет кумулятивное распределение вероятностей, Pmerged, в качестве сопоставления двумерных изображений (типа изображений по фиг. 8е), которые являются представляющими распределения вероятностей, Pα1, Pα2, … Pαi, … Pαn, полученные для всех из направлений анализа, α1, α2,..αi,.. αn.
Следует обратить внимание, что все такие двумерные изображения привязаны к одной и той же точке (другими словами, в выбранной центральной точке Рс на входе в вершину 101 блок-схемы из вершины 102 блок-схемы). Поэтому, такие изображения могут отображаться на двумерном изображении шины 2 (изображении, принятом на входе в вершину 100 блок-схемы), как показано на фиг. 9.
В частности, фиг. 9а-9е соответственно показывают 1, 2, 3, i и n двумерных изображений, отображенных на двумерном изображении шины 2.
Как может быть видно, комбинация n двумерных изображений приводит к идентификации в двумерном изображении шины 2 области А (смотрите самое бледное центральное пятно) с максимальным значением упомянутого кумулятивного распределения вероятностей, Pmerged, другими словами, максимальным значением интенсивности пикселей.
Возвращаясь к блок-схеме последовательности операций по фиг. 5, на вершине 112 блок-схемы, алгоритм оценивает центр шины на основе нормализованного кумулятивного распределения вероятностей, Pnormalized, определенного на вершине 111 блок-схемы.
Согласно варианту осуществления изобретения, центр шины идентифицирован на пикселе k,l двумерного изображения шины 2, в котором Pnormalized имеет абсолютный максимум.
Однако, принимая во внимание, что Pnormalized является дискретной функцией (полученной из дискретного анализа двумерного изображения шины 2), для того чтобы сделать оценку более точной и также включить в оценку центра пиксели k,l изображения, для которых не было рассчитано значение  , согласно предпочтительному варианту осуществления изобретения, центр шины оценивается посредством идентификации области изображения шины 2 с максимальными значениями упомянутого нормализованного кумулятивного распределения вероятностей, Pnormalized, и расчета центра тяжести упомянутой области. Упомянутая область схематически представлена на фиг. 9е областью А.
, согласно предпочтительному варианту осуществления изобретения, центр шины оценивается посредством идентификации области изображения шины 2 с максимальными значениями упомянутого нормализованного кумулятивного распределения вероятностей, Pnormalized, и расчета центра тяжести упомянутой области. Упомянутая область схематически представлена на фиг. 9е областью А.
Предпочтительно, это выполняется, как изложено ниже:
а) рассчитывается абсолютный максимум Pmax у Pnormalized;
b) пиксели по координатам k,l изображения выбираются так, что >k*Pmax (другими словами, выбираются пиксели по координатам k,l изображения, имеющие большее значение, чем определенное процентное отношение K максимального значения Pmax, например, k=0,8); и
с) координаты Ck, Cl центра шины оцениваются посредством расчета центра тяжести выбранных пикселей, согласно следующей формуле:
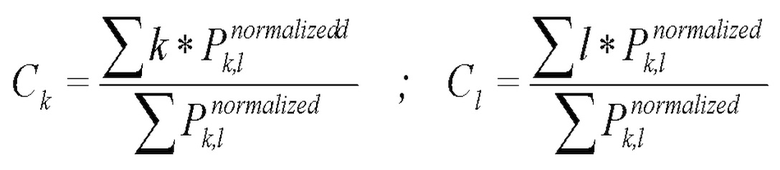
где, как изложено выше, k и l представляют собой строчный и столбцовый индексы выбранных пикселей.
В случае, в котором в точке b) есть непересекающиеся области с максимальным значением упомянутого кумулятивного распределения вероятностей, , можно рассматривать только область, содержащую абсолютный максимум Pmax. Однако, принимая во внимание, что наличие многих непересекающихся областей является указывающим плохое качество выполненной оценки, в качестве альтернативы или в дополнение, можно предусматривать выдачу алгоритмом сообщения об ошибке.
На вершине 113 блок-схемы, алгоритм контролирует, было ли выполнено заданное количество итераций алгоритма. Предпочтительно, заданное количество итераций равно по меньшей мере 2. По мере того как количество итераций возрастает, повышается устойчивость и точность алгоритма. Количество итераций предпочтительно выбирается, с тем чтобы находить хороший компромисс между устойчивостью и точностью с одной стороны и простотой вычислений с другой. Например, хороший компромисс может быть получен за 3 или 4 итерации.
В утвердительном случае, на вершине 114 блок-схемы, координаты в пикселях Ck, Cl оцененного центра шины отображаются в трехмерной в декартовой системе координат рабочей станции 27, определенной первым направлением х, вторым направлением у и осью Z вращения, как описано выше со ссылкой на вершину 100 блок-схемы. После этого, на вершине 115 блок-схемы, алгоритм завершается.
С другой стороны, если заданное количество итераций алгоритма не было выполнено, алгоритм выполняет на вершине 116 блок-схемы обновление выбранной центральной точки Рс, размаха Е, расстояния d между возможными осями симметрии и количества пикселей р, подлежащих анализу, соответственно на вершинах 102, 104 и 107 блок-схемы; после этого, алгоритм начинается снова с вершины 101 блок-схемы.
В частности, выбранная центральная точка Рс устанавливается равной центру шины, оцененному на вершине 112 блок-схемы (упомянутая центральная точка Рс устанавливается равной центру (в пикселях) поворотного стола 35 на первой итерации алгоритма). Более того, значение размаха Е и расстояния d уменьшаются, тогда как количество р пикселей, анализируемых от одной стороны до другой стороны изображения относительно возможной оси симметрии, sij увеличивается. Это дает возможность выполнять пирамидальный анализ изображения, который дает возможность проводить, на первой итерации, быструю и грубую оценку центра шины, анализируя большую зону (другими словами, больший размах Е вокруг предварительно выбранного центра Рс), но грубым шагом дискретизации (другими словами, анализируя расположенные на большем расстоянии возможные оси симметрии, si1, si2,.. sij,.. sim, и меньшее количество р пикселей изображения с одной стороны до другой стороны возможной оси симметрии). С другой стороны, такая грубая оценка центра шины используется в следующих друг за другом итерациях для уменьшения зоны анализа (другими словами, для уменьшения размаха Е, рассматриваемого вокруг такого грубо оцененного центра), и одновременного повышения дискретизации изображений (другими словами, анализа более близких осей симметрии и большего количества р пикселей). Этот пирамидальный анализ преимущественно дает возможность оптимизировать точность оценки центра шина с одной стороны и вычислительную мощность с другой.
Например, поскольку рассматривается значение размаха Е, можно предусмотреть уменьшение его наполовину или более на каждой итерации, например, проходя от значения 300 пикселей на первой итерации до значения 150 пикселей на второй итерации вплоть до значения 30 пикселей на последней итерации (например, третьей). Более того, поскольку рассматривается расстояние d между возможными осями симметрии, si1, si2,.. sij,.. sim, может быть предусмотрено уменьшать его наполовину или более на каждой итерации, например, проходя от значения 10 пикселей на первой итерации до значения 5 пикселей на второй итерации вплоть до значения 1 пикселя на последней итерации (например, третьей). Поскольку рассматривается количество р пикселей, анализируемых с одной стороны до другой стороны изображения относительно возможной оси симметрии, sij, оно увеличивается посредством уменьшения шага дискретизации пикселей изображения, которые расположены в пределах интересующей области 150. Например, со ссылкой на формулу, показанную выше, среднеквадратического отклонения,  , интервал изменения индексов i и j может быть равен 10 пикселям на первой итерации, 5 пикселям на второй итерации и 1 пикселю на последней итерации (например, третьей).
