ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к лазерному датчику или модулю лазерного датчика для определения размеров частиц, связанному с этим способу определения размеров частиц и соответствующему компьютерному программному продукту.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
В US 2014/0226158 A1 описываются системы и способы, которые анализируют свет для определения размера и характеристик частиц. Описанные системы и способы являются сложными и дорогостоящими.
В US 4,871,251 описывается устройство для анализа частиц, содержащихся в текучей среде. Устройство содержит корпус, имеющий окно, оптический источник, предпочтительно содержащий лазерный диод, имеющий малую светоизлучающую площадь, и оптическую систему для фокусирования света от лазерного диода в фокальном пятне таким образом, что размер фокального пятна приблизительно равен размеру светоизлучающей площади лазерного диода. Фотодетектор установлен в корпусе и обнаруживает свет, обратнорассеянный от фокального пятна частицами в текучей среде, и создает электрический сигнал, который содержит последовательность импульсов, связанных с частицами. Электрический сигнал вводится в детектор, который подсчитывает импульсы и показывает число частиц в текучей среде.
В работе SEIICHI SUDO с соавт.: «Быстрое и простое измерение размера частиц для броуновских частиц и планктона в воде с помощью лазера с самосмешением», OPTICS EXPRESS, том 14, № 3, 6 февраля 2006 г. (2006-02-06), страницы 1044-1054, XP002753399, описывается способ измерения размера небольших частиц во взвесях с помощью интерференции самосмешения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Таким образом, целью настоящего изобретения является создание более простого и более дешевого модуля лазерного датчика для определения размеров частиц.
В соответствии с первым аспектом, предлагается модуль лазерного датчика для определения размеров частиц. Модуль лазерного датчика содержит, по меньшей мере, один первый лазер, по меньшей мере, один первый детектор, по меньшей мере, один электрический возбудитель и, по меньшей мере, один блок оценки. Указанный первый лазер выполнен с возможностью излучения первого лазерного света в ответ на сигналы, выдаваемые указанным, по меньшей мере, одним возбудителем. Указанный по меньшей мере, один первый детектор выполнен с возможностью определения первого интерференционного сигнала самосмешения оптической волны в первом лазерном резонаторе первого лазера. Первый интерференционный сигнал самосмешения возникает из-за первого отраженного лазерного света, повторно входящего в первый лазерный резонатор. Первый отраженный лазерный свет отражается частицей, принимающей, по меньшей мере, часть первого лазерного света. Блок оценки выполнен с возможностью определения размера частицы путем определения первого относительного расстояния между частицей и первым лазером с помощью первого интерференционного сигнала самосмешения и путем определения первой информации об амплитуде с помощью первого интерференционного сигнала самосмешения.
Относительное расстояние между частицей и первым лазером может определяться прямо или косвенно. Прямое определение может относиться к модулированному лазерному свету, а косвенное определение может относиться к оптической конфигурации, подробно описываемой ниже. Первая информация об амплитуде содержит всю информацию, которая может быть получена из первого интерференционного сигнала самосмешения, который по существу относится к размеру частицы. Размер частицы определяет количество первого лазерного света, который отражается частицей. Кроме того, расстояние между первым лазером и частицей влияет на первую информацию об амплитуде, которая может извлекаться из первого интерференционного сигнала самосмешения. Кроме того, расхождение луча первого лазерного света в положении частицы влияет на первый отраженный лазерный свет, входящий в первый лазерный резонатор первого лазера. Первый интерференционный сигнал самосмешения, например, подвержен влиянию, если первый лазерный луч сфокусирован, а частица находится не в фокусе. Первая информация об амплитуде может содержать максимальную и/или минимальную амплитуду первого интерференционного сигнала самосмешения. В качестве альтернативы, первый интерференционный сигнал самосмешения может использоваться для определения, например, огибающей измеренного первого интерференционного сигнала самосмешения. Максимальная и/или минимальная амплитуда огибающей может содержаться в первой информации об амплитуде. Максимальная и/или минимальная амплитуда огибающей могут отличаться от максимума и/или минимума первого интерференционного сигнала самосмешения.
Первый лазер может предпочтительно быть выполнен с возможностью излучения лазерного света с длиной волны свыше 750 нм в инфракрасном диапазоне спектра, предпочтительнее всего - между 780 нм и 1300 нм спектра длин волн.
Первый лазер может представлять собой полупроводниковый лазер в виде торцевого излучателя или Лазера Поверхностного Излучения с Вертикальным Резонатором (VCSEL).
Модуль лазерного датчика может входить в состав детектора частиц, который может использоваться для определения качества воздуха. Такой детектор частиц может, например, быть встроен в мобильные устройства, в частности, устройства мобильной связи. Модуль лазерного датчика может являться отдельным устройством, которое может быть встроено, например, в мобильные устройства либо, по меньшей мере, часть функций модуля лазерного датчика может выполняться с помощью инфраструктуры, обеспечиваемой мобильным устройством. В частности, все функциональности блока оценки или их часть могут обеспечиваться с помощью одного или более процессоров мобильного устройства. Программный код может храниться в запоминающем устройстве мобильного устройства, чтобы обеспечивать, например, по меньшей мере, часть функциональностей блока оценки.
Модуль лазерного датчика содержит, по меньшей мере, одну первую область фокусирования. Первое относительное расстояние относится к расстоянию между первой областью фокусирования и частицей и расстоянию между первым лазером и первой областью фокусирования, которая определяется оптической характеристикой модуля лазерного датчика. Блок оценки выполнен с возможностью определения первого относительного расстояния на основе, по меньшей мере, одной характеристики первого интерференционного сигнала самосмешения, связанной с расстоянием между первой областью фокусирования и частицей, причем первая информация об амплитуде содержит максимальную или минимальную амплитуду первого интерференционного сигнала самосмешения.
Первая область фокусирования может содержать перетяжку луча внутри лазерного резонатора или в качестве альтернативы первую область фокусирования снаружи лазера. Перетяжка луча может использоваться в качестве первой области фокусирования в тех случаях, в которых модуль лазерного датчика расположен таким образом, что частицы пересекают первый лазерный луч вблизи выходного окна первого лазера, а именно, вблизи поверхности одного из зеркал, образующих первый лазерный резонатор. Относительное расстояние может в этом случае представлять собой расстояние между перетяжкой луча и выходным окном.
Модуль лазерного датчика может в качестве альтернативы или помимо этого содержать, по меньшей мере, одно первое оптическое устройство для фокусирования первого лазерного света в первой области фокусирования. Предлагаемый способ позволяет определять размер частицы, даже если частица находится не в фокусе. Расстояние между первой областью фокусирования и частицей называется расфокусированием. Относительное расстояние между первым лазером и частицей задается в этом случае суммой расстояния между первым лазером и первой областью фокусирования и расстояния между первой областью фокусирования и частицей (необходимо учитывать алгебраический знак). Величина расфокусирования (т.е., кривизна волнового фронта в совокупности с расширением амплитуды луча) первого лазерного света в точке частицы может вычисляться с помощью информации от первого оптического устройства, используемого в системе. Первое оптическое устройство может содержать одну линзу, но также и две, три или более линз или линзовых узлов. Кроме того, в таком первом оптическом устройстве может использоваться линза с адаптируемым фокусированием. Первая область фокусирования может быть точечной, но может в качестве альтернативы также содержать заданную глубину фокусирования. Диаметр или в более общем смысле поперечное сечение фокуса может, например, быть практически постоянным в течение заданного периода вдоль оптической оси первого лазера и первого оптического устройства. Первая область фокусирования может, например, иметь круглое или эллиптическое поперечное сечение.
Указанная, по меньшей мере, одна характеристика первого интерференционного сигнала самосмешения, связанная с расстоянием между первой областью фокусирования и частицей, содержит фазовую информацию, число колебаний, число относительных максимумов или минимумов, соотношение амплитуд относительных максимумов и минимумов, число переходов через ноль в заданном интервале первого интерференционного сигнала самосмешения, одно или более расстояний между переходами через ноль и формы огибающей первого интерференционного сигнала самосмешения. Первое относительное расстояние, а именно, относительное расстояние между первым лазером и частицей оказывает сильное влияние на характеристики или форму колебаний первого интерференционного сигнала самосмешения. Фазовая информация, число колебаний, число относительных максимумов или минимумов, соотношение амплитуд относительных максимумов и минимумов, число переходов через ноль в заданном интервале первого интерференционного сигнала самосмешения, одно или более расстояний между переходами через ноль и форма огибающей первого интерференционного сигнала самосмешения извлекаются из заданной части первого интерференционного сигнала самосмешения. Число колебаний и/или неодинаковый временной интервал переходов через ноль первого интерференционного сигнала самосмешения могут использоваться для определения размера частицы. Размер части первого интерференционного сигнала самосмешения может зависеть от абсолютного максимума амплитуды и уровня шума первого интерференционного сигнала самосмешения. Подгонка к теоретически ожидаемому поведению интенсивности для частицы, которая движется относительно пространственного поля расфокусирования, должно дать достаточную информацию с целью определения размера частицы. Измеренный первый интерференционный сигнал самосмешения может быть подогнан к теоретически ожидаемой кривой, причем может использоваться, по меньшей мере, одно из фазовой информации, числа колебаний, числа относительных максимумов или минимумов, соотношения амплитуд относительных максимумов и минимумов, числа переходов через ноль в заданном интервале первого интерференционного сигнала самосмешения, одного или более расстояний между переходами через ноль и формы огибающей первого интерференционного сигнала самосмешения. Вейвлет-анализ или нейронные сети с соответствующим образом адаптированными алгоритмами могут использоваться с целью выполнения подгонки измеренного первого интерференционного сигнала самосмешения.
Блок оценки может быть выполнен с возможностью определения абсолютного максимума или минимума амплитуды первого сигнала для первого интерференционного сигнала самосмешения. Блок оценки может быть выполнен с возможностью определения первого числа относительных максимумов или минимумов первого интерференционного сигнала самосмешения в заданном диапазоне около абсолютного максимума или минимума первого интерференционного сигнала самосмешения. Блок оценки может быть выполнен с возможностью определения первого относительного расстояния до частицы с помощью числа максимумов или минимумов первого интерференционного сигнала самосмешения в заданном диапазоне. Блок оценки может быть дополнительно выполнен с возможностью определения размера частицы с помощью определенного первого относительного расстояния до частицы и абсолютного максимума или минимума амплитуды первого сигнала для первого интерференционного сигнала самосмешения.
