Настоящее изобретение относится к способу и устройству для анализа поверхности шины, например, для обнаружения возможного наличия дефектов на поверхности шины.
Под термином «дефект» понимается любое отклонение от заданного состояния независимо от того, вызывает ли такое отклонение ухудшение эксплуатационных характеристик шины (которая вследствие этого может быть отбракована или понижена в сортности) или представляет собой простое отклонение от нормы (например, эстетическое), которое не вызывает отбраковку или понижение сортности шины. Дефекты могут представлять собой, например, участки с невулканизированной смесью, изменения формы, надрезы, ползучесть в каркасе, наличие посторонних предметов на поверхности и т.д.
Под «шиной» понимается готовая шина, то есть шина после этапов формования в пресс-форме и вулканизации. После изготовления невулканизированной шины, как правило, выполняют обработку, заключающуюся в формовании в пресс-форме и вулканизации, для обеспечения стабилизации конструкции шины посредством сшивания эластомерных композиций, а также для образования заданного рисунка протектора на ней и любых отличительных или информационных графических знаков на боковинах.
В соответствии с типовым способом во время этапа формования в пресс-форме и вулканизации соответствующую диафрагму (как правило, из эластомерного соединения) вставляют внутрь шины и обеспечивают ее расширение (например, пневматически) к внутренней поверхности шины для поджима шины к наружной пресс-форме и гарантирования ее надлежащего плотного прилегания к пресс-форме. Данная диафрагма, как правило, выполнена с наружными канавками с такой схемой расположения канавок, чтобы облегчить локальное скольжение внутренней поверхности шины и наружной поверхности диафрагмы друг относительно друга во время вулканизации и формования в пресс-форме. Такая схема расположения может способствовать выходу воздуха, захваченного между диафрагмой и шиной, и/или способствовать отсоединению диафрагмы от шины в конце формования в пресс-форме и вулканизации. Следовательно, внутренняя поверхность шины имеет соответствующий «рисунок», как правило, рельефный. Как правило, рисунок содержит последовательность прямолинейных и параллельных участков, как правило, распределенных с существенной периодичностью вдоль направления по окружности, и/или плотную сетку смежных геометрических форм (в просторечии называемых «галечным краем»).
В настоящем описании и формуле изобретения под «рисунком» в более общем смысле понимается совокупность линейных элементов, расположенных на внутренней или наружной поверхности шины, при этом подобные линейные элементы образованы во время этапа формования в пресс-форме и вулканизации шины и, как правило, являются рельефными, но также могут иметь малую высоту или просто быть двумерными, то есть находиться на том же уровне по высоте, что и остальная поверхность. Например, канавки протектора подпадают под определение рисунка. Подобные поверхностные линейные элементы, как правило, представляют собой отрезки прямых, соединенные в непрерывной сетке, но в более общем случае могут иметь любую форму и/или распределение по поверхности. Такие поверхностные линейные элементы, как правило, вызывают изменение цвета и/или отражения/рассеяния падающего света по сравнению с остальной поверхностью.
Как правило, шина для колес транспортных средств имеет по существу тороидальную конструкцию относительно оси симметрии, совпадающей с осью вращения шины во время эксплуатации, и имеет осевую среднюю плоскость, ортогональную к оси симметрии, при этом указанная плоскость, как правило, представляет собой (по существу) геометрическую плоскость симметрии (если игнорировать любые незначительные асимметрии, такие как в рисунке протектора и/или компонентах внутренней структуры).
Под «внутренней поверхностью» шины понимается поверхность, проходящая внутри указанной тороидальной конструкции от одного до другого борта (другими словами, поверхность, больше не видимая после соединения шины с соответствующим монтажным ободом).
Внутренняя поверхность, как правило, принадлежит слою эластомерного материала, обычно называемому «герметизирующим слоем», имеющему оптимальные характеристики воздухонепроницаемости. Определенные дефекты на внутренней поверхности, такие как надрезы, стыки с зазором, пластические деформации и т.д., могут ухудшить воздухонепроницаемость шины.
В процессах изготовления шин для колес транспортных средств ощущается необходимость в выполнении контроля качества готовых изделий с целью предотвращения поставки на рынок дефектных шин и/или постепенного регулирования используемых устройств и оборудования для улучшения и оптимизации выполнения операций, выполняемых в производственном процессе.
Данные операции контроля качества включают, например, те, которые выполняются операторами, которые тратят фиксированное время на визуальную и тактильную проверку шины; если с учетом его собственного опыта и чувствительности оператор заподозрит, что шина не соответствует определенным стандартам качества, та же шина будет подвергнута дополнительным проверкам посредством более детального осмотра человеком и/или посредством соответствующего оборудования для более глубокой оценки любых недостатков с точки зрения конструкции и/или качества.
В документе WO 2013/045594 А1 описан быстрый способ анализа рельефных элементов на внутренней поверхности шины, включающий этапы: захвата трехмерного изображения поверхности с присвоением значения уровня серого каждому пикселю изображения, пропорционального топографической высоте данной точки, для получения начального изображения, преобразования захваченного изображения в системе ортогональных координат (OXY), в которой ось (ОХ) абсцисс отображает значения в направлении по окружности и ось (OY) ординат - значения в радиальном направлении, присвоения значения градиента (f(p)) высоты каждому пикселю на поверхности, сравнения его высоты с высотой малого числа дискретных точек, расположенных на прямой линии, проходящей через соответствующие пиксели (р) и ориентированной в направлении вдоль окружности.
В области контроля качества шин Заявитель поставил перед собой задачу обнаружения возможного наличия дефектов на поверхности шины посредством получения цифровых изображений оптическими средствами и их последующей обработки. Заявитель установил в результате наблюдений, что для использования контроля качества в едином масштабе времени с установкой для изготовления шин необходимо, чтобы сам контроль выполнялся за уменьшенное время и со сниженными затратами. В этом связи вычислительные потребности алгоритмов обработки данных играют решающую роль, поскольку при их избыточности продолжительность контроля увеличивается неприемлемым образом и/или требуемый объем вычислений делает контроль неосуществимым.
Под «цифровым изображением» или - в качестве эквивалента - «изображением», как правило, понимается набор данных, как правило, содержащихся в компьютерном файле, в котором каждый кортеж координат (как правило, каждая пара координат) из конечной совокупности (как правило, двумерной и матричной, то есть N строк x М столбцов) кортежей пространственных координат (при этом каждый кортеж соответствует пикселю) связан с соответствующим набором числовых значений (которые могут характеризовать различные величины). Например, в монохромных изображениях (таких как изображения в уровнях серого или в оттенках серого) такой набор значений состоит из одного значения на конечной шкале (как правило, 256 уровней или тонов), при этом данное значение характеризует, например, уровень светлоты (или интенсивности) соответствующего кортежа пространственных координат при отображении. Дополнительным примером являются цветные изображения, в которых набор значений характеризует уровень светлоты множества цветов или каналов, как правило, основных цветов (например, красного, зеленого и синего в кодировке RGB и голубого, пурпурного, желтого и черного в кодировке CMYK). Термин «изображение» необязательно означает его реальное отображение.
В настоящем описании и формуле изобретения термин «изображение» охватывает как трехмерные изображения, в которых каждому пикселю соответствуют данные о высоте поверхности (такие как изображения, полученные лазерной триангуляцией), так и двумерные изображения, в которых каждому пикселю соответствуют данные, характеризующие цвет и/или отражательную/рассеивающую способность соответствующей точки поверхности, такие как изображения, обнаруживаемые обычными цифровыми камерами или видеокамерами (например, ПЗС-камерами).
Под «точкой поверхности» понимается участок поверхности, имеющий малую (ненулевую) протяженность, совместимую с размером минимального элемента/пикселя полученного изображения поверхности.
В настоящем описании и формуле изобретения любая ссылка на конкретное «цифровое изображение» (например, цифровое изображение, первоначально полученное на шине) охватывает в более общем смысле любое цифровое изображение, получаемое посредством одного или более процессов цифровой обработки указанного конкретного цифрового изображения (например, таких как фильтрация, усреднение, сглаживание, бинаризация, сравнение с порогом, морфологические преобразования (открытие и т.д.), вычисления производных или интегралов и т.д.).
Заявитель отметил, что наличие рисунка на поверхности шины нарушает изображение и/или его обработку, поскольку он имеет тенденцию скрывать или маскировать дефекты.
Кроме того, по мнению Заявителя, аномалии на рисунке, которые сами по себе могут быть такими, которые не приводят к отбраковке шины, тем не менее, могут указывать на дополнительные дефекты на этапах производственного процесса (такие как отсутствие плотного прилегания между диафрагмой и шиной, приводящее к неполной вулканизации). Следовательно, Заявитель считает предпочтительным обнаружение любых аномалий самого рисунка.
В более общем смысле Заявитель считает предпочтительным наличие базовой модели рисунка, сформированного на поверхности шины и свободного от дефектов, например, для обеспечения возможности сравнения фактического рисунка с моделью для обнаружения любых реальных отклонений от данной модели или для обеспечения возможности отличить любые дефекты от самого рисунка.
Заявитель также осознал трудность, если не невозможность иметь на практике заданную модель, адекватную для некоторого числа шин, подлежащих анализу, служащую в качестве базы для свободного от дефектов рисунка, поскольку диафрагмы, как правило, различаются в зависимости от изготовителя и даже в зависимости от модели, и, кроме того, они подвержены старению и/или часто заменяются. Кроме того, возможные макроизменения также в освещении на этапе получения изображений и/или в отклике при отражении от поверхности шины могут сделать практически невозможным применение заданной модели рисунка, свободного от дефектов.
Следовательно, Заявитель применительно к контролю качества шин (в частности, для обнаружения дефектов на внутренней поверхности шин) на основе получения и обработки цифровых изображений на промышленной линии по производству шин при уменьшенных затратах на вычисления и сниженных вычислительных требованиях, при надежности в отношении полученного результата, а также высокой степени чувствительности при обнаружении дефектов, в частности, при обеспечении возможности обнаружения поверхностных дефектов даже при наличии поверхностного рисунка, включая дефекты самого рисунка, рассмотрел задачу разработки способа анализа поверхности шин, обеспечивающего возможность нахождения - для каждой анализируемой шины - соответствующей модели рисунка, свободного от дефектов, по меньшей мере, тогда, когда рисунок состоит из заданной схемы, которая повторяется множество раз по существу одинаковым образом.
В его первом аспекте изобретение относится к способу анализа поверхности шины, включающему:
а) выполнение шины, имеющей указанную поверхность, подлежащую анализу, при этом указанная поверхность имеет рисунок, имеющий схему, которая повторяется в множестве мест по существу одинаковым образом;
b) получение одного или более цифровых изображений участка поверхности, при этом указанный участок поверхности выбран так, чтобы указанный рисунок на указанном участке поверхности содержал указанную схему, повторяющуюся множество раз;
с) идентификацию множества первых зон указанных одного или более цифровых изображений, при этом каждая первая зона соответствует соответствующей подчасти схемы, при этом каждая первая зона содержит множество пикселей, характеризующихся соответствующими относительными координатами в указанной первой зоне;
d) идентификацию соответствующего множества зон указанных одного или более цифровых изображений, гомологичных каждой первой зоне, при этом каждая гомологичная зона содержит множество пикселей, характеризующихся соответствующими относительными координатами в указанной гомологичной зоне, и при этом соответствующая подчасть схемы в каждой гомологичной зоне по существу идентична указанной соответствующей подчасти схемы в указанной каждой первой зоне;
е) для каждой первой зоны расчет модели соответствующей подчасти схемы, при этом указанная модель подчасти схемы представляет собой цифровое изображение, в котором каждому пикселю соответствует среднее значение из значений, поставленных в соответствие пикселям указанной каждой первой зоны и соответствующих гомологичных зон, имеющим одинаковые относительные координаты указанного каждого пикселя, в результате чего получают множество расчетных моделей подчастей схемы;
f) получение модели указанного рисунка на указанном участке поверхности посредством объединения указанных расчетных моделей подчастей схемы.
Под «средним значением» понимается любая дескриптивная величина среднего значения соответствующего статистического распределения. Среднее значение, например, включает любое аналитическое среднее (которое удовлетворяет условию инвариантности) и любое среднее по положению или их комбинации. Примерами аналитического среднего являются среднее арифметическое, среднее геометрическое, среднее гармоническое, среднее квадратичное, среднекубическое и т.д., в то время как примером среднего по положению являются мода и медиана.
