ОБЛАСТЬ ТЕХНИКИ
Заявленное решение относится к измерительной технике, в частности к устройству и способу определения времени прихода импульса путем измерения параметров звуковых и прочих волн, и может быть использовано в области эхо-локации, УЗ позиционирования, в задачах изменения скоростей потока жидкостей или газов (УЗ расходомеров), УЗ дефектоскопии. По аналогии с УЗ, данный способ может применяться для определения времени прихода импульса ЭМ или прочей волны с наименьшей дисперсией, например, в задачах точного измерения времени между приемами (и/или посылками) порций сигнала (пучков импульсов или волн) или в задачах беспроводной синхронизации, тактирования, стробирования на дальних расстояниях и ЭМ позиционирования.
УРОВЕНЬ ТЕХНИКИ
Из уровня техники известно множество решений, направленных на определения времени прихода импульса. Наиболее близким аналогом к заявленном решению являются устройство компенсации погрешности измерения ультразвукового уровнемера, описанное в патенте RU 2470267 C1, опубл. 20.12.2012, выполненное с возможностью измерения временного интервала между излученным и принятым сигналами. Недостатками известного устройства является сложность конструкции, а также низкая точность измерения времени прихода сигнала и низкая помехозащищенность.
раскрытие изобретения
Технической задачей, на решение которой направленно заявленное решение, является создание устройства и способа, обеспечивающих более высокую точность определения времени прихода импульса и с наименьшей дисперсией, а также обеспечивающих более высокую повторяемость и помехоустойчивость к отраженным волнам за счет быстрого получения опорной точки на первом фронте огибающей импульсов не зависимо от фазы принятого сигнала до заметного влияния отраженных волн.
Техническим результатом является повышение точности, повторяемости и скорости определения времени принимаемого сигнала не зависимо от его фазы, а также снижение требований к вычислительным ресурсам.
Для достижения указанного технического результат разработан способ определения времени прихода сигнала, содержащий этапы, на которых: генерируют с помощью излучателя сигнал с заданным конечным количеством периодов волн (несколько импульсов); принимают с помощью приемника сгенерированный сигнал, оцифровывают и определяют огибающую амплитуды (амплитудную модулирующую функцию) сигнала в каждой точке семплирования (дискретизации); определяют анализируемый сигнал на основе огибающей амплитуды принятого сигнала, причем анализируемый сигнал пропорционален мощности принимаемого сигнала; на основе анализруемого сигнала определяют время прихода сигнала.
Также разработано устройство определения времени прихода импульсов, содержащее: устройство обработки данных, включающее полосовой фильтр, синусный, косинусный фильтры, умножители (для возведения в квадрат сигналов с выходов синусного и косинусного фильров) и сумматор; приемник; АЦП; генератор тактового сигнала. Выход приемника соединен через АЦП с полосовым фильтром, к выходу которого параллельно подключены синусный и косинусный фильтры, выходы синусного и косинусного фильтров соединены с сумматором через умножители (для возведения в квадрат), при этом устройсво обработки данных выполнено с возможностью: определять огибающую амплитуды сигнала в каждой точке семплирования; определять анализируемый сигнал на основе огибающей амплитуды принятого сигнала, причем анализируемый сигнал пропорционален мощности принимаемого сигнала; и на основе анализруемого сигнала определять время прихода импульсов.