Первый интерференционный сигнал самосмешения может содержать обычную доплеровскую частоту, фазу вследствие оптического пути между первым лазером и частицей (это также может быть обусловлено внеосевым вращением луча, которое может быть вызвано, например, сканирующим зеркалом) и профиль пространственной фазы ввиду расфокусирования луча. Профиль пространственной фазы используется с целью определения размера частицы. Прочие эффекты, такие как, например, доплеровская частота, либо могут определяться с помощью альтернативного измерения, либо их влияние может быть пренебрежимо малым, например, в том смысле, что доплеровская частота ниже, чем частота из-за влияния расфокусирования. Это может, например, достигаться быстрым перемещением пятна или вынужденным быстрым перемещением частиц перпендикулярно лучу первого лазерного света по сравнению со скоростью параллельно лучу первого лазерного света.
Блок оценки может быть выполнен с возможностью уточнения определения первого относительного расстояния до частицы на основе соотношения между абсолютным максимумом амплитуды первого сигнала для первого интерференционного сигнала самосмешения и амплитудой первого интерференционного сигнала самосмешения, по меньшей мере, в одном из относительных максимумов первого интерференционного сигнала самосмешения, либо на основе соотношения между абсолютным минимумом амплитуды первого сигнала для первого интерференционного сигнала самосмешения и амплитудой первого интерференционного сигнала самосмешения, по меньшей мере, в одном из относительных минимумов первого интерференционного сигнала самосмешения. Относительные максимумы или минимумы первого интерференционного сигнала самосмешения могут непосредственно использоваться с целью определения спада сигнала относительно измеренных относительных максимумов или минимумов. В качестве альтернативы, относительные максимумы и минимумы в совокупности с относительными максимумами и минимумами интерференционного сигнала самосмешения могут использоваться для моделирования или подгонки функции огибающей к измеренным сигналам, что математически описывает спад сигнала. Спад первого интерференционного сигнала самосмешения может анализироваться в диапазоне около абсолютного максимума или минимума, в котором сигнал выше, чем уровень шума интерференционного сигнала самосмешения.
Модуль лазерного датчика может быть выполнен с возможностью обеспечения заданного распределения скоростей группы частиц, содержащей частицы, по отношению к первой области фокусирования. Заданное распределение скоростей может, например, обеспечиваться с помощью вентилятора. Вентилятор может, например, прогонять газ, содержащий частицы, в трубе с целью обеспечения заданного распределения скоростей. Заданное распределение скоростей может в качестве альтернативы или дополнительно представлять собой относительное распределение скоростей по отношению к лучу первого лазерного света, которое может быть вызвано движущимся зеркалом, отражающим первый лазерный свет.
Электрический возбудитель может быть выполнен с возможностью выдачи модулированного первого тока возбуждения в первый лазер. Блок оценки может быть выполнен с возможностью определения первого относительного расстояния до частицы на основе первого интерференционного сигнала самосмешения, возникающего в результате первого модулированного тока возбуждения. Модулированный ток возбуждения может, например, содержать треугольный или прямоугольный ток возбуждения. Первое относительное расстояние, определяемое с помощью модулированного тока возбуждения, может использоваться с целью вычисления или определения расфокусирования первого интерференционного сигнала самосмешения, вызываемого относительным положением частицы относительно первой области фокусирования. Фазовая информация, число колебаний, число относительных максимумов или минимумов, соотношение амплитуд относительных максимумов и минимумов, число переходов через ноль в заданном интервале первого интерференционного сигнала самосмешения, одно или более расстояний между переходами через ноль и форма огибающей первого интерференционного сигнала самосмешения могут использоваться дополнительно с целью определения относительного расстояния или расфокусирования таким образом, что размер частицы может определяться с учетом первой информации о амплитуде. Модулированный первый ток возбуждения может содержать, по меньшей мере, первую схему возбуждения и вторую схему возбуждения, причем первая схема возбуждения отличается от второй схемы возбуждения. Кроме того, существует возможность использования модулированного первого тока возбуждения и немодулированного первого тока возбуждения поочередно таким образом, что различные механизмы определения расстояния до частицы и тем самым расфокусирования могут использоваться с целью повышения точности.
Треугольный ток возбуждения является возможностью добавить постоянную частоту к первому интерференционному сигналу самосмешения. FM-методы могут использоваться для определения размера частиц, который содержится в первом интерференционном сигнале самосмешения в виде фазовой модуляции и амплитуды. Кроме того, расстояние частицы от лазера также содержится в постоянной частоте, обеспечиваемой треугольным током возбуждения, и может использоваться в качестве дополнительной информации.
При использовании модуляции прямоугольными импульсами могут быть получены две квадратурные составляющие сигнала частицы. Прямоугольный или квадратно-волновой ток возбуждения таков, что вынужденный сдвиг длины волны первого лазера приводит к 90-градусному фазовому сдвигу обратнорассеянного света в первом лазере. При наличии двух квадратурных составляющих всегда может быть восстановлена максимальная амплитуда сигнала частицы. Недостаток этого решения может состоять в том, что отношение сигнал-шум (SNR) первого интерференционного сигнала самосмешения уменьшается на 3 дБ, поскольку для восстановления квадратуры используется половина мощности сигнала.
Модуль лазерного датчика может содержать первое подвижное зеркало для перенаправления первого лазерного света. Модуль лазерного датчика может быть выполнен с возможностью управления перемещением первого подвижного зеркала таким образом, что определение размера частиц ниже заданного порога размера может быть исключено.
Диапазон частот первого интерференционного сигнала самосмешения зависит от относительной скорости частицы и луча первого лазерного света. Более высокая скорость означает сигнал большего диапазона, сигнал большего диапазона означает меньшее отношение сигнал-шум (SNR). Амплитуда сигнала частицы для первого интерференционного сигнала самосмешения зависит от размера частицы. Меньший размер частицы означает меньшую амплитуду (когда диаметр частицы меньше длины волны). За счет изменения относительной скорости таким образом, что SNR небольших частиц ниже предела определения, будут подсчитываться только более крупные частицы. Это позволяет извлекать из статистики числа частиц в зависимости от скорости зеркала информацию о размере частиц. Необходимо учитывать, что для повышенной относительной скорости измеряемый объем в единицу времени также возрастает, и статистику подсчета необходимо корректировать.
Модуль лазерного датчика может содержать, по меньшей мере, второй лазер и, по меньшей мере, второй детектор. Второй лазер может быть выполнен с возможностью излучения второго лазерного света. Второй лазерный свет может иметь вторую длину волны, отличающуюся от первой длины волны первого лазерного света. Второй детектор может быть выполнен с возможностью определения второго интерференционного сигнала самосмешения оптической волны во втором лазерном резонаторе второго лазера. Второй интерференционный сигнал самосмешения возникает из-за второго отраженного лазерного света, повторно входящего во второй лазерный резонатор, причем второй отраженный лазерный свет отражается частицей, принимающей, по меньшей мере, часть второго лазерного света. Блок оценки может быть выполнен с возможностью уточнения определения размера частицы путем определения второго относительного расстояния между частицей и вторым лазером с помощью второго интерференционного сигнала самосмешения.
Один и тот же размер частицы будет иметь отклик различной интенсивности сигнала ввиду различных длин волн. Эта дополнительная информация может комбинироваться с информацией о расстоянии и информацией об интенсивности сигнала. Различие в отклике для различной длины волны может использоваться в качестве дополнительной отличительной характеристики размера частиц. Первый лазер и второй лазер могут иметь более или менее перекрывающиеся профили лучей, в результате чего может оказаться возможным определение совпадений частицы с помощью первого лазера и второго лазера. В качестве альтернативы, первый лазер и второй лазер могут иметь неперекрывающиеся лучи, при этом информация может сравниваться или анализироваться с помощью статистических способов.
Модуль лазерного датчика может содержать, по меньшей мере, одно первое оптическое устройство для фокусирования первого лазерного света в первой области фокусирования. Модуль лазерного датчика может содержать, по меньшей мере, второй лазер, по меньшей мере, второй детектор и, по меньшей мере, одно второе оптическое устройство для фокусирования второго лазерного света, излучаемого вторым лазером, во второй области фокусирования. Второй детектор может быть выполнен с возможностью определения второго интерференционного сигала самосмешения оптической волны во втором лазерном резонаторе второго лазера. Второй интерференционный сигнал самосмешения возникает из-за второго отраженного лазерного света, повторно входящего во второй лазерный резонатор, причем второй отраженный лазерный свет отражается частицей, принимающей, по меньшей мере, часть второго лазерного света. Блок оценки может быть выполнен с возможностью уточнения определения размера частицы путем определения второго относительного расстояния между частицей и вторым лазером с помощью второго интерференционного сигнала самосмешения.
Размер первой и второй областей фокусирования может быть различным (различные фокусные расстояния, различный размер фокуса и т.д.). Точка относительно четкого первого фокуса может обеспечиваться с помощью первого лазера в совокупности с первым оптическим устройством, а линия второго фокуса может обеспечиваться с помощью второго лазера в совокупности со вторым оптическим устройством, причем точка первого фокуса может, например, быть расположена на линии второго фокуса. Линия второго фокуса может быть расположена вдоль оптической оси второго лазера. Первое расстояние между первым лазером и первой областью фокусирования может отличаться от второго расстояния между вторым лазером и второй областью фокусирования. Первая область фокусирования может не перекрываться со второй областью фокусирования, как описано выше.
В соответствии с еще одним аспектом, предлагается способ определения размера частиц. Способ включает в себя этапы:
- излучения первого лазерного света с помощью первого лазера,
- приема в первом лазерном резонаторе первого лазера первого отраженного лазерного света, отражаемого частицей, принимающей, по меньшей мере, часть первого лазерного света,
- определения первого интерференционного сигнала самосмешения оптической волны в первом лазерном резонаторе первого лазера, причем первый интерференционный сигнал самосмешения возникает из-за первого отраженного лазерного света, повторно входящего в первый лазерный резонатор,
- определения размера частицы путем определения первого относительного расстояния между частицей и первым лазером с помощью первого интерференционного сигнала самосмешения и путем определения первой информации об амплитуде с помощью первого интерференционного сигнала самосмешения.
