ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к модулю лазерного датчика, использующему интерференцию или альтернативно интерференцию само-смешивания (интерференцию биений, автодинную интерференцию) для обнаружения плотности частиц, к связанному способу определения плотности частиц и к соответствующему компьютерному программному продукту. Кроме того, изобретение относится к устройству мобильной связи, содержащему такой модуль лазерного датчика.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
DE 10 2015 207 289 A1 раскрывает устройство датчика частиц, имеющее устройство оптического излучателя, которое сконфигурировано, чтобы излучать оптическое излучение, так что объем, имеющий по меньшей мере одну частицу, возможно, присутствующую в нем, может по меньшей мере частично подсвечиваться; устройство оптического детектора, имеющее по меньшей мере одну поверхность обнаружения, на которую падает по меньшей мере часть оптического излучения, рассеянного на по меньшей мере одной частице, при этом по меньшей мере один сигнал информации относительно интенсивности и/или распределения интенсивности оптического излучения, падающего на по меньшей мере одну поверхность обнаружения, может отображаться; и устройство оценки, посредством которого элемент информации относительно присутствия частиц, числа частиц, плотности частиц и/или по меньшей мере одного свойства частиц может идентифицироваться и отображаться, причем устройство датчика частиц также включает в себя по меньшей мере один элемент линзы, который расположен таким образом, что излучаемое оптическое излучение может фокусироваться в область фокуса внутри объема. Устройство датчика частиц содержит устройство зеркала, которое выполнено с возможностью перемещения области фокуса, чтобы подавлять влияние скорости ветра.
US 9,354,315 В2 раскрывает устройство, которое содержит: излучающий элемент для излучения лазерного луча, называемого излученным лучом; фокусирующий элемент для фокусировки излученного луча на заданном фокусном расстоянии; приемный элемент для приема излученного луча после отражения частицей в воздухе, называемого отраженным лучом; передающий элемент для передачи сигнала интерференции, происходящей между излученным лучом и отраженным лучом, на сигнальный процессор, чтобы вывести из него скорость частиц. Излучающий элемент включает в себя лазерный диод, и приемный элемент комбинируется с лазерным диодом посредством само-смешивания. Фокусное расстояние составляет от 5 см до 2 м.
КРАТКОЕ ОПИСАНИЕ СущностИ изобретения
Задачей настоящего изобретения является создание усовершенствованного и упрощенного модуля лазерного датчика для определения плотности частиц. Изобретение определено независимыми пунктами формулы изобретения. Зависимые пункты формулы изобретения определяют предпочтительные варианты осуществления.
Согласно первому аспекту, обеспечен модуль лазерного датчика для определения плотности частиц мелких частиц (твердых или жидких частиц, которые могут оставаться взвешенными в воздухе и распространяются ветром). Размер частиц, как правило, меньше, чем 20 мкм или даже 10 мкм. Частицы могут, например, характеризоваться размером от 0,05 мкм до 10 мкм, предпочтительно от 0,1 до 2,5 мкм. Модуль лазерного датчика содержит:
по меньшей мере первый лазер, выполненный, чтобы излучать первый измерительный луч, и по меньшей мере второй лазер, выполненный, чтобы излучать второй измерительный луч,
оптический узел, выполненный, чтобы фокусировать по меньшей мере первый измерительный луч в первый измерительный объем, причем оптический узел дополнительно выполнен, чтобы фокусировать по меньшей мере второй измерительный луч во второй измерительный объем, при этом оптический узел характеризуются первой числовой апертурой относительно первого измерительного луча и второй числовой апертурой относительно второго измерительного луча, причем первая числовая апертура и вторая числовая апертура выполнены, чтобы обнаруживать предопределенный минимальный размер частиц при опорной скорости, причем опорная скорость выбрана в пределах предопределенного диапазона скоростей, и причем первый измерительный луч и второй измерительный луч взаимно образуют угол φ между 10° и 160°,
первый детектор выполнен, чтобы определять первый сигнал интерференции или первый сигнал интерференции само-смешивания первой оптической волны в первом лазерном резонаторе первого лазера,
второй детектор выполнен, чтобы определять второй сигнал интерференции или второй сигнал интерференции само-смешивания второй оптической волны во втором лазерном резонаторе второго лазера,
блок оценки, причем блок оценки выполнен, чтобы принимать сигналы обнаружения, сгенерированные первым детектором и вторым детектором в ответ на определенные сигналы интерференции или сигналы интерференции само-смешивания, причем блок оценки дополнительно выполнен, чтобы определять первую среднюю скорость частиц, обнаруженных первым детектором, и вторую среднюю скорость частиц, обнаруженных вторым детектором, посредством сигналов детектирования, принятых в предопределенном периоде времени, причем блок оценки дополнительно выполнен, чтобы определять первое число частиц на основе сигналов обнаружения, обеспеченных первым детектором в предопределенном периоде времени, и второе число частиц на основе обнаруженных сигналов, обеспеченных вторым детектором в предопределенном периоде времени, и причем блок оценки дополнительно выполнен, чтобы определять плотность частиц на основе средней скорости частиц, определенной посредством первой средней скорости и второй средней скорости, первого числа частиц и второго числа частиц. Предопределенный диапазон скоростей может быть в диапазоне между 0,01 м/с и 7 м/с.
Оптические методы зондирования для обнаружения частиц и особенно для определения плотности частиц обычно используют измерительный объем с известным потоком частиц. Это означает, что скорость и направление потока частиц по отношению к измерительному лучу известны. Поток частиц может быть определен посредством, например, вентилятора, так что частицы движутся, или посредством, например, MEMS зеркала, которое перемещает измерительный луч по отношению к частицам. Влияние скорости ветра относительно детектируемого объема за единицу времени наблюдения можно уменьшить или даже исключить этими мерами. Модули оптических датчиков, использующие такие методы, являются громоздкими и могут не подходить для всех применений зондирования частиц.
Модуль лазерного датчика, описанный выше, позволяет осуществлять обнаружение частиц без обеспечения предопределенного направления потока и скорости частиц. Первые и вторые сигналы интерференции или сигналы само-смешивания используются для определения числа частиц и средней скорости частиц, так что можно определить среднюю скорость, особенно в двумерном потоке частиц (например, ветра над поверхностью). По меньшей мере, два лазерных луча или измерительных луча, взаимно охватывающих угол φ между 10° и 160° (предпочтительно между 20° и 140°, наиболее предпочтительно между 50° и 70°), используются для того, чтобы определить две независимые компоненты скорости, чтобы определить среднюю скорость. Кроме того, было выявлено, что частота отсчета остается той же самой, а также минимальный размер обнаруживаемых частиц остается постоянным, если отношение между средней скоростью и третьей степенью числовой апертуры оптики модуля датчика является постоянным. Это означает, что при более низкой средней скорости частиц числовая апертура оптики для фокусировки измерительных лучей в детектируемых объемах должна быть ниже. Модуль лазерного датчика или система обнаружения частиц, содержащая такой модуль, проектируется относительно опорной скорости. Числовая апертура оптического узла определяет в этом случае минимальный размер частиц, которые могут быть обнаружены при опорной скорости. Опорная скорость находится в пределах предопределенного диапазона скоростей. Опорная скорость является еще одним параметром калибровки, который зависит от диапазона скоростей частиц, который должен охватываться, чтобы дать возможность надежного определения плотности частиц посредством модуля лазерного датчика. Опорная скорость выбирается таким образом, что данная плотность частиц может быть определена надежным способом по предопределенному диапазону скоростей.
Первый измерительный луч предпочтительно образует первый угол β1 с опорной поверхностью, причем второй измерительный луч образует второй угол β2 с опорной поверхностью, при этом первая проекция первого измерительного луча на опорную поверхность и вторая проекция второго измерительного луча на опорную поверхность образуют угол γ между 20° и 160°, предпочтительно между 30° и 120° и наиболее предпочтительно между 80° и 100°.
Опорная поверхность или поверхность обнаружения может быть поверхностью устройства, содержащего модуль лазерного датчика. Первый и второй измерительные лучи излучаются через пропускающую область опорной поверхности (окно). Эта конфигурация особенно подходит для потоков частиц, которые параллельны опорной поверхности (см. фиг. 2). Такое устройство может быть стационарным устройством, таким как сенсорная камера, или мобильным устройством, таким как смартфон. Опорная поверхность может, например, представлять собой поверхность дисплея смартфона. Пользователь может держать смартфон или устройство мобильной связи таким образом, что поверхность дисплея параллельна или перпендикулярна к поверхности земли. Дополнительные датчики устройства могут помочь обеспечить правильное положение устройства по отношению к поверхности земли, и/или дополнительным данные скорости могут быть использованы для получения более оптимального измерения концентрации частиц (например, датчики ускорения и т.п., которые могут использоваться для компаса или применения выравнивания в смартфоне). Первый измерительный луч может в частном случае предпочтительно образовывать угол β1=45° с опорной поверхностью, при этом второй измерительный луч может предпочтительно образовывать угол β2=45° с опорной поверхностью. Проекции обоих измерительных лучей могут в этом случае предпочтительно образовывать угол γ=90°. Каждый вектор скорости потока частиц, параллельного опорной поверхности, образует в данном случае с первым или вторым измерительным лучом угол 90-α, равный 45°. Угол φ в данном случае равен 60°.
Оптический узел предпочтительно характеризуются первой и второй числовой апертурой между 0,01 и 0,06, предпочтительно между 0,02 и 0,04 по отношению к измерительным лучам, причем опорная скорость обнаруживаемых частиц меньше, чем 1 м/сек. Предопределенный диапазон скоростей может быть в диапазоне между 0,01 м/с и 7 м/с. Малая числовая апертура в комбинации с медленным движением частиц может обеспечить возможность надежного обнаружения частиц посредством портативного устройства, такого как устройство мобильной связи (например, смартфон). Кроме того, малая числовая апертура обеспечивает расстояние надежного обнаружения (первый и второй измерительный объем) между 3 и 10 мм до поверхности, например, смартфона, содержащего модуль лазерного датчика.
Опорная скорость может быть выбрана так, что сведение к минимуму ошибки в пределах заданного диапазона скоростей, содержащего опорную скорость, является симметричным относительно опорной скорости. Выбор опорной скорости, таким образом, может обеспечить улучшенную коррекцию ошибок, особенно в отношении скоростей на границе предопределенного диапазона скоростей. Риск увеличения систематической ошибки на верхней или нижней границе диапазона скоростей может снижаться.
Эксперименты показали, что скорость счета модуля лазерного датчика в зависимости от скорости частицы может в хорошем приближении быть описана посредством степенного закона. Поэтому опорная скорость, находясь на логарифмической оси вблизи или в середине диапазона скоростей, как представляется, является хорошим выбором для того, чтобы обеспечить возможность минимизации симметричной ошибки относительно опорной скорости в предопределенном диапазоне скоростей. Диапазон скорости может, например, быть ограничен 0,01 м/с и 6 м/с для определения плотности частиц посредством мобильных портативных устройств. Опорная скорость в этом случае может быть предпочтительно около 0,2 мс для числовой апертуры оптического узла, равной 0,03, чтобы определять надежное значение плотности частиц (например, РМ 2,5).
В зависимости от средней скорости модуля лазерного датчика относительно потока частиц может быть необходимым адаптировать числовую апертуру к предполагаемому применению. Модуль лазерного датчика, который преимущественно может быть использован на подвижном объекте со средней скоростью, например, 10 м/с, требует большей числовой апертуры, чтобы обеспечить возможность обнаружения меньших частиц при высокой скорости, в противном случае такие мелкие частицы не подсчитываются, увеличивая ошибку определения плотности частиц.
Первая числовая апертура может быть такой же, как вторая числовая апертура. Это не означает, что вариации исключены.
Значения скорости v можно определить посредством измеренных значений частоты f сигналов интерференции само-смешивания посредством формулы (уравнение 1):
v=f*λ/(2*sin(α)),
где λ представляет собой длину волны измерительного луча (например, 850 нм), и угол 90-α представляет собой угол, заключенный между вектором скорости и соответствующим измерительным лучом, который может (по меньшей мере приблизительно), определяться на основе первого и второго сигнала интерференции само-смешивания. В случае, когда поток частиц является параллельным поверхности обнаружения (например, поверхности мобильного телефона), и оба измерительных луча образуют угол 45° с поверхностью обнаружения, а проекции измерительных лучей на поверхность обнаружения образуют угол γ, равный 90°, угол 90-α составляет 45° (фиксированный). Даже в случае, когда поток не идеально параллелен, имеются только незначительные ошибки.
Определение скорости может быть улучшено путем адаптации анализа измеренных сигналов интерференции само-смешивания к эффективной длительности или времени измерения сигнала. Эффективная длительность сигнала зависит от скорости, размера луча и угла α. Эффективная длительность или время измерения могут быть определены путем обнаружения во временной области, что длительность сигнала выше определенного порогового значения.
Средние скорости vavi частиц относительно каждого измерительного луча i и общая средняя скорость vav в случае двух измерительных лучей задаются формулами (уравнение 6):
vav1=Σv(j)/N и vav2 =Σv(k)/M), vav=sqrt (vav12+vav22),
где v(j), v(k) являются скоростями, измеренными в первом и втором измерительном объеме, N является общим числом частиц, обнаруженных в первом измерительном объеме, и М представляет собой общее число частиц, обнаруженных во втором измерительном объеме в соответствующем интервале времени измерения. Уравнение для средней скорости может быть легко адаптировано в случае измерительных лучей, имеющих другой угол (в плоскости, параллельной к окну, иной, чем 90 градусов).
Блок оценки может быть дополнительно выполнен, чтобы корректировать определенную плотность частиц на коэффициент, содержащий кубический корень из отношения между опорной скоростью и определенной средней скоростью частиц.
Коэффициент, содержащий кубический корень из отношения между опорной скоростью и определенной средней скоростью частиц, используется для компенсации зависимости скорости от отсчетов частиц при заданной опорной плотности частиц, которая проявляет зависимость v1/3. Опорная скорость на самом деле выбирается таким образом, что эта зависимость скорости сведена к минимуму в пределах предопределенного диапазона скоростей.
Кроме того, первый измерительный объем может быть линейно вытянутым в направлении первого измерительного луча, а второй измерительный объем может быть линейно вытянутым в направлении второго измерительного луча. Блок оценки может в этом случае быть выполнен, чтобы определять первую относительную вероятность для обнаружения частиц в первом измерительном объеме. Блок оценки может быть дополнительно выполнен, чтобы определять вторую относительную вероятность для обнаружения частиц во втором измерительном объеме. Блок оценки может быть дополнительно выполнен, чтобы корректировать определенную плотность частиц посредством первой относительной вероятности и второй относительной вероятности.