По мнению Заявителя, вышеприведенный способ, в частности, за счет идентификации соответствующих гомологичных зон и расчета среднего значения из значений, поставленных в соответствие пикселям каждой первой зоны и соответствующих гомологичных зон, имеющим одинаковые относительные координаты, позволяет создать модель рисунка, в которой значение, поставленное в соответствие каждому пикселю, вычислено при уменьшенном или нулевом вкладе каких-либо дефектов. Действительно, как правило, если дефект возникает, он имеется только на одной или самое большее на малом числе гомологичных зон, при этом все другие гомологичные зоны имеют по существу «корректную» схему, то есть свободную от дефектов (и самое большее имеют величину отклонения, определяемую незначительными искажениями). Дефект, как правило, генерирует изменение - даже существенное - соответствующего значения во всех пикселях, «пораженных» дефектом, только в гомологичной зоне, «пораженной» дефектом, по отношению к значению соответствующих пикселей остальных зон, свободных от дефектов. При вычислении среднего значения вклад дефекта размывается, при этом превалирует значение остальных «образцов» пикселей. Следовательно, в сравнении с умеренной потребностью в вычислениях вышеприведенный способ обеспечивает возможность самообучения при получении для каждой шины (то есть, получении из полученного изображения и/или его дальнейшей обработки при отсутствии необходимости в базовых изображениях или моделях рисунка) модели идеального рисунка (или ее частей), то есть свободного от дефектов, например, для последующего сравнения между полученным изображением (и/или его последующей обработкой) и моделью (и/или ее последующей обработкой).
Указанное множество первых зон предпочтительно образует соединенную часть указанных одного или более цифровых изображений, содержащую, по меньшей мере, указанную схему. Указанная соединенная зона предпочтительно имеет протяженность, менее чем в два раза превышающую указанную схему. Таким образом, модель всего рисунка рассчитывают при ограниченной вычислительной потребности.
Указанные первые зоны предпочтительно частично перекрываются друг с другом в аксиальном направлении и/или в направлении вдоль окружности шины. Таким образом, вводится определенная степень избыточности информации при воссоздании модели на краях зон.
Каждое множество гомологичных зон предпочтительно включает в себя все зоны указанных одного или более изображений, имеющие соответствующую подчасть схемы, по существу идентичную указанной подчасти схемы в соответствующей первой зоне. Таким образом, расчет модели учитывает все вклады, имеющиеся в начальном изображении.
Идентификация указанного соответствующего множества гомологичных зон предпочтительно включает вычисление функции корреляции между указанной соответствующей первой зоной и оставшейся частью (по меньшей мере, одним участком оставшейся части) указанных одного или более цифровых изображений. Таким образом, вычислительные требования ограничены.
Идентификация указанного соответствующего множества гомологичных зон предпочтительно включает идентификацию одного (по меньшей мере, локального) экстремума указанной функции корреляции. Таким образом, эффективно идентифицируются зоны, наиболее похожие друг на друга.
Указанный участок поверхности предпочтительно выбирают так, чтобы на указанных одном или более цифровых изображениях указанная схема повторялась, по меньшей мере, восемь раз по существу одинаковым образом, более предпочтительно, по меньшей мере, десять раз. Таким образом, расчетная модель схемы является достаточно устойчивой и надежной.
Как правило, схема повторяется по существу одинаковым образом в множестве мест, распределенных вдоль направления по окружности шины, и указанное соответствующее множество гомологичных зон распределено вдоль направления по окружности.
Как правило, схема повторяется по существу одинаковым образом вдоль направления периодичности (как правило, направления вдоль окружности) с по существу постоянным периодом, более предпочтительно с непрерывностью. Как описано выше, внутренняя поверхность (или протектор), как правило, имеет рисунок с рельефными элементами (или элементами с низким рельефом) согласно схеме, которая повторяется с существенной периодичностью и непрерывностью (то есть без интервалов, лишенных рисунка) вдоль указанного направления периодичности (обычно направления вдоль окружности).
Перед идентификацией соответствующего множества гомологичных зон предпочтительно предусмотрено получение значения, характеризующего указанный период, более предпочтительно предусмотрено получение значения, характеризующего указанный период, посредством обработки указанных одного или более цифровых изображений, еще более предпочтительно - посредством поиска максимума функции корреляции между участком указанных одного или более цифровых изображений и множеством дополнительных участков указанных одного или более цифровых изображений, имеющих размеры, равные размерам указанного участка указанных одного или более цифровых изображений, и распределенных вдоль направления периодичности (обычно направления вдоль окружности). Таким образом, способ путем самообучения получает значение периода, которое может быть использовано при идентификации гомологичных зон при значительной экономии вычислительных ресурсов. Указанный участок указанных одного или более цифровых изображений предпочтительно простирается вдоль указанного направления периодичности на длине, которая больше или равна общей длине схемы и меньше или равна трехкратной указанной общей длине схемы.
Идентификация указанного соответствующего множества гомологичных зон предпочтительно включает идентификацию соответствующей первой гомологичной зоны посредством вычисления указанной функции корреляции между указанной каждой первой зоной и множеством зон, имеющих размер, равный указанной каждой первой зоне, и расположенных вокруг точки указанных одного или более цифровых изображений, расположенной вдоль указанного направления периодичности на расстоянии от указанной каждой первой зоны, равном целому кратному указанного периода, более предпочтительно равном указанному периоду. Это предпочтительно резко уменьшает потребность в вычислениях при ограничении поиска гомологичных зон в узкой зоне, и в то же время при поиске в соответствующей окрестности устраняются любые отклонения от точного состояния периодичности по окружности и/или смещения в аксиальном направлении следующих друг за другом, гомологичных зон и/или их небольшие повороты (явления, которые, например, вызваны деформацией расширительной камеры пресс-формы).
В одном варианте осуществления идентификация указанного соответствующего множества гомологичных зон включает идентификацию соответствующей гомологичной зоны посредством использования указанной каждой первой зоны (например, для n-й соответствующей гомологичной зоны посредством вычисления указанной функции корреляции между указанной каждой первой зоной множеством зон, имеющих размер, равный указанной каждой первой зоне, и расположенных вокруг точки указанных одного или более цифровых изображений, расположенной вдоль указанного направления периодичности на расстоянии от указанной каждой первой зоны, равном указанному периоду, умноженному на n).
В альтернативном варианте осуществления идентификация указанного соответствующего множества гомологичных зон включает идентификацию последовательности соответствующих гомологичных зон последовательно, при этом каждую соответствующую гомологичную зону из указанной последовательности идентифицируют, используя соответствующую предшествующую гомологичную зону в последовательности (более предпочтительно - непосредственно предыдущую соответствующую гомологичную зону). Это предпочтительно позволяет учесть распространение деформаций (например, непериодичность и/или указанные смещения вдоль указанного направления периодичности).
В альтернативном варианте осуществления при расчете указанной модели соответствующей подчасти схемы указанное среднее значение содержит среднее арифметическое и/или геометрическое и/или квадратичное и/или моду и/или их комбинации или состоит из среднего арифметического и/или геометрического и/или квадратичного и/или моды и/или их комбинаций для указанных значений. Данные средние значения оказались достаточно устойчивыми к вкладам типовых дефектов.
В предпочтительном варианте осуществления указанное среднее значение содержит медианное значение или состоит из медианного значения из указанных значений. Таким образом, значение, поставленное в соответствие каждому пикселю модели подчасти схемы, вычисляют без какого-либо вклада каких-либо дефектов, поскольку последний имеет соответствующее значение, которое, как правило, находится за пределами (и удалено) от медианного значения из значений для соответствующих пикселей остальных зон, свободных от дефектов.
Получение одного или более цифровых изображений предпочтительно включает получение первого изображения, в котором каждому пикселю соответствует значение светлоты, характеризующее отражательную способность и/или рассеивающую способность и/или цвет точки на поверхности, соответствующей указанному каждому пикселю.
Точку на поверхности предпочтительно освещают рассеянным светом.
Следует отметить, что значение термина «значение светлоты» указывает на двумерный характер изображения, то есть свойство обычной фотографии, получение которой является простым и быстрым. Однако настоящее изобретение также применяется для трехмерных изображений.
В одном варианте осуществления указанную операцию получения значения, характеризующего период, и/или указанную операцию идентификации множества первых зон и соответствующего множества гомологичных зон выполняют на указанном первом изображении и посредством обработки указанного первого изображения (например, указанные функции корреляции вычисляют исходя из значений светлоты, поставленных в соответствие пикселям, или их обработки).
Получение одного или более цифровых изображений предпочтительно включает получение второго и третьего изображений, в которых каждому пикселю соответствует значение светлоты, характеризующее отражательную способность и/или рассеивающую способность и/или цвет точки поверхности, соответствующей указанному каждому пикселю, при этом указанную точку поверхности освещают светом, падающим под скользящим углом (например, образующим острый угол, превышающий 40°, более предпочтительно превышающий 55°, относительно нормали к поверхности в указанной точке), более предпочтительно - соответственно поступающим с противоположных направлений.
Получение одного или более цифровых изображений предпочтительно включает вычисление разностного изображения, в котором каждому пикселю соответствует значение, характеризующее разность соответствующих значений светлоты указанных второго и третьего изображений.
В предпочтительном варианте осуществления операцию получения значения, характеризующего указанный период, и/или операцию идентификации множества первых зон и соответствующего множества гомологичных зон (в частности, указанную операцию вычисления функции корреляции для получения периода или идентификации гомологичных зон) выполняют, по меньшей мере, на указанном разностном изображении посредством обработки указанного разностного изображения. Заявитель действительно обнаружил после неоднократных испытаний, что самообучение для получения периода и/или идентификации гомологичных зон посредством обработки изображения, представляющего собой разность изображений, полученных при свете, падающем под скользящим углом, (в частности, посредством вычисления указанной функции корреляции на разностном изображении) может быть более надежным по отношению к соответствующей обработке изображения, полученного при рассеянном свете. По мнению Заявителя, это обусловлено тем, что при получении разности двух изображений, полученных при свете, падающем под скользящим углом, с одной стороны, выделяются элементы рисунка/схемы, которые являются рельефными, и, с другой стороны, любые двумерные элементы (такие как пятна и т.д.), которые не являются частью рисунка/схемы, уменьшаются (даже вплоть до их исчезновения).
Идентификация каждой из указанных первых зон и указанного соответствующего множества гомологичных зон предпочтительно включает идентификацию - посредством обработки указанного разностного изображения - соответствующего положения указанной каждой первой зоны и указанных соответствующих гомологичных зон на указанном разностном изображении и последующую идентификацию - на указанном первом изображении - соответствующей первой зоны и соответственного соответствующего множества гомологичных зон, имеющих указанные соответствующие положения.
Указанную операцию вычисления указанной модели указанной соответствующей подчасти схемы предпочтительно выполняют на указанном первом изображении. Заявитель действительно удостоверился в том, что построение модели на основе изображения, полученного при в рассеянном свете, делает ту же модуль легко сопоставимой с изображением, полученным при рассеянном свете, например, для обнаружения дефектов.
В одном варианте осуществления для каждого пикселя, по меньшей мере, одного изображения из указанных одного или более цифровых изображений предусмотрено вычисление градиента указанных значений, поставленных в соответствие пикселям, вдоль двух координат (как правило, взаимно ортогональных) указанного изображения. Термин «градиент» в настоящее заявке используется в общем смысле для обозначения изменения значений, поставленных в соответствие пикселям, вдоль двух координат и необязательно применительно к дифференциальному исчислению. Указанный градиент предпочтительно представляет собой вектор с двумя составляющими, характеризующими изменение указанных значений соответственно вдоль указанных двух координат. Как правило, каждому пикселю соответствуют значение модуля градиента (например, характеризующее сумму квадратов указанных двух составляющих) и значение ориентации градиента (например, характеризующее угол, образованный указанным вектором относительно базового направления).
Ориентацию предпочтительно нормализуют в диапазоне [0-180°] или [-90° - +90°].
В предпочтительном варианте осуществления одну или более из указанных операций идентификации указанного множества первых зон, идентификации указанного соответствующего множества гомологичных зон, расчета указанной модели соответствующей подчасти схемы и расчета указанной модели рисунка выполняют на основе указанных значений модулей градиентов (например, указанные значения, поставленные в соответствие пикселям, представляют собой значения модулей градиентов, и указанные функции корреляции и/или указанное среднее значение вычисляют на основе указанных значений модулей градиентов).
В одном варианте осуществления одну или более из указанных операций идентификации указанного множества первых зон, идентификации указанного соответствующего множества гомологичных зон, расчета указанной модели соответствующей подчасти схемы и расчета указанной модели рисунка выполняют на основе указанных значений ориентаций градиентов (например, указанные значения, поставленные в соответствие пикселям, представляют собой значения модулей ориентации, и указанные функции корреляции и/или указанное среднее значение вычисляют на основе указанных значений модулей ориентации). Заявитель действительно удостоверился в том, что вышеуказанный способ обеспечивает надежные результаты при использовании значений модулей и/или ориентаций градиентов). В этом случае модель рисунка предпочтительно получают как результат, в котором каждому пикселю соответствуют значения модуля и/или ориентации градиента.