Этапы способа не обязательно выполняются в порядке, указанном выше.
В соответствии с еще одним аспектом, предлагается компьютерный программный продукт. Компьютерный программный продукт содержит средства кода, которые могут быть сохранены, по меньшей мере, на одном запоминающем устройстве модуля лазерного датчика по любому из п. 1-11 или, по меньшей мере, на одном запоминающем устройстве устройства, содержащего модуль лазерного датчика. Средства кода выполнены таким образом, что способ по п. 13 может осуществляться с помощью, по меньшей мере, одного устройства обработки модуля лазерного датчика по любому из п. 1-11 или с помощью, по меньшей мере, одного устройства обработки устройства, содержащего модуль лазерного датчика. Запоминающее устройство или устройство обработки может входить в состав модуля лазерного датчика (например, электрического возбудителя, блока оценки и т.д.) или устройства, содержащего модуль лазерного датчика. Первое запоминающее устройство и/или первое устройство обработки устройства, содержащего модуль лазерного датчика, может взаимодействовать со вторым запоминающим устройством и/или вторым устройством обработки, входящим в состав модуля лазерного датчика.
Следует понимать, что модуль лазерного датчика по любому из п. 1-11 и способ по п. 13 имеют аналогичные и/или идентичные варианты осуществления, в частности, как определено в зависимых пунктах формулы изобретения.
Следует понимать, что предпочтительный вариант осуществления изобретения может также представлять собой любую комбинацию зависимых пунктов формулы изобретения с соответствующим независимым пунктом.
Дополнительные предпочтительные варианты осуществления определены ниже.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Указанные и прочие аспекты изобретения будут понятны из описываемых ниже вариантов осуществления и объяснены применительно к ним.
Далее изобретение описывается в качестве примера на основе вариантов осуществления со ссылкой на прилагаемые чертежи.
На чертежах:
на фиг. 1 изображена принципиальная схема модуля первого лазерного датчика,
на фиг. 2 изображена принципиальная схема модуля второго лазерного датчика,
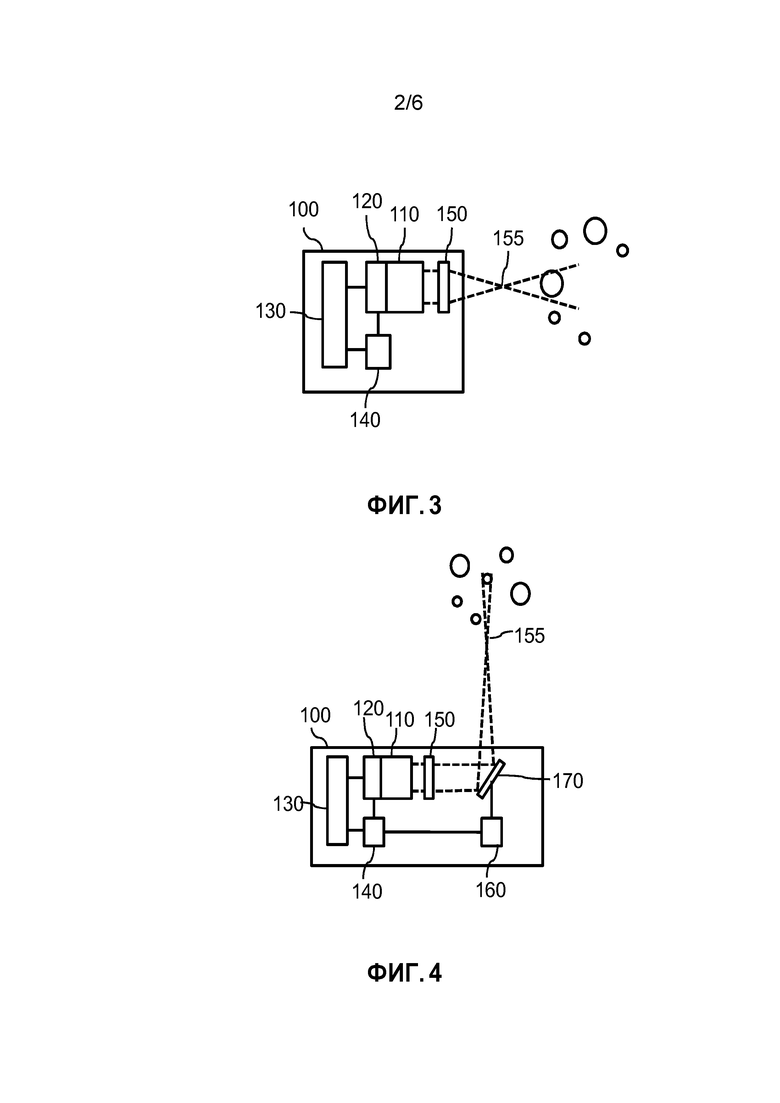
на фиг. 3 изображена принципиальная схема модуля третьего лазерного датчика,
на фиг. 4 изображена принципиальная схема модуля четвертого лазерного датчика,
на фиг. 5 изображена принципиальная схема первой области фокусирования,
на фиг. 6 изображена принципиальная схема модуля пятого лазерного датчика,
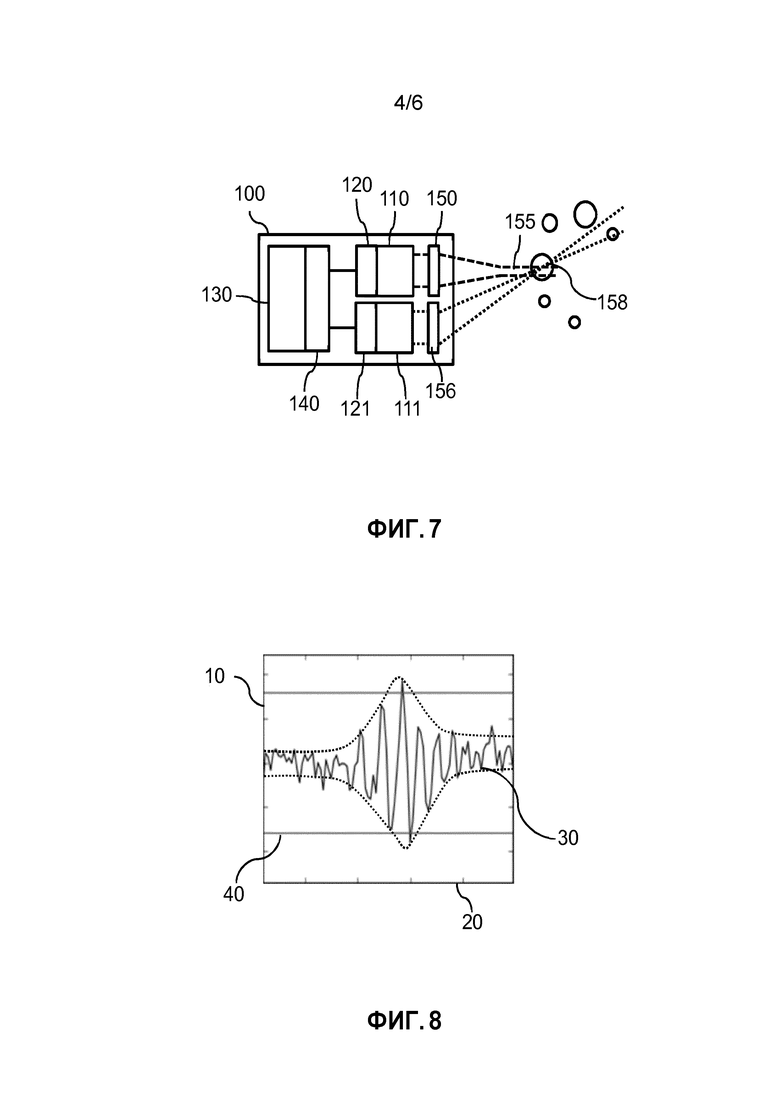
на фиг. 7 изображена принципиальная схема модуля шестого лазерного датчика,
на фиг. 8 изображен первый вариант осуществления первого интерференционного сигнала самосмешения,
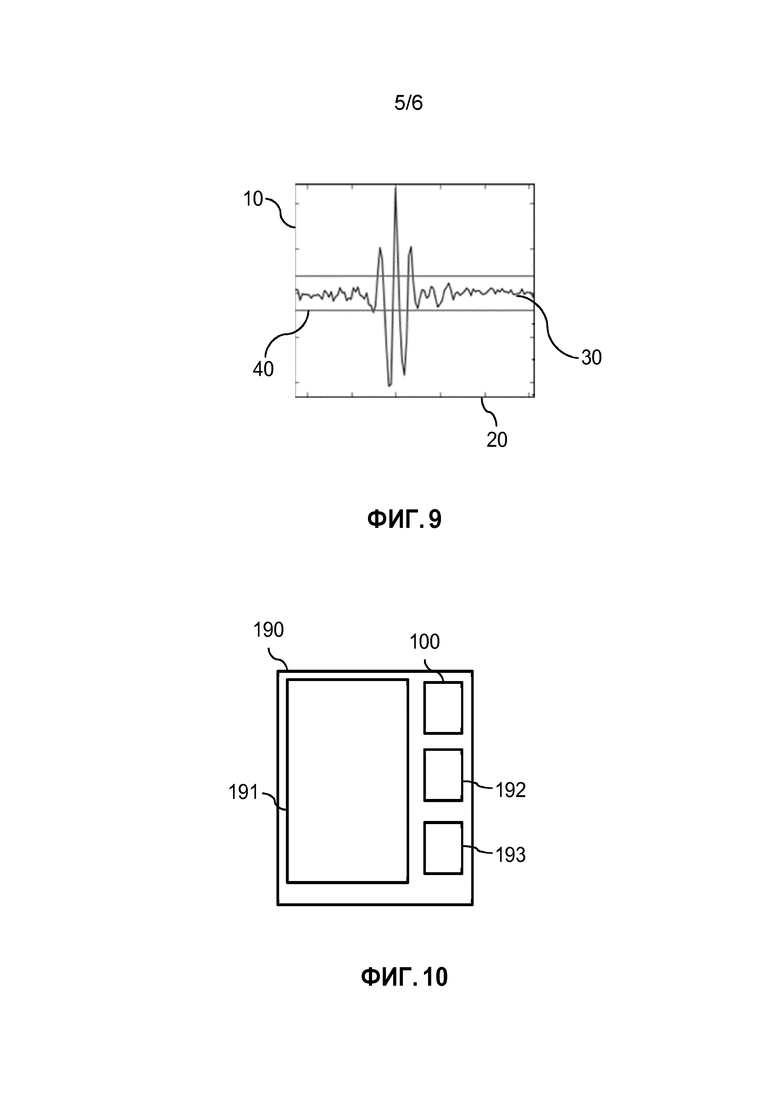
на фиг. 9 изображен второй вариант осуществления первого интерференционного сигнала самосмешения,
на фиг. 10 изображено устройство мобильной связи, содержащее модуль лазерного датчика,
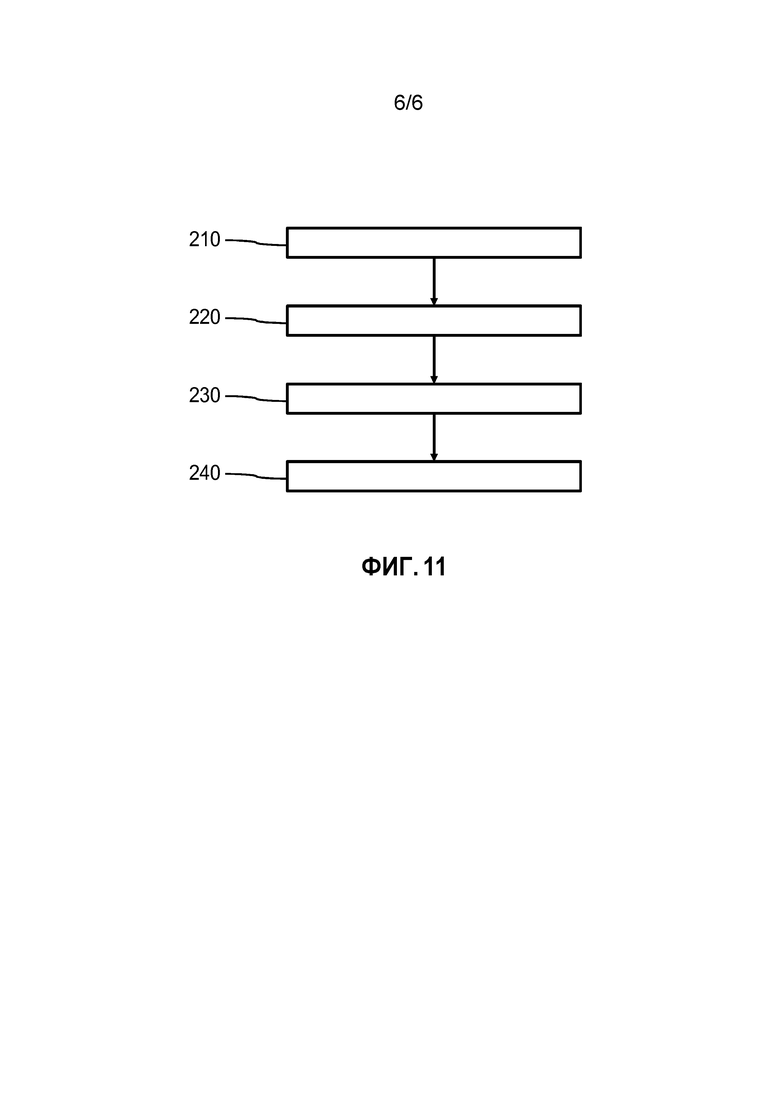
на фиг. 11 изображена принципиальная схема способа определения размера частиц.
Повсюду на чертежах одинаковые номера обозначают одинаковые объекты. Объекты на чертежах не обязательно выполнены в масштабе.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Далее с помощью чертежей описываются различные варианты осуществления изобретения.
Интерференция самосмешения используется для обнаружения перемещения объекта и расстояния до него. Дополнительная информация по интерференции самосмешения описывается в работах «Метод самосмешения лазерного диода для применения при зондировании», Giuliani, G.; Norgia, M.; Donati, S. и Bosch, T., Метод самосмешения лазерного диода для применения при зондировании, Journal of Optics A: Pure and Applied Optics, 2002, 4, с. 283-294, которые включены путем ссылки. Обнаружение движения кончика пальца относительно датчика в оптическом устройстве ввода подробно описывается в Международной заявке на патент № WO 02/37410. Описание в отношении обнаружения расстояния и перемещения в Международной заявке на патент № WO 02/37410 включено путем ссылки.
Принцип интерференции самосмешения рассматривается на примерах, приведенных в Международной заявке на патент № WO 02/37410. Диодный лазер, имеющий лазерный резонатор, предусматривается для излучения лазерного, или измерительного, луча. На своей верхней стороне устройство снабжено прозрачным окном, по которому перемещается объект, например, палец человека. Между диодным лазером и окном расположена линза, например, плоско-выпуклая линза. Эта линза фокусирует лазерный луч на верхней стороне прозрачного окна или вблизи него. Если в этом положении имеется объект, он рассеивает измерительный луч. Часть излучения измерительного луча рассеивается в направлении луча освещения, и эта часть сводится линзой на поверхности излучения лазерного диода и повторно входит в резонатор данного лазера. Излучение, повторно входящее в резонатор диодного лазера, вызывает изменение в коэффициенте усиления лазера и тем самым в интенсивности излучения, испускаемого лазером, и это именно то явление, которое называется эффектом самосмешения и диодном лазере.