Определение плотности частиц может быть дополнительно улучшено за счет допущения того, что малая числовая апертура имеет тот эффект, что измерительные объемы линейно вытянуты вдоль измерительного луча. Фокусировка посредством оптического узла с меньшей числовой апертурой расширяет диапазон вдоль измерительного луча, в котором частица может быть обнаружена. Вероятность того, что частица будет обнаружена первым или вторым измерительным лучом, является функцией угла движения воздуха по отношению к оптической оси соответствующего измерительного луча. Соответствующая вероятность может быть определена на основании вычисленных средних скоростей, измеренных в первом измерительном объеме и втором измерительном объеме, из-за по меньшей мере приблизительно определенного угла, заключенного между потоком частиц и обоими измерительными лучами. Определение этого угла в 3D-ситуации не является идеальным при использовании модуля лазерного датчика, содержащего только два лазеров. Однако оно позволяет определить плотность частиц с погрешностью менее 20%, что является достаточным для, например, портативного устройства мобильной связи, обеспечивающего индикацию того, является ли слишком высокой плотность частиц (например, смог), чтобы бегать трусцой на улице.
(Опциональная) коррекция может быть вычислена в случае модуля лазерного датчика с двумя измерительными лучами на основе определенных средних скоростей, приведенных выше, по следующей формуле (уравнение 3):

где р является вероятностью того, что частица будет обнаружена в первом измерительном объеме, и р2 - вероятностью того, что частица будет обнаружена во втором измерительном объеме.
Блок оценки может быть дополнительно выполнен, чтобы определять первую скорость счета частиц при первом пороговом уровне отношения сигнала к шуму и вторую скорость счета частиц при втором пороговом уровне отношения сигнала к шуму, отличном от первого порогового уровня отношения сигнала к шуму. Блок оценки дополнительно выполнен, чтобы корректировать определенную плотность частиц посредством первой скорости счета частиц и второй скорости счета частиц.
Эксперименты и вычисления на модели показали, что при более высоких скоростях отношение сигнал-шум для самых мелких частиц становится слишком низким, чтобы быть измеренным. Использование двух различных пороговых уровней для скорости счета частиц позволяет осуществлять оценку числа мелких частиц и, таким образом, оценку числа пропущенных частиц при более высоких скоростях. Плотность частиц может, например, быть скорректирована посредством формулы:

где ratiotwothrref представляет собой отношение двух пороговых значений (Nr отсчетов при высоком пороговом уровне, разделенное на число отсчетов при низком пороговом уровне) для крупных частиц и ratiotwothrav представляет собой отношение двух пороговых значений при средней скорости измерения плотности частиц (например, PM2,5). Отличием является мера для числа мелких частиц в распределении. Путем умножения разности на коэффициент, соответствующий мере разности скоростей относительно опорной скорости, выполняется коррекция для мелких частиц в распределении. Различные пороги могут быть сгенерированы посредством оптических мер (например, первой числовой апертуры, отличающейся от второй числовой апертуры), различных чувствительностей детекторов (либо физически, либо посредством различных чувствительностей, установленных блоком оценки) или, например, электронных фильтров, применимых к сигналу интерференции само-смешивания. Комбинация числа обнаруженных частиц и обнаруженных средних скоростей дает в результате плотность частиц. Плотность частиц может быть выражена, например, как значение РМ2,5. Блок оценки может, например, содержать одну ASIC, которая приспособлена для оценки сигналов интерференции само-смешивания, сгенерированных посредством первого, второго и, опционально, третьего лазера в комбинации с первым, вторым или третьим детектором. В качестве альтернативы, каждый детектор может быть связан с отдельной ASIC.
Значение РМ2,5 может быть вычислено по формуле (уравнение 4):

где с1 представляет собой еще один калибровочный коэффициент, и Т представляет собой предопределенный период времени. Калибровочный коэффициент с1 определяется на основе опорных экспериментов при помощи, например, профессионального оборудования и опорных концентраций частиц. Примером калибровочных коэффициентов, определенных калибровочными экспериментами, является с1=7,8, с2=2,7. Формула, приведенная выше, приводит к надежному обнаружению плотности частиц в диапазоне скоростей между 0,01 м/с и 7 м/с со стандартным отклонением около 0,2 по отношению к калибровочным экспериментам в том же диапазоне скоростей.
Оптический узел может быть выполнен, чтобы поворачивать первый измерительный луч таким образом, что высота компоновки перпендикулярно к окну выхода модуля лазерного датчика меньше, чем 1 мм.
Оптический узел может, например, содержать две отражающих поверхности, которые расположены таким образом, что первый измерительный луч поворачивается внутри модуля лазерного датчика перед пересечением, например, линзы, фокусирующей первый измерительный луч в первый измерительный объем. Требуемая числовая апертура, обеспечиваемая посредством оптического узла в комбинации с положением фокуса достаточно далеко (например, 5 мм) от устройства, требует определенного расстояния между лазером и фокусирующим оптическим устройством (например, линзой). Высота компоновки модуля лазерного датчика может быть уменьшена, если оптический путь первого измерительного луча поворачивается внутри модуля лазерного датчика. Уменьшенная высота компоновки модуля лазерного датчика может быть особенно предпочтительной, если модуль лазерного датчика скомпонован в устройстве мобильной связи, таком как смартфон.
Оптический узел может быть выполнен таким образом, что первый измерительный объем расположен на расстоянии от 3 мм до 10 мм, перпендикулярно к окну выхода модуля лазерного датчика. Окно выхода может быть идентичным с оптическим фокусирующим устройством для фокусировки первого измерительного луча в первый измерительный объем. Расстояние от 3 мм до 10 мм уменьшает влияние поверхности выходного окна, которое может быть интегрировано в поверхности устройства по отношению к потоку частиц. Большее расстояние до первого измерительного объема приводит в результате к более низким воздушным скоростям в случае практических схем воздушного потока за счет тепла от руки и/или устройства в вертикальном положении.
Модуль лазерного датчика предпочтительно содержит по меньшей мере третий лазер, выполненный, чтобы излучать третий измерительный луч. Оптический узел выполнен с возможностью фокусировки третьего измерительного луча в третий измерительный объем. Первый измерительный луч, второй измерительный луч и третий измерительный луч взаимно заключают угол от 10° до 110° (предпочтительно 90°). Модуль лазерного датчика дополнительно содержит третий детектор, выполненный, чтобы определять третий сигнал интерференции или третий сигнал интерференции само-смешивания третьей оптической волны в пределах третьего лазерного резонатора третьего лазера. Блок оценки дополнительно выполнен, чтобы принимать сигнал обнаружения, генерируемый третьим детектором. Блок оценки дополнительно выполнен, чтобы определять третью среднюю скорость частиц, обнаруженных третьим детектором в течение предопределенного периода времени. Блок оценки дополнительно выполнен, чтобы определять третье число частиц посредством сигналов обнаружения, генерируемых третьим детектором в течение предопределенного периода времени. Блок оценки дополнительно выполнен, чтобы определять плотность частиц на основе средней скорости частиц, определенной посредством первой средней скорости, второй средней скорости и третьей средней скорости и первого числа частиц, второго числа частиц и третьего числа частиц.
Третий лазер обеспечивает улучшенное определение направления потока частиц, так как все три компонента скорости могут быть измерены. Поэтому определение средней скорости может быть улучшено. Кроме того, дополнительный измерительный объем добавляется, так что скорость счета частиц увеличивается. Дополнительные лазеры и детекторы могут быть добавлены для повышения надежности (резервный лазер).
Первый измерительный объем может по меньшей мере частично перекрываться со вторым измерительным объемом или даже третьим измерительным объемом. Перекрытие измерительных объемов может иметь преимущество, состоящее в том, что та же самая частица может быть использована для определения вектора скорости для скорости частиц. Таким образом, точность измерения средней скорости и угла между измерительными лучами и потоком частиц может быть улучшена. Размер модуля лазерного датчика может увеличиться из-за расстояния между лазерами, которое необходимо для обеспечения возможности перекрытия измерительных объемов.
В качестве альтернативы, первый измерительный объем может отличаться от второго измерительного объема и, в случае модуля лазерного датчика с тремя измерительными лучами, также отличаться от третьего измерительного объема. Измерительные лучи могут в этом случае излучаться почти с той же самой позиции. Это позволяет получить очень компактный модуль лазерного датчика, в котором все два или три лазера расположены очень близко друг к другу.
Такая конфигурация может быть особенно полезной в случае интегрированных лазерных конфигураций, в которых первый лазер и второй лазер (и, опционально, третий лазер) содержат полупроводниковые слои, предусмотренные на одном полупроводниковом чипе. Электрические контакты слоев должны быть расположены таким образом, что возможно независимое измерение первого, второго и, опционально, третьего сигнала интерференции само-смешивания.
Модуль лазерного датчика может дополнительно содержать электрический возбудитель (драйвер). Электрический драйвер может быть выполнен, чтобы электрически возбуждать лазер или лазеры, так что лазеры испускают измерительные лучи.
Модуль лазерного датчика может дополнительно содержать интерфейс, посредством которого может производиться обмен управляющими сигналами, электрическими сигналами возбуждения или сигналами обнаружения с внешним контроллером.
Модуль лазерного датчика в соответствии с любым вариантом осуществления, описанным выше, может быть выполнен, чтобы определять плотность частиц в первом режиме. Модуль лазерного датчика может быть дополнительно выполнен, чтобы обнаруживать близость объекта с размером по меньшей мере 1 мм во втором режиме. Когда модуль лазерного датчика используется для определения плотности частиц, предпочтительно используется DC ток возбуждения, и частицы обнаруживаются посредством модуляций в сигнале интерференции само-смешивания, как описано выше.
Модуль лазерного датчика может, в соответствии с альтернативным вариантом осуществления, быть выполнен, чтобы обнаруживать плотность частиц для частиц с размером частиц менее 20 мкм. Модуль лазерного датчика может быть дополнительно выполнен, чтобы обнаруживать присутствие объекта в пределах предопределенного диапазона обнаружения от поверхности испускания света модуля лазерного датчика, причем размер объекта составляет предпочтительно по меньшей мере 1 мм вдоль наиболее длинной протяженности. Модуль лазерного датчика содержит
- по меньшей мере первый лазер, выполненный, чтобы излучать первый измерительный луч,
- оптический узел, выполненный, чтобы фокусировать первый измерительный луч в первый измерительный объем, причем оптический узел характеризуются первой числовой апертурой относительно первого измерительного луча между 0,02 и 0,1,
- по меньшей мере первый детектор, выполненный, чтобы определять первый сигнал интерференции или сигнал интерференции само-смешивания,
- блок оценки, причем блок оценки выполнен, чтобы принимать первые сигналы обнаружения, сгенерированные по меньшей мере первым детектором в ответ на определенный первый сигнал интерференции или сигнал интерференции само-смешивания, причем блок оценки дополнительно выполнен, чтобы различать посредством первого сигнала обнаружения между присутствием объекта в пределах предопределенного диапазона обнаружения и присутствием частиц в первом измерительном объеме.
Объект может, например, представлять собой палец или часть руки пользователя для управления жестами или, альтернативно, частицу грязи, препятствующую или снижающую надежное определение плотности частиц.
Модуль лазерного датчика или датчик частиц в приложении смартфона должен иметь хорошую скорость счета частиц и малый минимально обнаруживаемый размер частиц при низких скоростях, как правило, например, 0,2 м/с. Для обеспечения этого, числовая апертура (NA) системы должна быть выбрана относительно малой, например, NA=0,03. Эта малая NA выгодна, чтобы быть в состоянии обнаруживать крупные объекты на относительно больших расстояниях. Например, сфокусированное пятно для обнаружения частиц, как правило, будет выбрано на 5 мм от покровного стекла смартфона. Для системы NA=0,03, большие объекты все еще можно наблюдать посредством сигнала интерференции или сигнала интерференции само-смешивания (SMI) на расстоянии, например, 15 см. Фактические расстояния зависят, помимо NA, также от выбора других параметров системы (например, мощности и свойств отражения объекта).
Эксперименты показали, что возможны одноосные датчики частиц, использующие алгоритм времени перехода для определения скорости частиц. Кроме того, 2- или 3-осная система не должна быть ортогональной для точных результатов обнаружения частиц. Это означает, что эти датчики частиц могут использовать относительно малые углы луча (в диапазоне от 10 до 35 град) по отношению к нормали к поверхности смартфона. Это является благоприятным признаком для обнаружения близости.
Для обнаружения частиц требуется определенная минимальная NA, в то время как для обнаружения близости требуется определенная максимальная NA. Это дает представление о том, что для комбинированного модуля лазерного датчика NA должна выбираться в определенном диапазоне. Определенный диапазон находится в пределах от 0,02 до 0,1, чтобы обеспечивать возможность надежного определения плотности частиц и обнаружения близости для скоростей частиц или скорости ветра до 6 м/с.
Когда тот же самый модуль лазерного датчика используется для управления жестами и/или обнаружения близости, используется модулированный ток возбуждения, так что расстояние (и/или скорость) объекта могут быть определены. Управление жестом означает, что пользователь может вводить информацию или манипулировать информацией без физического контакта с поверхностью модуля лазерного датчика или устройства (например, смартфона), содержащего модуль лазерного датчика. Таким образом, управление жестом позволяет осуществлять бесконтактный ввод или манипулирование информацией или представление информации.
Грубый способ обнаружения близости может быть осуществлен путем наблюдения числа обнаруженных событий недочетов (дислокаций) частиц. В этом случае нет необходимости обеспечивать модулированный ток возбуждения.
Предопределенный диапазон обнаружения такого модуля лазерного датчика, который выполнен, чтобы определять плотность частиц и присутствие объекта, может быть меньше, чем 20 см. Первый измерительный объем расположен между поверхностью испускания света и предопределенным диапазоном обнаружения.
Модуль лазерного датчика выполнен, чтобы определять плотность частиц и присутствие объекта, причем модуль лазерного датчика может дополнительно содержать электрический драйвер. Электрический драйвер выполнен, чтобы электрически возбуждать первый лазер в течение первого периода времени, посредством первого электрического тока возбуждения. Электрический драйвер дополнительно выполнен, чтобы электрически возбуждать первый лазер в течение второго периода времени, отличного от первого периода времени, посредством второго электрического тока возбуждения, отличного от первого электрического тока возбуждения. Блок оценки выполнен, чтобы обнаруживать присутствие объекта в пределах предопределенного диапазона обнаружения в течение первого периода времени. Блок оценки дополнительно выполнен, чтобы обнаруживать присутствие частиц в течение второго периода времени. Первый электрический ток возбуждения может, например, представлять собой модулированный ток возбуждения (например, треугольной формы). Второй электрический ток возбуждения может, например, представлять собой постоянный ток (DC).
Модуль лазерного датчика выполнен, чтобы определять плотность частиц и присутствие объекта, причем блок оценки выполнен, чтобы обнаруживать близость объекта в пределах предопределенного диапазона обнаружения для распознавания жестов в течение первого периода времени. Блок оценки дополнительно выполнен, чтобы определять плотность частиц во втором периоде времени. Блок оценки может быть выполнен, чтобы обнаруживать движение объекта в течение первого периода времени.
Модуль лазерного датчика выполнен, чтобы определять плотность частиц и присутствие объекта, причем блок оценки дополнительно выполнен, чтобы определять среднее время перехода частиц, проходящих первый измерительный объем в течение предопределенного периода времени, на основе длительности первых сигналов интерференции или интерференции само-смешивания, генерируемых частицами. Блок оценки дополнительно выполнен, чтобы определять число частиц на основе первых сигналов интерференции или интерференции само-смешивания в течение предопределенного периода времени, и причем блок оценки дополнительно выполнен, чтобы определять плотность частиц на основе среднего времени перехода и числа частиц, как описано выше и ниже.