краткое описание чертежей
Для лучшего представления и понимания сущности изобретения далее будет сделана ссылка, лишь в качестве примера, на прилагаемые чертежи, на которых изображены:
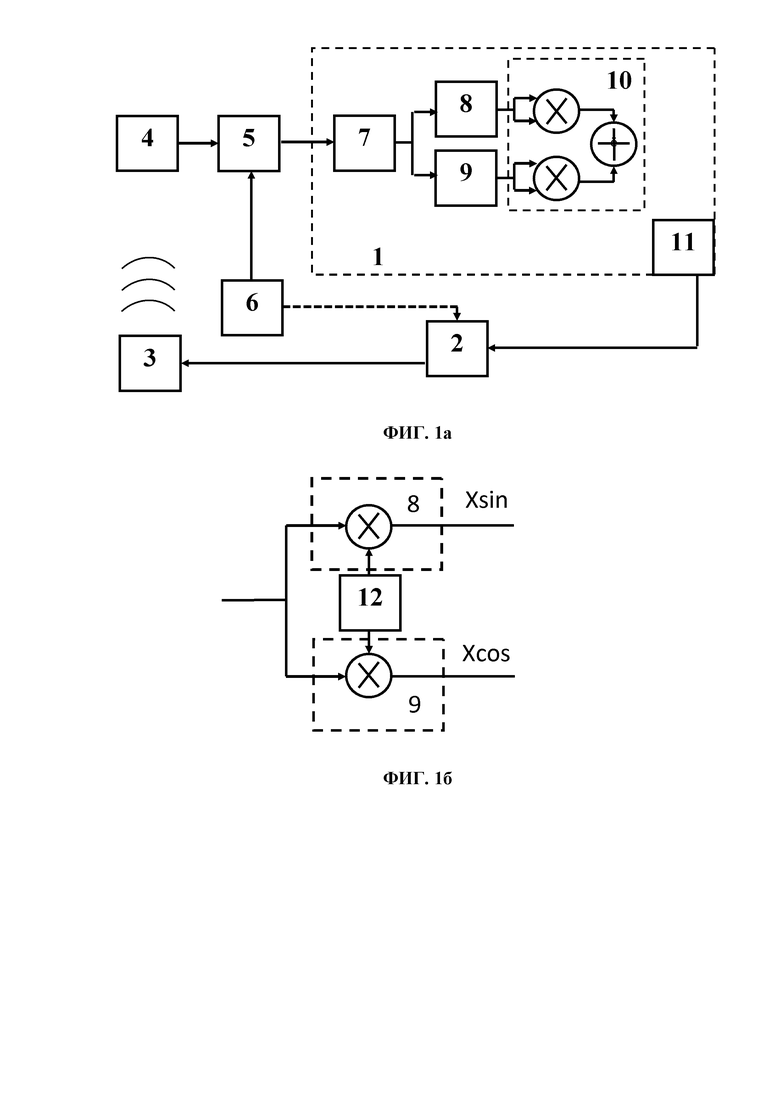
фиг. 1а, 1б - схема устройства определения времени принимаемого сигнала