Изменение в интенсивности излучения, испускаемого лазером, может обнаруживаться предусмотренным для этой цели фотодиодом, который преобразует изменение излучения в электрический сигнал, а для обработки этого электрического сигнала предусмотрены электронные схемы.
Перемещение объекта относительно измерительного луча приводит к тому, что отраженное им излучение претерпевает доплеровское смещение. Это означает, что частота данного излучения изменяется или что происходит смещение частоты. Это смещение частоты зависит от скорости, с которой перемещается объект, и составляет порядка от нескольких кГц до МГц. Излучение со смещением частоты, повторно входящее в лазерный резонатор, интерферирует с оптической волной или излучением, генерируемым в данном резонатор, т.е., в данном резонаторе возникает эффект самосмешения. В зависимости от величины фазового сдвига между оптической волной и излучением, повторно входящим в резонатор, интерференция является усиливающей или отрицательной, т.е., интенсивность лазерного излучения периодически увеличивается или уменьшается. Частота модуляции лазерного излучения, генерируемого таким образом, в точности равна разности между частотой оптической волны в резонаторе и частотой излучения с доплеровским смещением, повторно входящего в резонатор. Разность частот составляет порядка от нескольких кГц до МГц и вследствие этого легко обнаружима. Комбинация эффекта самосмешения и доплеровского смещения вызывает изменение поведения лазерного резонатора; в частности, изменяется его коэффициент усиления или усиление света. Импеданс лазерного резонатора или интенсивность излучения, испускаемого лазером, может, например, измеряться, при этом не только может оцениваться величина перемещения объекта относительно датчика (т.е., пройденное расстояние), но и может определяться направление перемещения, как подробно описано в Международной заявке на патент № WO 02/37410.
На фиг. 1 изображена принципиальная схема модуля 100 первого лазерного датчика. Модуль первого лазерного датчика содержит первый лазер 110 с интегральным первым детектором 120. Интегральный первый детектор 120 представляет собой интегральный фотодиод, который составляет часть многослойной структуры первого лазера 110. Интегральный фотодиод определяет колебания оптической волны в первом лазерном резонаторе первого лазера. Модуль 100 первого лазерного датчика дополнительно содержит электрический возбудитель 130 и блок 140 оценки. Блок 140 оценки соединен с первым лазером или, точнее, с первым детектором 120 и электрическим возбудителем 130. Электрический возбудитель 130 подает электропитание в первый лазер 110 с целью излучения первого лазерного света. Первый лазер 110 представляет собой в этом случае Лазер Поверхностного Излучения с Вертикальным Резонатором (VCSEL) с интегральным фотодиодом. Модуль 100 лазерного датчика соединен с источником питания (не показан), выдающим питание, которое модулируется и подается с помощью электрического возбудителя 130. Электрический возбудитель 130 выдает порядок чередования различных схем модуляции в первый лазер 110. Постоянный ток обеспечивается в первой схеме модуляции. Ток возбуждения с треугольной схемой модуляции обеспечивается во второй схеме модуляции. Треугольная схема модуляции используется для определения относительного расстояния между первым лазером 110 и частицей с помощью первого интерференционного сигнала 30 самосмешения. Блок 140 оценки принимает выдаваемые первым детектором 120 электрические сигналы, которые возникают в результате первого интерференционного сигнала 30 самосмешения. Блок 140 оценки дополнительно принимает информацию в отношении схемы возбуждения от электрического возбудителя 130. Блок 140 оценки активизируется с помощью этой информации для определения относительного расстояния между первым лазером 110 и первой информацией об амплитуде. Могут предусматриваться дополнительные детекторы с целью определения первого лазерного света, который рассеивается частицей под различными углами рассеивания. Дополнительный детектор или детекторы могут использоваться для улучшения определения размера частиц. Рассеянный свет для различного размера частиц имеет угловую зависимость. Использование дополнительного детектора в совокупности с первым интерференционным сигналом 30 самосмешения обеспечивает улучшенную оценку размера частиц с помощью блока 140 оценки. Определение совпадений в сигнале, выдаваемом дополнительным детектором, и первом интерференционном сигнале 30 самосмешения может обеспечиваться с помощью блока 140 оценки.