Модуль лазерного датчика, описанный выше, позволяет обнаруживать частицы без обеспечения предопределенного направления потока частиц и скорости. Только один лазер (и соответствующий детектор), излучающий измерительный луч только в одном направлении, может быть использован для генерирования первых сигналов интерференции или сигналов интерференции само-смешивания на основе частиц, проходящих первый измерительный объем в течение предопределенного периода времени. Сигналы интерференции или сигналы интерференции само-смешивания используются для определения числа частиц и среднего времени перехода частиц, проходящих первый измерительный объем в течение предопределенного периода времени. Время перехода каждой отдельной частицы является разницей во времени между началом сигнала интерференции или сигналов интерференции само-смешивания, генерируемых соответствующей частицей, и концом сигнала интерференции или сигналов интерференции само-смешивания, генерируемых соответствующей частицей. Среднее время перехода представляет собой среднее значение всех времен перехода, измеренных в пределах предопределенного времени. Некоторые пороги могут быть определены, чтобы выбрать сигналы интерференции или сигналы интерференции само-смешивания, которые могут улучшить определение среднего времени перехода. Например, можно выбрать только такие сигналы интерференции или сигналы интерференции само-смешивания с максимальной амплитудой сигнала выше предопределенного порогового значения амплитуды. Предопределенное пороговое значение амплитуды может обеспечить возможность выбора таких сигналов интерференции или сигналов интерференции само-смешивания, вызванных частицами, проходящими центральную линию измерительного объема вдоль направления измерительного луча. Кроме того, по существу, круглая форма частиц и первый измерительный луч вызывает то, что время перехода как функция смещенного от центра расстояния уменьшается только постепенно, так что определение времени перехода не чувствительно по отношению к траектории частицы через первый измерительный объем. Среднее время перехода и число частиц, определяемое посредством сигналов интерференции или сигналов интерференции само-смешивания в случае приблизительно известного соотношения между вектором скорости потока частиц с направлением первого измерительного пучка, достаточны для определения плотности частиц.
Модуль лазерного датчика выполнен, чтобы определять плотность частиц и присутствие объекта, причем блок оценки дополнительно выполнен, чтобы определять угол, заключенный между первым измерительным лучом и вектором скорости частиц, на основе первого сигнала интерференции или сигналов интерференции само-смешивания и среднего времени перехода, и причем числовая апертура выполнена, чтобы обнаруживать предопределенный минимальный размер частиц при опорной скорости. Опорная скорость выбирается в пределах предопределенного диапазона скоростей между 0,01 м/с и 7 м/с. Плотность частиц дополнительно определяется на основе опорной скорости и диаметра опорного луча первого измерительного луча. Опорная скорость и диаметр опорного луча определяют опорное время, в которое опорная частица с размером опорной частицы проходит первый измерительный луч. Вектор скорости опорной частицы перпендикулярен первому измерительному лучу. Дальнейшие подробности представлены в вариантах осуществления, описанных выше и ниже.
Модуль лазерного датчика выполнен, чтобы определять плотность частиц и присутствие объекта, причем модуль лазерного датчика содержит:
- по меньшей мере второй лазер, выполненный, чтобы излучать второй измерительный луч,
- оптический узел дополнительно выполнен, чтобы фокусировать по меньшей мере второй измерительный луч во второй измерительный объем, причем оптический узел характеризуются первой числовой апертурой относительно второго измерительного луча, и причем первый измерительный луч и второй измерительный луч взаимно образуют угол между 5° и 70°, более предпочтительно между 7° и 50° и наиболее предпочтительно между 10° и 35°,
- по меньшей мере второй детектор, выполненный, чтобы определять второй сигнал интерференции или сигналы интерференции само-смешивания,
- блок оценки дополнительно выполнен, чтобы принимать вторые сигналы обнаружения, генерируемые вторым детектором в ответ на определенные вторые сигналы интерференции или сигналы интерференции само-смешивания, причем блок оценки дополнительно выполнен, чтобы определять плотность частиц на основе первых сигналов детектора и вторых сигналов обнаружения.
Два лазера и соответствующие детекторы могут быть использованы в случае двумерного воздушного или газового (или в более общем случае флюидного) потока, чтобы определять среднюю скорость частиц для определения плотности частиц. Три лазера и соответствующие детекторы необходимы в случае неизвестного направления трехмерного потока, чтобы определять среднюю скорость частиц для определения плотности частиц.
Модуль датчика лазера выполнен, чтобы определять плотность частиц и присутствие объекта, причем объект является блокирующим объектом, мешающим обнаружению частиц. Блок оценки выполнен, чтобы адаптировать обнаружение плотности частиц в зависимости от блокирующего объекта.
Модуль лазерного датчика будет обрабатывать отраженный световой сигнал (на основе интерференции или интерференции само- смешивания SMI), чтобы определять отсчет частиц в объеме обнаружения. Сигнал будет неточным в случае, если:
1. Окно модуля лазерного датчика полностью блокируется (т.е. свет не может выйти из модуля датчика)
а. Свет блокируется, прежде чем частицы могут быть обнаружены
б. Свет блокируется/отражается блокирующим объектом после фокусировки луча, частицы все еще могут пройти луч обнаружения
2. Световой путь одного из измерительных лучей частично блокируется
а. большими частицами на окне
b. объектом в лазерном луче
Во всех случаях датчик даст неточные результаты на основе обработки принимаемого сигнала.
Модуль лазерного датчика обнаруживает присутствие чего-то, блокирующего путь света (полностью или частично), и поэтому не сообщает отсчеты частиц в течение этого времени. Обнаружение может быть основано на структуре отраженного света. В частности:
Полная блокировка (1а): Сигнал интерференции или сигнал интерференции само-смешивания является результатом эффективного размещения объекта в интерферометре. Как правило, объект будет подвижным, что приводит к более высоким или низким частотам в зависимости от скорости движения объекта по отношению к оптической оси луча обнаружения. Комбинация амплитуды, временной длительности, минимального уровня шума и частоты этих сигналов будет отличаться от сигналов частиц, и эти характеристики могут быть использованы, чтобы отличить частицу от блокированного датчика. Это также справедливо для постоянно блокированного датчика (например, измерения, в то время как модуль лазерного датчика блокирован, например, крышкой смартфона или положен в карман) или для ситуации, когда датчик блокирован кратковременно (например, когда рука проходит мимо датчика).
В случае, когда объект блокировки находится после объема обнаружения (1b), могут возникнуть две ситуации, одна подобна предыдущей, когда фоновый объект приводит к возникновению сигналов, которые доминируют над сигналами частиц, и должны обрабатываться, как указано выше. Это, однако, может также привести к изменению фонового шума, в случае, если влияние объекта является достаточно слабым (т.е. на расстоянии, удаленном (обычно несколько см) от датчика). Это может быть идентифицировано посредством изменяющегося во времени фонового шума или спектрального изменения шума.
В случае частичного блокирования (2b), блок оценки модуля лазерного датчика может быть выполнен с возможностью вычитания влияния блокирования объекта, чтобы обеспечить результат для счета частиц следующим образом: в части сигнала интерференции или сигнала интерференции само-смешивания (как функции времени), вариации сигнала будут значительно выше (из-за блокирующего объекта, чтобы ввести высокий сигнальный компонент, скрывающий любое движение частиц). Информация концентрации частиц все еще может быть выведена из оставшегося сигнала с пониженной точностью.
Другой вариант для обнаружения частичного блокирования (2b) датчика может состоять в применении модулированного измерительного луча. В этом случае могут быть получены расстояние и скорость объекта. Расстояние может, например, соответствовать таковому с возмущением, обусловленным покровным стеклом (вероятно, для крупных частиц), может быть предоставлена рекомендация по очистке.
Модуль лазерного датчика может быть выполнен, чтобы определять сигналы интерференции вместо определения сигналов интерференции само-смешивания. Модуль лазерного датчика может в этом случае быть выполнен, чтобы обеспечивать первый опорный луч на основе первого измерительного луча посредством частичного отражения первого измерительного луча и второго опорного луча посредством частичного отражения второго измерительного луча. Первый или второй измерительный луч может частично отражаться посредством оптической структуры, расположенной на оптическом пути первого измерительного или второго измерительного луча внутри модуля лазерного датчика. Первый детектор выполнен, чтобы определять первый сигнал интерференции на основе интерференции отраженного света первого измерительного луча и первого опорного луча. Второй детектор выполнен, чтобы определять второй сигнал интерференции на основе интерференции отраженного света второго измерительного луча и второго опорного луча.
Модуль лазерного датчика, который выполнен, чтобы определять сигналы интерференции вместо определения сигналов интерференции само-смешивания, может альтернативно или дополнительно быть выполнен таким образом, что первый детектор отделен от первого лазера. Второй детектор отделен от второго лазера. Модуль лазерного датчика дополнительно содержит в этом случае первый делитель луча, выполненный, чтобы обеспечивать первый опорный луч, и причем модуль лазерного датчика дополнительно содержит второй делитель луча, выполненный, чтобы обеспечивать второй опорный луч. Первый и второй делители луча могут быть первым и вторым поляризационными делителями луча. Модуль лазерного датчика может дополнительно содержать первую четвертьволновую пластину, расположенную между первым делителем луча и первым фокусирующим устройством для фокусировки первого измерительного луча в первый измерительный объем. Модуль лазерного датчика может дополнительно содержать вторую четвертьволновую пластину, расположенную между вторым делителем луча и вторым фокусирующим устройством для фокусировки первого измерительного луча в первый измерительный объем.
Очиститель воздуха, вытяжной колпак, автомобиль, корпус датчика или носимое устройство, подобно устройству мобильной связи могут содержать модуль лазерного датчика в соответствии с любым вариантом осуществления, как описано выше.
В соответствии с еще одним аспектом, представлен способ определения плотности частиц. Способ включает в себя этапы:
излучения по меньшей мере первого измерительного луча посредством первого лазера,
излучения по меньшей мере второго измерительного луч посредством второго лазера,
фокусировки первого измерительного луча с первой числовой апертурой, причем первая числовая апертура выполнена, чтобы обнаруживать предопределенный минимальный размер частиц при опорной скорости, причем опорная скорость находится в пределах предопределенного диапазона скоростей,
фокусировки второго измерительного луча со второй числовой апертурой, причем вторая числовая апертура выполнена, чтобы обнаруживать предопределенный минимальный размер частиц при опорной скорости, причем опорная скорость находится в пределах предопределенного диапазона скоростей,
определения первого сигнал интерференции или сигнала интерференции само-смешивания первой оптической волны в пределах первого лазерного резонатора первого лазера,
определения второго сигнал интерференции или сигнала интерференции само-смешивания второй оптической волны в пределах второго лазерного резонатора второго лазера,
определения первой средней скорости на основе первого сигнала интерференции, определенного в предопределенный период времени,
определения второй средней скорости на основе второго сигнала интерференции или сигнала интерференции само-смешивания, определенного в предопределенном периоде времени,
определения первого числа частиц посредством первых сигналов интерференции или сигналов интерференции само-смешивания, определенных в предопределенном периоде времени,
определения второго числа частиц посредством вторых сигналов интерференции или сигналов интерференции само-смешивания, определенных в предопределенном периоде времени,
определения средней скорости частиц на основе по меньшей мере первой средней скорости и второй средней скорости,
определения плотности частиц на основе по меньшей мере определенной средней скорости, первого числа частиц и второго числа частиц.
В соответствии с альтернативным вариантом осуществления обеспечен способ определения плотности частиц для частиц с размером частиц менее 20 мкм. Способ содержит этапы:
- излучения по меньшей мере первого измерительного луча посредством первого лазера,
- фокусировки первого измерительного луча с первой числовой апертурой между 0,02 и 0,1,
- определения первого сигнала интерференции или сигнала интерференции само-смешивания,
- различения между присутствием объекта в пределах предопределенного диапазона обнаружения и присутствием частиц в первом измерительном объеме, причем размер объекта предпочтительно составляет по меньшей мере 0,5 мм, более предпочтительно по меньшей мере 1 мм вдоль наиболее длинной протяженности.
В соответствии с еще одним аспектом обеспечен компьютерный программный продукт. Компьютерный программный продукт содержит средство кода, которое может быть сохранено на по меньшей мере одном устройстве памяти модуля лазерного датчика или по меньшей мере одном устройстве памяти устройства, содержащего модуль лазерного датчика. Средство кода выполнено таким образом, что способы, описанные выше, могут выполняться посредством по меньшей мере одного устройства обработки модуля лазерного датчика или посредством по меньшей мере одного устройства обработки устройства, содержащего модуль лазерного датчика.
Устройство памяти или устройство обработки может содержаться в лазерном датчике (например, электрическом драйвере, блоке оценки и т.д.) или устройстве, содержащем модуль лазерного датчика. Первое устройство памяти и/или первое устройство обработки устройства, содержащего модуль лазерного датчика, может взаимодействовать со вторым устройством памяти и/или вторым устройством обработки, содержащимся в модуле лазерного датчика.
Устройство или устройства памяти могут быть любым физическим устройством, выполненным, чтобы хранить информацию, в частности, цифровую информацию. Устройство памяти может быть, в частности, выбрано из группы твердотельной памяти или оптической памяти.
Устройство или устройства обработки могут быть любым физическим устройством, выполненным, чтобы выполнять обработку данных, в частности, обработку цифровых данных. Устройство обработки может быть, в частности, выбрано из группы процессора, микропроцессора или специализированной интегральной схемы (ASIC).
Следует понимать, что модуль лазерного датчика по любому одному из пп. 1-12 и способа по п. 14 имеют сходные и/или идентичные варианты осуществления, в частности, как это определенно в зависимых пунктах формулы изобретения.
Следует понимать, что предпочтительный вариант осуществления настоящего изобретения также может представлять собой любую комбинацию зависимых пунктов формулы изобретения с соответствующим независимым пунктом формулой изобретения.
Другие предпочтительные варианты осуществления изобретения определены ниже.
Эти и другие аспекты настоящего изобретения будут очевидны и объяснены со ссылкой на варианты осуществления, описанные ниже.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На чертежах:
Фиг. 1 показывает схематичное представление первого модуля лазерного датчика;
Фиг. 2 показывает схематичное представление вида в перспективе измерительных лучей;
Фиг. 3 показывает схематичное представление различных распределений частиц;
Фиг. 4 показывает отсчеты частиц в зависимости от диаметра частиц при различных скоростях частиц;
Фиг. 5 показывает отсчеты частиц как функцию скорости для различных распределений частиц;
Фиг. 6 показывает скорректированные отсчеты частиц в зависимости от скорости для различных распределений частиц;
Фиг. 7 показывает соотношение отсчетов частиц при различных пороговых уровнях отношения сигнала к шуму как функцию диаметра частиц для различных скоростей частиц;
Фиг. 8 показывает отсчеты частиц, скорректированные для малых частиц;
Фиг. 9 показывает результаты измерения;
Фиг. 10 показывает схематичное представление второго модуля лазерного датчика;
Фиг. 11 показывает расстояние обнаружения как функцию числовой апертуры;
Фиг. 12 показывает минимально обнаруживаемый размер частиц как функцию числовой апертуры;
Фиг. 13 показывает схематичное представление модуля третьего лазерного датчика;
Фиг. 14 показывает схематичное представление вида сверху четвертого модуля лазерного датчика;
Фиг. 15 показывает схематичное представление первого микро-оптического элемента;
Фиг. 16 показывает схематичное представление первого оптического узла;
Фиг. 17 показывает схематичное представление второго оптического узла;
Фиг. 18 показывает схематичное представление устройства мобильной связи;
Фиг. 19 показывает схематичное представление способа определения плотности частиц.