, интервал изменения индексов i и j может быть равен 10 пикселям на первой итерации, 5 пикселям на второй итерации и 1 пикселю на последней итерации (например, третьей).
Как только алгоритм оценки центра шины завершен, электронный блок 48 оценивает ось R вращения шины на оси, которая проходит через оцененный центр и перпендикулярна по существу горизонтальной опорной части 36 поворотного стола 35.
Затем, электронный блок 48 определяет отклонение S, присутствующее между вертикальной осью Z вращения поворотного стола 35 и осью R вращения шины 2, идентифицированной таким образом.
Таким образом, электронный блок 48 управления управляет первым приводом 45 и/или вторым приводом 46 станции 27 контроля и перемещает опорную часть 36 согласно первому направлению х и/или второму направлению у, в качестве функции выявленного отклонения S до тех пор, пока, в горизонтальной плоскости, ось R вращения шины не выровнена с осью Z вращения поворотного стола 35. Выравнивание является таким, чтобы сделать выявленное отклонение S меньшим, чем заданное значение, например, равным или меньшим, чем, приблизительно, 0,1 мм.
В варианте осуществления, если отклонение S, определенное электронным блоком 48, больше определенного порогового значения, после выполнения операции центрирования, приспособленной для выравнивания оси R вращения шины (оцененного посредством первого выполнения алгоритма оценки положения центра шины) с осью Z вращения поворотного стола 35, предусмотрено повторять операцию центрирования вновь, выполняя операции, описанные выше, и в частности, алгоритм оценки положения центра шины, а потому, ее оси R вращения. Это преимущественно дает возможность улучшать достоверность оценки положения оси R вращения шины, а потому, надежность операции центрирования.