или времени между посылкой и приемом сигналов;
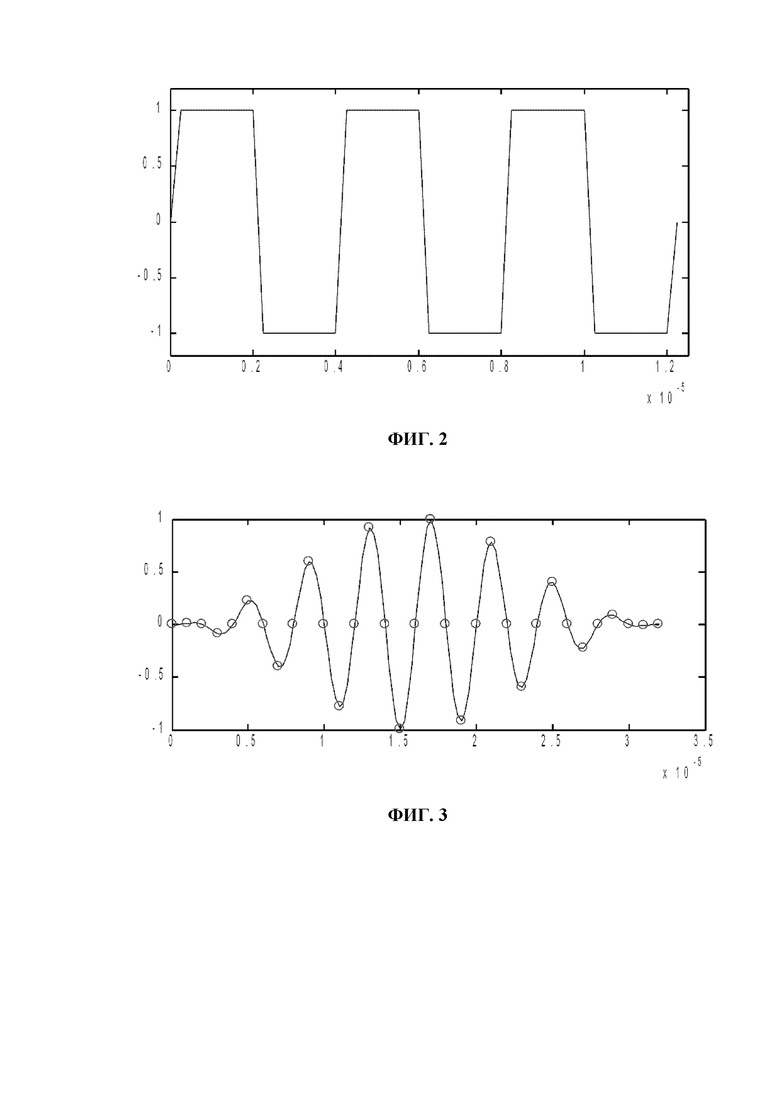
фиг. 2 - форма сигнала напряжения, подаваемая на излучатель (преобразователь);
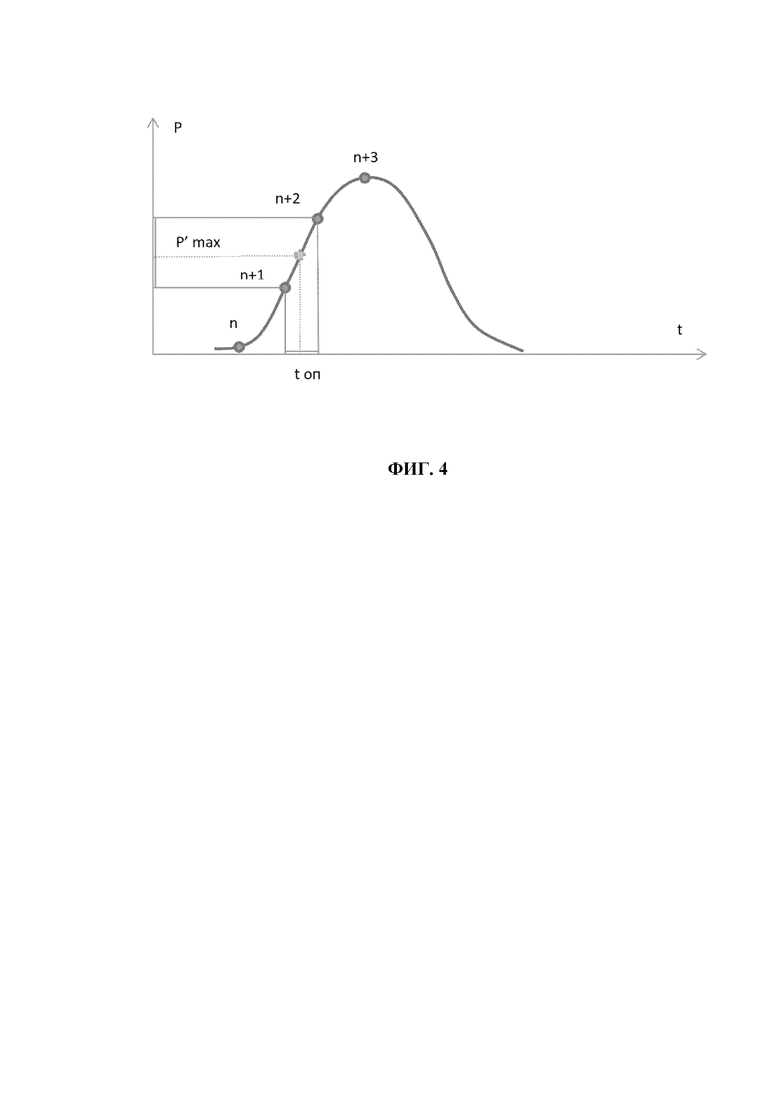
фиг. 3 - форма принимаемого приемником сигнала;
фиг. 4 - форма анализируемого сигнала.