На чертежах одинаковые позиции относятся к подобным объектам. Объекты в чертежах не обязательно вычерчены в масштабе.
Подробное описание вариантов осуществления
Различные варианты осуществления настоящего изобретения будут теперь описаны с помощью фигур чертежей.
Интерференция само-смешивания (интерференция биений, автодинная интерференция) используется для обнаружения перемещения и расстояния до объекта. Информация предшествующего уровня техники об интерференции само-смешивания описана в публикации ʺLaser diode self-mixing technique for sensing applicationsʺ, Giuliani, G.; Norgia, M.; Donati, S. & Bosch, T., Laser diode self-mixing technique for sensing applications, Journal of Optics A: Pure and Applied Optics, 2002, 4, S. 283 - S. 294, которая включена посредством ссылки. Обнаружение движения кончика пальца относительно датчика в устройстве оптического ввода подробно описано в международной патентной заявке WO 02/37410, которая включена посредством ссылки. Принцип интерференции само-смешивания обсуждается на основе примеров, представленных в международной патентной заявке WO 02/37410. Диодный лазер, имеющий резонатор лазера, предусмотрен для излучения лазерного, или измерительного, луча. На своей верхней стороне, устройство снабжено прозрачным окном, по которому перемещается объект, например, человеческий палец. Линза расположена между диодным лазером и окном. Эта линза фокусирует лазерный луч на или вблизи верхней стороны прозрачного окна. Если объект присутствует в этом положении, он рассеивает измерительный луч. Часть излучения измерительного луча рассеивается в направлении луча подсветки, и эта часть конвергируется линзой на излучающей поверхности лазерного диода и повторно входит в резонатор этого лазера. Излучение, повторно входящее в резонатор диодного лазера, вызывает изменение в усилении лазера и, таким образом, в интенсивности излучения, испускаемого лазером, и именно это представляет собой явление, которое называется эффектом само-смешивания в диодном лазере.
Изменение в интенсивности излучения лазером или оптической волны в резонаторе лазера может быть обнаружено посредством фотодиода или детектора, выполненного, чтобы определять изменение импеданса в резонаторе лазера. Диод или детектор импеданса преобразует изменение излучения в электрический сигнал, и предусмотрена электронная схема для обработки этого электрического сигнала.
Сигнал интерференции само-смешивания, в случае обнаружения частиц, может быть охарактеризован, например, коротким импульсом сигнала или несколькими импульсами сигнала. Доплеровская частота, наблюдаемая в этих сигналах, является мерой скорости частиц вдоль оптической оси. Поэтому может быть предпочтительным использовать DC ток возбуждения, чтобы упростить обнаружение сигнала и анализ сигнала. Длительность и интенсивность сигнала, опционально, могут быть использованы для определения размера частиц. Модулированный ток возбуждения может быть использован для того, чтобы определять положение или скорость частицы, например, посредством сигналов интерференции само-смешивания, которые могут генерироваться за счет отражения лазерного света на более крупных частицах или мешающих объектах. Расстояние (и, опционально, скорость) могут быть определены в одном измерении или на последующем этапе измерения. Поэтому может оказаться возможным или даже полезным использовать DC ток возбуждения в первый период времени, чтобы генерировать измерение частиц предполагаемого числа частиц, скорость и модулированный ток возбуждения, чтобы определять ложные объекты в луче.
Кроме того, можно применять тот же самый модуль лазерного датчика, используемый для зондирования частиц, в качестве датчика близости и/или датчика для управления жестом путем изменения режима работы. Когда модуль лазерного датчика применяется для обнаружения частиц, предпочтительно используется DC ток возбуждения, и частицы обнаруживаются посредством модуляций в сигнале интерференции само-смешивания. Когда тот же самый модуль лазерного датчика применяется для управления жестами и/или восприятия близости, используется модулированный ток возбуждения, и может определяться расстояние (и/или скорость) объекта. Определенное таким образом расстояние может использоваться как датчик близости, например, для измерения расстояния от головы до смартфона. В качестве альтернативы, это измеренное расстояние может использоваться для управления жестами, например, увеличения и уменьшения масштаба фотоснимка путем изменения расстояние от пальца до датчика. Установлено, что оптимально низкие значения NA (числовой апертуры), необходимые для обнаружения частиц при низких скоростях, очень полезны для реализации обнаружения близости и жеста для требуемых диапазонов расстояния. Например, система NA=0,03 позволяет осуществлять определение расстояния до 5 см.
Фиг. 1 показывает схематичное представление первого модуля 100 лазерного датчика. Модуль лазерного датчика содержит два поверхностно-излучающих лазера с вертикальным резонатором (VCSEL) 111, 112. Оптический узел 150 содержит в этом случае две отдельных линзы, каждая с числовой апертурой 0,045. Первый лазер 111 и второй лазер 112 расположены так, что направления векторов в направлениях излучения измерительных лучей 111', 112' образуют угол 90°. Измерительные лучи 111', 112' могут быть расположены в одной и той же плоскости или параллельных плоскостях, охватываемых векторами направления. Например, оба лазерных луча могут исходить из различных позиций в устройстве и фокусироваться примерно в том же самом положении. В другом примере, оба лазерных луча исходят из позиций на коротком расстоянии друг от друга в устройстве и фокусируются в различных местоположениях для зондирования частиц. Первый лазер 111 связан с первым детектором 121 (например, интегрированным фотодиодом), так что может детектироваться первый сигнал интерференции само-смешивания в лазерном резонаторе первого лазера 111. Второй лазер 111 связан со вторым детектором 122 (например, интегрированным фотодиодом), так что может детектироваться первый сигнал интерференции само-смешивания в лазерном резонаторе второго лазера 112. Обнаруженные сигналы интерференции само-смешивания оцениваются посредством блока 140 оценки, который электрически соединен с первым детектором 121 и вторым детектором 122. Стрелка указывает направление потока частиц. Модуль лазерного датчика может дополнительно содержать первый интерфейс (не показан), который выполнен, чтобы принимать электрическую энергию и управляющие сигналы для приведения в действие первого лазера 111 и второго лазера 112. Кроме того, может иметься второй интерфейс, который выполнен, чтобы передавать оцененные сигналы интерференции само-смешивания и/или определенную плотность частиц на внешнее устройство обработки для дальнейшей обработки данных.
Фиг. 2 показывает схематичное представление вида в перспективе первого измерительного луча 111' и второго измерительного луча 112' над опорной поверхностью 102. Эта конфигурация может особенно подходить для модуля 100 лазерного датчика, выполненного, чтобы определять плотность частиц потока частиц, параллельного к опорной поверхности 102. Опорная поверхность 102 может представлять собой поверхность модуля 100 лазерного датчика или часть поверхности устройства, содержащего модуль 100 лазерного датчика. Первый и второй измерительный луч 111', 112' излучаются через (прозрачную) опорную поверхность 102, и оба измерительных луча образуют угол φ (не показан). Первый измерительный луч 111' образует угол β1 с опорной поверхностью 102, и второй измерительный луч 112' образует угол β2 с опорной поверхностью 102. Первая проекция 111" первого измерительного луча 111' на опорной поверхности 102 и вторая проекция 112" второго измерительного луча 112' на опорной поверхности 102 образуют угол γ. Поток частиц, параллельный к опорной поверхности 102, указан стрелкой, образующей угол 90-α со вторым измерительным лучом 112'.
Фиг. 3 показывает схематичное представление различных распределений частиц в зависимости от размера частиц [мкм] (абсцисса 10). Ордината 5 показывает число частиц на кубический метр в выбранном интервале (бине) 0,1 мкм. Число частиц как функция диаметра частиц может быть разделено на бины 0,1 мкм. Точка 0,5 мкм на графике показывает число частиц между 0,45 и 0,55 мкм. Распределение 11 частиц показывает плоское опорное распределение частиц с постоянной концентрацией частиц во всех бинах. Распределение 12 частиц показывает типичное распределение частиц в воздухе. В общем случае, частицы в воздухе являются очень мелкими частицами, состоящими из твердого или жидкого материала, которые могут оставаться взвешенными в воздухе и распространяться ветром. Распределение 13 частиц получено для курения благовоний (ладана). Распределение частиц 14 соответствует среднему распределению частиц смога в Шанхае. Различные распределения частиц показывают, что для распределения частиц в загрязненном воздухе, в основном, преобладают мелкие частицы с размером частиц менее 0,5 мкм. Кроме того, число частиц с заданным размером частиц зависит от источника загрязнения частицами. Поэтому не имеется опорного распределения частиц. Надежное измерение плотности частиц должно, следовательно, по меньшей мере в определенных пределах, принимать во внимание различные распределения частиц.
Фиг. 4 показывает отсчеты частиц [отсчеты/(минута*мкг/м3)] (ордината 20) в зависимости от диаметра частиц (абсцисса 10) при различных скоростях частиц. Линия 21 показывает отсчеты частиц при первой скорости 0,05 м/с. Линия 22 показывает отсчеты частиц при второй скорости 0,6 мс, и линия 23 показывает отсчеты частиц при третьей скорости 7 м/с. Отсчеты частиц или скоростей отсчета определяются посредством модуля лазерного датчика с числовой апертурой 0,045, которая рассчитана на опорную скорость 0,6 м/с. Для модели использовалось обнаружение максимального правдоподобия и распределения частиц ладана (много очень мелких частиц), смога в Шанхае и частиц в воздухе (много крупных частиц) (см. фиг. 3). Скорость отсчета частиц или скорость отсчета в основном пропорциональны v1/3 для частиц с размером частиц больше 0,5 мкм. Частицы с размером меньше 0,3 мкм не обнаруживаются при высоких скоростях. Фиг. 3 показывает соответствующие отсчеты 20 частиц как функцию скорости 30 для различных распределений 12, 13, 14 частиц, как описано со ссылкой на фиг. 3. Фиг. 6 показывает скорректированные отсчеты 20 частиц как функцию скорости 30 для различных распределений частиц. Отсчеты частиц были скорректированы посредством зависимости v1/3 скорости с использованием коэффициента коррекции (vref/vav)1/3, причем опорная скорость vref составляет 0,6 м/с как уже упоминалось выше, и средняя скорость vav определяется посредством сигналов интерференции само-смешивания по формуле v=f*λ/(2*sin(α)), как описано выше. Скорость отсчета в зависимости от скорости для воздушного распределения 12 (крупные частицы) хорошо соответствует соотношению v1/3. Зная скорость из доплеровских сигналов, можно получить плотность частиц (значение РМ2,5), и результат сильно зависит от скорости. Для распределений 13, 14 с более мелкими частицами значения PM2,5 при высоких скоростях будут слишком низкими, так как многие мелкие частицы больше не обнаруживаются.
Фиг. 7 показывает соотношение числа отсчетов частиц при различных пороговых уровнях 50 отношения сигнала к шуму в зависимости от диаметра частиц или размера 10 для различных скоростей частиц. Линия 51 показывает соотношение числа отсчетов частиц при первой скорости 0,05 м/с. Линия 52 показывает соотношение отсчетов частиц при второй скорости 0,6 м/с, а линия 53 показывает соотношение отсчетов частиц при третьей скорости 7 м/с. Путем определения скорости отсчета при пороговом уровне, равном 6- и 15-кратному уровню шума, получают меру для числа мелких частиц. Взвешенное среднее по всем размерам частиц является функцией распределения частиц и скорости. Максимальное значение в данном примере равно 0,30 для частиц в воздухе при 0,05 м/с, минимальное значение равно 0,12 для ладана при 7 м/с. Значение РМ2,5 с минимизированной ошибкой (см. график) получают с использованием
РМ2,5  ,
,
при #meas= число измеренных частиц, c2=4,5, vref=0,6 м/с и ratiotwothrref=0,3. Фиг. 7 показывает отсчеты 20 частиц различных распределений 12, 13 и 14 частиц, скорректированных для мелких частиц посредством этой формулы. Все распределения 12, 13 и 14 частиц показывают приемлемую (почти плоскую) скорость отсчета как функцию скорости частиц. Дальнейшее улучшение определения плотности частиц в случае малых числовых апертур может быть обеспечено путем определения относительной вероятности обнаружения, как описано выше. Низкочастотные вариации скорости могут быть обработаны путем усреднения по ряду периодов времени измерений.
Фиг. 9 показывает зависимость скорости плотностей частиц, определенных посредством основанного на скорости модуля лазерного датчика, которая сравнивается с опорными экспериментами с профессиональным оборудованием. Ордината 37 показывает относительную плотность частиц. Оптимальным результатом было бы то, что как модуль лазерного датчика, так и профессиональное оборудование измеряют ту же самую плотность частиц. Это привело бы к измеренным значениям 48, расположенным на прямой линии, параллельной абсциссе 37, показывающей скорость частиц со значением 1 ординаты. Стандартное отклонение измерений при различных скоростях в диапазоне скоростей между 0,01 мс и 7 м/с составляет около 0,2, что является хорошим результатом для такого простого модуля лазерного датчика, содержащего два лазера и соответствующие детекторы, работающие по существу без определенного потока частиц, чтобы выдать, например, качественную индикацию, например, загрязнения воздуха.
Фиг. 10 показывает схематичное представление второго модуля 100 лазерного датчика. Фиг. 10 показывает модуль лазерного датчика, который выполнен, чтобы определять плотность частиц и, опционально, объекты 20 на основе измерений интерференции. Модуль 100 лазерного датчика содержит в этом варианте осуществления и по причинам ясности только один первый лазер 111 для обсуждения принципа измерения. Расширение до двух, трех или более лазеров и соответствующих детекторов очевидно из фиг. 1, 2, 13 и 14. Первый лазер 111 излучает лазерный свет на поляризационной делитель 152 луча. Лазерный свет отражается на поляризационном делителе 152 луча и проходит четвертьволновую пластину 153, устройство 155 оптического фильтра и фокусирующее устройство 157. Четвертьволновая пластина 153 установлена своей оптической осью под углом 45° по отношению к направлению поляризации первого лазера 111. Таким способом создается свет круговой поляризации. Устройство 155 оптического фильтра характеризуется узкой полосой пропускания вокруг длин волн излучения первого лазера 111 (например, 850 нм). Устройство 155 оптического фильтра оптимизировано для подавления окружающего света и необходимо только тогда, когда окружающий свет может вызвать проблемы обнаружения. Фокусирующее устройство 157 может, например, быть линзой или линзой или узлом, содержащим более одного оптического устройства. Второй модуль 100 лазерного датчика выполнен таким образом, что определенная часть лазерного света отражаются на одной из границ раздела (например, границе раздела между устройством 155 оптического фильтра и воздухом), прежде чем лазерный луч выходит из второго модуля 100 лазерного датчика. Часть лазерного света, выходящего из второго модуля 100 лазерного датчика, является первым измерительным лучом 111', который фокусируется в первый измерительный объем 161. Частицы 10 отражают часть первого измерительного луча 111', так что часть отраженного света повторно входит во второй модуль 100 лазерного датчика. Отраженный свет, повторно входящий во второй модуль лазерного датчика, проходит фокусирующее устройство 157, оптический фильтр 155 и четвертьволновую пластину 153. Линейно-поляризованный свет проходит поляризационный делитель 152 луча и интерферирует с лазерным светом, отраженным на одной из границ раздела, прежде чем выйти из второго модуля 100 лазерного датчика. Первый детектор 121 (например, фотодиод) детектирует интерферирующий свет, и соответствующий измерительный сигнал передается на блок 140 оценки. Плотность частиц может быть определена на основе числа частиц, определенных в течение заданного периода времени, и скорости частиц (например, посредством измерения времени перехода или на основе различных измерительных лучей 111', 112', 113', как описано, например, выше и ниже). Второй модуль 100 лазерного датчика опционально может быть выполнен, чтобы определять объект 25 (например, палец).