После этого, антропоморфные роботизированные руки 49 перемещаются в пространстве для маневрирования до тех пор, пока соответственные устройства 50 контроля не приведены в непосредственную близость к шине 2.
Удерживая устройства 50 контроля в неподвижном положении, поворотный стол 35 и шина 2 побуждаются вращаться вокруг вертикальной оси Z вращения. Во время такого вращения, устройства 50 выполняют цикл операций контроля над первой осевой половиной 2а шины 2. Такие операции контроля могут выполняться в следующих друг за другом циклах, и, в каждом цикле, устройства 50 контроля одной и той же станции 27 контроля размещены в разных положениях, чтобы осуществлять контроль разных участков одной и той же шины 2.
Следует обратить внимание, что как только центрирована, шина 2 имеет свою ось R вращения, по существу совпадающую с вертикальной осью Z вращения поворотного стола 35. В такой ситуации, антропоморфные роботизированные руки 49 преимущественно могут быть расположены в заданных положениях в качестве функции модели шины 2, без риска столкновения шины 2, в то время как она вращается на поворотном столе 35. Более того, центрирование преимущественно гарантирует, что изображения, полученные во время вращения шины 2 сфокусированы надлежащим образом и находятся в пределах поля обзора камер(ы).
Как только циклы контроля закончились, вращение поворотного стола 35 прекращается, причем первое направление х выравнивается с направлением F подачи, а антропоморфные роботизированные руки 49 отдаляются от шины 2.
Таким образом, шина 2 выгружается из первой станции 27 контроля и подается на следующую станцию 27 контроля устройства 18, где шина 2 центрируется и анализируется способами, аналогичными описанным для первой станции 27 контроля.