Осуществление изобретения
Пример реализации заявленного решения далее подробно будет описан со ссылкой на фиг. 1а, на котором представлена упрощенная техническая схема устройства определения времени принимаемого сигнала, реализующего способ определения времени прихода сигнала, а также способ определения времеми между посылкой и приемом сигнала.
В соответствии с приведенным на фиг. 1а примером устройство определения времени прихода импульсов содержит приемную часть: устройство обработки данных 1, включающее полосовой фильтр 7, синусный 8 и косинусный 9 фильтры, умножители и сумматор 10; приемник 4; АЦП 5; генератор тактового сигнала 6; выход приемника 4 соединен через АЦП 5 с полосовым фильтром 7, к выходу которого параллельно подключены синусный 8 и косинусный 9 фильтры, выходы синусного 8 и косинусного 9 фильтров подключенны к сумматору 10 через умножители для возведения в квадрат, при этом устройсво обработки данных выполнено с возможностью: определять огибающую амплитуды сигнала; определять анализируемый сигнал на основе квадрата огибающей амплитуды принятого сигнала (представлен на выходе сумматора 10), причем анализируемый сигнал пропорционален мощности принимаемого сигнала; и на основе анализруемого сигнала определять время прихода сигнала и между приходами порций сигнала.
Для определения времени между посылкой и приходом (приемом) сигнала в частности для УЗ волны и других волн в случаях, когда измеряемый интервал времени больше интервала между отсчетами АЦП, устройство может содержать передающую часть: генератор напряжения 2, излучатель сигнала 3, причем выход устройства обработки данных 1 приемной части в таком случае соединен со входом генератора напряжения 2 передающей части, выход которого соединен с излучателем 3 сигнала, благодаря этой связи приемной и передающей части устройсво обработки данных дополнительно наделено возможностью определять или задавать начало передачи и определять время между посылкой и приходом сигнала с помощью таймера 11, которым наделено устройство обработки данных 1 или установленного между устройством обработки данных 1 и генератором напряжения 2. Генератор тактового сигнала 6, тактирующий АЦП 5 приемной части, может быть соединен с генератором напряжения 2 передающей части для более точного синхронного приема. Устройство обработки данных 1 реализовано на базе по меньшей мере одного процессора или микроконтроллера и в соответствии с заложенным в него программным алгоритмом или по команде, поступившей на вход устройства обработки данных 1, направляет сигналы управления на генератор напряжения 2, который в соответствии с полученными сигналами подает напряжение на излучатель сигнала 3 для генерирования сигнала с заданным количеством периодов волн. Пример формы сигнала напряжения, подаваемого на излучатель, приведен на фиг. 2. В данном случае предлагаемая характерная модель формы сигнала для простоты понимания данного способа изображена такой, чтобы ее огибающая была близка к форме синуса.
В качестве излучателя сигнала 3 могут быть использованы различные виды излучателей, например, ультразвуковые (УЗ) излучатели, электромагнитные (ЭМ) излучатели и т.д., соответственно в зависимости от используемого излучателя генерируемый им сигнал будет представлять пучок, состоящий из по меньшей мере одной УЗ, ЭМ или прочей волны.
Сгенерированный излучателем 3 сигнал поступает на приемник 4 и оцифровывается посредством АЦП 5. Оцифровываться принимаемый приемником 4 сигнал может синхронно с излучаемым сигналом с частотой, обеспечивающей восстановление сигнала с заданной (определенной) частотой несущей, например, равной четырехкратной частоте несущей. При таком условии коэффициенты синусного и косинусного фильтра принимают целые значения из ряда [-1, 0, 1] и значительно упрощаются операции вычисления, однако условия оцифровки могут быть выбраны другими. Пример формы принимаемого приемником сигнала для простоты понимания способа представлен на фиг. 3. Синхронность в работе генератора напряжения 2 и АЦП 5 обеспечивается посредством генератора тактового сигнала 6. Далее оцифрованный сигнал поступает на полосовой фильтр 7, который обеспечивает фильтрацию сигнала для увеличения соотношения сигнал/шум, после чего посредством устройства обработки данных 1 определяется анализируемый сигнал как пропорциональный мощности принимаемого сигнала в реальном времени и на основе анализруемого сигнала определяется время прихода сигнала.
