Изобретение относится к конструкции упругих муфт регулируемой жесткости и управляемых муфт, и может быть использовано при разработке робототехнических линий и комплексов, манипуляторов, шагающих и антропоморфных роботов, в которых требуется изменять параметры кинематических схем в процессе работы, или в приводах переменной жесткости. Изобретение может также использоваться в других областях техники, в которых применяются управляемые муфты регулируемой жесткости и приводы переменной жесткости.
Известна упругая муфта управляемой жесткости (CN 106182067 В), состоящая из двух полумуфт, установленного между ними промежуточного диска, и упругих стержней, проходящих через указанные элементы, которые расположены по окружности. Промежуточный диск связан со второй полумуфтой и имеет привод линейного перемещения. Это позволяет в зависимости от местоположения промежуточного диска иметь различную рабочую длину упругих стержней и, соответственно, жесткость муфты.
Известен управляемый привод переменной жесткости (CN 104029214 А), содержащий упругую муфту управляемой жесткости с ведомой полумуфтой, на которой перпендикулярно оси вращения установлены пластинчатые упругие элементы, и ведущей полумуфтой, на которой на приводимом в движении основании выполнены пазы для ввода упругих пластин. При перемещении основания с пазами изменяется рабочая длина пластинчатого упругого элемента и, соответственно, жесткость муфты.
Известен модуль соединения переменной жесткости (CN 104260106 А), содержащий первую полумуфту, на которой перпендикулярно оси вращения установлена упругая пластина, и вторую полумуфту, на которой на приводимом в движение основании выполнены пазы для ввода упругой пластины. При перемещении основания с пазами изменяется рабочая длина пластинчатого упругого элемента и, соответственно, жесткость муфты.
Известно вращающееся соединение переменной жесткости (CN 104608142 В), в котором на одной полумуфте установлены подпружиненные ролики, а на другой полумуфте - копиры для этих роликов. Форма копиров выполнена таким образом, что при повороте полумуфт в любую сторону идет сжатие пружин и, соответственно, увеличивается сопротивление вращению. Муфта содержит привод для изменения степени сжатия пружин, что приводит к переменной жесткости муфты.
Недостатком указанных устройств является сложность и невысокий диапазон регулирования жесткости.
По совокупности признаков наиболее близким прототипом изобретения является упругая муфта со стержневыми упругими элементами, содержащая две полумуфты, связанные между собой расположенными по окружности упругими стержневыми элементами (В.С. Поляков, И.Д. Барабаш, О.А. Ряховский Справочник по муфтам. Ленинград, Машиностроение (Ленинградское отделение, 1974 г., стр. 85-87).
Данное устройство не предназначено для регулирования жесткости в процессе работы.
Технической задачей изобретения является:
- обеспечение широкого диапазона плавного регулирования жесткости муфты;
- возможность переключения муфты регулируемой жесткости в жесткую муфту;
- придание муфте регулируемой жесткости дополнительной функции разъединения кинематической цепи;
- способность упругой муфты к изменению собственных параметров по команде системы управления оборудованием, где она установлена, или исходя из текущих параметров системы, и информирование системы управления оборудования, где она установлена, о текущих рабочих параметрах.
Технический результат обеспечивает упругая муфта регулируемой жесткости, содержащая две установленные соосно полумуфты с расположенными по окружности отверстиями и установленными в них упругими элементами, в которой, согласно предложенному решению, упругие элементы выполнены ступенчатыми, при этом расположенные в полумуфтах отверстия соответствуют размеру сопрягаемой ступени упругого элемента, упругие элементы выполнены подвижными.
Кроме того возможно, что:
- одна полумуфта установлена на другую;
- все упругие элементы соединены с единым приводом линейного перемещения;
- каждый упругий элемент соединен с индивидуальным приводом линейного перемещения;
- содержит датчик угла поворота полумуфт друг относительно друга.
- содержит управляющий котроллер и драйверы для управления приводами линейных перемещении упругих элементов.
- содержит по крайней мере, одно контактное кольцо для подачи электропитания и управляющих команд посредством электрического контакта.
- расположенные по окружности отверстия меньшего сечения выполнены ступенчатой формы с размерами на входе, соответствующими размерам ступеней упругого элемента большего сечения.
- длина упругих элементов не превышает ширины фланца полумуфты с расположенными по окружности отверстиями большого сечения.
Сущность изобретения поясняется следующим графическим материалом:
Фиг. 1 упругая муфта регулируемой жесткости с индивидуальным приводом линейного перемещения каждого упругого элемента.
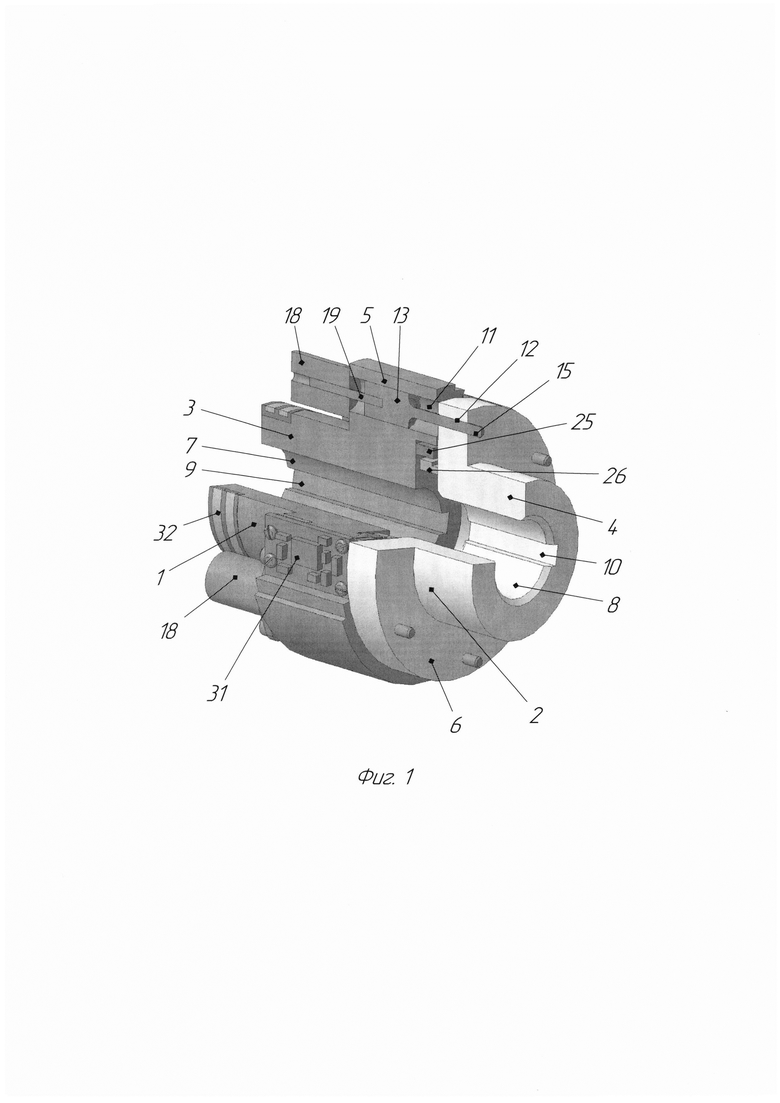
Фиг. 2 упругая муфта регулируемой жесткости с единым приводом линейного перемещения упругих элементов.