В альтернативном варианте осуществления для каждого пикселя модели рисунка (в значениях светлоты), рассчитанной на указанном первом изображении, предусмотрено вычисление значения модуля градиента и значения ориентации градиента для значений светлоты. Кроме того, таким образом получают модель рисунка, в которой каждому пикселю соответствуют значения модуля и/или ориентации градиента, аналогично способу по предыдущему абзацу.
В настоящем описании и формуле изобретения любое упоминание цифрового изображения (например, первого изображения, разностного изображения, модели соответствующей подчасти схемы или модели рисунка) понимается как охватывающее, если не указано иное, подобное изображение в значениях светлоты и/или в значениях модулей градиентов и/или в значениях ориентаций градиентов, вычисленных на основе значений светлоты.
Указанную модель рисунка предпочтительно получают заменой - на, по меньшей мере, одном изображении из указанных одного или более изображений (более предпочтительно на указанном первом изображении) - каждой первой зоны и соответствующих гомологичных зон указанной моделью соответствующей подчасти схемы. Таким образом (также с учетом деформаций, обнаруживаемых на реальном рисунке) получают полную модель рисунка без дефектов, которая может быть наложена на весь реальный рисунок на указанных одном или более изображениях.
Такая модель рисунка (например, когда рисунок занимает весь участок поверхности) предпочтительно может представлять собой глобальную модуль изображения участка поверхности, сопоставимую с указанным, по меньшей мере, одним из указанных одного или более цифровых изображений и содержащую полную модуль участка поверхности без дефектов, которая может быть наложена на указанные одно или более изображений.
Предпочтительно предусмотрены сравнение указанных одного или более цифровых изображений (более предпочтительно первого цифрового изображения) с указанной моделью рисунка и обнаружение возможных дефектов на указанных одном или более цифровых изображениях на основе такого сравнения.
Предпочтительно предусмотрен расчет расширенной модели рисунка посредством операции расширения, выполняемой на модели рисунка, более предпочтительно на основе указанных значений модулей градиентов для модели рисунка в значениях светлоты. Таким образом, изменения/дефекты/установившиеся отклонения в схеме реального рисунка учитываются с определенной степенью допуска при сравнении с начальным изображением.
Указанное расширение предпочтительно включает присвоение каждому пикселю расширенной модели рисунка максимального значения модуля градиента, вычисленного в заданной зоне вокруг соответствующего пикселя в указанной модели рисунка (при этом указанная зона предпочтительно имеет радиус от 3 до 10 пикселей).
Модель рисунка предпочтительно подвергают обработке до или после указанного расширения на основе указанного значения модуля градиента для получения бинарной модели (предпочтительно расширенной) рисунка, в которой каждому пикселю соответствует первый индекс (предпочтительно двоичный), значение которого характеризует то, принадлежит ли пиксель рисунку (предпочтительно расширенному) или нет. Заявитель действительно удостоверился в том, что бинаризация на основе модуля градиента (до или после расширения) является более надежной и/или создает меньше помех, чем, например, бинаризация на основе значений светлоты. Кроме того, таким способом предпочтительно получают бинарную модель (расширенную) рисунка, которую можно легко сопоставить с начальным изображением, например, для принятия решения о том, принадлежит ли определенный пиксель последнего рисунку или нет, возможно, в случае расширенной модели также с учетом допусков, неизбежных при возможных деформациях рисунка.
Каждому пикселю указанной расширенной бинарной модели рисунка, принадлежащему расширенному рисунку, предпочтительно поставлен в соответствие второй индекс, значение которого характеризует, по меньшей мере, локальную ориентацию части расширенного рисунка, проходящей через указанный пиксель. Таким образом получают модель рисунка, которая также обеспечивает возможность сравнения между ориентациями частей моделируемого рисунка и ориентациями частей (рисунка или потенциальных дефектов), имеющихся на полученном изображении.
Для каждого пикселя значение указанного второго индекса предпочтительно выбирают на основе значения (например, равным значению) ориентации градиента пикселя с максимальным значением модуля градиента в заданной окрестности указанного каждого пикселя в указанной модели рисунка. Таким образом также предпочтительно осуществляют расширение ориентации градиента в модели, что способствует получению высокомодульных пикселей в градиенте, что, как правило, соответствует состоянию пикселей, принадлежащих частям рисунка, и позволяет исключить низкомодульные пиксели в градиенте, которые менее существенны. Таким образом предпочтительно предотвращается ситуация, при которой на пересечениях между частями рисунка с разной ориентацией будет существовать ориентация части, которая «вторгается» в пересекающую часть, или приоритет отдается пересекающимся пикселям, в которых ориентация не имеет существенного значения.
Указанный участок поверхности предпочтительно представляет собой участок периферийной внутренней поверхности, более предпочтительно соответствующий углу в центре, который больше или равен 30°, более предпочтительно - больше или равен 60°, как правило, равен, по меньшей мере, одному полному углу.
Указанный участок периферийной внутренней поверхности предпочтительно имеет ширину в плоскости, через которую проходит указанная ось, превышающую или равную 50 мм, более предпочтительно - превышающую или равную 80 мм и/или меньшую чем или равную 200 мм, более предпочтительно - меньшую чем или равную 150 мм.
Способ предпочтительно повторяют посредством изменения каждый раз указанного участка периферийной внутренней поверхности так, чтобы все участки поверхности образовывали, по меньшей мере, одну половинную часть всей внутренней поверхности, которая проходит от средней плоскости до борта.
Способ предпочтительно включает выполнение анализа, описанного выше, при одновременном удерживании шины в состоянии, когда она опирается одной из боковин. Способ предпочтительно включает переворачивание шины так, чтобы опиралась противоположной боковиной, и повторение операций, описанных выше.
В соответствии с его вторым аспектом изобретение относится к устройству для анализа шин на линии по производству шин.
Устройство содержит:
- опору для шины, предпочтительно горизонтальную и предпочтительно выполненную с возможностью вращения вокруг оси, перпендикулярной к ней;
- по меньшей мере, один источник, выполненный с возможностью испускания, по меньшей мере, одного светового излучения для освещения участка поверхности шины, когда она установлена на опоре, и расположенную на расстоянии от указанного источника систему обнаружения, выполненную с возможностью определения интенсивности оптического светового излучения, отраженного и/или рассеянного указанным участком поверхности; и
- блок обработки данных, выполненный с возможностью осуществления способа согласно первому аспекту настоящего изобретения.
Система обнаружения предпочтительно содержит линейную камеру, имеющую линию объектива, лежащую в оптической плоскости, проходящей через линейную камеру.
Указанный, по меньшей мере, один источник предпочтительно включает в себя первый источник света, второй источник света и третий источник света, выполненные с возможностью испускания соответственно первого, второго и третьего световых излучений для освещения указанного участка поверхности, более предпочтительно - линейного участка поверхности, совпадающего с линией объектива или близкого к ней.
Указанные первый источник света и второй источник света предпочтительно расположены соответственно с противоположных сторон относительно указанной оптической плоскости.
Каждый из указанных первого и второго источников света предпочтительно выполнен с возможностью освещения указанной линии объектива соответствующим светом, падающим под скользящим углом, и указанный третий источник света выполнен с возможностью освещения указанной линии объектива рассеянным светом.
В одном варианте осуществления система обнаружения содержит зеркало, имеющее отражающую поверхность, расположенную рядом с третьим источником света перпендикулярно к оптической плоскости и пересекающую последнюю (как правило, по средней линии зеркала) так, чтобы отражать указанную линию объектива в оптической плоскости под углом, который больше или равен 30° или меньше или равен 135°. Таким образом, во время контроля внутренней поверхности шины линейная камера предпочтительно остается расположенной в центральной зоне шины, в то время как группа с источниками света функционирует рядом с внутренней поверхностью.
Устройство предпочтительно содержит блок управления и регулирования, выполненный с возможностью:
- включения указанных первого источника света, второго источника света и третьего источника света в чередующейся последовательности; и
- приведения в действие указанной линейной камеры для получения соответственно указанных первого, второго и третьего изображений синхронно с включением соответственно указанных первого источника света, второго источника света и третьего источника света. Таким образом, можно получить как изображение при рассеянном свете, так и два изображения при свете, падающем под скользящим углом.
Устройство предпочтительно включает в себя элемент для обеспечения перемещения, выполненный с возможностью вращения указанной опоры вокруг ее оси вращения, при этом блок управления и регулирования выполнен с возможностью управления указанным элементом для обеспечения перемещения.
Дополнительные признаки и преимущества станут более очевидными из подробного описания некоторых иллюстративных, но неограничивающих вариантов осуществления способа и устройства для анализа поверхности шины на линии по производству шин согласно настоящему изобретению. Такое описание будет приведено в дальнейшем со ссылкой на сопровождающие фигуры, представленные только в целях иллюстрации и, следовательно, не для ограничения, на которых:
фиг.1 - схематическое изображение устройства для анализа поверхности шин согласно настоящему изобретению в виде функциональных блоков;
фиг.2 - схематическое изображение части устройства согласно настоящему изобретению в соответствии с вариантом осуществления;
фиг.3-14 - некоторые этапы способа с использованием визуального представления соответствующих цифровых изображений; и
фиг.15 - схема последовательности операций способа по настоящему изобретению.
На чертежах ссылочная позиция 1 обозначает в целом устройство для анализа поверхности шин на линии по производству шин согласно настоящему изобретению.
Устройство 1 содержит опору 102, выполненную с возможностью обеспечения опоры для шины 200 на боковине и вращения шины вокруг оси 201 вращения, совпадающей с осью вращения шины и, как правило, расположенной в соответствии с вертикалью. Опора 102, как правило, приводится в действие приводным элементом, не описанным и не показанным дополнительно, поскольку он в качестве примера может быть приводным элементом известного типа.
Устройство 1 содержит источник 104, выполненный с возможностью испускания, по меньшей мере, одного светового излучения для освещения участка поверхности шины, установленной на опоре, и расположенную на расстоянии от указанного источника систему 105 обнаружения, выполненную с возможностью определения интенсивности оптического светового излучения, отраженного и/или рассеянного участком поверхности.
Система 105 обнаружения содержит камеру, предпочтительно линейную и имеющую линию 106 объектива, лежащую в оптической плоскости 107, проходящей через линейную камеру и ось 201 вращения.
Источник 104 содержит первый источник 108 света, второй источник 109 света и третий источник 110 света, выполненные с возможностью испускания соответственно первого, второго и третьего световых излучений для освещения линейного участка 211 поверхности указанной шины, совпадающего с линией объектива (например, когда участок поверхности является плоским) или расположенного вблизи линии объектива (вследствие криволинейного тренда поверхности шины).
Система 105 обнаружения выполнена с возможностью получения соответствующего двумерного цифрового изображения линейного участка поверхности, освещенного посредством, по меньшей мере, одного из первого, второго и третьего световых излучений.
Устройство, как правило, содержит роботизированную руку (непоказанную), на которой смонтированы первый, второй и третий источники света и система обнаружения.
Каждый из первого источника 108 света и второго источника 109 света предпочтительно состоит из одного соответствующего подысточника 111 и 112. Третий источник 110 света предпочтительно состоит из четырех соответствующих подысточников 113, распределенных с обеих сторон оптической плоскости 107 и симметрично относительно такой плоскости.
Каждый подысточник 111-113 имеет соответствующее основное направление протяженности, которое проходит параллельно оптической плоскости 107 и, следовательно, линии 106 объектива.
Каждый подысточник, как правило, содержит множество светодиодных источников света, расположенных с выравниванием вдоль основного направления протяженности.
На фиг.2 подысточники света схематически показаны на основе их соответствующей излучающей поверхности (имеющей в качестве примера прямоугольную форму), которая может, например, совпадать с прозрачным защитным и/или рассеивающим стеклом. В качестве примера подысточники имеют размер вдоль основного направления протяженности, равный 6 см, и размер вдоль направления, ортогонального к основному направлению протяженности, равный приблизительно 1 см.
Подысточники 111 и 112 предпочтительно находятся соответственно с противоположных сторон относительно оптической плоскости и на одинаковом расстоянии от нее.
Расстояние от подысточников 113 третьего источника света до оптической плоскости 107 предпочтительно меньше, чем расстояние между каждым подысточником указанных первого источника света и второго источника света и оптической плоскостью.
Третий источник 110 света предпочтительно выполнен с возможностью освещения линии объектива рассеянным светом (например, соответствующий угол, имеющий вершину в каждой точке линии объектива и лежащий в плоскости, ортогональной к линии объектива, и стягиваемый третьим источником света, равен приблизительно 80°).