Таким образом, за счет того, что время прихода сигнала определяется на основе анализируемого сигнала, пропорционального мощности принимаемого сигнала, в заявленном решении не используется пиковый детектор, в отличие от решения, описанном в патенте RU 2470267 C1. Следовательно, исключаются помехи и наводки на принимаемый сигнал, возникающие вследствие работы пикового детектора, а также повышается быстродействие устройства. На основе данных анализируемого сигнала (пропорционального мощности) можно любым способом выбрать и определить характерную точку. Наиболее точный результат получается, если в качестве характерной точки выбрана точка перегиба на первом фронте анализируемого сигнала. Далее будет описан пример вычисления анализируемого сигнала посредством устройства обработки данных 1 с соответствующим программным обеспечением.
Для вычисления анализируемого сигнала, пропорционального мощности принимаемого сигнала, выделяется пара квадратурных составляющих сигнала со сдвигом фаз на 90 град. Для этого последовательность отсчетов АЦП принятого сигнала (оцифрованный принятый сигнал) после фильтрации полосовым фильтром пропускают через синусный 8 и косинусный 9 КИХ фильтры (с конечной импульсной характеристкой), например, с коэффициентами Fsin = [0 1 0 -1], Fcos = [1 0 -1 0] для условия частоты дискретизации (семплирования) оцифрованного принятого сигнала, равной четырехкратной частоте несущей. Данные фильтры выполняют функцию квадратурного преообразователя и выделяют кваратурную (синусную) Xsin и синфазную (косинусную) Xcos составляющие сигнала. Эквивалентная схема квадратурного преобразователя посредством фильтров 8 и 9 показана на фиг. 1б. В общем случае коэффициенты синусного 8 и косинусного 9 фильтров представлют собой последовательноти, описывающие один или несколько полных периодов синуса и косинуса соответственно, и определяют (задают) частоту программного косинусно-синусного опорного генератора 12 (фиг. 1б), причем опорная частота этого генератора равна частоте несущей принимаемого сигнала. Процесс фильтрации синусным 8 и косинусным 9 КИХ фильтрами - это умножение принимаемого сигнала заданной частоты на сигналы с косинусно-синусного опорного генератора такой же частоты.
Полученные сигналы Xsin(n) и Xcos(n) образуют идеально сопряженые по Гильберту последовательности (со сдвигом фаз ровно 90 градусов), что позволяет точно вычислить огибающую амплитуды принятого сигнала в любой точке независимо от фазы принятого сигнала. Фильтрованные сигналы Xsin(n) и Xcos(n) поступают на устройство обработки данных 1, которое с помощью умножителей и сумматора определяет исследуемый (анализируемый) сигнал по формуле:
P(n) = V(n)^2 = Xsin(n)^2 + Xcos(n)^2,
где V(n) - огибающая сигнала, P(n) = V(n)^2 - исследуемый (анализируемый) сигнал, Xsin(n) - фильтрованный сигнал фильтром Fsin, Xcos(n) - фильтрованный сигнал фильтром Fcos.
Опорную координату устройство обработки данных 1 выделяет на участке с максимальной крутизной фронта исследуемого сигнала в точке перегиба (экстемума производной). Точка перегиба приходит раньше, чем локальный экстремум, поэтому посторонние отраженные волны меньше влияют на форму кривой. Также в точке перегиба производная максимальна, поэтому точность ее вычисления существенно выше, чем экстремума, где производная равна нулю. Физически мощность волны пропорциональна квадрату ее амплитуды, поэтому анализируемый сигнал в физическом смысле пропорционален мощности принятого сигнала. Такой способ дает минимальную погрешность выделения опорной координаты времени. Благодаря крутому фронту исследуемого сигнала (квадрата огибающей амплитуды сигнала), любая погрешность в оси координат приводит к значительно меньшей погрешности во временной оси.