На фиг. 2 изображена принципиальная схема модуля 100 второго лазерного датчика. Модуль 100 второго лазерного датчика содержит первый лазер 110. Второй детектор 120 установлен в качестве внешней измерительной схемы, которая определяет напряжение на первом лазерном резонаторе или, в более общем смысле, импеданс первого лазерного резонатора, который зависит от первого интерференционного сигнала самосмешения. Модуль 100 первого лазерного датчика дополнительно содержит электрический возбудитель 130 и блок 140 оценки. Блок 140 оценки соединен с первым лазером 110, первым детектором 120 и электрическим возбудителем 130. Электрический возбудитель 130 подает электропитание в первый лазер 110 с целью излучения первого лазерного света. Первый лазер 110 представляет собой в этом случае полупроводниковый лазер торцевого излучения. Модуль 100 лазерного датчика соединен с источником питания (не показан), выдающим питание, которое модулируется и подается с помощью электрического возбудителя 130. Электрический возбудитель 130 выдает постоянный ток возбуждения. Блок 140 оценки принимает выдаваемые первым детектором 120 электрические сигналы, которые возникают в результате первого интерференционного сигнала 30 самосмешения. Блок 140 оценки принимает информацию от электрического возбудителя 130. Блок 140 оценки дополнительно принимает информацию о температуре от первого лазерного устройства. Блок 140 оценки активизируется с помощью этой информации для определения относительного расстояния между первым лазером 110 и первой информацией об амплитуде. Частицы, которые проходят относительно далеко не в фокусе, имеют достаточно видимое колебание в первом интерференционном сигнале самосмешения для надежного определения его положения и, следовательно, размера частиц ввиду постоянного тока возбуждения. Преимущество этой схемы модуляции состоит в том, что она использует полную мощность сигнала для реконструкции только одной квадратуры сигнала, что дает наилучшее SNR для обнаружения мельчайших частиц.
На фиг. 3 изображена принципиальная схема модуля 100 третьего лазерного датчика. Модуль третьего лазерного датчика содержит первый лазер 110 с интегральным первым детектором 120. Интегральный первый детектор 120 представляет собой интегральный фотодиод, который составляет часть многослойной структуры первого лазера 110. Модуль 100 первого лазерного датчика дополнительно содержит электрический возбудитель 130, блок 140 оценки и первое оптическое устройство 150. Блок 140 оценки соединен с первым лазером 110 или, точнее, с первым детектором 120 и электрическим возбудителем 130. Электрический возбудитель 130 подает электропитание в первый лазер 110 с целью излучения первого лазерного света. Первый лазер 110 представляет собой в этом случае Лазер Поверхностного Излучения с Вертикальным Резонатором (VCSEL) с интегральным фотодиодом. Модуль 100 лазерного датчика соединен с источником питания (не показан), выдающим питание, которое модулируется и подается с помощью электрического возбудителя 130. Электрический возбудитель 130 выдает постоянный ток возбуждения. Блок 140 оценки принимает выдаваемые первым детектором 120 электрические сигналы, которые возникают в результате первого интерференционного сигнала 30 самосмешения. Блок 140 оценки дополнительно принимает информацию от электрического возбудителя 130. Блок 140 оценки активизируется с помощью этой информации для определения относительного расстояния между первым лазером 110 и первой информацией об амплитуде. Первый лазерный свет, излучаемый первым лазером 110, фокусируется с помощью первого оптического устройства 150 в первой области 155 фокусирования. Частица может детектироваться в диапазоне около первой области 155 фокусирования. Расстояние между первой областью 155 фокусирования и частицей называется расфокусированием. Расфокусирование влияет на первый интерференционный сигнал 30 самосмешения и обеспечивает информацию для определения относительного расстояния между первым лазером 110 и частицей. Эта информация в совокупности с первой информацией об амплитуде используется с помощью блока 140 оценки с целью определения размера частицы.
Первое оптическое устройство 150 может, например, содержать одну линзу с заданным диаметром rlens. Первый интерференционный сигнал 30 самосмешения пересчитывается в виде exp[-(rlens/wpupil)^2])^2, где wpupil - параметр перетяжки гауссовского луча первого лазерного света на зрачке линзы. Линза должна иметь некоторый минимальный диаметр, чтобы исключить потери сигнала из-за виньетирования обратнорассеянного или отраженного луча первого лазерного света. Предпочтительный вариант осуществления должен иметь диаметр линзы > 1,1 диаметра зрачка (это соответствует потерям сигнала величиной 3 дБ). Еще лучше, если бы линза была > 1,5 диаметра зрачка гауссовского луча (потери сигнала величиной 1 дБ).
Подробности теоретических основ определения размера частицы описываются в следующих ниже абзацах.
Изменение мощности в первом лазерном резонаторе первого лазера 110 из-за обратнорассеянного или отраженного от частицы первого лазерного света может описываться следующей формулой.
Дельта P/P - относительное изменение мощности интенсивности лазерного излучения оптической волны в первом лазерном резонаторе из-за обратнорассеянного от частицы света, E_(laser)(x,y,z) - лазерное поле в положении частицы, |E_bs| относится к обратнорассеянному от частицы свету в обратном направлении, λ - длина волны, k - это 2π/λ, ϕ - результирующая фаза между обратнорассеянным светом и оптической волной в первом лазерном резонаторе. Эта фаза может нелинейно зависеть от амплитуды обратнорассеянного сигнала.
|E_bs| описывается следующей формулой
Здесь d сигма/d Омега - рассеянное поперечное сечение луча первого лазерного света для обратного направления. (Оно в данном случае предполагается постоянным в пределах угла приема лазерного луча.)
Общее выражение для интенсивности сигнала принимает вид

Первая часть уравнения описывает амплитуду сигнала, а последний член - его фазу. Ilaser - интенсивность лазерного луча в положении (x,y,z) сигнала.
Эта фаза определяется расстоянием от первого лазера 110 до частицы и по фазе падающего лазерного луча первого лазерного света, поскольку хорошо известна в интерферометрах. Для модуля 100 лазерного датчика, использующего интерференцию самосмешения со сканирующим пятном или движущейся частицей в поперечном направлении, в частности, в зависимости от поперечных компонентов поля представляют интерес x, y. Для гауссовского луча первого лазерного света это описывается следующим уравнением.

Е0 – электрическое поле лазера. ς - зависящий от местоположения масштабный коэффициент, который может влиять на фазовый сдвиг (так называемый фазовый фактор Гуи).
Фаза в z=постоянная плоскость, она определяется величиной расфокусирования луча первого лазерного света, который может параметризоваться R(z).

Амплитуда луча в постоянной плоскости z представляет собой гауссиан, определяемый своей перетяжкой луча, параметризованной w(z).
При этом z_r представляет собой рэлеевскую область,  . W0 - перетяжка луча.
. W0 - перетяжка луча.
Первая часть гауссовского луча дает амплитудную зависимость, а часть сложной показательной функции - фазовый профиль луча.
Этот гауссовский профиль луча может быть вставлен в уравнение для мощности лазера (могут быть вставлены и другие профили лазерного луча).
В результате

I0 - интенсивность сигнала лазера.
В нескольких словах о фазовом члене можно сказать, что относительное перемещение по z частицы и лазера соответствует доплеровскому смещению фазы, а относительное перемещение по x,y - смещению фазы из-за расфокусирования.
Когда траектория частицы относительно фокуса известна, данное уравнение описывает наблюдаемое колебание интенсивности лазера. Основной неизвестной величиной является  , которая зависит от размера частицы (и ее диэлектрических свойств, однако, как правило, оптические счетчики частиц предполагают, что поперечное сечение (
, которая зависит от размера частицы (и ее диэлектрических свойств, однако, как правило, оптические счетчики частиц предполагают, что поперечное сечение ( ) рассеивания коррелирует с размером частиц, и предполагают, что диэлектрические свойства различных частиц одинаковы), когда все остальные параметры известны, поперечное сечение обратного рассеивания может определяться по измеряемому сигналу.
) рассеивания коррелирует с размером частиц, и предполагают, что диэлектрические свойства различных частиц одинаковы), когда все остальные параметры известны, поперечное сечение обратного рассеивания может определяться по измеряемому сигналу.
Либо перемещение частиц может быть незначительным, либо может предусматриваться предварительно определенная траектория частиц. Одним из вариантов может являться использование управляемого воздушного потока. Еще одним вариантом является использование сканирующего пятна, например, с помощью МЭМС-зеркала, как описывается на фиг. 4, вместе с предположением о том, что перемещение частиц значительно меньше, чем перемещение пятна. Сканирующее пятно также гарантирует, что относительное расстояние между частицей и первым лазером во время его траектории известно.
В том случае, когда частица и лазерное пятно имеют вполне определенную поперечную относительную скорость, а зависимостью по z можно пренебречь, либо с помощью сканирующего зеркала, которое перемещает лазерное пятно, либо с помощью управляемого воздушного потока, который перемещает частицу, фаза обратнорассеянного света будет изменяться из-за члена расфокусирования. Это изменение фазы приводит к колебанию первого интерференционного сигнала 30 самосмешения. Наряду с этим изменением фазы уменьшается амплитуда луча, приводя к более низкому сигналу частицы. Поскольку частица выходит из фокуса, член колебания фазы становится больше по сравнению с поперечным спадом (z_R - рэлеевская область).
 (лазерное поле фазы поперечной экспоненты)
(лазерное поле фазы поперечной экспоненты)
 (луч интенсивности поперечной экспоненты)
(луч интенсивности поперечной экспоненты)
 (соотношение двух)
(соотношение двух)
Это означает, что вне фокуса имеется больше колебаний сигнала частицы до того, как первый интерференционный сигнал 30 самосмешения спадает ниже уровня шума. Поэтому по величине колебаний в зависимости от спада сигнала можно определить положение частицы. Максимальная амплитуда сигнала спадает, поскольку вне фокуса максимальная интенсивность лазерного луча ниже.
Важно отметить, что с учетом амплитуды первого интерференционного сигнала 30 самосмешения и, например, величины периодов колебаний и их частоты можно определить расстояние от фокуса, а при использовании этой информации и максимальной амплитуды первого интерференционного сигнала 30 самосмешения - размер частиц. В качестве альтернативы или дополнительно могут использоваться переходы через ноль первого интерференционного сигнала 30 самосмешения и расстояние между переходами через ноль. Кроме того, огибающая первого интерференционного сигнала 30 самосмешения может моделироваться, а расстояние может определяться с помощью максимума и/или минимума огибающей и спада огибающей при условии, что огибающая находится выше уровня шума первого интерференционного сигнала 30 самосмешения.