Как только обследование первой осевой половины 2а шины 2 завершилось, операции контроля предпочтительно повторяются на второй осевой половине 2b шины на пригодных станциях 27 контроля из устройства 18 способами, аналогичными описанным выше для первой осевой половины 2а.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ, УСТРОЙСТВО И СИСТЕМА ДЛЯ ФОРМИРОВАНИЯ ВИДЕОСИГНАЛА | 2016 |
|
RU2732989C2 |
| СПОСОБ И СТАНЦИЯ КОНТРОЛЯ ШИН ДЛЯ КОЛЕС ТРАНСПОРТНЫХ СРЕДСТВ | 2017 |
|
RU2737564C2 |
| СИСТЕМЫ И СПОСОБЫ МИКРОСКОПИИ СТРУКТУРИРОВАННОГО ОСВЕЩЕНИЯ | 2020 |
|
RU2829111C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ СТЕРЕОСКОПИЧЕСКОЙ РАДИОГРАФИИ СО МНОЖЕСТВОМ УГЛОВ ЗРЕНИЯ | 2003 |
|
RU2253952C1 |
| СПОСОБ И ЛИНИЯ ДЛЯ КОНТРОЛЯ ШИН КОЛЕС ТРАНСПОРТНЫХ СРЕДСТВ | 2017 |
|
RU2729453C2 |
| СПОСОБ И УСТРОЙСТВО ОБНАРУЖЕНИЯ ДЕФЕКТОВ НА ПОВЕРХНОСТИ ШИН | 2016 |
|
RU2657648C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПИЛОМАТЕРИАЛОВ | 2007 |
|
RU2444002C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АНАЛИЗА ПОВЕРХНОСТИ ШИНЫ | 2016 |
|
RU2707723C2 |
| ПОВЫШЕННАЯ ЭФФЕКТИВНОСТЬ РАСЧЕТА ДЛЯ МИКРОСКОПИИ СТРУКТУРИРОВАННОГО ОСВЕЩЕНИЯ | 2020 |
|
RU2820783C1 |
| Способ и устройство для детектирования дефектов на шинах в процессе производства шин | 2015 |
|
RU2640673C1 |
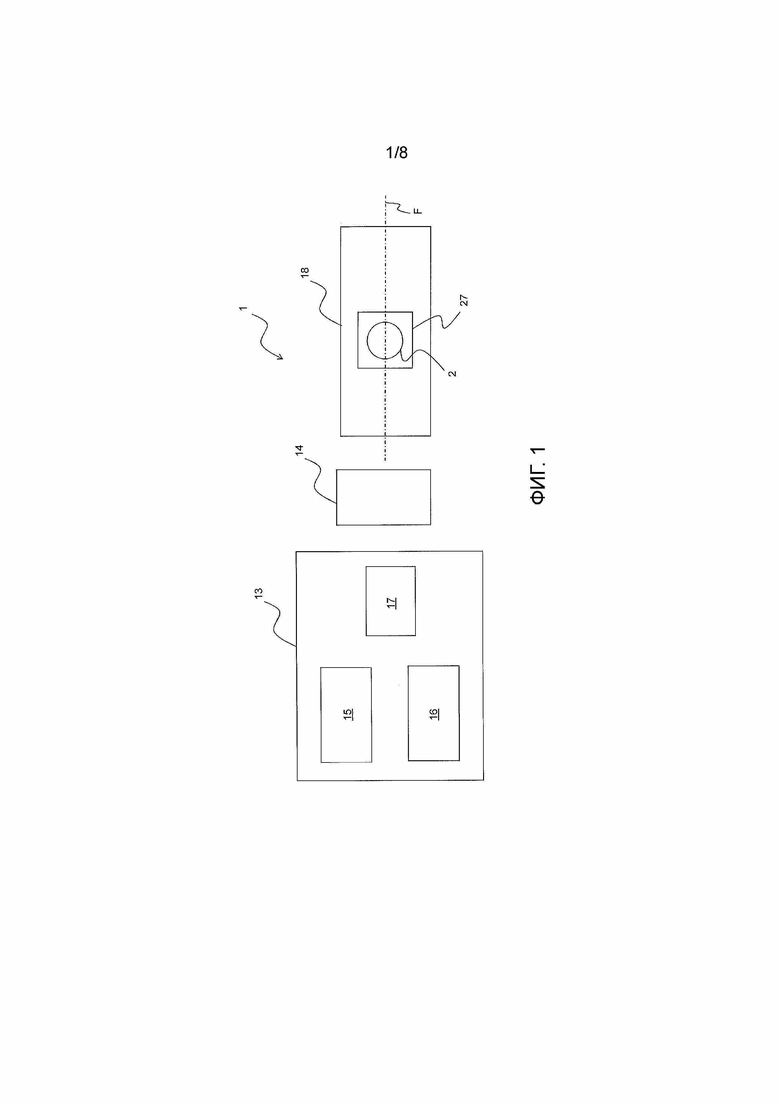
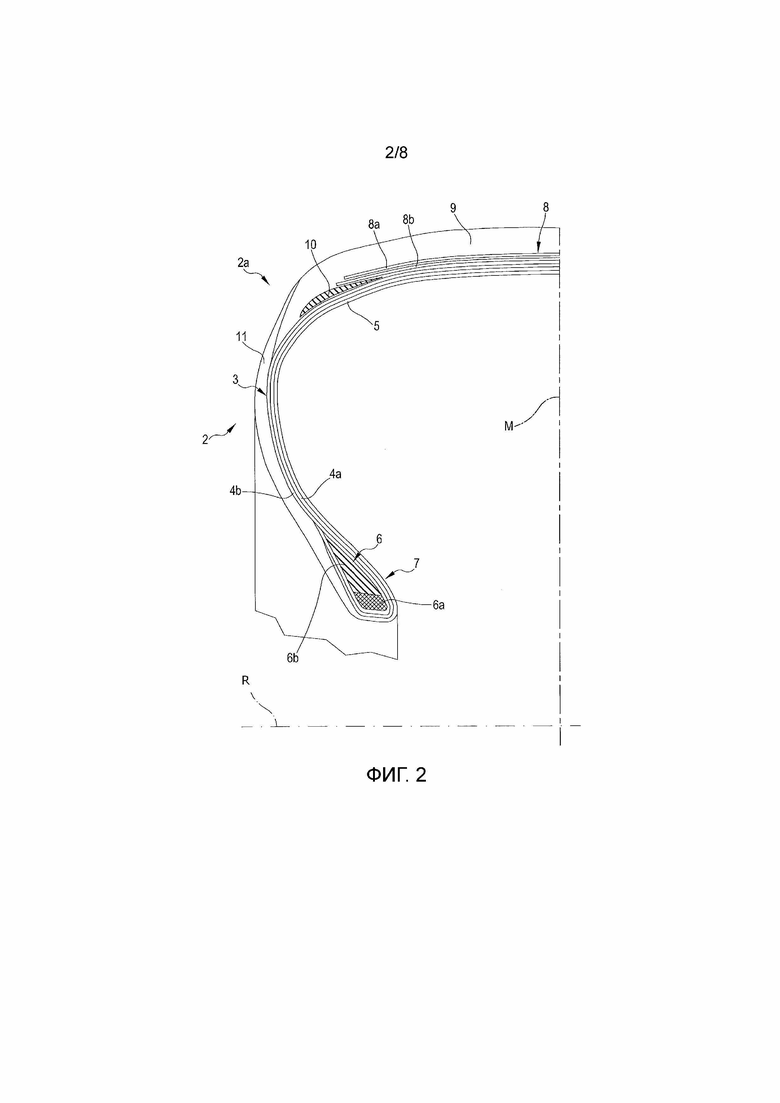
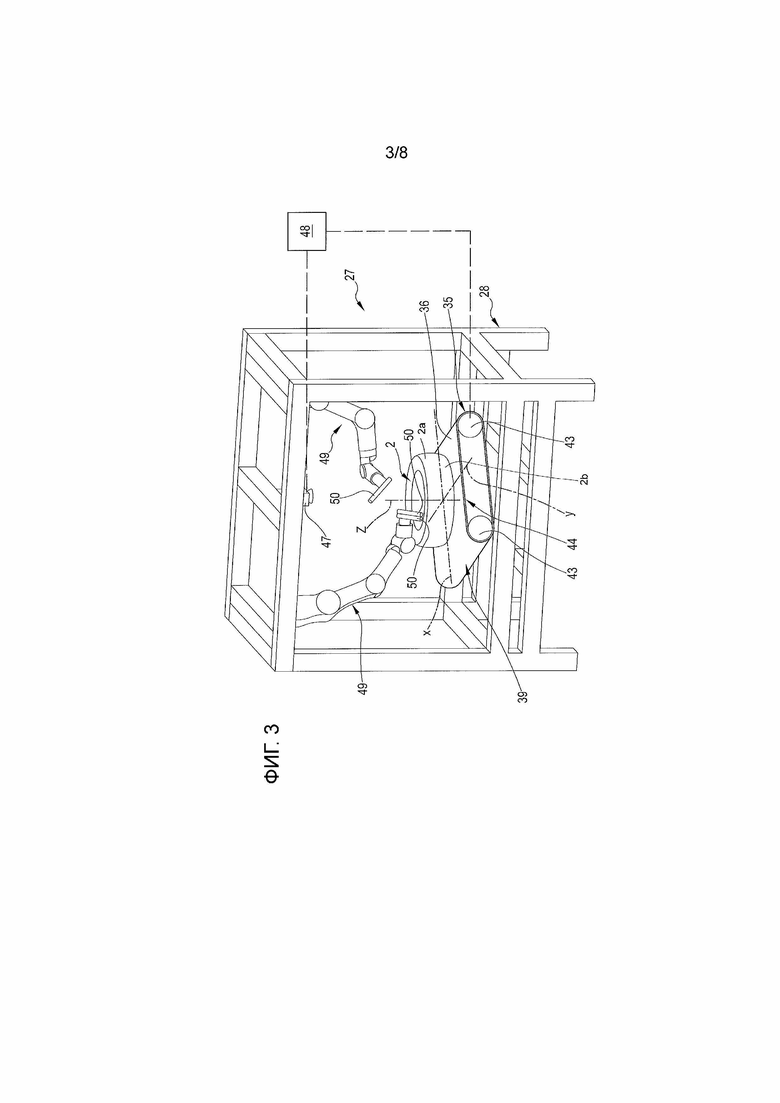
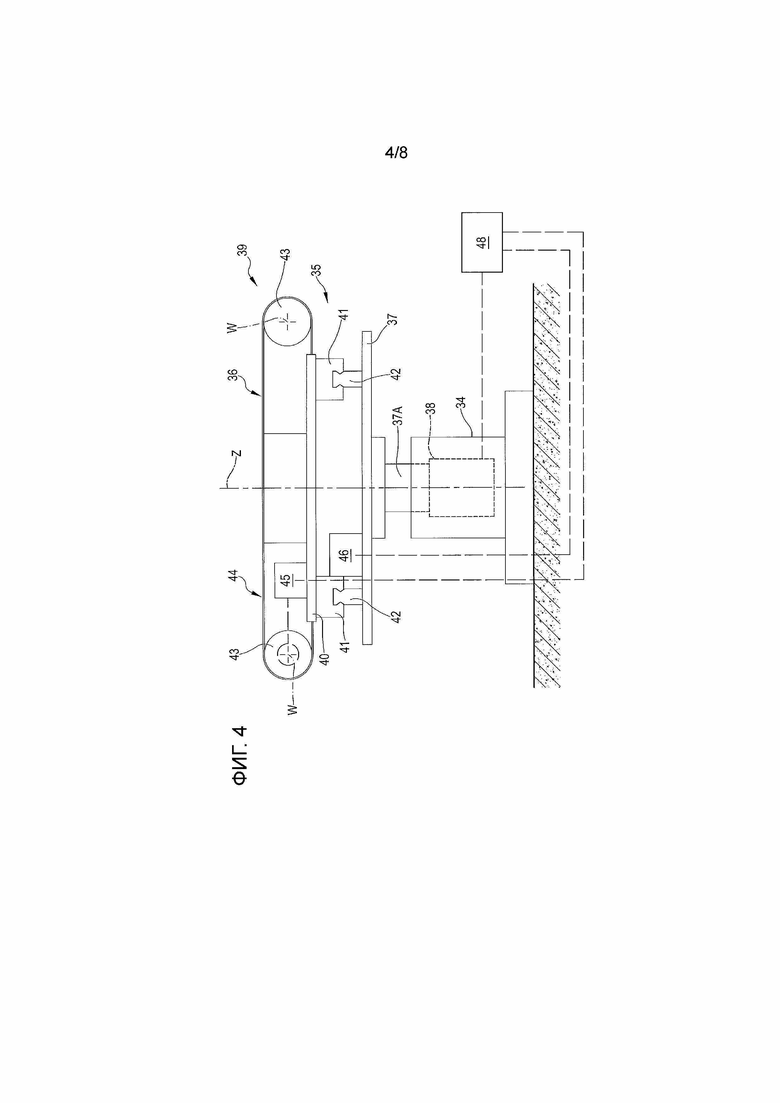
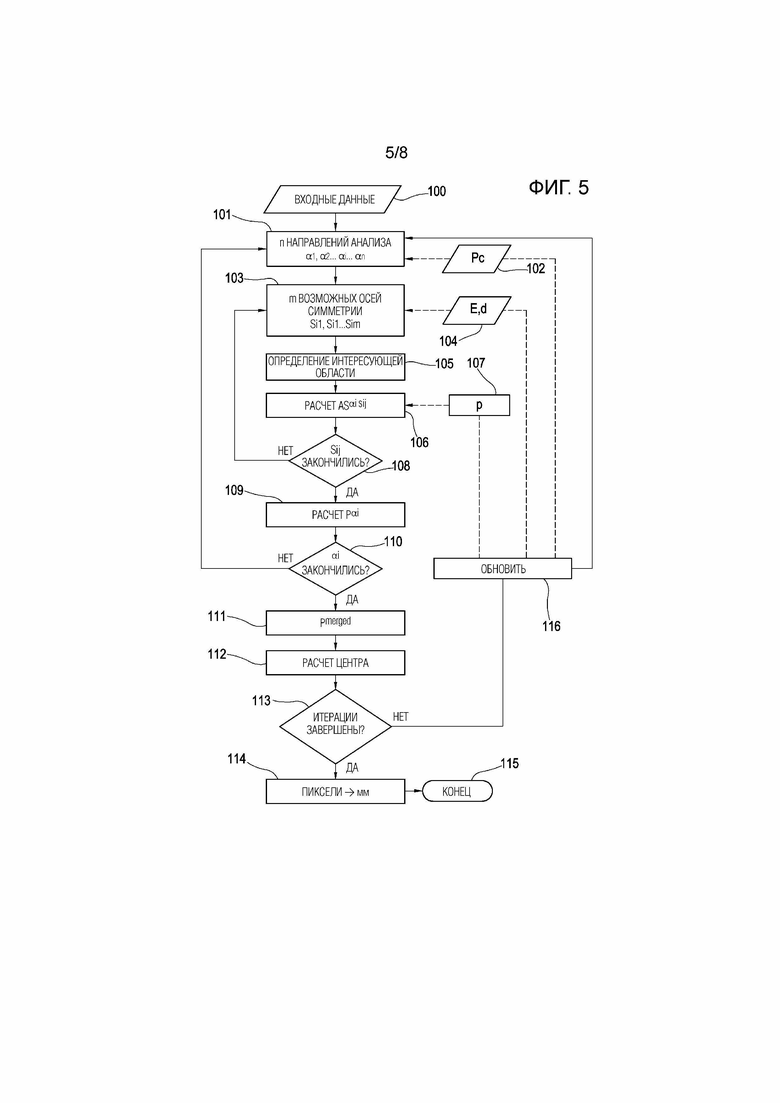
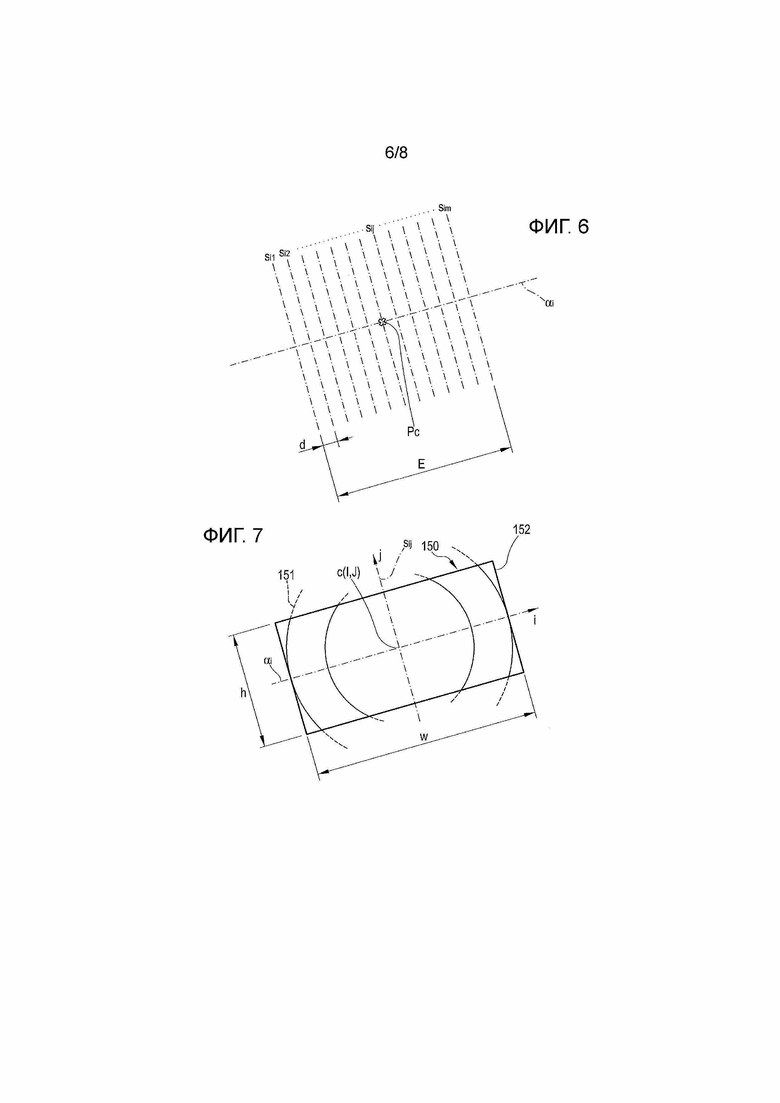
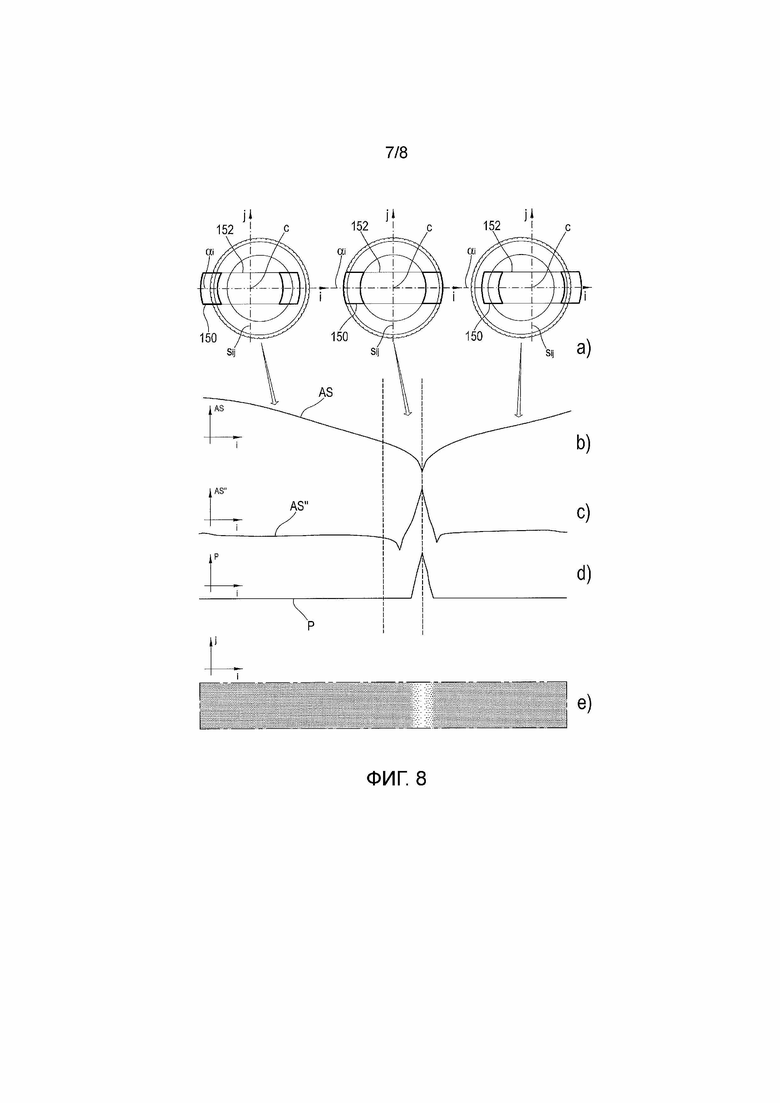
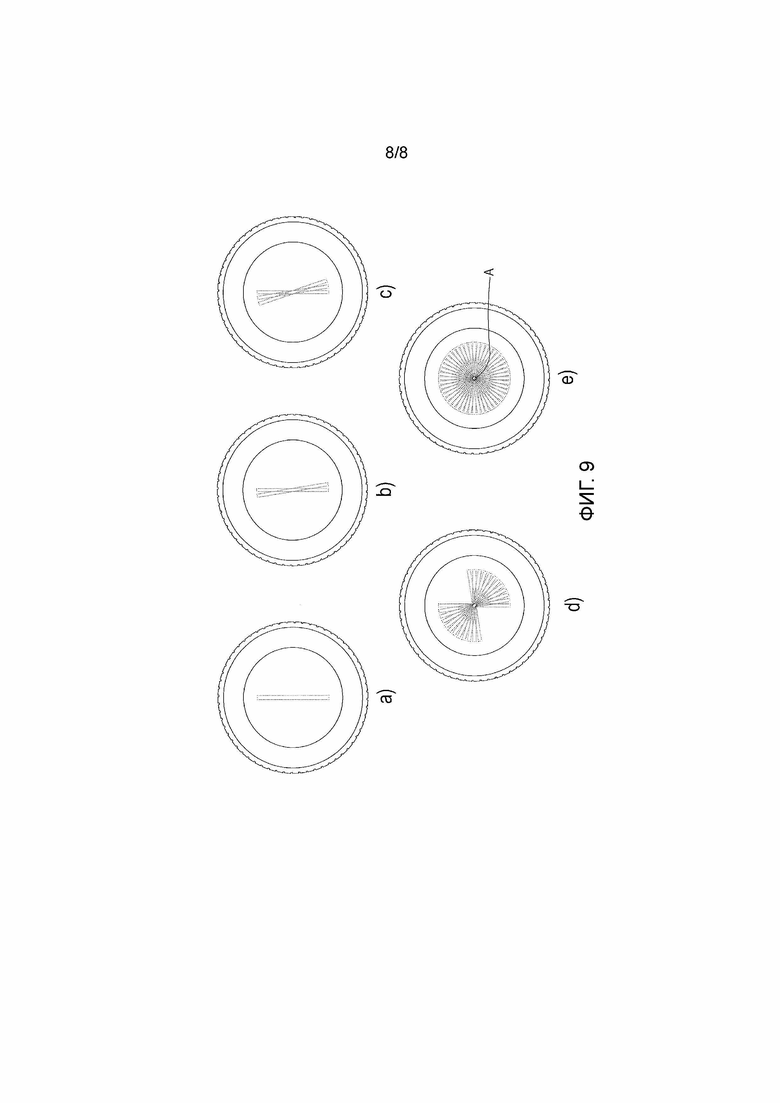
Способ и устройство (18) для контроля шин (2) для колес транспортного средства, в которых предусмотрены: подача шины (2), подлежащей контролю, на станцию (27) контроля с боковиной (11) шины (2), уложенной на опорную часть (36) поворотного стола (35), при этом опорная часть (36) лежит в плоскости и поворотный стол (35) имеет ось (Z) вращения, перпендикулярную