На фиг. 4 представлен пример формы анализируемого сигнала для определения точки максимальной крутизны фронта исследуемого сигнала, где n - моменты дискретизации, tоп - вычисленная опорная координата времени, P' max - значение исследуемого сигнала (мощности) в точке максимальной производной, вычисленной при интерполяции, t - ось времени, P - ось мощности сигнала.
Далее для определения точки перегиба (максимальной производной) на каждом дискретном участке исследуемого (анализируемого) сигнала строится кубическая интерполяция по четырем точкам n, n+1, n+2, n+3. Выбор кубической интерполяции обоснован простотой расчетов точки фронта огибающей пришедшей волны. Точки перегиба tоп (максимальной производной) фронта исследуемого сигнала считаем опорной координатой, принимаемого сигнала.
Данный способ определения опорной координаты сигнала обладает относительно высокой повторяемостью, а также низким требованиям к вычислительным ресурсам и позволяет получить точность определения времени прихода импульса значительно больше интервала между моментами дискретизации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ЗАДЕРЖКИ РАДИОИМПУЛЬСА ОТНОСИТЕЛЬНО МЕСТНОГО ОПОРНОГО СИГНАЛА | 1991 |
|
RU2012026C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА ПОВОРОТА РОТОРА ДАТЧИКА УГЛА ТИПА СИНУСНО-КОСИНУСНОГО ВРАЩАЮЩЕГОСЯ ТРАНСФОРМАТОРА | 2015 |
|
RU2598309C1 |
| РАДИОЛОКАТОР С НЕПРЕРЫВНЫМ ШУМОВЫМ СИГНАЛОМ И СПОСОБ РАСШИРЕНИЯ ДИАПАЗОНА ИЗМЕРЯЕМЫХ ДАЛЬНОСТЕЙ В РАДИОЛОКАТОРЕ С НЕПРЕРЫВНЫМ СИГНАЛОМ | 2015 |
|
RU2589036C1 |
| СПОСОБ И УСТРОЙСТВО СЕЛЕКЦИИ СИГНАЛОВ НАДВОДНОЙ ЦЕЛИ В МОНОИМПУЛЬСНОЙ РЛС | 2004 |
|
RU2278397C2 |
| Способ определения наличия в сигнале гармоник, длительность которых превышает установленное значение | 2023 |
|
RU2821216C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ И УСТРОЙСТВО РАДИОВЫСОТОМЕРА С НЕПРЕРЫВНЫМ ЛЧМ СИГНАЛОМ, ИСПОЛЬЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2550082C1 |
| Способ определения скорости объекта в доплеровской радиолокации | 2016 |
|
RU2709626C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЧАСТОТЫ УЗКОПОЛОСНОГО СИГНАЛА | 2009 |
|
RU2442178C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВРЕМЕНИ ПРИХОДА СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2483318C2 |
| РАСХОДОМЕР С УЛУЧШЕННЫМ ВРЕМЕНЕМ ПРОХОЖДЕНИЯ СИГНАЛА | 2015 |
|
RU2657343C2 |
Использование: для определения времени прихода сигнала. Сущность изобретения заключается в том, что генерируют с помощью излучателя сигнал с заданным конечным количеством периодов волн; принимают с помощью приемника сгенерированный сигнал, оцифровывают и определяют огибающую амплитуды сигнала в каждой точке семплирования (дискретизации) независимо от фазы принимаемого сигнала; определяют анализируемый сигнал на основе огибающей амплитуды принятого сигнала, причем анализируемый сигнал пропорционален мощности принимаемого сигнала; на основе анализруемого сигнала определяют время прихода сигнала. Технический результат: повышение точности, повторяемости и скорости определения времени принимаемого сигнала независимо от его фазы, а также снижение требований к вычислительным ресурсам. 2 н. и 18 з.п. ф-лы, 5 ил. 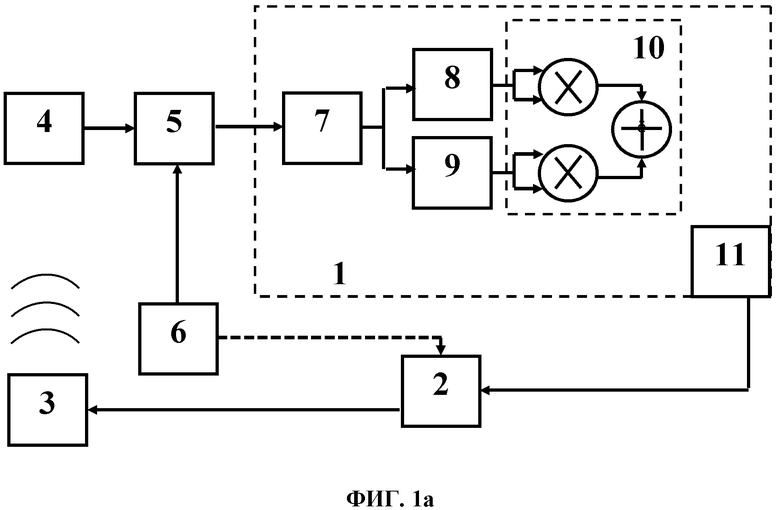