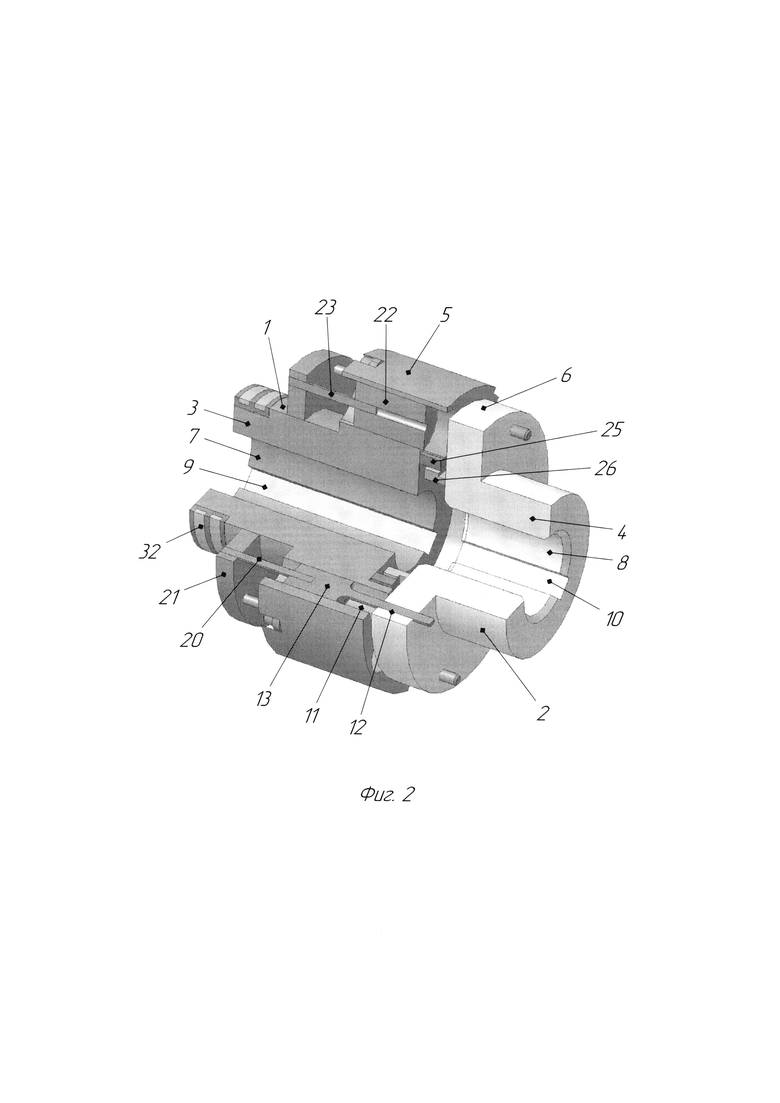
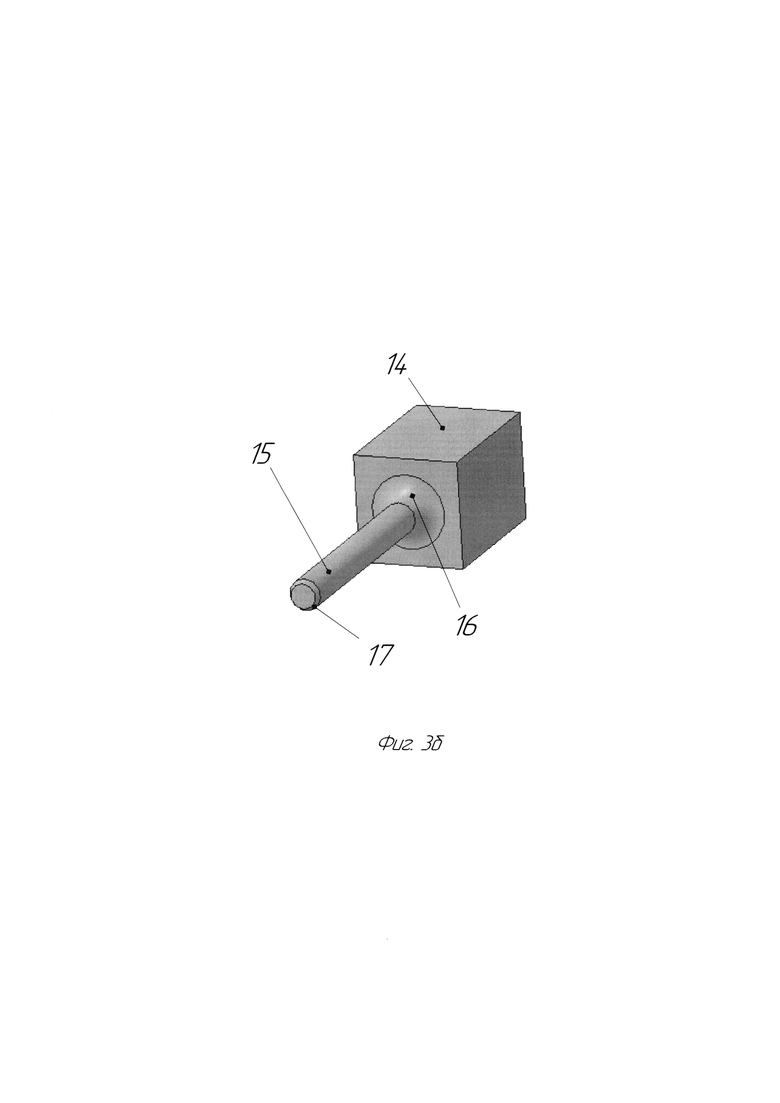
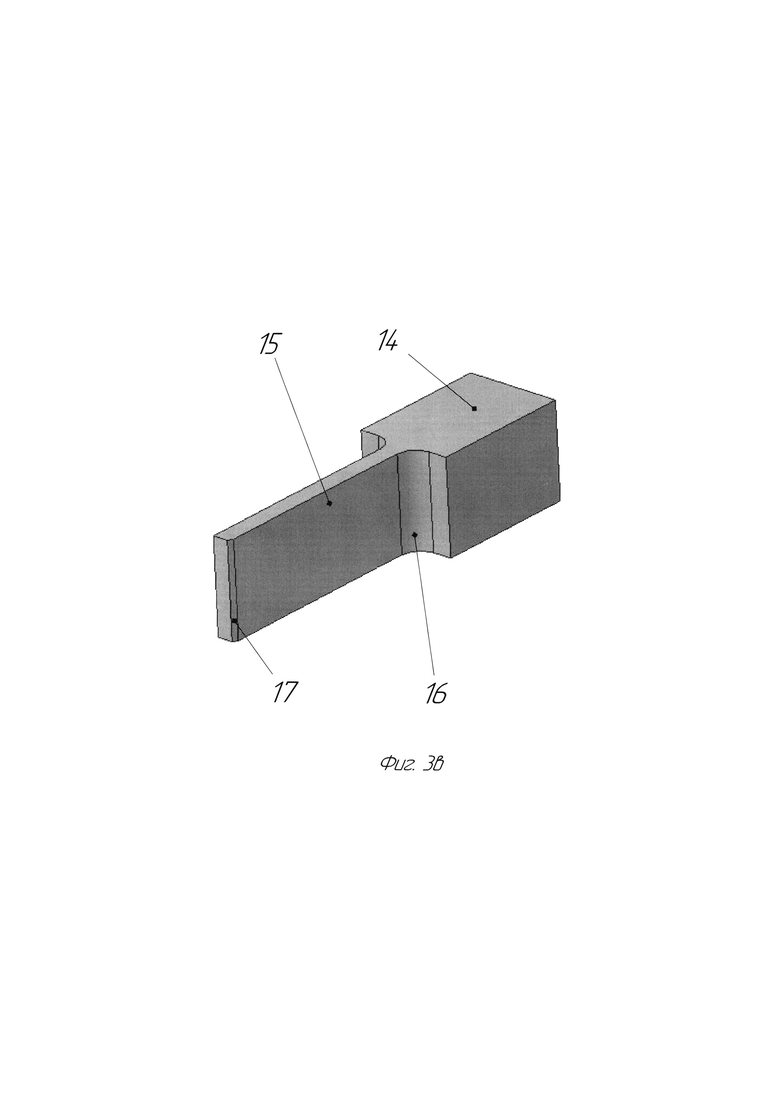
Фиг. 3а, 3б, 3в формы упругих элементов упругой муфты регулируемой жесткости.