упомянутой плоскости; и выполнение операции центрирования, приспособленной выравнивать, в упомянутой плоскости, ось (R) вращения шины (2) с осью (Z) вращения поворотного стола (35). Операция центрирования содержит идентификацию, в упомянутой плоскости, оси (R) вращения шины (2) посредством: а) получения изображения шины (2), уложенной на упомянутую опорную часть (36) поворотного стола (35); b) определения, в полученном изображении, количества n направлений анализа, α1, α2, …, αi, …, αn, пересекающихся в одной выбранной центральной точке (Pc), причем n и i - целые числа, n>1 и 1 ≤ i ≤ n; c) для каждого направления анализа αi: определения, в полученном изображении, количества m возможных осей симметрии, si1, si2, …, sij, …, sim, перпендикулярных направлению анализа, αi, где m и j - целые числа, причем m>1 и 1 ≤ j ≤ m; расчета уровня симметрии изображения относительно каждой из упомянутых возможных осей симметрии, si1, si2, …, sij, …, sim, при этом упомянутый уровень симметрии является указывающим вероятность того, что центр шины (2) находится на соответственной возможной оси симметрии, si1, si2, …, sij, …, sim; определения распределения  вероятностей, указывающего отклонение упомянутого уровня симметрии вдоль упомянутого направления анализа, αi; d) определения центра шины (2) на основе кумулятивного распределения вероятностей, Pmerged, полученного посредством комбинирования распределений вероятностей, , рассчитанных для упомянутых направлений анализа, α1, α2, …, αi, …, αn; e) идентификации оси (R) вращения шины (2) на оси, которая проходит через упомянутый определенный центр и перпендикулярной упомянутой плоскости. Технический результат – повышение точности, надежности и безопасности операций контроля, проводимых над шинами при вращении на поворотном столе. 3 н. и 39 з.п. ф-лы, 9 ил.