В варианте осуществления устройства, выполненном с возможностью контроля в особенности внутренней поверхности шины, показанном в качестве примера на фиг.2, система обнаружения включает в себя зеркало 150 (как правило, также смонтированное на роботизированной руке), имеющее плоскую отражающую поверхность, расположенную рядом с третьим источником света перпендикулярно к оптической плоскости и пересекающую последнюю по средней линии зеркала, для отражения линии объектива в оптической плоскости под углом, в качестве примера равным 90°.
Предпочтительно предусмотрен блок 140 управления и регулирования, выполненный с возможностью включения первого, второго и третьего источников света в чередующейся последовательности и управления линейной камерой для получения соответственно первого, второго и третьего изображений синхронно с включением соответственно первого, второго и третьего источников света.
Блок управления и регулирования, как правило, также выполнен с возможностью управления элементом для манипулирования опорой 102.
Устройство содержит блок обработки данных (например, встроенный в блок 140 управления и регулирования или связанный с ним или с системой 105 обнаружения для приема указанных полученных изображений), выполненный с возможностью осуществления способа согласно настоящему изобретению.
При эксплуатации шину 200 размещают на опоре 102 и подвергают (предпочтительно полному) повороту вокруг ее оси 201 симметрии для формирования двумерного цифрового изображения участка внутренней поверхности, предпочтительно вдоль всей развертки окружности.
Во время поворота блок управления и регулирования циклически включает в последовательности с быстрым чередованием указанные первый, второй и третий источники света и приводит в действие линейную камеру для получения соответствующего двумерного линейного цифрового изображения (цветного или монохромного) соответствующего линейного участка поверхности синхронно с включением соответственно первого, второго и третьего источников света. В качестве примера каждое одно линейное цифровое изображение содержит 1×2048 пикселей в случае монохромной камеры или 2×2048 пикселей в случае RGB-цветной или билинейной камеры.
В качестве примера временная задержка между приемом первого и приемом второго линейных изображений, а также между вторым и третьим линейными изображениями и далее циклически между первым и третьим линейными изображениями составляет менее 0,2 миллисекунды.
Как только будет выполнен заданный поворот шины для сканирования заданного участка поверхности, предпочтительно, по меньшей мере, один полный поворот для получения всей развертки окружности, получают специфическое цифровое изображение, образованное посредством всех линейных цифровых изображений последовательности линейных участков, каждый из которых освещался тремя источниками света.
Блок обработки данных получает такое изображение от системы обнаружения и отделяет от него соответствующие первое, второе и третье изображения всего заданного участка поверхности.
Такие изображения могут быть по существу попиксельно наложены друг на друга, несмотря на то, что реальный линейный участок поверхности, соответствующий одному линейному изображению, не имеет точного соответствия трем изображениям вследствие вращения шины, происходящего тем временем. Однако выбор частоты приема линейных изображений и скорости вращения таков, что три линейных изображения взаимно перемежаются и, следовательно, попиксельно сопоставимы.
Фиг.3 показывает иллюстративное визуальное представление в серой шкале примера указанного первого изображения, то есть полученного в диапазоне видимого спектра частот, двумерного цифрового изображения участка внутренней поверхности шины, освещенного рассеянным светом (полностью аналогичного обычному черно-белому изображению). Направление вдоль окружности шины проходит вдоль горизонтального направления на фигуре (прямая линия 300).
В примере на фиг.3 каждому пикселю цифрового изображения поставлена в соответствие скалярная величина (уровень или шкала серого) на шкале из 255 уровней, непосредственно характеризующая отражающую способность и/или рассеивающую способность и/или цвет точки внутренней поверхности, соответствующей рассматриваемому пикселю.
Настоящее изобретение также может применяться для цифровых изображений, в которых каждому пикселю соответствует векторная величина, таких как цифровые цветные изображения. Например, способ, описанный в данном документе, может выполняться для каждого канала/цвета или их комбинаций или для выбранного канала (например, зеленого, который предпочтительно обеспечивает лучшее качество изображения).
Цифровое изображение, для которого выполняется способ, описанный в данном документе, может совпадать с цифровым изображением, непосредственно сформированным системой обнаружения, или в более предпочтительном варианте перед выполнением способа, описанного в данном документе, может быть подвергнуто предварительной обработке для повышения его качества. Указанная предварительная обработка может включать одну или более из операций фильтрации, усреднения, снижения уровня помех, сглаживания, например, как известно в уровне техники. В дальнейшем предполагается, что такая предварительная обработка не изменяет двумерного цифрового характера изображения, так что каждому пикселю соответствует значение светлоты (или тона), характеризующее отражающую способность и/или рассеивающую способность и/или цвет внутренней поверхности.
Как видно на фиг.3, внутренняя поверхность шины имеет канавки за счет множества рельефных элементов, которые образуют «рисунок». Наличие рельефных элементов вызывает изменение отражающей способности внутренней поверхности, обнаруживаемой камерой. Настоящее изобретение также применимо для рисунков с низким рельефом или просто двумерных рисунков, то есть имеющих только изменение цвета и/или отражающей способности и не имеющих глубины. Как правило, рисунок содержит последовательность прямолинейных частей 301, по существу параллельных друг другу, как правило, распределенных с существенной периодичностью вдоль направления по окружности, и плотную сетку (называемую в просторечии «галечным краем») по существу прямолинейных отрезков 302, соединенных друг с другом в виде по существу непрерывной сетки, при этом рисунок, как правило, характеризуется его существенной периодичностью вдоль направления по окружности. Следует отметить, что рисунок продолжается на внутренней поверхности шины, которая получена с ее собственной кривизной.
Рисунок предпочтительно состоит из замкнутых ломаных линий (многоугольников), соединенных друг с другом. Как правило, рисунок состоит из многоугольников, примыкающих друг к другу, (например, не имеет изолированных многоугольников).
Рисунок имеет схему, которая повторяется по существу одинаковым образом в множестве мест, распределенных вдоль направления по окружности, как правило, с существенной периодичностью в направлении вдоль окружности (например, с локальным изменением периода по абсолютной величине, находящимся в пределах 5% от среднего периода, рассчитанного для всего изображения), даже более типично - с непрерывностью вдоль всего цифрового изображения. В показанном примере галечный край имеет периодичность в направлении вдоль окружности, равную удвоенной периодичности «нарезов», при этом общая периодичность рисунка равна периодичности галечного края.
Как указано выше, рельефные элементы 301, 302 представляют собой оттиск, оставленный пневматической диафрагмой. На практике указанная схема, как правило, повторяется вдоль направления по окружности с незначительными изменениями периодичности и/или формы и/или ориентации и/или осевого положения, при этом, остающиеся по существу одинаковыми, подобные изменения обусловлены, например, неравномерностью расширения и/или неодинаковой установкой диафрагмы и/или незначительными искажениями рисунка, образованными вдавливанием на самой диафрагме, и/или искажениями в процессе формирования изображения (например, вследствие некорректного центрирования оси вращения шины, неидеальной круглостью шины и т.д.).
Для большей ясности фиг.3 показывает часть цифрового изображения с длиной вдоль направления 300 по окружности, превышающей приблизительно только в два с половиной раза период рисунка, однако, как правило, обработанное цифровое изображение соответствует участку периферийной внутренней поверхности, содержащему указанную схему, повторяющуюся, по меньшей мере, восемь-десять раз. Обработанный участок периферийной внутренней поверхности предпочтительно охватывает развертку всей окружной внутренней поверхности шины.
Как правило, обработанное цифровое изображение соответствует участку внутренней поверхности, имеющему длину в аксиальном направлении (направлении, перпендикулярном направлению 300 на фиг.3), составляющую, по меньшей мере, 5 см, предпочтительно равную, по меньшей мере, половине протяженности всей развертки коронной зоны шины в аксиальном направлении.
Фиг.3 показывает иллюстративный дефект 303 (показанный увеличенным на фиг.3а, которая показывает повернутый фрагмент фиг.3), состоящий из надреза, который пересекает, по меньшей мере, один сегмент рисунка.
Способ предпочтительно обеспечивает получение значения, характеризующего период рисунка, посредством обработки цифрового изображения, например, путем поиска максимума функции автокорреляции (например, коэффициента корреляции Пирсона, рассчитанного на основе значений, соответствующих пикселям изображения) между заданной частью (называемой на жаргоне «опорой») цифрового изображения (имеющей соответствующие размеры, например, окружную длину, которая больше периода и меньше трехкратного периода) и множеством дополнительных частей цифрового изображения, имеющих размеры, равные размерам указанной заданной части изображения, и расположенных в местах, распределенных по окружности. Функцию автокорреляции в направлении вдоль окружности предпочтительно неоднократно вычисляют на основе множества различных опор, частично перекрывающихся в аксиальном направлении изображения и имеющих одинаковые размеры, с целью выбора наиболее надежного максимума функции автокорреляции для идентификации периода рисунка. В альтернативном варианте предусмотрено получение заданного значения периода, например, из измерений и/или из технических характеристик диафрагмы.
Способ включает идентификацию первой зоны 304 цифрового изображения, которая соответствует подчасти схемы, например, имеющей меньшую протяженность вдоль окружности, чем вся протяженность схемы вдоль окружности, (в примере равную приблизительно одной трети протяженности схемы вдоль окружности, совпадающей с указанным периодом). Размеры первой зоны предпочтительно соответствуют типовым ожидаемым размерам дефекта, подлежащего поиску.
Кроме того, предусмотрена идентификация соответствующего множества зон 305, 306 цифрового изображения, гомологичных первой зоне 304 и распределенных вдоль направления по окружности. Каждая гомологичная зона содержит соответствующую подчасть схемы, по существу идентичную подчасти схемы в первой зоне. Для этого вычисляют функцию корреляции (например, коэффициент корреляции Пирсона) между первой зоной и частью остального цифрового изображения. Первую гомологичную зону 305 сначала предпочтительно идентифицируют посредством вычисления функции корреляции между первой зоной 304 и множеством зон, имеющих размеры, равные первой зоне, и расположенных в окрестности точки цифрового изображения, которая удалена в направлении вдоль окружности от первой зоны на расстояние, равное периоду Р. Например, если координаты центра первой зоны 304 представляют собой x0, y0, сначала идентифицируют зону с равными размерами, имеющую координаты x0, y0+Р центра. Затем вычисляют функцию корреляции между первой зоной и всеми зонами с такими же размерами, центр которых расположен в окрестности с координатами x0±Δx, y0+Р±Δy, при этом Δx, Δy равны соответствующему числу пикселей, например, 5-10 пикселям. Зону, имеющую координаты x1, y1 центра, в которой функция корреляции имеет максимум (по меньшей мере, локальный), идентифицируют как первую гомологичную зону 305.
Алгоритм повторяют, начиная с первой гомологичной зоны 305 и при поиске максимума функции корреляции в окрестности с координатами x1±Δx, y1+Р±Δy для определения местоположения второй гомологичной зоны 306 (имеющей координаты x2, y2 центра) и так далее, итерационно для последовательной идентификации последовательности гомологичных зон. В частности, вычисляют кортеж координат xn, yn, соответствующих центру (или любой другой базовой точке) кортежа гомологичных зон.
В примере, описанном в данном документе, получение значения, характеризующего период рисунка, посредством обработки цифрового изображения, и идентификация такого кортежа координат выполняются на изображении, полученном при рассеянном свете (типа, показанного на фиг.3).
Однако Заявитель удостоверился в том, что еще более надежные результаты могут быть получены, если операции вычисления периода и/или идентификации подобного кортежа (например, идентификации гомологичных зон посредством автокорреляции) выполняются на разностном изображении, в котором каждому пикселю поставлено в соответствие значение, характеризующее разность соответствующих значений светлоты второго и третьего изображений, полученных при свете, падающем под скользящим углом, как описано выше.
Этот кортеж координат затем показывают на первом изображении, полученном при рассеянном свете, для идентификации соответствующей первой зоны и соответствующего множества гомологичных зон на указанном первом изображении.
Дополнительно предусмотрен расчет модели подчасти схемы, в которой каждому пикселю поставлено в соответствие среднее значение из значений, поставленных в соответствие пикселям первой зоны и соответствующих гомологичных зон первого изображения, имеющим одинаковые координаты указанного каждого пикселя.
Для этого в целях иллюстрации фиг.4 показывает трехмерное графическое изображение комплекта 307 зон, полученного перекрытием первой зоны (например, в основании комплекта) и всех соответствующих ей, гомологичных зон первого изображения, полученного в рассеянном свете. Как можно видеть, каждый пиксель в основании комплекта соответствует набору статистических значений (скалярных, или на шкале серого), находящемуся в соответствующем вертикальном столбце. Такой статистический набор имеет свойственную ему дисперсию вследствие деформаций, описанных выше.