Фиг. 11 показывает расстояние обнаружения как функцию числовой апертуры. Кривая зависит от чувствительности для интерференции само-смешивания конкретного лазера и используемого объекта. Кривая, таким образом, показывает общую тенденцию, но абсолютные значения различаются в зависимости от чувствительности для интерференции само-смешивания конкретного лазера. Измерительный луч 111', 112', 113', излучаемый лазером 111, 112, 113, который падает на объект 25 (например, кожу), будет обратно рассеиваться к лазеру 111, 112, 113. Это будет генерировать доплеровский сигнал, который будет видимым в спектре мощности сигнала при обнаружении посредством соответствующего детектора 121, 122. Так как мощность сигнала этого доплеровского сигнала будет больше, чем шум, он будет наблюдаться как пик в спектре мощности. Пик достаточно широк, чтобы наблюдать высоту пика в области спектра мощности. Высота пика доплеровского сигнала в спектре мощности измеренного сигнала детектора масштабируется как

Эта формула справедлива, когда расстояние d от линзы до объекта 25 (например, руки) значительно больше, чем расстояние dfocus фокуса по отношению к положению линзы). Для числовой апертуры (NA) NA 0,03 и фокуса на 5 мм от линзы, эмпирически установлено, что доплеровский сигнал наблюдается до, например, 15 см. В предположении предела SNR на расстоянии 15 см для NA=0,03, это дает

Фиг. 11 показывает эту функцию, где X-ось показывает числовую апертуру 62 и Y-ось показывает расстояние 61 обнаружения в метрах. Требуемый диапазон для обнаружения близости больше, чем 10 см. Поэтому NA должна быть меньше, чем 0,1, чтобы обеспечить возможность обнаружения близости или управления жестом, как указано прямоугольником на левой стороне на фиг. 11.
Фиг. 12 показывает минимально обнаруживаемый размер частиц как функцию числовой апертуры. Кривые вновь зависят от чувствительности для интерференции само-смешивания конкретного лазера и используемого объекта. Кривые показывают, таким образом, общую тенденцию, но абсолютные значения различаются в зависимости от чувствительности для интерференции само-смешивания измерительной системы. Х-ось вновь показывает числовую апертуру 62, и Y-ось показывает минимальный размер [мкм] 63 частиц. Линия 66 показывает минимальный размер частиц, который может быть обнаружен при скорости частиц 0,02 м/с как функцию числовой апертуры 62. Линия 67 показывает минимальный размер частиц, которые могут быть обнаружены при скорости частиц 6 м/с как функцию числовой апертуры 62. Из фиг. 12 следует, что NA для обнаружения частиц должна быть выбрана выше 0,028, чтобы иметь возможность обнаруживать частицы 0,4 микрона со скоростью 6 мс, как показано прямоугольником на правой стороне. Комбинация обоих условий, рассмотренных в отношении фиг. 11 и фиг. 12, требует для обнаружения частиц и восприятия близости числовую апертуру для системы 0,028<NA<0,1. Диапазон зависит от конкретного лазера, как описано выше. Обнаружение объектов и мельчайших частиц зависит от чувствительности системы, и это только пример для конкретной системы. Диапазон для более чувствительной системы находится между 0,02<NA<0,06 и может быть даже между 0,015<NA <0,05 для наиболее чувствительных доступных систем.
Фиг. 13 показывает схематичное представление третьего модуля 100 лазерного датчика. Третий модуль 100 лазерного датчика содержит первый лазер 111 и второй лазер 112. Оба лазера 111, 112 могут быть боковыми излучателями, которые расположены так, чтобы излучать лазерный свет в одном и том же направлении. Оптический узел 150 оптически сопряжен с каждым лазером 111, 112, чтобы перенаправить соответствующий измерительный луч 111', 112' так, что оба измерительных луча 111' и 112' направлены в тот же самый измерительный объем. Оптический узел 150 содержит поверхностные дифракционные решетки для отклонения измерительных лучей 111', 112' и другие оптические устройства, так что числовая апертура измерительных лучей 111', 112' составляет 0,03. Первый и второй сигналы интерференции или сигналы интерференции само-смешивания могут генерироваться после отражения первого и/или второго измерительных лучей 111', 112' на частицах, содержащихся в потоке частиц параллельно к поверхности третьего модуля 100 лазерного датчика. Сигналы интерференции или сигналы интерференции само-смешивания обнаруживается первым и/или вторым детектором 121, 122. Обнаруженные сигналы интерференции или сигналы интерференции само-смешивания принимаются и оцениваются посредством блока 140 оценки. Лазеры 111, 112 возбуждаются посредством электрического драйвера 130. Результаты электрических измерений, сгенерированные посредством блока 140 оценки, а также электрическая энергия могут быть обеспечены посредством общего интерфейса 135. В качестве альтернативы, можно использовать отдельные интерфейсы. Фиг. 13 дополнительно показывает объект 25, блокирующий второй измерительный луч 112'. Блокирующий объект расположен на окне излучения модуля 100 лазерного датчика. Блокирующий объект обнаруживается посредством возбуждения второго лазера 112 модулированным током возбуждения (например, треугольным током возбуждения) в течение предопределенных периодов времени. Блок 140 оценки может быть выполнен, чтобы определять, что сигнал интерференции или сигнал интерференции само-смешивания не относится к обнаружению частиц 10 (например, большая временная длительность, близкое расстояние до объекта). Блок 140 оценки может быть выполнен, чтобы игнорировать сигнал интерференции или сигнал интерференции само-смешивания и, опционально, генерировать соответствующий сигнал ошибки.
Фиг. 14 показывает схематичное представление вида сверху четвертого модуля 100 лазерного датчика. Три лазера 111, 112, 113 выполнены, чтобы излучать измерительные лучи 111', 112', 113' в различные первый, второй и третий измерительный объем 161, 162, 163. Оптический узел 150 в этом случае выполнен таким образом, что первый измерительный луч 111' и второй измерительный луч 112' заключают тот же угол, что и второй измерительный луч 112' и третий измерительный луч 113', и что и третий измерительный луч 113' и первый измерительный луч 111'. Угол, заключенный между измерительными лучами 111', 112', 113', предпочтительно равен 90°. Второй модуль 100 лазерного датчика, таким образом, задействуется, чтобы определять трехмерную среднюю скорость. Оптический узел 150 дополнительно содержит микро-оптический компонент, который выполнен, чтобы фокусировать соответствующие измерительные лучи 111', 112', 113', направленные в первый, второй, третий измерительный объем 161, 162, 163, с числовой апертурой 0,025 в соответствующий измерительный объем.
Фиг. 15 показывает схематичное представление первого микро-оптического компонента 151а, который может содержаться в оптическом узле 150. Микро-оптический компонент 151а состоит из зеркала на плоской поверхности пластины. Так, например, 151a может быть выполнен из UV-отверждаемого материала реплики. Также возможны другие технологии, такие как формование или полировка стекла. Зеркало в этом случае основано на полном внутреннем отражении, чтобы перенаправлять первый измерительный луч 111'. Расстояние х1 между центром первого лазера 111 и кромкой первого микро-оптического компонента 151 составляет х1=0,04 мм. Высота первого микро-оптического компонента 151а составляет y1=0,20 мм.
Фиг. 16 показывает схематичное представление части первого оптического узла 150. Эта часть содержит первый микро-оптический компонент 151a и фокусирующий элемент 151b. Фокусирующий элемент 151b представляет собой линзу с размером менее 1 мм, а общая высота y2 той части оптического устройства y2=1,1 мм. Линза выполнена с возможностью фокусировки первого измерительного луча 111' в первый измерительный объем 161. Каждый из лазеров 111, 112, 113 может быть назначен такой части первого оптического устройства 150. Первый микро-оптический компонент 151a и фокусирующий элемент 151b показаны как отдельные элементы для ясности. Может быть предпочтительным интегрировать два или три таких первых микро-оптических компонента 151a и два или три таких фокусирующих элемента 151b в один интегрированный оптический узел 150. Также возможно, что один фокусирующий элемент 151b принимает первый измерительный луч 111' из двух, трех, четырех или более первых лазеров 111 с ассоциированным первым микро-оптическим компонентом 151а таким образом, что, например, матрица лазеров может быть использована, чтобы излучать пучок первых измерительных лучей 111'. Фокусирующий элемент 151b выполнен, чтобы фокусировать первый измерительный луч 111' с числовой апертурой 0,03.
Фиг. 17 показывает схематичное представление второго оптического узла 150, содержащего второй микро-оптический компонент 151a и второй фокусирующий элемент 151b. Второй микро-оптический компонент 151a содержит две отражающие поверхности, так что первый измерительный луч 111' поворачивается в микро-оптическом компоненте 151а в форме Z, повернутой на 90° против часовой стрелки. Второй фокусирующий элемент 151b представляет собой линзу, выполненную, чтобы фокусировать первый измерительный луч 111' с числовой апертурой 0,035 в первый измерительный объем. Общая высота (высота компоновки) второго микро-оптического компонента 151a, второго фокусирующего элемента 151b и первого лазера 111 составляет y2=0,7 мм.
Фиг. 18 показывает схематичное представление устройства 190 мобильной связи, содержащего модуль 100 лазерного датчика. Модуль лазерного датчика приспособлен, чтобы излучать первый измерительный луч 111' и второй измерительный луч 112', которые образуют между собой угол φ=60°. Устройство 190 мобильной связи содержит пользовательский интерфейс 191, устройство 192 обработки и основное устройство 193 памяти. Основное устройство 192 обработки соединено с основным устройством 193 памяти и с модулем 100 лазерного датчика. Основное устройство 192 обработки содержит по меньшей мере часть функциональности блока 140 оценки, который описан выше. Основное устройство 192 обработки хранит данные, относящиеся к обнаружению частиц, в основном устройстве 193 памяти. В альтернативном варианте осуществления также может быть возможным, что основное устройство 192 обработки и основное устройство 193 памяти используются только для подготовки или адаптации данных, обеспечиваемых посредством модуля 100 лазерного датчика, так что данные могут быть представлены пользователю устройства 190 мобильной связи посредством пользовательского интерфейса 191. Модуль 100 лазерного датчика приводится в действие посредством источника питания устройства 190 мобильной связи. Устройство 190 мобильной связи может дополнительно содержать устройство определения ориентации (не показано). Устройство определения ориентации может, например, быть выполнено с возможностью определения относительного положения устройства 190 мобильной связи по отношению к земле. Устройство определения ориентации может быть связано с блоком 140 оценки или основным устройством обработки, чтобы комбинировать данные, обеспечиваемые посредством модуля 100 лазерного датчика, и данные, обеспечиваемые посредством устройства определения ориентации. Взаимодействие устройства определения ориентации и модуля 100 лазерного датчика может обеспечивать более надежное определение скорости ветра и плотности частиц, а также может обеспечивать информацию о направлении ветра. Модуль 100 лазерного датчика может быть дополнительно выполнен, чтобы обнаруживать объект 25. Объект 25 может, например, быть рукой, которая может быть использована для управления жестами.
Тот же принцип может быть использован и в других устройствах, содержащих модуль 100 лазерного датчика. Дополнительные датчики могут быть использованы для обеспечения информации о положении или скорости устройства (например, автомобиля, содержащего модуль 100 лазерного датчика). Скорость устройства может быть использована, например, для поддержки оценки сигналов измерения (например, определения адаптированной опорной скорости).
Фиг. 19 показывает схематичное представление способа определения плотности частиц. На этапе 410 определяется значение скорости из значений частоты, определенных посредством сигналов интерференции само-смешивания (см. уравнение 1). На этапе 420 определяются средние скорости частиц (см. уравнение 2). Относительная вероятность обнаружения определяется на этапе 430 (см. уравнение 3), особенно в случае модуля 100 лазерного датчика 100 с оптическим узлом 150, характеризуемым малой числовой апертурой (например, 0,03). Плотность частиц или значение РМ 2,5 определяется на этапе 440 (см. уравнение 4).
Хотя изобретение было проиллюстрировано и подробно описано на чертежах и в приведенном выше описании, такие иллюстрации и описание следует рассматривать как иллюстративные или примерные, а не ограничивающие.
На основе изучения настоящего раскрытия, другие модификации будут очевидны специалистам в данной области техники. Такие модификации могут предусматривать другие признаки, которые уже известны в данной области техники и которые могут быть использованы вместо признаков или в дополнение к признакам, описанным в данном документе.
Изменения в раскрытых вариантах осуществления изобретения могут быть поняты и осуществлены специалистами в данной области техники на основе изучения чертежей, раскрытия и прилагаемой формулы изобретения.
В формуле изобретения слово ʺсодержащийʺ не исключает других элементов или этапов, а формы единственного числа не исключают множества элементов или этапов. Сам по себе тот факт, что определенные характеристики изложены во взаимно различных зависимых пунктах формулы изобретения, не означает, что комбинация этих характеристик не может быть использована с выгодой.
Любые ссылочные обозначения в формуле изобретения не должны рассматриваться как ограничивающие его объем.