1. Способ определения времени прихода сигнала, содержащий этапы, на которых:
генерируют с помощью излучателя сигнал с заданным конечным количеством периодов волн;
принимают с помощью приемника сгенерированный сигнал, оцифровывают и определяют огибающую амплитуды сигнала в каждой точке семплирования (дискретизации) независимо от фазы принимаемого сигнала;
определяют анализируемый сигнал на основе огибающей амплитуды принятого сигнала, причем анализируемый сигнал пропорционален мощности принимаемого сигнала;
на основе анализируемого сигнала определяют время прихода сигнала.
2. Способ по п. 1, отличающийся тем, что сигнал представляет собой пучок, состоящий из по меньшей мере одной ультразвуковой или электромагнитной волны.
3. Способ по п. 1, отличающийся тем, что принимаемый с помощью приемника сигнал оцифровывается с частотой, обеспечивающей восстановление сигнала с заданной частотой несущей.
4. Способ по п. 3, отличающийся тем, что принимаемый с помощью приемника сигнал оцифровывается синхронно с излучаемым сигналом.
5. Способ по любому из пп. 3 или 4, отличающийся тем, что сигнал оцифровывается с частотой, равной четырёхкратной частоте несущей.
6. Способ по п. 1, отличающийся тем, что этап определения анализируемого сигнала на основе огибающей амплитуды принятого сигнала включает этапы, на которых:
определяют последовательность отсчетов принятого сигнала;
пропускают указанную последовательность отсчетов через синусный и косинусный фильтры для получения квадратурных составляющих сигнала;
определяют огибающую амплитуды принятого сигнала на основе значений квадратурных составляющих сигнала.
7. Способ по п. 6, отличающийся тем, что коэффициенты синусного и косинусного фильтров представляют собой последовательности, описывающие по меньшей мере один полный период синуса и косинуса соответственно, и определяют частоту программного косинусно-синусного опорного генератора, причем опорная частота опорного генератора равна частоте несущей принимаемого сигнала.
8. Способ по п. 6, отличающийся тем, что указанная последовательность отсчетов через синусный и косинусный фильтры пропускаются с коэффициентами Fsin = [0 1 0 -1], Fcos = [1 0 -1 0], при условии, что частота дискретизации равна четырёхкратной частоте несущей согласно пп.5 и 7.
9. Способ по п. 6, отличающийся тем, что исследуемый сигнал определяется по формуле:
P(n) = V(n)^2 = Xsin(n)^2 + Xcos(n)^2, где V(n) – огибающая сигнала, P(n) = V(n)^2 - исследуемый (анализируемый) сигнал, Xsin(n) – фильтрованный сигнал фильтром Fsin, Xcos(n) – фильтрованный сигнал фильтром Fcos;
причем для определения времени прихода сигнала волны осуществляют:
определение точки перегиба посредством построения на каждом дискретном участке анализируемого сигнала кубической интерполяции по четырём точкам;
определение точки перегиба фронта анализируемого сигнала для определения время прихода сигнала.