вероятностей, указывающего отклонение упомянутого уровня симметрии вдоль упомянутого направления анализа, αi; d) определения центра шины (2) на основе кумулятивного распределения вероятностей, Pmerged, полученного посредством комбинирования распределений вероятностей, , рассчитанных для упомянутых направлений анализа, α1, α2, …, αi, …, αn; e) идентификации оси (R) вращения шины (2) на оси, которая проходит через упомянутый определенный центр и перпендикулярной упомянутой плоскости. Технический результат – повышение точности, надежности и безопасности операций контроля, проводимых над шинами при вращении на поворотном столе. 3 н. и 39 з.п. ф-лы, 9 ил.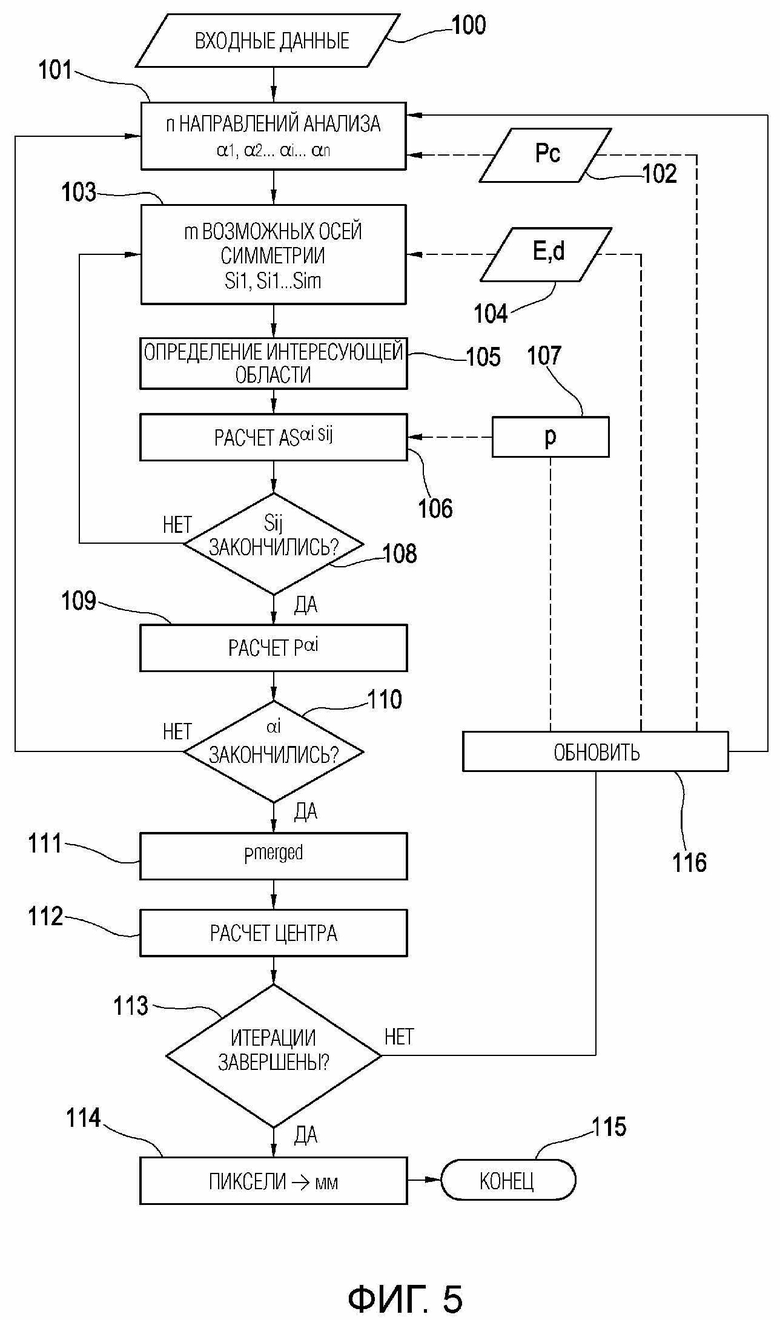
1. Способ контроля шин (2) для колес транспортных средств, причем каждая шина (2) имеет ось (R) вращения, при этом способ включает этапы, на которых:
подают шину (2), подлежащую контролю, на станцию (27) контроля с боковиной (11) шины (2), уложенной на опорную часть (36) поворотного стола (35), причем опорная часть (36) лежит в плоскости и поворотный стол (35) имеет ось (Z) вращения, перпендикулярную упомянутой плоскости;
выполняют операцию центрирования, приспособленную выравнивать, в упомянутой плоскости, ось (R) вращения шины (2) с осью (Z) вращения поворотного стола (35),
при этом операция центрирования включает идентификацию, в упомянутой плоскости, оси (R) вращения шины (2) посредством:
а) получения, согласно виду сбоку, изображения шины (2), уложенной на опорную часть (36) поворотного стола (35);
b) определения, в полученном изображении, количества n направлений α1, α2, …, αi, …, αn анализа, пересекающихся в одной выбранной центральной точке (Pc), причем n и i - целые числа, n>1 и 1 ≤ i ≤ n;
c) для каждого направления αi анализа:
c1) определения, в полученном изображении, количества m возможных осей si1, si2, …, sij, …, sim симметрии, перпендикулярных направлению αi анализа, где m и j - целые числа, причем m>1 и 1 ≤ j ≤ m;
c2) расчета уровня симметрии изображения относительно каждой из упомянутых возможных осей si1, si2, …, sij, …, sim симметрии, при этом упомянутый уровень симметрии является указывающим на вероятность того, что центр шины (2) находится на соответственной возможной оси si1, si2, …, sij, …, sim симметрии;
c3) определения распределения  вероятностей, указывающего отклонение упомянутого уровня симметрии вдоль упомянутого направления αi анализа;
вероятностей, указывающего отклонение упомянутого уровня симметрии вдоль упомянутого направления αi анализа;
d) определения центра шины (2) на основе кумулятивного распределения Pmerged вероятностей, полученного посредством комбинирования распределений вероятностей, определенных для упомянутых направлений α1, α2, …, αi, …, αn анализа;
e) идентификации оси (R) вращения шины (2) на оси, проходящей через упомянутый определенный центр и перпендикулярной упомянутой плоскости.
2. Способ по п. 1, в котором упомянутое распределение вероятностей определяется на основе упомянутого расчета уровня симметрии изображения относительно каждой из упомянутых возможных осей si1, si2, …, sij, …, sim симметрии.
3. Способ по п. 1 или 2, в котором на этапе d) центр шины (2) идентифицируют посредством определения зоны (А) изображения с максимальными значениями упомянутого кумулятивного распределения Pmerged вероятностей и расчета центра тяжести упомянутой зоны (А).
4. Способ по любому из предыдущих пунктов, в котором на этапе d) центр шины (2) идентифицируют посредством выбора пикселей изображения, в которых упомянутое кумулятивное распределение Pmerged вероятностей принимает значения, большие чем пороговое значение, и расчета центра тяжести упомянутых пикселей.
5. Способ по п. 1 или 2, в котором на этапе d) центр шины (2) идентифицируют посредством идентификации пикселя изображения, в котором упомянутое кумулятивное распределение Pmerged вероятностей имеет максимальное значение.