Список ссылочных позиций:
5 число частиц/м3 на 0,1 мкм бин
10 размер частиц [мкм]
11 плоское
12 типовое распределение частиц в воздухе
13 ладан
14 смог в Шанхае
20 отсчеты частиц/(мин*мкг/м3)
21 0,05 м/с
22 0,6 м/с
23 7 м/с
25 объект
30 скорость частиц [м/с]
37 относительная плотность частиц
48 результат измерения
50 отсчеты частиц при различных пороговых уровнях отношения сигнала к шуму
51 отношение отсчетов частиц при 0,05 м/с
52 отношение отсчетов частиц при 0,6 м/с
53 отношение отсчетов частиц при 7 м/с
61 расстояние обнаружения [м]
62 числовая апертура
63 минимальный размер частиц [мкм]
65 расстояние обнаружения как функция числовой апертуры
66 минимально обнаруживаемый размер частиц как функция числовой апертуры@ 0,02 м/с
67 минимально обнаруживаемый размер частиц как функция числовой апертуры@ 6 м/сек
100 модуль лазерного датчика
102 опорная поверхность
111 первый лазер
111' первый измерительный луч
111" первая проекция первого измерительного луча
112 второй лазер
112' второй измерительный луч
112" вторая проекция второго измерительного луча
113 третий лазер
113' третий измерительный луч
121 первый детектор
122 второй детектор
130 электрический драйвер
135 интерфейс
140 блок оценки
150 оптический узел
151a микро-оптический компонент
151b фокусирующий элемент
151с окно измерения
152 делитель луча
153 четвертьволновая пластина
155 устройство оптического фильтра
157 фокусирующее устройство
161 первый измерительный объем
162 второй измерительный объем
163 третий измерительный объем
190 устройство мобильной связи
191 пользовательский интерфейс
192 основное устройство обработки
193 основное устройство памяти
410 определение значений скорости
420 определение средней скорости частиц
430 определение относительной вероятности для обнаружения
440 определение плотности частиц
90-α угол, заключенный между измерительными лучами и потоком частиц
β1 угол, заключенный между первым измерительным лучом и первой проекцией
β2 угол, заключенный между вторым измерительным лучом и второй проекцией γ угол, заключенный между первой проекцией и второй проекцией на опорной поверхности.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛАЗЕРНЫЙ ДАТЧИК ДЛЯ ОПРЕДЕЛЕНИЯ РАЗМЕРОВ ЧАСТИЦ | 2016 |
|
RU2690083C1 |
| ЛАЗЕРНЫЙ ДАТЧИК ДЛЯ ОБНАРУЖЕНИЯ ПЛОТНОСТИ ЧАСТИЦ | 2016 |
|
RU2716878C2 |
| ЛАЗЕРНЫЙ ДАТЧИК ДЛЯ ОБНАРУЖЕНИЯ НЕСКОЛЬКИХ ПАРАМЕТРОВ | 2016 |
|
RU2717751C2 |
| СЧИТЫВАЮЩЕЕ УСТРОЙСТВО И СПОСОБ ЧТЕНИЯ ОПТИЧЕСКОГО НОСИТЕЛЯ ИНФОРМАЦИИ | 2007 |
|
RU2434311C2 |
| СИСТЕМА ДЕМОДУЛЯЦИИ СИГНАЛА | 2010 |
|
RU2520357C2 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО КОГЕРЕНТНОГО ТОМОГРАФИЧЕСКОГО ИЗОБРАЖЕНИЯ И СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО КОГЕРЕНТНОГО ТОМОГРАФИЧЕСКОГО ИЗОБРАЖЕНИЯ | 2009 |
|
RU2448339C1 |
| СПЕКТРОСКОПИЧЕСКОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2013 |
|
RU2617555C2 |
| МОДУЛЬ ЛАЗЕРНОГО ДАТЧИКА | 2015 |
|
RU2696335C2 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ТЕЧЕНИЯ КРОВИ | 2015 |
|
RU2610559C1 |
| УСТРОЙСТВО УМЕНЬШЕНИЯ ПОГРЕШНОСТИ ЧУВСТВИТЕЛЬНОСТИ ПО ДАВЛЕНИЮ И ТЕМПЕРАТУРЕ У ВЫСОКОТОЧНЫХ ОПТИЧЕСКИХ ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ ПЕРЕМЕЩЕНИЯ | 2014 |
|
RU2660413C2 |
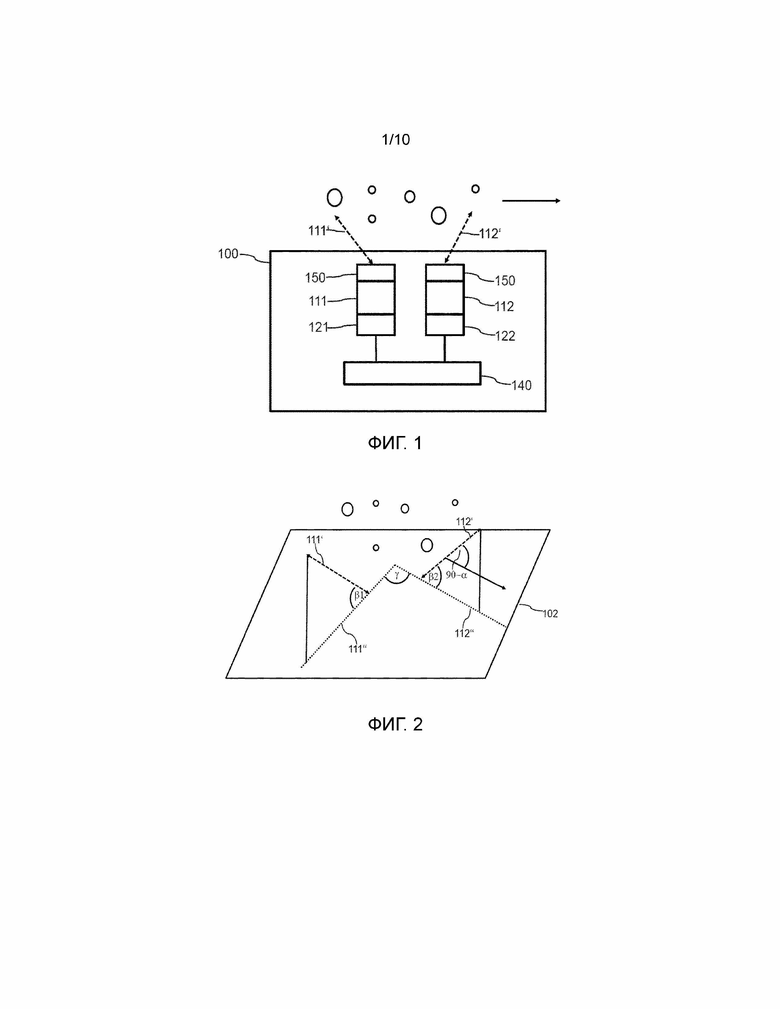
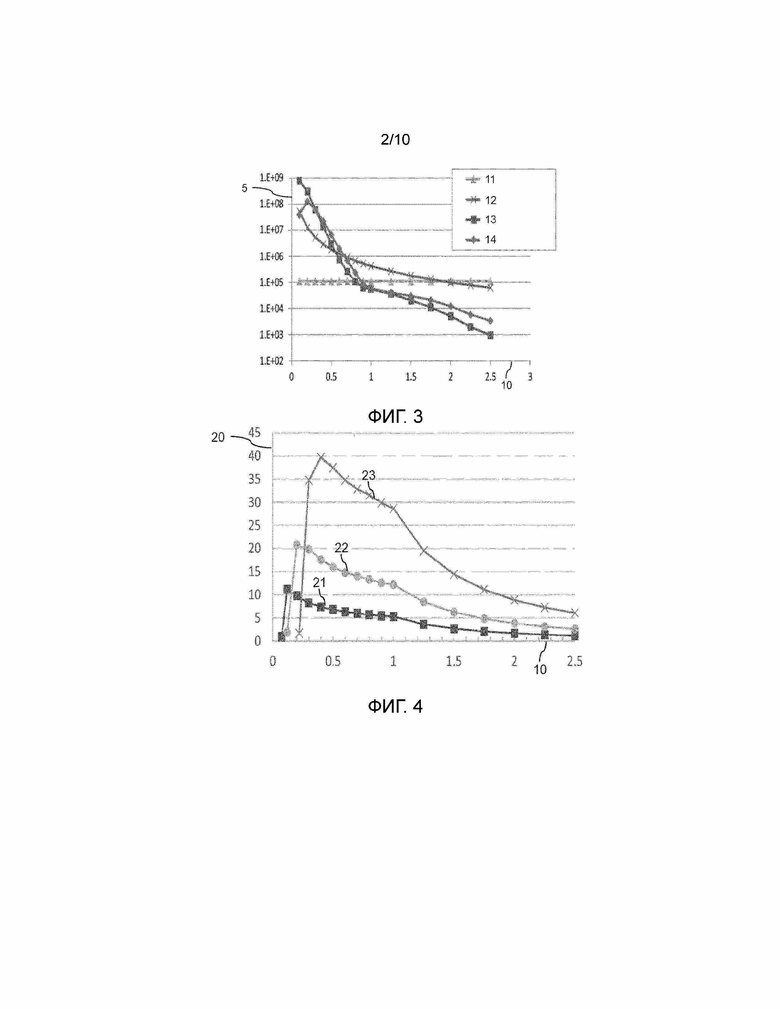
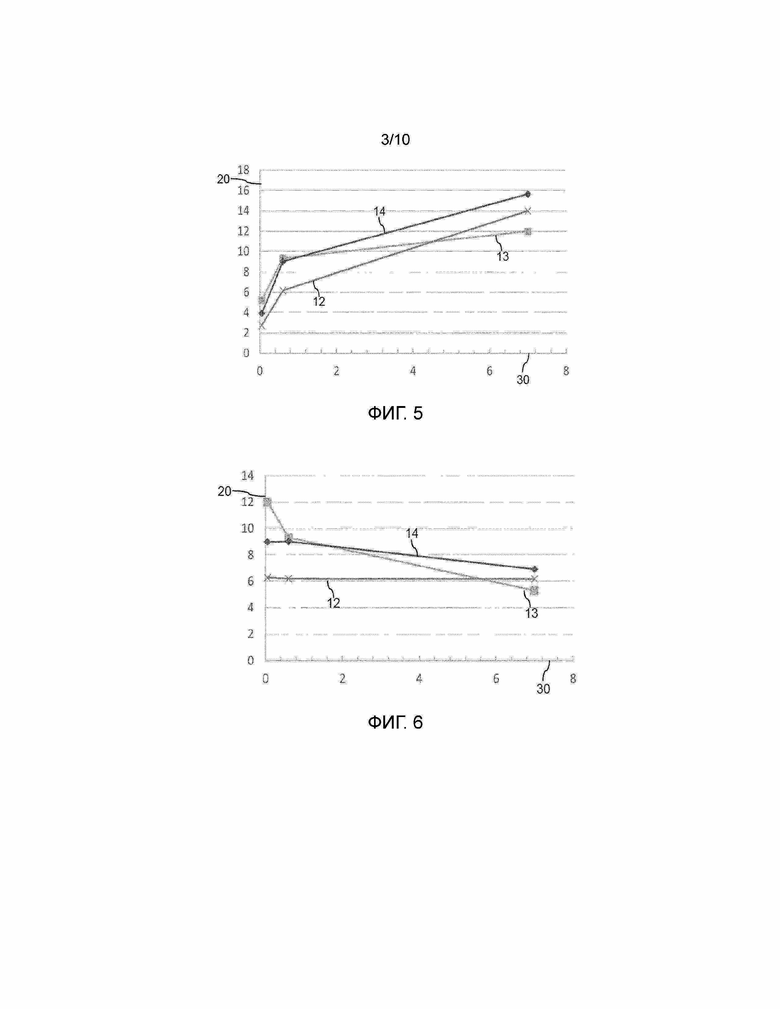
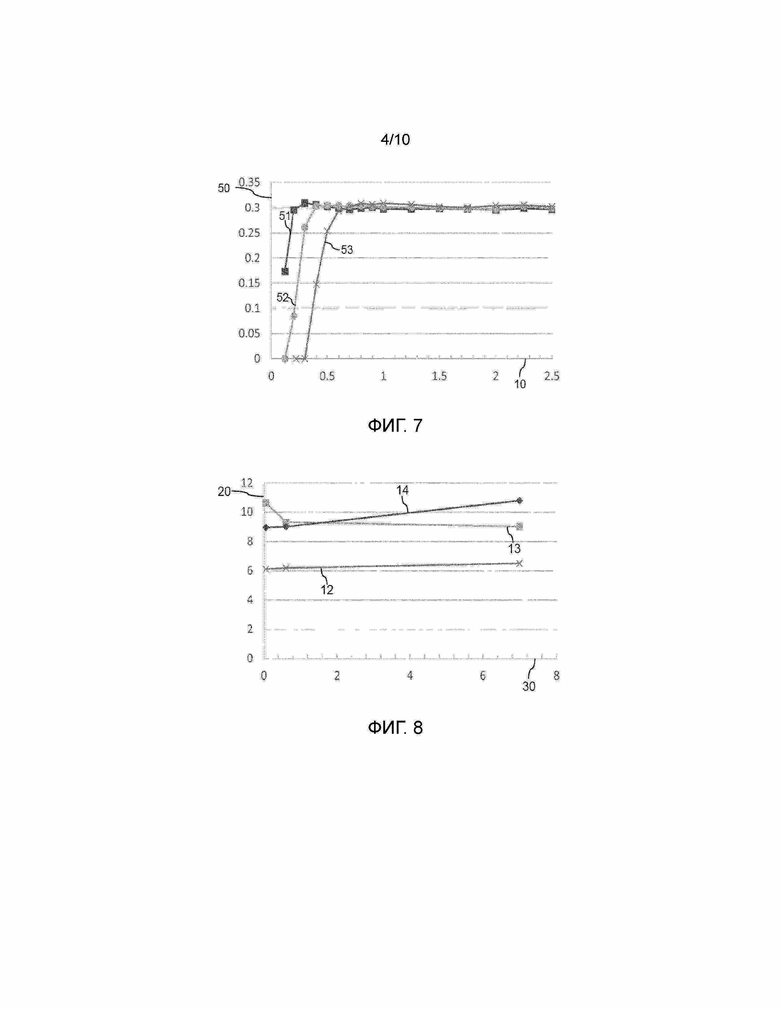
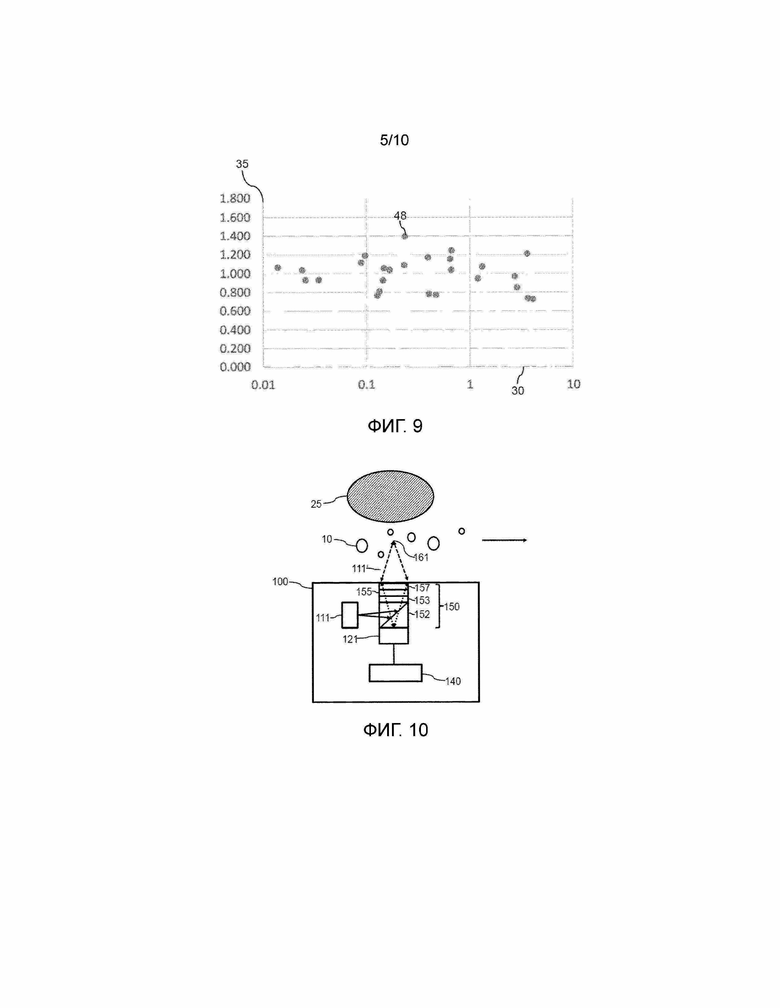
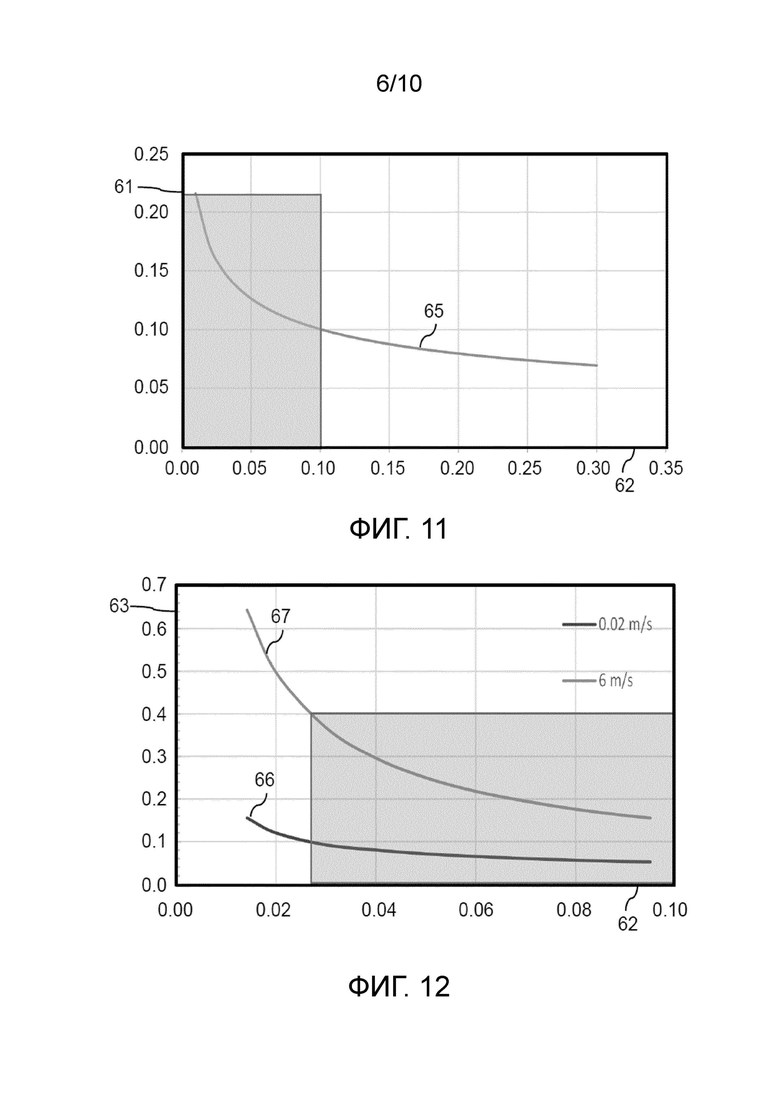
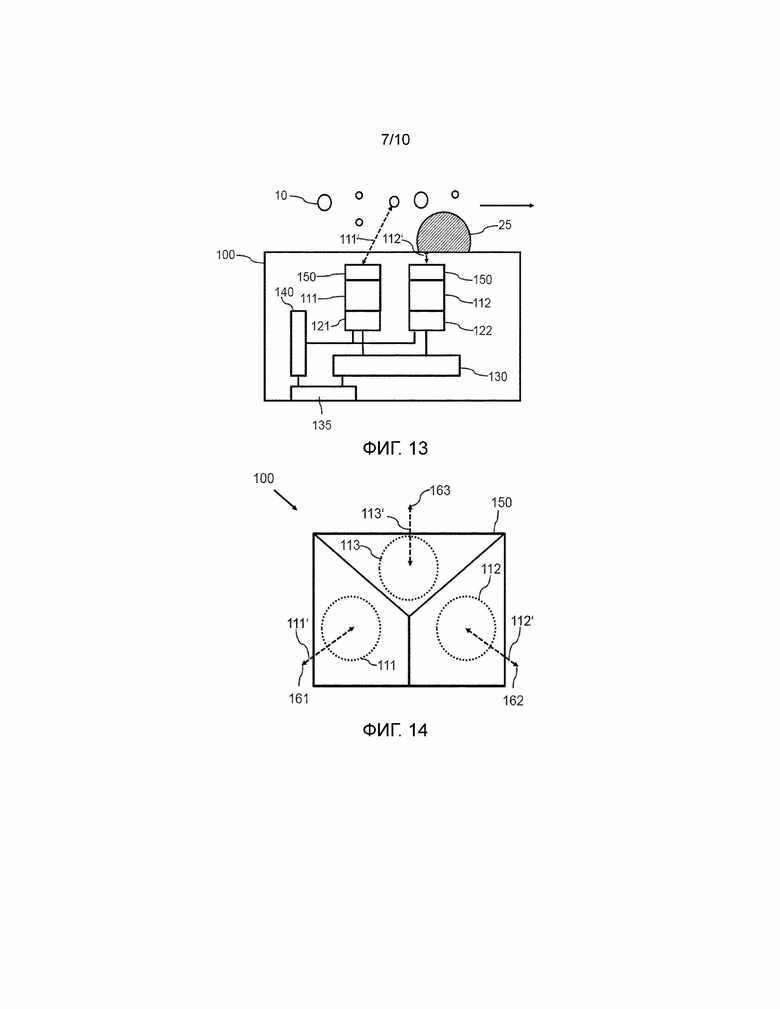
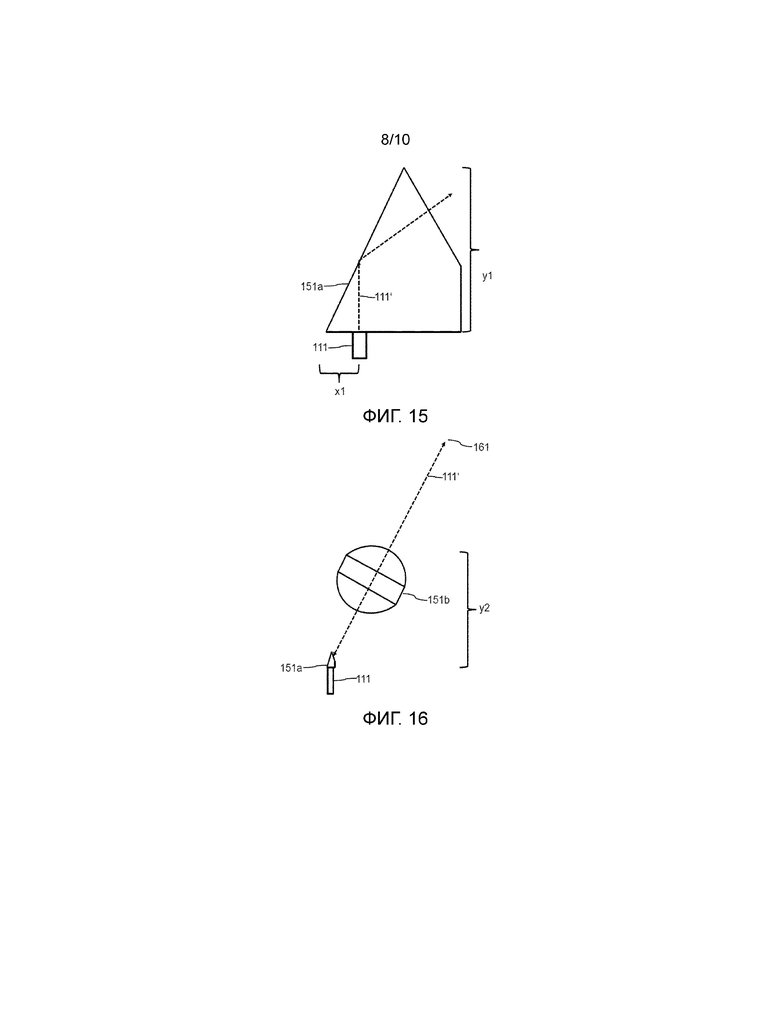
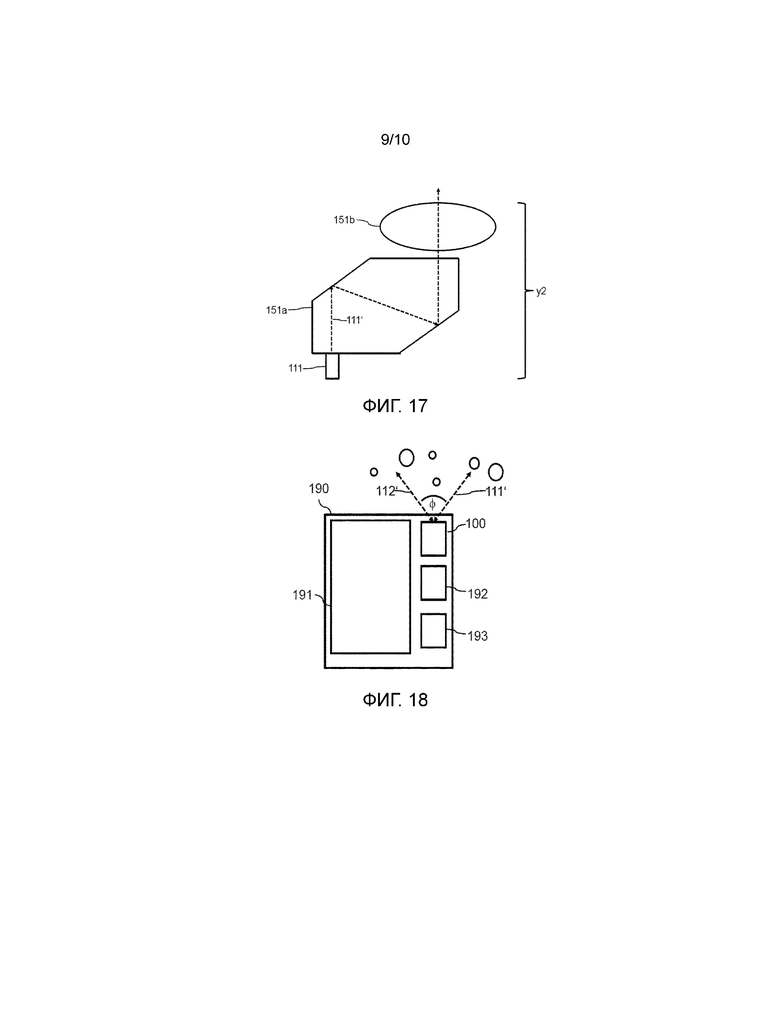
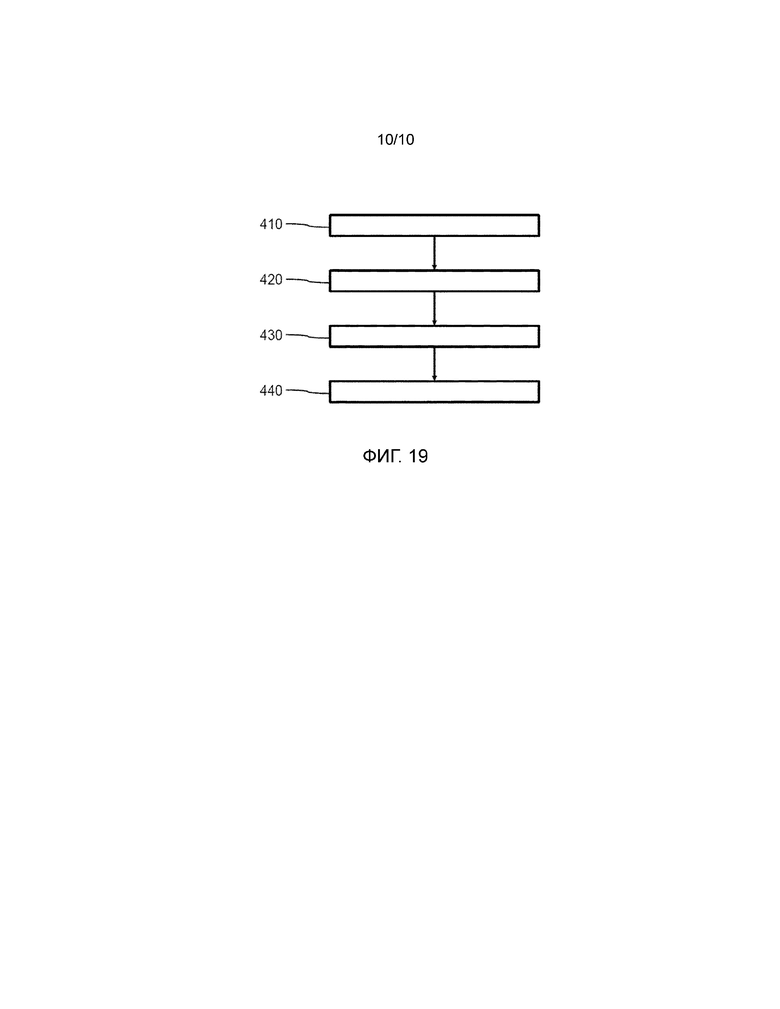