Фиг. 4 Структурная схема упругой муфтой регулируемой жесткости
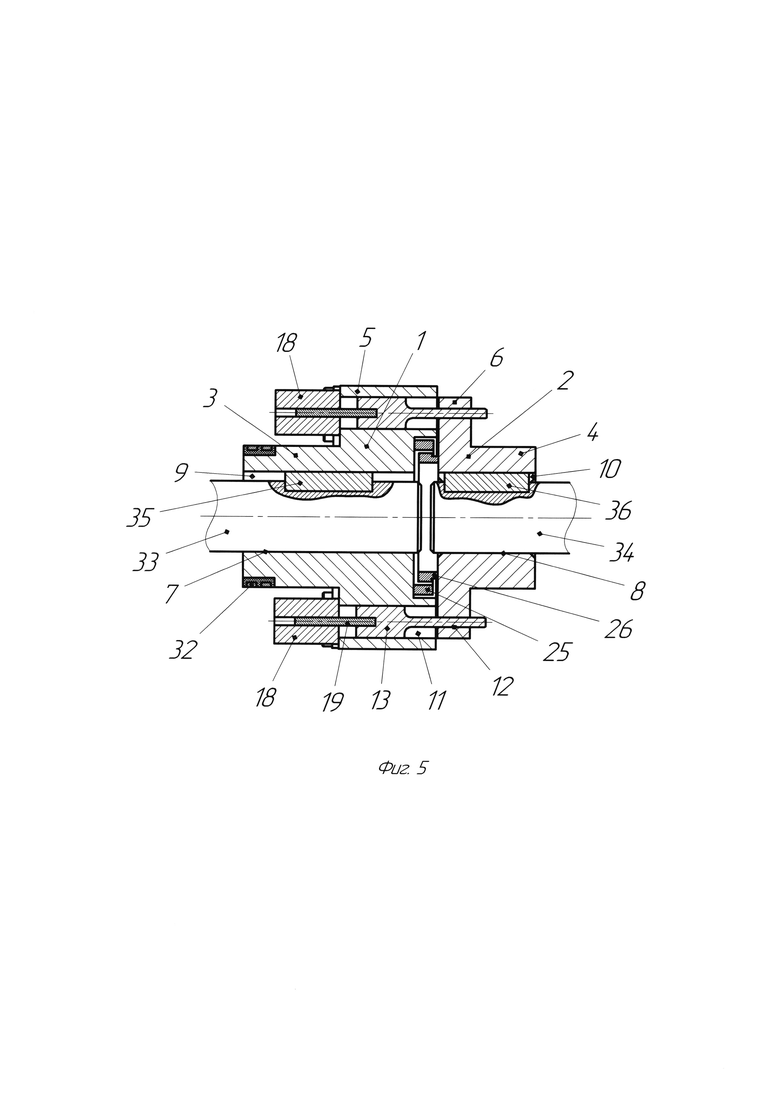
Фиг. 5 установка упругой муфты регулируемой жесткости на валы.
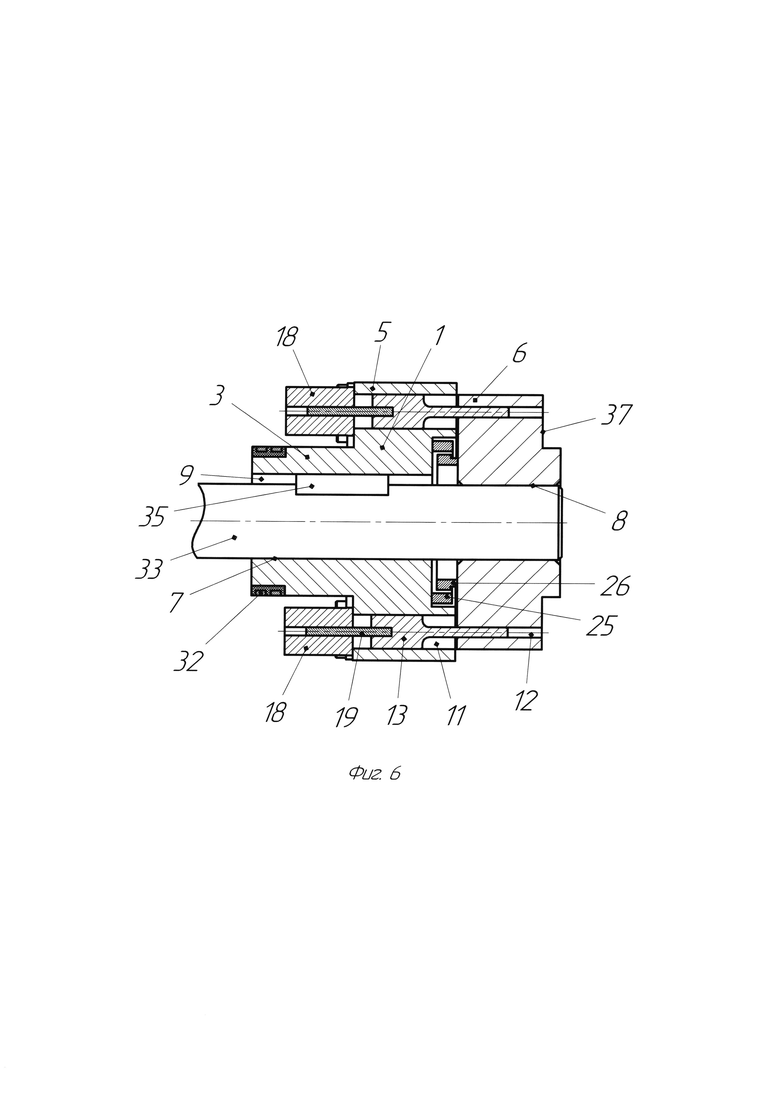
Фиг. 6 установка упругой муфты регулируемой жесткости на единый вал.
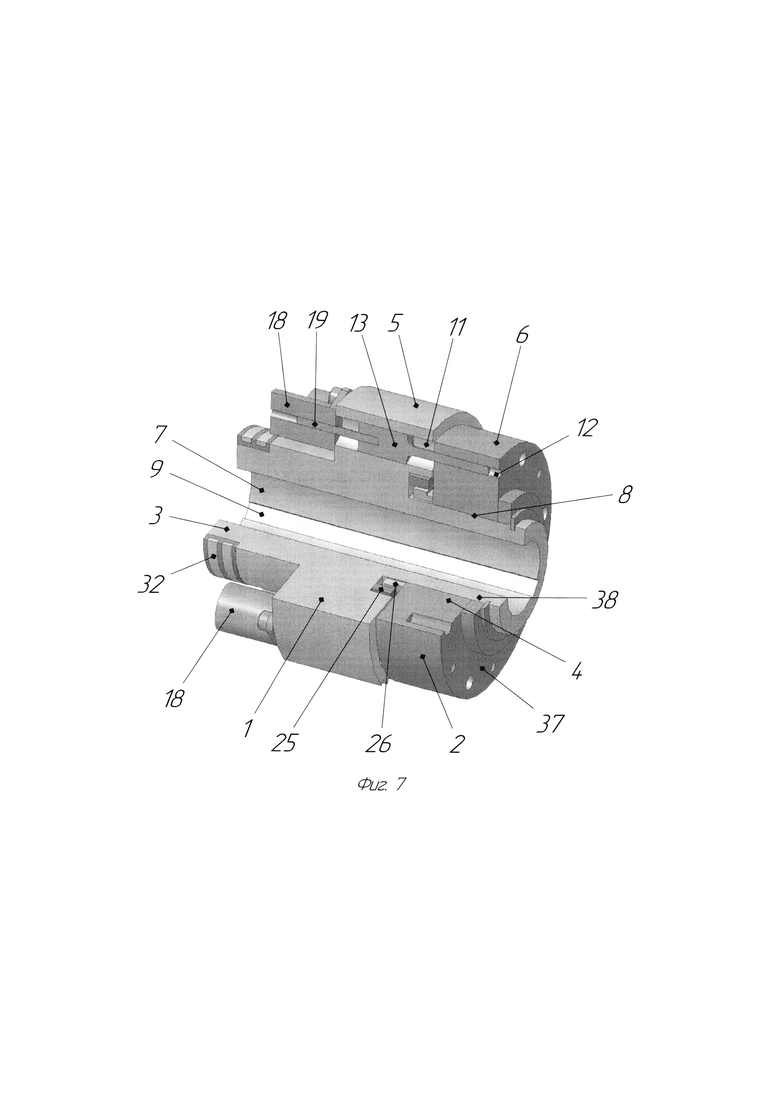
Фиг. 7 упругая муфта регулируемой жесткости в котором одна полумуфта установлена на другую.