6. Способ по любому из предыдущих пунктов, в котором этапы b) - d) повторяют заданное количество раз, большее или равное 1, каждый раз принимая в качестве выбранной центральной точки (Рс) центр шины (2), оцененный в непосредственно предыдущей итерации.
7. Способ по п. 6, в котором на первой итерации выбранная центральная точка (Рс) соответствует центру поворотного стола (35).
8. Способ по п. 6 или 7, в котором на каждой итерации кумулятивное распределение Pmerged вероятностей получают посредством анализа ближних возможных осей si1, si2, …, sij, …, sim симметрии относительно непосредственно предыдущей итерации.
9. Способ по любому из пп. 6-8, в котором на каждой итерации кумулятивное распределение Pmerged вероятностей получают посредством анализа возможных осей si1, si2,.. sij,.. sim симметрии в соответствии с уменьшенным размахом E, относительно непосредственно предыдущей итерации, причем упомянутый размах E продолжается вдоль направления αi анализа и центрируется в выбранной центральной точке (Pc).
10. Способ по любому из предыдущих пунктов, в котором для каждого направления αi анализа и для каждой возможной оси sij симметрии уровень симметрии изображения относительно каждой из упомянутых возможных осей si1, si2, …, sij, …, sim симметрии рассчитывают посредством анализа пикселей полученного изображения, которые расположены на двух противоположных сторонах изображения относительно возможной оси sij симметрии.
11. Способ по любому из пп. 6-9, в котором для каждого направления αi анализа и для каждой возможной оси sij симметрии уровень симметрии изображения относительно каждой из упомянутых возможных осей si1, si2, …, sij, …, sim симметрии рассчитывают посредством анализа пикселей полученного изображения, которые расположены на двух противоположных сторонах изображения относительно возможной оси sij симметрии, причем количество анализируемых пикселей возрастает на каждой итерации относительно непосредственно предыдущей итерации.
12. Способ по п. 10 или 11, в котором анализируемые пиксели выбирают в пределах интересующей области (150), определенной в пределах полученного изображения для каждой возможной оси sij симметрии каждого направления αi анализа.
13. Способ по п. 12, в котором для каждой возможной оси sij симметрии упомянутая интересующая область (150) симметрична относительно упомянутой возможной оси sij симметрии.
14. Способ по п. 12 или 13, в котором для каждой возможной оси sij симметрии каждого направления αi анализа упомянутая интересующая область (150) определяется пересечением между кольцом (151), имеющим внутренний и внешний радиус, наделенные размерами соответственно согласно номинальным значениям внутреннего и внешнего радиуса шины (2), и прямоугольником (152), имеющим главную центральную линию на направлении αi анализа и второстепенную центральную линию на возможной оси sij симметрии.
15. Способ по п. 14, в котором упомянутый прямоугольник (152) имеет длину (w) вдоль направления αi анализа, большую или равную внешнему диаметру шины (2), и высоту (h) вдоль возможной оси симметрии, по существу равную внешнему радиусу шины (2).
16. Способ по любому из предыдущих пунктов, в котором на этапе c2) расчет уровня симметрии изображения относительно каждой оси sij из упомянутых возможных осей si1, si2,.. sij,.. sim симметрии включает расчет среднеквадратического отклонения  между интенсивностью пикселей изображения, расположенных на одной стороне относительно возможной оси sij симметрии, и интенсивностью зеркальных пикселей, расположенных на противоположной стороне изображения относительно возможной оси sij симметрии.
между интенсивностью пикселей изображения, расположенных на одной стороне относительно возможной оси sij симметрии, и интенсивностью зеркальных пикселей, расположенных на противоположной стороне изображения относительно возможной оси sij симметрии.
17. Способ по п. 16, в котором расчет уровня симметрии изображения относительно каждой из упомянутых возможных осей si1, si2, …, sij, …, sim симметрии содержит расчет второй производной упомянутого среднеквадратического отклонения .
18. Способ по любому из предыдущих пунктов, в котором для каждого направления αi анализа, если определенное распределение вероятностей имеет максимальное значение ниже заданного порогового значения, распределение вероятностей не учитывается при получении кумулятивного распределения Pmerged вероятностей.
19. Способ по любому из пп. 1-17, в котором упомянутое кумулятивное распределение Pmerged вероятностей получают посредством слияния всех распределений вероятностей.
20. Способ по любому из предыдущих пунктов, в котором на этапе а) изображение получают с помощью стационарного поворотного стола (35).
21. Способ по любому из предыдущих пунктов, в котором операция центрирования содержит получение отклонения (S), в упомянутой плоскости, между осью (Z) вращения поворотного стола (35) и осью (R) вращения шины (2).
22. Способ по п. 21, в котором при наличии упомянутого отклонения (S) операция центрирования включает перемещение шины (2) в упомянутой плоскости относительно оси (Z) вращения поворотного стола (35) до тех пор, пока ось (R) вращения шины (2) по существу не будет выровнена с осью (Z) вращения поворотного стола (35).
23. Способ по любому из предыдущих пунктов, в котором, после операции центрирования, поворачивают поворотный стол (35) вместе с шиной (2) вокруг оси (Z) вращения поворотного стола (35) и выполняют операции контроля над шиной (2), в то время как поворотный стол (35) и шина (2) вращаются.
24. Устройство (18) для контроля шин (2) для колес транспортных средств, причем каждая шина (2) имеет ось (R) вращения, при этом устройство (18) содержит по меньшей мере одну станцию (27) контроля, содержащую:
стол (35), поворачивающийся вокруг оси (Z) вращения и имеющий опорную часть (36), выполненную с возможностью приема и поддержания боковины (11) шины (2), причем опорная часть (36) лежит в плоскости, перпендикулярной оси (Z) вращения поворотного стола (35);
устройства (47) получения изображений, выполненные с возможностью получения, согласно виду сбоку, изображения шины (2), уложенной на опорную часть (36) поворотного стола (35);
электронный блок (48), выполненный с возможностью управления операцией центрирования, предназначенной для выравнивания, в упомянутой плоскости, оси (R) вращения шины (2) с осью (Z) вращения поворотного стола (35), при этом операция центрирования включает идентификацию, в упомянутой плоскости, оси (R) вращения шины (2) посредством:
определения, в полученном изображении, количества n направлений α1, α2, …, αi, …, αn анализа, пересекающихся в одной выбранной центральной точке (Pc), причем n и i - целые числа, n>1 и 1 ≤ i ≤ n;
при этом для каждого направления анализа αi:
- количество m возможных осей si1, si2, …, sij, …, sim симметрии, перпендикулярных направлению αi анализа, определяется в полученном изображении, где m и j - целые числа, m>1 и 1 ≤ j ≤ m;
- рассчитывается уровень симметрии изображения относительно каждой из упомянутых осей si1, si2, …, sij, …, sim симметрии, при этом упомянутый уровень симметрии является указывающим на вероятность того, что центр шины (2) находится на соответственной возможной оси si1, si2, …, sij, …, sim симметрии;
- определяется распределение вероятностей, указывающее отклонение упомянутого уровня симметрии вдоль упомянутого направления αi анализа;
определения центра шины (2) на основе кумулятивного распределения Pmerged вероятностей, полученного посредством комбинирования распределений вероятностей, определенных для упомянутых направлений α1, α2, …, αi, …, αn анализа;
идентификации оси (R) вращения шины (2) на оси, проходящей через упомянутый определенный центр и перпендикулярной упомянутой плоскости.