Цифровую модель 308 подчасти схемы (показанной на фиг.5) соответствующей первой зоне 304, предпочтительно рассчитывают с учетом медианного значения соответствующего статистического набора для каждого пикселя основания комплекта. Таким образом, генерируется модель 308, которая имеет в каждом пикселе (i, j) с относительными координатами медианное значение (например, уровень серого), вычисленное на всех пикселях (i, j) с относительными координатами из набора из первой зоны и гомологичных зон. Как можно видеть на фиг.5, модель, рассчитанная таким образом, не содержит вкладов от каких-либо дефектов, а также имеет высокое качество изображения (например, с точки зрения шумов и/или резкости).
Цифровую модель соответствующей подчасти схемы предпочтительно рассчитывают в соответствии с вышеизложенным для множества первых зон, каждая из которых содержит соответствующую подчасть схемы. Первые зоны формируют соединенную часть цифрового изображения, имеющую протяженность в направлении вдоль окружности, приблизительно равную периоду. Таким образом, цифровую модель рассчитывают для всей схемы, которая образует рисунок. Первые зоны предпочтительно частично взаимно перекрываются в аксиальном направлении и/или в направлении вдоль окружности для повышения надежности способа.
Как только модели соответствующих подчастей будут построены, модель рисунка получают заменой - на указанном первом изображении - каждой первой зоны и соответствующих гомологичных зон указанной моделью соответствующей подчасти схемы. Посредством вышеуказанной процедуры самообучения получают изображение, которое представляет собой глобальную модель участка поверхности без дефектов, которую можно легко сопоставить с фактическим изображением.
Для данного сравнения предпочтительно использовать модуль и ориентацию градиента, как описано в дальнейшем.
В одном варианте осуществления для каждого пикселя модели рисунка в значениях светлоты, вычисленных на первом изображении, предусмотрено вычисление значения модуля и значения ориентации градиента значений светлоты, поставленных в соответствие пикселям, в результате чего получают модель рисунка соответственно в значениях модулей градиентов и значениях ориентаций градиентов. Для уменьшения использования вычислительных ресурсов предпочтительно вычислять данные значения модулей градиентов и ориентаций градиентов на модели каждой подчасти схемы в значениях светлоты и затем переходить к вышеуказанной операции получения модели рисунка путем замены.
В альтернативном и предпочтительном варианте осуществления операции, описанные выше и предназначенные для идентификации гомологичных зон и расчета модели соответствующей подчасти схемы (предпочтительно посредством использования кортежа координат, идентифицированных на разностном изображении), выполняются на основе значений модулей градиентов и на основе значений ориентаций градиентов, вычисленных на первом изображении в значениях светлоты. В этом случае отсутствует строгая необходимость расчета модели рисунка в значениях светлоты на первом изображении.
Для вычисления значений модулей и ориентаций градиентов градиент значений светлоты вычисляют для каждого пикселя цифрового изображения вдоль двух горизонтальных и вертикальных координат изображения, в результате чего получают вектор с двумя составляющими: модулем (например, корнем суммы квадратов двух составляющих) и ориентацией на цифровом изображении (например, углом, образуемым вектором относительно горизонтального направления), нормализованной в диапазоне [0-180°] или [-90° - +90°].
Для вычисления значений модуля и ориентации градиента, например, делают следующее: при каждом пикселе I(x,y) вводимого изображения (обозначение (x,y) опускают при отсутствии необходимости) вычисляют следующее:
- Ix=I * Kx, где |*| - оператор свертки, и Kx - соответствующее ядро для вычисления первой производной по х (например, Kx=[1 -1]
- Iy=I * Ky, где |*| - оператор свертки, и Ky - соответствующее ядро для вычисления первой производной по y (например, Ky=[1; -1]
- Grad(x,y)=[Ix; Iy]=градиент I(x,y)
- модуль градиента=sqrt((Ix)∧2+(Iy)∧2)
- ориентация градиента=arctan (Iy/Ix)
Фиг.6 показывает иллюстративную визуализацию подчасти поверхности, которая соответствует центральной части изображения на фиг.3, в котором каждому пикселю соответствует уровень серого, характеризующий модуль градиента (например, пропорциональный модулю градиента) в рассматриваемом пикселе (например, светлые пиксели соответствуют высокому модулю градиента и наоборот).
Фиг.7 показывает иллюстративную визуализацию той же подчасти поверхности на фиг.6, в которой каждому пикселю соответствует уровень серого, однозначно характеризующий ориентацию градиента в рассматриваемом пикселе.
Сравнение между фиг.6 и 7 показывает, что зоны с низким модулем градиента за пределами рисунка отличаются несущественным значением ориентации (переменной неупорядоченности).
Как указано выше, при выполнении нижеуказанных операций на цифровых изображениях, показанных на фиг.6 и 7, идентификации множества первых зон, идентификации для каждой первой зоны соответствующего множества гомологичных зон и расчете соответствующей модели модель рисунка получают соответственно в значениях модулей градиентов и значениях ориентаций градиентов.
В этот момент получающаяся в результате модель рисунка (независимо от того, получена ли она в значениях светлоты и/или значениях модулей и/или значениях ориентаций градиентов) подвергается расширению для ввода допуска, который учитывает деформации и/или устойчивые отклонения схемы в рисунке.
В первом предпочтительном варианте осуществления модель рисунка в значениях модулей градиентов сначала подвергают бинаризации (например, посредством сравнения с одним или двумя пороговыми значениями) для получения бинарной модели рисунка.
Такая бинарная модель рисунка подвергается расширению (например, посредством операции морфологической обработки) для получения расширенной бинарной модели рисунка, в которой пиксели имеют соответствующий первый бинарный индекс, значение которого указывает на то, принадлежит ли пиксель соответствующим расширенным рисункам или нет (для того, чтобы отличить пиксели, принадлежащие фону, от пикселей, принадлежащих расширенному рисунку первого изображения, путем сравнения с такой расширенной бинарной моделью).
Кроме того, также значения ориентаций градиентов модели рисунка предпочтительно подвергают расширению. Каждому пикселю расширенной бинарной модели рисунка, принадлежащему расширенному рисунку, предпочтительно ставят в соответствие второй индекс, значение которого характеризует ориентацию части расширенного рисунка, проходящей через пиксель: например, может быть выбрано значение ориентации градиента пикселя, имеющего максимальное значение модуля градиента в заданной окрестности (например, с радиусом, равным 5-10 пикселям) каждого указанного пикселя в указанной модели рисунка.
Во втором альтернативном варианте осуществления как значения модулей градиентов, так и значения ориентаций градиентов в модели рисунка сначала подвергают расширению. Например, каждому пикселю расширенной модели рисунка присваивают в качестве значения модуля градиента максимальное значение модуля градиента в заданной окрестности указанного пикселя в модели рисунка (при этом указанная окрестность в качестве примера имеет радиус, равный 5-10 пикселям) и в качестве значения ориентации градиента то, которое соответствует пикселю, имеющему указанное максимальное значение модуля градиента. Впоследствии модель рисунка, полученную таким образом, подвергают бинаризации на основе значения модуля градиента, получая, тем самым, значение указанного первого индекса.
Фиг.8 показывает пример модели рисунка, полученной в результате указанных операций в двух вариантах осуществления. Каждый пиксель изображения на фиг.8, не принадлежащий расширенному рисунку, но принадлежащий фону рисунка (например, имеющий значение указанного первого индекса, равное нулю), показан черным цветом. Каждый пиксель, принадлежащий расширенному рисунку (например, имеющий значение указанного первого индекса, равное единице), показан с уровнем серого, отличным от черного, при этом каждый уровень серого взаимно однозначно соответствует значению второго индекса, характеризующего ориентацию соответствующего сегмента расширенного рисунка, проходящего через рассматриваемый пиксель. Как можно видеть, пиксели снаружи расширенного рисунка (черные пиксели) не имеют соответствующей значимой величины второго индекса.
Перед выполнением сравнения между первым изображением шины, полученным при рассеянном свете в значениях светлоты, и расширенной моделью рисунка, полученной выше, предпочтительно обработать такое первое изображения для выделения потенциальных дефектов остальной части изображения.
Для содействия описанию способа выделения потенциальных дефектов будет сделана ссылка на фиг.9-12.
Фиг.9 иллюстративно показывает визуальное изображение дополнительного примера части первого изображения в серой шкале, аналогичное показанному на фиг.3 и 3а, показывающее дополнительный участок внутренней поверхности шины, освещенный рассеянным светом, на котором имеется дефект 903, состоящий из надреза, который пересекает некоторые сегменты рисунка. На участке поверхности на фиг.9 были следы разделительного средства, используемого на диафрагме, в частности, на стенках сегментов рисунка. Поскольку данное разделительное средство обладает высокой отражательной способностью, такие стенки сегментов рисунка на изображении вызывают появление двух очень ярких параллельных линий 904. Более темная линия 905 имеется между данными двумя яркими линиями, которые соответствуют «верху» сегментов рисунка, менее загрязненному разделительным средством. В такой ситуации сегменты 905 в принципе можно спутать с надрезами 903, поскольку они имеют аналогичные характеристики светлоты.
Для выделения потенциальных дефектов из остальной части изображения предусмотрено вычисление значения, характеризующего основное собственное значение (или максимальное собственное значение) гессиана в указанном пикселе, для каждого пикселя первого изображения в значениях светлоты.
В качестве примера гессиан вычисляют следующим образом. При каждом пикселе вводимого изображения с координатами I(x,y), как указано выше, вычисляют следующее:
- Ixx=I * Kxx, где |*| - оператор свертки, и Kxx - соответствующее ядро для вычисления второй производной по х (например, Kxx=вектор-строка [1 -2 1])
- Iyy=I * Kyy, где |*| - оператор свертки, и Kyy - соответствующее ядро для вычисления второй производной по y (например, Kyy=вектор-столбец [1; -2; 1])
- Ixy=Iyx=I * Kxy, где |*| - оператор свертки, и Kxy - соответствующее ядро для вычисления смешанной производной
(например, матрица Kxy - [1 0 -1; 0 0 0; -1 0 1], где ʺ;ʺ - разделитель строк).
Таким образом получают гессиан Н=[Ixx Ixy; Iyx Iyy].
Исходя из гессиана Н вычисляют собственные векторы и собственные значения, например, посредством алгоритма EVD (декомпозиции собственных значений/векторов).
Основные собственные значения предпочтительно подвергают бинаризации посредством сравнения с первым пороговым значением для идентификации пикселя предполагаемого дефекта, подобного тем пикселям, соответствующее максимальное собственное значение которых выше такого первого порогового значения.
Фиг.10 показывает иллюстративную визуализацию части первого изображения, по существу соответствующей той, которая показана на фиг.9, подвергнутой бинаризации на основе основного собственного значения. Следует отметить, что указанная бинаризация обеспечила увеличение как пикселей, принадлежащих надрезу 903, так и пикселей стенок 904 (более точно, переходных зон между фоном рисунка и стенками 904) и центральных зон 905 сегментов 905 рисунка, в которых максимальное собственное значение является высоким.
Для исключения, по меньшей мере, пикселей в переходных зонах между фоном рисунка и стенками сегментов рисунка из предполагаемых дефектов, полученных таким образом, а также других ложных/случайных пикселей предусмотрены сравнение значений модулей градиентов, вычисленных на основе значений светлоты первого изображения, со вторым пороговым значением, а также идентификация пикселей со значением модуля градиента, которое меньше такого второго порогового значения, в качестве предполагаемых дефектов.
Фиг.11 по существу показывает ту же часть изображения на фиг.9, в которой пиксели были подвергнуты бинаризации на основе модуля градиента (при необходимости при соответствующих операциях сглаживания края). Белые пиксели - это пиксели с низким значением модуля градиента, то есть меньшим, чем второе пороговое значение. Следует отметить, что пиксели 904 на краях сегментов рисунка имеют высокое значение градиента.
Фиг.12 по существу показывает ту же часть изображения, что и на фиг.10, в которой белые пиксели представляют собой предполагаемые дефекты, полученные из совпадающего по времени сравнения с указанными двумя пороговыми значениями (то есть белые пиксели как на фиг.10, так и на фиг.11). Следует отметить, что некоторые пиксели 905 остаются в качестве предполагаемых дефектов в центре некоторых частей рисунка, в то время как почти все пиксели на краях частей рисунка были по существу отфильтрованы посредством критерия.
Для дополнительного отбора предполагаемых дефектов предпочтительно предусмотрен третий критерий выбора, предпочтительно используемый в комбинации с указанными двумя дополнительными критериями, основанный на значении светлоты в изображении, полученном при рассеянном свете. В частности, такое значение светлоты сравнивают с третьим пороговым значением, и выбирают все пиксели предполагаемых дефектов, идентифицированные выше, которые также имеют значение светлоты ниже третьего порогового значения.