10. Устройство определения времени прихода импульсов, содержащее:
устройство обработки данных, включающее полосовой фильтр, синусный, косинусный фильтры, умножители и сумматор, излучатель сигнала, приемник, АЦП, генератор тактового сигнала, выход приемника соединен через АЦП с полосовым фильтром, к выходу которого параллельно подключены синусный и косинусный фильтры, выходы синусного и косинусного фильтров соединены с сумматором через умножители, при этом устройсво обработки данных выполнено с возможностью: определять огибающую амплитуды сигнала в каждой точке семплирования, определять анализируемый сигнал на основе огибающей амплитуды принятого сигнала, причем анализируемый сигнал пропорционален мощности принимаемого сигнала, и на основе анализируемого сигнала определять время прихода импульсов.
11. Устройство по п. 10, отличающееся тем, что дополнительно содержит генератор напряжения и излучатель сигнала, причем выход устройства обработки данных соединен со входом генератора напряжения, выход которого соединен с излучателем сигнала.
12. Устройство по п. 10, отличающееся тем, что сигнал представляет собой пучок, состоящий из по меньшей мере одной ультразвуковой или электромагнитной волны.
13. Устройство по п. 10, отличающееся тем, что принимаемый с помощью приемника сигнал оцифровывается с частотой, обеспечивающей восстановление сигнала с заданной частотой несущей.
14. Устройство по п. 13, отличающееся тем, что принимаемый с помощью приемника сигнал оцифровывается синхронно с излучаемым сигналом.
15. Устройство по любому из пп. 13 или 14, отличающийся тем, что сигнал оцифровывается с частотой, равной четырёхкратной частоте несущей.
16. Устройство по п. 10, отличающееся тем, коэффициенты синусного и косинусного фильтров представляют собой последовательности, описывающие по меньшей мере один полный период синуса и косинуса соответственно, и определяют частоту программного косинусно-синусного опорного генератора, причем опорная частота опорного генератора равна частоте несущей принимаемого сигнала.
17. Устройство по п. 10, отличающееся тем, что коэффициенты синусного и косинусного фильтров равны Fsin = [0 1 0 -1], Fcos = [1 0 -1 0], при условии, что частота дискретизации равна четырёхкратной частоте несущей согласно пп. 15 и 16.
18. Устройство по п. 10, отличающееся тем, что исследуемый сигнал определяется по формуле:
P(n) = V(n)^2 = Xsin(n)^2 + Xcos(n)^2, где V(n) – огибающая сигнала, P(n) = V(n)^2 - исследуемый (анализируемый) сигнал, Xsin(n) – фильтрованный сигнал фильтром Fsin, Xcos(n) – фильтрованный сигнал фильтром Fcos;
причем для определения времени прихода сигнала волны устройство обработки данных осуществляет:
определение точки перегиба посредством построения на каждом дискретном участке анализируемого сигнала кубической интерполяции по четырём точкам;
определение точки перегиба фронта анализируемого сигнала для определения время прихода сигнала.
19. Устройство по п. 10, отличающееся тем, что устройство обработки данных дополнительно содержит таймер для обеспечения возможности определения времени между посылкой и приходом сигнала.
20. Устройство по п. 10, отличающееся тем, что умножители выполнены с возможностью возведения в квадрат сигналов с выходов синусного и косинусного фильтров.
| УСТРОЙСТВО КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО УРОВНЕМЕРА | 2011 |
|
RU2470267C1 |
| US 5793704 A, 11.08.1998 | |||
| US 2014204700 A1, 24.07.2014 | |||
| Устройство для измерения скорости ультразвуковых волн | 1986 |
|
SU1384961A1 |
| Устройство для измерения скорости и спектрального коэффициента затухания ультразвуковых волн | 1988 |
|
SU1587347A1 |