25. Устройство (18) по п. 24, в котором упомянутое распределение вероятностей определяется на основе упомянутого расчета уровня симметрии изображения относительно каждой из упомянутых возможных осей si1, si2, …, sij, …, sim симметрии.
26. Устройство (18) по п. 24 или 25, в котором устройства (47) получения изображений содержат камеру, расположенную таким образом, чтобы иметь оптическую ось, по существу совпадающую с осью (Z) вращения поворотного стола (35).
27. Устройство (18) по любому из пп. 24-26, в котором упомянутая по меньшей мере одна станция (27) контроля содержит по меньшей мере один привод (45, 46), функционально присоединенный к опорной части (36) поворотного стола (35), для перемещения упомянутой опорной части (36) по двум направлениям (x, y), принадлежащим упомянутой плоскости.
28. Устройство (18) по п. 27, в котором электронный блок (48) выполнен с возможностью управления упомянутым по меньшей мере одним приводом (45, 46), чтобы перемещать опорную часть (36) поворотного стола (35) согласно по меньшей мере одному из упомянутых двух направлений (x, y) до тех пор, пока ось (R) вращения шины (2) по существу не будет выровнена с осью (Z) вращения поворотного стола (35).
29. Способ оценки положения центра шины (2) для колес транспортных средств, включающий этапы, на которых:
а) получают, согласно виду сбоку, изображение шины (2) с боковиной (11), уложенной на опорную часть (36), лежащую в плоскости,
b) определяют, в полученном изображении, количество n направлений α1, α2, …, αi, …, αn анализа, пересекающихся в одной выбранной центральной точке (Pc), причем n и i - целые числа, n>1 и 1 ≤ i ≤ n;
c) для каждого направления анализа αi:
c1) определяют, в полученном изображении, количество m возможных осей si1, si2, …, sij, …, sim симметрии, перпендикулярных направлению αi анализа, причем m и j - целые числа, m>1 и 1 ≤ j ≤ m, и
c2) рассчитывают уровень симметрии изображения относительно каждой из упомянутых возможных осей si1, si2, …, sij, …, sim симметрии, при этом упомянутый уровень симметрии является указывающим на вероятность того, что центр шины (2) находится на соответственной возможной оси si1, si2, …, sij, …, sim симметрии;
c3) определяют распределение вероятностей, указывающее отклонение упомянутого уровня симметрии вдоль упомянутого направления αi анализа;
d) определяют положение центра шины (2) на основе кумулятивного распределения Pmerged вероятностей, полученного посредством комбинирования распределений вероятностей, рассчитанных для упомянутых направлений α1, α2, …, αi, …, αn анализа.
30. Способ по п. 29, в котором упомянутое распределение вероятностей определяют на основе упомянутого расчета уровня симметрии изображения относительно каждой из упомянутых возможных осей si1, si2, …, sij, …, sim симметрии.
31. Способ по п. 29 или 30, в котором на этапе d) центр шины (2) идентифицируют посредством определения зоны (А) изображения с максимальными значениями упомянутого кумулятивного распределения Pmerged вероятностей и расчета центра тяжести упомянутой зоны (А).
32. Способ по любому из предыдущих пп. 29-31, в котором на этапе d) центр шины (2) идентифицируют посредством выбора пикселей изображения, в которых упомянутое кумулятивное распределение Pmerged вероятностей принимает значения, большие чем пороговое значение, и расчета центра тяжести упомянутых пикселей.
33. Способ по п. 29 или 30, в котором на этапе d) центр шины (2) идентифицируют посредством идентификации пикселя изображения, в котором упомянутое кумулятивное распределение Pmerged вероятностей имеет максимальное значение.
34. Способ по любому из пп. 29-33, в котором этапы b) - d) повторяют заданное количество раз, большее или равное 1, каждый раз принимая в качестве выбранной центральной точки (Рс) центр шины (2), оцененный в непосредственно предыдущей итерации.
35. Способ по п. 34, в котором на каждой итерации кумулятивное распределение Pmerged вероятностей получают посредством анализа ближних возможных осей si1, si2, …, sij, …, sim симметрии относительно непосредственно предыдущей итерации.
36. Способ по п. 34 или 35, в котором на каждой итерации кумулятивное распределение Pmerged вероятностей получают посредством анализа возможных осей si1, si2, …, sij, …, sim симметрии в соответствии с уменьшенным размахом E относительно непосредственно предыдущей итерации, причем упомянутый размах E продолжается вдоль направления αi анализа и центрируется в выбранной центральной точке (Pc).
37. Способ по любому из пп. 29-36, в котором для каждого направления αi анализа и для каждой возможной оси sij симметрии уровень симметрии изображения относительно каждой из упомянутых возможных осей si1, si2, …, sij, …, sim симметрии рассчитывают посредством анализа пикселей полученного изображения, которые расположены на двух противоположных сторонах изображения относительно возможной оси симметрии sij.
38. Способ по любому из пп. 34-36, в котором для каждого направления αi анализа и для каждой возможной оси sij симметрии уровень симметрии изображения относительно каждой из упомянутых возможных осей si1, si2, …, sij, …, sim симметрии рассчитывают посредством анализа пикселей полученного изображения, которые расположены на двух противоположных сторонах изображения относительно возможной оси sij симметрии, причем количество анализируемых пикселей возрастает на каждой итерации относительно непосредственно предыдущей итерации.
39. Способ по п. 37 или 38, в котором анализируемые пиксели выбираются в пределах интересующей области (150), определенной в пределах полученного изображения для каждой возможной оси sij симметрии каждого направления αi анализа.
40. Способ по п. 39, в котором для каждой возможной оси sij симметрии упомянутая интересующая область (150) симметрична относительно упомянутой возможной оси sij симметрии.
41. Способ по п. 39 или 40, в котором для каждой возможной оси sij симметрии каждого направления αi анализа упомянутая интересующая область (150) определяется пересечением между кольцом (151), имеющим внутренний и внешний радиус, наделенные размерами соответственно согласно номинальным значениям внутреннего и внешнего радиуса шины (2), и прямоугольником (152), имеющим главную центральную линию на направлении αi анализа и второстепенную центральную линию на возможной оси sij симметрии.
42. Способ по любому из пп. 29-41, в котором на этапе c2) расчет уровня симметрии изображения относительно каждой оси sij из упомянутых возможных осей si1, si2, …, sij, …, sim симметрии включает расчет среднеквадратического отклонения между интенсивностью пикселей изображения, расположенных на одной стороне относительно возможной оси sij симметрии, и интенсивностью зеркальных пикселей, расположенных на противоположной стороне изображения относительно возможной оси sij симметрии.
| СПОСОБ ОБЕСПЕЧЕНИЯ ПРОЕКТНОГО ПОЛОЖЕНИЯ ТРУБОПРОВОДОВ ОБВЯЗКИ ГАЗО- ИЛИ НЕФТЕДОБЫВАЮЩИХ СКВАЖИН В РАЙОНАХ РАСПРОСТРАНЕНИЯ ВЕЧНОМЕРЗЛЫХ ГРУНТОВ | 2008 |
|
RU2390621C1 |
| СОЕДИНЕНИЯ СТЕРЖНЯ И ЗАГЛУШКИ КЛАПАНА И ИНСТРУМЕНТЫ ДЛЯ ОБЖИМКИ | 2016 |
|
RU2711693C2 |
| DE 102008037356 B4, 21.02.2013. | |||