В этот момент можно выполнить сравнение между пикселями предполагаемых дефектов, выбранными таким образом, с расширенной моделью рисунка, свободной от дефектов, рассчитанной выше, для обнаружения любых дефектов на участке поверхности в зависимости от такого сравнения.
Первый набор пикселей предпочтительно идентифицируют среди указанных пикселей предполагаемых дефектов, в случае которых соответствующие пиксели в расширенной модели рисунка не принадлежат расширенному рисунку (например, черные «фоновые» зоны, показанные на фиг.8), для идентификации дефектов (или частей дефектов), находящихся снаружи рисунка, то есть принадлежащих «фону» рисунка.
Предпочтительно предусмотрена идентификация второго набора пикселей среди указанных пикселей предполагаемых дефектов, который имеет соответствующий пиксель в модели рисунка, принадлежащий рисунку (например, пиксели с уровнем серого, отличным от черного на фиг.8), для которого данная, по меньшей мере, локальная ориентация части рисунка, проходящей через указанную расширенную модель рисунка (представленную указанным вторым значением, например, значением ориентации расширенного градиента), значительно отличается (например, разница превышает 20°) от ориентации части, образованной указанными предполагаемыми дефектами и проходящей через указанный пиксель. В этом случае подобная часть с предполагаемым дефектом, проходящая через указанный пиксель, вероятно, представляет собой надрез, имеющий часть, которая пересекается с частью рисунка в указанной расширенной модели рисунка.
В первом варианте осуществления ориентация части, образованной указанными предполагаемыми дефектами и проходящей через указанный пиксель, представлена значением ориентации градиента в указанном пикселе, вычисленным, как описано выше, на основе значений светлоты в первом изображении, полученном при рассеянном свете.
Во втором варианте осуществления ориентация части, образованной указанными предполагаемыми дефектами и проходящей через указанный пиксель, представлена ориентацией основного собственного вектора гессиана в указанном пикселе, вычисленного, как описано выше, на основе значений светлоты в первом изображении, полученном при рассеянном свете.
Предпочтительно предусмотрено слияние (при логическом ИЛИ) первого и второго наборов пикселей для формирования конечного изображения (как правило, бинарного), характеризующего указанный участок поверхности, в котором пиксели, соответствующие указанным первому и второму наборам, отличаются от оставшихся пикселей, как иллюстративно показано на фиг.13, на которой видно, что были идентифицированы как часть с разрезом/надрезом на фоне рисунка, так и часть с разрезом/надрезом на расширенном рисунке.
Соответствующая морфологическая обработка предпочтительно может быть выполнена на указанных пикселях для отбрасывания ложных предполагаемых дефектов. Например, исключаются изолированные блоки пикселей или соединенные зоны пикселей («сгустки»), которые не совместимы с отыскиваемыми дефектами; в частности, выбор может быть сделан по площади и/или длине. Фиг.14 показывает конечный результат обработки данного типа, выполненной на изображении по фиг.13.
Фиг.15 показывает схему последовательности операций способа согласно варианту осуществления настоящего изобретения, в котором операция 1010 представляет операцию а) выполнения шины, имеющей поверхность, подлежащую анализу и имеющую рисунок со схемой, который повторяется по существу одинаковым образом в множестве мест.
Операция 1020 представляет операцию b) получения одного или более цифровых изображений участка поверхности, на которых рисунок включает в себя схему, повторяющуюся множества раз.
Операция 1030 представляет операцию с) идентификации множества первых зон указанных одного или более цифровых изображений, при этом каждая первая зона соответствует соответствующей подчасти схемы.
Операция 1040 представляет операцию d) идентификации соответствующего множества зон указанных одного или более цифровых изображений, гомологичных каждой первой зоне, при этом соответствующая подчасть схемы в каждой гомологичной зоне по существу идентична указанной соответствующей подчасти схемы в указанной каждой первой зоне.
Операция 1050 представляет операцию е) расчета для каждой первой зоны модели соответствующей подчасти схемы, при этом указанная модель подчасти схемы представляет собой цифровое изображение, в котором каждому пикселю соответствует среднее значение из значений, поставленных в соответствие пикселям указанной каждой первой зоны и соответствующих гомологичных зон, имеющим одинаковые относительные координаты указанного каждого пикселя, в результате чего получают множество расчетных моделей подчастей схемы.