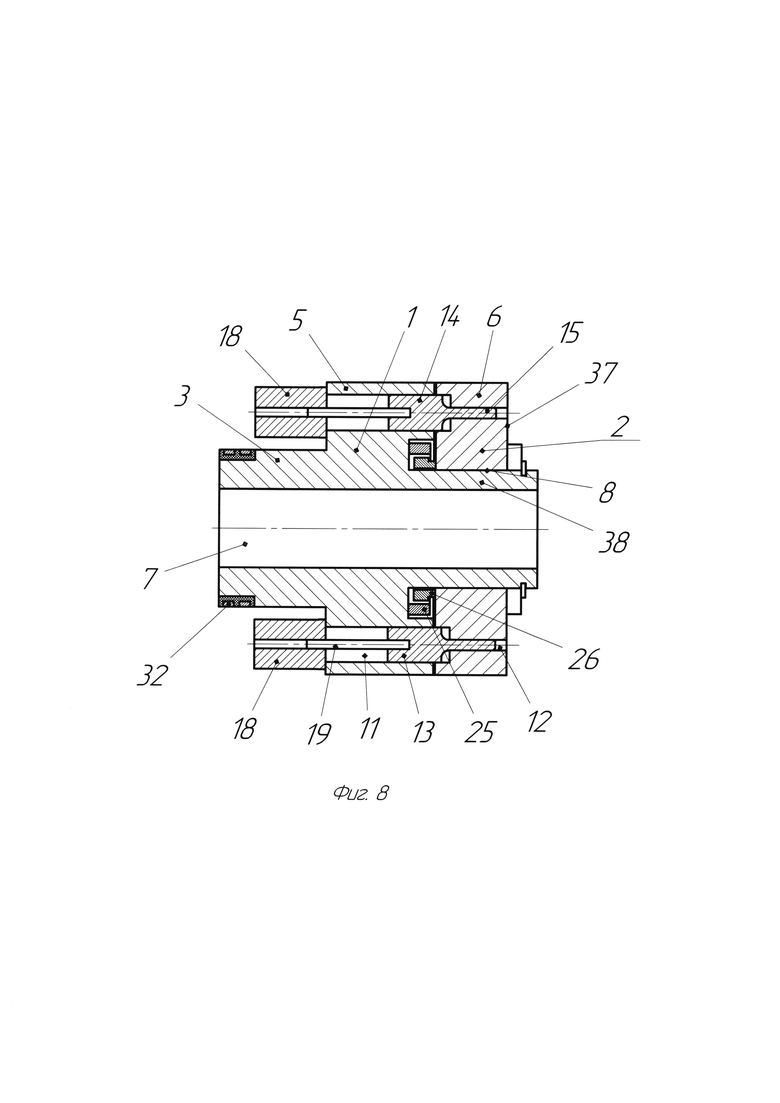
Фиг. 8 упругая муфта регулируемой жесткости, у которой расположенные по окружности отверстия в полумуфте выполнены ступенчатыми.
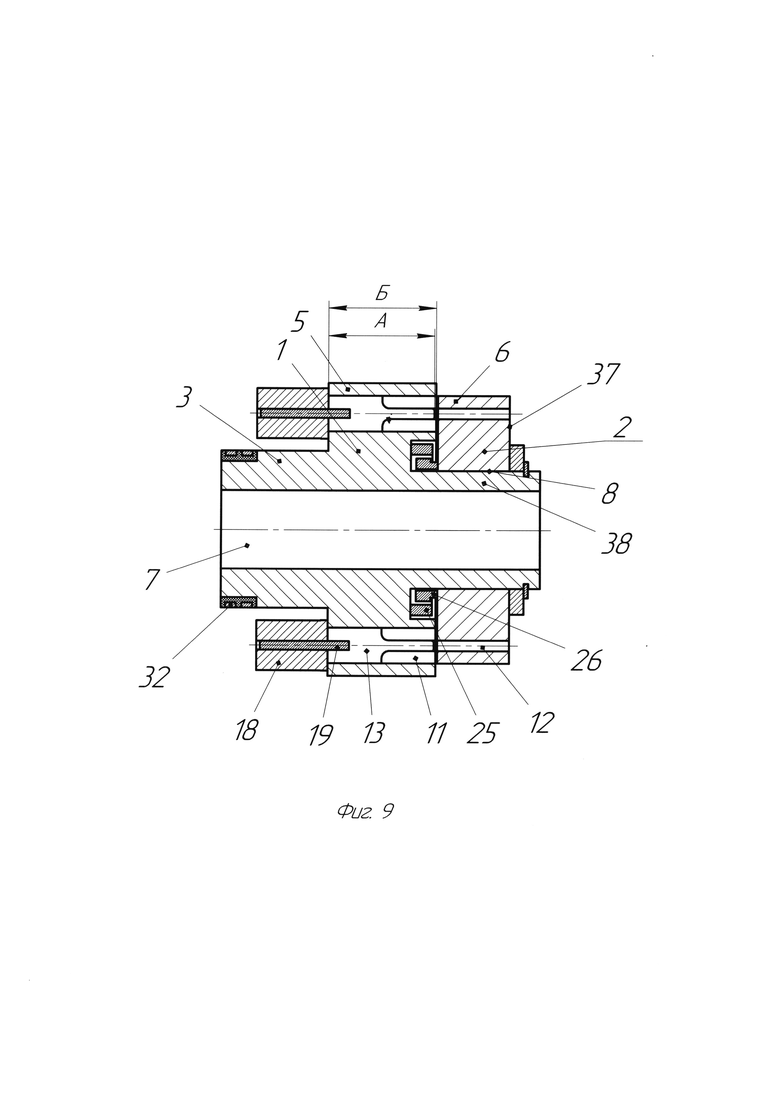
Фиг. 9 упругая муфта регулируемой жесткости, у которой длина упругого элемента выполнена не более ширины фланца полумуфты.
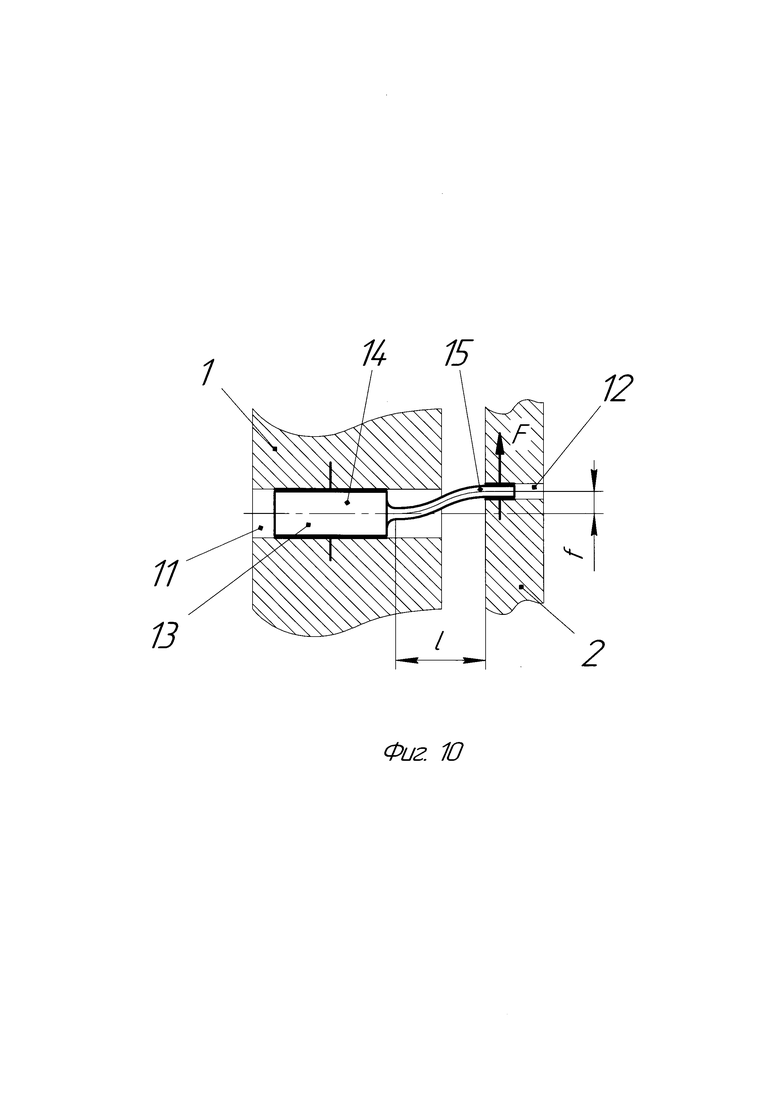
Фиг 10 Расчетная схема нагружения упругого элемента.