На фиг. 4 изображена принципиальная схема модуля 100 четвертого лазерного датчика. Модуль четвертого лазерного датчика содержит первый лазер 110 с интегральным первым детектором 120. Модуль 100 первого лазерного датчика дополнительно содержит электрический возбудитель 130, блок 140 оценки, первое оптическое устройство 150 и контролер для управления подвижным зеркалом 170. Блок 140 оценки соединен с первым детектором 120, электрическим возбудителем 130 и контроллером 160. Электрический возбудитель 130 подает электропитание в первый лазер 110 с целью излучения первого лазерного света. Электрический возбудитель 130 выдает модулированный ток возбуждения (прямоугольный ток возбуждения). Блок 140 оценки принимает выдаваемые первым детектором 120 электрические сигналы, которые возникают в результате первого интерференционного сигнала 30 самосмешения. Блок 140 оценки дополнительно принимает информацию от электрического возбудителя 130 и контроллера 160 с целью интерпретации первого интерференционного сигнала 30 самосмешения, измеряемого первым детектором 120. Информация, выдаваемая электрическим возбудителем 130, может содержать амплитуду тока, выдаваемую в определенный момент времени. Информация, выдаваемая контроллером 160, может содержать угловую скорость, амплитуду перемещения зеркала и т.д. Блок 140 оценки активизируется с помощью этой информации для определения относительного расстояния между первым лазером 110 и первой информацией об амплитуде, как подробно описано выше. Первый лазерный свет, излучаемый первым лазером 110, фокусируется с помощью первого оптического устройства 150 в первой области 155 фокусирования. Частица может детектироваться в диапазоне около первой области 155 фокусирования, которая перемещается вдоль направления 175 сканирования (см., например, фиг. 5) благодаря подвижному зеркалу 170. Частица может обнаруживаться в некотором диапазоне около первой области 155 фокусирования. Расстояние между первой областью 155 фокусирования и частицей называется расфокусированием. Расфокусирование влияет на первый интерференционный сигнал 30 самосмешения и обеспечивает информацию для определения относительного расстояния между первым лазером 110 и частицей, как описано выше. Эта информация в совокупности с первой информацией об амплитуде используется с помощью блока 140 оценки с целью определения размера частицы, как описано выше.
Амплитуда сигнала частицы первого интерференционного сигнала 30 самосмешения представляет собой взаимосвязь между числовой апертурой сфокусированного пятна (или перетяжкой гауссовского луча) и перемещением подвижного зеркала 170. Сначала должен быть определен минимальный обнаруживаемый размер частиц. Это накладывает ограничение на максимальную мощность шума, которая после фильтрации может присутствовать в первом интерференционном сигнале 30 самосмешения. Как указано выше, относительная скорость пятна и частицы определяет диапазон частот сигнала. Когда скорость является низкой, выборочный объем воздуха является низким, увеличение скорости приводит к большему выборочному объему и, следовательно, к большему числу обнаруживаемых частиц. Кроме того, при более высокой скорости уменьшается SNR, но это не имеет значения при условии, что наименьший требуемый размер частиц все еще является определимым. Форма лазерного луча также оказывает влияние на выборочный объем воздуха; гауссовский луч с большой перетяжкой имеет больший диаметр и рэлеевскую область, давая в результате более значительную площадь поперечного сечения, чем луч с небольшой перетяжкой (более высокой числовой апертурой). Более значительная перетяжка также означает более низкий рассеиваемый сигнал, поскольку локальная интенсивность ниже. Это означает, что существует компромисс между числовой апертурой линзы, используемой для фокусирования луча, и относительной скоростью.
В случае, если перемещение воздуха не управляется, для перемещения пятна используется сканирующее зеркало. Может оказаться предпочтительным выбирать скорость выше, чем нормальные скорости воздуха - от 0,1 до 1 м/с. Поэтому было бы целесообразно иметь величину 5-20 м/с. В этом случае величина числовой апертуры фокусирующей линзы 0,05-0,2 была бы оптимальной, когда частицы свыше 300 нм должны быть обнаружимыми (числовая апертура задается с использованием значения интенсивности 1/e^2 углового размера дальнего поля гауссовского луча).
На фиг. 5 изображена принципиальная схема поперечного сечения первой области 155 фокусирования, которая движется поперек направления 175 сканирования благодаря подвижному зеркалу 170, как описано на фиг. 4. На поперечном сечении показан эллиптический фокус. Благодаря тому, что в фокусе выполнено эллиптическое пятно, чувствительность к расфокусированию может стать наибольшей вдоль короткой оси эллипса. При этом может оказаться предпочтительным установить направление 175 сканирования параллельным короткой оси эллипса. Данная форма пятна может быть выполнена с использованием пары анаморфических призм, либо с помощью цилиндрической линзы, либо с помощью, например, VCSEL с эллиптическим профилем режима.
На фиг. 6 изображена принципиальная схема модуля 100 пятого лазерного датчика. Модуль 100 пятого лазерного датчика содержит первый лазер 110 с интегральным первым детектором 120 и второй лазер 111 с интегральным вторым детектором 121. Первый лазер 110 излучает первый лазерный свет с первыми длинами волн, второй лазер 111 излучает второй лазерный свет со второй длиной волны. Вторая длина волны отличается от первых длин волн. Модуль 100 пятого лазерного датчика содержит электрический возбудитель 130, который выполнен с возможностью подачи тока возбуждения в первый лазер 110 и во второй лазер 111. Модуль 100 пятого лазерного датчика может содержать в альтернативном варианте осуществления дополнительный электрический возбудитель 130 для электрического возбуждения второго лазера 121. Модуль третьего лазерного датчика содержит блок 140 оценки. Блок 140 оценки соединен с первым лазером 110, вторым лазером 111 и электрическим возбудителем 130. Модуль 100 пятого лазерного датчика дополнительно содержит первое оптическое устройство 150 для фокусирования первого лазерного света в первой области 155 фокусирования. Модуль 100 пятого лазерного датчика дополнительно содержит второе оптическое устройство 156 для фокусирования второго лазерного света во второй области 158 фокусирования. Блок 140 оценки принимает выдаваемые первым детектором 120 электрические сигналы, которые возникают в результате первого интерференционного сигнала 30 самосмешения, и электрические сигналы, выдаваемые вторым детектором 121, которые возникают в результате второго интерференционного сигнала самосмешения. Блок 140 оценки дополнительно принимает информацию от электрического возбудителя 130. Блок 140 оценки активизируется с помощью этой информации для определения относительного расстояния между первым лазером 110 и первой информацией об амплитуде. Блок 140 оценки дополнительно активизируется с помощью этой информации для определения относительного расстояния между вторым лазером 111 и второй информацией об амплитуде. Размер частицы может определяться с помощью этой информации независимо от первого интерференционного сигнала 30 самосмешения. Блок 140 оценки дополнительно выполнен с возможностью оценки первого интерференционного сигнала 30 самосмешения и второго интерференционного сигнала самосмешения с помощью статистического анализа на основе теоретической модели движения частиц или на основе информации о движения частиц, которое может быть вызвано, например, вентилятором внутри трубы, которая либо прозрачна по отношению к свету первого и второго лазера, либо может иметь окно (не показано).
На фиг. 7 изображена принципиальная схема модуля 100 шестого лазерного датчика. Модуль 100 шестого лазерного датчика содержит первый лазер 110 с интегральным первым детектором 120 и второй лазер 111 с интегральным вторым детектором 121. Первый лазер 110 и второй лазер 111 излучают свет первого и второго лазеров с одинаковой длиной волны. Модуль 100 шестого лазерного датчика содержит электрический возбудитель 130, который выполнен с возможностью подачи тока возбуждения в первый лазер 110 и во второй лазер 111. Электрический возбудитель содержит блок 140 оценки, который соединен с первым лазером 110 и вторым лазером 111. Модуль 100 шестого лазерного датчика дополнительно содержит первое оптическое устройство 150 для фокусирования первого лазерного света в первой области 155 фокусирования. Модуль 100 шестого лазерного датчика дополнительно содержит второе оптическое устройство 156 для фокусирования второго лазерного света во второй области 158 фокусирования. Первая область 155 фокусирования проходит вдоль оптической оси первого лазера 110 и первого оптического устройства 150 и, следовательно, обеспечивает практически постоянную обратную связь в первый лазер 110 в пределах первой области 155 фокусирования. Вторая область 158 фокусирования имеет точку четкого фокуса. Первая область 155 фокусирования перекрывается со второй областью 158 фокусирования. Блок 140 оценки принимает выдаваемые первым детектором 120 электрические сигналы, которые возникают в результате первого интерференционного сигнала 30 самосмешения, и электрические сигналы, выдаваемые вторым детектором 121, которые возникают в результате второго интерференционного сигнала самосмешения. Блок 140 оценки дополнительно принимает информацию от электрического возбудителя 130. Блок 140 оценки активизируется с помощью этой информации для определения относительного расстояния между первым лазером 110 и первой информацией об амплитуде. Блок 140 оценки дополнительно активизируется с помощью этой информации для определения относительного расстояния между вторым лазером 111 и второй информацией об амплитуде. Размер частицы может определяться с помощью этой информации независимо от первого интерференционного сигнала 30 самосмешения. Область 155 линейного фокусирования или первого фокусирования первого лазера 110 дает приблизительно одинаковый первый интерференционный сигнал 30 самосмешения вдоль оптической оси первого лазера 110 и первого оптического устройства 150. По второму интерференционному сигналу самосмешения может быть определено положение вне фокуса, и, следовательно, с помощью блока 140 оценки можно установить, вызван ли первый интерференционный сигнал 30 самосмешения постоянной первой областью 155 фокусирования.