Изобретение описывает модуль лазерного датчика для определения плотности мелких частиц. Модуль лазерного датчика включает в себя: два лазера, излучающие измерительные лучи, оптический узел, фокусирующий первый и второй измерительные лучи в первый и второй измерительные объемы соответственно. Узел имеет первую и вторую числовые апертуры относительно соответствующих лучей. Апертуры выбраны так, чтобы обнаруживать предопределенный минимальный размер частиц в пределах предопределенного диапазона скоростей. Первый измерительный луч и второй измерительный луч взаимно образуют угол φ между 10° и 160°. Модуль также содержит 2 детектора, каждый из которых выполнен, чтобы определять первый и второй сигналы интерференции самосмешивания первой и второй оптических волн в первом и втором лазерных резонаторах первого и второго лазеров соответственно. Модуль содержит блок оценки, принимающий сигналы обнаружения, сгенерированные детекторами в ответ на определенные сигналы интерференции самосмешивания, при это блок определяет первую и вторую средние скорости частиц соответственно посредством сигналов детектирования, принятых в предопределенный период времени. Также блок оценки определяет первое и второе числа частиц соответственно на основе сигналов обнаружения в предопределенном периоде времени, а затем определяет плотность частиц на основе средней скорости частиц. Изобретение также относится к способу определения плотности частиц и соответствующему компьютерному программному продукту. Изобретение также относится к устройству (190) мобильной связи, содержащему такой модуль (100) лазерного датчика. Технический результат – упрощение конструкции и повышение точности. 6 н. и 10 з.п. ф-лы, 19 ил.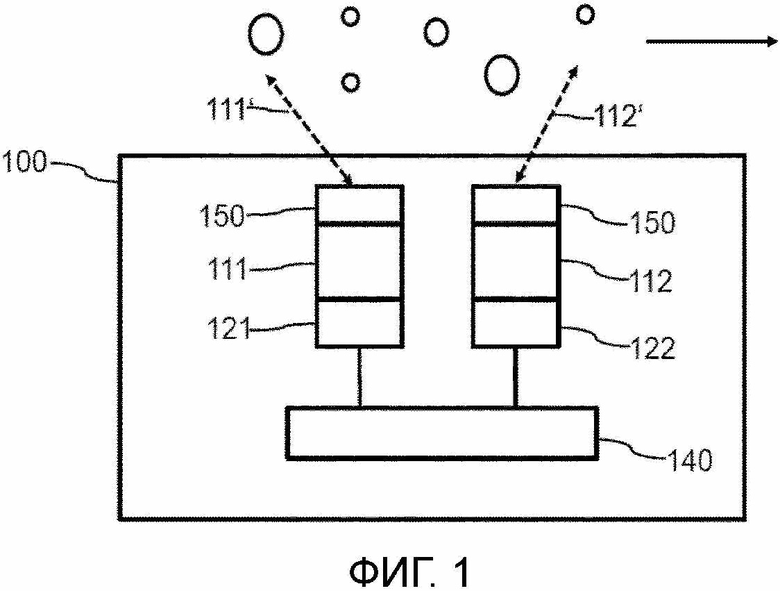
1. Модуль (100) лазерного датчика для определения плотности частиц мелких частиц с размером частиц между 0,05 мкм и 10 мкм, содержащий:
по меньшей мере первый лазер (111), выполненный, чтобы излучать первый измерительный луч (111'), и по меньшей мере второй лазер (112), выполненный, чтобы излучать второй измерительный луч (112'),
оптический узел (150), выполненный, чтобы фокусировать по меньшей мере первый измерительный луч (111') в первый измерительный объем (161), причем оптический узел дополнительно выполнен, чтобы фокусировать по меньшей мере второй измерительный луч (112') во второй измерительный объем (162), причем оптический узел характеризуется первой числовой апертурой относительно первого измерительного луча (111') и второй числовой апертурой относительно второго измерительного луча (112'), причем первая числовая апертура и вторая числовая апертура выполнены, чтобы обнаруживать предопределенный минимальный размер частиц при опорной скорости, причем опорная скорость выбрана в пределах предопределенного диапазона скоростей между 0,01 м/с и 7 м/с, содержащего опорную скорость, и при этом первый измерительный луч (111') и второй измерительный луч (112') взаимно образуют угол φ между 10° и 160°,
по меньшей мере первый детектор (121) выполнен, чтобы определять первый сигнал интерференции самосмешивания первой оптической волны в первом лазерном резонаторе первого лазера (111),
по меньшей мере второй детектор (122) выполнен, чтобы определять второй сигнал интерференции самосмешивания второй оптической волны во втором лазерном резонаторе второго лазера (112),
блок (140) оценки, причем блок (140) оценки выполнен, чтобы принимать сигналы обнаружения, сгенерированные по меньшей мере первым детектором (121) и вторым детектором (122) в ответ на определенные сигналы интерференции самосмешивания, причем блок (140) оценки дополнительно выполнен, чтобы определять по меньшей мере первую среднюю скорость частиц, обнаруженных первым детектором (121), и по меньшей мере вторую среднюю скорость частиц, обнаруженных вторым детектором (122), посредством сигналов детектирования, принятых в предопределенный период времени, причем блок (140) оценки дополнительно выполнен, чтобы определять по меньшей мере первое число частиц на основе сигналов обнаружения, обеспеченных первым детектором (121) в предопределенном периоде времени, и по меньшей мере второе число частиц на основе обнаруженных сигналов, обеспеченных вторым детектором (122) в предопределенном периоде времени, и причем блок (140) оценки дополнительно выполнен, чтобы определять плотность частиц на основе средней скорости частиц, определенной по меньшей мере посредством первой средней скорости и второй средней скорости, по меньшей мере первого числа частиц и по меньшей мере второго числа частиц.