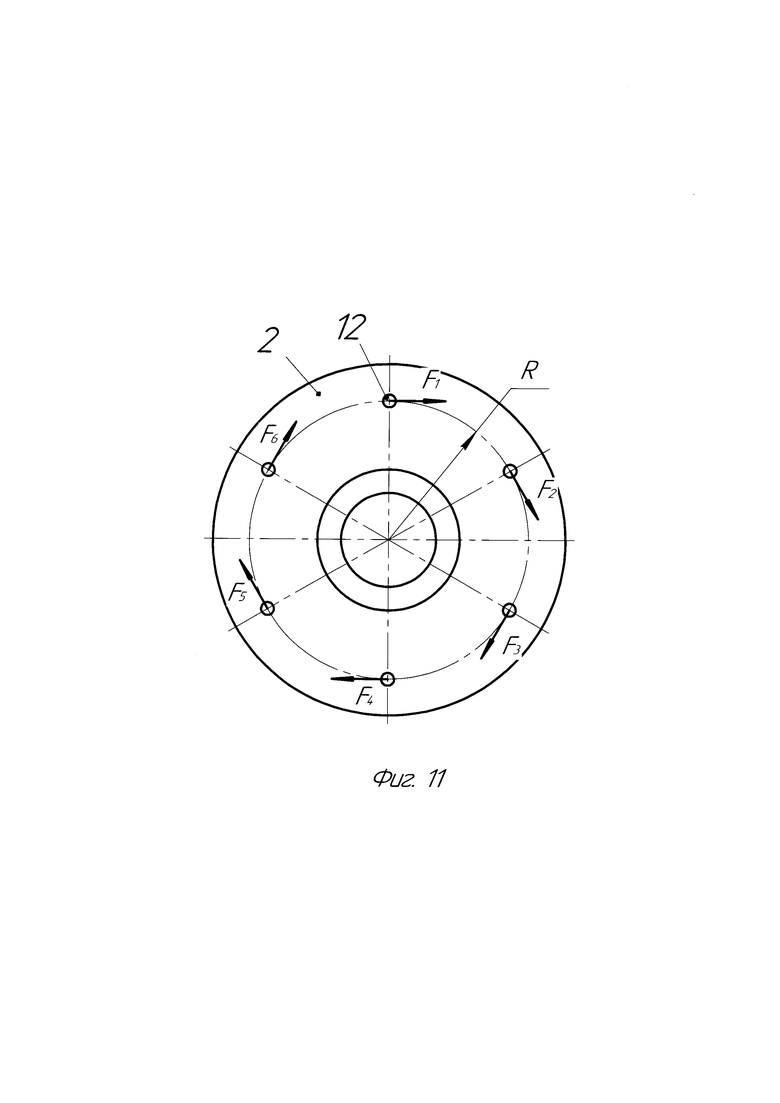
Фиг 11 Расчетная схема определения жесткости упругой муфты регулируемой жесткости.
Упругая муфта регулируемой жесткости фиг. 1 и фиг. 2 содержит установленные соосно полумуфты 1 и 2 со ступицами 3 и 4 и фланцами 5 и 6. В ступицах 3 и 4 по выполнены центральные отверстиями 7 и 8 со шпоночными пазами 9 и 10. Указанные отверстия могут быть без шпоночных пазов. На фланцах 5 и 6 по окружности выполнены соосные отверстия 11 и 12, в которые установлены упругие элементы 13. Отверстия 11 и соответствующие им отверстия 12 могут быть расположены как на одном радиусе, так и на разных, и соответственно упругие элементы 13 могут быть установлены на разных радиусах. На фиг. 1 и 2 все отверстия 11 и 12 расположены на одном радиусе.
Упругие элементы 13 выполнены ступенчатой формы и имеют ступень 14 большого сечения, которая устанавливается в отверстия 11 фланца 5 полумуфты 1 и ступень 15 малого сечения, которая устанавливается в отверстия 12 фланца 6 полумуфты 2. Размеры отверстий 11 соответствуют размерам ступени 14 упругого элемента 13. Размеры отверстий 12 соответствуют размерам ступени 15 упругого элемента 13. Каждая ступень 14 и 15 упругого элемента 13 входит в соответствующие отверстия 11 и 12 по посадке без зазора. Упругие элементы 13 выполнены подвижными, то есть имеют возможность перемещения вдоль собственной оси.
На фиг. 3а, 3б и 3в изображены варианты конструкции упругих элементов 13. Ступень 14 большого сечения может быть круглого (фиг. 3а), квадратного (фиг. 3б), прямоугольного (фиг. 3в) или многогранного сечения. Ступень 15 малого сечения может быть круглого (фиг. 3а, 3б), квадратного, прямоугольного (например, в виде пластины фиг. 3в), многогранника и т.п.сечений. Зона перехода может быть выполнена в виде галтели (радиусного перехода) 16 для снижения концентрации напряжения в данной зоне. Форма, размеры и ориентация ступени 15 малого сечения подбираются из условия получения требуемого усилия при изгибе и требуемой податливости. На конце ступени 15 выполнена заходная фаска 17. В одной муфте могут быть применены упругие элементы 13 с различной формой и размерами сечений ступеней 14 и 15. Это позволяет обеспечить широкий диапазон регулирования жесткости муфты.
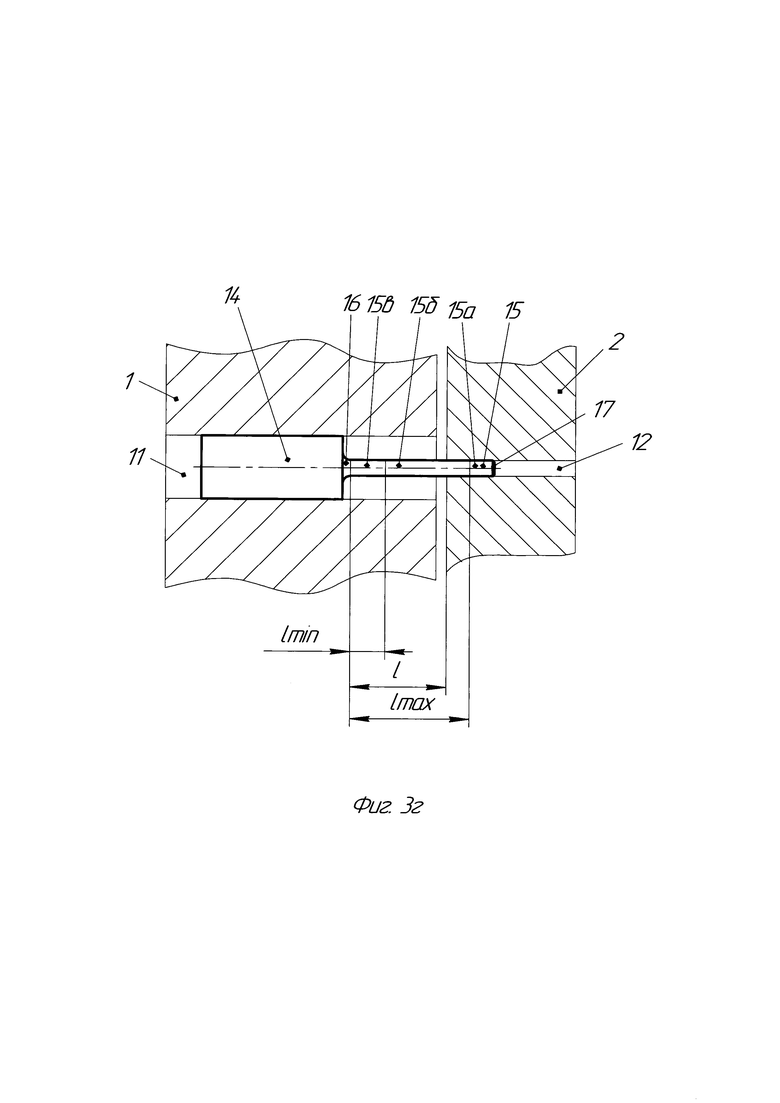
На фиг. 3г представлено распределение зон ступени 15 упругого элемента 13 при работе муфты. Ступень 15 входит на заданную глубину в отверстие 12 полумуфты 2. Свободная от отверстия 12 длина ступени 15 подвергается при работе муфты изгибу и образует рабочую длину  .
.
Минимальная величина входа ступени 15 в отверстие 12 обусловлена необходимостью исключения возможности заклинивания при движении. Данная зона обозначена поз.15а. При этом положении упругий элемент 13 имеет максимальную рабочую длину Imax
По мере ввода упругого элемента 13 в отверстие 12 рабочая длина сокращается, растет усилие, необходимое для смещения. Вместе с тем падает величина допустимого смещения. Поз. 156 обозначена зона ступени 15, которая может входить в отверстие 12 при регулировке жесткости. Поз 15в обозначена зона ступени 15, которая при рабочих режимах не входит в отверстие 12. Она ограничивает величину минимальной рабочей длины  .
.
Рабочая длина определяется от начала ступени 15. При наличии галтели 16 - от конца галтели 16.
Упругие элементы 13 выполнены подвижными и соединены с приводами линейного перемещения.
В упругой муфте регулируемой жесткости фиг. 1 каждый упругий элемент 13 соединен с индивидуальным приводом линейного перемещения, выполненным в виде линейного актуатора 18, установленного на полумуфте 1. Упругий элемент 13 соединен со штоком 19 актуатора 18.