На фиг. 8 изображен первый вариант осуществления первого интерференционного сигнала 30 самосмешения. Представлен измеренный первый интерференционный сигнал 30 самосмешения частицы размером 600 нм. На вертикальной оси изображена ось 10 амплитуды, а на горизонтальной оси изображена ось 20 времени. Частица прошла вдали от фокуса, что вызвало довольно низкий первый интерференционный сигнал 30 самосмешения. В противоположность этому, амплитуда первого интерференционного сигнала 30 самосмешения, изображенного на фиг. 9, высока, поскольку частица измерялась в фокусе первого оптического устройства или вблизи него. Число колебаний в предварительно определенном временном интервале величиной 0,02 мс около максимальной (или минимальной) амплитуды на фиг. 8 выше по сравнению с числом колебаний в том же временном интервале около максимальной или минимальной амплитуды на фиг. 9. Кроме того, относительные максимумы амплитуд первого интерференционного сигнала 30 самосмешения на фиг. 8 спадают медленно по сравнению с фиг. 9. На практике шум будет задавать порог обнаружения, выше которого будет выделяться сигнал частицы. Размер частицы, главным образом, влияет на амплитуду первого интерференционного сигнала 30 самосмешения, а величина расфокусирования будет, главным образом, определять его протяженность во времени. Когда сигнал нормализован, та же величина вне фокуса приводит к той же форме сигнала независимо от произвольного фазового фактора (и членов коррекции, когда размером частиц можно пренебречь по отношению к размеру лазерного луча). Останется некоторая неопределенность в соотнесении амплитуды с размером частиц ввиду возможного сдвига перпендикулярно оптической оси первого лазера 110 и первого оптического устройства 150 (направлению y при сканировании луча в направлении х), но может быть определен средний размер частиц. Такие неопределенности могут быть уменьшены путем использования независимого детектора при различных углах рассеяния или путем использования двух, трех или более лазеров 110, 111 с соответствующими детекторами 120, 121.
На фиг. 10 изображено устройство 190 мобильной связи, содержащее модуль 100 лазерного датчика. Устройство 190 мобильной связи содержит пользовательский интерфейс 191, устройство 192 обработки и основное запоминающее устройство 193. Основное устройство 192 обработки соединено с основным запоминающим устройством 193 и с модулем 100 лазерного датчика. Основное устройство 192 обработки содержит, по меньшей мере, часть функциональностей блока 140 оценки, который описан выше. Основное устройство 192 обработки хранит данные, относящиеся к детектированию частиц, в основном запоминающем устройстве 193. В альтернативном варианте осуществления существует также возможность того, что основное устройство 192 обработки и основное запоминающее устройство 193 используются только для подготовки или адаптации данных, выдаваемых с помощью модуля 100 лазерного датчика, в результате чего данные могут быть представлены пользователю устройства 190 мобильной связи с помощью пользовательского интерфейса 191. Модуль 100 лазерного датчика запитывается с помощью источника питания устройства 190 мобильной связи.
На фиг. 11 изображена принципиальная схема способа определения размера частиц. На этапе 210 первый лазерный свет излучается с помощью первого лазера 110. На этапе 220 первый отраженный лазерный свет, который отражается частицей, принимающей, по меньшей мере, часть первого лазерного света, отражается в первом лазерном резонаторе первого лазера 110. Первый интерференционный сигнал 30 самосмешения оптической волны в первом лазерном резонаторе первого лазера 110 обнаруживается на этапе 230. Первый интерференционный сигнал 30 самосмешения возникает из-за первого отраженного лазерного света, повторно входящего в первый лазерный резонатор. Размер частицы определяется на этапе 240 путем определения первого относительного расстояния между частицей и первым лазером 110 с помощью первого интерференционного сигнала 30 самосмешения и путем определения первой информации об амплитуде с помощью первого интерференционного сигнала 30 самосмешения.
Основная идея настоящего изобретения состоит в использовании информации о расстоянии и амплитуде интерференционных сигналов самосмешения для определения размеров частиц. В частности, форма интерференционного сигнала самосмешения в пределах заданного периода около максимума или минимума интерференционного сигнала самосмешения обеспечивает информацию, которая может использоваться для определения размеров частиц.
Несмотря на то, что изобретение подробно иллюстрировано и описано на чертежах и в вышеизложенном описании, такое иллюстрирование и описание следует считать наглядными или иллюстративными, а не ограничительными.
По результатам прочтения настоящего описания специалистам в данной области техники будут понятны другие модификации. Такие модификации могут предполагать другие признаки, которые уже известны на данном уровне техники и которые могут использоваться вместо уже описанных в данном документе признаков или в дополнение к ним.
По результатам изучения чертежей, описания и прилагаемой формулы изобретения могут быть поняты и реализованы модификации описываемых вариантов осуществления. В формуле изобретения слово «содержащий» не исключает другие элементы или этапы, а признак в единственном числе не исключает множества элементов или этапов. Само по себе то обстоятельство, что некоторые критерии излагаются в различных зависимых пунктах формулы изобретения, не означает, что совокупность этих критериев не может использоваться с пользой.
Любые ссылочные позиции в формуле изобретения не должны толковаться как ограничивающие ее объем.
СПИСОК ССЫЛОЧНЫХ ПОЗИЦИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛАЗЕРНЫЙ ДАТЧИК ДЛЯ ОБНАРУЖЕНИЯ ПЛОТНОСТИ ЧАСТИЦ | 2016 |
|
RU2716878C2 |
| ЛАЗЕРНЫЙ ДАТЧИК ДЛЯ ОБНАРУЖЕНИЯ НЕСКОЛЬКИХ ПАРАМЕТРОВ | 2016 |
|
RU2717751C2 |
| МОДУЛЬ ОПТИЧЕСКОГО ДАТЧИКА ЧАСТИЦ | 2017 |
|
RU2719573C1 |
| УСТРОЙСТВО УМЕНЬШЕНИЯ ПОГРЕШНОСТИ ЧУВСТВИТЕЛЬНОСТИ ПО ДАВЛЕНИЮ И ТЕМПЕРАТУРЕ У ВЫСОКОТОЧНЫХ ОПТИЧЕСКИХ ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ ПЕРЕМЕЩЕНИЯ | 2014 |
|
RU2660413C2 |
| ЛАЗЕРНОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАССТОЯНИЯ | 1992 |
|
RU2111510C1 |
| СВЕТОИЗЛУЧАЮЩИЙ МОДУЛЬ | 2011 |
|
RU2516032C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГРАНУЛОМЕТРИЧЕСКОГО СОСТАВА ВОЗДУХА ДЛЯ ДАТЧИКА ПЫЛИ БЕСКАМЕРНОГО ТИПА И МОБИЛЬНОЕ УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2020 |
|
RU2758038C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ СКОРОСТИ | 2011 |
|
RU2595794C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОВЕРХНОСТНЫХ ХАРАКТЕРИСТИК | 1992 |
|
RU2124701C1 |
| Лазерное устройство для формирования 3D изображения | 2022 |
|
RU2807464C1 |


Изобретение относится к области измерительной техники и касается модуля лазерного датчика для определения размера частиц для определения качества воздуха. Модуль содержит лазер, детектор, электрический возбудитель и блок оценки. Лазер излучает света в ответ на сигналы, выдаваемые возбудителем. Детектор выполнен с возможностью определения первого интерференционного сигнала самосмешения оптической волны в лазерном резонаторе лазера, причем интерференционный сигнал самосмешения возникает из-за отраженного от частицы лазерного света, повторно входящего в лазерный резонатор. Блок оценки выполнен с возможностью определения размера частицы путем определения относительного расстояния между частицей и лазером и определения информации об амплитуде с помощью первого интерференционного сигнала самосмешения. Модуль лазерного датчика дополнительно содержит область фокусирования, причем относительное расстояние относится к расстоянию между областью фокусирования и частицей, и блок оценки выполнен с возможностью определения относительного расстояния на основе по меньшей мере одной характеристики первого интерференционного сигнала самосмешения, связанной с расстоянием между первой областью фокусирования и частицей. Технический результат заключается в упрощении конструкции устройства. 5 н. и 10 з.п. ф-лы, 11 ил.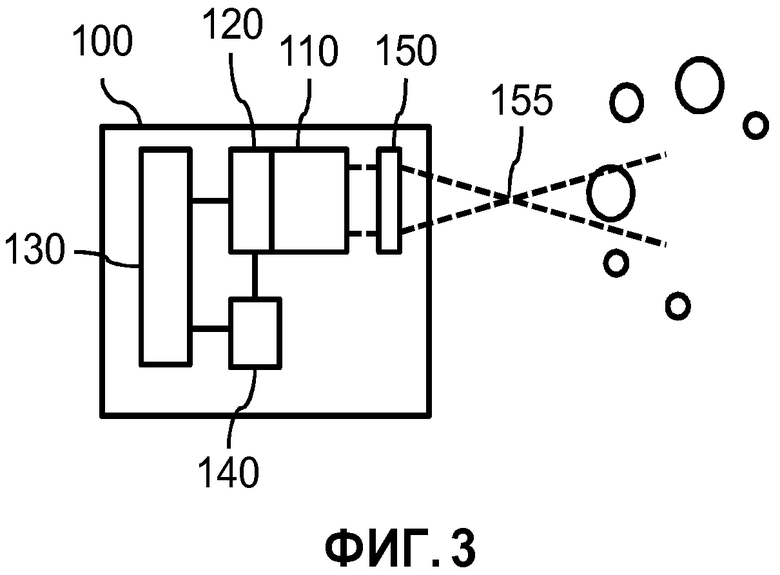
1. Модуль (100) лазерного датчика для определения размера частиц для определения качества воздуха, причем модуль (100) лазерного датчика содержит по меньшей мере один первый лазер (110), по меньшей мере один первый детектор (120), по меньшей мере один электрический возбудитель (130) и по меньшей мере один блок (140) оценки, причем указанный первый лазер (110) выполнен с возможностью излучения первого лазерного света в ответ на сигналы, выдаваемые указанным по меньшей мере одним возбудителем (130), причем указанный по меньшей мере один первый детектор (120) выполнен с возможностью определения первого интерференционного сигнала (30) самосмешения оптической волны в первом лазерном резонаторе первого лазера (110), причем первый интерференционный сигнал (30) самосмешения возникает из-за первого отраженного лазерного света, повторно входящего в первый лазерный резонатор, причем первый отраженный лазерный свет отражается частицей, принимающей по меньшей мере часть первого лазерного света, отличающийся тем, что блок (140) оценки выполнен с возможностью определения размера частицы путем определения первого относительного расстояния между частицей и первым лазером (110) с помощью первого интерференционного сигнала (30) самосмешения и путем определения первой информации об амплитуде с помощью первого интерференционного сигнала самосмешения (30), причем модуль лазерного датчика дополнительно содержит по меньшей мере одну первую область (155) фокусирования, причем первое относительное расстояние относится к расстоянию между первой областью (155) фокусирования и частицей, и причем блок (140) оценки выполнен с возможностью определения первого относительного расстояния на основе по меньшей мере одной характеристики первого интерференционного сигнала (30) самосмешения, связанной с расстоянием между первой областью (155) фокусирования и частицей, и причем первая информация об амплитуде содержит максимальную или минимальную амплитуду первого интерференционного сигнала (30) самосмешения, и причем указанная по меньшей мере одна характеристика первого интерференционного сигнала (30) самосмешения, связанная с расстоянием между первой областью (155) фокусирования и частицей, содержит по меньшей мере одно из фазовой информации, числа колебаний, числа относительных максимумов или минимумов, соотношения амплитуд относительных максимумов и минимумов, числа переходов через ноль в заданном интервале первого интерференционного сигнала (30) самосмешения, одного или более расстояний между переходами через ноль и формы огибающей первого интерференционного сигнала (30) самосмешения.