Операция 1060 представляет операцию f) получения модели указанного рисунка на указанном участке поверхности посредством объединения указанных расчетных моделей подчастей схемы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ОБНАРУЖЕНИЯ ДЕФЕКТОВ НА ПОВЕРХНОСТИ ШИН | 2016 |
|
RU2657648C1 |
| Система обнаружения дефектов поверхности бронированного кабеля | 2023 |
|
RU2808438C1 |
| Способ обнаружения дефектов поверхности бронированного кабеля | 2023 |
|
RU2807987C1 |
| Система обнаружения дефектов поверхности бронированного кабеля (2) | 2023 |
|
RU2801809C1 |
| Способ и устройство для детектирования дефектов на шинах в процессе производства шин | 2015 |
|
RU2640673C1 |
| УСТРОЙСТВО И СПОСОБ АНАЛИЗА ШИН | 2016 |
|
RU2726725C2 |
| УСТРОЙСТВО И СПОСОБ КОНТРОЛЯ ШИН | 2017 |
|
RU2728848C2 |
| АВТОМАТИЗИРОВАННОЕ ОПРЕДЕЛЕНИЕ И ОБРЕЗКА НЕОДНОЗНАЧНОГО КОНТУРА ДОКУМЕНТА НА ИЗОБРАЖЕНИИ | 2017 |
|
RU2680765C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ПРИГОДНОСТИ ИЗОБРАЖЕНИЯ ДОКУМЕНТА ДЛЯ ОПТИЧЕСКОГО РАСПОЗНАВАНИЯ СИМВОЛОВ И ДРУГИХ ОПЕРАЦИЙ ПО ОБРАБОТКЕ ИЗОБРАЖЕНИЙ | 2016 |
|
RU2608239C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ЛОКАЛИЗАЦИИ ИСТОЧНИКА ДЕФЕКТА ТОНКОСЛОЙНОЙ СИСТЕМЫ, ОСАЖДЕННОЙ НА ПОДЛОЖКУ | 2017 |
|
RU2742201C2 |


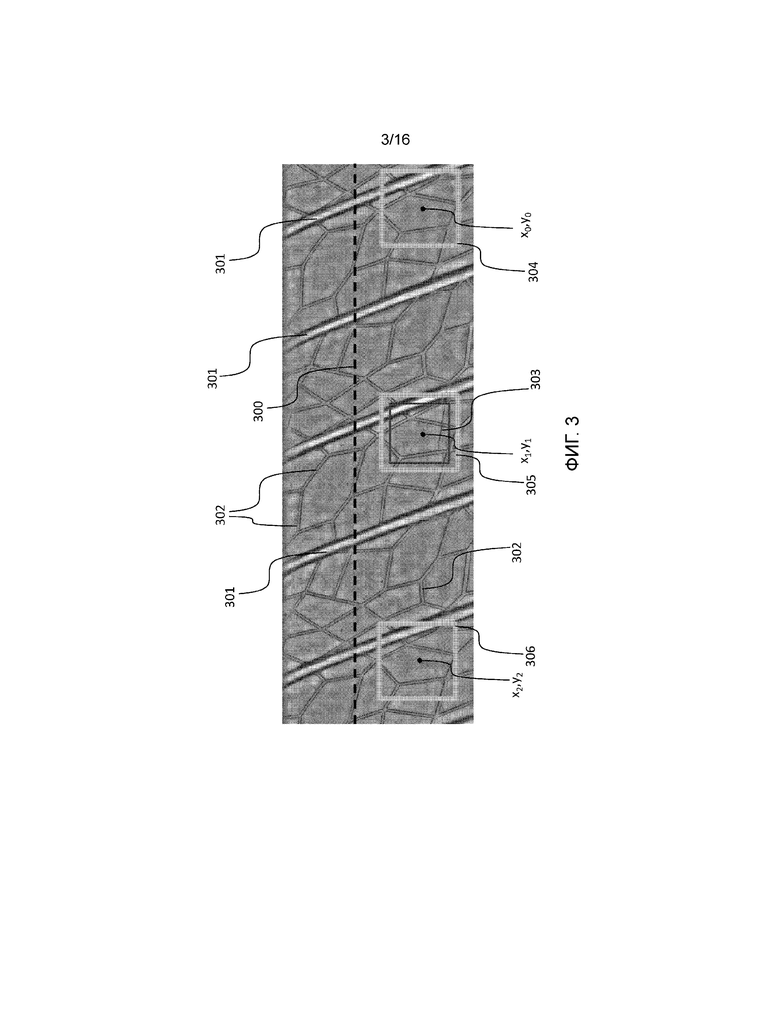
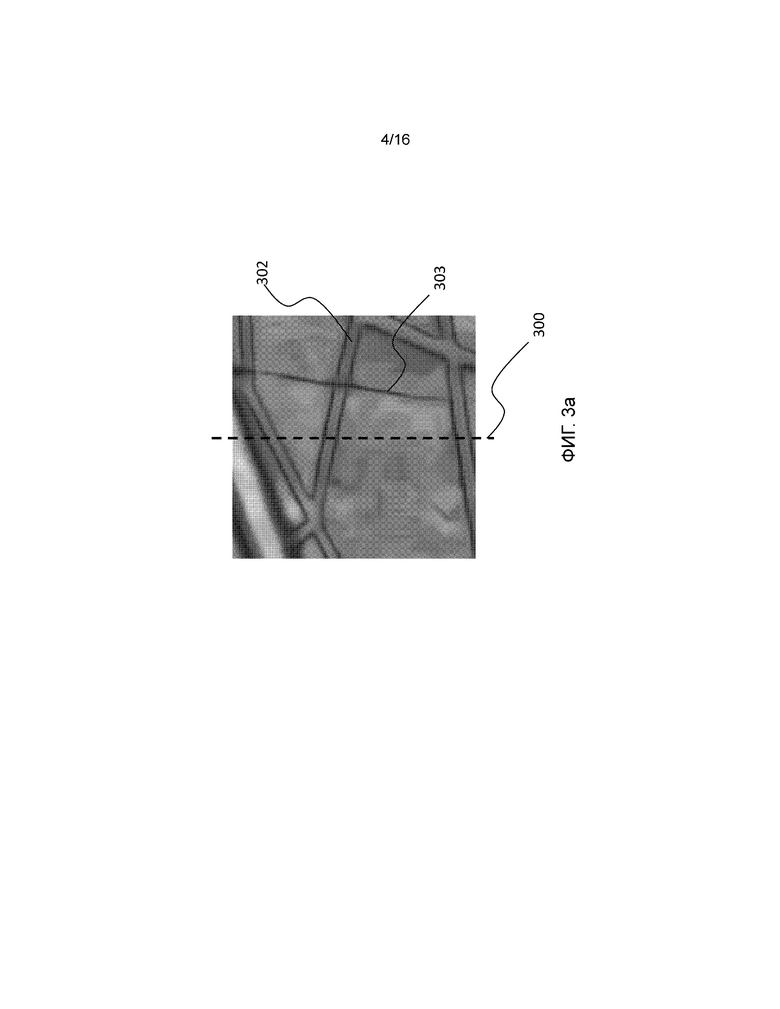
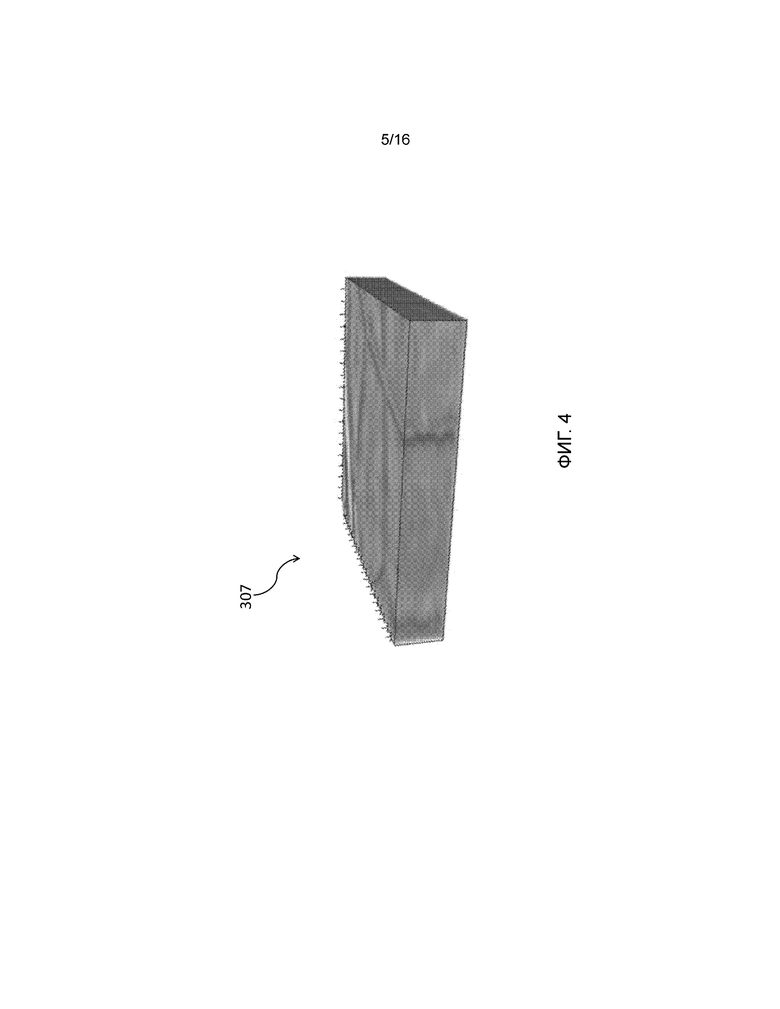

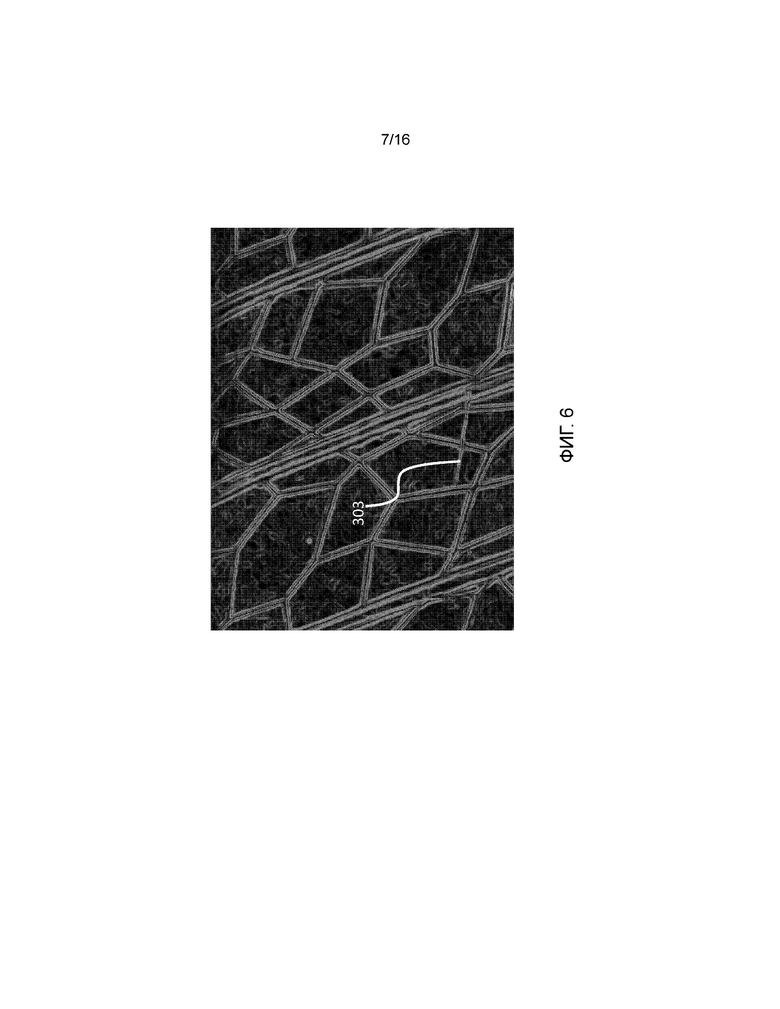
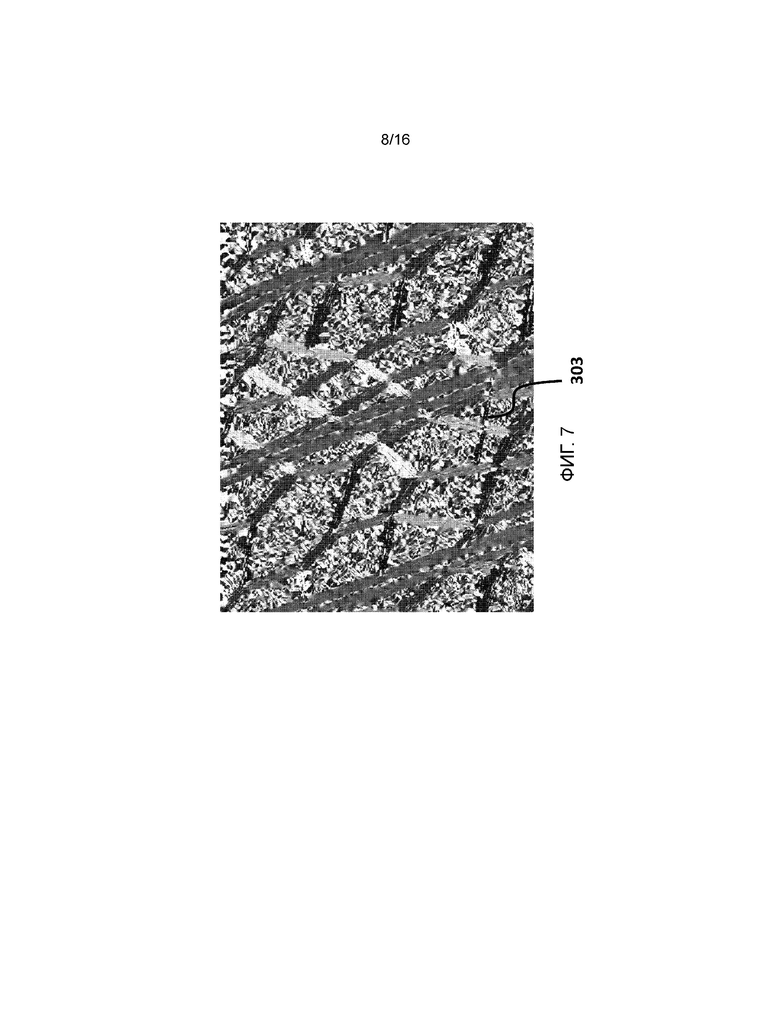

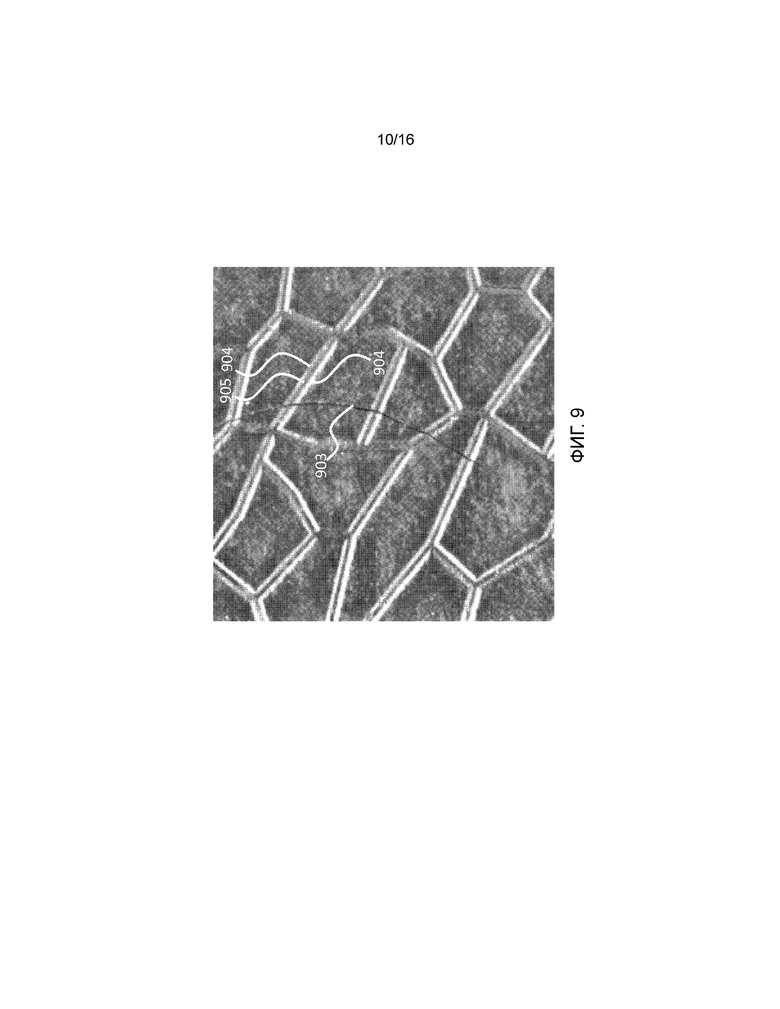
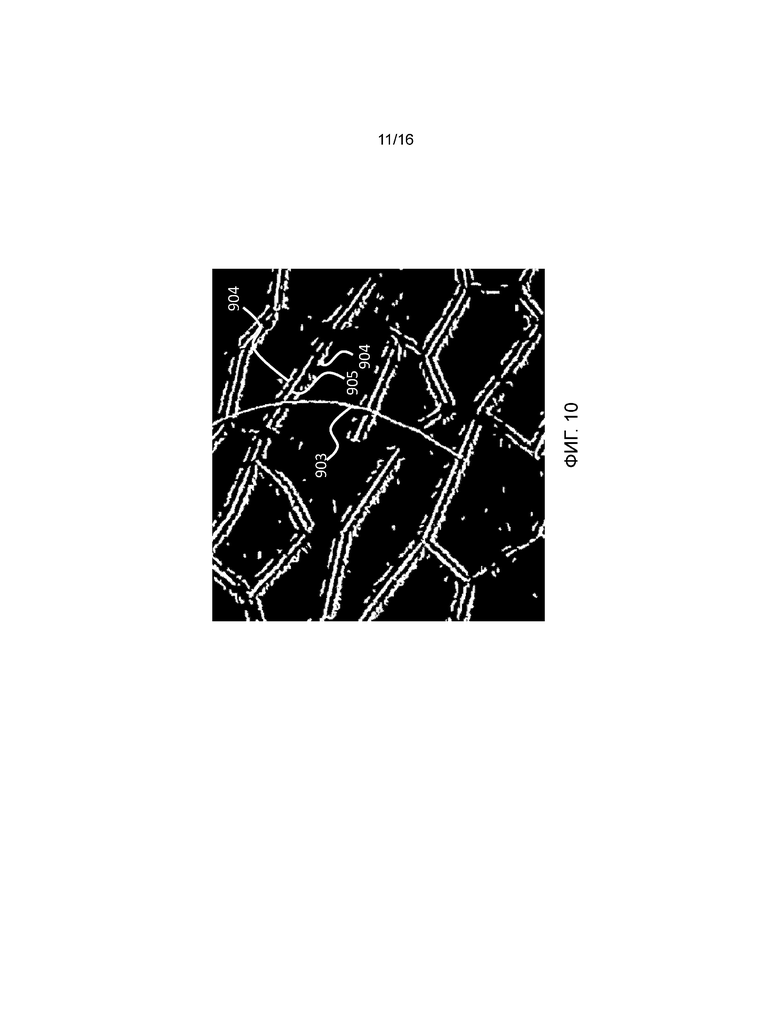





Изобретение относится к вычислительной технике. Технический результат заключается в обеспечении возможности анализа поверхности шины. Такой результат достигается тем, что получают один или более цифровых изображений участка поверхности, имеющего рисунок, который содержит схему, которая повторяется по существу одинаковым образом множество раз, идентифицируют множество первых зон указанных одного или более цифровых изображений, каждая из которых соответствует соответствующей подчасти схемы, идентифицируют соответствующее множество зон, гомологичных каждой первой зоне, при этом соответствующая подчасть схемы по существу идентична соответствующей подчасти схемы в каждой первой зоне, рассчитывают модель соответствующей подчасти схемы, в которой каждому пикселю соответствует среднее значение из значений, поставленных в соответствие пикселям каждой первой зоны и соответствующих гомологичных зон, имеющим одинаковые относительные координаты указанного каждого пикселя, получают модель рисунка посредством использования расчетных моделей подчастей схемы. 2 н. и 25 з.п. ф-лы, 16 ил.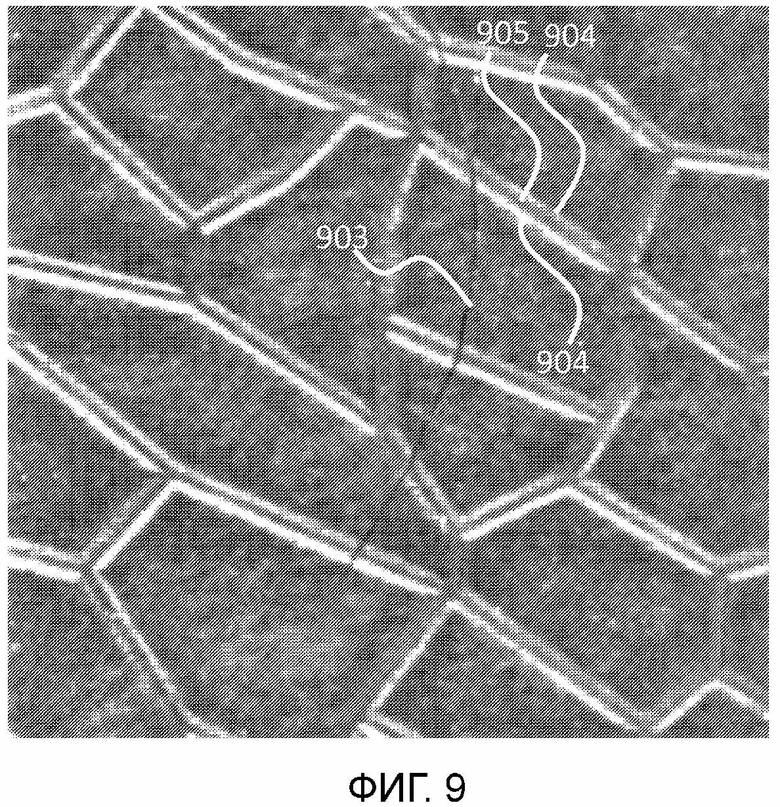
1. Способ анализа поверхности шины, включающий:
а) обеспечение шины (200), имеющей поверхность, подлежащую анализу, причем указанная поверхность имеет рисунок, включающий в себя схему, которая повторяется в множестве мест по существу одинаковым образом;
b) получение одного или более цифровых изображений участка поверхности, при этом указанный участок поверхности выбирают так, чтобы указанный рисунок на участке поверхности содержал указанную схему, повторяющуюся множество раз;
с) идентификацию множества первых зон (304) указанных одного или более цифровых изображений, причем каждая первая зона соответствует соответствующей подчасти схемы, при этом каждая первая зона содержит множество пикселей, характеризующихся соответствующими относительными координатами в первой зоне;
d) идентификацию соответствующего множества зон (305, 306) указанных одного или более цифровых изображений, гомологичных каждой первой зоне, причем каждая гомологичная зона содержит множество пикселей, характеризующихся соответствующими относительными координатами в гомологичной зоне, при этом соответствующая подчасть схемы в каждой гомологичной зоне по существу идентична указанной соответствующей подчасти схемы каждой первой зоны;
е) для каждой первой зоны расчет модели (308) соответствующей подчасти схемы, причем модель подчасти схемы представляет собой цифровое изображение, в котором каждому пикселю соответствует среднее значение из значений, поставленных в соответствие пикселям каждой первой зоны и соответствующих гомологичных зон, имеющим одинаковые относительные координаты каждого пикселя, в результате чего получают множество расчетных моделей подчастей схемы;
f) получение модели указанного рисунка на участке поверхности посредством объединения расчетных моделей подчастей схемы.