В упругой муфте регулируемой жесткости фиг. 2 все упругие элементы 13 соединены с единым приводом линейных перемещении, который состоит из толкателей 20 с кольцевой плитой 21, которая в свою очередь через штоки 23 соединена с актуатором 22, возможен вариант (на фиг. 2 не показан) нескольких работающих синхронно актуаторов 22.
Упругая муфта регулируемой жесткости содержит следующие датчики.
Датчик угла поворота 24 (фиг. 4) одной полумуфты 1 относительно другой полумуфты 2, выполненного в виде энкодера или резольвера (вращающегося трансформатора). На фиг. 1 и 2 датчик угла поворота представлен в виде энкодера, содержащего наружный кольцевой датчик 25 и внутреннее магнитное кольцо 26.
Датчики положения 27 (фиг. 4) упругого элемента 13, которые могут быть встроены в актуаторы. На фиг 1 и 2 датчики положения не показаны.
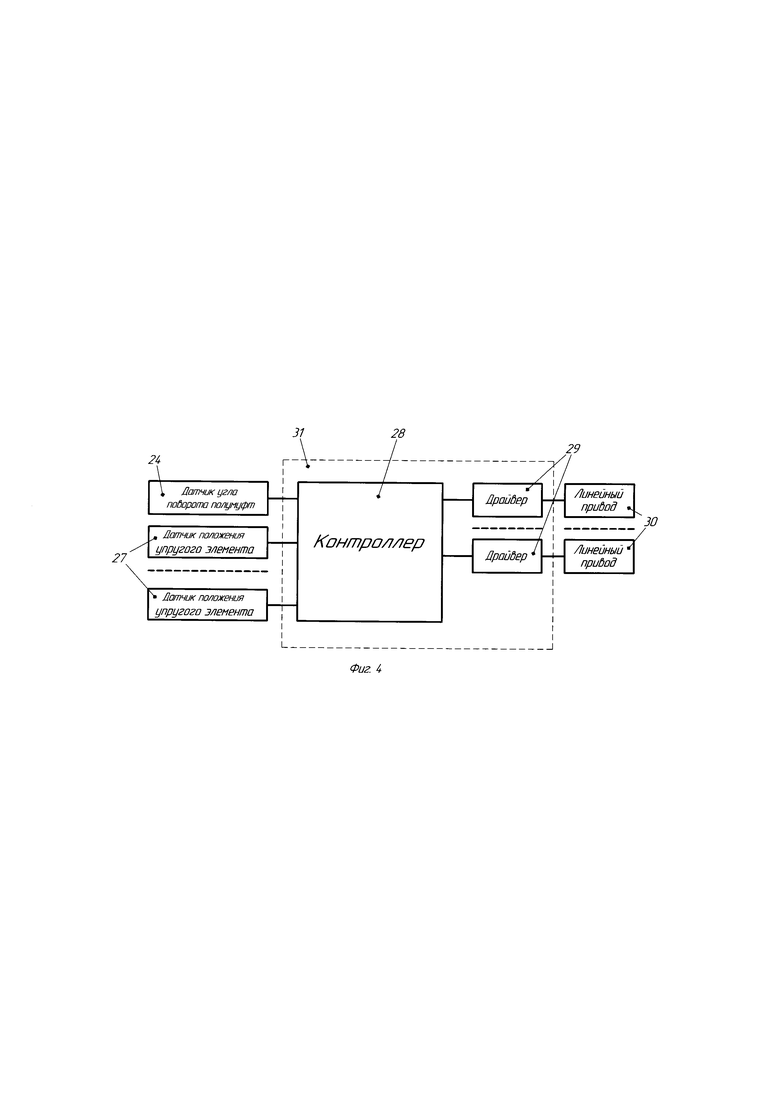
На фиг. 4 изображена структурная схема упругой муфтой переменной жесткости. Датчики 24 поворота полумуфт 1 и 2, и датчики 27 положения упругих элементов соединены с контроллером 28. На выходе контроллера 28 установлены драйверы 29 управления приводами линейных перемещений 30. Количество драйверов 29 определяется количеством линейных приводов 30. Контроллер 28 и драйверы 29 установлены на одну или несколько плат 31. На фиг. 4 контроллер 28 и драйверы 29 установлены на одну плату 31. Линейные приводы 30 представлены на фиг 1 в виде актуатора 18, на фиг. 2 в виде актуатора 22.
Для муфты, совершающей многооборотное вращательное движение на ступице 3 полумуфты 1 установлено не менее одного контактного кольца 32 для подачи электропитания и управляющих команд посредством электрического контакта. Количество контактных колец 32 определяется типом физического интерфейса системы.
Для упругих муфт, совершающих колебательные движения, к упругой муфте может быть подведен электрический кабель.
На фиг. 5 изображен чертеж варианта исполнения упругой муфты регулируемой жесткости, устанавливаемый на ведущий 33 и ведомый 34 валы. Полумуфты 1 и 2 установлены на шпонки 35 и 36 соответственно, которые не позволяют провернуться полумуфтам 1 и 2 на валах 33 и 34. Такая установка муфты требует строгой соосности валов 33 и 34. Несоосность установки валов 33 и 34 может приводить к некорректной работе муфты, т.к. несоосность вносит дополнительные нагрузки на упругие элементы 13 и приводит к изменениям передаваемого момента вращения.
На рис. 6 изображен чертеж варианта исполнения упругой муфты регулируемой жесткости, обе полумуфты 1 и 2 которого установлены на ведущем валу 33, причем ведущая полумуфта 1 установлена на шпонку 35, а ведомая полумуфта 2 установлена на вал 33 без шпонки и имеет возможность поворота на валу 33 относительно ведущей полумуфты 1. Такая установка упругой муфты упрощает конструкцию узла, если к ведомой муфте 2 соединен рычаг, зубчатое колесо или шкив.
Если к ведомой полумуфте 2 необходимо соединить следующий вал, он может быть соединен фланцем 37 ведомой полумуфты 2 с помощью фланцевого соединения через компенсирующую муфту (не изображено).
На фиг. 7 изображен вариант исполнения упругой муфты регулируемой жесткости, в котором одна полумуфта установлена на другую. Ступица полумуфты 1 продлена за фланец 5 и выполнена в виде полого вала 38. Полумуфта 2 имеет диаметр центрального отверстия 8 равную диаметру полого вала 38. Полумуфта 2 своим отверстием 8 установлена на полый вал 38, которая является частью полумуфты 1. Таким образом достигается строгая соосность отверстий 11 и 12 независимо от неточности установки ведомого вала, что повышает точность определения передаваемого момента. Ведомая полумуфта 2 может устанавливаться на ведущую полумуфту 1 на подшипники качения (не показано), что также повышает точность определения и передачи требуемого момента вращения. Такое исполнение упругой муфты упрощает конструкцию узла, если к ведомой муфте 2 соединен рычаг, зубчатое колесо или шкив. Если к ведомой полумуфте 2 необходимо соединить следующий вал, он может быть соединен на фланец 37 ведомой полумуфты 2 с помощью фланцевого соединения через компенсирующую муфту (не изображено).
Также следует отметить, что для качественной работы муфта полежит смазке и герметизации узлов трения от попадания пыли и грязи.
На фиг. 8 изображен чертеж варианта исполнения упругой муфты регулируемой жесткости, в котором расположенные на полумуфте 2 отверстия 12 меньшего сечения выполнены ступенчатой формы с размерами на входе, соответствующими размерам ступеней 14 большего сечения упругого элемента 13. Расположенные по окружности отверстия 12 меньшего сечения на полумуфте 2 выполнены ступенчатой формы с размерами на входе, соответствующими размерам ступеней 14 большего сечения упругого элемента 13 (или размерам отверстии 11 на полумуфте 1). Актуатор 18 позволяет перемещать упругий элемент 13 и вводить ступени 14 большого сечения упругого элемента 13 в отверстие 12 на полумуфте 2. При таком положении упругих элементов 13 ступени 15 малого размера выводятся из работы, муфта переключается в режим жесткой муфты и может передавать намного больший момент вращения, чем при работе ступени 15 малого сечения упругого элемента 13. Такой режим работы муфты может быть полезен в режимах работы оборудования, когда требуется жесткая передача момента вращения.