2. Модуль (100) лазерного датчика по п. 1, в котором модуль лазера дополнительно содержит по меньшей мере одно первое оптическое устройство (150) для фокусирования первого лазерного света в первой области (155) фокусирования.
3. Модуль (100) лазерного датчика по п. 1, в котором блок (140) оценки выполнен с возможностью определения абсолютного максимума или минимума амплитуды первого сигнала для первого интерференционного сигнала (30) самосмешения, и при этом блок (140) оценки выполнен с возможностью определения первого числа относительных максимумов или минимумов первого интерференционного сигнала (30) самосмешения в заданном диапазоне около абсолютного максимума или минимума первого интерференционного сигнала (30) самосмешения, и при этом блок (140) оценки выполнен с возможностью определения первого относительного расстояния до частицы с помощью числа максимумов или минимумов первого интерференционного сигнала (30) самосмешения в заданном диапазоне, и при этом блок (140) оценки дополнительно выполнен с возможностью определения размера частицы с помощью определенного первого относительного расстояния до частицы и абсолютного максимума или минимума амплитуды первого сигнала для первого интерференционного сигнала (30) самосмешения.
4. Модуль (100) лазерного датчика по п. 3, в котором блок (140) оценки выполнен с возможностью уточнения определения первого относительного расстояния до частицы на основе соотношения между абсолютным максимумом амплитуды первого сигнала для первого интерференционного сигнала (30) самосмешения и амплитудой первого интерференционного сигнала (30) самосмешения в по меньшей мере одном из относительных максимумов первого интерференционного сигнала (30) самосмешения или на основе соотношения между абсолютным минимумом амплитуды первого сигнала для первого интерференционного сигнала (30) самосмешения и амплитудой первого интерференционного сигнала (30) самосмешения в по меньшей мере одном из относительных минимумов первого интерференционного сигнала (30) самосмешения.
5. Модуль (100) лазерного датчика по любому из пп. 1 или 2, в котором модуль (100) лазерного датчика выполнен с возможностью обеспечения заданного распределения скоростей группы частиц, содержащей частицу, по отношению к первой области (155) фокусирования.
6. Модуль (100) лазерного датчика по любому из пп. 1 или 2, в котором электрический возбудитель (130) выполнен с возможностью выдачи модулированного первого тока возбуждения в первый лазер (100), и при этом блок (140) оценки выполнен с возможностью определения первого относительного расстояния до частицы на основе первого интерференционного сигнала (30) самосмешения, возникающего в результате первого модулированного тока возбуждения.
7. Модуль лазерного датчика по п. 6, в котором модулированный первый ток возбуждения содержит по меньшей мере первую схему возбуждения и вторую схему возбуждения, причем первая схема возбуждения отличается от второй схемы возбуждения.
8. Модуль (100) лазерного датчика по любому из пп. 1 или 2, в котором модуль (100) лазерного датчика дополнительно содержит первое подвижное зеркало (170) для перенаправления первого лазерного света, причем модуль (100) лазерного датчика выполнен с возможностью управления перемещением первого подвижного зеркала (170) таким образом, что определение размера частиц ниже заданного порога размера исключено.
9. Модуль (100) лазерного датчика по любому из пп. 1 или 2, в котором модуль (100) лазерного датчика содержит по меньшей мере второй лазер (111) и по меньшей мере второй детектор (121), причем второй лазер (111) выполнен с возможностью излучения второго лазерного света, причем второй лазерный свет имеет вторую длину волны, отличающуюся от первых длин волн первого лазерного света, причем второй детектор (121) выполнен с возможностью определения второго интерференционного сигнала самосмешения оптической волны во втором лазерном резонаторе второго лазера (111), причем второй интерференционный сигнал самосмешения возникает из-за второго отраженного лазерного света, повторно входящего во второй лазерный резонатор, причем второй отраженный лазерный свет отражается частицей, принимающей по меньшей мере часть второго лазерного света, и причем блок (140) оценки выполнен с возможностью уточнения определения размера частицы путем определения второго относительного расстояния между частицей и вторым лазером (111) с помощью второго интерференционного сигнала самосмешения.
10. Модуль (100) лазерного датчика по п. 1, в котором модуль (100) лазерного датчика содержит по меньшей мере одно первое оптическое устройство (150) для фокусирования первого лазерного света в первой области (155) фокусирования, причем модуль (100) лазерного датчика дополнительно содержит по меньшей мере второй лазер (111), по меньшей мере второй детектор (121) и по меньшей мере одно второе оптическое устройство (156) для фокусирования второго лазерного света, излучаемого вторым лазером (111), во второй области (158) фокусирования, причем второй детектор (121) выполнен с возможностью определения второго интерференционного сигала самосмешения оптической волны во втором лазерном резонаторе второго лазера (111), причем второй интерференционный сигнал самосмешения возникает из-за второго отраженного лазерного света, повторно входящего во второй лазерный резонатор, причем второй отраженный лазерный свет отражается частицей, принимающей по меньшей мере часть второго лазерного света, и причем блок (140) оценки выполнен с возможностью уточнения определения размера частицы путем определения второго относительного расстояния между частицей и вторым лазером (111) с помощью второго интерференционного сигнала самосмешения.
11. Модуль лазерного датчика по п. 10, в котором первый размер первой области (155) фокусирования отличается от второго размера второй области (158) фокусирования.
12. Устройство мобильной связи, содержащее детектор частиц, причем детектор частиц содержит по меньшей мере один модуль (100) лазерного датчика по любому из предыдущих пунктов.
13. Способ определения размера частиц для определения качества воздуха, причем способ включает в себя этапы:
- излучения первого лазерного света с помощью первого лазера (110) в по меньшей мере одну первую область (155) фокусирования,
- приема первого отраженного лазерного света в первом лазерном резонаторе первого лазера (110), причем первый лазерный свет отражается частицей, принимающей по меньшей мере часть первого лазерного света,
- определения первого интерференционного сигнала (30) самосмешения оптической волны в первом лазерном резонаторе первого лазера (110), причем первый интерференционный сигнал (30) самосмешения возникает из-за первого отраженного лазерного света, повторно входящего в первый лазерный резонатор,
отличающийся тем, что способ включает в себя дополнительные этапы:
- определения размера частицы путем определения первого относительного расстояния между частицей и первым лазером (110) с помощью первого интерференционного сигнала (30) самосмешения и путем определения первой информации об амплитуде с помощью первого интерференционного сигнала самосмешения (30), причем первое относительное расстояние относится к расстоянию между первой областью (155) фокусирования и частицей,
- определения первого относительного расстояния на основе по меньшей мере одной характеристики первого интерференционного сигнала (30) самосмешения, относящейся к расстоянию между первой областью (155) фокусирования и частицей, и при этом первая информация об амплитуде содержит максимальную или минимальную амплитуду первого интерференционного сигнала (30) самосмешения, и при этом указанная по меньшей мере одна характеристика первого интерференционного сигнала (30) самосмешения, относящаяся к расстоянию между первой областью (155) фокусирования и частицей, содержит по меньшей мере одно из фазовой информации, числа колебаний, числа относительных максимумов или минимумов, соотношения амплитуд относительных максимумов и минимумов, числа переходов через ноль в заданном интервале первого интерференционного сигнала (30) самосмешения, одного или более расстояний между переходами через ноль и формы огибающей первого интерференционного сигнала (30) самосмешения.
14. Запоминающее устройство, хранящее компьютерный программный продукт, содержащий средства кода, причем упомянутое запоминающее устройство содержится в модуле (100) лазерного датчика по любому из пп. 1-11, и причем средства кода выполнены таким образом, что способ по п. 13 может осуществляться с помощью по меньшей мере одного устройства обработки, содержащегося в модуле (100) лазерного датчика по любому из пп. 1-11.
15. Запоминающее устройство, хранящее компьютерный программный продукт, содержащий средства кода, причем упомянутое запоминающее устройство содержится в устройстве, содержащем модуль (100) лазерного датчика по любому из пп. 1-11, и причем средства кода выполнены таким образом, что способ по п. 13 может осуществляться с помощью по меньшей мере одного устройства обработки упомянутого устройства, содержащего модуль (100) лазерного датчика по любому из пп. 1-11.
| Seiichi Sudo и др | |||
| "Quick and easy measurement of particle size of Brownian particles and plankton in water using a self-mixing laser", OPTICS EXPRESS, т | |||
| Паровоз для отопления неспекающейся каменноугольной мелочью | 1916 |
|
SU14A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| ТЕПЛОВОЙ ДВИГАТЕЛЬ | 1924 |
|
SU1044A1 |
| WO 2002037410 A1, 10.05.2002 | |||
| US 2010134803 A1, 03.06.2010 | |||
| US 2010231909 A1, 16.09.2010. | |||