2. Модуль (100) лазерного датчика по п. 1, причем первый измерительный луч (111') образует первый угол β1 с опорной поверхностью (102), причем второй измерительный луч (112') образует второй угол β2 с опорной поверхностью (102), причем проекция первого измерительного луча (111ʺ) на опорной поверхности (102) и проекция второго измерительного луча (112ʺ) на опорной поверхности (102) образуют угол γ между 20° и 160°, предпочтительно между 60° и 120° и наиболее предпочтительно между 80° и 100°.
3. Модуль (100) лазерного датчика по п. 1 или 2, причем первая и вторая числовые апертуры находятся между 0,01 и 0,06, предпочтительно между 0,02 и 0,04, по отношению к измерительным лучам (111', 112'), причем опорная скорость обнаруженных частиц меньше чем 1 м/сек.
4. Модуль (100) лазерного датчика по пп. 1, 2 или 3, причем опорная скорость выбрана так, что минимизация ошибки в пределах предопределенного диапазона скоростей, содержащего опорную скорость, является симметричной относительно опорной скорости.
5. Модуль (100) лазерного датчика по любому одному из предыдущих пунктов, причем блок (140) оценки дополнительно выполнен, чтобы корректировать определенную плотность частиц на коэффициент, содержащий кубический корень из отношения между опорной скоростью и определенной средней скоростью частиц.
6. Модуль лазерного датчика (100) по любому одному из предыдущих пунктов, причем первый измерительный объем (161) является линейно протяженным в направлении первого измерительного луча (111'), и причем второй измерительный объем (162) является линейно протяженным в направлении второго измерительного луча (112'), причем блок (140) оценки выполнен, чтобы определять первую относительную вероятность для обнаружения частиц в первом измерительном объеме (161), причем блок оценки выполнен, чтобы определять вторую относительную вероятность для обнаружения частиц во втором измерительном объеме (162), и причем блок (140) оценки дополнительно выполнен, чтобы корректировать определенную плотность частиц посредством первой относительной вероятности и второй относительной вероятности.
7. Модуль (100) лазерного датчика по любому одному из предыдущих пунктов, причем блок (140) оценки дополнительно выполнен, чтобы определять первую скорость отсчета частиц при первом пороговом уровне отношения сигнала к шуму и вторую скорость отсчета частиц при втором пороговом уровне отношения сигнала к шуму, отличном от первого порогового уровня отношения сигнала к шуму, и причем блок (140) оценки дополнительно выполнен, чтобы корректировать определенную плотность частиц посредством первой скорости отсчета частиц и второй скорости отсчета частиц.
8. Модуль (100) лазерного датчика по любому одному из предыдущих пунктов, причем модуль (100) лазерного датчика содержит по меньшей мере третий лазер (113), выполненный, чтобы излучать третий измерительный луч (113'), причем оптический узел (150) выполнен, чтобы фокусировать третий измерительный луч (113') в третий измерительный объем (163), причем первый измерительный луч (111'), второй измерительный луч (112') и третий измерительный луч (113') взаимно образуют угол между 10° и 110°, модуль (100) лазерного датчика дополнительно содержит третий детектор, выполненный, чтобы определять третий сигнал интерференции самосмешивания третьей оптической волны в третьем лазерном резонаторе третьего лазера (113), причем блок (140) оценки дополнительно выполнен, чтобы принимать сигналы обнаружения, генерируемые третьим детектором, причем блок (140) оценки дополнительно выполнен, чтобы определять третью среднюю скорость частиц, обнаруженных третьим детектором в предопределенном периоде времени, причем блок (140) оценки дополнительно выполнен, чтобы определять третье число частиц посредством сигналов обнаружения, генерируемых третьим детектором в предопределенном периоде времени, и причем блок (140) оценки дополнительно выполнен, чтобы определять плотность частиц на основе средней скорости частиц, определенной посредством первой средней скорости, второй средней скорости и третьей средней скорости, и первого числа частиц, второго числа частиц и третьего числа частиц.
9. Модуль (100) лазерного датчика по любому одному из предыдущих пунктов, причем модуль (100) лазерного датчика выполнен, чтобы определять плотность частиц в первом режиме, и причем модуль лазерного датчика (100) выполнен, чтобы обнаруживать близость объекта с размером не менее 1 мм во втором режиме.
10. Модуль (100) лазерного датчика для определения плотности частиц мелких частиц с размером частиц между 0,05 мкм и 10 мкм, содержащий:
по меньшей мере первый лазер (111), выполненный, чтобы излучать первый измерительный луч (111'), и по меньшей мере второй лазер (112), выполненный, чтобы излучать второй измерительный луч (112'),
оптический узел (150), выполненный, чтобы фокусировать по меньшей мере первый измерительный луч (111') в первый измерительный объем (161), при этом оптический узел дополнительно выполнен, чтобы фокусировать по меньшей мере второй измерительный луч (112') во второй измерительный объем (162), причем оптический узел характеризуется первой числовой апертурой относительно первого измерительного луча (111') и второй числовой апертурой относительно второго измерительного луча (112'), причем первая числовая апертура и вторая числовая апертура выполнены относительно измерительных лучей (111', 112'), чтобы обнаруживать предопределенный минимальный размер частиц при опорной скорости, причем опорная скорость выбрана в пределах предопределенного диапазона скоростей между 0,01 м/с и 7 м/с, содержащего опорную скорость, и при этом первый измерительный луч (111') и второй измерительный луч (112') взаимно образуют угол φ между 10° и 160°,
по меньшей мере первый детектор (121), выполненный, чтобы определять первый сигнал интерференции,
по меньшей мере второй детектор (122), выполненный, чтобы определять второй сигнал интерференции,
блок (140) оценки, причем блок (140) оценки выполнен, чтобы принимать сигналы обнаружения, генерируемые по меньшей мере первым детектором (121) и вторым детектором (122) в ответ на определенные сигналы интерференции, причем блок (140) оценки дополнительно выполнен, чтобы определять по меньшей мере первую среднюю скорость частиц, обнаруженных первым детектором (121), и по меньшей мере вторую среднюю скорость частиц, обнаруженных вторым детектором (122), посредством сигналов обнаружения, принятых в предопределенном периоде времени, причем блок (140) оценки дополнительно выполнен, чтобы определять по меньшей мере первое число частиц на основе сигналов обнаружения, обеспеченных первым детектором (121) в предопределенном периоде времени, и по меньшей мере второе число частиц на основе обнаруженных сигналов, обеспеченных вторым детектором (122) в предопределенном периоде времени, и причем блок (140) оценки дополнительно выполнен, чтобы определять плотность частиц на основе средней скорости частиц, определенной по меньшей мере посредством первой средней скорости и второй средней скорости, по меньшей мере первого числа частиц и по меньшей мере второго числа частиц.
11. Модуль (100) лазерного датчика по п. 10, причем модуль лазерного датчика (100) выполнен, чтобы обеспечивать первый опорный луч на основе первого измерительного луча (111') посредством частичного отражения первого измерительного луча (111') и второй опорный луч на основе второго измерительного луча (112') посредством частичного отражения второго измерительного луча (112), причем первый детектор (121) выполнен, чтобы определять первый сигнал интерференции на основе интерференции отраженного света первого измерительного луча (111') и первого опорного луча, и причем второй детектор (122) выполнен, чтобы определять второй сигнал интерференции на основе интерференции отраженного света второго измерительного луча (112') и второго опорного луча.
12. Модуль (100) лазерного датчика по п. 10 или 11, причем первый детектор (121) отделен от первого лазера (111), причем второй детектор (122) отделен от второго лазера (112), причем модуль (100) лазерного датчика дополнительно содержит первый делитель (152) луча, выполненный, чтобы обеспечивать первый опорный луч, и причем модуль (100) лазерного датчика дополнительно содержит второй делитель (152) луча, выполненный, чтобы обеспечивать второй опорный луч.
13. Устройство (300) мобильной связи, содержащее модуль (100) лазерного датчика по любому одному из предыдущих пунктов, при этом устройство мобильной связи выполнено, чтобы представлять результаты измерений, обеспечиваемые модулем (100) лазерного датчика.
14. Способ обнаружения частиц с размером частиц между 0,05 мкм и 10 мкм, причем способ содержит этапы:
излучения по меньшей мере первого измерительного луча (111') посредством первого лазера (111),
излучения по меньшей мере второго измерительного луча (112') посредством второго лазера (112),
фокусировки первого измерительного луча (111') с первой числовой апертурой, причем первая числовая апертура выполнена, чтобы обнаруживать предопределенный минимальный размер частиц при опорной скорости, причем опорная скорость находится в пределах предопределенного диапазона скоростей между 0,01 м/с и 7 м/с,
фокусировки второго измерительного луча (112') со второй числовой апертурой, причем вторая числовая апертура выполнена, чтобы обнаруживать предопределенный минимальный размер частиц при опорной скорости, причем опорная скорость находится в пределах предопределенного диапазона скоростей,
определения первого сигнала интерференции или первого сигнала интерференции самосмешивания первой оптической волны в первом лазерном резонаторе первого лазера (111),
определения второго сигнала интерференции или второго сигнала интерференции самосмешивания второй оптической волны во втором лазерном резонаторе второго лазера (112),
определения первой средней скорости на основе первых сигналов интерференции или первых сигналов интерференции самосмешивания, определенных в предопределенном периоде времени,
определения второй средней скорости на основе вторых сигналов интерференции или вторых сигналов интерференции самосмешивания, определенных в предопределенном периоде времени,
определения первого числа частиц посредством первых сигналов интерференции или первых сигналов интерференции самосмешивания, определенных в предопределенном периоде времени,
определения второго числа частиц посредством вторых сигналов интерференции или вторых сигналов интерференции самосмешивания, определенных в предопределенном периоде времени,
определения средней скорости частиц на основе по меньшей мере первой средней скорости и второй средней скорости,
определения плотности частиц на основе по меньшей мере определенной средней скорости, первого числа частиц и второго числа частиц.
15. Устройство памяти, содержащее компьютерный программный продукт, сохраненный на нем, причем компьютерный программный продукт содержит средства кода, причем устройство памяти содержится в модуле (100) лазерного датчика по любому одному из пп. 1-12, причем средства кода выполнены таким образом, что способ по п. 14 может выполняться посредством по меньшей мере одного устройства обработки, содержащегося в модуле (100) лазерного датчика по любому одному из пп. 1-12.
16. Устройство памяти, содержащее компьютерный программный продукт, сохраненный на нем, причем компьютерный программный продукт содержит средства кода, причем устройство памяти содержится в устройстве, содержащем модуль (100) лазерного датчика по любому одному из пп. 1-12, причем средства кода выполнены таким образом, что способ по п. 14 может выполняться посредством по меньшей мере одного устройства обработки устройства, содержащего модуль (100) лазерного датчика по любому одному из пп. 1-12.
| US 9354315 B2, 31.05.2016 | |||
| US 2015233813 A1, 20.08.2015 | |||
| WO 2002037410 A1, 10.05.2002 | |||
| DE 102015207289 A1, 27.10.2016 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОЛИЧЕСТВЕННОГО ОПРЕДЕЛЕНИЯ ЧАСТИЦ В ЖИДКИХ СРЕДАХ | 1996 |
|
RU2205382C2 |