На фиг. 9 изображен чертеж варианта исполнения упругой муфты регулируемой жесткости, в котором длина А упругих элементов 13 не превышает ширины Б фланца 5 полумуфты 1 с расположенными по окружности отверстиями 11 большого сечения. При таком соотношении размеров при вытягивании актуаторами 18 упругих элементов 13 они полностью выводятся из расположенных по окружности отверстии 12 меньшего сечения полумуфты 2. Таким образом, при таком положении упругих элементов 13 происходит разъединение кинематической цепи, т.е. не происходит передачи момента вращения между полумуфтами 1 и 2, и они могут свободно вращаться друг относительно друга. Обратный ввод ступени 15 меньшего сечения в соответствующее отверстие возможно при нулевом повороте полумуфт 1 и 2 друг относительно друга или на конце упругого элемента и в сопрягаемом отверстии должны быть заходные фаски. Данный режим работы муфты пригоден для расцепления муфты, если это требуется программой работы оборудования, где она установлена.
Упругая муфта регулируемой жесткости, содержащая признаки, указанные на фиг. 8 и фиг. 9 покрывает большой диапазон упругости, одновременно служить жесткой и разъединяемой муфтой.
На фиг. 10 изображена расчетная схема для определения прогиба ступени 15 малого сечения упругого элемента 13 и возникающих при этом усилий. Ступень 15 рассматривается как балка, защемленная по обоим концам с возможностью продольного перемещения одного конца. Концы балки подвержены плоскопараллельному переносу.
Приняты следующие обозначения
- рабочая длина балки - длина от начала ступени 15 малого сечения упругого элемента 13 до точки входа малого сечения в отверстие 12 полумуфты 2. Данная величина зависит от местоположения упругого элемента 13 и подлежит изменению при необходимости изменения жесткости муфты;
ƒ - плоско-параллельное смещение концов балки друг относительно друга;
F - усилие, необходимое для получения требуемого смещения ƒ.
Усилие, необходимое для смещения одного конца балки относительно другой при заданной схеме нагружения составляет.

Где
Е - модуль упругости первого рода материала упругого элемента 13;
J - момент инерции сечения ступени 15 меньшего сечения упругого элемента 13.
(Писаренко Г.С., Яковлев А.П., Матвеев В.В. Справочник по сопротивлению материалов. Киев, Наукова думка 1988 г, стр. 368).
На фиг. 11 изображена расчетная схема для определения момента, развиваемого упругой муфтой.
Учитывая, что упругие элементы 13 (фиг. 1, фиг. 2) могут иметь индивидуальные приводы линейных перемещений 30 (фиг. 4), они могут выдвигаться на различную рабочую длину и оказывать различное сопротивление F при одной и той же величине деформации ƒ Упругие элементы 13 могут быть установлены на разных радиусах R и соответственно иметь различную деформацию при одном и том же угле поворота одной полумуфты 1 относительно другой полумуфты 2. Соответственно, каждый упругий элемент 13 будет давать различный момент вращения.

где
Mi - момент, создаваемый единичным упругим элементом 13;
Fi - усилие, создаваемое единичным упругим элементом 13;
Ri - радиус расположения упругих элементов 13.
Суммарный момент будет соответственно

где
n - количество упругих элементов;
М - суммарный момент.
В случае расположения всех упругих элементов 13 на одном радиусе R выражение момента упрощается.

где
Ji - момент инерции меньшего сечения i-того упругого элемента 13;
 - рабочая длина i-того упругого элемента 13.
- рабочая длина i-того упругого элемента 13.
Величина деформации упругих элементов 13 связана с углом поворота одной полумуфты 1 относительно другой полумуфты 2 выражением

где
α - угол поворота одной полумуфты 1 относительно другой полумуфты 2 в радианах.
Учитывая это, момент муфты составит

Жесткость муфты

Как видно из выражения (7) момент, развиваемый упругой муфтой, зависит от угла поворота а одной полумуфты 1 относительно другой полумуфты 2, момента инерции сечения ступени 15 упругого элемента 13 и рабочей длины  упругих элементов 13. Разные упругие элементы 13 могут иметь различные моменты инерции сечений и установлены так, что имеют различную рабочую длину
упругих элементов 13. Разные упругие элементы 13 могут иметь различные моменты инерции сечений и установлены так, что имеют различную рабочую длину  Также возможна работа, при которой часть упругих элементов 13 выведена из полумуфты 2. Это дает возможность для широкого и плавного регулирования жесткости муфты.
Также возможна работа, при которой часть упругих элементов 13 выведена из полумуфты 2. Это дает возможность для широкого и плавного регулирования жесткости муфты.
Упругая муфта регулируемой жесткости работает следующим образом.
В зависимости от требуемой жесткости контроллер 28 рассчитывает необходимые рабочие длины  каждого упругого элемента 13 и подает команду на драйверы 29 управления приводами линейных перемещении 30 (ими являются актуатор 18 на фиг. 1 или актуатор 22 на фиг. 2). Приводы линейных перемещении 30 перемещают упругие элементы 13 и выставляют требуемые рабочие длины упругих элементов 13. При вращении муфты за счет передаваемого момента вращения одна полумуфта 1 поворачивается относительно другой полумуфты 2 изгибая ступени 15 меньшего сечения упругих элементов 13. Контроллер 28 контролирует угол поворота одной полумуфты 1 относительно другой полумуфты 2 по показаниям датчика угла поворота 24 и рассчитывает фактический момент, предаваемый муфтой. В процессе работы по команде системы управления устройства, где установлена муфта, контроллер 28 может изменять жесткость муфты на требуемую величину. В случае непредвиденного увеличения передаваемого момента контроллер 28 может дать команду на увеличение жесткости муфты, если это угрожает разрушением муфты. Контроллер 28 может также управлять жесткостью муфты по заложенной заранее программе в зависимости от выполняемых оборудованием операций, условий работы или передаваемого момента вращения.
каждого упругого элемента 13 и подает команду на драйверы 29 управления приводами линейных перемещении 30 (ими являются актуатор 18 на фиг. 1 или актуатор 22 на фиг. 2). Приводы линейных перемещении 30 перемещают упругие элементы 13 и выставляют требуемые рабочие длины упругих элементов 13. При вращении муфты за счет передаваемого момента вращения одна полумуфта 1 поворачивается относительно другой полумуфты 2 изгибая ступени 15 меньшего сечения упругих элементов 13. Контроллер 28 контролирует угол поворота одной полумуфты 1 относительно другой полумуфты 2 по показаниям датчика угла поворота 24 и рассчитывает фактический момент, предаваемый муфтой. В процессе работы по команде системы управления устройства, где установлена муфта, контроллер 28 может изменять жесткость муфты на требуемую величину. В случае непредвиденного увеличения передаваемого момента контроллер 28 может дать команду на увеличение жесткости муфты, если это угрожает разрушением муфты. Контроллер 28 может также управлять жесткостью муфты по заложенной заранее программе в зависимости от выполняемых оборудованием операций, условий работы или передаваемого момента вращения.
В варианте исполнения упругой муфты регулируемой жесткости, в котором каждый упругий элемент 13 соединен с индивидуальным приводом линейного перемещения - актуатором 18 (фиг. 1), имеется возможность широкого регулирования жесткости. Наименьшая жесткость может быть достигнута при работе одного упругого элемента 13 на максимально возможной рабочей длине  наибольшая жесткость обеспечивается работой всех упругих элементов 13 на минимальной рабочей длине . Промежуточные величины жесткости достигаются введением каждого последующего упругого элемента 13 от максимальной
наибольшая жесткость обеспечивается работой всех упругих элементов 13 на минимальной рабочей длине . Промежуточные величины жесткости достигаются введением каждого последующего упругого элемента 13 от максимальной 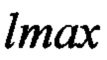 до минимальной рабочей длины. При этом каждый упругий элемент 13 добавляет свою долю жесткости. Для изменения жесткости муфты от минимальной до максимальной величины производится последовательный ввод каждого упругого элемента 13 на требуемую рабочую длину
до минимальной рабочей длины. При этом каждый упругий элемент 13 добавляет свою долю жесткости. Для изменения жесткости муфты от минимальной до максимальной величины производится последовательный ввод каждого упругого элемента 13 на требуемую рабочую длину 
В муфте фиг. 2 все упругие элементы 13 соединены с единым приводом линейного перемещения. Общий ход актуатора 22 составляет длину рабочего участка упругого элемента 13.