2. Способ по п.1, при котором множество первых зон образует соединенную часть указанных одного или более цифровых изображений, содержащую, по меньшей мере, указанную схему.
3. Способ по п.1 или 2, при котором указанные первые зоны частично перекрываются друг с другом в аксиальном направлении и/или в направлении вдоль окружности шины.
4. Способ по любому из пп.1-3, при котором идентификация соответствующего множества гомологичных зон включает вычисление функции корреляции между соответствующей первой зоной и, по меньшей мере, одним участком оставшейся части указанных одного или более цифровых изображений.
5. Способ по п.4, при котором идентификация соответствующего множества гомологичных зон включает идентификацию одного, по меньшей мере, локального экстремума функции корреляции.
6. Способ по любому из пп.1-5, при котором указанный участок поверхности выбирают так, чтобы на указанных одном или более цифровых изображениях схема повторялась по существу одинаковым образом, по меньшей мере, восемь раз в множестве мест, распределенных вдоль направления по окружности шины, и соответствующее множество гомологичных зон распределено вдоль направления по окружности, при этом схема повторяется по существу одинаковым образом вдоль направления периодичности с по существу постоянным периодом, причем перед идентификацией соответствующего множества гомологичных зон предусмотрено получение значения, характеризующего указанный период, посредством поиска максимума функции корреляции между одним участком указанных одного или более цифровых изображений и множеством дополнительных участков указанных одного или более цифровых изображений, имеющих размер, равный размеру указанного участка одного или более цифровых изображений, и распределенных вдоль направления периодичности.
7. Способ по п.6, при котором идентификация соответствующего множества гомологичных зон включает идентификацию соответствующей первой гомологичной зоны посредством вычисления функции корреляции между каждой первой зоной и множеством зон, имеющих размер, равный каждой первой зоне, и расположенных вокруг точки одного или более цифровых изображений, расположенной вдоль направления периодичности на расстоянии от каждой первой зоны, равном целому кратному указанного периода.
8. Способ по любому из пп.1-7, при котором идентификация соответствующего множества гомологичных зон включает идентификацию последовательности соответствующих гомологичных зон последовательно, при этом каждую соответствующую гомологичную зону из последовательности идентифицируют, используя соответствующую предшествующую гомологичную зону в последовательности.
9. Способ по любому из пп.1-8, при котором при расчете модели соответствующей подчасти схемы среднее значение содержит среднее арифметическое и/или геометрическое и/или квадратичное и/или моду и/или их комбинации или состоит из среднего арифметического и/или геометрического и/или квадратичного и/или моды и/или их комбинаций для указанных значений.
10. Способ по любому из пп.1-8, при котором при расчете модели соответствующей подчасти схемы среднее значение содержит медианное значение или состоит из медианного значения из указанных значений.
11. Способ по любому из пп.1-10, при котором получение одного или более цифровых изображений включает: освещение участка поверхности рассеянным светом и получение первого изображения, в котором каждому пикселю соответствует значение светлоты, характеризующее отражательную способность и/или рассеивающую способность и/или цвет точки поверхности, соответствующей каждому пикселю; освещение участка поверхности светом, падающим под скользящим углом и поступающим соответственно с противоположных направлений, и соответствующее получение второго и третьего изображений, в которых каждому пикселю соответствует значение светлоты, характеризующее отражательную способность и/или рассеивающую способность и/или цвет точки поверхности, соответствующей каждому пикселю; вычисление разностного изображения, в котором каждому пикселю соответствует значение, характеризующее разность соответствующих значений светлоты указанных второго и третьего изображений.
12. Способ по п.11, при котором операцию получения значения, характеризующего указанный период, и/или идентификации множества первых зон и соответствующего множества гомологичных зон выполняют, по меньшей мере, на разностном изображении посредством обработки разностного изображения.
13. Способ по п.11 или 12, при котором указанные операции получения значения, характеризующего период, и/или идентификации множества первых зон и соответствующего множества гомологичных зон выполняют на первом изображении.
14. Способ по любому из пп.11-13, при котором идентификация каждой из первых зон и соответствующего множества гомологичных зон включает идентификацию - посредством обработки разностного изображения - соответствующего положения каждой первой зоны и соответствующих гомологичных зон на разностном изображении и последующую идентификацию - на первом изображении - соответствующей первой зоны и соответственного соответствующего множества гомологичных зон, имеющих соответствующие положения.
15. Способ по любому из пп.11-14, при котором операцию расчета модели соответствующей подчасти схемы выполняют на первом изображении.
16. Способ по любому из пп.1-15, при котором для каждого пикселя, по меньшей мере, одного изображения из указанных одного или более цифровых изображений предусмотрено вычисление градиента значений, поставленных в соответствие пикселям, вдоль двух координат изображения, при этом градиент представляет собой вектор с двумя составляющими, характеризующими изменение значений соответственно вдоль двух координат, причем каждому пикселю соответствуют значение модуля градиента и значение ориентации градиента.
17. Способ по п.16, при котором одну или более из операций идентификации множества первых зон, идентификации соответствующего множества гомологичных зон, расчета модели соответствующей подчасти схемы и расчета модели рисунка выполняют на основе значений модулей градиентов и/или значений ориентации градиентов.
18. Способ по п.16, при котором для каждого пикселя модели рисунка, рассчитанной на основе первого изображения, предусмотрено вычисление значения модуля градиента и значения ориентации градиента для значений светлоты.
19. Способ по любому из пп.1-18, при котором модель рисунка получают заменой - на, по меньшей мере, одном изображении из одного или более изображений, предпочтительно на первом изображении - каждой первой зоны и соответствующих гомологичных зон моделью соответствующей подчасти схемы.
20. Способ по любому из пп.1-19, включающий сравнение указанных одного или более цифровых изображений, предпочтительно первого изображения, с моделью рисунка и обнаружение возможных дефектов на указанных одном или более цифровых изображениях на основе такого сравнения.
21. Способ по любому из пп.1-20, включающий расчет расширенной модели рисунка посредством операции расширения, выполняемой на модели рисунка, полученной и базирующейся на значениях модулей градиентов для модели рисунка в значениях светлоты.
22. Способ по п.21, при котором расширение включает присвоение каждому пикселю расширенной модели рисунка максимального значения модуля градиента, вычисленного в заданной зоне вокруг соответствующего пикселя в модели рисунка.
23. Способ по п.21 или 22, при котором модель рисунка подвергают обработке до или после расширения на основе значения модуля градиента так, чтобы получить бинарную модель рисунка, предпочтительно расширенную, в которой каждому пикселю поставлен в соответствие первый индекс, предпочтительно двоичное значение которого характеризует то, принадлежит ли пиксель рисунку или нет.
24. Способ по любому из пп.1-23, при котором указанный участок поверхности представляет собой проходящий вдоль окружности участок внутренней поверхности, соответствующий углу в центре, который больше или равен 60°, и имеющий ширину в плоскости, проходящей через указанную ось, которая больше или равна 50 мм и/или меньше или равна 200 мм, причем способ повторяют посредством изменения каждый раз проходящего вдоль окружности участка внутренней поверхности так, чтобы совокупность участков поверхности образовывала, по меньшей мере, одну полную половинную часть внутренней поверхности шины, которая проходит от экваториальной плоскости до борта шины.
25. Устройство (1) для анализа шин на линии по производству шин, содержащее:
опору (102) для шины (200), выполненную с возможностью вращения вокруг оси, перпендикулярной ей;
по меньшей мере, один источник (104), выполненный с возможностью испускания, по меньшей мере, одного светового излучения для освещения участка (221) поверхности шины, когда она установлена на опоре, и расположенную на расстоянии от источника систему (105) обнаружения, выполненную с возможностью определения интенсивности оптического светового излучения, отраженного и/или рассеянного указанным участком поверхности; и
блок (140) обработки данных, выполненный с возможностью осуществления способа по любому из пп.1-24.
26. Устройство по п.25, в котором система обнаружения содержит линейную камеру, имеющую линию (106) объектива, лежащую в оптической плоскости (107), проходящей через линейную камеру, при этом указанный, по меньшей мере, один источник содержит первый источник (108) света, второй источник (109) света и третий источник (110) света, выполненные с возможностью испускания соответственно первого, второго и третьего световых излучений для освещения линейного участка (221) поверхности, совпадающего с линией объектива или находящегося вблизи нее, причем первый источник света и второй источник света расположены соответственно с противоположных сторон относительно оптической плоскости, при этом каждый из первого и второго источников света выполнен с возможностью освещения линии объектива соответствующим светом, падающим под скользящим углом, и третий источник света выполнен с возможностью освещения линии объектива рассеянным светом, причем устройство содержит блок привода и управления, выполненный с возможностью:
включения первого источника света, второго источника света и третьего источника света в чередующейся последовательности; и
приведения в действие линейной камеры для получения соответственно первого, второго и третьего изображений синхронно с включением соответственно первого источника света, второго источника света и третьего источника света.
27. Устройство по п.25 или 26, в котором система обнаружения содержит зеркало (150), имеющее отражающую поверхность, расположенную рядом с третьим источником света перпендикулярно оптической плоскости и пересекающую последнюю так, чтобы отражать линию объектива в оптической плоскости под углом, который больше или равен 30° или меньше или равен 135°.
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Устройство для обработки сферических оптических деталей | 1988 |
|
SU1742041A2 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ АВТОМОБИЛЬНОЙ ШИНЫ | 2013 |
|
RU2529562C1 |