В муфте фиг. 1 каждый упругий элемент соединен со своим индивидуальным актуатором 18. Для покрытия всего диапазона жесткости каждый актуатор выдвигает упругий элемент на длину зоны 156 ступени 15 малого сечения упругого элемента 13. Таким образом, общий суммарный ход актуаторов 18 больше хода актуатора 22 (фиг. 2) во столько раз, сколько имеется упругих элементов. Приводя в движение каждый актуатор 18, мы имеем возможность более плавного регулирования жесткости муфты.
В варианте исполнения упругой муфты регулируемой жесткости, в которой все упругие элементы 13 соединены с единым приводом линейного перемещения (фиг. 2) рабочие длины всех упругих элементов 13 выставляются актуаторами 22, которые своими штоками 23 толкают единую плиту 21, а она в свою очередь через толкатели 20 выставляет местоположение упругих элементов 13. При этом, все упругие элементы 13 работают при равных условиях и с наименьшей для заданного момента нагрузке. Однако, данный вариант муфты имеет ограничение по диапазону жесткости и плавности регулирования жесткости.
Упругая муфта регулируемой жесткости, в которой расположенные по окружности отверстия 12 меньшего сечения выполнены ступенчатой формы с размерами на входе, соответствующими размерам ступеней 14 большего сечения упругого элемента 13 (фиг. 8) имеет возможность вводить ступени 14 большого сечения упругих элементов 13 в полумуфту 2. Это позволяет переключать упругую муфту в жесткую.
Упругая муфта регулируемой жесткости, в которой длина упругих элементов 13 не превышает ширины фланца 5 полумуфты 2 с расположенными по окружности отверстиями 11 большого сечения (фиг. 9), дает возможность полного вывода упругих элементов 13 из полумуфты 2. Это позволяет задавать количество одновременно работающих упругих элементов 13 от одного до общего их количества или постностью рассоединить полумуфты 1 и 2, и добиться разъединения кинематической цепи, т.е. исключить передачу момента вращения. Таким образом достигается широкий диапазон регулирования жесткости муфты.
Комбинация вариантов упругой муфты исполнении фиг. 8 и фиг. 9 позволяет получить функции жесткой муфты, упругой муфты регулируемой жесткости и отключаемой муфты в одном изделии.
Наличие контроллера 28 позволяет получить «умную» муфту с оптимальным управлением, защитой от разрушения и информированием системы управления оборудования, на которое она установлена, о передаваемом моменте и об угле α поворота одной полумуфты 1 относительно другой полумуфты 2 и т.п. В контроллер 28 может быть также заложена программа управления жесткостью от условий работы и передаваемого момента вращения.
Таким образом:
Выполнение упругого элемента упругой муфты ступенчатым и подвижным, а также соединение каждого упругого элемента с индивидуальным приводом позволило получить широкий диапазон плавного регулирования жесткости.
Выполнение расположенных на фланце полумуфты по окружности отверстий меньшего сечения ступенчатой формы с размерами на входе, соответствующими размерам ступеней упругого элемента большего сечения, позволило переключать упругую муфту в жесткую.
Выполнение длины упругих элементов не превышающим ширины фланца полумуфты с расположенными по окружности отверстиями большого сечения позволило разъединять кинематическую цепь.
Использование датчика поворота одной полумуфты относительно другой, датчиков положения упругих элементов и котроллера позволило обеспечить возможность упругой муфте изменять его рабочие параметры по команде системы управления оборудованием, на которое она установлена, или исходя из текущих параметров системы, и информировать систему управления оборудования, на которое она установлена, о текущих рабочих параметрах.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРУГАЯ КОМПЕНСИРУЮЩАЯ МУФТА | 2018 |
|
RU2679519C1 |
| Механизм подачи шпинделя сверлильного станка | 1980 |
|
SU933292A1 |
| Автономный мобильный модуль роботизированного хирургического инструмента | 2019 |
|
RU2715684C1 |
| Упругокомпенсационная муфта | 1990 |
|
SU1803628A1 |
| Упругокомпенсационная муфта | 1991 |
|
SU1783186A1 |
| Упругая муфта | 1985 |
|
SU1291748A1 |
| Фрикционная предохранительная муфта | 1984 |
|
SU1244412A1 |
| Переносная моторная пила | 1980 |
|
SU874336A1 |
| Упругая муфта | 1983 |
|
SU1186856A1 |
| Фрикционная муфта с гидравлическим управлением | 1983 |
|
SU1146492A1 |
Изобретение относится к области машиностроения, а более конкретно к упругим муфтам. Упругая муфта регулируемой жесткости содержит две установленные соосно полумуфты с расположенными по окружности отверстиями и установленными в них упругими элементами. Упругие элементы выполнены ступенчатыми и подвижными. Расположенные в полумуфтах отверстия соответствуют размеру сопрягаемой ступени упругого элемента. Достигается увеличение диапазона регулирования жесткости. 8 з.п. ф-лы, 14 ил.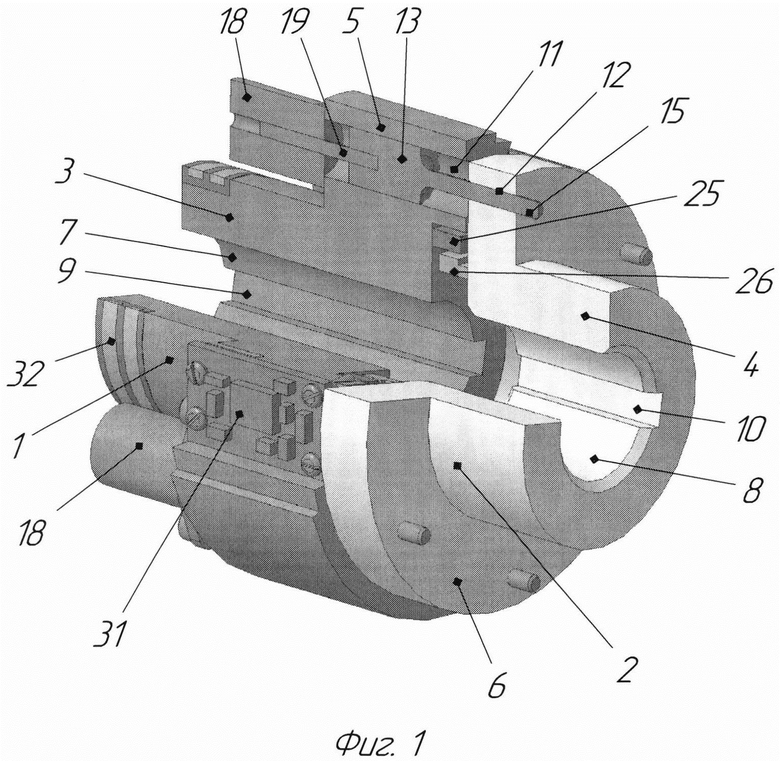
1. Упругая муфта регулируемой жесткости, содержащая две установленные соосно полумуфты с расположенными по окружности отверстиями и установленными в них упругими элементами, отличающаяся тем, что упругие элементы выполнены ступенчатыми, при этом расположенные в полумуфтах отверстия соответствуют размеру сопрягаемой ступени упругого элемента, упругие элементы выполнены подвижными.
2. Упругая муфта по п. 1, отличающаяся тем, что одна полумуфта установлена на другую.
3. Упругая муфта по п. 1, отличающаяся тем, что все упругие элементы соединены с единым приводом линейного перемещения.
4. Упругая муфта по п. 1, отличающаяся тем, что каждый упругий элемент соединен с индивидуальным приводом линейного перемещения.
5. Упругая муфта по п. 1, отличающаяся тем, что содержит датчик угла поворота полумуфт друг относительно друга.
6. Упругая муфта по п. 1, отличающаяся тем, что содержит управляющий котроллер и драйверы для управления приводами линейных перемещений упругих элементов.
7. Упругая муфта по п. 1, отличающаяся тем, что содержит по крайней мере одно контактное кольцо для подачи электропитания и управляющих команд посредством электрического контакта.
8. Упругая муфта по п. 1, отличающаяся тем, что расположенные по окружности отверстия меньшего сечения выполнены ступенчатой формы с размерами на входе, соответствующими размерам ступеней упругого элемента большего сечения.
9. Упругая муфта по п. 1, отличающаяся тем, что длина упругих элементов не превышает ширины фланца полумуфты с расположенными по окружности отверстиями большого сечения.
| Торсионная муфта | 1990 |
|
SU1788360A1 |
| Упругокомпенсационная муфта | 1991 |
|
SU1783186A1 |
| DE 3502516 A, 31.07.1986 | |||
| US 8376649 B2, 19.02.2013. | |||

